matem aticas avanzadas: variable compleja, series y...
TRANSCRIPT

Borra
dor Pre
limin
arMatematicas Avanzadas:
Variable Compleja, Series y EcuacionesDiferenciales Ordinarias,
con aplicaciones en Maxima
H. HernandezDepartamento de Fısica, Facultad de Ciencias,Universidad de Los Andes, Merida-Venezuela
L. A. NunezEscuela de Fısica, Facultad de Ciencias,
Universidad Industrial de Santander, Bucaramanga-Colombia
24 de noviembre de 2019

Borra
dor Pre
limin
arIndice general
1. Variable Compleja 101.1. Funciones de Variable Compleja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.1.1. De la recta real al plano complejo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.1.2. Continuidad en el plano complejo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.1.3. Diferenciabilidad de funciones complejas . . . . . . . . . . . . . . . . . . . . . . . . . . 121.1.4. Funciones analıticas y condiciones de Cauchy-Riemann . . . . . . . . . . . . . . . . . . 121.1.5. Curiosidades de Cauchy-Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.1.6. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.1.7. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.1.8. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.2. Puntos, lıneas de corte y ceros de funciones complejas . . . . . . . . . . . . . . . . . . . . . . 211.2.1. Puntos y lıneas de corte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.2.2. Singularidades, polos y ceros de funciones complejas . . . . . . . . . . . . . . . . . . . 231.2.3. Transformaciones conformes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251.2.4. Algunas consecuencias y ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261.2.5. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281.2.6. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321.2.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
1.3. Integrales complejas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 391.3.1. Algunas propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 391.3.2. Teorema integral de Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 391.3.3. El teorema y las regiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 401.3.4. Algunas observaciones y el Teorema de Morera . . . . . . . . . . . . . . . . . . . . . . 411.3.5. Formula integral de Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 421.3.6. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 431.3.7. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 471.3.8. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
2. Series I 502.1. Sucesiones y Series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.1.1. Introduccion a las sucesiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 522.1.2. Acercandonos al concepto de series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 562.1.3. Series elementales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2

Borra
dor Pre
limin
ar
INDICE GENERAL
2.1.4. Derivacion de series geometricas elementales . . . . . . . . . . . . . . . . . . . . . . . . 602.1.5. El metodo de la diferencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 632.1.6. Algebra elemental de series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 652.1.7. Series telescopicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 662.1.8. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 682.1.9. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 692.1.10. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
2.2. Criterios de convergencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 742.2.1. Convergencia absoluta o condicional . . . . . . . . . . . . . . . . . . . . . . . . . . . . 742.2.2. Criterio de Comparacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 752.2.3. Criterio de la Raız . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 762.2.4. Criterio de d’Alembert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 762.2.5. Criterio de la Integral de Maclaurin . . . . . . . . . . . . . . . . . . . . . . . . . . . . 772.2.6. Series alternantes y convergencia condicional . . . . . . . . . . . . . . . . . . . . . . . 792.2.7. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 802.2.8. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 812.2.9. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
2.3. Series de funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 832.3.1. Series de potencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 832.3.2. Convergencia de una serie de potencias . . . . . . . . . . . . . . . . . . . . . . . . . . 842.3.3. Convergencia uniforme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 852.3.4. Criterio Mayorante de Weierstrass . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 862.3.5. Criterio de Abel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 872.3.6. Nota sobre el algebra de series de potencias . . . . . . . . . . . . . . . . . . . . . . . . 882.3.7. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 902.3.8. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 912.3.9. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
2.4. Serie de Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 922.4.1. Algunas series de Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 932.4.2. La expansion binomial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 942.4.3. Sobre la funcion Gamma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 952.4.4. Taylor en varias variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 972.4.5. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 982.4.6. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 982.4.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
2.5. Series de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 992.5.1. Condiciones de Dirichlet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1012.5.2. Consideraciones de simetrıa en series de Fourier . . . . . . . . . . . . . . . . . . . . . . 1032.5.3. El Fenomeno de Gibbs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1042.5.4. Correccion al fenomeno de Gibbs: Factor σ de Lanczos . . . . . . . . . . . . . . . . . . 1052.5.5. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1062.5.6. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1082.5.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
3

Borra
dor Pre
limin
ar
INDICE GENERAL
3. Series II 1113.1. Series y espacios de Hilbert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
3.1.1. Completitud de E∞ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1123.1.2. Conjunto completo de funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1133.1.3. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1153.1.4. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1153.1.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
3.2. Series de Laurent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1153.2.1. Series de Taylor para funciones analıticas . . . . . . . . . . . . . . . . . . . . . . . . . 1153.2.2. Las series de Laurent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1173.2.3. Integracion por el metodo de los residuos: los residuos de Laurent . . . . . . . . . . . . 1193.2.4. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1203.2.5. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1233.2.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
3.3. Teorema del Residuo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1233.3.1. Integrales impropias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1233.3.2. Evaluacion de integrale reales e impropias . . . . . . . . . . . . . . . . . . . . . . . . . 1233.3.3. Integrales impropias del tipo
∫∞−∞ dx f(x) . . . . . . . . . . . . . . . . . . . . . . . . . 124
3.3.4. Integrales de funciones racionales de cos θ y sen θ . . . . . . . . . . . . . . . . . . . . . 1253.3.5. Integrales de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1263.3.6. Otras integrales impropias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1273.3.7. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1293.3.8. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1303.3.9. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
3.4. Tranformadas de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1313.4.1. Propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1313.4.2. Funciones pares e impares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1323.4.3. Bases discreta y contınuas: la base de ondas planas . . . . . . . . . . . . . . . . . . . . 1323.4.4. Tranformadas discretas de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1343.4.5. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1363.4.6. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1363.4.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
4. PolinomiosOrtogonales 1374.1. Series de Polinomios Ortogonales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
4.1.1. Polinomios de Legendre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1384.1.2. Generalidades de los Polinomios de Legendre . . . . . . . . . . . . . . . . . . . . . . . 1384.1.3. Relacion de Recurrencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1404.1.4. Norma de los Polinomios de Legendre . . . . . . . . . . . . . . . . . . . . . . . . . . . 1424.1.5. Funcion Generatriz de los Polinomios de Legendre . . . . . . . . . . . . . . . . . . . . 1434.1.6. Otras propiedades de los polinomios de Legendre . . . . . . . . . . . . . . . . . . . . . 1454.1.7. Potencial Electrostatico de un Dipolo Electrico . . . . . . . . . . . . . . . . . . . . . . 1464.1.8. Resumen de Propiedades Polinomios Legendre . . . . . . . . . . . . . . . . . . . . . . 1474.1.9. Polinomios de Hermite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1474.1.10. Generalidades de los Polinomios de Hemite . . . . . . . . . . . . . . . . . . . . . . . . 1484.1.11. Funcion Generatriz de los Polinomios de Hermite . . . . . . . . . . . . . . . . . . . . . 1514.1.12. Relacion de Recurrencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1524.1.13. Ortogonalidad y Norma de los Polinomios de Hermite . . . . . . . . . . . . . . . . . . 153
4

Borra
dor Pre
limin
ar
INDICE GENERAL
4.1.14. Representacion Integral de los Polinomios de Hermite . . . . . . . . . . . . . . . . . . 1544.1.15. El Oscilador armonico, independiente del tiempo, en Mecanica Cuantica. . . . . . . . 1544.1.16. Resumen de Propiedades Polinomios Hermite . . . . . . . . . . . . . . . . . . . . . . . 1564.1.17. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1564.1.18. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1564.1.19. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
4.2. Planteamiento General para Polinomios Ortogonales . . . . . . . . . . . . . . . . . . . . . . . 1564.2.1. Producto interno generico, norma y ortogonalidad . . . . . . . . . . . . . . . . . . . . 1574.2.2. Formula de Rodrigues genelarizada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1574.2.3. Ejemplos de Polinomios Ortogonales . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1584.2.4. Relaciones de Recurrencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1584.2.5. Funcion generatriz generalizada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1584.2.6. Ecuacion diferencial para los Polinomios Ortogonales . . . . . . . . . . . . . . . . . . . 1594.2.7. Aplicaciones para los polinomios ortogonales . . . . . . . . . . . . . . . . . . . . . . . 1594.2.8. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1654.2.9. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1654.2.10. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
5. Ecuaciones diferenciales ordinarias 1665.1. Motivacion, origen y conceptos basicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
5.1.1. Un ejemplo emblematico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1675.1.2. Ejemplos de algunas ecuaciones diferenciales . . . . . . . . . . . . . . . . . . . . . . . 1725.1.3. De ecuaciones y ecuaciones diferenciales . . . . . . . . . . . . . . . . . . . . . . . . . . 1735.1.4. Orden y linealidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1735.1.5. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1745.1.6. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1745.1.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
5.2. Sobre las soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1745.2.1. Soluciones explıcitas e implıcitas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1745.2.2. Soluciones generales y particulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1755.2.3. Familia de soluciones n−parametricas . . . . . . . . . . . . . . . . . . . . . . . . . . . 1765.2.4. Solucion particular, valores iniciales y valores de contorno . . . . . . . . . . . . . . . . 1765.2.5. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1775.2.6. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1775.2.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
6. Ecuaciones diferenciales de orden 1 1786.1. Soluciones analıticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
6.1.1. Metodos elementales de integracion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1796.1.2. Ecuaciones diferenciales separables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1816.1.3. Variaciones sobre separabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1826.1.4. Ecuaciones diferenciales no separables . . . . . . . . . . . . . . . . . . . . . . . . . . . 1836.1.5. Metodo de las isoclinas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1856.1.6. Ecuaciones diferenciales homogeneas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1866.1.7. Ecuaciones isobaras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1886.1.8. Ecuaciones diferenciales exactas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1896.1.9. Ecuaciones diferenciales lineales de orden 1 . . . . . . . . . . . . . . . . . . . . . . . . 1926.1.10. Ecuaciones diferenciales no lineales y el factor integrador . . . . . . . . . . . . . . . . 193
5

Borra
dor Pre
limin
ar
INDICE GENERAL
6.1.11. Ecuacion de Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1956.1.12. Ecuacion de Riccati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1966.1.13. Un tipo muy especial de ecuacion diferencial no lineal . . . . . . . . . . . . . . . . . . 1986.1.14. Solucion parametrica: ecuaciones no resueltas respecto a la derivada . . . . . . . . . . 1996.1.15. El metodo de las envolventes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2026.1.16. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2046.1.17. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2106.1.18. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
6.2. Soluciones numericas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2126.2.1. Las ideas generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2126.2.2. Metodos y su clasificacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2136.2.3. La idea de la integracion y los metodos . . . . . . . . . . . . . . . . . . . . . . . . . . 2146.2.4. El metodo de Euler y el problema de valores iniciales . . . . . . . . . . . . . . . . . . . 2156.2.5. Los metodos de Runge-Kutta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2156.2.6. Metodos multipaso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2186.2.7. Control del paso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2216.2.8. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2236.2.9. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2236.2.10. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
6.3. Algunas aplicaciones de ecuaciones diferenciales de primer orden . . . . . . . . . . . . . . . . 2236.3.1. Ley de Malthus y el decaimiento radioactivo . . . . . . . . . . . . . . . . . . . . . . . . 2236.3.2. La ecuacion logıstica o ley de Verhulst . . . . . . . . . . . . . . . . . . . . . . . . . . . 2246.3.3. La Ley de enfriamiento de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2256.3.4. Interes compuesto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2266.3.5. Mecanica elemental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2286.3.6. Movimientos con aceleracion constante . . . . . . . . . . . . . . . . . . . . . . . . . . . 2286.3.7. Modelado de concentraciones de soluciones . . . . . . . . . . . . . . . . . . . . . . . . 2326.3.8. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2346.3.9. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2346.3.10. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
7. Ecuaciones diferenciales ordinarias de orden mayor a 1 2357.1. Lineales homogeneas con coeficientes constantes . . . . . . . . . . . . . . . . . . . . . . . . . . 237
7.1.1. Las raıces de la ecuacion caracterıstica son todas diferentes . . . . . . . . . . . . . . . 2397.1.2. Las raıces de la ecuacion caracterıstica se repiten . . . . . . . . . . . . . . . . . . . . . 2397.1.3. Las raıces de la ecuacion caracterıstica son numeros complejos . . . . . . . . . . . . . 2407.1.4. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2407.1.5. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2417.1.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241
7.2. Lineales no homogeneas con coeficientes constantes . . . . . . . . . . . . . . . . . . . . . . . . 2417.2.1. El wronskiano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2427.2.2. El metodo de los coeficientes indeterminados . . . . . . . . . . . . . . . . . . . . . . . 2437.2.3. Metodo de la variacion de parametros . . . . . . . . . . . . . . . . . . . . . . . . . . . 2477.2.4. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2497.2.5. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2537.2.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
7.3. Lineales no homogeneas con coeficientes no constantes . . . . . . . . . . . . . . . . . . . . . . 2537.3.1. Metodo de reduccion del orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
6

Borra
dor Pre
limin
ar
INDICE GENERAL
7.3.2. La ecuacion de Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2557.3.3. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2587.3.4. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2587.3.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
7.4. El operador diferencial y las ecuaciones diferenciales . . . . . . . . . . . . . . . . . . . . . . . 2607.4.1. El operador diferencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2607.4.2. Solucion de ecuaciones diferenciales lineales con el operador polinomial . . . . . . . . . 2627.4.3. El operador inverso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2637.4.4. El operador polinomial inverso y fracciones parciales . . . . . . . . . . . . . . . . . . . 2647.4.5. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2657.4.6. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2677.4.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
7.5. Ecuaciones diferenciales y las transformadas de Laplace . . . . . . . . . . . . . . . . . . . . . 2677.5.1. Algunas definiciones previas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2677.5.2. Transformada de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2687.5.3. Transformadas de Laplace y las ecuaciones diferenciales lineales . . . . . . . . . . . . . 2687.5.4. Integral de Convolucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2717.5.5. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2727.5.6. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2757.5.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
7.6. Algunas aplicaciones de las ecuaciones de orden superior . . . . . . . . . . . . . . . . . . . . . 2757.6.1. Mecanica y Electricidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2757.6.2. Oscilaciones libres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2767.6.3. Oscilaciones libres amortiguadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2777.6.4. Oscilaciones forzadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2797.6.5. Oscilaciones forzadas amortiguadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2817.6.6. Movimiento alrededor de un punto de equilibrio . . . . . . . . . . . . . . . . . . . . . . 2847.6.7. Pendulo simple con desplazamiento finito . . . . . . . . . . . . . . . . . . . . . . . . . 2857.6.8. Digresion elıptica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2917.6.9. ¿Cuan buena es la aproximacion lineal? . . . . . . . . . . . . . . . . . . . . . . . . . . 2947.6.10. El pendulo fısico: integracion numerica . . . . . . . . . . . . . . . . . . . . . . . . . . . 2957.6.11. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2977.6.12. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2977.6.13. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 297
8. Sistemas de ecuaciones diferenciales 2998.1. Algunos comentarios iniciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 300
8.1.1. Notacion matricial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3028.1.2. Sistemas lineales homogeneos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3028.1.3. Sistemas lineales inhomogeneos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3068.1.4. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3088.1.5. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3088.1.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 308
8.2. Sistemas de ecuaciones diferenciales y el uso de operadores . . . . . . . . . . . . . . . . . . . . 3098.2.1. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3158.2.2. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3158.2.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315
8.3. Sistemas y la transformada de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316
7

Borra
dor Pre
limin
ar
INDICE GENERAL
8.3.1. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3188.3.2. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3188.3.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 318
9. Metodos de soluciones por series 3199.1. Otra vez las series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 320
9.1.1. Metodo de Diferenciaciones Sucesiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3239.1.2. Metodos de los Coeficientes Indeterminados . . . . . . . . . . . . . . . . . . . . . . . . 3249.1.3. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3259.1.4. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3269.1.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 326
9.2. Los Puntos y las Estrategias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3269.2.1. Ecuaciones e intervalos en puntos regulares . . . . . . . . . . . . . . . . . . . . . . . . 3279.2.2. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3299.2.3. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3299.2.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 329
9.3. El Metodo de Frobenius . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3309.3.1. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3429.3.2. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3429.3.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342
9.4. Revisitando a Bessel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3439.4.1. Otras formas de la ecuacion de Bessel . . . . . . . . . . . . . . . . . . . . . . . . . . . 3489.4.2. Relaciones de recurrencia: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3499.4.3. Funciones de Bessel y las funciones elementales . . . . . . . . . . . . . . . . . . . . . . 3499.4.4. Reflexion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3509.4.5. Funcion generatriz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3519.4.6. Representacion integral para las funciones de Bessel . . . . . . . . . . . . . . . . . . . 3519.4.7. Ortogonalidad de las funciones de Bessel . . . . . . . . . . . . . . . . . . . . . . . . . . 3529.4.8. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3539.4.9. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3539.4.10. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353
10.Funciones Especiales 35410.1. Funcion Gamma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35510.2. La Funciones Digamma y Poligamma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35910.3. La aproximacion de Stirling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36010.4. La funcion Beta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36110.5. La funcion integral de probabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361
10.5.1. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36210.5.2. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36210.5.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362
11.El problema de Sturm-Liuoville 36311.1. El problema de Sturm-Liuoville . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364
11.1.1. Calculo Operacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36411.1.2. Operadores diferenciales de segundo orden . . . . . . . . . . . . . . . . . . . . . . . . . 36511.1.3. Operadores diferenciales autoadjuntos . . . . . . . . . . . . . . . . . . . . . . . . . . . 36611.1.4. El Sistema Sturm-Liouville . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 368
8

Borra
dor Pre
limin
ar
INDICE GENERAL
11.1.5. Funcion de Green . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37311.1.6. Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37511.1.7. Practicando con Maxima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37511.1.8. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375
12.Apendice 37612.1. Introduccion a los CAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37712.2. Maxima: Sintaxis basica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 379
12.2.1. Calculos elementales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38112.2.2. Bibliotecas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39212.2.3. Maxima en modo texto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39612.2.4. Invocando la ayuda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39712.2.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 398
9

Borra
dor Pre
limin
arCapıtulo 1Variable Compleja
10

Borra
dor Pre
limin
ar
1.1. FUNCIONES DE VARIABLE COMPLEJA
1.1. Funciones de Variable Compleja
La teorıa de funciones de variable compleja se dedica al estudio de funciones que estan definidas en elplano de los numeros complejos. Estas funciones, denominadas holomorfas, se definen en una region abiertadel plano complejo, toman valores complejos y ademas son diferenciable en cada punto de esta region abiertacon derivadas continuas. Como veremos, el concepto de derivada de funciones en variable compleja implicaun desarrollo teorico mas complicado que su contraparte de funciones en variable real.
En los cursos previos de calculo, seguramente vimos el concepto de funcion analıtica: funcion que esequivalente a una serie de potencias (serie de Taylor) convergente, suave (existen todas las derivadas detodos los ordenes) y con infinitas derivadas. Esta nocion se puede extender a calculo en variable complejapero con otras propiedades.
En variable compleja, las funciones infinitamente diferenciables, en una region abierta siempre son analıti-cas, y se denominan funciones holomorfas. Es decir, toda funcion holomorfa permite una representacion enserie de potencias en algun disco abierto donde la serie converge a la funcion. Si la serie de potencias convergeen todo el plano complejo se dice que la funcion es una funcion entera. Recordemos que no toda funcion devariable real infinitamente derivable es necesariamente analıtica. En otras palabras, toda funcion holomorfacumple con la definicion de funcion analıtica pero no toda funcion analıtica es holomorfa.
El calculo en variable compleja surge de manera natural en diferentes ramas de la matematica aplicada,la mecanica cuantica, geometrıa algebraica, combinatoria analıtica, la teorıa de numeros.
1.1.1. De la recta real al plano complejo
La idea de funcion de variable (o variables) reales puede ser extendida (continuada, le dicen tambien)al plano complejo. La idea es la de siempre: si en una determinada region del plano complejo a un numerocomplejo z le corresponde un numero (o varios numeros) complejos w = f(z), diremos que f(z) es unafuncion de variable compleja z. Obvio que f(z) puede ser biyectiva, en cuyo caso tendremos que a z le estaraasociado uno y solo un numero complejo w = f(z). Es claro tambien que siempre se podra expresar
f(z) = w = u(x, y) + iv(x, y) , (1.1)
con u(x, y) la parte real y v(x, y) la parte imaginaria. Es decir, toda funcion en variable compleja
f : C→ C
se puede descomponer en dos partes
u : R2 → R y v : R2 → R
Esta representacion tiene una interpretacion adicional. Como representamos un numero complejo en elplano 0xy como z = x+ iy, pero w = f(z) tambien podra ser representada como un punto en el plano 0uv.Entonces, desde el punto de vista geometrico una funcion de variable compleja podra ser entendida comouna ley de transformacion entre pares de puntos (x, y) del plano 0xy del argumento z y los puntos (u, v) delplano 0uv de valor w.
1.1.2. Continuidad en el plano complejo
Podemos tambien extender el concepto de continuidad de una funcion de variable real a una funcionde variable compleja. Esto es: diremos que una funcion compleja1 w = f(z) sera continua en z0 si para un
1A partir de ahora y por razones de simplicidad llamaremos a f(z) funcion compleja en vez de funcion de variable compleja.
11

Borra
dor Pre
limin
ar
1.1. FUNCIONES DE VARIABLE COMPLEJA
ε > 0 siempre existe un δ > 0 tal que |z − z0| < δ tan pequeno como uno quiera y siempre puede encontrar|f(z)− f(z0)| < ε. La otra manera de verlo es la estandar: si existe el lımite cuando z → z0, es decir,
lımz→z0
f(z) = f(z0) . (1.2)
En este punto se pueden resaltar que los lımites (y con ello la idea de continuidad) en el plano complejohereda las sutilezas y dificultades de los lımites y continuidades de las funciones en varias variables. Ensegundo lugar cabe senalar que la diferencia con las funciones de variable real radica en que los ε y δ sonradios de un cırculo centrado en f(z0) y z0, respectivamente. Adicionalmente, para el caso de las funcionescomplejas no tiene sentido los lımites por la derecha y por la izquierda que planteabamos para funciones devariable real. Tambien es obvio que si
f(z) = u(x, y) + iv(x, y) , con u(x, y) y v(x, y) continuas en (x0, y0) (1.3)
entonces f(z) sera continua en z0 = x0 + iy0.
1.1.3. Diferenciabilidad de funciones complejas
La dificultad que subyace en esta definicion es equivalente a las dificultades que enfrentamos en las defi-niciones de derivadas para funciones de varias variables. Diremos entonces que, una funcion f(z) univaluadaen una region S sera diferenciable en esa region si la derivada
f ′(z) =df
dz= lım
∆z→0
f(z + ∆z)− f(z)
∆z
= lım∆x,∆y→0
[u(x+ ∆x, y + ∆y)− u(x, y)] + i [v(x+ ∆x, y + ∆y)− v(x, y)]
∆x+ i∆y, (1.4)
existe y es unica.Una vez mas, al igual que en el caso de funciones de varias variables, el concepto de lımite (y con este
el de derivada), debe existir sin importar la ruta o forma de aproximacion al punto sobre el cual estamoscalculando la derivada. Esto es, si ∆z → 0⇔ ∆x+ i∆y → 0, entonces
f ′(z)∆y=0 = lım∆x→0
[u(x+ ∆x, y)− u(x, y)] + i [v(x+ ∆x, y)− v(x, y)]
∆x,
f ′(z)∆x=0 = −i lım∆y→0
[u(x, y + ∆y)− u(x, y)] + i [v(x, y + ∆y)− v(x, y)]
∆y.
1.1.4. Funciones analıticas y condiciones de Cauchy-Riemann
Diremos que una funcion es analıtica (holomorfa o regular) en una region S, si es univaluada y derivableen todos los puntos dentro de esa misma region S. Puede darse el caso de que sea analıtica en la regionexcepto en un numero finito de puntos (donde es singular). Entonces diremos que es es analıtica (holomorfao regular) en S, excepto en esos puntos.
Una funcion se denomina una funcion entera si esta es analıtica en todos los puntos del plano finito, comopor ejemplo, los polinomios.
A partir de dos estrategias (muy particulares) de aproximacion a ∆z → 0 tales como ∆y = 0; ∆x → 0o ∆x = 0; ∆y → 0, podremos encontrar un criterio para identificar donde, una funcion compleja, f(z), esanalıtica. Esto es
12
Borra
dor Pre
limin
ar
1.1. FUNCIONES DE VARIABLE COMPLEJA
f ′(z)∆y=0 = lım∆x→0
[u(x+ ∆x, y)− u(x, y)] + i [v(x+ ∆x, y)− v(x, y)]
∆x
= lım∆x→0
[∆u(x, y)
∆x+ i
∆v(x, y)
∆x
],
f ′(z)∆x=0 = −i lım∆y→0
[u(x, y + ∆y)− u(x, y)] + i [v(x, y + ∆y)− v(x, y)]
∆y
= lım∆y→0
[−i∆u(x, y)
∆y+
∆v(x, y)
∆y
],
y ambas tienen que coincidir. Con lo cual
f ′(z)∆y=0 = f ′(z)∆x=0 ⇔ lım∆x→0
[∆u(x, y)
∆x+ i
∆v(x, y)
∆x
]= lım
∆y→0
[−i∆u(x, y)
∆y+
∆v(x, y)
∆y
],
y equivalentemente
f ′(z)∆y=0 = f ′(z)∆x=0 ⇔ ∂u(x, y)
∂x+ i
∂v(x, y)
∂x= −i∂u(x, y)
∂y+∂v(x, y)
∂y. (1.5)
Con ello hemos encontrado las condiciones necesarias para que una funcion compleja sea analıtica, valedecir: Las condiciones de Cauchy Riemann
∂u(x, y)
∂x=∂v(x, y)
∂y∧ ∂v(x, y)
∂x= −∂u(x, y)
∂y. (1.6)
Ahora tendremos un criterio mas expedito para determinar que una funcion, como: f(z) = 2x+ iy no esanalıtica.
u(x, y) = 2xv(x, y) = y
}⇒ ∂u(x, y)
∂x= 2 6= 1 =
∂v(x, y)
∂y∧ ∂v(x, y)
∂x= 0 = 0 = −∂u(x, y)
∂y
Para el caso f(z) = x2 − y2 + 2ixy se cumplen las condiciones de Cauchy-Riemann
u(x, y) = x2 − y2
v(x, y) = 2xy
}⇒ ∂u(x, y)
∂x= 2x =
∂v(x, y)
∂y∧ ∂v(x, y)
∂x= 2y = −∂u(x, y)
∂y.
pero como esas condiciones son necesarias porque para encontrarlas hemos seleccionado un par de rutasmuy especıficas: ∆y = 0; ∆x → 0 y ∆x = 0; ∆y → 0, se requiere exigir algunas condiciones adicionales.Sin demostracion (puede consultar para detalles y demostraciones las referencias indicadas) exigiremos comocondicion necesaria y suficiente para que una funcion sea analıtica que las cuatro derivadas parciales parau(x, y) y v(x, y), existan, sean continuas en la region S y que se cumplan las condiciones de Cauchy-Riemann.El punto crucial (adicional) es que las derivadas sean continuas.
13

