mat 1320 a: calculus i 11th.pdf · mat 1320 a: calculus i trigonometry inverse trigonometric...
TRANSCRIPT
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
MAT 1320 A: Calculus I
Paul-Eugene ParentDepartment of Mathematics and Statistics
University of Ottawa
September 11th, 2013

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Outline
1 Trigonometry
2 Inverse Trigonometric Functions
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
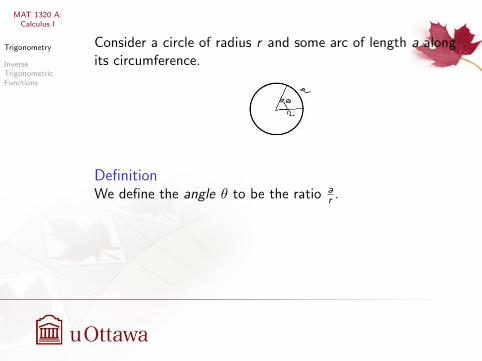
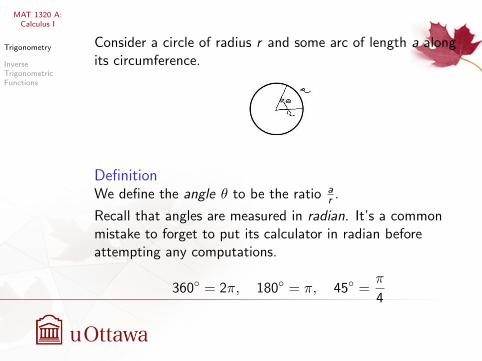
Consider a circle of radius r and some arc of length a alongits circumference.
DefinitionWe define the angle θ to be the ratio a
r .
Recall that angles are measured in radian. It’s a commonmistake to forget to put its calculator in radian beforeattempting any computations.
360◦ = 2π, 180◦ = π, 45◦ =π
4
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Consider a circle of radius r and some arc of length a alongits circumference.
DefinitionWe define the angle θ to be the ratio a
r .
Recall that angles are measured in radian. It’s a commonmistake to forget to put its calculator in radian beforeattempting any computations.
360◦ = 2π, 180◦ = π, 45◦ =π
4
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
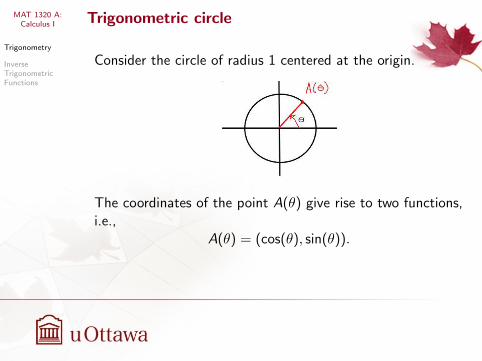
Trigonometric circle
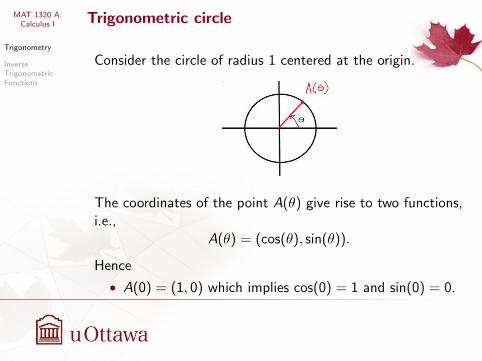
Consider the circle of radius 1 centered at the origin.
The coordinates of the point A(θ) give rise to two functions,i.e.,
A(θ) = (cos(θ), sin(θ)).
Hence
• A(0) = (1, 0) which implies cos(0) = 1 and sin(0) = 0.
• A(π2 ) = (0, 1) which implies cos(π2 ) = 0 and sin(π2 ) = 1

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Trigonometric circle
Consider the circle of radius 1 centered at the origin.
The coordinates of the point A(θ) give rise to two functions,i.e.,
A(θ) = (cos(θ), sin(θ)).
Hence
• A(0) = (1, 0) which implies
cos(0) = 1 and sin(0) = 0.
• A(π2 ) = (0, 1) which implies cos(π2 ) = 0 and sin(π2 ) = 1
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Trigonometric circle
Consider the circle of radius 1 centered at the origin.
The coordinates of the point A(θ) give rise to two functions,i.e.,
A(θ) = (cos(θ), sin(θ)).
Hence
• A(0) = (1, 0) which implies cos(0) = 1 and sin(0) = 0.
• A(π2 ) = (0, 1) which implies cos(π2 ) = 0 and sin(π2 ) = 1

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Trigonometric circle
Consider the circle of radius 1 centered at the origin.
The coordinates of the point A(θ) give rise to two functions,i.e.,
A(θ) = (cos(θ), sin(θ)).
Hence
• A(0) = (1, 0) which implies cos(0) = 1 and sin(0) = 0.
• A(π2 ) = (0, 1) which implies
cos(π2 ) = 0 and sin(π2 ) = 1

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Trigonometric circle
Consider the circle of radius 1 centered at the origin.
The coordinates of the point A(θ) give rise to two functions,i.e.,
A(θ) = (cos(θ), sin(θ)).
Hence
• A(0) = (1, 0) which implies cos(0) = 1 and sin(0) = 0.
• A(π2 ) = (0, 1) which implies cos(π2 ) = 0 and sin(π2 ) = 1

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Properties
Clearly the function A(θ) is periodic of period 2π, i.e.,A(θ) = A(θ + 2π). Hence
cos(θ) = cos(θ + 2π) and sin(θ) = sin(θ + 2π).
Moreover, cos and sin being the coordinate functions, by thePythagorean Theorem, they must satisfy
cos2(θ) + sin2(θ) = 1.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Properties
Clearly the function A(θ) is periodic of period 2π, i.e.,A(θ) = A(θ + 2π). Hence
cos(θ) = cos(θ + 2π) and sin(θ) = sin(θ + 2π).
Moreover, cos and sin being the coordinate functions, by thePythagorean Theorem, they must satisfy
cos2(θ) + sin2(θ) = 1.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Properties
Clearly the function A(θ) is periodic of period 2π, i.e.,A(θ) = A(θ + 2π). Hence
cos(θ) = cos(θ + 2π) and sin(θ) = sin(θ + 2π).
Moreover, cos and sin being the coordinate functions, by thePythagorean Theorem, they must satisfy
cos2(θ) + sin2(θ) = 1.
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions As one can deduce by either their respective definition or
their associated graph,
• the function sin(θ) is an odd function, i.e.,
sin(−θ) = − sin(θ);
and
• the function cos(θ) is an even function, i.e.,
cos(−θ) = cos(θ).
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions As one can deduce by either their respective definition or
their associated graph,
• the function sin(θ) is an odd function, i.e.,
sin(−θ) = − sin(θ); and
• the function cos(θ) is an even function, i.e.,
cos(−θ) = cos(θ).

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
y = sin(x)

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
y = cos(x)

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Classical angles
θ 0 π6
π4
π3
π2 π 3π
2 2π
sin(θ) 0 12
√22
√32 1 0 −1 0
cos(θ) 1√32
√22
12 0 −1 0 1
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Other trigonometric functions
tan(θ) :=sin(θ)
cos(θ)and cot(θ) :=
cos(θ)
sin(θ)
and
sec(θ) :=1
cos(θ)and csc(θ) :=
1
sin(θ).

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Other trigonometric functions
tan(θ) :=sin(θ)
cos(θ)and cot(θ) :=
cos(θ)
sin(θ)
and
sec(θ) :=1
cos(θ)and csc(θ) :=
1
sin(θ).

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Identities
From cos2(θ) + sin2(θ) = 1 one can deduce
• 1 + tan2(θ) = sec2(θ); and
• cot2(θ) + 1 = csc2(θ).
Other important identities
• sin(x ± y) = sin(x) cos(y)± sin(y) cos(x); and
• cos(x ± y) = cos(x) cos(y)∓ sin(x) sin(y).