Borra
dor Pre
limin
ar
1.1. FUNCIONES DE VARIABLE COMPLEJA
1.1.5. Curiosidades de Cauchy-Riemann
Las funciones analıticas satisfacen algunas propiedades adicionales consecuencias de las condiciones deCauchy-Riemann.
La primera es que dada una funcion compleja generica f(z) = u(x, y) + iv(x, y), si f(z) es analıtica,u(x, y) y v(x, y) seran funciones armonicas conjugadas:
∇2u(x, y) = ∇2v(x, y) = 0 ,
es decir, satisfacen la ecuacion de Laplace. Si derivamos apropiadamente las ecuaciones (1.6) respecto a unay otra variable encontramos que
∂
∂x
[∂u(x, y)
∂x
]=
∂
∂x
[∂v(x, y)
∂y
]=
∂
∂y
[∂v(x, y)
∂x
]= − ∂
∂y
[∂u(x, y)
∂y
]⇒ ∂2u(x, y)
∂x2+∂2u(x, y)
∂y2= 0 ,
y equivalentemente
∂
∂x
[∂v(x, y)
∂x
]= − ∂
∂x
[∂u(x, y)
∂y
]= − ∂
∂y
[∂u(x, y)
∂x
]= − ∂
∂y
[∂v(x, y)
∂y
]⇒ ∂2v(x, y)
∂x2+∂2v(x, y)
∂y2= 0 ,
por lo tanto, hemos demostrado que las partes reales e imaginarias de una funcion analıtica son necesa-riamente armonicas. La importancia de este resultado radica, en primer lugar, que no son arbitrarias lasfunciones u(x, y) y v(x, y) con las cuales construimos f(z). Ambas deben satisfacer la ecuacion de Laplace.
En segundo lugar u(x, y) y v(x, y) estan ligadas por las condiciones de Cauchy-Riemann, y esto implicaque al conocer una de las funciones armonicas conjugadas, siempre es posible encontrar (salvo una constantede integracion) la otra.
Para ilustrar lo anterior, supongamos la siguiente funcion armonica conjugada u(x, y) = 2x− x3 + 3xy2
correspondiente a la parte real de f(z). Es facil comprobar que es una funcion armonica, ahora construyamosla parte imaginaria v(x, y). Esto es
u(x, y) = 2x− x3 + 3xy2 ⇒ ∂u(x, y)
∂x=∂v(x, y)
∂y= 2− 3x2 + 3y2 ⇒ v(x, y) = 2y − 3x2y + y3 + φ(x) ,
entonces
∂v(x, y)
∂x= −6xy+
∂φ(x)
∂x= −6xy = −∂u(x, y)
∂y⇒ ∂φ(x)
∂x= 0⇒ φ(x) = C ⇒ v(x, y) = 2y−3x2y+y3+C .
La segunda curiosidad, consecuencia de las ecuaciones (1.6), es que para una funcion compleja genericaf(z) = u(x, y) + iv(x, y), en la cual ademas se cumple que u(x, y) = const y v(x, y) = const, entonces secumplira que: ∇u(x, y) · ∇v(x, y) = 0.
∇u(x, y)·∇v(x, y) =
[∂u(x, y)
∂xi +
∂u(x, y)
∂yj
]·[∂v(x, y)
∂xi +
∂v(x, y)
∂yj
]=∂u(x, y)
∂x
∂v(x, y)
∂x+∂u(x, y)
∂y
∂v(x, y)
∂y,
y por obra de las condiciones de Cauchy-Riemann es inmediato comprobar que se anulan
∇u(x, y) · ∇v(x, y) = −∂u(x, y)
∂x
∂u(x, y)
∂y+∂u(x, y)
∂y
∂u(x, y)
∂x= 0 .
Es decir, u(x, y) =const y v(x, y) =const, corresponden a trayectorias mutuamente ortogonales. Esta “cu-riosidad” nos permite construir sistemas de coordenadas alternativos en el plano complejo y, sobre todo
14

Borra
dor Pre
limin
ar
1.1. FUNCIONES DE VARIABLE COMPLEJA
saber como establecer su transformacion a otros planos complejos. Esto se representa en la Figura 1.2 y seraconsiderado en la seccion 1.2.3 de la pagina 25.
La tercera curiosidad es un resultado el cual, siendo una formalidad, nos indica que las funciones analıticasf(z) dependen de z y no de su conjugado z∗. O dicho de otra manera: z y z∗ son variables independientes.Para demostrar esto procedemos primero a convencernos que si f(z) = u(x, y) + iv(x, y) y f(z) analıtica,
entonces ∂f(z)∂z∗ = 0. Sin detenernos a pensar en el significado de la derivada respecto a la variable conjugada,
recordamos que operacionalmente
x =z + z∗
2
y =z − z∗
2i
⇒ ∂f(z)
∂z∗=∂f(z)
∂x
∂x
∂z∗+∂f(z)
∂y
∂y
∂z∗=
1
2
[∂u(x, y)
∂x+ i
∂v(x, y)
∂x
]− 1
2i
[∂u(x, y)
∂y+ i
∂v(x, y)
∂y
],
arreglando terminos tendremos que es inmediato comprobar que se anula si se cumplen las condiciones (1.6)
∂f(z)
∂z∗=
1
2
[∂u(x, y)
∂x− ∂v(x, y)
∂y
]+i
2
[∂u(x, y)
∂y+∂v(x, y)
∂x
]= 0 ⇒ f(z) 6⇔ f(x, y) = f
(z + z∗
2,z − z∗
2i
),
en otras palabras, la funciones analıticas son verdaderas funciones de variable complejas y no, como pudieraparecer, de dos variables reales interpuestas.
1.1.6. Ejemplos
1. Sea f(z) = x2 − y2 + 2ixy
f ′(z) = lım∆z→0
f(z + ∆z)− f(z)
∆z= lım
∆x,∆y→0
(x+ ∆x)2 − (y + ∆y)2 + 2i(x+ ∆x)(y + ∆y)− x2 + y2 − 2ixy
∆x+ i∆y
se puede probar que independientemente de la ruta en el plano complejo (∆y = 0 ; ∆x→ 0 o viceversa)resulta:
f ′(z) = lım∆x,∆y→0
(2x+ i2y +
(∆x)2 − (∆y)2 + 2i∆x∆y
∆x+ i∆y
)= 2x+ i2y ,
que es mas o menos obvio si hubieramos notado que f(z) = x2 − y2 + 2ixy = (x + iy)2 ≡ z2, con locual
f ′(z) = lım∆z→0
(z + ∆z)2 − z2
∆z= lım
∆z→0
2z∆z + (∆z)2
∆z= lım
∆z→0(2z + ∆z) = 2z .
2. Ahora bien, las cosas no siempre son ası. Si consideramos f(z) = 2x+ iy es rapido comprobar que noes diferenciable en el plano complejo, ya que
f ′(z) = lım∆x,∆y→0
2x+ 2∆x+ i(y + ∆y)− 2x− iy∆x+ i∆y
= lım∆x,∆y→0
2∆x+ i∆y
∆x+ i∆y,
el cual, claramente no coincide si las direcciones de aproximacion a z0 = x0 + iy0 son distintas, valedecir, por ejemplo: ∆y = 0; ∆x→ 0 o ∆x = 0; ∆y → 0.
Como heredamos todas las ideas y metodos del campo real se cumplen todas las reglas de la derivacionpara funciones reales. Vale decir
d
dz(f(z)+g(z)) =
df(z)
dz+
dg(z)
dz;
d
dz(f(z)g(z)) =
df(z)
dzg(z)+f(z)
dg(z)
dz;
d
dz(f(g(z)) =
df(g)
dg
dg(z)
dz.
15

Borra
dor Pre
limin
ar
1.1. FUNCIONES DE VARIABLE COMPLEJA
3. Las potencias de enteros positivos: 1, z, z2, . . . son analıticos en todo el plano complejo, al igual quelos polinomios como:
f(z) = c0 + c1z + c2z2 + · · ·+ cnz
n ,
donde: c0, c1...cn son constantes complejas.
Para la funcion racional
f(z) =g(z)
h(z),
tenemos que f(z) sera analıtica si g(z) y h(z) son analıticas, salvo en los puntos donde h(z) = 0.
4. Dada la funcionf(z) = ex (cos(y) + isen(y))
podemos ver que:
∂u(x, y)
∂x= ex cos(y) ,
∂u(x, y)
∂y= −exsen(y) ,
∂v(x, y)
∂x= ex cos(y) ,
∂v(x, y)
∂y= exsen(y) ,
por lo que se cumplen las condiciones de Cauchy-Riemann, por lo tanto f(z) es analıtica para todo z.
5. Si tenemos una funcion f(z) analıtica en un dominio D, y si ademas |f(z)| = C constante en D,entonces f(z) es constante.
Como asumimos que |f(z)|2 = |u+ iv|2 = u2 + b2 = C2, entonces, derivando
u∂u
∂x+ v
∂v
∂x= 0 y u
∂u
∂y+ v
∂v
∂y= 0 .
Como ∂v∂x = −∂u∂y y ∂v
∂y = ∂u∂x , resulta:
u∂u
∂x− v ∂u
∂y= 0 y u
∂u
∂y− v ∂v
∂x= 0 .
que podemos convertir en: (u2 + v2
) ∂u∂x
= 0 y(u2 + v2
) ∂u∂y
= 0 .
Podemos ver que si C2 = u2 + b2 = 0 entonces u = v = f = 0. Si por el contrario C2 = u2 + b2 6= 0,entonces ∂u
∂x = ∂u∂y = 0 y por las condiciones de Cauchy-Riemann tambien se tiene que ∂u
∂x = ∂v∂y = 0, es
decir, u y v son constantes, por lo que f es constante.
6. Si utilizamos la forma polar para z = r (cos(θ) + isen(θ)) entonces f(z) = u(r, θ) + iv(r, θ) y lascondiciones de Cauchy-Riemann quedan de la forma
∂u
∂r=
1
r
∂v
∂θy
∂v
∂r= −1
r
∂u
∂θ.
16

Borra
dor Pre
limin
ar
1.1. FUNCIONES DE VARIABLE COMPLEJA
1.1.7. Practicando con Maxima
El programa de manipulacion simbolica Maxima esta disenado para realizar una gran cantidad decalculos algebraicos y numericos. Es indispensable ir al apendice 12.1 para familiarizarnos con la sintaxisbasica del programa.
Maxima es una potente calculadora y maneja numeros de diferentes tipos: enteros, racionales, irracio-nales, complejos y numeros con decimales (punto flotante). El numero complejo i =
√−1 se introduce como
%i.
( % i1) %iˆ2;
−1 ( % o1)
( % i2) (x + %i*y)*(u - %i*v);
(u− iv) (iy + x) ( % o2)
( % i3) expand( %);
vy + iuy − ivx+ ux ( % o3)
( % i4) gfactor( %);
(v + iu) (y − ix) ( % o4)
( % i5) rectform(exp(1 + %i));
ei sin (1) + e cos (1) ( % o5)
( % i6) gfactor( %);
ei (sin (1)− i cos (1)) ( % o6)
En variable compleja la funcion logaritmo se define en el intervalo (π, -π] (El logaritmo principal)
( % i7) rectform(log(1 + %i));
log (2)
2+iπ
4( % o7)
El valor absoluto
( % i8) cabs(x + %i*y); √y2 + x2 ( % o8)
La forma polar de
( % i9) polarform(x + %i*y); √y2 + x2 ei atan2(y,x) ( % o9)
17

Borra
dor Pre
limin
ar
1.1. FUNCIONES DE VARIABLE COMPLEJA
( % i10) exponentialize(cos(1 + %i));
ei(i+1) + e−i(i+1)
2( % o10)
( % i11) demoivre(exp(x + %i*y));
ex (i sin (y) + cos (y)) ( % o11)
( % i12) f(z):=z*exp(1/z);
f(z) := z exp
(1
z
)( % o12)
( % i14) realpart(f(z)); imagpart(f(z));
z e1z ( % o13)
0 ( % o14)
( % i16) u:realpart(f(x + %i*y)); v:imagpart(f(x + %i*y));
y ex
y2+x2 sin
(y
y2 + x2
)+ x e
xy2+x2 cos
(y
y2 + x2
)(u)
y ex
y2+x2 cos
(y
y2 + x2
)− x e
xy2+x2 sin
(y
y2 + x2
)(v)
( % i17) ’diff(f(z),z)=diff(f(z),z) ;
d
dz
(z e
1z
)= e
1z − e
1z
z( % o17)
Las condiciones Cauchy-Riemann
( % i18) diff(u,x) - diff(v,y)=0, ratsimp;
0 = 0 ( % o18)
( % i19) diff(v,x) + diff(u,y)=0, ratsimp;
0 = 0 ( % o19)
Dada la siguiente funcion
( % i20) u:(xˆ2 - yˆ2)/(xˆ2 + yˆ2)ˆ2;
x2 − y2
(y2 + x2)2 (u)
18
Borra
dor Pre
limin
ar
1.1. FUNCIONES DE VARIABLE COMPLEJA
Revisemos para ver si es armonica
( % i21) u xx: diff (u,x,2),factor;
6(y2 − 2xy − x2
) (y2 + 2xy − x2
)(y2 + x2)
4 (u xx)
( % i22) u yy: diff (u,y,2),factor;
−6(y2 − 2xy − x2
) (y2 + 2xy − x2
)(y2 + x2)
4 (u yy)
( % i23) u xx + u yy;
0 ( % o23)
Por lo tanto podemos proceder a encontrar la funcion v(x, y)
( % i24) u x: diff(u,x),factor;
2x(3y2 − x2
)(y2 + x2)
3 (u x)
( % i25) u y:diff(u,y),factor;
2y(y2 − 3x2
)(y2 + x2)
3 (u y)
( % i26) Int:integrate(u x,y)$( % i27) φ: -integrate(u y,x) - integrate(diff(Int,x),x), factor;
0 (φ)
( % i28) v: integrate(u x,y) + φ, factor;
− 2xy
(y2 + x2)2 (v)
Revisamos que satisface las condiciones de Cauchy-Riemann
( % i29) diff(u,x) - diff(v,y), factor;
0 ( % o29)
( % i30) diff(v,x) + diff(u,y), factor;
0 ( % o30)
( % i31) kill(all)$
19

Borra
dor Pre
limin
ar
1.1. FUNCIONES DE VARIABLE COMPLEJA
1.1.8. Ejercicios
1. Investigar los dominios del plano complejo para los cuales las funciones f(z) = |x|− i|y| y f(z) = |z|2 =zz∗ son analıticas.
2. Determine la funcion f(z) analıtica cuya parte imaginaria es [y cos(y) + xsen(z)]ex
3. Muestre que si f(z) es analıtica entonces f∗(z∗) tambien lo es.
4. Encuentre las derivadas
a) (z − i)/(z + i) en i
b) (z − 4i)8 en 3 + 4i
c) (1,5z + 2i)/(3iz − 4) para todo z.
d) i(1− z)n en 0
e) (iz3 + 3z2)3 en 2i
f ) z3/(z + i)3 en i
Cuales de las siguientes funciones son analıticas
a) f(z) = izz∗
b) f(z) = e−2x (cos(2y)− isen(2y))
c) f(z) = ex (cos(y)− isen(y))
d) f(z) = Re(z2)− i Im
(z2)
e) f(z) = 1/(z − z5
)f ) f(z) = ln |z|+ i Arg(z)
g) f(z) = cos(x) cosh(y)− i sen(x)senh(y)
5. Cuales de las siguientes funciones son armonicas y encuentre la funcion analıtica correspondiente si esel caso.
a) u = x2 + y2
b) u = sen(x) cosh(y)
c) v = exsen(2y)
d) v = x/(x2 + y2
)6. Para que valores de a y b las siguientes funciones son armonicas. Encuentre la conjugada
a) u = eπx cos(av)
b) u = cos(ax) cosh(2y)
c) u = cosh(ax) cos(y)
d) u = ax3 + bxy
7. Escriba un programa para graficar lineas equipotenciales u = constante de una funcion armonica y desu conjugada v en los mismos ejes. Aplique el programa a las siguientes funciones:
a) u = x2 − y2 y v = 2xy
b) u = x3 − 3xy2 y v = 3x2y − y3
c) u = ex cos(y) y v = exsen(y)
20

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
1.2. Puntos, lıneas de corte y ceros de funciones complejas
Hemos mencionamos anteriormente, que los numeros complejos se representan por su forma polar en dosejes coordenados. Ese diagrama bidimensional lo llamamos Diagrama de Argand. Como en el caso del analisisde funciones reales, existen funciones multivaluadas, a las cuales les debemos imponer ciertas condicionespara convertirlas en univaluadas; si una funcion es multivaluada, automaticamente deja de ser analıtica. Elobjetivo de esta seccion es identificar ese conjunto de condiciones para detectar en cual region del planocomplejo una determinada funcion es univaluada.
Recordemos que una funcion sera univaluada si para cada punto z del plano complejo existe uno y soloun punto imagen w en el plano complejo de llegada. El mapeo de dira que es uniforme o univaluado. Si porle contrario, para cada valor de la variable z existen mas de un valor de la variable w se dira que el mapeoes multivaluado. Tal vez el ejemplo mas sobresaliente de funciones multivaluadas es la funcion logaritmo.
Tambien debemos tener en cuenta la topologıa del plano complejo, aunque es similar a R2 existen dife-rencias. Si z = x+ iy ∈ C entonces su modulo |z| =
√x2 + y2 coincide con el modulo de un vector del plano
complejo. Por lo tanto, si un punto z0 ∈ C es dado y r > 0, se puede definir una bola abierta centrada en z0
y radio r como el conjuntoBa(z0, r) = {z ∈ C : |z − z0| < r} ,
y una bola cerrada al conjuntoBc(z0, r) = {z ∈ C : |z − z0| 6 r} .
Esto en equivalencia a los intervalos cerrados y abiertos en R.Para los numeros complejos tambien disponemos de una forma para indicar el infinito, es decir, numeros
complejos con modulo arbitrariamente grande. Esto es el equivalente al ±∞ de la recta real, pero requiereun poco mas de esfuerzo su visualizacion. Para hacer esta identificacion se recurre a la definicion de unaproyeccion estereogafica entre el plano complejo y la Esfera de Riemann.
La Esfera de Riemann se define
S2 = (x1, x2, x3) ∈ R3 : x21 + x2
1 + x23 = 1 ,
Con N = (0, 0, 1) su polo norte y S = (0, 0,−1) su polo sur.Denominaremos a C∞ ≡ C ∪ {∞} el plano complejo ampliado y definiremos la siguiente aplicacion
estereografica:
P : C∞ → S2 ⇒
P(x+ iy) = (x1, x2, x3) 6= (0, 0, 1) con x+ iy ∈ C
P(∞) = (0, 0, 1)
Tenemos entonces una recta de R3 que corta a la esfera S2 y pasa por los puntos (0, 0, 1) y (x, y, 0), identi-ficando el infinito del plano complejo con el polo norte de la esfera de esfera de Riemann. Esto significa queuna bola abierta centrada en ∞ es
Ba(∞, r) = {z ∈ C : |z| > r} .
1.2.1. Puntos y lıneas de corte
Consideremos la funcion f(z) = z1/2 y estudiemos los cambios que pueden ocurrir en w cuando la variablez cambia por diferentes trayectorias, por ejemplo, siguiendo distintos circuitos cerrados 0 ≤ θ < 2π a travesdel “vector” z.
f(z) = z1/2 ≡ r1/2eiθ/2 → f(z) = r1/2eiθ/2 → r1/2ei(θ+2π)/2 = −r1/2eiθ/2 .
21

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
Visto ası nos tendremos que preguntar ahora cual fue el circuito que recorrimos con z, y dependiendo deese circuito identificaremos algunos puntos con caracterısticas distintas. Si el circuito cerrado descrito por zno contiene el punto z = 0, la funcion f(z) = z1/2 retoma su valor original (ver figura 1.1 cuadrante superiorizquierdo contorno C1). Pero sı, como se aprecia en la misma figura 1.1, el circuito cerrado C2 si contieneel punto z = 0 entonces la funcion no retoma su valor original, f(z) → −f(z). Tambien es claro que si elcircuito cerrado lo recorremos dos veces θ → 4π entonces f(z) = z1/2 retoma su valor inicial.
Podemos ver la segunda situacion con mas detalle: la del camino C2, que podemos considerar como elcırculo reiθ centrado en z = 0
Consideremos que originalmente un punto sobre el cırculo es z1. Es decir que
f(z1) = w1 = r1/2eiθ1/2 .
Si completamos un cırculo completo, en sentido antihorario, para volver al mismo punto z1 le quehemos hecho es un cambio en el argumento θ1 → θ1 + 2π. Por lo tanto
f(z1) = w2 = r1/2ei(θ1+2π)/2 = w1eiπ = −w1 .
Si hacemos dos recorridos completos para volver a z1, es decir, θ1 → θ1 + 4π resulta que
f(z1) = w3 = r1/2ei(θ1+4π)/2 = w1ei2π = w1 .
y recuperamos el valor inicial.
Hemos notado el hecho de obtener diferentes valores para w. Cada uno de estos casos conforma unarama de la funcion, es decir, cada rama de una funcion multivaluada es una funcion univaluada. En nuestroejemplo:
w = f(z) = z1/2 ⇒
w1 = f1(z) = r1/2eiθ/2 0 6 θ < 2π
w2 = f2(z) = r1/2eiθ/2 2π 6 θ < 4π
En terminos generales, si existe un punto z0 que admite un entorno reducido y este se encuentra contenidoen el dominio de la funcion, y si ademas existe una curva simple y cerrada C que pueda contener un entornoreducido (arbitrariamente pequeno) de z0, entonces se dice que z0 es un punto de ramificacion de la funcionsi al dar una vuelta sobre C alrededor de z0 se produce un cambio de rama de la funcion. Si a medida que sedan n vueltas alrededor de z0 llevan a cada rama sobre sı misma, se dice que z0 es un punto de ramificacionde orden n− 1. Esto significa que para la funcion f(z) = z1/2, el punto z0 = 0 es un punto de ramificacionde orden 1.
Los puntos alrededor de los cuales se construye un circuito cerrado en el diagrama de Argand y la funcionno retoma su valor inicial se denominan puntos de corte y las lıneas de corte, corte ramal (o simplementecortes) seran aquellas lıneas que separan regiones en las cuales una determinada funcion es univaluada. Esclaro que los puntos de corte son puntos singulares, en los cuales la funcion deja de ser analıtica y existiransi θ toma, valores 0 ≤ θ ≤ 2nπ. Es decir, puede dar n vueltas.
Estas lineas conectan dos y solo dos puntos de ramificacion. En el caso de nuestra funcion f(z) = z1/2, lalınea de corte sera cualquiera que comience en z = 0 y continue para |z| → ∞. Por simplicidad es costumbretomar las lıneas de corte a lo largo de los ejes reales o complejos. De este modo aparece ilustrado en la figura1.1 cuadrante superior derecho la lınea de corte que sigue el eje positivo de las x.
La situacion se torna mas interesante cuando estas definiciones se analizan a la luz de funciones con masde un punto de corte.
22

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
Figura 1.1: Los distintos contornos que identifican los puntos de corte
Consideremos la funcion
f(z) =√z2 + 1 ⇒ f(z) =
√(z − i)(z + i) ≡
√(r1eiθ1) (r2eiθ2) =
√r1r2e
iθ1/2eiθ2/2 =√r1r2e
i(θ1+θ2)/2 .
Analicemos entonces, varios contornos en el plano de Argand. Otra vez, la figura 1.1 ilustra en el cuadranteinferior los distintos contornos C1, C2, C3 y C4.
Tal y como se aprecia en esa figura, se dan cuatro casos:
1. Contorno C1 no incluye ningun punto de corte, entonces: θ1min ≤ θ1 ≤ θ1max y θ2min ≤ θ2 ≤ θ2max,con lo cual f(z) retoma su valor inicial luego de recorrer el C1.
2. Contorno C2 incluye z = i como punto de corte, entonces: 0 ≤ θ1 ≤ 2nπ y θ2min ≤ θ2 ≤ θ2max, por locual f(z)→ −f(z).
3. Contorno C3 incluye z = −i como punto de corte, entonces: θ1min ≤ θ1 ≤ θ1max y 0 ≤ θ2 ≤ 2nπ, porlo cual f(z)→ −f(z).
4. Contorno C4 incluye ambos como punto de corte,z = i y z = −i, entonces: 0 ≤ θ1 ≤ 2nπ y 0 ≤ θ2 ≤ 2nπ,por lo cual f(z)→ f(z) retoma su valor.
De este modo para construir los cortes que impidan que nuestra funcion sea multivaluada podremosseleccionar:
zcorte > i y zcorte < −i , o − i < zcorte < i .
1.2.2. Singularidades, polos y ceros de funciones complejas
Un punto donde la funcion f(z) no es analıtica se denomina un punto singular. Estos puntos pueden ser:
23

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
Singularidades aisladas: sı una funcion es analıtica en todo el entorno de un punto z0, excepto enel propio punto z0, entonces se dice que el punto z0 es una singularidad aislada o un punto singular dela funcion f(z).
Por ejemplo, para la funcion f(z) = 1/z, sabemos que es analıtica en todo punto excepto en z = 0.La unica singularidad de la funcion esta en el punto z = 0 y este punto es entonces una singularidadaislada.
Singularidades no aisladas: Si una funcion contiene un conjunto de singularidades aisladas enuna vecindad de un punto z0, entonces se dice que z0 es una singularidad no aislada. Es decir, unasingularidad no aislada de una funcion es un punto lımite del conjunto de sus singularidades.
Clasificacion de las singularidades aisladas
1. Un punto singular aislado z0 de una funcion f se denomina removible o evitable si:
lımz→z0
f(z) ∃ .
Observemos que:
a) la funcion f puede no estar definida en z0 y por esta razon la funcion no es analıtica en z0.
b) la funcion puede estar definida en z0 pero de valor diferente al lımz→z0 f(z). Con lo cual la funcionno es continua en z0 y por lo tanto no es analıtica en z0.
c) la funcion puede estar definida en z0 y su valor igual al del lımz→z0 f(z). En este caso la funcionno es singular en z0.
Por lo tanto, si f tiene una singularidad removible en z0 entonces una de las posibilidades (a) o (b)debe ser la causa de que la funcion no sea analıtica o regular en z0.
Si una funcion g es igual a f en todos los puntos, excepto en z0, y
g(z0) = lımz→z0
f(z) ,
entonces g no es singular en z0, esto significa que la singularidad de f puede ser removida mediante laredefinicion de la funcion f en z0.
2. Un punto singular aislado z0 de una funcion f que no esta definida en z0 se llama un polo de orden nde f si:
lımz→z0
(z − z0)nf(z) = M 6= 0 ,
donde n es un numero entero positivo. Un polo de orden 1 se denomina un polo simple.
3. Un punto singular aislado de una funcion f recibe el nombre de singularidad esencial de f si
lımz→z0
(z − z0)nf(z) @ ,
para ningun entero positivo de n.
Las singularidades removibles se caracterizan porque el valor de f(z)→ 0/0 cuando z → z0. El caso masemblematico es la funcion
f(z) =sen(z)
z⇒ f(z) =
1
z
(z − z3
3!+z5
5!· · ·)
=
(1− z2
3!+z4
5!· · ·)⇒ lım
z→0f(z) = 1
24

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
con lo cual, luego de desarrollar por Taylor la funcion sen(z), se ha removido la singularidad aparente.El comportamiento de una funcion compleja en infinito (o cuando tiende a infinito), vale decir, cuando
z →∞ no esta tan bien definida como en los casos de funciones de variable real. Es claro como una cantidadreal, digamos |f(z)| o |z| tiende a infinito, pero z es una cantidad “bidimensional” y, en principio, existirıanvarias formas de tender a infinito. Para precisar el comportamiento de una funcion compleja de variablecompleja en infinito, hacemos un cambio de variable z = 1/ξ y estudiamos f(1/ξ) con 1/ξ →∞.
De esta manera:
1.
lımz→∞
z(1 + z2) ≡ lımξ→0
1
ξ+
1
ξ3, con lo cual tendra un polo de orden 3.
2.
lımz→∞
ez ≡ lımξ→0
∞∑n=0
1
n! ξny presenta una singularidad esencial para z →∞ .
Los ceros de una funcion compleja (f(z0) = 0, entonces llamaremos z0 un cero de f(z)) se clasifican aligual que los polos. Esto es
f(z) = (z − z0)ng(z) con n entero positivo y g(z) 6= 0 ∀ z .
1.2.3. Transformaciones conformes
Nos interesara ahora considerar transformaciones entre planos complejos, esto es:
z = x+ iy ↔ w = r + is ⇒ w = g(z) = r(x, y) + is(x, y) ↔ z = h(w) = x(r, s) + iy(r, s)
Es decir, transformaciones entre puntos (x, y) ↔ (r, s) correspondientes a dos diagramas de Argand, detal modo que existe la funcion inversa z = h(g(z)) con w = g(z) y z = h(w) funciones analıticas, salvo en unnumero finito de polos aislados. Entonces denominaremos a este tipo de transformaciones transformacionesconformes si ademas, en todo punto z y w (excepto en aquellos en los cuales g′(z) y por lo tanto h′(w) soncero o infinita) cumple con:
Curvas continuas en el plano z transforman en curvas continuas en el w.
Los angulos entre dos curvas cualesquiera que se intercepten en el plano z seran los mismos que los queformen las curvas transformadas en el plano w. Esto es, los angulos entre las curvas seran invariantesbajo la transformacion.2
El cambio de escala en la vecindad de puntos transformados es independiente de la direccion en la cualse mida.
Cualquier funcion analıtica en z = x+ iy transforma en otra funcion w = r + is tambien analıtica.
La segunda de las afirmaciones es inmediata a partir de la primera. Es decir, si una transformacionconforme de coordenadas tienen inversa y ambas son analıticas, es obvio que curvas contıunas C(z) serantransformadas a curvas continuas C(w).
El hecho que la transformacion conforme preserva el angulo y las escalas se muestra en la figura 1.3y puede comprobarse de la siguiente manera. Considere dos curvas, C1(z) y C2(z), en el plano complejo
2De esta propiedad es donde la transformacion hereda su nombre de conforme. Son transformaciones isogonales es decir, quepreservan los angulos entre las curvas que se interceptan.
25

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
Figura 1.2: Tranformaciones conformes. Tomado de Eric W. Weisstein. Conformal Mapping. MathWorld–A Wolfram Web Resource. http://mathworld.wolfram.com/ConformalMapping.html
z = x + iy. Supongamos ademas que estas curvas se interceptan en un punto z = z0. Entonces, sobre lastangentes a cada curva, en z0, definimos otros dos puntos z1 y z2 de tal forma que
z1 − z0 = ρeiθ1
z2 − z0 = ρeiθ2
⇒
w1 − w0 = ρ1eiφ1
w2 − w0 = ρ2eiφ2
Notese que hemos construido los puntos z1 y z2 sobre las tangentes a z0 a la misma distancia ρ de z0
y, en principio, hemos supuesto que las distancias a los puntos transformados w1 y w2 (las cuales hemosidentificado como ρ1 y ρ2, respectivamente), no son iguales. Ahora bien, dado que w = g(z) es analıticaentonces
dg(z)
dz
∣∣∣∣z=z0
=dw
dz
∣∣∣∣z=z0
= lımz1→z0
w1 − w0
z1 − z0= lımz2→z0
w2 − w0
z2 − z0⇒ g′(z0) = lım
ρ→0
ρ1
ρei(φ1−θ1) = lım
ρ→0
ρ2
ρei(φ2−θ2) .
Es claro que al comparar las magnitudes y las fases demostramos que las transformaciones conformespreservan las distancias, ρ1 = ρ2, y los angulos (φ2−φ1) = (θ2−θ1). Adicionalmente, es muy facil convencerseque si la transformacion conforme conserva los angulos entre curvas y las escalas en todas direcciones lasfiguras son transformadas en figuras equivalentes, quiza ampliadas y rotadas, pero no deformadas.
1.2.4. Algunas consecuencias y ejemplos
Las consecuencias de la ultima afirmacion reviste alguna importancia. Si f = f(z) es analıtica en el planox − y y la transformacion z = h(w) tambien lo es, entonces la funcion F (w) = f(h(w)) necesariamente esanalıtica en el plano (r, s).
∆F
∆w=
∆f
∆h
∆h
∆w≡ ∆f
∆z
∆h
∆w.
26

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
Figura 1.3: Tranformaciones conformes. Cuadrante superior representa las conservacion de angulos y escalabajo transformaciones y el inferior un ejemplo de transformaciones conforme para w = z2.
Por hipotesis supusimos que f y h eran analıticas, por lo cual es inmediato concluir que debido a que losdos factores de la derecha son analıticos, la funcion F (w) tambien lo sera.
Tal y como mostramos en la seccion 1.1.5 si f(z) = u(x, y) + iv(x, y), es analıtica, entonces u(x, y) yv(x, y) seran funciones armonicas conjugadas, vale decir que satisfacen la ecuacion de Laplace, con lo cual∇2u(x, y) = ∇2v(x, y) = 0. Eso significa que si F = Φ(w) + iΨ(w), entonces:
f = φ+ iψ ⇒
∂2φ
∂x2+∂2φ
∂y2= 0
∂2ψ
∂x2+∂2ψ
∂y2= 0
⇔ F = Φ + iΨ ⇒
∂2Φ
∂x2+∂2Φ
∂y2= 0
∂2Ψ
∂x2+∂2Ψ
∂y2= 0
Esto impone que si <[f(z)] = φ es constante en el plano x − y, tambien lo sera <[F (w)] = Φ en r − s
(¡Demuestrelo!).Esta propiedad deriva una serie de aplicaciones en la solucion de la ecuacion de Laplace en dos dimen-
siones. Si bien es una tecnica elegante y util cuando es posible, no deja de ser limitada porque se restringea 2D. Hoy los metodos numericos para resolver ecuaciones diferenciales en derivadas parciales ha superadocon creces este tipo de tecnicas. Los ejemplos son variados.
Las siguientes transformaciones representan:
traslaciones: w = z + b ; rotaciones de angulo θ: w = zeiθ ; expansiones de escala a : w = az ,
y pueden ser combinadas como: w = az+b con a y b numeros complejos. Para la traslacion es inmediato.Para la rotacion tambien si recordamos que z = |z|eiφ con lo cual w = |z|eiφeiθ = |z|ei(φ+θ).
27

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
Figura 1.4: Transformaciones conformes para el ejemplo donde w =z − iz + i
.
Tambien la transformacion de inversion w = 1/z que transforma los puntos del interior de un cırculo
unidad a su exterior y viceversa. Una vez mas, w =1
z=
1
|z|eiφ=
∣∣∣∣1z∣∣∣∣ e−iφ. Entonces es claro que
0 ≤ |z| ≤ 1 ⇒ ∞ < |w| ≤ 1 ∧ 1 ≤ |z| ≤ ∞ ⇒ 0 < |w| ≤ 1 .
Un caso mas interesante lo constituye la transformacion w = eiθ(z − z0
z − z∗0
), la cual transforma los
puntos z0 del semiplano superior complejo y > 0 al interior de un cırculo unidad en el w−plano (verfigura 1.4. Para convencernos de ello notamos que
|w| =∣∣∣∣eiθ ( z − z0
z − z∗0
)∣∣∣∣ =
∣∣∣∣ z − z0
z − z∗0
∣∣∣∣ .En general si z0 y z los consideramos en el semiplano complejo superior y ≥ 0, entonces siempre secumple que |z − z0| ≤ |z − z∗0 | con lo cual |w| ≤ 1, y como se cumple para todo z en ese semiplano,entonces cada uno de esos puntos es transformado dentro de un cırculo de radio |w|. Es inmediatoconvencerse que, la igualdad se cumple para puntos z sobre el eje real y que el punto z = z0 es llevadoal punto w = 0.
Finalmente, notamos que si conocemos como transforman dos puntos z1 → w1 y z2 → w2 entoncespodremos determinar la transformacion, esto es, conocer los valores de los parametros z0 y φ. Estecaso lo podemos apreciar si consideramos un par de puntos en el semiplano complejo y conocemoscomo transforman, digamos z = i sobre el eje imaginario, e imponemos que sea transformado a w = 0,entonces es inmediato determinar que z0 = i. Por otro lado, si imponemos que z = ∞ ⇒ w = 1,
entonces: 1 = w = eiθ ⇒ θ = 0, con lo cual w =z − iz + i
.
1.2.5. Ejemplos
1. Consideremos la funcion
f(z) =3z2 + 2z
(z − 4)(z − i),
la funcion es analıtica en todos los puntos, excepto en z = 4 y z = i. Entonces, las unicas singularidadesestan en los puntos z = 4 y z = i, y como son un conjunto finito de singularidades cada una de estasson singularidades aisladas.
28

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
2. Sea f la funcion:
f(z) =
(sen
[x
|z|2
]cosh
[y
|z|2
]− i cos
[x
|z|2
]senh
[y
|z|2
])−1
,
Si denotamos al denominador como g(z), entonces
g(z) = sen
[x
x2 + y2
]cosh
[y
x2 + y2
]− i cos
[x
x2 + y2
]senh
[y
x2 + y2
]= u(x, y) + iv(x, y) 6= 0 ,
Es claro que z 6= 0. Por otra parte, de las condiciones de Cauchy-Riemann se tiene:
∂u
∂x=
y2 − x2
(x2 + y2)2 cos
[x
x2 + y2
]cosh
[y
x2 + y2
]− 2xy
(x2 + y2)2 sen
[x
x2 + y2
]senh
[y
x2 + y2
]=∂v
∂y
∂u
∂y= − 2xy
(x2 + y2)2 cos
[x
x2 + y2
]cosh
[y
x2 + y2
]+
x2 − y2
(x2 + y2)2 sen
[x
x2 + y2
]senh
[y
x2 + y2
]= −∂v
∂x
Las condiciones de Cauchy-Riemann se satisfacen en todas partes salvo en z = 0, donde ni g ni lasderivadas parciales estan definidas. Como las derivadas parciales son continuas, entonces g es analıticaen todos los puntos excepto z = 0. Por lo tanto, f es analıtica salvo en z = 0.
Por otra parte, g = 0 si su parte real como su parte imaginaria son nulas, ası que las singularidades def , ademas de z = 0, vienen dadas por el siguiente sistema ecuaciones:
sen
[x
x2 + y2
]cosh
[y
x2 + y2
]= 0 y cos
[x
x2 + y2
]senh
[y
x2 + y2
]= 0
Como cosh(α) > 0, la primera ecuacion se satisface si
sen
[x
x2 + y2
]= 0 ⇒ x
x2 + y2= ± nπ ,
puesto que cos(α) 6= 0 cuando senh(α) = 0, entonces la segunda ecuacion se satisface si y = 0. Por lotanto, el sistema se satisface simultaneamente si
x
x2 + y2= ± nπ
⇒ 1
x= ± nπ , n = 0, 1, 2, ...
y = 0
Las singularidades ocurren en el eje real y en los puntos donde x = ± 1/nπ. El punto lımite de esteconjunto, cuando n→∞, es el punto z = 0. Por lo tanto, f tiene una singularidad no aislada en z = 0y singularidades aisladas en los puntos z = ± 1/nπ, con n = 1, 2, 3, ....
3. Dada la funcion
f(z) =z2 + 16
z − 4i, z 6= 4i ,
esta funcion es el cociente de dos funciones enteras y por lo tanto es analıtica, salvo donde el denomi-nador se hace nulo, esto es en z = 4i. Por otra parte:
f(z) =(z + 4i)(z − 4i)
z − 4i= z + 4i ,
29

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
Figura 1.5: A la izquierda lineas |z| = constante, Arg(z) = constante y las respectivas imagenes en el planou− v. A la derecha, la grafica para x = constante, y = constante.
ylımz→4i
f(z) = lımz→4i
z + 4i = 8i.
la funcion f tiene una singularidad removible en z = 4i pues el lımite existe. Podemos definir unafuncion g igual a f , para z 6= 4i
g(z) =
z + 4i si z 6= 4i
8i si z = 4i
y queda claro que g es una funcion entera.
4. Para
f(z) =1
1− z− 1
1 + z=
2z
(1− z)(1 + z)
y es inmediato darse cuenta que tendremos polos de orden 1 en z = 1 y z = −1
5. Para
f(z) = tanh(z) =senh(z)
cosh(z)=ez − e−z
ez + e−z⇒ ez = ei(2n+1)πe−z es un polo
es decir donde ez = −e−z, con lo cual z0 =(n+ 1
2
)iπ y al utilizar la definicion:
lımz→(n+ 1
2 )iπ
[z −
(n+ 1
2
)iπ]
senh(z)
cosh(z)= lımz→(n+ 1
2 )iπ
[z −
(n+ 1
2
)iπ]
cosh(z) + senh(z)
senh(z)= 1
donde hemos utilizado el Teorema de L’Hopital y consecuentemente z0 =(n+ 1
2
)iπ es un polo simple.
6. Consideremos la aplicacion w = f(z) = z2.
En la forma polar tenemos: z = reiθ, w = ρeiψ y w = z2 = r2ei2θ. Por lo tanto, si comparamos losterminos podemos ver que: ρ = r2 y ψ = 2θ. Es decir, los cırculos r = r0 son mapeados a cırculosρ = r2
0 y las lıneas θ = θ0 en lıneas ψ = 2θ0. En la figura 1.5, a la izquierda, podemos ver el mapeow = z2 desde la region: 1 ≤ |z| ≤ 3/2 , π/6 ≤ θ ≤ π/3 a la region: 1 ≤ |w| ≤ 9/4 , π/3 ≤ θ ≤ 2π/3.
30
Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
En coordenadas cartesianas donde z = x+ iy tenemos
u = <(z2) = x2 − y2 y v = =(z2) = 2xy ,
Ahora las lineas x = C1 constante se mapean a u = C21 − y2 y v = 2C1y. Si eliminamos y resulta
v2 = 4C21 (C2
1 − u) ,
Esto es, parabolas que se abren a la izquierda. De manera similar para lıneas y = C2 constantes.
v2 = 4C22 (C2
2 + u) ,
parabolas que abren a la derecha. Ver la figura 1.5.
31

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
1.2.6. Practicando con Maxima
En en analisis complejo una de las dificultades que se presentan es a la hora de visualizar las funcionesy las diferentes aplicaciones sobre estas. Afortunadamente, una de las grandes ventajas de los sistemas demanipulacion simbolica (CAS) es su capacidad para la visualizacion.
Veamos el siguiente ejemplo donde a traves de un programa sencillo ubicamos en el plano complejo lasraıces de una ecuacion en variable compleja. Para las funciones que utilizaremos en bueno consular el manualdel programa: http://maxima.sourceforge.net/docs/manual/es/maxima.html.
Si necesitamos mas informacion sobre Maxima podemos consultar tambien: http://maxima.sourceforge.net/es/documentation.html.
Construiremos un programa que llamaremos “drawrootC( )” al que luego le debemos introducir la ecua-cion a resolver.
( % i1) drawrootC( f):=block( [Re,Im,s,raices,pl],s: solve( f=0,z),raices: factor(map(rhs,s)),Re:map(realpart,raices),Im:map(imagpart,raices),pl:[ ],pl:cons([points(Re,Im)] , pl),pl:cons([xrange=[-2,2]],pl),pl:cons([yrange=[-2,2]],pl),pl:cons([point size=4],pl),pl:cons([grid=on],pl),apply(wxdraw2d,pl), raices)$
Si queremos hallar las raıces de la ecuacion z5+1 = 0 ejecutamos nuestro programa de la manera siguiente
( % i2) drawrootC(zˆ5+1);
( % t2)
[−e 2iπ5 ,−e 4iπ
5 ,−e− 4iπ5 ,−e− 2iπ
5 ,−1] ( % o2)
32

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
Si queremos hacer un grafico de una curva que esta parametrizada, por ejemplo: x(t) = sen(t) y y(t) =2sen(t), escribimos la siguiente instruccion
( % i3) wxplot2d([parametric,sin(t),sin(2*t), [t,-2* %pi,2* %pi]],[nticks,100])$
( % t3)
El siguiente programa esta disenado para graficar una funcion f(z) utilizando cırculos concentricos,centrados en el origen, y en sentido antihorario3.
( % i4) wxdrawcircleC( f):=block([fx,fy,fxt,fyt,pl,j,ncirc,r,theta shift,lm,l,dx,dy,dxy,v,nt],ratprint:false,fx:realpart(rectform(subst(z=x+ %i*y, f))),fy:imagpart(rectform(subst(z=x+ %i*y, f))),pl:[], nt:200, r:2, ncirc:5, theta shift: %pi/20, lm:0,for n:1 thru ncirc do (l:cons(lm,makelist(cabs(subst(z=r*n/7*exp( %i*t), f)),t,0,2* %pi,.5)),lm:lmax(l)),for j:1 thru ncirc do(fxt:subst([x=r*cos(t)*j/ncirc,y=r*sin(t)*j/ncirc],fx),fyt:subst([x=r*cos(t)*j/ncirc,y=r*sin(t)*j/ncirc],fy),pl:cons([parametric(fxt,fyt,t,0,2* %pi)] , pl),pl:cons([color=j-1],pl), pl:cons([key=string(r*j/ncirc)],pl),dx:subst(t=3/nt,fxt)-subst(t=0,fxt),dy:subst(t=3/nt,fyt)-subst(t=0,fyt),dxy:sqrt(dxˆ2+dyˆ2),v:vector([subst(t=0,fxt),subst(t=0,fyt)],[lm*dx/dxy/20,lm*dy/dxy/20]),pl:cons([v],pl),pl:cons([head length=lm,head angle=1],pl),pl:cons([color=j-1],pl),pl:cons([key=],pl)),pl:cons([xlabel=,ylabel=],pl),pl:cons([nticks=200],pl),pl:cons([grid=on],pl),apply(wxdraw2d,pl) )$
3Este ejemplo otras aplicaciones puede consultar https://themaximalist.org/category/complex-variables/
33

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
Aquı podemos ver simplemente cırculos concentricos que aumentan con el radio pues estamos visualizandola funcion f = (z).
( % i5) wxdrawcircleC(z);
( % t5)
Para el siguiente ejemplo, f(z) = (z− π/2)(z− 1), podemos ver la aparicion de bucles cuando, a medidaque crece el radio, se incluye el punto z = 0.
( % i6) wxdrawcircleC((z- %pi/2)*(z-1));
( % t6)
34

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
Mientras que para la funcion f(z) = 1/((z − 3π/2)(z − 1)),
( % i7) wxdrawcircleC(1/((z-3* %pi/2)*(z-1)));
( % t7)
El siguiente programa, aunque limitado, permite obtener graficas para transformaciones conformes.
( % i8) drawgridC( f):=block( [fx,fy,fxt,fyt,pl,j,ngrid],fx:realpart(rectform(subst(z=x+ %i*y, f))),fy:imagpart(rectform(subst(z=x+ %i*y, f))),pl:[], ngrid:20,for j:0 thru ngrid do(fxt:subst([x=-1+j*2/ngrid,y=t],fx),fyt:subst([x=-1+j*2/ngrid,y=t],fy),pl:cons([parametric(fxt,fyt,t,-1,1)], pl)),pl:cons([color=blue],pl),for j:0 thru ngrid do(fxt:subst([y=-1+j*2/ngrid,x=t],fx),fyt:subst([y=-1+j*2/ngrid,x=t],fy),pl:cons([parametric(fxt,fyt,t,-1,1)] ,pl) ),pl:cons([color=red],pl),pl:cons([xlabel=,ylabel=”w=f(z)”],pl),pl:cons([nticks=200],pl),apply(wxdraw2d,pl) )$
35

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
( % i9) drawgridC(z);
( % t9)
( % i10) drawgridC(zˆ2);
( % t10)
36

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
( % i11) drawgridC(zˆ3-1);
( % t11)
( % i12) kill(all)$
1.2.7. Ejercicios
1. Determine el tipo de singularidades (en caso de poseerlas) de las siguientes funciones en: z = 0 y z =∞
a)
f(z) =1
z − 2
b)
f(z) =1 + z3
z2
c)
f(z) = senh
(1
z
)2. Identifique los ceros, polos y las singularidades esenciales de las siguientes funciones:
a)
f(z) =z − 2
z2sen
(1
1− z
)b)
f(z) = e1/z
c)
f(z) = tan
(1
z
)3. Encuentre el comportamiento en el infinito de
37

Borra
dor Pre
limin
ar
1.2. PUNTOS, LINEAS DE CORTE Y CEROS DE FUNCIONES COMPLEJAS
a)
f(z) = a+b
z2
b)f(z) = z(1 + z2)
c)f(z) = ez
4. Demostrar que la ecuacion de la proyeccion estereografica es
P(x+ iy) =
(2x
|z|2 + 1,
2y
|z|2 + 1,|z|2 − 1
|z|2 + 1
)con z = x+ iy ∈ C.
5. Demostrar que las ecuacion para la inversa de la proyeccion estereografica es la siguiente
P−1(x1, x2, x3) =x1 + x2i
x3 − 1si (x1, x2, x3) 6= (0, 0, 1).
6. Determine el angulo de rotacion en el punto z0 = 2 + i cuando w = z2, e ilustrelo para alguna curvaparticular. Demuestre que el factor de escala en ese punto es 2
√5.
7. Demuestre que bajo la transformacion w = 1/z, las imagenes de las lıneas y = x − 1 e y = 0 son elcırculo u2 + v2 − u − v = 0 y la lınea v = 0, respectivamente. Dibuje las cuatro curvas, determinelas direcciones correspondientes a lo largo de ellas y verifique la conformidad del mapeo en el puntoz0 = 1.
8. Demuestre que el angulo de rotacion en un punto distinto de cero z0 = r0eiθ0 bajo la transformacionw = zn para (n = 1, 2, ...), es (n − 1)θ0. Determine el factor de escala de la transformacion en esepunto.
9. Demuestre que la transformacion w = sen(z) es conforme en todos los puntos excepto en
z =π
2+ nπ (n = 0,±1,±2, ...)
10. Encuentre la transformacion inversa local de w = z2 en los puntos
(a) z0 = 2 ; (b) z0 = −2 ; (c) z0 = −i .
11. Dibuje o grafique la region dada y su imagen bajo las siguientes transformaciones
a) |z| ≤ 1/2, −π/8 < Arg(z) < π/8, w = z2.
b) 1 < |z| < 3, 0 < Arg(z) < π/2, w = z3.
c) 2 ≤ =(z) ≤ 5, w = z3.
d) |z − 1/2| ≤ 1/2, w = 1/z.
38

Borra
dor Pre
limin
ar
1.3. INTEGRALES COMPLEJAS
1.3. Integrales complejas
Como siempre, luego de definir la derivada, construimos el concepto de integral a partir de la suma deRiemann. Esto es
Sn =
n∑j=1
f(ζj)(zj − zj−1) si n→∞ ⇒ |zj − zj−1| → 0 ⇒ lımn→∞
n∑j=1
f(ζj)(zj − zj−1) =
∫ z2
z1
dz f(z) .
Es decir, que si el lımn→∞ Sn existe, entonces se corresponde con la definicion de la integral.
1.3.1. Algunas propiedades
Es claro que esta integral es, necesariamente, una integral de lınea, ya que z tiene “dos dimensiones”∫ z2
z1
dz f(z) =
∫ z2
z1
[dx+ idy] [u(x, y) + iv(x, y)]
=
∫ x2,y2
x1,y1
[u(x, y)dx− v(x, y)dy] + i
∫ x2,y2
x1,y1
[v(x, y)dx+ u(x, y)dy] , (1.7)
con lo cual transformamos una integral compleja en una suma de integrales reales. Pero necesitamos definirel contorno a traves del cual vamos del punto z1 = x1 + iy1 al punto z2 = x2 + iy2.
La integracion compleja tendra las propiedades ya conocidas∫C dz (f(z) + g(z)) =
∫C dz f(z) +
∫C dzg(z).∫
C dz Kf(z) = K∫C dz f(z) con K una constante real o compleja.∫ b
adz f(z) = −
∫ ab
dz f(z).∫ ba
dz f(z) =∫ma
dz f(z) +∫ bm
dz f(z).∫C dz |f(z)| ≤ML , donde M = max |f(z)| y L la longitud de C.
Esta ultima propiedad es importante porque permite establecer cotas a las integrales complejas sin tenerque evaluarlas. De la definicion de integral es casi inmediata la demostracion
lımn→∞
n∑j=1
f(ζj)∆zj =
∫ z2
z1
dz f(z) ⇒
∣∣∣∣∣∣n∑j=1
f(ζj)∆zj
∣∣∣∣∣∣ ≤n∑j=1
|f(ζj)| |∆zj | ≤Mn∑j=1
|∆zj | ≤ML .
Donde hemos utilizado que |f(ζj)| ≤M y que la suma de los intervalos ∆zj = zj−zj−1 es la longitud L delrecorrido C. Es claro que tomando lımites a ambos miembros obtendremos
∣∣∫C dz f(z)
∣∣ ≤ ∫C dz |f(z)| ≤ML.
1.3.2. Teorema integral de Cauchy
El teorema integral de Cauchy (tambien conocido como el teorema de Cauchy-Goursat) es uno de los dosteoremas basicos en la teorıa de funciones de variable compleja y tiene que ver con integrales de lınea paralas funciones holomorfas en el plano complejo. Basicamente dice que si dos caminos de integracion diferentesconectan los mismos dos puntos, y la funcion que se esta integrando es holomorfa en todas partes entre lasdos trayectorias, entonces las dos integrales de la funcion seran iguales.
39

Borra
dor Pre
limin
ar
1.3. INTEGRALES COMPLEJAS
Figura 1.6: Regiones en el plano complejo
1.3.3. El teorema y las regiones
Este teorema considera que si f(z) es holomorfa en una region simplemente conexa, R, en su contornoC y su derivada f ′(z) existe y es continua en esta region4, entonces la circulacion a lo largo de cualquiercontorno cerrado C se anula. Esto es: ∮
Cdz f(z) = 0 . (1.8)
Antes que nada, y como parte de ese adiestramiento en lenguaje, precisaremos que queremos decir (quequieren decir los matematicos) con regiones simplemente conexas y multiplemente conexas.
Una region simplemente conexa es aquella que no tiene “huecos”, o dicho de una manera mas precisay elegante, en la cual una curva Γ puede ser reducida (encogida) a un punto sin salir de la region R. Enla figura 1.6 cuadrante Ia se muestra una region simplemente conexa y en los cuadrantes Ib y Ic regionesmultiplemente conexas. Estas dos ultimas figuras clarifican este concepto. Es decir, una region multiplementeconexa es aquella que no es simplemente conexa y con eso queremos decir que “tiene huecos”, o lo que es lomismo existen curvas que no se pueden reducir a puntos en la region.
Tal y como hemos comentado la demostracion rigurosa del Teorema de Cauchy esta fuera de los alcancesde estas notas, pero algo se puede hacer si invocamos el Teorema de Stokes (o uno de los Teoremas de Greenen el plano) que vimos cuando estudiamos analisis vectorial. Con ello recordamos la ecuacion (1.7), entonces∫ z2
z1
dz f(z) =
∫ x2,y2
x1,y1
[u(x, y)dx− v(x, y)dy] + i
∫ x2,y2
x1,y1
[v(x, y)dx+ u(x, y)dy] .
4Esta ultima condicion no es necesaria, pero la demostracion del teorema se torna mucho mas sofisticada, y referimos allector a los libros especializados, vale decir a las referencias [James Brown, Ruel Churchill 1999, Konrad Knopp 1996].
40

Borra
dor Pre
limin
ar
1.3. INTEGRALES COMPLEJAS
El Teorema de Stokes nos dice que∫R
dxdy
(∂p
∂x+∂q
∂y
)=
∮C(pdy − qdx) ,
con lo cual, si una vez mas suponemos f(z) = u(x, y) + iv(x, y) y dz = dx+ idy, entonces tendremos que∮C
(udx− vdy) + i
∮C
(vdx+ udy) =
∫R
dxdy
(∂(−v)
∂x+∂(−u)
∂y
)+ i
∫R
dxdy
(∂(u)
∂x+∂(−v)
∂y
)= 0 ,
y acto seguido, como f(z) es analıtica, invocamos las condiciones de Cauchy Riemann (ecuacion (1.6)) y esinmediato ver que se anula la integral de circulacion.
1.3.4. Algunas observaciones y el Teorema de Morera
De la anterior “demostracion” del Teorema de Cauchy Riemann emergen algunas observaciones
La primera es la insistencia de que la condicion que la derivada f ′(z) existe y es continua en esta regionno es necesaria.
La segunda es que el Teorema de Cauchy, es valido tambien para regiones multiplemente conexas.Consideremos una region como la descrita en la figura 1.6 cuadrante II, es claro que podemos circularla integral en los siguientes contornos∮C
dz f(z) =
∫ABDEAFGHFA
dz f(z) ≡∫ABDEA
dz f(z)+
∫AF
dz f(z)+
∫FGHF
dz f(z)+
∫FA
dz f(z) = 0 ,
y como∫AF
dz f(z) = −∫FA
dz f(z) entonces∫ABDEA
dz f(z) +
∫FGHF
dz f(z) = 0 ⇔∮C1
dz f(z) +
∮C2
dz f(z) = 0 ,
con lo cual se nota que para regiones multiplemente conexas, a pesar que las circulaciones son opuestas,el “observador” que circula por C1 y C2 siempre tiene la region R a su izquierda.
Siguiendo con la reflexion anterior, podemos invertir el sentido de la circulacion en el contorno C2 conlo cual ∮
C1dz f(z)−
∮C2
dz f(z) = 0 ⇔∮C1
dz f(z) =
∮C2
dz f(z) .
Es decir, que si f(z) es analıtica en una region R, da igual cualquier recorrido por las fronteras de unaregion y el valor de la integral permanecera inalterado.
Mas aun, este resultado puede extenderse a regiones con n huecos de tal forma que, tal y como ilustraen en la figura 1.6 cuadrante III ∮
C1dz f(z) =
n∑j=1
∮Cj
dz f(z) .
Con lo cual estamos afirmando que, dada una region que contiene un numero finito (¿numerable?) nde singularidades, la integral a lo largo del contorno que encierra la region R es equivalente a la sumade las integrales que encierran cada una de las n singularidades.
Enunciaremos sin demostracion el Teorema de Morera5, tambien conocido como el teorema inverso deCauchy.
5Pueden consultar la demostracion en la referencia [Arfken, Weber y Weber 2000].
41