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Identities
From cos2(θ) + sin2(θ) = 1 one can deduce
• 1 + tan2(θ) = sec2(θ); and
• cot2(θ) + 1 = csc2(θ).
Other important identities
• sin(x ± y) = sin(x) cos(y)± sin(y) cos(x);
and
• cos(x ± y) = cos(x) cos(y)∓ sin(x) sin(y).
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Identities
From cos2(θ) + sin2(θ) = 1 one can deduce
• 1 + tan2(θ) = sec2(θ); and
• cot2(θ) + 1 = csc2(θ).
Other important identities
• sin(x ± y) = sin(x) cos(y)± sin(y) cos(x); and
• cos(x ± y) = cos(x) cos(y)∓ sin(x) sin(y).

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Exercises at home
Show that
• sin(2x) = 2 sin(x) cos(x);
and
•
cos(2x) = cos2(x)− sin2(x)
= 2 cos2(x)− 1
= 1− 2 sin2(x)

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Exercises at home
Show that
• sin(2x) = 2 sin(x) cos(x); and
•
cos(2x) = cos2(x)− sin2(x)
= 2 cos2(x)− 1
= 1− 2 sin2(x)

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Exercise
Find all x ∈ [0, 2π] such that sin(x) = sin(2x).
Solution: Recall that sin(2x) = 2 sin(x) cos(x), hence weneed to solve
sin(x) = 2 sin(x) cos(x) equivalently sin(x)(1−2 cos(x)) = 0.
We have two cases
• sin(x) = 0 which implies that x = 0, π, or 2π; or
• 1− 2 cos(x) = 0 which implies cos(x) = 12 or
equivalently x = π3 or 5π
3 .
Conclusion: The solutions are x = 0, π3 , π,5π3 , or 2π.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Exercise
Find all x ∈ [0, 2π] such that sin(x) = sin(2x).
Solution: Recall that sin(2x) = 2 sin(x) cos(x),
hence weneed to solve
sin(x) = 2 sin(x) cos(x) equivalently sin(x)(1−2 cos(x)) = 0.
We have two cases
• sin(x) = 0 which implies that x = 0, π, or 2π; or
• 1− 2 cos(x) = 0 which implies cos(x) = 12 or
equivalently x = π3 or 5π
3 .
Conclusion: The solutions are x = 0, π3 , π,5π3 , or 2π.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Exercise
Find all x ∈ [0, 2π] such that sin(x) = sin(2x).
Solution: Recall that sin(2x) = 2 sin(x) cos(x), hence weneed to solve
sin(x) = 2 sin(x) cos(x)
equivalently sin(x)(1−2 cos(x)) = 0.
We have two cases
• sin(x) = 0 which implies that x = 0, π, or 2π; or
• 1− 2 cos(x) = 0 which implies cos(x) = 12 or
equivalently x = π3 or 5π
3 .
Conclusion: The solutions are x = 0, π3 , π,5π3 , or 2π.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Exercise
Find all x ∈ [0, 2π] such that sin(x) = sin(2x).
Solution: Recall that sin(2x) = 2 sin(x) cos(x), hence weneed to solve
sin(x) = 2 sin(x) cos(x) equivalently sin(x)(1−2 cos(x)) = 0.
We have two cases
• sin(x) = 0 which implies that x = 0, π, or 2π; or
• 1− 2 cos(x) = 0 which implies cos(x) = 12 or
equivalently x = π3 or 5π
3 .
Conclusion: The solutions are x = 0, π3 , π,5π3 , or 2π.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Exercise
Find all x ∈ [0, 2π] such that sin(x) = sin(2x).
Solution: Recall that sin(2x) = 2 sin(x) cos(x), hence weneed to solve
sin(x) = 2 sin(x) cos(x) equivalently sin(x)(1−2 cos(x)) = 0.
We have two cases
• sin(x) = 0 which implies that x = 0, π, or 2π;
or
• 1− 2 cos(x) = 0 which implies cos(x) = 12 or
equivalently x = π3 or 5π
3 .
Conclusion: The solutions are x = 0, π3 , π,5π3 , or 2π.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Exercise
Find all x ∈ [0, 2π] such that sin(x) = sin(2x).
Solution: Recall that sin(2x) = 2 sin(x) cos(x), hence weneed to solve
sin(x) = 2 sin(x) cos(x) equivalently sin(x)(1−2 cos(x)) = 0.
We have two cases
• sin(x) = 0 which implies that x = 0, π, or 2π; or
• 1− 2 cos(x) = 0 which implies cos(x) = 12 or