Borra
dor Pre
limin
ar
1.3. INTEGRALES COMPLEJAS
Teorema de Morera: Si una funcion f(z) es continua en una region R encerrada por un contorno C y∮C dz f(z) = 0 entonces f(z) es analıtica en R.
1.3.5. Formula integral de Cauchy
El ejemplo de la seccion anterior nos lleva a una de las expresiones mas utiles e importantes del analisiscomplejo: La Formula Integral de Cauchy, la cual dice que si f(z) es analıtica en una region R encerradapor un contorno C y consideramos un punto z = z0 contenido en esa region, entonces
1
2iπ
∮C
f(z) dz
z − z0= f(z0) . (1.9)
Para probar esta afirmacion supongamos una vez mas un circuito en encierra al polo z = z0 (ver figura1.8 cuadrante II). Con lo cual, como f(z) es analıtica en una region, el Teorema de Cauchy nos garantiza
1
2iπ
∮C
f(z) dz
z − z0=
1
2iπ
∮Γ
f(z) dz
z − z0,
si z − z0 = reiθ, entonces
1
2iπ
∫ 2π
0
f(z0 + reiθ)rieiθdθ
reiθ=
1
2π
∫ 2π
0
f(z0 + reiθ)dθ .
Si hacemos r → 0 tendremos que
1
2iπ
∮C
f(z) dz
z − z0=
1
2iπ
∮Γ
f(z) dz
z − z0= lımr→0
1
2π
∫ 2π
0
f(z0 + reiθ)dθ =1
2π
∫ 2π
0
lımr→0
f(z0 + reiθ)dθ = f(z0) .
Observaciones Surgen tambien observaciones al respecto
Obvio que es valido para regiones multiplemente conexas y es facil demostrarlo. Se lo dejamos al lectorcomo ejercicio.
Si reacomodamos la expresion para la forma integral podemos hacer que esa formula sea valida paratodo z
f(z) =1
2iπ
∮C
f(ζ) dζ
ζ − z.
Mas aun, veremos que es facil generalizar esta formula para derivadas de funciones, vale decir
f (n)z0) =n!
2iπ
∮C
f(z) dz
(z − z0)n+1. (1.10)
Veamos el caso mas sencillo y demostremos que para n = 1 resulta:
f ′(z0) =1
2iπ
∮C
f(z)dz
(z − z0)2
= lımh→0
f(z0 + h)− f(z0)
h= lımh→0
[1
2iπ
∮C
f(z)
h
{1
z − z0 − h− 1
z − z0
}dz
],
42

Borra
dor Pre
limin
ar
1.3. INTEGRALES COMPLEJAS
Figura 1.7: Integrales complejas y circuitos
tal y como se muestra en la figura 1.8, cuadrante III tenemos que
f ′(z0) = lımh→0
[1
2iπ
∮C
f(z) dz
(z − z0 − h)(z − z0)
]=
1
2iπ
∮C
f(z) dz
(z − z0)2.
Pero mucho mas interesante hubiera sido “derivar respecto a una constante”. Este truco implica que
f(z) =1
2iπ
∮C
f(ζ) dζ
ζ − z⇒ f (n)(z) =
1
2iπ
∮C
∂n
∂zn
[f(ζ)
ζ − z
]dζ =
n!
2iπ
∮C
f(ζ) dζ
(ζ − z)n+1(1.11)
Esta formula es muy util para calcular integrales. Considere, por ejemplo la siguiente integral
I =
∮C
e2ζ dζ
(ζ + 1)4≡ 2iπ
3!f (3)(−1) con f(z) = e2z ⇒ I =
8iπ
3e−2 ,
donde hemos supuesto que el contorno C encerraba el punto z = −1, porque de otro modo la funcione2z
(z + 1)4serıa analıtica y la integral se anularıa por el Teorema de Cauchy.
1.3.6. Ejemplos
1. Evaluemos la integral compleja f(z) = z−1 a lo largo de diferentes contornos, tal y como se ilustran enla figura 1.7
a) un circuito cerrado a lo largo de una circunferencia de radio R∮dz z−1 ≡
∮d(Reiθ) R−1e−iθ = i
∫ 2π
0
dθ = 2πi ,
b) siguiendo una semicircunferencia desde (R, 0)→ (−R, 0). Esto es∫ z2=(−R,0)
z1=(R,0)
dz z−1 =
∫ (R,π)
(R,0)
d(Reiθ) R−1e−iθ = i
∫ π
0
dθ = πi ,
c) siguiendo dos lıneas rectas entre los puntos (R, 0)→ (0, R)→ (−R, 0). En este caso, procedemosutilizando la expresion cartesiana para los numeros complejos. Para ello, vamos a parametrizarz = z(t) para (R, 0)→ (0, R) y z = z(s) cuando (0, R)→ (−R, 0). Veamos∫ z3=(−R,0)
z1=(R,0)
dz z−1 =
∫ z2=(0,R)
z1=(R,0)
dz z−1 +
∫ z3=(0,−R)
z2=(0,R)
dz z−1 ,
43

Borra
dor Pre
limin
ar
1.3. INTEGRALES COMPLEJAS
para cada una de las integrales se cumple, respectivamente, que
z = (1− t)R+ itR con 0 ≤ t ≤ 1 ∧ z = −sR+ i(1− s)R con 0 ≤ s ≤ 1 ,
con lo cual ∫ z2=(−R,0)
z1=(R,0)
dz
z=
∫ 1
0
dt−1 + i
1 + t(−1 + i)+
∫ 1
0
ds−1− i
i+ s(−1− i),
procedemos entonces con la primera de las integrales∫ 1
0
(−1 + i)dt
(1− t) + it=
∫ 1
0
(−1 + i)((1− t)− it)dt(1− t)2 − t2
=
∫ 1
0
(2t− 1)dt
1− 2t+ 2t2+ i
∫ 1
0
dt
1− 2t+ 2t2,
es decir∫ 1
0
(−1 + i)dt
(1− t) + it=
1
2ln(1− 2t+ 2t2)
∣∣10
+ i arctan
(t− 1
212
)∣∣∣∣10
= 0 +i
2
(π2−(−π
2
))=π
2,
y, la segunda integral tambien tendra el mismo resultado, con lo cual∫ z2=(−R,0)
z1=(R,0)
dz
z= πi ¡el mismo resultado que a traves del arco de circunferencia!.
Es interesante notar que si regresamos al punto (R, 0) a traves del contorno (−R, 0)→ (0,−R)→(R, 0) la integral cerrada se anula, no ası cuando nos regresamos a traves el arco complementariode circunferencia. En pocas palabras, como se esperaba, el valor de las integrales de camino, paraalgunas funciones, dependeran del camino seleccionado. En la proxima seccion veremos a cualesfunciones correspondera un mismo valor de la integral cerrada, independientemente del circuitoque uno elija.
2. Otro ejemplo ilustrativo lo constituye∮dz
(z − z0)n+1⇒
∫ 2π
0
Rieiθdθ
Rn+1ei(n+1)θ=
i
Rn
∫ 2π
0
dθ e−inθ ⇒
n = 0 :∫ 2π
0dθ = 2iπ
n 6= 0 : iRn
∫ 2π
0dθ[cos(nθ)− isen(nθ)] = 0
donde hemos utilizado la forma polar z − z0 ≡ Reiθ e integrado a lo largo de una circunferencia deradio R centrada en z = z0.
3. Considere la funcion definida en una region R
f(z) =1
z − z0con
{z0 fuera de la region Rz0 dentro de la region R
Si z0 esta fuera de la region, entonces f(z) es analıtica en R, con lo cual el Teorema de Cauchyimplica que ∮
Cdz f(z) = 0 .
Si z0 esta dentro de la region, entonces f(z) no es analıtica en R por cuanto existe una singula-ridad z = z0. Si consideramos C el contorno que bordea a R, como una circunferencia centrada enz = z0 y Γ otra circunferencia que aısla a z0 con un radio |z− z0| = ε (esta situacion se ilustra enla figura 1.8 cuadrante I). Entonces, si hacemos z − z0 = z = εeiθ el Teorema de Cauchy implica∮
C
dz
z − z0=
∮Γ
dz
z − z0=
∫ 2π
0
εieiθdθ
εeiθ= i
∫ 2π
0
dθ = 2πi .
44

Borra
dor Pre
limin
ar
1.3. INTEGRALES COMPLEJAS
Figura 1.8: Circulaciones y Polos
4. Evaluar
I =1
2πi
∫C
ez
z − 2dz , para los entornos: C: |z| = 3 y C: |z| = 1 .
El entorno |z| = 3 contiene en su interior al punto z0 = 2, esto implica que:
1
2πi
∫C
ez
z − 2dz = e2 .
Para el entorno |z| = 1, vemos que el punto z0 = 2 no esta contenido en ese entorno, esto significa queel integrando es una funcion analıtica en toda la region. Por lo tanto:
1
2πi
∫C
ez
z − 2dz = 0 .
5. Evaluar
I =
∫C
1
z2 + 4dz , para los entornos: C1: |z − i| = 2 , C2: |z| = 3 y C3: |z + i| = 2 .
La integral puede ser escrita de la siguiente manera:
I =
∫C
1
(z + 2i)(z − 2i)dz .
Para el contorno |z − i| = 2, tenemos que este contiene en su interior al punto z0 = 2i. Si escribimosla integral como
I =
∫C
1z+2i
z − 2idz ,
la funcion 1/(z + 2i) es analıtica dentro de C1 y entonces por el teorema de Cauchy
I =
∫C
1z+2i
z − 2idz = 2πi
(1
4i
)=π
2.
45

Borra
dor Pre
limin
ar
1.3. INTEGRALES COMPLEJAS
Consideremos ahora el contorno |z| = 3. Este contorno contiene en su interior a los puntos 2i y −2i.Podemos trazar dos contornos adicionales, de radio ε alrededor de cada punto, entonces:∫
C
1
z2 + 4dz =
∫C(2i)
1
z2 + 4dz +
∫C(−2i)
1
z2 + 4dz
=
∫C(2i)
1z+2i
z − 2idz +
∫C(−2i)
1z−2i
z + 2idz
= 2πi
[1
z + 2i
]z=2i
+ 2πi
[1
z − 2i
]z=−2i
= 2πi
[1
4i
]+ 2πi
[− 1
4i
]= 0 .
Finalmente, para el contorno |z + i| = 2 se tiene que este contiene al punto z0 = −2i. Repitiendo loque hicimos en el primer caso tenemos:
I =
∫C
1z−2i
z + 2idz ,
la funcion 1/(z − 2i) es analıtica dentro de C3 y entonces por el teorema de Cauchy
I =
∫C
1z−2i
z + 2idz = 2πi
(− 1
4i
)= −π
2.
46

Borra
dor Pre
limin
ar
1.3. INTEGRALES COMPLEJAS
1.3.7. Practicando con Maxima
Para integrar funciones en variable compleja podemos utilizar el comando integrate. Lo que necesitamoses definir de manera correcta el camino de integracion, en el ejemplo siguiente C(t) = cos(t) + isen(t).Recordemos que “:=” nos permite definir una funcion mientras que “ : ” es una asignacion a una variable.
( % i2) C(t):= cos(t) + %i*sin(t); dC: diff(C(t),t);
C(t) := cos (t) + i sin (t) ( % o1)
i cos (t)− sin (t) (dC)
( % i3) f(z):= 1/z;
f(z) :=1
z( % o3)
Escribimos la forma que tiene el integrando
( % i4) integrando: f(C(t))*dC$
Y procedemos a hacer la integracion
( % i5) ’integrate(integrando,t,0,2* %pi)=integrate(integrando,t,0,2* %pi);∫ 2π
0
i cos (t)− sin (t)
i sin (t) + cos (t)dt = 2iπ ( % o5)
Podemos recurrir a un progrma que nos permita integrar una funcion dada f(z) = C → C sobre uncamino z(τ) = R→ C, para un parametro a ≤ τ <≤ b
( % i6) IntC(f,r,τ ,a,b):=block( [f1,dz,Iout],f1:subst(z=r,f),dz:diff(r,τ),Iout: ’integrate(f1*dz,τ ,a,b)=integrate(f1*dz,τ ,a,b), Iout )$
Para la funcion f(z) = 1/z y el camino C(τ) = cos(τ) + isen(τ).
( % i7) IntC(1/z,cos(τ)+ %i*sin(τ),τ ,0,2* %pi);∫ 2π
0
i cos (τ)− sin (τ)
i sin (τ) + cos (τ)dτ = 2iπ ( % o7)
Consideremos ahora f(z) = z∗ con C(τ) = cos(τ) + isen(τ).
( % i8) IntC(conjugate(z),cos(τ)+ %i*sin(τ),τ ,0,2* %pi);∫ 2π
0
(i cos (τ)− sin (τ)) (i sin (τ) + cos (τ)) dτ = 0 ( % o8)
En este ejemplo f(z) = 1/(z − a) y C(τ) = cos(τ) + isen(τ).
( % i9) IntC(1/(z-a),cos(τ)+ %i*sin(τ),τ ,0,2* %pi);
Is |a| − 1 positive, negative or zero? n;
47

Borra
dor Pre
limin
ar
1.3. INTEGRALES COMPLEJAS
∫ 2π
0
i cos (τ)− sin (τ)
i sin (τ) + cos (τ)− adτ = 2iπ ( % o9)
Para f(z) = (z3 − 3)/(2z − i)
( % i10) IntC((zˆ3-3)/(2*z- %i),cos(τ)+ %i*sin(τ),τ ,0,2* %pi);
∫ 2π
0
(i cos (τ)− sin (τ))(
(i sin (τ) + cos (τ))3 − 3
)2 (i sin (τ) + cos (τ))− i
dτ = − (24i− 1)π
8( % o10)
( % i11) kill(all)$
1.3.8. Ejercicios
1. Repetir los mismos pasos del primer ejemplo, 1.3.6, para el caso de
f(z) = (z∗)−1 .
2. Evaluar las siguientes integrales
(a)∫ 2
1
(1t − 1
)2dt , (b)
∫ π/60
ei2tdt , (c)∫∞
0e−iztdt , <(z) > 0.
3. Demuestre que si m y n son enteros, entonces∫ 2π
0
eimθe−inθdt =
{0 cuando m 6= n
2π cuando m = n
4. Utilizando una representacion parametrica para los diferentes caminos C evalue la integral∫C
f(z)dz
a) f(z) = (z + 2)/z y C:
1) El semicırculo z = 2eiθ con (0 ≤ θ ≤ π).
2) El semicırculo z = 2eiθ con (π ≤ θ ≤ 2π).
3) El cırculo z = 2eiθ con (0 ≤ θ ≤ 2π).
b) f(z) = z − 1 y C el arco que va desde z = 0 a z = 2, conformado por
1) El semicırculo z = 1 + eiθ con (π ≤ θ ≤ 2π).
2) El segmento z = 2 (0 ≤ x ≤ 2) y el eje real.
c) f(z) = πeπz∗
y C el contorno conformado por el cuadro con vertices en: 0, 1, 1 + i, i y en sentidoantihorario.
d)
f(z) =
{1 cuando y < 04y cuando y > 0
cuando C es el arco que va desde z = −1− i a z = 1 + i, conformado por la curva y = x3.
48
Borra
dor Pre
limin
ar
1.3. INTEGRALES COMPLEJAS
5. Evalue la integral ∮C
Ln(1− z)dz ,
donde C es el contorno del paralelogramo con vertices en ±i,±(1 + i).
6. Evalue la integral ∮C
dz
z − 3i,
donde C es el cırculo |z| = π y en sentido antihorario.
7. Evalue la integral ∮C
<(z)dz ,
donde C es el el arco del semicırculo superior |z| = 1 y en sentido antihorario.
8. Evalue la integral ∮C
2z − 1
z2 − zdz ,
donde C es la elipse con focos en z = 0 y z = 2 y en sentido antihorario.
9. Utilizando la formula integral de Cauchy integre la siguiente funcion en sentido antihorario,
f(z) =z2
z2 − 1
alrededor de los cırculos
(a) |z + 1| = 1 , (b) |z − 1− i| = π/2 , (c) |z + i| = 14/10 , (d) |z + 5− 5i| = 7 .
10. Integre las siguientes funciones alrededor del cırculo unitario y en sentido antihorario
(a) cos(3z)/(6z) , (b) e2z/(πz − i) , (c) z3/(2z − i) , (d) (z2sen(z)/(4z − 1) .
11. Integre en sentido antihorario
a) ∮C
dz
z2 + 4, C : 4x2 + (y − 2)2 = 4 .
b) ∮C
zdz
z2 + 4z + 3, C : cırculo con centro en − 1 y radio 3 .
c) ∮C
z + 2
z − 2dz , C : |z − 1| = 2 .
d) ∮C
ezdz
zez − 2iz, C : |z| = 0, 6 .
12. Demuestre que ∮C
1
(z − z1)(z − z2)= 0 ,
para un camino cerrado simple C que contiene los puntos z1 y z2 arbitrarios.
49

Borra
dor Pre
limin
arCapıtulo 2Series I
50

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
La ruta de este capıtulo
2.1. Sucesiones y Series
Basicamente el tema central de este curso tiene que ver con el estudio de las ecuaciones diferencialesordinarias y el desarrollo de metodos para resolverlas. Las ecuaciones diferenciales aparecen ya como temade estudio, o curiosidad matematica, desde los tiempos de Isaac Newton1 cuando se comenzo con el desarrollodel Calculo Diferencial. El propio Newton las estudia en su tratado de calculo diferencial donde discute sussoluciones a traves de una expansion en series.
Newton estudia la siguiente ecuacion diferencial, que por contener una primera derivada llamaremos unaecuacion diferencial de primer orden:
dy(x)
dx= 1− 3x+ y(x) + x2 + xy(x) . (2.1)
Para buscar su solucion, Newton propone el siguiente metodo que consiste en suponer una solucion que tienela forma de una serie infinita. El primer termino de la serie es:
y = 0 + · · ·
el cual corresponde al valor inicial x = 0 en la ecuacion (2.1).Al insertar este valor en (2.1) resulta
dy(x)
dx= 1 + · · ·
que al integrarse se obtieney = x+ · · ·
Sustituyendo esta ultima expresion en (2.1), resulta
dy(x)
dx= 1− 3x+ x+ · · · = 1− 2x+ 2x2 + · · ·
Integrando esta ultima ecuacion, se obtiene
y = x− x2 +2
3x2 + · · ·
Repitiendo el proceso:
dy(x)
dx= 1− 2x+ x2 − 1
3x3 +
2
3x4 · · · ⇒ y = x− x2 +
x3
3− 1
12x4 +
2
15x5 + · · ·
Continuando con el metodo repetidamente se van calculando los diferentes terminos de la serie
y = x− x2 +x3
3− x4
6+x5
30− x6
45+
x7
630+ · · ·
En la figura 2.1 se puede apreciar parte del manuscrito original donde aparece el esquema de solucionpor series propuesto por Newton.
1Sir Isaac Newton (1643-1727), fue un cientıfico, fısico, filosofo, inventor, alquimista y matematico ingles, autor de losPhilosophiae Naturalis Principia Mathematica, mas conocidos como los Principia, donde describio la ley de gravitacion universaly establecio las bases de la Mecanica Clasica mediante las leyes que llevan su nombre. Entre sus otros descubrimientos cientıficosdestacan los trabajos sobre la naturaleza de la luz y la optica y el desarrollo del calculo matematico. Newton fue el primeroen demostrar que las leyes naturales que gobiernan el movimiento en la Tierra y las que gobiernan el movimiento de loscuerpos celestes son las mismas. Es, a menudo, calificado como el cientıfico mas grande de todos los tiempos, y su obra comola culminacion de la revolucion cientıfica. (Tomado de Wikipedia).
51

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
Figura 2.1: El esquema de Newton
Por otra parte, notemos que para cada valor de x y y, la ecuacion (2.1) no es mas que la derivada y′(x),es decir la pendiente, de las soluciones de:
y′(x) = 1− 3x+ y(x) + x2 + xy(x) .
De esta manera, con un poco de paciencia, o con algun programa de computacion algebraico apropiado, sepuede obtener el campo vectorial correspondiente a la ecuacion diferencial, como se puede apreciar en la figura2.2 (figura 2a). En realidad las soluciones se pueden ver como las curvas determinadas por las direccionesindicadas en el campo vectorial, figura 2b. Las aproximaciones que se van obteniendo con el metodo mostradoanteriormente se pueden observar, junto con la solucion verdadera en la Figura 2c. Notemos que todas lasaproximaciones son mas cercanas entre si cuando x toma valores cada vez mas proximos a cero.
Comencemos entonces nuestro estudio sobre ecuaciones diferenciales precisamente con las series ma-tematicas.
2.1.1. Introduccion a las sucesiones
Para empezar, vayamos a la nocion elemental de sucesiones. Basicamente, una sucesion es una coleccionnumerable de elementos, dados en cierto orden, como:
1, 2, 3, 4, . . . , 1, x, x2, x3, . . . , a, b, c, d .
En matematicas se puede entender las sucesiones como una aplicacion desde los numeros naturales acualquier otro conjunto, no necesariamente de la misma naturaleza. Estos numeros se denominan los terminos,elementos o miembros de la sucesion. Siendo mas rigurosos, una sucesion se puede definir como una funcionsobre el conjunto de los numeros naturales, es decir, que estarıamos hablando en este caso de una funciondiscreta.
52

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
xK2 K1 0 1 2
y(x)
K2
K1
1
2
a
xK2 K1 0 1 2
y
K2
K1
1
2b
C1 C2 C3 C4 Sol.
xK2 K1 0 1 2
y
K2
K1
1
2(c)
Figura 2.2: (a) Representacion de los campos vectoriales. (b) Diferentes soluciones para la ecuacion diferencial (2.1).(c) La solucion correcta correspondiente al valor inicial y(0) = 0 con las diferentes soluciones aproximadas.
Es bastante comun que se confundan las sucesiones con series matematicas, veremos que una serie en-tenderemos es en realidad una suma de terminos.
Las sucesiones se diferencian de los conjuntos en el hecho de que es importante considerar el orden en queaparecen distribuidos. Ademas, un mismo termino de una sucesion puede aparecer varias veces en posicionesdiferentes. Esto significa que las siguientes sucesiones finitas son diferentes:
a, b, c, d 6= b, c, d, a .
Una sucesion puede contener infinitos elementos y en este caso se denomina una sucesion infinita, por lotanto, si a cada numero entero positivo se le asocia un elemento un, entonces el conjunto ordenado:
u1, u2, u3, ...un, . . . .
define una sucesion infinita. Cada termino un tendra un siguiente termino un+1 y por lo tanto no existe unultimo termino.
Las sucesiones se pueden expresar de una manera mas sencilla definiendo el n-esimo termino, como porejemplo:
un =1
n, n = 1, 2, 3, . . .
cuyos primeros cuatro terminos son:
1,1
2,
1
3,
1
4.
Otra manera de definir sucesiones es por medio de una relacion de recurrencia, por ejemplo, para la bienconocida sucesion de Fibonacci la relacion de recurrencia es:
u1 = u2 = 1 , un+1 = un + un−1 , n ≥ 2 ,
y cuyos primeros terminos son:1, 1, 2, 3, 5, 8, 13, 21, 34, . . .
Como curiosidad matematica, podemos ver que existe una funcion que permite generar los numerosde Fibonacci, esta funcion cuando se expande en potencias de x tiene como coeficientes, ¡los numeros deFibonacci!
f(x) =x
1− x− x2= x+ x2 + 2x3 + 3x4 + 5x5 + 8x6 + 13x7 + 21x8 + 34x9 + · · ·
53

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
Tambien es posible definir una sucesion a traves del concepto de funcion. Se define una funcion para losenteros positivos, de manera que f(n) es el termino n-esimo de la sucesion para cada n = 1, 2, 3, . . . . Por lotanto, los terminos de las sucesion se escriben como:
f(1), f(2), f(3), ...f(n), . . .
Las siguientes formulas son ejemplos de sucesiones:
f(n) = (−1)n ⇒ −1, 1,−1, 1,−1, . . .
f(n) = sen(nπ
2
)⇒ sin
(π2
), sin (π) , sin
(3π
2
), sin (2π) , sin
(5π
2
). . .
f(n) = (−1)n[1 +
1
n
]⇒ −2,
3
2,−4
3,
5
4,−6
5. . .
Las sucesiones pueden tener la caracterıstica de ser crecientes o decrecientes. Una sucesion {f(n)} se diceque es creciente si:
f(n) ≤ f(n+ 1) ∀ n ≥ 1 ,
es decir, cada termino es menor o igual al termino siguiente. Y si de impone la condicion f(n) < f(n+ 1) sedenomina estrictamente creciente. Por otro lado, una sucesion se llama decreciente si:
f(n) ≥ f(n+ 1) ∀ n ≥ 1 .
y estrictamente decreciente si f(n) > f(n+ 1).
Las sucesiones pueden estar acotadas de diferentemanera. Diremos que la sucesion {f(n)} es aco-tada superiormente si existe un numero positivoM tal que f(n) ≤M para todo n. Tambien pue-de ser acotada inferiormente si existe un numeropositivo N tal que f(n) ≥ N para todo n. En elcaso de cumplirse ambas condiciones hablaremosde una sucesion acotada N ≤ f(n) ≤M .Podemos hablar de sucesiones monotonas cuandola diferencia entre un termino y el que le siguesiempre es del mismo signo y ademas son del tipocreciente o decreciente.Nos vemos ahora en la necesidad de hablar delsignificado de los terminos convergencia o diver-gencia de una sucesion.
Figura 2.3: Sucesion convergente a cero.
La convergencia o divergencia se determina de manera sencilla, como lo indica el siguiente teorema:
Teorema: Una sucesion monotona converge si y solo si es acotada.
Revisemos el concepto de convergencia (divergencia). Cuando una sucesion converge, lo que significaes que tiende a un valor particular llamado su lımite, diremos en este caso la sucesion sera una sucesionconvergente. Las sucesiones que no son convergentes se denominan divergentes.
54

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
En otras palabras, una sucesion tiene lımite si los elementos de la sucesion se hacen cada vez mas y mascercanos a algun valor L (llamado lımite de la sucesion). Esto significa que dado un numero real ε mayor quecero, todos menos un numero finito de elementos de la sucesion estaran siempre a una distancia a L menorque ε.
Matematicamente es lo siguiente:lımn→∞
f(n) = L . (2.2)
Si una sucesion f(n) converge, entonces el lımite 2.2 existe, es unico y la sucesion es acotada.En la figura 2.3 podemos ver una representacion grafica para la sucesion:
f(n) =n+ 1
2n2.
Esta serie converge, y es facil ver que:
lımn→∞
n+ 1
2n2= 0 .
Tambien existen las sucesiones oscilantes, lascuales suelen ser divergentes por no tener lımite.Estas sucesiones presentan terminos que se al-ternan de manera indefinida. Cuando cambiande signo se llaman sucesiones alternadas, co-mo la que mencionamos anteriormente f(n) =(−1)n ⇒ −1, 1,−1, 1,−1, . . . .Un ejemplo particular de sucesiones oscilantesconvergentes es la sucesion de Cauchy. Una suce-sion de numeros reales: x1, x2, x3, . . . se denomi-na una sucesion de Cauchy fundamental si paratodo numero positivo ε existe un entero positi-vo M tal que para todos los numeros naturalesn,m > M se cumple:
|xm − xn| < ε .
Figura 2.4: Sucesion de Cauchy.
En este tipo de sucesiones los elementos se la sucesion se vuelven arbitrariamente cercanos entre sı amedida que la sucesion progresa, como se puede ver en la figura 2.4. Esta condicion, necesaria para hablarde convergencia, se llama la condicion de Cauchy.
Existe una serie de resultados interesantes que podemos mencionar:
Toda sucesion convergente es de Cauchy.
Toda sucesion de Cauchy esta acotada.
Para los numeros reales R, toda sucesion de Cauchy es convergente.
Toda sucesion convergente esta acotada.
A medida que n se hace cada mas grande, el valor de una sucesion {f(n)} o {un} se puede comportarde una manera bastante particular. Por ejemplo, si un = 1/n, es claro que un converge a cero a medida quen→∞. Pero si un = eαn, el lımite dependera del valor de α.
Por lo tanto, la pregunta a responder tiene que ver con el hecho de saber si los terminos de un tienden,o no, a un lımite finito cuando n crece indefinidamente.
55

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
2.1.2. Acercandonos al concepto de series
Con el concepto de sucesiones es posible definir una expresion analıtica que formalmente tiene aspectode suma, que contiene un numero infinito de sumandos y que denominaremos serie infinita.
Si {un} (con n = 1, 2, 3, . . . ) es una sucesion infinita de numeros reales o complejos, es posible formaruna nueva sucesion {sn} a partir de tomar sumas parciales de {un}. Veamos el procedimiento:
s1 = u1 , s2 = u1 + u2 , s3 = u1 + u2 + u3 , . . . sn = u1 + u2 + u3 + · · ·un =
n∑i=1
ui .
Es decir, partimos con s1 = u1 y decimos que para todo n ∈ N se tiene que sn+1 = sn+un+1. La sucesion{sn} la llamaremos la serie de termino general an definida a traves de la sucesion {un} y la representaremospor:
∞∑n=1
un . (2.3)
Al numero
sn =
n∑i=1
ui
le denominaremos la suma parcial de orden n de la serie (2.3).Es importante aclarar que una serie es una sucesion cuyos terminos se obtienen al sumar de manera
consecutiva lo terminos de una sucesion diferente.Si la sucesion sn tiende a un lımite S, la serie infinita
∞∑i=1
ui ,
se dice que es convergente y converge al valor S, el cual es unico. Entonces se puede escribir:
S = u1 + u2 + u3 + · · ·+ un + · · · =∞∑n=1
un = lımn→∞
{sn} = lımn→∞
n∑i=1
ui . (2.4)
El numero S se denomina la suma de la serie infinita y debe ser entendido como el lımite de la sucesion.Lo anterior se puede formalizar diciendo que la condicion para la existencia de un lımite S es que para
cada ε > 0 existe un numero N = N(ε) ∈ N tal que:
|S − si| < ε para i > N ⇒ |sj − si| < ε para, todo i, j > N .
Esta afirmacion se denomina criterio de Cauchy2 sobre la convergencia de las series parciales, y vienea ser la condicion necesaria y suficiente para que una suma parcial si converja a medida que avanzamos enlos terminos de la serie.
Se dira que la serie diverge si el valor de la sumatoria aumenta indeteniblemente.La serie tambien puede oscilar:
si =
i∑n=1
(−1)n = 1− 1 + 1− 1 + · · ·+ (−1)i + · · ·
2Augustin Louis Cauchy Parıs, 1789 - 1857, matematico frances pionero en los estudios de analisis (real y complejo) yde la teorıa de los grupos de permutacion. Cauchy hizo aportes importantes en los criterios de convergencia y divergencia deseries infinitas, ası como tambien, en ecuaciones diferenciales, determinantes, probabilidades y fısica matematica
56

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
Aquı sn sera 0 o 1 y por lo tanto el lımite no existe.La serie cuyos terminos son tomados a partir del (n+ 1)-esimo termino, y en el mismo orden, de la serie
(2.4) se llama el resto n-esimo de la serie (2.4) y se denota por:
∞∑k=n+1
uk ⇒ un+1 + un+2 + un+3 + · · · . (2.5)
Si el resto n-esimo de la serie (2.4) converge, entonces su suma:
rn =
∞∑k=n+1
uk , (2.6)
se denomina el resto de la serie.De las series nos interesa conocer cuanto suman. Es decir, cual es el valor de si para una serie finita
donde i = N . Pero tambien estamos interesados en conocer cuanto suma una serie infinita.
2.1.3. Series elementales
Probablemente, de cursos anteriores hemos conocido algunas series emblematicas, estudiemos aquı algunasde estas series:
Serie aritmetica
Seguramente con anterioridad hemos oıdo hablar de progresiones aritmeticas. Ellas son, sencillamenteseries de la forma:
sN =
N−1∑n=0
(a+ nd) = a+ (a+ d) + (a+ 2d) + (a+ 3d) + (a+ 4d) + · · ·+ [a+ (N − 1)d] ,
donde a y d son numeros reales o complejos.
Al desarrollar la serie anterior en orden inverso y sumarla con la serie original obtemos:
sN = a +(a+ d) +(a+ 2d) +(a+ 3d) + · · · + [a+ (N − 1)d]sN = [a+ (N − 1)d] + [a+ (N − 2)d] + [a+ (N − 3)d] + [a+ (N − 4)d] + · · · +a
resultando:
2sN = N [a+ a+ (N − 1)d] ⇒ sN =N
2
[Primer Termino + Ultimo Termino
]obviamente, si N →∞ la serie diverge.
Serie Geometrica
De esta serie tambien sabemos que:
sN =
N∑n=0
xn = 1 + x+ x2 + x3 + · · ·+ xN ,
y si realizamos la resta sN − xsN , tenemos
sN = 1 +x +x2 +x3 + · · · +xN
xsN = x +x2 +x3 +x4 + · · · +xN+1
57

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
Es inmediato comprobar que:
(1− x)sN = 1− xN+1 ⇒ sN =1− xN+1
1− x=
1
1− x− xN+1
1− x,
Notemos que si x 6= 1 podemos reescribir la serie anterior como:
n∑n=0
xn = 1 + x+ x2 + x3 + · · ·+ xn =1
1− x− xn+1
1− x(2.7)
Por lo tanto podemos ver que si |x| < 1 tendremos que la suma sera:
lımn→∞
xn+1
1− x= 0 ⇒ lım
n→∞
n∑n=0
xn =
∞∑n=0
xn =1
1− x. (2.8)
Por otro lado, la serie divergira (u oscilara) si |x| > 1.
Series Aritmetico-geometricas
Estas series, un poco mas exoticas y como su nombre lo sugiere son una combinacion de las anteriores.
sN =
N−1∑n=0
(a+nd)xn = a+ (a+d)x+ (a+ 2d)x2 + (a+ 3d)x3 + (a+ 4d)x4 + · · ·+ [a+ (N − 1)d]xN−1 .
Utilizando la misma estrategia que aplicamos a las series geometricas (se deja como ejercicio al lector)se llega a encontrar el valor, nada intuitiva, de la suma S:
sN =a− [a+ (N − 1)d]xN
1− x+xd(1− xN−1)
(1− x)2.
Otra vez, si |x| < 1, entonces cuando N →∞ la serie converge a:
S =a
1− x+
xd
(1− x)2.
Serie Armonica
Quiza no la conocıamos con este nombre (y menos por sus propiedades) pero seguro nos la hemostropezado.
∞∑n=1
1
n= 1 +
1
2+
1
3+
1
4+
1
5+ · · · 1
n+ · · ·
Esta serie infinita resulta ser enganosa, en apariencia parece converger, pero no es ası. Ademas notemoslo siguiente:
20∑n=1
1
n≈ 3, 5977 ,
220∑n=1
1
n≈ 5, 9731 ,
20220∑n=1
1
n≈ 10, 492 ,
la suma de los primeros 20 terminos es mas grande que la suma de los siguientes ¡200 terminos! y dala impresion de que la serie crece muy lentamente hacia algun valor lımite.
58

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
Si analizamos con mas cuidado, veremos que hay sutilezas. Acomodemos los terminos de la siguienteforma:
∞∑n=1
1
n= 1 +
1
2︸︷︷︸σ0
+
(1
3+
1
4
)︸ ︷︷ ︸
σ1
+
(1
5+
1
6+
1
7+
1
8
)︸ ︷︷ ︸
σ2
+
(1
9+
1
10+ · · ·+ 1
16
)︸ ︷︷ ︸
σ3
+ · · ·
la expresion anterior puede ser reescrita como:
∞∑n=1
1
n= 1 +
1
1 + 1︸ ︷︷ ︸σ0
+1
2 + 1+
1
2 + 2︸ ︷︷ ︸σ1
+1
4 + 1+
1
4 + 2+
1
4 + 3+
1
4 + 4︸ ︷︷ ︸σ2
+1
8 + 1+
1
8 + 2+ · · ·+ 1
8 + 8︸ ︷︷ ︸σ3
+ · · ·+2n∑j=1
1
2n + j+ · · ·
con lo cual:
σ0 =1
2; σ1 =
7
12>
1
2; σ2 =
533
840>
1
2; σ3 =
95549
144144>
1
2; · · ·
y claramente diverge ya que:
1 + σ0 + σ1 + σ2 + σ3 + · · · > 1 +1
2+
1
2+
1
2+
1
2+ · · ·
Esta prueba aparentemente se le debe a Nicole D’Oresme3.
Ahora bien, notemos que para todo n ∈ N resulta:
∫ n
1
dx
x= ln(n) ⇒ ln(n) =
∫ 2
1
dx
x+
∫ 3
2
dx
x+
∫ 4
3
dx
x+ · · ·+
∫ k+1
k
dx
x=
n−1∑k=1
∫ k+1
k
dx
x
≤n−1∑k=1
∫ k+1
k
dx
k< 1 +
1
2+
1
3+ · · ·+ 1
n.
Es decir
lımn→∞
[1 +
1
2+
1
3+ · · ·+ 1
n
]≥ lımn→∞
ln(n) = +∞ .
Por lo tanto:∞∑n=1
1
n= +∞ .
Una de las generalizaciones de la serie armonica es la funcion Zeta de Riemann4
ζ(z) =
∞∑n=1
1
nz=
1
1z+
1
2z+
1
3z+ · · · , <(z) > 1 .
3Nicole D’Oresme (1323-1382) Matematico frances que invento la geometrıa coordenada antes de Descartes. Sobre la seriearmonica consulte: http://mathworld.wolfram.com/HarmonicSeries.html
4Georg Friedrich Bernhard Riemann (1826 Hanover, Alemania - 1866 Selasca, Italia) Matematico aleman cuyas ideassobre las geometrıa del espacio han tenido un profundo impacto en el desarrollo de la fısica teorica. Igualmente clarificola nocion de integral al introducir el concepto de lo que hoy se conoce como integral de Riemann. Mas detalles en http:
//mathworld.wolfram.com/RiemannIntegral.html.
59

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
Esta ultima expresion es tambien un ejemplo donde a partir de una serie se define una funcion, eneste caso una funcion analıtica. Aquı z puede ser un numero complejo, z = a+ ib, y la serie convergecuando su parte real es mayor o igual a 1.
La funcion Zeta de Riemann viene tambien definida por:
ζ(z) =1
Γ(z)
∫ ∞0
xz
x (ex − 1)dx , donde Γ(z) =
∫ ∞0
xze−x
xdx ,
Γ(z) es la funcion gamma.
Las mayorıa de las series que hemos mencionado con anterioridad tienen la particularidad de que todossus terminos son positivos, es decir, para la serie
∑an se tiene que an ≥ 0, y por lo tanto:
sn = sn−1 + an ≥ sn−1 ,
de manera que las sumas parciales sn son una sucesion monotona creciente.
2.1.4. Derivacion de series geometricas elementales
Las series infinitas se encuentran entre las mas poderosas herramientas que se introducen en un cursode calculo elemental. Son un ejercicio bastante inteligente para la manipulacion de limites y son una buenaherramienta para el estudio de las ecuaciones diferenciales, en el desarrollo de metodos numericos y paraestimar el comportamiento de funciones.
Consideremos la serie geometrica:
a+ az + az2 + az3 + · · ·+ azn + · · ·
con |z| < 1. Este es uno de los pocos ejemplos donde se puede encontrar el termino de las sumas parciales atraves de una expresion sencilla. Esta serie se puede tomar como punto de partida para encontrar la sumade un gran numero de series interesantes. Consideremos el caso a = 1 y z = x, como en la ecuacion (2.8).
1 + x+ x2 + x3 + · · ·+ xn + · · · = 1
1− x, |x| < 1 . (2.9)
Si cambiamos x por x2 en (2.9) resulta:
1 + x2 + x4 + x6 + · · ·+ x2n + · · · = 1
1− x2, |x| < 1 . (2.10)
Si se multiplica (2.10) por x se obtiene:
x+ x3 + x5 + x7 + · · ·+ x2n+1 + · · · = x
1− x2, |x| < 1 . (2.11)
Si cambiamos x por −x en (2.9) resulta:
1− x+ x2 − x3 + · · ·+ (−1)nxn + · · · = 1
1 + x, |x| < 1 . (2.12)
Si cambiamos x por x2 en (2.12) resulta:
1− x2 + x4 − x6 + · · ·+ (−1)nx2n + · · · = 1
1 + x2, |x| < 1 . (2.13)
60

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
Si se multiplica (2.13) por x se obtiene:
x− x3 + x5 − x7 + · · ·+ (−1)nx2n+1 + · · · = x
1 + x2, |x| < 1 . (2.14)
Si cambiamos x por 2x en (2.10) resulta:
1 + 4x2 + 16x4 + · · ·+ 4nx2n + · · · = 1
1− 4x2, |x| < 1
2. (2.15)
Si se deriva (2.9) entonces:
1 + 2x+ 3x2 + · · ·+ nxn−1 + · · · = 1
(1− x)2, |x| < 1 . (2.16)
Si se integra (2.12):
x− x2
2+x3
3− x4
4+ · · ·+ (−1)nxn+1
n+ 1+ · · · = ln(1 + x) , |x| < 1 . (2.17)
Si se integra (2.13) ahora resulta:
x− x3
3+x5
5− x7
7+ · · ·+ (−1)nx2n+1
2n+ 1+ · · · = arctan(x) , |x| < 1 . (2.18)
Siguiendo a Laplace, quien dijo que habıa que leer a Euler: “Read Euler, read Euler. He is the master ofus all ”, podemos hacer lo siguiente con la serie (2.17):
ln(1 + x) = x− x2
2+x3
3− x4
4+ · · · (2.19)
Es bueno acotar que Euler utilizo esta expresion para construir ¡tablas de logaritmos!Ahora hagamos lo siguiente, cambiemos x por −x en la ecuacion anterior:
ln(1− x) = −x− x2
2− x3
3− x4
4− · · · (2.20)
restando (2.19) menos (2.20):
ln(1 + x)− ln(1− x) =
[x− x2
2+x3
3− x4
4+ · · ·
]−[−x− x2
2− x3
3− x4
4− · · ·
]= 2x+
2x3
3+
2x5
5+ · · ·
Es decir:
ln
(1 + x
1− x
)= 2x+
2x3
3+
2x5
5+ · · ·
Para valores pequenos de x, digamos x = 1/3 resulta:
ln
(1 + 1
3
1− 13
)= ln (2) = 2
(1
3
)+
2(
13
)33
+2(
13
)55
+ · · · ≈ 0,6930041152
61

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
Euler noto la siguiente conexion entre logaritmos y las series armonicas. Cambiando x por 1/n en (2.19)se obtiene
ln
(1 +
1
n
)=
1
n− 1
2n2+
1
3n3− 1
4n4+ · · ·
por lo tanto:1
n= ln
(1 +
1
n
)+
1
2n2− 1
3n3+
1
4n4− · · ·
y para valores de n muy grandes, se cumple que:
1
n= ln
(n+ 1
n
)Ahora bien, para diferentes valores de n se obtienen las siguientes relaciones
n = 1 ⇒ 1 = ln (2) +1
2− 1
3+
1
4− · · ·
n = 2 ⇒ 1
2= ln
(3
2
)+
1
8− 1
24+
1
64− · · ·
n = 3 ⇒ 1
3= ln
(4
3
)+
1
18− 1
81+
1
324− · · ·
......
......
...1
n= ln
(n+ 1
n
)+
1
2n2− 1
3n3+
1
4n4− · · ·
Si sumamos columna por columna resulta:
n∑k=1
1
k= ln (2) + ln
(3
2
)+ ln
(4
3
)+ · · ·+ ln
(n+ 1
n
)+
1
2
[1 +
1
4+
1
9+ · · ·+ 1
n2
]− 1
3
[1 +
1
8+
1
27+ · · ·+ 1
n3
]+
1
4
[1 +
1
16+
1
81+ · · ·+ 1
n4
]− · · ·
Es facil ver que la suma de los logaritmos de la primera lınea se puede escribir como el logaritmo de susproductos, es decir,
ln (2) + ln
(3
2
)+ ln
(4
3
)+ · · ·+ ln
(n+ 1
n
)= ln
[2
(3
2
)(4
3
)· · · n+ 1
n
]= ln (n+ 1) .
De manera que, y siguiendo a Euler que llevo a cabo un estimado para los terminos sobrantes, resulta losiguiente:
n∑k=1
1
k≈ ln (n+ 1) + 0,577218 .
Para valores de n muy grandes la suma de las serie armonica es igual a un logaritmo mas una constante.Esta constante es actualmente llamada la Constante de Euler y denotada por la letra γ:
γ = lımn→∞
[n∑k=1
1
k− ln (n+ 1)
]. (2.21)
62

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
La constante de Euler juega un papel central en otras ramas de las matematicas, por ejemplo, en elanalisis real aparece como:
γ = −∫ ∞
0
e−x ln (x) dx .
2.1.5. El metodo de la diferencia
A veces para una serie finita, {sN}, uno encuentra que para el termino n-esimo se tiene que:
an = f(n)− f(n− 1) .
para alguna funcion f(n).En ese caso es inmediato demostrar lo siguiente:
sN =
N∑n=1
an =
N∑n=1
f(n)−N∑n=1
f(n− 1) = f(N)− f(0) . (2.22)
Por ejemplo, si tenemos la serie:N∑n=1
1
n(n+ 1),
se puede ver que:
an =1
n(n+ 1)= − 1
n+ 1+
1
n⇒ f(n) = − 1
n+ 1,
por lo tanto, la suma se podra expresar como:
sN = f(N)− f(0) = − 1
N + 1+ 1 =
N
N + 1.
Se puede ir mas alla si identificamos que el termino n-esimo tiene la forma:
an = f(n)− f(n−m) ,
por lo tanto, la suma de la serie se puede escribir como:
sN =
N∑n=1
an =
N∑n=1
f(n)−N∑n=1
f(n−m) . (2.23)
Hay que hacer notar que el argumento n−m puede ser positivo o negativo. Con lo cual el metodo de ladiferencia resulta versatil y muy util cuando se requiere encontrar la suma de series de variada dificultad.Podemos ver que:
Si m = 1
sN =
N∑n=1
an = f(N)− f(0) .
como la ecuacion (2.22).
Si m = 2
sN =
N∑n=1
an = f(N) + f(N − 1)− f(0)− f(−1) .
63

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
Si m = 3
sN =
N∑n=1
an = f(N) + f(N − 1) + f(N − 2)− f(0)− f(−1)− f(−2) .
Consideremos la siguiente serie y su expansion en fracciones simples
N∑n=1
1
n(n+ 2),
se tiene que el termino n-esimo es:
an =1
n(n+ 2)= − 1
2(n+ 2)+
1
2n⇒ f(n) = − 1
2(n+ 2),
de manera que:
an = f(n)− f(n− 2) = − 1
2(n+ 2)−(− 1
2n
),
de forma y manera que, como m = 2, resulta:
sN = f(N) + f(N − 1)− f(0)− f(−1) =3
4− 1
2
(1
N + 2+
1
N + 1
)=
N (3N + 5)
4 (N + 1) (N + 2).
Ahora bien, con alguna frecuencia surgen las series de numeros naturales. La mas simple es:
sN = 1 + 2 + 3 + · · ·+N =
N∑n=1
n =N(N + 1)
2,
es decir, una serie aritmetica de razon d = 1.Mas interesante puede ser la serie de cuadrados de numeros enteros:
sN = 1 + 22 + 32 + · · ·+N2 =
N∑n=1
n2 =N(N + 1)(2N + 1)
6.
Este resultado, nada intuitivo, surge de la aplicacion ingeniosa del metodo de la diferencia. Tal y comohemos dicho, se trata de encontrar que el elemento generico de la serie sea: an = f(n)− f(n− 1) = n2 paraalguna funcion.
Suponga una funcion del tipo
f(n) = n(n+ 1)(2n+ 1) ⇒ f(n− 1) = (n− 1)n(2n− 1) ,
entonces:f(n)− f(n− 1) = n(n+ 1)(2n+ 1)− (n− 1)n(2n− 1) = 6n2 ,
con lo cual:
an = 6n2 ⇒ sN =
N∑n=1
an =f(N)− f(0)
6=N(N + 1)(2N + 1)
6.
64

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
Sumando por analogıa
Como siempre, intentaremos proceder por analogıa. La intencion es expresar una serie complicada comosumas de series conocidas. Considere el siguiente ejemplo:
sN =
N∑n=1
(n+ 1)(n+ 3) =
N∑n=1
(n2 + 4n+ 3
)=
N∑n=1
n2 +
N∑n=1
4n+
N∑n=1
3 ,
con lo cual:
sN =N(N + 1)(2N + 1)
6+N(N + 1)
2+ 3N =
N(2N2 + 15N + 31)
6.
2.1.6. Algebra elemental de series
Las series se suman, se igualan y se multiplican. Para ello es importante que tengamos cuidado con losındices y sus valores. Consideremos un par de series infinitas:
u =
∞∑n=0
an y v =
∞∑n=0
bn ,
con lo cual la suma de esas series sera:
u+ v =
∞∑n=0
an +
∞∑n=0
bn =
∞∑n=0
(an + bn) .
Los ındices son mudos y se acomodan para ser sumados.Para sumar series es imperioso que los ındices de cada serie comiencen con el mismo valor, esto es:
∞∑n=0
an +
∞∑j=1
bj =
∞∑n=1
(an−1 + bn) = a0 +
∞∑n=1
(an + bn) .
Notese que hemos hecho los siguientes cambios: j → n y n→ n− 1.Algo parecido ocurre cuando las series se igualan:
∞∑n=0
bn =
∞∑n=1
nan ⇒∞∑n=0
bn =
∞∑k=0
(k + 1)ak+1 ⇐⇒∞∑n=0
[(n+ 1)an+1 − bn] = 0 .
Para finalizar se puede comprobar que las series tambien se pueden multiplicar:
u v =
∞∑n=0
an
∞∑n=0
bn =
∞∑n=0
cn ,
donde:cn = a0bn + a1bn−1 + · · ·+ ajbn−j + · · ·+ an−2b2 + an−1b1 + anb0 .
Cuando las sucesiones comprenden sumas y productos de otras sucesiones, es decir, sı uk y vk son dossucesiones con uk → U y vk → V cuando k →∞, entonces se cumple que:
1. si a y b son numeros independientes de k, entonces auk + bvk → aU + bV cuando k →∞.
2. ukvk → UV para k →∞.
3. si V 6= 0 entonces uk/vk → U/V a medida que k →∞.
4. si uk < vk ∀ k > N entonces U ≤ V cuando k →∞.
65

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
Teorema: Si la serie∑∞n=1 un converge, entonces cualquiera de sus restos converge. Si cualquier resto
de la serie∑∞n=1 un converge, entonces la propia serie tambien converge, y si ademas:
S =
∞∑n=1
un , si =
∞∑n=1
un , ri =
∞∑n=i+1
un .
Entonces:S = si + ri .
Se tiene entonces que es posible agregar o quitar un numero finito de terminos a la serie dada y estaoperacion no influira sobre su convergencia. Tambien se desprende del teorema anterior que si la serie convergeentonces su resto tiende a cero:
lımi→∞
ri = lımi→∞
(S − si) = 0 .
2.1.7. Series telescopicas
Una propiedad importante de las series finitas es la propiedad denominada telescopica:
n∑k=1
(ak − ak+1) = a1 − an+1 , (2.24)
para el caso de series infinitas, se consideran aquellas series∑un donde cada termino se puede expresar
como una diferencia de la forma:un = an − an+1 .
Las series telescopica son series cuyas sumas parciales se van cancelando de manera tal que al final resultaun numero fijo de terminos:
(a1 − a2) + (a2 − a3) + (a3 − a4) + · · ·+ (an − an+1) = a1 − an+1 .
Teorema: Sean {un} y {an} dos sucesiones de numeros reales o complejos tales que:
un = an − an+1 para n = 1, 2, 3, ... .
Entonces la serie∑un converge si y solo si la sucesion {an} converge, en cuyo caso se tiene:
∞∑n=1
un = a1 − L donde L = lımn→∞
an .
Consideremos la siguiente serie:∞∑n=1
1
n2 + n.
Podemos demostrar que:
un =1
n2 + n=
1
n− 1
n+ 1,
66

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
Es facil verificar que:
N∑n=1
[1
n− 1
n+ 1
]=
[1− 1
2
]+
[1
2− 1
3
]+
[1
3− 1
4
]+
[1
4− 1
5
]+ · · ·+
[1
N− 1
N + 1
]= 1− 1
N + 1.
Pero si aplicamos el teorema anterior, tenemos entonces que: an = 1/n , a1 = 1 y ademas ya vimos quela sucesion an = 1/n converge:
L = lımn→∞
an = lımn→∞
1
n= 0 .
Por lo tanto:∞∑n=1
1
n2 + n= 1 .
Las series pueden llegar a tener comportamientos extranos, como se ve con la siguiente serie armonicaalternada:
∞∑n=1
(−1)(n−1)
n= 1− 1
2+
1
3− 1
4+
1
5− 1
6+ · · · ,
Recordemos que anteriormente estudiamos la serie geometrica (2.7), la cual volveremos a escribir peroesta vez intercambiando x→ −x, de manera que nos queda de la siguiente forma:
1− x+ x2 − x3 + · · ·+ (−1)nxn + (−1)n+1 xn+1
1 + x=
1
1 + x. (2.25)
Ecuacion que es valida para todo n ∈ N y x 6= 1.Integrando (2.25) entre 0 y 1 se obtiene:
1− 1
2+
1
3− 1
4+ · · ·+ (−1)n
1
n+ 1+ (−1)n+1
∫ 1
0
xn+1
1 + xdx = ln(2)
n+1∑k=1
(−1)(k−1)
k+ (−1)n+1
∫ 1
0
xn+1
1 + xdx = ln(2) .
Por lo tanto:
ln(2)−n+1∑k=1
(−1)(k−1)
k= (−1)n+1
∫ 1
0
xn+1
1 + xdx .
Se puede ver tambien que:∫ 1
0
xn+1
1 + xdx ≤
∫ 1
0
xn+1dx =1
n+ 2⇒ ln(2)−
n+1∑k=1
(−1)(k−1)
k=
1
n+ 2
Entonces:
lımn→∞
[ln(2)−
n+1∑k=1
(−1)(k−1)
k
]= 0 ⇒ ln(2) =
∞∑n=1
(−1)(n−1)
n.
La suma tienen el valor de S = ln(2).Se puede mostrar lo que sucede si se arreglan los terminos de la manera siguiente:
S = 1 +
(1
3− 1
2+
1
5
)+
(1
7− 1
4+
1
9
)+
(1
11− 1
6+
1
13
)+ · · · ,
67