equivalently x = π3 or 5π
3 .
Conclusion: The solutions are x = 0, π3 , π,5π3 , or 2π.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Exercise
Find all x ∈ [0, 2π] such that sin(x) = sin(2x).
Solution: Recall that sin(2x) = 2 sin(x) cos(x), hence weneed to solve
sin(x) = 2 sin(x) cos(x) equivalently sin(x)(1−2 cos(x)) = 0.
We have two cases
• sin(x) = 0 which implies that x = 0, π, or 2π; or
• 1− 2 cos(x) = 0 which implies cos(x) = 12 or
equivalently x = π3 or 5π
3 .
Conclusion: The solutions are x = 0, π3 , π,5π3 , or 2π.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
The problem
We want to “invert” the trigonometric functions. Recall thatthe domain and the range of sin(x) and cos(x) are the realnumbers. Two problems arise:
• both functions are periodic. Hence they are notone-to-one; and
• both functions are not onto as their images are [−1, 1].
We then need to consider restricted versions of thosefunctions if we want to proceed.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
The problem
We want to “invert” the trigonometric functions. Recall thatthe domain and the range of sin(x) and cos(x) are the realnumbers. Two problems arise:
• both functions are periodic. Hence they are notone-to-one;
and
• both functions are not onto as their images are [−1, 1].
We then need to consider restricted versions of thosefunctions if we want to proceed.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
The problem
We want to “invert” the trigonometric functions. Recall thatthe domain and the range of sin(x) and cos(x) are the realnumbers. Two problems arise:
• both functions are periodic. Hence they are notone-to-one; and
• both functions are not onto as their images are [−1, 1].
We then need to consider restricted versions of thosefunctions if we want to proceed.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
The problem
We want to “invert” the trigonometric functions. Recall thatthe domain and the range of sin(x) and cos(x) are the realnumbers. Two problems arise:
• both functions are periodic. Hence they are notone-to-one; and
• both functions are not onto as their images are [−1, 1].
We then need to consider restricted versions of thosefunctions if we want to proceed.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
y = Sin(x)
In the case of sin(x) we consider the classical domain[−π
2 ,π2 ] and the restricted function
Sin : [−π2,π
2] −→ [−1, 1]
x 7→ sin(x)

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Green graph is y = Sin(x)
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions Hence the function y = Sin(x) is now onto and one-to-one
and thus admits an inverse function
arcsin : [−1, 1] −→ [−π2,π
2].
In particular
• arcsin(Sin(x)) = x for all x ∈ [−π2 ,
π2 ];
• Sin(arcsin(x)) = x for all x ∈ [−1, 1]; and
• y = arcsin(x) if and only if Sin(y) = x .
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions Hence the function y = Sin(x) is now onto and one-to-one
and thus admits an inverse function
arcsin : [−1, 1] −→ [−π2,π
2].
In particular
• arcsin(Sin(x)) = x for all x ∈ [−π2 ,
π2 ];
• Sin(arcsin(x)) = x for all x ∈ [−1, 1]; and
• y = arcsin(x) if and only if Sin(y) = x .
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions Hence the function y = Sin(x) is now onto and one-to-one
and thus admits an inverse function
arcsin : [−1, 1] −→ [−π2,π
2].
In particular
• arcsin(Sin(x)) = x for all x ∈ [−π2 ,
π2 ];
• Sin(arcsin(x)) = x for all x ∈ [−1, 1];
and
• y = arcsin(x) if and only if Sin(y) = x .