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
la cual contiene exactamente los mismos terminos, aunque en orden diferente, pero ahora la serie convergea S = 3
2 ln(2). Esta aparente contradiccion surge cuando pasamos por alto el hecho de que al sumar losterminos de una serie no se hace la suma con los infinitos terminos, lo que hacemos es calcular un lımitede una sucesion de terminos que se obtienen sumando de manera consecutiva los terminos de otra sucesiondada, es decir, lo que se hacemos es aplicar un proceso de lımite. Para que al sumar no importe el orden delos sumandos tendrıamos que sumar los infinitos terminos de la sucesion.
A pesar de que las series pueden presentar estos comportamientos extranos, las series resultan muy buenasrepresentaciones aproximadas de funciones, por ejemplo:
ex = 1 + x+x2
2!+x3
3!+x4
4!+ · · · =
∞∑n=0
xn
n!. (2.26)
La suma directa de una serie infinita no es un metodo practico para estudiar su convergencia, por ejemplo,la serie
∞∑k=2
ln(k)
k2,
converge al valor 0, 937548..., pero para obtener estos primeros cinco decimales se tendrıa que sumar unos107 terminos!
Es necesario entonces desarrollar algunos criterios que nos permitan saber si una serie puede llegar aconverger o no.
2.1.8. Ejemplos
1. Dada la sucesion {un} de numeros reales, se llama sucesion de Cauchy o sucesion fundamental, en elcaso de que satisfaga el requisito siguiente: dado un numero real r positivo se pueda conseguir dosenteros positivos p y q tal que de p > n0 y q > n0 se deduzca que |cp − cq| < r?.
En los numeros reales toda sucesion de Cauchy converge a algun lımite. Esta particularidad implicaun resultado importante en el analisis real que es la caracterizacion de Cauchy para la convergencia desucesiones:
Una sucesion de numeros reales es convergente (en los reales) si y solo si es de Cauchy.
2. Demuestre que∞∑n=1
1
2n= 1
Se tiene que
sn =1
2+
1
22+
1
23+ · · ·+ 1
2n,
y que al multiplicar por 12 se obtiene
1
2sn =
1
22+
1
23+
1
24+ · · ·+ 1
2n+1,
restando [1− 1
2
]sn =
1
2− 1
2n+1= 1− 1
2n.
por lo tanto
lımn→∞
[1− 1
2n
]= 1 ,
la serie converge.
68

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
2.1.9. Practicando con Maxima
Maxima puede calcular facilmente sumas numericas finitas, pero cuando le pedimos calcular sumassimbolicas infinitas podra calcularlas solo en casos particulares. Es util al trabajar con series utilizar lalibrerıa simplify sum
Veamos algunos ejemplos sencillos de sumas
(%i1) load(simplify_sum)$
(%i2) sum(n^2, n, 1, N);
( %o2)
N∑n=1
n2
(%i3) sum(1/n^2, n, 1, inf);
( %o3)
∞∑n=1
1
n2
La funcion sum nos deja indicada la suma porque no hemos especificado el rango para los valores de lasuma.
(%i4) sum(n^2, n, 1, 20);
( %o4) 2870
Tambien podemos utilizar float o numer para pedirle al programa que nos escriba el valor numerico
(%i5) sum(1/n^2, n, 1, 1000),float;
( %o5) 1,643934566681561
Con las funciones simpsum o simplify sum es posible que el programa realice la suma simbolica.
(%i6) sum(n^2, n, 1, N),simpsum;
( %o6)2N3 + 3N2 +N
6(%i7) simplify_sum(sum(n^2, n, 1, N));
( %o7)2N3 + 3N2 +N
6
Con este ultimo comando podemos escribir la expresion de la sumatoria de manera mas elegante.
(%i8) sum(n^2, n, 1, N)=simplify_sum(sum(n^2, n, 1, N));
( %o8)
N∑n=1
n2 =2N3 + 3N2 +N
6
Consideremos las siguientes series infinitas:
(%i9) sum(x^n/n!, n, 0, inf)=simplify_sum(sum(x^n/n!, n, 0, inf));
69

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
( %o9)
∞∑n=0
xn
n!= ex
(%i10)sum(1/n^2, n, 1, inf)=simplify_sum(sum(1/n^2, n, 1, inf));
( %o10)
∞∑n=1
1
n2=π2
6
Podemos ahorrarnos el estar escribiendo el termino enesimo varias veces si definimos la funcion f = f(n)en primer lugar.
(%i11)f:(-1)^(n-1)/n$ sum(f, n, 1,inf)=simplify_sum(sum(f, n, 1,inf));
( %o11)
∞∑n=1
(−1)n−1
n= log(2)
En el siguiente ejemplo el programa no podra encontrar la serie de manera simbolica, pero como comen-tamos anteriormente, podemos evaluar la serie para algunos valores de N . En este caso, para N >10.000 elconsumo en tiempo de calculo para la computadora comienza a notarse.
(%i12)f:log(n)/n^2;
( %o12)log(n)
n2
(%i13)sum(f, n, 1,inf)=simplify_sum(sum(f, n, 1,inf));
( %o13)
∞∑n=1
log(n)
n2=
∞∑n=1
log(n)
n2
(%i14)sum(f,n,2,10),numer;sum(f,n,2,100),numer;sum(f,n,2,1000),numer;sum(f,n,2,10000),numer;
( %o14) 0,6185026440390787( %o15) 0,8817261267819703( %o16) 0,9296439518465429( %o17) 0,9365272663288963
Este ultimo ejercicio puede ser resuelto de una manera mas eficiente si expresamos la funcion de variablediscreta como una sucesion utilizando la opcion de crear una lista, makelist, para evaluarla.
Primero escribimos la funcion discreta, note que usamos :=
(%i18)g[n]:=log([n])/[n]^2;
( %o18) gn :=log([n])
[n]2
(%i19)makelist(sum(g[n],n,2,N),N,[10,100,1000,10000]),numer;
( %o19) [[0,6185026440390787], [0,8817261267819703], [0,9296439518465429], [0,9365272663288963]]Por lo tanto, hacer calculos con sucesiones es sencillo, veamos algunos ejemplo de sucesiones.Definimos la siguiente sucesion, la de Fibonacci :
(%i20)kill(all)$
(%i1) F[1]:1$ F[2]:1$ F[n]:=F[n-1]+F[n-2];
70
Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
( %o3) Fn := F [n− 1] + F [n− 2]
(%i4) makelist(F[n],n,1,15);
( %o4) [1, 1, 2, 3, 5, 8, 13, 21, 34, 55, 89, 144, 233, 377, 610]
Maxima ya contiene la sucesion de Fibonacci fib(n) en sus librerıas de funciones propias. En este casoaplicaremos la funcion map para evaluar la sucesion en los diferentes valores de su argumento n
(%i5) fib(8);
( %o5) 21
(%i6) map (fib, [ 1, 2, 3, 4, 5, 6, 7, 8, 9, 10]);
( %o6) [1, 1, 2, 3, 5, 8, 13, 21, 34, 55]
Definamos ahora otra sucesion
(%i7) G[n]:=(-1)^n*(1+1/n);
( %o7) Gn := (−1)n(
1 +1
n
)(%i8) makelist(G[n],n,1,15);
( %o8)
[−2,
3
2,−4
3,
5
4,−6
5,
7
6,−8
7,
9
8,−10
9,
11
10,−12
11,
13
12,−14
13,
15
14,−16
15
]Podemos hacer operaciones basicas con sucesiones, como sumarlas
(%i9) S[n]:=F[n]+G[n]; makelist(S[n],n,1,15);
( %o9) Sn := Fn +Gn
( %o10)
[−1,
5
2,
2
3,
17
4,
19
5,
55
6,
83
7,
177
8,
296
9,
561
10,
967
11,
1741
12,
3015
13,
5293
14,
9134
15
]Operaciones combinadas
(%i11)C[n]:=3*F[n]-n*G[n]; makelist(C[n],n,1,15);
( %o11)Cn := 3Fn − n Gn( %o12) [5, 0, 10, 4, 21, 17, 47, 54, 112, 154, 279, 419, 713, 1116, 1846]
Multiplicacion
(%i13)M[n]:=F[n]*G[n]; makelist(M[n],n,1,15);
( %o13)Mn := Fn Gn
( %o14)
[−2,
3
2,−8
3,
15
4,−6,
28
3,−104
7,
189
8,−340
9,
121
2,−1068
11, 156,−3262
13,
5655
14,−1952
3
]Division
(%i15)D[n]:=F[n]/G[n]; makelist(M[n],n,1,15);
71
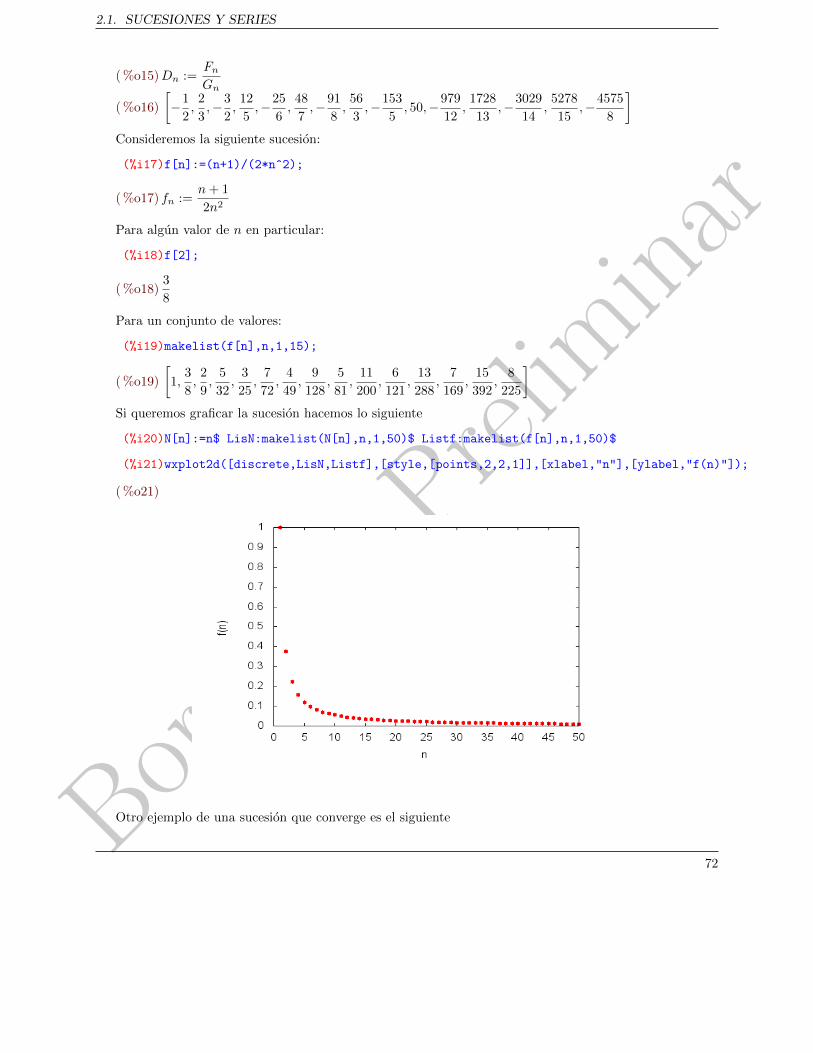
Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
( %o15)Dn :=FnGn
( %o16)
[−1
2,
2
3,−3
2,
12
5,−25
6,
48
7,−91
8,
56
3,−153
5, 50,−979
12,
1728
13,−3029
14,
5278
15,−4575
8
]Consideremos la siguiente sucesion:
(%i17)f[n]:=(n+1)/(2*n^2);
( %o17) fn :=n+ 1
2n2
Para algun valor de n en particular:
(%i18)f[2];
( %o18)3
8
Para un conjunto de valores:
(%i19)makelist(f[n],n,1,15);
( %o19)
[1,
3
8,
2
9,
5
32,
3
25,
7
72,
4
49,
9
128,
5
81,
11
200,
6
121,
13
288,
7
169,
15
392,
8
225
]Si queremos graficar la sucesion hacemos lo siguiente
(%i20)N[n]:=n$ LisN:makelist(N[n],n,1,50)$ Listf:makelist(f[n],n,1,50)$
(%i21)wxplot2d([discrete,LisN,Listf],[style,[points,2,2,1]],[xlabel,"n"],[ylabel,"f(n)"]);
( %o21)
Otro ejemplo de una sucesion que converge es el siguiente
72

Borra
dor Pre
limin
ar
2.1. SUCESIONES Y SERIES
(%i22)g[n]:=1+(-1)^n/(n);
( %o22) gn := 1 +(−1)n
n;
(%i23)Listg:makelist(g[n],n,1,50)$
(%i24)wxplot2d([discrete,LisN,Listg],[style,[points,2,2,4]],[xlabel,"n"],[ylabel,"g(n)"]);
( %o24)
2.1.10. Ejercicios
1. Encuentre la suma de los 100 primeros enteros.
2. Encuentre la distancia total que recorre una pelota que rebota verticalmente y que en cada rebotepierde 2/3 de su energıa cinetica.
3. Encuentre la suma de la serie S = 2 + 52 + 8
4 + 118 + · · · .
4. Demuestre que
a)∞∑n=1
1
n(n+ 1)= 1
b)∞∑n=1
1
(2n− 1)(2n+ 1)=
1
2
5. Determine el limite de las siguientes sucesiones cuando n→∞.
a) un = nn+1
73

Borra
dor Pre
limin
ar
2.2. CRITERIOS DE CONVERGENCIA
b) un = 11+n2
c) un = n2
1+n
d) un = (an+b)2
cn2+d
6. Muestre que sN = 1 + 23 + 33 + · · ·+N3 =∑Nn=1 n
3 =(∑N
n=1 n)2
= N2(N+1)2
4 .
7. Demuestre que para |x| < 1
a)∑∞n=1 nx
n = x(1−x)2
b)∑∞n=1 n
2xn = x2+x(1−x)3
c)∑∞n=1 n
3xn = x3+4x2+x(1−x)4
d)∑∞n=1 n
4xn = x4+11x3+11x2+x(1−x)5
8. Demuestre que:
lımn→∞
[n∑k=1
1
k− ln (n+ 1)
]= lımn→∞
[n∑k=1
1
k− ln (n)
].
2.2. Criterios de convergencia
La pregunta que nos planteamos es la siguiente: Si hacemos que N → ∞ entonces ¿la suma∑Nk=1 ak,
tiene un lımite? A pesar de que solo podremos calcular la suma de algunas series, existen algunas formasde averiguarlo. Es decir, en la mayorıa de los casos nos sera imposible y nos tendremos que conformar consaber si convergen o no, o peor aun, si una suma parcial converge sin poder calcular el valor de esa suma.
Los terminos de una serie pueden ser positivos, negativos o numeros complejos y las series pueden conver-ger (decrecer o crecer hacia un valor finito) no converger (incrementar o decrecer indefinidamente) u oscilar.Existe una serie de criterios y teoremas de aplicacion general que expondremos a continuacion.
2.2.1. Convergencia absoluta o condicional
Para estudiar la convergencia de una serie infinita dada,∑ai veremos que siempre podremos asociarle
otra de la forma∑|ai|, es decir, la serie de valores absolutos, con lo cual garantizamos la positividad (y que
sean numeros reales) de los terminos de la serie. Si la serie de los valores absolutos∑|ai| converge, entonces
tambien convergera la serie original∑ai y diremos que esa serie es absolutamente convergente. Sin embargo
si la serie de valores absolutos diverge, no podremos decir que∑ai converja. De hecho, si converge diremos
que es condicionalmente convergente y, con un rearreglo de sus terminos podra converger, diverger u oscilar.
Teorema: Si∑|an| converge, entonces tambien converge
∑an y se tiene que:∣∣∣∣∣
∞∑n=1
an
∣∣∣∣∣ ≤∞∑n=1
|an|
Para una serie de terminos positivos el criterio de convergencia mas intuitivo (necesario pero no suficiente)es que en lımite cuando n→∞ el termino n-esimo tienda a cero. Con lo cual tenemos que si esta condicionno se satisface, la serie diverge.
74

Borra
dor Pre
limin
ar
2.2. CRITERIOS DE CONVERGENCIA
Teorema: Si la serie∑an converge, el termino n-esimo tiende a cero, esto significa que:
lımn→∞
an = 0 .
Notemos que para la serie:∞∑n=1
1
n⇒ lım
n→∞
1
n= 0 ,
sin embargo, como ya vimos anteriormente, esta serie diverge. Esto significa que el teorema suministra unacondicion suficiente para que exista la divergencia de la serie, es decir, si para el termino n-esimo de la seriean no se cumple que tiende a cero cuando n→∞, entonces la serie
∑an diverge.
Una serie que es convergente pero que no es absolutamente convergente es la siguiente
∞∑n=1
(−1)n+1 1
n= 1− 1
2+
1
3− 1
4+ · · · = ln(2)
porque ya vimos que la serie de los valores absolutos asociada a la serie anterior es
∞∑n=1
1
n
la cual diverge.
2.2.2. Criterio de Comparacion
En segundo lugar de simplicidad esta el criterio de comparacion entre un par de series de terminospositivos. Si conocemos el comportamiento de una de ellas comparamos el de la otra. Esto es, suponga queconsideramos dos series: una de prueba
∑∞n=0 an y una serie conocida y convergente (o divergente)
∑∞n=0 an,
entonces
Si
∞∑n=0
an converge y ∀n se tiene que an > an ⇒∞∑n=0
an >∞∑n=0
an ⇒∞∑n=0
an converge
Por otro lado
Si
∞∑n=0
an diverge y ∀n se tiene que 0 6 an 6 an ⇒∞∑n=0
an 6∞∑n=0
an ⇒∞∑n=0
an diverge
Para ilustrar esta estrategia consideremos la siguiente serie:
1
2+
1
3+
1
7+
1
25+ · · · =
∞∑n=1
1
n! + 1
En ese caso la comparamos con una serie conocida
∞∑n=0
1
n!=
1
0!+
1
1!+
1
2!+
1
3!+ · · · = 1 + 1 +
1
2!+
1
3!+ · · ·︸ ︷︷ ︸
e
= 1 + e
y es claro que la serie indicada no es otra cosa que e, con lo cual la serie claramente converge y su suma es1 + e.
75

Borra
dor Pre
limin
ar
2.2. CRITERIOS DE CONVERGENCIA
2.2.3. Criterio de la Raız
Dada una serie de terminos positivos∑∞n=0 an, el criterio de la raız (o tambien de la raız de Cauchy)
puede resumirse en el siguiente par de afirmaciones. Sı:
(an)1n 6 ρ < 1 para un n suficientemente grande y ρ independiente de n ⇒ converge
(an)1n > 1 para un n suficientemente grande y ρ independiente de n ⇒ diverge
(an)1n = 1 para un n suficientemente grande y ρ independiente de n ⇒ (?)
Otra forma, mas compacta de expresarlo serıa
Sı ρ = lımn→∞
(an)1n entonces:
ρ < 1 ⇒ converge
ρ > 1 ⇒ diverge
ρ = 1 ⇒ (?)
Es facil ver que si utilizamos el criterio de comparacion, entonces
(an)1n 6 ρ ⇒ an 6 ρ
n ⇒
cuando ρ < 1 la serie converge
cuando ρ > 1 la serie diverge
Dada la siguiente serie:∞∑n=0
[n
n+ 1
]n2
,
por lo tanto:
(an)1n =
[n
n+ 1
]n=
1(1 + 1
n
)n ⇒ ρ = lımn→∞
1(1 + 1
n
)n =1
e< 1 .
La serie converge.
2.2.4. Criterio de d’Alembert
Dada una serie de terminos positivos∑∞n=0 an, el criterio de d’Alembert5 o tambien llamado criterio del
cociente, compara el valor relativo de un termino de la serie con el que le precede. Este criterio se resumetambien facilmente
Si ρ = lımn→∞
an+1
anentonces:
ρ < 1 ⇒ converge
ρ > 1 ⇒ diverge
ρ = 1 ⇒ indeterminado
5Jean Le Rond d’Alembert Parıs, Francia 1717 - 1783. Matematico frances pionero en el estudio de las ecuacionesdiferenciales y su utilizacion en la Fısica, en particular en el estudio de los fluıdos. Mas detalles en http://es.wikipedia.org/
wiki/Jean_Le_Rond_d’Alembert
76

Borra
dor Pre
limin
ar
2.2. CRITERIOS DE CONVERGENCIA
Notese que si
ρ < 1 ⇒ ρ < x < 1 ⇒ an+1
an< x ⇒ an+1 = anx .
Entonces para un N < n, pero tambien suficientemente grande, tendremos que los terminos de la serie apartir de ese N seran
aN + aN+1 + aN+2 + aN+3 · · · = aN + xaN + x2aN + x3aN · · · = aN(1 + x+ x2 + x3 + x4 · · ·
)y que no es otra cosa que una serie geometrica con razon x < 1 y por consiguiente converge. Es claro que unargumento similar se puede utilizar para probar la divergencia.
Un ejemplo inmediato lo constituye la serie
1
2+
1
2+
3
8+
1
4+
5
32+ · · · =
∞∑n=1
n
2n⇒
n+12n+1
n2n
=1
2
n+ 1
n=
1
2
(1 +
1
n
),
ρ = lımn→∞
[1
2
(1 +
1
n
)]=
1
2< 1 ,
con lo cual tiene que converger.
2.2.5. Criterio de la Integral de Maclaurin
El criterio de la Integral de Maclaurin6 es otro criterio de comparacion, pero esta vez se compara la seriecon una integral. Ası supondremos que existe una funcion f(x) continua y monotonamente decreciente paraun valor de x > x0 y que, adicionalmente, se cumple que para algun valor entero x = n el valor de la funcion
es igual a un termino de la serie, esto es, f(n) = an. Entonces se tendra que si el lımite lımN→∞∫ N
dx f(x)existe y es finito, entonces
∑∞n=1 an converge. Por el contrario si el lımite no existe o es infinito, entonces
diverge.La idea de este criterio es comparar la integral de f(x) (el area bajo la curva) con la suma de rectangulos
que representa la serie. Entonces, la suma parcial
si =
i∑n=1
an ≡i∑
n=1
f(n) .
Pero:si >
∫ i+1
1dx f(x)
si − a1 <∫ i
1dx f(x)
⇒∫ i+1
1
dx f(x) ≤ si ≤∫ i
1
dx f(x) + a1
donde a1 = f(1), con lo cual, al hacer i → ∞ tendremos que si el lımite de la integral existe, entonces laserie
∑∞n=1 an converge. ∫ ∞
1
dx f(x) ≤∞∑n=1
an ≤∫ ∞
1
dx f(x) + a1
Un ejemplo inmediato podrıa ser determinar si la siguiente serie converge
∞∑n=1
1(n− 3
2
)2 .6Colin Maclaurin 1698, Argyllshire, Escocia - 1746 Edinburgo, Escocia. Matematico escoces quien escribio el Tratado de
los Fluxiones el primer tratado que expuso de una manera sistematica y rigurosa el calculo diferencial ideado por Newton. Estetratado fue como respuesta a la crıtica de Berkeley sobre la falta de rigurosidad de los metodos Newton.
77
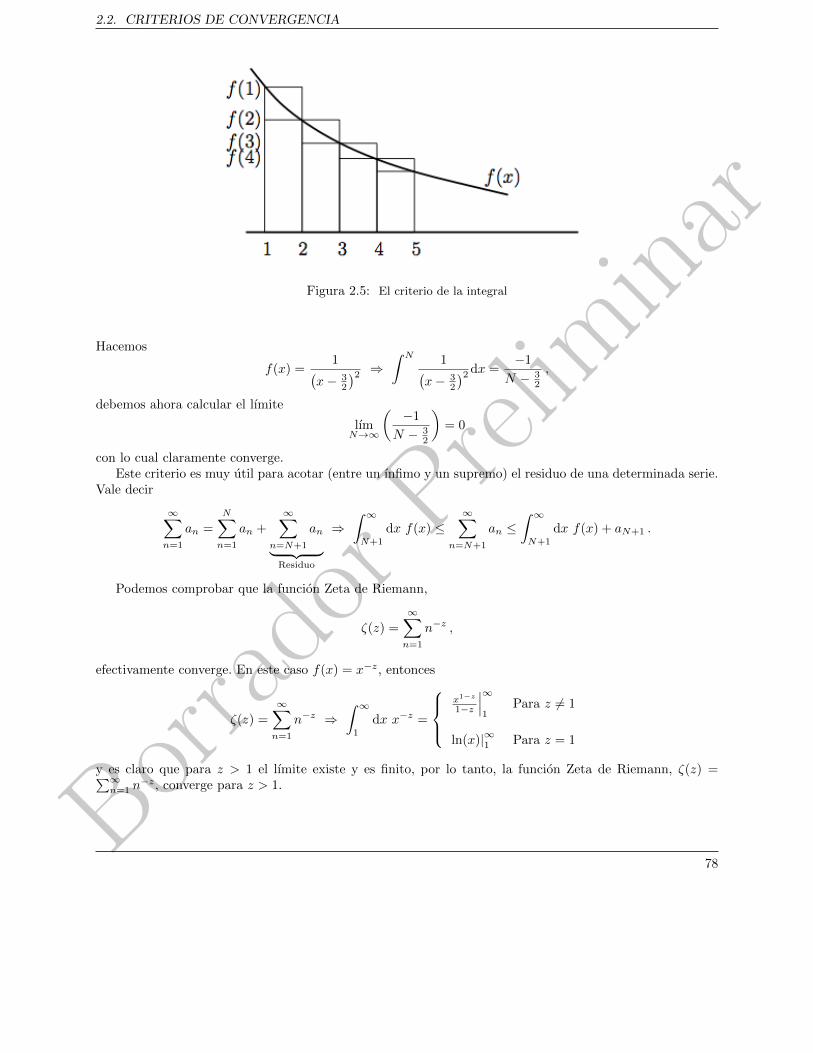
Borra
dor Pre
limin
ar
2.2. CRITERIOS DE CONVERGENCIA
Figura 2.5: El criterio de la integral
Hacemos
f(x) =1(
x− 32
)2 ⇒ ∫ N 1(x− 3
2
)2 dx =−1
N − 32
,
debemos ahora calcular el lımite
lımN→∞
(−1
N − 32
)= 0
con lo cual claramente converge.Este criterio es muy util para acotar (entre un ınfimo y un supremo) el residuo de una determinada serie.
Vale decir
∞∑n=1
an =
N∑n=1
an +
∞∑n=N+1
an︸ ︷︷ ︸Residuo
⇒∫ ∞N+1
dx f(x) ≤∞∑
n=N+1
an ≤∫ ∞N+1
dx f(x) + aN+1 .
Podemos comprobar que la funcion Zeta de Riemann,
ζ(z) =
∞∑n=1
n−z ,
efectivamente converge. En este caso f(x) = x−z, entonces
ζ(z) =
∞∑n=1
n−z ⇒∫ ∞
1
dx x−z =
x1−z
1−z
∣∣∣∞1
Para z 6= 1
ln(x)|∞1 Para z = 1
y es claro que para z > 1 el lımite existe y es finito, por lo tanto, la funcion Zeta de Riemann, ζ(z) =∑∞n=1 n
−z, converge para z > 1.
78

Borra
dor Pre
limin
ar
2.2. CRITERIOS DE CONVERGENCIA
2.2.6. Series alternantes y convergencia condicional
Hasta ahora todos los criterios que analizamos eran para una serie de terminos positivos, por lo cual todosesos criterios nos llevaban al concepto de series absolutamente convergente. Esto es, si
∑∞n=0 |an| converge,
entonces∑∞n=0 an tambien converge. Sin embargo, muchas veces nos tendremos que conformar con que una
serie sea simplemente convergente y no requerir que sea absolutamente convergente. Este es el caso de lasseries alternantes. Series en las cuales se alternan terminos positivos y negativos:
a1 − a2 + a3 − a4 + a5 − a6 + · · ·+ a2n−1 − a2n + · · · =∞∑n=1
(−1)n+1n con an ≥ 0 .
Entonces, si la serie es monotona decreciente para un n suficientemente grande tenemos lo que se denominael Criterio de Leibniz:
∞∑n=1
(−1)n+1an converge, si:
an > an−1 ∀ n > N
∧
an → 0 cuando n→∞
De otro modo la serie oscilara.Estas condiciones son faciles de ver si reorganizamos la serie de los primeros 2m terminos, a partir de un
determinado N par y N > n, entonces
s2m = (aN − aN−1) + (aN−2 − aN−3) + · · ·+ (aN+2m−2 − aN+2m−1) ,
donde todos los parentesis son positivos, con lo cual s2m > 0 y se incrementa al incrementar m. Ahora bien,si rearreglamos la serie tendremos que
s2m = aN − (aN−1 − aN−2)− (aN−3 − aN−4) + · · · − (aN+2m−1 − aN+2m−2)− aN+2m−1 ,
donde, otra vez los parentesis son positivos y es inmediato comprobar que entonces s2m < an para todo m.Como an → 0 cuando n→∞, la serie alternante necesariamente converge.La series alternantes ya eran conocidas desde hace mucho tiempo, como por ejemplo la serie
∞∑n=1
an = x− x2
2+x3
3− x4
4+ · · ·+ (−1)n−1x
n
n+ · · · .
Esta serie converge y su suma es ln(1 + x) para −1 < x ≤ 1. Para x positivo es una serie alternante y enel caso particular de x = 1 se tiene:
1− 1
2+
1
3− 1
4+ · · ·+ (−1)n−1
(1
n
)+ · · · = ln(2) .
Otra relacion interesante es:
1− 1
3+
1
5− 1
7+ · · ·+ (−1)n−1
(1
2n− 1
)+ · · · = π
4.
Consideremos ahora el siguiente teorema:
79

Borra
dor Pre
limin
ar
2.2. CRITERIOS DE CONVERGENCIA
Teorema: Si {an} es una sucesion monotona decreciente con lımite igual a cero, la serie alternante
∞∑n=1
(−1)n−1an ,
converge.
Si S es su suma y sn su suma parcial n-esima, se tiene que:
0 < (−1)n (S − sn) < an+1 para n ≥ 1 .
Consideremos la siguiente serie
∞∑n=1
(−1)n−1
(1
n
)= 1− 1
2+
1
3− 1
4+ · · · .
Sabemos que 1/n es una sucesion monotona decreciente y que:
lımn→∞
1
n= 0 ,
por lo tanto, de acuerdo al teorema anterior la serie converge; como ya hemos visto.Consideremos ahora la serie
a2n−1 =1
2y a2n =
∫ n+1
n
dx
xpara n = 1, 2, 3, ... .
Por otro lado, se tiene tambien que:lımn→∞
an = 0 ,
y que an es monotona decreciente, por lo tanto la serie
∞∑n=1
(−1)n−1an ,
converge.
2.2.7. Ejemplos
80

Borra
dor Pre
limin
ar
2.2. CRITERIOS DE CONVERGENCIA
2.2.8. Practicando con Maxima
Demostremos que determinada sucesion converge a partir de la definicion de lımite. Consideremos lasiguiente sucesion de numero reales:
an =n− 1
n+ 2
convergente y de lımite L = 1.Aplicaremos la definicion de lımite, es decir, utilizaremos la condicion para la existencia de un lımite L,
que para cada ε > 0 existe un numero N = N(ε) ∈ N tal que:
|L− an| < ε para n > N ⇒ |sn − am| < ε para, todo n,m > N .
Consideremos la siguiente sucesion:
an =n− 1
n+ 2.
(%i1) a[n]:=(n-1)/(n+2);
( %o1) an :=n− 1
n+ 2
Calculemos |L− an|, con L = 1
(%i2) I1:(factor(1-a[n]));
( %o2)3
n+ 2
Entonces 3n+2 < ε para todo n > N . Lo que implica que
ε− 3
n+ 2> 0
(%i3) I2:factor(epsilon-I1);
( %o3)ε n+ 2 ε− 3
n+ 2
Lo que tenemos entonces es:ε n+ 2 ε− 3
n+ 2> 0 ,
para todo n > N . Despejemos n de la desigualdad.
(%i4) sol:solve(I2=0,n);
( %o4)
[n = −2 ε− 3
ε
](%i5) I3:rhs(sol[1]);
( %o5) − 2 ε− 3
ε
81

Borra
dor Pre
limin
ar
2.2. CRITERIOS DE CONVERGENCIA
Por lo tanto
n > −2 ε− 3
ε.
Entonces, dado un ε, y por muy pequeno que este sea, se tiene
(%i6) epsilon:0.01; N:I3,numer; assume(n>N)$ is(I1<epsilon);
( %o6) 0.01( %o7) 298.0( %o8) true
(%i9) epsilon:0.0001; N:I3,numer; assume(n>N)$ is(I1<epsilon);
( %o9) 1.0× 10−4
( %o10) 29998.0( %o11) true
(%i12)epsilon:0.000001; N:I3,numer; assume(n>N)$ is(I1<epsilon);
( %o12) 9.999999999999999× 10−7
( %o13) 2999998.0( %o14) true
Este procedimiento que podemos seguir haciendo para ε cada vez mas pequeno, pero siempre con ε > 0.La condicion se seguira cumpliendo para un N que se incrementara a medida que ε se tiende a cero.
Es claro que tambien podemos escribir
(%i15)’limit(a[n],n,inf)=limit(a[n],n,inf);
( %o15) lımn→∞
n− 1
n+ 2= 1
> restart:
> assume(p>1):
> Limit(Int((x)∧(-p),x=1..infinity),x=infinity)=
limit(int((x)∧(-p),x=1..infinity),x=infinity);
> assume(p<=1):
> Limit(Int((x)∧(-p),x=1..infinity),x=infinity)=
limit(int((x)∧(-p),x=1..infinity),x=infinity);
2.2.9. Ejercicios
1. Encuentre el radio de convergencia de las siguientes series
a)∞∑n=0
n2xn
b)∞∑n=0
2n
n!xn
82

Borra
dor Pre
limin
ar
2.3. SERIES DE FUNCIONES
c)∞∑n=0
5n
n3/2xn
d)∞∑n=0
n4
5nxn
e)∞∑n=0
xn
[3 + (−1)n]n
f )∞∑n=0
xn
2n+(−1)n
2.3. Series de funciones
La idea de series se puede ampliar al permitir que sus terminos sean funcion de alguna variable (una ovarias), esto es an = an(x). Esta extension del concepto se serie, trae como consecuencia que ahora las sumasparciales dependen de x
sn(x) =
n∑k=0
ak(x) = a0(x) + a1(x) + a2(x) + · · · ,
con lo cual, si
lımn→∞
sn(x) = S(x) =
∞∑k=1
ak(x) ,
entonces, el comportamiento de las serie tambien dependera de la variable.La convergencia de la serie podra ser posible para algunos valores de x y no para otros. El punto central
con las series de funciones f(x) complicadas es la de tratar de construir funciones como una serie de terminos,ak(x), mas simples. Ası, esas sumas parciales fn(x) constituiran la funcion deseada
f(x) =
∞∑k=1
ak(x) = lımn→∞
n∑k=1
ak(x) .
Estaremos interesados en aquellas funciones a las cuales converjan las sumas parciales de una serie. Parafijar conceptos, comenzaremos por las series de funciones mas comunes: Las Series de Potencias.
2.3.1. Series de potencias
Asociaremos una serie de potencias an = cnxn a un polinomio de grado infinito.
P (x) = c0 + c1x+ c2x2 + c3x
3 + c4x4 + · · · =
∞∑n=0
cnxn , o tambien P (x− x0) =
∞∑n=0
cn (x− x0)n.
Esta asociacion tiene la ventaja de permitirnos intuir algunos comportamientos de la serie para algunosvalores de x. Los coeficientes cn son numeros independientes de x. Pero, mas aun, estas series pueden serseries de potencias de numero complejos. Vale decir,
∑∞n=0 cnz
n con z = x+ iy.
83

Borra
dor Pre
limin
ar
2.3. SERIES DE FUNCIONES
2.3.2. Convergencia de una serie de potencias
Se pueden utilizar todos los criterios que hemos desarrollado anteriormente. Ası una serie de potencias∑∞n=0 an (x− x0)
nconverge en un punto x0 si el lımite
lımn→∞
∞∑n=0
an (x− x0)n
existe, para x = x0, para todo x o para algunos x.Una serie de potencias
∑∞n=0 cn (x− x0)
nconvergera absolutamente sı
lımn→∞
n∑j=0
∣∣∣cj (x− x0)j∣∣∣ = ρ , existe.
Tambien se cumplira el criterio de convergencia absoluta. Esto es, si∑∞n=0 |cn (x− x0)
n| converge, en-tonces,
∑∞n=0 cn (x− x0)
nconverge, pero el inverso no es siempre verdad.
Los criterios mas populares para evaluar la convergencia, se seguiran cumpliendo. Ası el criterio ded’Alembert y el de la raız de Cauchy se podran reescribir como:
ρ(x) =
lımn→∞
∣∣∣∣∣cn+1 (x− x0)n+1
cn (x− x0)n
∣∣∣∣∣lımn→∞
n√cn (x− x0)
n
⇒ρ(x) < 1 ⇒ converge
ρ(x) > 1 ⇒ diverge
Solo que ahora es bueno enfatizar que ρ = ρ(x) dependera de la variable. Llamaremos, de ahora enadelante a este lımite el radio o entorno de convergencia, el cual delimitara los valores de x para que la seriede potencias converja.
Consideremos el siguiente ejemplo, dada la serie
1 + x+x2
2+x3
6+ · · ·+ xn
n!+ · · · =
∞∑n=0
xn
n!,
por lo tanto
lımn→∞
an+1
an= lımn→∞
∣∣∣∣∣∣∣∣xn+1
(n+ 1)!xn
n!
∣∣∣∣∣∣∣∣ = lımn→∞
∣∣∣∣ x
n+ 1
∣∣∣∣ = 0 ,
es decir,
ρ(x) = lımn→∞
an+1
an= 0 ,
con lo cual la serie converge para todo valor de x.Para puntualizar:
Si una serie converge en x = x1, convergera absolutamente para |x− x0| < |x1 − x0| y divergera para|x− x0| > |x1 − x0|.
Se llama radio de convergencia, ρ = ρ(x) a aquella cantidad tal que la serie∑∞n=0 an (x− x0)
nconverge
para |x− x0| < ρ y diverge para |x− x0| > ρ.
Una serie∑∞n=0 an (x− x0)
nque converge unicamente para x = x0 tendra un radio de convergencia
ρ = 0, mientras que una que converja para todo x tendra un radio de convergencia ρ =∞.
84
Borra
dor Pre
limin
ar
2.3. SERIES DE FUNCIONES
2.3.3. Convergencia uniforme
Se puede refrasear el criterio de convergencia de Cauchy que vimos anteriormente. Para cualquier valorde ε > 0, tan pequeno como uno quiera, siempre existira un numero N independiente de x, con a ≤ x ≤ b,tal que:
si S(x) = lımn→∞
sn(x) =
∞∑n=1
an(x) ⇒ |S(x)− sn(x)| < ε ∀ x ∈ [a, b] ∧ n ≥ N.
Con ello es inmediato identificar el error que se comete cuando se corta la serie en un N suficientementegrande
S(x) =
N∑n=1
an(x)︸ ︷︷ ︸sn(x)
+
∞∑n=N+1
an(x)︸ ︷︷ ︸≈ε
Hay que resaltar el hecho de que las suma de funciones continuas an(x) no necesariamente habra deser continua, el concepto de convergencia uniforme busca garantizar que esa suma de funciones continuastambien sea continua.
Recordemos la idea de continuidad de una funcion. Una funcion sera continua si sus lımites por la derechay por izquierda coinciden
lımt→x±
f(t) = f(x)
Por otro lado, a partir del hecho de quef(x) = lım
n→∞fn(x)
es valido preguntarse si el lımite de la sucesion de sumas parciales es continua, esto es:
lımt→x±
[lımn→∞
fn(x)]
?= lımn→∞
[lımt→x±
fn(x)
].
Es decir, al suponer que la suma de terminos continuos tiende a una funcion continua estamos suponiendoque podemos intercambiar los lımites, pero eso no es siempre cierto. Consideremos el caso (extremo)
fn = n2x(1− x2
)ncon: 0 ≤ x ≤ 1 y n = 1, 2, 3, . . .
entonces:
lımn→∞
fn = 0 ⇒∫ 1
0
dx[
lımn→∞
fn(x)]
= 0∫ 1
0
dx fn(x) =n2
2(n+ 1)⇒ lım
n→∞
∫ 1
0
dx fn →∞
Claramente no se pueden intercambiar los lımites.Por ejemplo, sea la serie
f(x) =
∞∑k=0
ak(x) = x2 +x2
1 + x2+
x2
(1 + x2)2 +
x2
(1 + x2)3 + · · ·+ x2
(1 + x2)k
+ · · · ,
de manera que
ak(x) =x2
(1 + x2)k.
85

Borra
dor Pre
limin
ar
2.3. SERIES DE FUNCIONES
Comoan+1(x)
an(x)=
1
1 + x2< 1 ∀ x 6= 0 ,
la serie es absolutamente convergente ∀x (x 6= 0).Sin embargo, tenemos que f(0) = 0. El termino n-esimo para la suma parcial es
fn(x) = x2n−1∑k=0
1
(1 + x2)k
= 1 + x2 − 1
(1 + x2)n−1 = 1 + x2 − 1 + x2
(1 + x2)n ,
como 1 + x2 > 1, entonces:lımn→∞
fn(x) = 1 + x2 , x 6= 0 .
pero hemos establecido que f(0) = 0 de manera que f(x) no es continua.Para el caso de series de funciones, existen un par de criterios que identifican la convergencia uniforme. El
criterio Mayorante de Weierstrass7 y el criterio de Abel8. Estos criterios desarrollan la nocion de convergenciauniforme la cual es necesaria para asegurar el intercambio en los lımites.
2.3.4. Criterio Mayorante de Weierstrass
La idea de convergencia uniforme se introduce para garantizar que la sumas infinitas de un conjunto defunciones sea continua.
Una condicion suficiente, pero no necesaria, para que la serie
a1(x) + a2(x) + a3(x) + · · ·+ an(x) + · · · =∞∑n=1
an(x)
sea uniformemente convergente es dada por la condicion de Weierstrass:Si encontramos una serie convergente de numeros positivos
M =
∞∑j=1
Mj con Mi ≥ |ai(x)| ∀ x ∈ [a, b] entonces la serie
∞∑n=1
an(x)
es uniformemente convergente.La demostracion se obtiene a partir de la definicion misma de convergencia. Si
∑∞j=1Mj converge, entonces
para n+ 1 ≥ N se tiene
∞∑j=n+1
Mj < ε y como |ai(x)| ≤Mi ⇒∞∑
j=n+1
|ai(x)| < ε ⇒ |S(x)− sn(x)| ≡∞∑
j=n+1
|ai(x)| < ε
con la cual la serie∑∞n=1 an(x) sera uniformemente convergente para todo x ∈ [a, b].
Ahora bien, como consideramos los Mi ≥ 0. La serie en cuestion tambien sera absolutamente convergente.Otra vez, los criterios de convergencia absoluta y, en este caso, de convergencia uniforme, no son consecuenciauno del otro, ni estan relacionados.
7Karl Theodor Wilhelm Weierstrass (1815 - 1897). Matematico Aleman con importantes contribuciones al analisiscomplejo mediante la utilizacion de series.
8Niels Henrik Abel (1802-1829). Matematico Noruego. Su primera mayor aportacion fue la prueba de la imposibilidad deresolucion algebraica de la ecuacion quıntica mediante radicales.
86

Borra
dor Pre
limin
ar
2.3. SERIES DE FUNCIONES
Las series∞∑n=1
(−1)n
n+ x2para −∞ < x <∞ ∧
∞∑n=1
(−1)n−1xn
npara 0 ≤ x ≤ 1
convergen uniformemente pero NO absolutamente.Sin embargo, en el intervalo 0 ≤ x ≤ 1 la serie
∑∞j=0(1 − x)xj converge absolutamente pero no unifor-
memente, por cuanto tiene una discontinuidad. Se puede demostrar que
∞∑j=0
(1− x)xj =
{1 , 0 ≤ x < 10 , x = 1
con lo cual se puede concluir que una serie arbitraria f(x) =∑∞j=1 ai(x) no podra converger uniformemente
en intervalos en los cuales la funcion f(x) sea discontinua.Por ejemplo, la serie
f(x) = cos(x) +1
22cos2(x) +
1
32cos3(x) + · · ·
es uniformemente convergente, porque al tomar Mk = 1/k2 la serie
∞∑k=1
1
k2,
converge a π2/6.
2.3.5. Criterio de Abel
El criterio de Abel se puede resumir de la siguiente manera. Sı
f(x) =
∞∑i=0
ai(x) ∧ ai(x) = ci(x)fi(x) ,
donde∑∞i=0 ci(x) converge, es decir:
lımn→∞
n∑i=0
ci(x) = S ,
entonces la serie converge uniformemente en [a, b].Para que se cumpla el criterio de Abel, fn(x) tiene que estar acotada (0 ≤ fn ≤ M ∀ n) y tiene que ser
monotonamente decreciente en el intervalo en el cual este definida, fn+1(x) ≤ fn(x) con x ∈ [a, b].En resumen, si la serie
f(x) = a1(x) + a2(x) + a3(x) + · · ·+ an(x) + · · · =∞∑n=1
an(x)
es uniformemente convergente para a ≤ x ≤ b, entonces es posible integrar y diferenciar termino por termino.
df
dx=
∞∑k=1
dakdx∫ β
α
f(x) dx =
∞∑k=1
∫ β
α
ak(x) dx ,
87

Borra
dor Pre
limin
ar
2.3. SERIES DE FUNCIONES
donde a ≤ α < β ≤ b.La convergencia uniforme no implica convergencia absoluta y convergencia absoluta no implica conver-
gencia uniforme, como se vio anteriormente, la serie
∞∑n=0
x2
(1 + x2)n ,
es absolutamente convergente pero no uniformemente convergente cerca de x = 0.Las series absolutamente convergentes tienen la propiedad de comportarse como las series finitas, los
terminos pueden ser multiplicados e intercambiado el orden de la suma. Las series uniformemente conver-gentes se comportan como las series finitas donde la serie es continua si cada termino de la serie tambien loes.
La serie∞∑n=1
(−1)n−1
n+ x2=
1
1 + x2− 1
2 + x2+
1
3 + x2+ · · ·
es unicamente condicionalmente convergente, pero, es tambien uniformemente convergente.
2.3.6. Nota sobre el algebra de series de potencias
El algebra elemental de series se puede reconsiderar a la luz de las series de potencias. De esta formarecordamos que los ındices en las series son mudos
∞∑n=1
an n (x− x0)n−1
=
∞∑j=1
aj j (x− x0)j−1
=
∞∑k=0
ak+1 (k + 1) (x− x0)k
en la ultima sumatoria hemos hecho k = j − 1, por lo cual j = k + 1.Las series se igualan
∞∑n=0
bn (x− x0)n
=
∞∑n=1
an n (x− x0)n−1
∞∑n=0
bn (x− x0)n
=
∞∑k=0
ak+1 (k + 1) (x− x0)k
=
∞∑n=0
an+1 (n+ 1) (x− x0)n
por lo cualbn = an+1 (n+ 1) .
Si la igualdad hubiera sido
∞∑n=0
an (x− x0)n
=
∞∑n=1
an n (x− x0)n−1
=
∞∑n=0
an+1 (n+ 1) (x− x0)n
=⇒ an+1 =an
(n+ 1)
Las series se suman
∞∑n=0
an (x− x0)n
+
∞∑k=2
bk (x− x0)k
= a0 + a1 (x− x0) +
∞∑n=2
(an + bn) (x− x0)n
88

Borra
dor Pre
limin
ar
2.3. SERIES DE FUNCIONES
o tambien∞∑n=0
an (x− x0)n
+
∞∑k=0
bk+2 (x− x0)k+2
= a0 + a1 (x− x0) +
∞∑n=2
(an + bn) (x− x0)n
=
∞∑n=0
(an + cn−2) (x− x0)n,
y en este ultimo caso c−2 = c−1 = 0 y ci = bi+2.Notese como en los dos ejemplos anteriores hemos hecho coincidir los dos ındices de la sumatoria desde
el comienzo.La series tambien se multiplican, esto es[ ∞∑
n=0
an (x− x0)n
][ ∞∑n=0
bn (x− x0)n
]=
∞∑n=0
cn (x− x0)n
concn = a0bn + a1bn−1 + a2bn−2 + · · ·+ ajbn−j + · · ·+ an−2b2 + an−1b1 + anb0
Si alguna de las series de potencias es absolutamente convergente, entonces su multiplicacion con otra, seraabsolutamente convergente.
Pero tambien las series de potencias se ¡invierten! y para ello utilizamos todo lo visto anteriormenteveamos. Supongamos que se tiene una serie del tipo
y − y0 = a0 + a1 (x− x0) + a2 (x− x0)2
+ · · ·+ an (x− x0)n
+ · · · =∞∑n=0
an (x− x0)n
Es decir tenemos y−y0 expresado en terminos de una serie de potencias de (x− x0)n
entonces, igual podremosplantearnos invertir el proceso, vale decir, expresar (x− x0) en terminos de potencias (y − y0)
nEsto es
x− x0 =
∞∑n=0
bn (y − y0)n ⇒ x− x0 =
∞∑k=0
bk
∞∑j=0
aj (x− x0)j
k
y al igualar terminos con la misma potencia, despejamos los coeficientes bn en terminos de los an, de formaque
b1 =1
a1
b2 =− a2
(a1)3
b3 =2(a2)2 − a1a3
(a1)5
b4 =5a1a2a3 − a2
1a4 − 5a32
(a1)7
... =...
Igualmente, si una serie f(x) =∑∞n=0 an(x− x0) =
∑∞n=0 cn (x− x0)
nconverge para un entorno −R ≤
x ≤ R entonces por el criterio de Mayorante de Weierstrass, convergera absoluta y uniformemente para−S ≤ x ≤ S con 0 ≤ S ≤ R.
Mas aun, el criterio de Abel nos garantiza las siguientes propiedades:
89

Borra
dor Pre
limin
ar
2.3. SERIES DE FUNCIONES
Dado que todos los terminos an(x) = cn (x− x0)n
son funciones continuas de x y f(x) =∑∞n=0 cn (x− x0)
n
converge uniformemente para un entorno −S ≤ x ≤ S, entonces la funcion f(x) es continua en el in-tervalo de convergencia.
Si los terminos an(x) = cn (x− x0)n
son funciones continuas de x, entonces la serie puede ser derivadatermino a termino
d
dx
[ ∞∑n=0
cn (x− x0)n
]=
∞∑n=1
cn n (x− x0)n−1
(notese como cambia el comienzo de la serie) y convergera a
∞∑n=1
cn n (x− x0)n−1 → df(x)
dxan(x) ∧ d
dxan(x) continuas ∧
∞∑n=0
an(x) ,
converge uniformemente en [a, b].
De igual manera las series pueden ser integradas termino a termino∫ b
a
dx f(x) =
∫ b
a
dx
∞∑n=0
cn (x− x0)n
=
∞∑n=0
∫ b
a
dx cn (x− x0)n
=
∞∑n=0
cnn+ 1
(x− x0)n+1
.
2.3.7. Ejemplos
1. Otro caso ocurre cuando consideramos la siguiente serie de potencias:
∞∑n=1
(−1)n+1
n (x− 2)n
= x− 2− 2 (x− 2)2
+ 3 (x− 2)3 − 4 (x− 2)
4+ · · · ,
por lo tanto:
ρ(x) = lımn→∞
∣∣∣∣∣ (−1)n+2
(n+ 1) (x− 2)n+1
(−1)n+1
n (x− 2)n
∣∣∣∣∣ = |x− 2| lımn→∞
∣∣∣∣n+ 1
n
∣∣∣∣ = |x− 2|
lo que implica que la serie:
converge si: |x− 2| < 1⇒ 1 < x < 3 y diverge si: |x− 2| > 1 .
Es decir, la serie∑∞n=1 (−1)
n+1n (x− 2)
nconvergera unicamente para 1 < x < 3. Para otros valores
de x, diverge.
2. Dada la serie∞∑n=1
an(x) =
∞∑n=1
x
[(n− 1)x+ 1] [nx+ 1],
cuya suma n-esima parcial es
sn(x) =nx
nx+ 1.
La funcion sn(x) es una funcion continua de x ∀ 0 ≤ x ≤ 1, y para todo n. Por otro lado,
S(x) = lımn→∞
sn(x) = 0 , si x = 0
S(x) = lımn→∞
sn(x) = 1 , si x 6= 0 .
Existe una discontinuidad en x = 0 para S(x) y por lo tanto la condicion (2.3.3) no se cumplira.
90

Borra
dor Pre
limin
ar
2.3. SERIES DE FUNCIONES
2.3.8. Practicando con Maxima
2.3.9. Ejercicios
1. Demuestre que la serie∞∑n=0
(−1)n
n+ x2,
es uniformemente y condicionalmente convergente.
2. Demuestre que la serie∞∑n=1
(−1)nn+ x2
n2,
converge uniformemente, pero no absolutamente.
3. Determine el radio de convergencia de la serie
x
a+ 1+
x2
a+√
2+
x3
a+√
3+ · · ·+ xn
a+√n
+ · · ·
donde a es un numero real y positivo. Determine si la serie es o no uniformemente convergente.
4. Considere la siguiente sucesion
fn(x) =sen(nx)√
n, n = 1, 2, 3, . . .
demuestre que:d
dx
[lımn→∞
fn(x)]6= lımn→∞
d
dxfn(x) ,
5. Discuta la convergencia de las siguientes series
a)
1− 2
3+
3
5− 4
7+ · · ·
b) (a− b
2
)+
(a
3− b
4
)+ · · ·+
(a
2n− 1− b
2n
)+ · · ·
donde a y b son constantes positivas.
6. Utilizando fracciones parciales, demuestre que
a)∞∑k=1
1
(k + 1)(k + 3)(k + 5)=
23
480
b)∞∑k=1
3k − 2
k(k + 1)(k + 2)= 1 .
91

Borra
dor Pre
limin
ar
2.4. SERIE DE TAYLOR
2.4. Serie de Taylor
Para los fısicos el uso apropiado (y frecuente) de la serie Taylor facilita muchos calculos. La idea detrasde este tipo de series es la de la aproximacion de una determinada funcion por una serie de potencias endonde existe una forma sistematica de construir los coeficientes y, dependiendo de el numero de terminosque utilicemos en la serie, tendremos una idea de cuan aproximada es la serie y cuanto es el error que come-temos al desarrollar la serie hasta un determinado termino. Ası supondremos que f = f(x) es una funcion
continua y continuamente diferenciable. Con lo cual, si denotamos df(x)dx = f ′(x), entonces supondremos que
f ′(x), f ′′(x), f ′′′(x), · · · , f (n)(x) estan definidas en el intervalo [a, b].De cursos anteriores se sabe que:∫ a+h
a
dx f ′(x) = f(a+ h)− f(a) ⇒ f(a+ h) = f(a) +
∫ a+h
a
dx f ′(x) ⇒ f(a+ h) ≈ f(a) + hf ′(a) ,
donde hemos supuesto que en intervalo [a, a+ h] la funcion f ′(x) es constante y tiene como valor f ′(a).Ahora bien, esto vale para todo x y para cualquier funcion, por lo tanto se cumple que:
f(x) ≈ f(a) + (x− a)f ′(a) ,
f ′(x) ≈ f ′(a) + (x− a)f ′′(a) ,
f ′′(x) ≈ f ′′(a) + (x− a)f ′′′(a) ,...
...f (n−1)(x) ≈ f (n−1)(a) + (x− a)f (n)(a) .
Con lo cual podemos construir
f(a+ h) = f(a) +
∫ a+h
a
dx f ′(x) ≈ f(a) +
∫ a+h
a
dx [f ′(a) + (x− a)f ′′(a)] ≈ f(a) + hf ′(a) +h2
2f ′′(a) ,
que no es otra cosa que una aproximacion de segundo orden a f(a+ h). En general podemos construir
f(a+ h) = f(a) +
∫ a+h
a
dx f ′(x) = f(a) +
∫ a+h
a
dx
[f ′(a) +
∫ a+h
a
dx f ′′(x)
]
= f(a) + hf ′(a) +
∫ a+h
a
dv
[∫ a+h
a
dx f ′′(x)
]
= f(a) + hf ′(a) +
∫ a+h
a
du
(∫ a+h
a
dv
[f ′′(a) +
∫ a+h
a
dx f ′′′(x)
])
= f(a) + hf ′(a) +h2
2f ′′(a) +
∫ a+h
a
du
(∫ a+h
a
dv
[∫ a+h
a
dx f ′′′(x)
])
y si repetimos ese procedimiento n veces, suponiendo que las derivadas de f(x) existan, tendremos la apro-ximacion n− 1 a la funcion. Esto es
f(a+ h) = f(a) + hf ′(a) +h2
2!f ′′(a) +
h3
3!f ′′′(a) + · · ·+ hn−1
(n− 1)!f (n−1)(a) +Rn
92