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions Hence the function y = Sin(x) is now onto and one-to-one
and thus admits an inverse function
arcsin : [−1, 1] −→ [−π2,π
2].
In particular
• arcsin(Sin(x)) = x for all x ∈ [−π2 ,
π2 ];
• Sin(arcsin(x)) = x for all x ∈ [−1, 1]; and
• y = arcsin(x) if and only if Sin(y) = x .

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
y = arcsin(x)
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
y = Cos(x) and y = Tan(x)
We can play this game with the cos(x) and tan(x) functions.To make them both onto and one-to-one we restrict theirrespective domain and range as
• Cos : [0, π] −→ [−1, 1];
and
• Tan : ]− π2 ,
π2 [−→ R.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
y = Cos(x) and y = Tan(x)
We can play this game with the cos(x) and tan(x) functions.To make them both onto and one-to-one we restrict theirrespective domain and range as
• Cos : [0, π] −→ [−1, 1]; and
• Tan : ]− π2 ,
π2 [−→ R.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Blue graph is y = Cos(x)

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Blue graph is y = Tan(x)

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions Hence both y = Cos(x) and y = Tan(x) admit inverses, i.e.,
• arccos : [−1, 1] −→ [0, π];
and
• arctan : R −→ ]− π2 ,
π2 [
with the usual identities
• arccos(Cos(x)) = x for all x ∈ [0, π];
• Cos(arccos(x)) = x for all x ∈ [−1, 1];
• arctan(Tan(x)) = x for all x ∈]− π2 ,
π2 [; and
• Tan(arctan(x)) = x for all x ∈ R.
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions Hence both y = Cos(x) and y = Tan(x) admit inverses, i.e.,
• arccos : [−1, 1] −→ [0, π]; and
• arctan : R −→ ]− π2 ,
π2 [
with the usual identities
• arccos(Cos(x)) = x for all x ∈ [0, π];
• Cos(arccos(x)) = x for all x ∈ [−1, 1];
• arctan(Tan(x)) = x for all x ∈]− π2 ,
π2 [; and
• Tan(arctan(x)) = x for all x ∈ R.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions Hence both y = Cos(x) and y = Tan(x) admit inverses, i.e.,
• arccos : [−1, 1] −→ [0, π]; and
• arctan : R −→ ]− π2 ,
π2 [
with the usual identities
• arccos(Cos(x)) = x for all x ∈ [0, π];
• Cos(arccos(x)) = x for all x ∈ [−1, 1];
• arctan(Tan(x)) = x for all x ∈]− π2 ,
π2 [; and
• Tan(arctan(x)) = x for all x ∈ R.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions Hence both y = Cos(x) and y = Tan(x) admit inverses, i.e.,
• arccos : [−1, 1] −→ [0, π]; and
• arctan : R −→ ]− π2 ,
π2 [
with the usual identities
• arccos(Cos(x)) = x for all x ∈ [0, π];
• Cos(arccos(x)) = x for all x ∈ [−1, 1];
• arctan(Tan(x)) = x for all x ∈]− π2 ,
π2 [; and
• Tan(arctan(x)) = x for all x ∈ R.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions Hence both y = Cos(x) and y = Tan(x) admit inverses, i.e.,
• arccos : [−1, 1] −→ [0, π]; and
• arctan : R −→ ]− π2 ,
π2 [
with the usual identities
• arccos(Cos(x)) = x for all x ∈ [0, π];
• Cos(arccos(x)) = x for all x ∈ [−1, 1];
• arctan(Tan(x)) = x for all x ∈]− π2 ,
π2 [;
and
• Tan(arctan(x)) = x for all x ∈ R.

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions Hence both y = Cos(x) and y = Tan(x) admit inverses, i.e.,
• arccos : [−1, 1] −→ [0, π]; and
• arctan : R −→ ]− π2 ,
π2 [
with the usual identities
• arccos(Cos(x)) = x for all x ∈ [0, π];
• Cos(arccos(x)) = x for all x ∈ [−1, 1];
• arctan(Tan(x)) = x for all x ∈]− π2 ,
π2 [; and
• Tan(arctan(x)) = x for all x ∈ R.
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
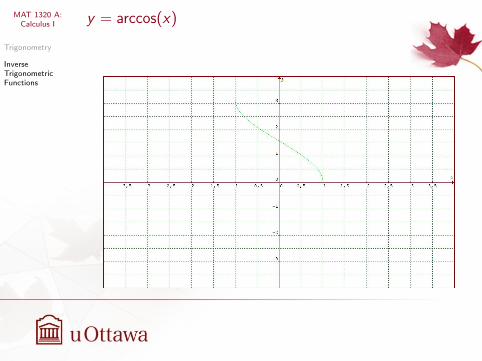
y = arccos(x)

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
y = arctan(x)

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Exercises
Simplify the expression cos(arctan(x)).
Solution:
On one hand we know that
y = arctan(x)⇐⇒ Tan(y) = x for y ∈]− π
2,π
2[.
On the other hand we have the trigonometric identity
sec2 y = 1 + tan2 y
= 1 + x2 why?
Finally
cos(arctan(x)) = cos(y) =1
sec(y)=
1√1 + x2
... why?

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Exercises
Simplify the expression cos(arctan(x)).
Solution: On one hand we know that
y = arctan(x)⇐⇒ Tan(y) = x for y ∈]− π
2,π
2[.
On the other hand we have the trigonometric identity
sec2 y = 1 + tan2 y
= 1 + x2 why?
Finally
cos(arctan(x)) = cos(y) =1
sec(y)=
1√1 + x2
... why?
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Exercises
Simplify the expression cos(arctan(x)).
Solution: On one hand we know that
y = arctan(x)⇐⇒ Tan(y) = x for y ∈]− π
2,π
2[.
On the other hand we have the trigonometric identity
sec2 y = 1 + tan2 y
= 1 + x2 why?
Finally
cos(arctan(x)) = cos(y) =1
sec(y)=
1√1 + x2
... why?

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Exercises
Simplify the expression cos(arctan(x)).
Solution: On one hand we know that
y = arctan(x)⇐⇒ Tan(y) = x for y ∈]− π
2,π
2[.
On the other hand we have the trigonometric identity
sec2 y = 1 + tan2 y
= 1 + x2 why?
Finally
cos(arctan(x)) = cos(y) =1
sec(y)=
1√1 + x2
... why?

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Exercises
Simplify the expression cos(arctan(x)).
Solution: On one hand we know that
y = arctan(x)⇐⇒ Tan(y) = x for y ∈]− π
2,π
2[.
On the other hand we have the trigonometric identity
sec2 y = 1 + tan2 y
= 1 + x2 why?
Finally
cos(arctan(x)) = cos(y) =1
sec(y)=
1√1 + x2
... why?
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Exercises
Simplify the expression cos(arctan(x)).
Solution: On one hand we know that
y = arctan(x)⇐⇒ Tan(y) = x for y ∈]− π
2,π
2[.
On the other hand we have the trigonometric identity
sec2 y = 1 + tan2 y
= 1 + x2 why?
Finally
cos(arctan(x)) = cos(y) =1
sec(y)=
1√1 + x2
... why?
MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Compute exactly tan(arcsin(1/3))
Solution:
On one hand we know that
θ = arcsin(1/3)⇐⇒ Sin(θ) = 1/3 when θ ∈ [−π2,π
2].
On the other hand we have the trigonometric identitycos2 θ = 1− sin2 θ.Since θ ∈ [−π
2 ,π2 ], we thus have cos θ =
√1− sin2 θ.
Finally tan(arcsin(1/3)) = tan θ = sin θcos θ = sin θ√
1−sin2 θ=
1/3√1−(1/3)2
=√24 .

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Compute exactly tan(arcsin(1/3))
Solution: On one hand we know that
θ = arcsin(1/3)⇐⇒ Sin(θ) = 1/3 when θ ∈ [−π2,π
2].
On the other hand we have the trigonometric identitycos2 θ = 1− sin2 θ.Since θ ∈ [−π
2 ,π2 ], we thus have cos θ =
√1− sin2 θ.
Finally tan(arcsin(1/3)) = tan θ = sin θcos θ = sin θ√
1−sin2 θ=
1/3√1−(1/3)2
=√24 .

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Compute exactly tan(arcsin(1/3))
Solution: On one hand we know that
θ = arcsin(1/3)⇐⇒ Sin(θ) = 1/3 when θ ∈ [−π2,π
2].
On the other hand we have the trigonometric identitycos2 θ = 1− sin2 θ.
Since θ ∈ [−π2 ,
π2 ], we thus have cos θ =
√1− sin2 θ.
Finally tan(arcsin(1/3)) = tan θ = sin θcos θ = sin θ√
1−sin2 θ=
1/3√1−(1/3)2
=√24 .

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Compute exactly tan(arcsin(1/3))
Solution: On one hand we know that
θ = arcsin(1/3)⇐⇒ Sin(θ) = 1/3 when θ ∈ [−π2,π
2].
On the other hand we have the trigonometric identitycos2 θ = 1− sin2 θ.Since θ ∈ [−π
2 ,π2 ], we thus have cos θ =
√1− sin2 θ.
Finally tan(arcsin(1/3)) = tan θ = sin θcos θ = sin θ√
1−sin2 θ=
1/3√1−(1/3)2
=√24 .

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Compute exactly tan(arcsin(1/3))
Solution: On one hand we know that
θ = arcsin(1/3)⇐⇒ Sin(θ) = 1/3 when θ ∈ [−π2,π
2].
On the other hand we have the trigonometric identitycos2 θ = 1− sin2 θ.Since θ ∈ [−π
2 ,π2 ], we thus have cos θ =
√1− sin2 θ.
Finally tan(arcsin(1/3)) = tan θ
= sin θcos θ = sin θ√
1−sin2 θ=
1/3√1−(1/3)2
=√24 .

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Compute exactly tan(arcsin(1/3))
Solution: On one hand we know that
θ = arcsin(1/3)⇐⇒ Sin(θ) = 1/3 when θ ∈ [−π2,π
2].
On the other hand we have the trigonometric identitycos2 θ = 1− sin2 θ.Since θ ∈ [−π
2 ,π2 ], we thus have cos θ =
√1− sin2 θ.
Finally tan(arcsin(1/3)) = tan θ = sin θcos θ
= sin θ√1−sin2 θ
=
1/3√1−(1/3)2
=√24 .

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Compute exactly tan(arcsin(1/3))
Solution: On one hand we know that
θ = arcsin(1/3)⇐⇒ Sin(θ) = 1/3 when θ ∈ [−π2,π
2].
On the other hand we have the trigonometric identitycos2 θ = 1− sin2 θ.Since θ ∈ [−π
2 ,π2 ], we thus have cos θ =
√1− sin2 θ.
Finally tan(arcsin(1/3)) = tan θ = sin θcos θ = sin θ√
1−sin2 θ
=
1/3√1−(1/3)2
=√24 .

MAT 1320 A:Calculus I
Trigonometry
InverseTrigonometricFunctions
Compute exactly tan(arcsin(1/3))
Solution: On one hand we know that
θ = arcsin(1/3)⇐⇒ Sin(θ) = 1/3 when θ ∈ [−π2,π
2].
On the other hand we have the trigonometric identitycos2 θ = 1− sin2 θ.Since θ ∈ [−π
2 ,π2 ], we thus have cos θ =
√1− sin2 θ.
Finally tan(arcsin(1/3)) = tan θ = sin θcos θ = sin θ√
1−sin2 θ=
1/3√1−(1/3)2
=√24 .