Borra
dor Pre
limin
ar
2.4. SERIE DE TAYLOR
y tambien es facil convencerse por inspeccion que el residuo o el error que cometemos en la aproximacionn− 1 viene dado por la integracion enesima de la derivada enesima, vale decir
Rn =
∫ a+h
a
du
∫ a+h
a
dv · · · · · ·︸ ︷︷ ︸n veces
∫ a+h
a
dx f ′′′(x)
y por el Teorema del Valor medio∫ a+h
a
dτg(τ) = hg(ξ) ⇒ Rn =hn
n!f (n)(ξ) con a ≤ ξ ≤ a+ h
Ahora bien, una eleccion astuta del parametro h = x − a nos lleva a la conocida expresion de la serie deTaylor para una funcion de una variable
f(x) = f(a) + (x− a)f ′(a) +(x− a)2
2!f ′′(a) +
(x− a)3
3!f ′′′(a) + · · ·+ (x− a)n−1
(n− 1)!f (n−1)(a) +Rn
y el error vendra dado por
Rn =(x− a)n
n!f (n)(ξ) con a ≤ ξ ≤ a+ h
ası la expansion de Taylor especifica el valor de una funcion en un punto x en terminos de el valor de lafuncion y sus derivadas en un punto de referencia a. La expansion se hace en terminos de potencias de ladiferencia, (x− a), entre el punto que se evalua y el punto de referencia.
Algunas otras formas de expresar la serie de Taylor, serıan
f(x+ h) =
∞∑n=0
hn
n!f (n)(x) =
∞∑n=0
hn dn
dxn
n!f(x) =
∞∑n=0
hnDn
n!f(x) = ehDf(x) donde, D ≡ d
dx
Si el punto de referencia es a = 0 tendremos la serie de Maclaurin
f(x) = f(0) + xf ′(0) +x2
2!f ′′(0) +
x3
3!f ′′′(0) + · · ·+ xn−1
(n− 1)!f (n−1)(0) +Rn
2.4.1. Algunas series de Taylor
Un listado incompleto de las series de Taylor mas utilizadas es:
ex = 1 + x+x2
2!+x3
3!+x4
4!+ · · ·+ xn
n!+ · · · para −∞ < x <∞
sen(x) = x− x3
3!+x5
5!− x7
7!+ · · ·+ (−1)n+1 x2n−1
(2n− 1)!+ · · · para−∞ < x <∞
cos(x) = 1− x2
2!+x4
4!− x6
6!+ · · ·+ (−1)n+1 x2n−2
(2n− 2)!+ · · · para−∞ < x <∞
arctan(x) = x− x3
3+x5
5− x7
7+ · · ·+ (−1)n+1 x2n−1
(2n− 1)+ · · · para− 1 < x < 1
ln(1 + x) = x− x2
2+x3
3− x4
4+ · · ·+ (−1)n+1x
n
n+ · · · para − 1 < x < 1
(1 + x)m = 1 +mx+m(m− 1)x2
2+m(m− 1)(m− 2)
x3
3!+ · · ·+ m!
n!(m− n)!xn + · · · ∀x
93

Borra
dor Pre
limin
ar
2.4. SERIE DE TAYLOR
Si tenemos una funcion y queremos determinar su serie de potencias, es posible que los calculos sesimplifiquen notablemente si utilizamos apropiadamente las series elementales anteriores, por ejemplo:
eαx2+βx = 1 +
(αx2 + βx
)+
(αx2 + βx
)22
+
(αx2 + βx
)33!
+
(αx2 + βx
)44!
+ · · ·
desarrollando los terminos binomiales
eαx2+βx = 1 + β x+
(α+
1
2β2
)x2 +
(β α+
1
6β3
)x3 +
(1
2α2 +
1
2αβ2 +
1
24β4
)x4 + · · ·
Si se quiere hacer el desarrollo alrededor de un punto diferente de x0 = 0, podemos completar cuadrados:
eαx2+βx = eα(x2+βx/α) = eα(x2+βx/α+β2/4α2−β2/4α2) = eα(x2+βx/α+β2/4α2)−β2/4α
= eα(x+β/2α)2−β2/4α = eα(x+β/2α)2
e−β2/4α
= e−β2/4α
[1 + α(x+ β/2α)2 + α2(x+ β/2α)4/2 + · · ·
]y esta es la expansion en series de potencias alrededor del punto x0 = −β/2α.
2.4.2. La expansion binomial
Por su uso frecuente, consideremos el caso de la expansion binomial
(1 + x)m = 1 +mx+m(m− 1)x2
2+m(m− 1)(m− 2)
x3
3!+ · · · =
∞∑n=0
m!
n!(m− n)!xn ,
=
∞∑n=0
(mn
)xn ,
donde el termino
(mn
)se denomina el coeficiente binomial y la serie termina cuando m = n.
Ahora bien, escrito de la forma compacta se sugiere que el exponente m tendrıa que ser entero y positivo.Pero no es ası. La serie explıcita no se restringe a valores enteros y positivos de m. Por ello, la forma compactapero exacta de la expansion binomial es(
1 +x
a
)m= 1 +m
(xa
)+m(m− 1)
2
(xa
)2
+m(m− 1)(m− 2)
3!
(xa
)3
+ · · ·
=
∞∑n=0
Γ(1 +m)
Γ(1 + n)Γ(1 +m− n)
(xa
)n.
Donde hemos utilizado la funcion Γ(x) como la generalizacion del factorial para valores que no se restringena enteros positivos. Notese tambien que si el exponente es negativo,
(1 + x
a
)mtiene una singularidad o un
polo en x = −a.Cuando n es un entero positivo tendremos
n! = Γ(1 + n) =
∫ ∞0
e−t tn dt =
∫ ∞0
e−t+n ln(t) dt
Esta integral, como se puede ver en la figura, nos recuerda la forma de una Gaussiana con un maximoen t = n. Al hacer una expansion alrededor de este punto
f(t) = −t+ n ln(t) = f(n) + (t− n)f ′(n) + (t− n)2f ′′(n)/2 + · · ·= −n+ n ln(n) + 0 + (t− n)2(−n/n2)/2 + · · ·
94

Borra
dor Pre
limin
ar
2.4. SERIE DE TAYLOR
Figura 2.6: La funcion Gamma para n = 5
Si conservamos los terminos hasta segundo orden, la integral puede ser aproximadamente igual a:
n! ∼∫ ∞
0
e−n+n ln(n)−(t−n)2/2n dt = nne−n∫ ∞
0
e−(t−n)2/2n dt
Para valores de n grandes, y esto es lo que se conoce como la aproximacion de Stirling, se tiene:
n! ∼ nne−n∫ ∞−∞
e−(t−n)2/2n dt = nne−n√
2πn
Aquı, el sımbolo ∼ se refiere a un comportamiento asintotico de la funcion Gamma.En la siguiente tabla se muestran, para algunos valores de n, el valor exacto del factorial, el valor por la
formula de Stirling y el cociente entre estos dos valores. Se puede apreciar entonces lo buena que resulta talaproximacion.
n n! nne−n√
2πn n!/(nne−n√
2πn)
1 1 0,922 0,9222 2 1,919 0,9605 120 118,019 0,98310 3628800 3598695,619 0,992
2.4.3. Sobre la funcion Gamma
Con ya vimos, con la funcion Gamma es posible generalizar la idea del factorial cuando n es cualquiernumero real positivo. La funcion Gamma se define de la siguiente manera
Γ(k) =
∫ ∞0
xk−1e−xdx , k > 0 . (2.27)
95

Borra
dor Pre
limin
ar
2.4. SERIE DE TAYLOR
Por ejemplo, si k = 1, tenemos
Γ(1) =
∫ ∞0
x0e−xdx = lımb→∞
[−e−x
]b0
= 1 .
Podemos integrar (2.27) por partes:
Γ(k) = lımb→∞
[e−xxk
k
]b0
+1
k
∫ ∞0
xke−xdx , k > 0 , (2.28)
se puede demostrar que el primer termino de (2.28) se hace cero, por lo tanto:
Γ(k) =1
kΓ(k + 1) , k > 0 (2.29)
es decir:Γ(k + 1) = kΓ(k) , k > 0 . (2.30)
Veamos:
k = 1 → Γ(2) = 1Γ(1) = 1 = 1!k = 2 → Γ(3) = 2Γ(2) = 2 · 1 = 2!k = 3 → Γ(4) = 3Γ(3) = 3 · 2 · 1 = 3!k = 4 → Γ(5) = 4Γ(4) = 4 · 3 · 2 · 1 = 4!
entonces, si k = n es un entero positivo, se tiene que
Γ(n+ 1) = n! (2.31)
Ahora bien, podemos hacer lo siguiente. Partimos de (2.29):
Γ(k) =1
kΓ(k + 1) , k 6= 0 , (2.32)
reemplazamos k → k + 1 en (2.32) y obtenemos:
Γ(k + 1) =1
k + 1Γ(k + 2) , k 6= −1 , (2.33)
si sustituimos (2.33) en (2.32) resulta:
Γ(k) =Γ(k + 2)
k(k + 1), k 6= 0,−1 , (2.34)
si reemplazamos k → k + 1 en (2.33) obtenemos
Γ(k + 2) =Γ(k + 3)
(k + 2), k 6= −2 , (2.35)
al sustituir (2.35) en (2.34) resulta lo siguiente
Γ(k) =Γ(k + 3)
k(k + 1)(k + 2), k 6= 0,−1,−2 . (2.36)
96

Borra
dor Pre
limin
ar
2.4. SERIE DE TAYLOR
Estas operaciones se pueden repetir hasta n:
Γ(k) =Γ(k + n)
k(k + 1)(k + 2) · · · (k + n− 1), k 6= 0,−1,−2, . . . ,−(n− 1) . (2.37)
Todo esto sirve para lo siguiente. Si k = −1/2, entonces por (2.32)
Γ
(−1
2
)= −2Γ
(1
2
),
el valor de Γ(
12
)lo podemos buscar en alguna tabla matematica.
En este caso, lo que se obtiene es Γ(
12
)=√π. Esto significa que si conocemos Γ
(12
)se puede determinar
Γ(− 1
2
), por lo tanto
Γ
(−1
2
)= −2
√π .
Algunos ejemplos:
0! = Γ(0 + 1) = Γ(1) = 1(− 1
2
)! = Γ(− 1
2 + 1) = Γ(
12
)=√π(
− 32
)! = Γ(− 3
2 + 1) = Γ(− 1
2
)= −2
√π(
12
)! = Γ( 1
2 + 1) = Γ(
32
)= 1
2Γ(
12
)= 1
2
√π
2.4.4. Taylor en varias variables
Solo por razones de completitud, y para reforzar los conceptos de que es un desarrollo en series para unafuncion alrededor de un determinado punto, escribiremos el desarrollo en series de Taylor para una funcionde dos variables f = f(x, y). Esta es
f(x, y) = f(a, b) + (x− a) fx|ab + (y − b) fy|ab
+1
2!
[(x− a)2fxx
∣∣ab
+ 2(x− a)(y − a) fxy|ab + (y − a)2 fyy|ab]
+1
3!
[(x− a)3 fxxx|ab + 3(x− a)2(y − a) fxxy|ab + 3(x− a)(y − a)2 fxyy|ab + (y − a)3 fyyy|ab
]+ · · ·
De una manera mas compacta
f(xj + xj0
)=
∞∑n=0
1
n!
(xk∂k
)nf (xm)
∣∣∣xm=xm0
⇒ f (r + a) =
∞∑n=0
1
n!(r · ∇)
nf (xm)|r=a .
Donde hemos utilizado la siguiente convencion
fx =∂
∂x= ∂x; fy =
∂
∂y= ∂y; fxx =
∂2
∂x2= ∂xx; fxy =
∂2
∂x∂y= ∂xy; fyy =
∂2
∂y2= ∂yy; · · ·
97

Borra
dor Pre
limin
ar
2.4. SERIE DE TAYLOR
2.4.5. Ejemplos
2.4.6. Practicando con Maxima
La grafica mostrada en la Figura 1 pueden obtenerse de la siguiente manera:> restart:
> n := 5:
> f := exp(-t)*t∧n;
> Int(f,t=0..infinity)=int(f,t=0..infinity);
> GAMMA(5+1);
> plot(f,t=0..20);
> ‘f(5)‘=evalf(subs(t=5,f));
2.4.7. Ejercicios
1. Utilice la siguiente definicion
tan−1 x =
∫ x
0
1
1 + t2,
expanda el integrando y luego integre termino por termino para derivar la siguiente expansion conocidacomo expansion de Gregory
tan−1 x = x− x3
3+x5
5− · · · =
∞∑n=0
(−1)n
2n+ 1x2n+1 .
Evalue la serie para x = π4 .
2. Utilizando la definicion
sen−1x =
∫ x
0
1√1 + t2
,
derive las expresiones siguientes
sen−1x =
∞∑n=0
(2n)!
4n(n!)2
x2n+1
2n+ 1,
sen−1(1− x) =π
2−√
2x
(1 +
∞∑n=1
1.3.5. · · · .(2n− 1)
4n(2n+ 1)n!xn
).
3. Encuentre los primeros cinco terminos, diferentes de cero, de la serie de Taylor, de la funcion
f(x) =1 + x
x2
[2 + 2x
1 + 2x− ln(1 + 2x)
x
].
Puedes usar el programa Maxima.
98

Borra
dor Pre
limin
ar
2.5. SERIES DE FOURIER
2.5. Series de Fourier
Otro de los casos de expansion en una base completa de funciones lo constituyen la base de Fourier. Eneste caso la serie de Fourier la constituyen funciones continuas, reales de variable real y definidas en [0, 2π],C∞[0,2π], en termino de funciones trigonometricas.
Esto es el conjunto de funciones {|u1〉 , |u2〉 , |u3〉 , · · · , |un〉 · · · } representadas por
|u0〉 = 1, |u2n〉 = cos(nx) y |u2n−1〉 = sen(nx), con n = 1, 2, 3, · · ·
Es claro que {|u1〉 , |u2〉 , |u3〉 · · · , |un〉 , · · · } es un conjunto de funciones ortogonales por cuanto
〈un |um〉 = δnm| |un〉 |2 ⇒
0 si n 6= m
∫ 2π
0dx sen(nx) sen(mx) = 0∫ 2π
0dx cos(nx) sen(mx) = 0∫ 2π
0dx cos(nx) cos(mx) = 0
||un〉|2 si n = m
∫ 2π
0dx = 2π∫ 2π
0dx cos2(nx) = π∫ 2π
0dx sen2(nx) = π
Por lo tanto, podremos construir una base ortonormal de funciones{|e1〉 , |e2〉 , |e3〉 , · · · , |en〉 , · · · } de la forma
|e0〉 =1√2π, |e2n〉 =
1√π
cos(nx) y |e2n−1〉 =1√π
sen(nx)
Tal y como se muestra en la figura 2.7 distintas funciones pueden ser expandidas con sumas parciales deFourier. A diferencia de las series de potencias, que imponen que las funciones a ser expandidas deben sercontinuas y continuamente diferenciables en el intervalo, la series de Fourier pueden representar funcionescontinuas a trozos, siempre y cuando cumplan con algunas condiciones.
Por lo tanto cualquier funcion definida en el intervalo [0, 2π] puede expresarse en terminos de esta basecomo
|f〉 =
∞∑i=0
ci |ei〉 ⇒ ci = 〈ei |f〉 =
1√2π
∫ 2π
0dx f(x) = c0 ≡ a0 si i = 0
1√π
∫ 2π
0dx f(x) cos(nx) = c2n ≡ am si i = 2n
1√π
∫ 2π
0dx f(x) sen(nx) = c2n−1 ≡ bm si i = 2n− 1
donde los ci son los coeficientes de Fourier, con lo cual podemos escribir
F (x) =a0
2+
∞∑n=1
[an cos(nx) + bnsen(nx)] ,
el termino a0 es colocado fuera de la sumatoria, y multiplicado por 1/2, solo por conveniencia.
99

Borra
dor Pre
limin
ar
2.5. SERIES DE FOURIER
Figura 2.7: Expansiones de Varias funciones en sumas parciales de Series de Fourier. Tomado de Eric W.Weisstein. Fourier Series. http://mathworld.wolfram.com/FourierSeries.html
De manera equivalente, si el perıodo es T y para un t0 generico
F (t) =a0
2+
∞∑n=1
[an cos
(2πnt
T
)+ bnsen
(2πnt
T
)]con
a0 = 2T
∫ t0+T
t0dt f(t)
an = 2T
∫ t0+T
t0dx f(t) cos
(2πntT
)bn = 2
T
∫ t0+T
t0dt f(t) sen
(2πntT
)La figura 2.7 muestra la aproximacion de las distintas sumas parciales para distintas funciones, a medida
que aumentamos el numero de terminos la aproximacion mejora.Podemos expresar la expansion de una serie de Fourier de manera mas compacta, esta expresion se conoce
en algunos ambitos como la expresion integral para la series de Fourier
F (x) =1√2π
∫ 2π
0
dt f(t)
+
∞∑n=1
{[∫ 2π
0
dt f(t) cos(nt)
]cos(nx) +
[∫ 2π
0
dt f(t) sen(nt)
]sen(nx)
}
=1√2π
∫ 2π
0
dt f(t) +
∞∑n=1
∫ 2π
0
dt f(t) cos(n[t− x]) .
Tambien es muy comun expresar una serie de Fourier en termino de una base compleja. Vale decir
100

Borra
dor Pre
limin
ar
2.5. SERIES DE FOURIER
{· · · |φk〉 · · ·
}↔ {· · · e−ikx · · · } con k = 0,±1,±2, · · · . Con lo cual
|f〉 =
∞∑k=−∞
Ck|φk〉 ≡∞∑
k=−∞
Cke−ikx con Ck =
〈φk|f〉〈φk|φk〉
=1
2π
∫ π
−πdx e−ikxf(x) .
Podremos reescribir (una vez mas) la expresion de una suma parcial de la serie de Fourier, dado que
an cos(nx) + bn sen(nx) =1
π
∫ π
−πdt f(t) cos(n[t− x]) ,
tendremos que
Fn(x) =a0
2+
n∑k=1
[ak cos(kx) + bksen(kx)] =a0
2+
n∑k=1
[1
π
∫ π
−πdt f(t) cos(n(t− x))
]
= <
[∫ π
−πdt f(t)
{1
2+
n∑k=1
(e−i(t−x)k
)}].
y al sumar la progresion geometrica que representa una serie de exponenciales llegamos a
Fn(x) =1
2π
∫ π
−πdt f(t)
[sen((n+ 1
2
)(t− x)
)sen(
12 (t− x)
) ]≡ 1
2π
∫ π
−πdt f(t) K(x, n, t) ,
la cual siempre es convergente y el termino
K(x, n, t) =
[sen((n+ 1
2
)(t− x)
)sen(
12 (t− x)
) ],
se conoce como el nucleo de la transformacion de F , el Kernel de Dirichlet.La pregunta basica que sigue es, en todos estos casos: ¿como se relaciona la expansion de Fourier |f〉 ⇔
F (x) con la funcion f(t) que genera los coeficientes de la expansion? Notese que es una forma de mirar unarelacion entre F (x)↔ f(t). Pasamos de f(t) a F (x) mediante una “transformacion”
Fn(x) =1
2π
∫ π
−πdt f(t) K(x, n, t) .
Este tipo de relaciones se denomina transformacion integral y en particular esta es una de las expresionesde las llamadas Transformadas de Fourier.
2.5.1. Condiciones de Dirichlet
Las condiciones que una determinada funcion f(x) debe cumplir para poder ser representada como unaserie de Fourier, se conocen con el nombre de condiciones de Dirichlet9 las cuales pueden ser esquematizadasen los siguientes puntos:
la funcion f(x) debe ser periodica
9Johann Peter Gustav Lejeune Dirichlet 1805 - 1859. Matematico Aleman con importantes contribuciones en Teorıasde numeros Algebraica, Series y aproximaciones de funciones y ecuaciones diferenciales parciales.
101

Borra
dor Pre
limin
ar
2.5. SERIES DE FOURIER
la funcion f(x) debe se univaluada y continua a trozos (continua menos, en un numero finito de puntos)con un numero finito de maximos y mınimos
la integral∫ T/2−T/2 dx|f(x)| debe ser convergente. Donde [−T/2, T/2] quiere indicar el intervalo de defi-
nicion de una funcion con perıodo T .
Podemos formalizar un poco mas las condiciones de Dirichlet en el llamado teorema de Fourier.
Teorema de Fourier: Sea f(x) una funcion en el intervalo −π ≤ x ≤ π y definida para el resto de larecta real tal que cumpla con f(x + 2π) = f(x). Es decir f(x) es 2π−periodica. Supongamos ademasque existe la integral∫ π
−πdx f(x) , y que Ck =
1
2π
∫ π
−πdx e−ikxf(x) con k = 0,±1,±2, · · · .
y si |f(x)| esta acotada para un intervalo [a, b] con −π < a ≤ x ≤ b < π, entonces
F (x) =
∞∑k=−∞
Cke−ikx es convergente al valor F (x) =
1
2
(lımε→0+
f(x+ ε) + lımε→0−
f(x− ε))
y si f(x) es continua en x = x0 entonces F (x0)→ f(x0).
En este punto se pueden puntualizar varias cosas:
1. El valor F (x) = 12
(lımε→0+ f(x+ ε) + lımε→0+ f(x− ε)
)al cual converge la expansion de Fourier,
cobra particular importancia cuando el punto x = x0 es una discontinuidad. Tal y como veremos masadelante (seccion 2.5.3) y expresa este teorema, las series de Fourier son particularmente apropiadaspara expandir funciones discontinuas (en un numero finito de puntos en el intervalo), sin embargo,por ser una base de funciones continuas no puede reproducir la discontinuidad como tal. La expansionde Fourier alrededor de un punto de discontinuidad x → x±0 tendera al valor F (x) → F (x±0) ≡ Fmdonde Fm = F (x+0)+F (x−0)
2 . Es decir, tendera al valor medio de los valores de la discontinuidad por laizquierda F (x−0) y por la derecha F (x+0).
2. Si los coeficientes de Fourier tienen variaciones acotadas en el intervalo y |Ck| → 0 con k → ∞.Entonces
∞∑k=−∞
|Ck|2 =1
2π
∫ π
−πdx |f(x)|2 ⇔ 1
2a2
0 +
∞∑n=1
|a2n + b2n| =
1
π
∫ π
−πdx |f(x)|2 ,
que no es otra cosa que la expresion de la completitud de esta base de funciones.
Para ilustrar esta relacion entre la funcion f(x) y su expansion en serie de Fourier F (x) analicemos elsiguiente ejemplo
La siguiente funcion, muy conocida en el ambito de los circuitos electrico, se denomina la funcion ondacuadrada
f(t) =
−1 si − 12T ≤ t < 0
+1 si 0 ≤ t ≤ 12T ,
102

Borra
dor Pre
limin
ar
2.5. SERIES DE FOURIER
En este caso se puede integrar entre [0, T/2] y luego multiplicar todo por 2.
a0 =2
T
∫ T2
0
dt = 1 , an =2
T
∫ T2
0
cos
(2πnt
T
)dt =
sen (nπ)
nπ= 0 ,
bn =2
T
∫ T2
0
sen
(2πnt
T
)dt =
1− cos (nπ)
nπ=
1− (−1)n
nπ,
Entonces solo sobreviven los b2n+1 ya que coeficientes pares se anulan: b2n = 0.
f(t) = a0 + 2
∞∑n=1
bnsen
(2πnt
T
)= 1 +
4
π
(sen(ωt) +
sen(3ωt)
3+
sen(5ωt)
5+
sen(7ωt)
7+ · · ·
)donde hemos denotado ω = 2π/T .
Al definir la funcion ω podemos interpretar los coeficientes de Fourier an, bn como las contribuciones decada uno de los armonicos an, bn → ωn = 2nπ
T . A partir de estas contribuciones se construye el espectro depotencia, el cual esta relacionado con la energıa que aporta cada uno de estos armonicos. Por ello construimosun cantidad En =
√a2n + b2n y graficamos En vs n tal y como se puede comprobar en la figura 2.9, cuadrantes
IV y VII. Se encuentra que se puede asociar un espectro de potencia a cada senal y con lo cual realizar unaespecie de identificacion.
En este punto podemos hacernos algunas preguntas:
¿que hubiera pasado si en vez de considerar el intervalo(−T2 ,
T2
)hubieramos considerado (0, T )?
¿tendrıamos el mismo desarrollo en serie de Fourier?
¿el mismo espectro?
Justifique sus respuestas.
2.5.2. Consideraciones de simetrıa en series de Fourier
Es de hacer notar que estas propiedades de simetrıa respecto al perıodo de la funcion (f(x) = f(−x)simetrıa y f(x) = −f(−x) antisimetrıa) para un perıodo −T2 ≤ x ≤ T
2 pueden y deben ser explotadas parasimplificar los calculos. Esto se puede resumir en
f(x) = f(−x) ⇒{an 6= 0bn = 0
y alternativamente f(x) = −f(−x) ⇒{an = 0bn 6= 0
Pero mas interesante aun es cuando estas propiedades de simetrıa se presentan en un cuarto del perıodo.Vale decir, que f(x) sera par o impar respecto a T/4 i.e. f
(T4 + x
)= ±f
(T4 − x
)⇒ f(−s) = ±f(s) donde
s = T4 − x. Entonces
bn =2
T
∫ x0+T
x0
ds f(s) sen
(2πns
T+πn
2
).
Donde los lımites de integracion no se han visto alterados porque la funcion es periodica. Es inmediatocomprobar que
sen
(2πns
T+πn
2
)= sen
(2πns
T
)cos(πn
2
)+ cos
(2πns
T
)sen(πn
2
),
103

Borra
dor Pre
limin
ar
2.5. SERIES DE FOURIER
es decir
bn =2
T
[cos(πn
2
)∫ x0+T
x0
ds f(s)sen
(2πns
T
)+ sen
(πn2
)∫ x0+T
x0
ds f(s) cos
(2πns
T
)],
por lo que si n = 2k ⇒ sen(πn2
)= sen(πk) = 0 y si n = 2k − 1⇒ cos
(2k−1
2 π)
= 0.La misma consideracion se puede hacer para los coeficientes an (queda como ejercicio para el lector) y se
puede concluir que
Si f(x) par en T/4 entonces a2n−1 = b2n = 0.
Si f(x) impar en T/4 entonces a2n = b2n−1 = 0.
2.5.3. El Fenomeno de Gibbs
Tal y como hemos mencionado, a diferencia de las series de potencias, las series de Fourier manejan razo-nablemente bien las discontinuidades, pero por ser una base de funciones continuas, no puede reproducirlas.Tal y como comentamos en el Teorema de Fourier y muestra la figura 2.8 el valor de las sumas parciales deFourier en un punto de discontinuidad x = x±0 sera el promedio de los valores F (x−0) (por la izquierda)y F (x+0) (por la derecha) en la discontinuidad. Esto es la expansion de Fourier alrededor de un punto de
discontinuidad x→ x±0 tendera al valor F (x)→ F (x±0) ≡ Fm donde Fm = F (x+0)+F (x−0)2 .
Podemos ver en la figura 2.8 que, tanto por la izquierda como por la derecha de la discontinuidad de lafuncion escalon, las sumas parciales de Fourier oscilan y no convergen a los valores x±0. El comportamientooscilante de las sumas parciales de Fourier alrdedor de las discontinuidades, que no desaparecen ni en ellımite se denominan fenomeno de Gibbs en honor a su descubridor Josiah Willard Gibbs.10
Para entender que pasa en la discontinuidad consideremos una variacion de la onda cuadrada consideradaanteriormente (??). Entonces sus sumas parciales seran
f(t) =
1 si 0 ≤ t < π
0 si π ≤ t < 2π⇒ F c2n(x) =
1
2+
2
π
n∑k=1
1
2k − 1sen ((2k − 1)x) ,
porque los coeficientes pares (an) se anulan.Para estudiar el fenomeno de Gibbs reescribimos la suma parcial anterior de una manera ingeniosa
F c2n(t) =1
2+
2
π
n∑k=1
(∫ t
0
ds cos(2k − 1)s
)=
1
2+
2
π
∫ t
0
ds
(n∑k=1
cos(2k − 1)s
)=
1
2+
1
π
∫ t
0
ds
(sen(2ns)
sen(s)
)donde, utilizando la formula de Moivre y convirtiendo esa serie de cosenos en una de exponenciales la cual,a su vez es una progresion geometrica (y le queda la comprobacion al lector), hemos sustituido
n∑k=1
cos(2k − 1)s =sen(2ns)
sen(s).
Es inmediato convencerse que las sumas parciales F c2n(x) siempre tendran maximos y mınimos
dF c2n(x)
dx=
sen(2nx)
sen(x)= 0, ⇒ para x =
mπ
2ncon m = 1, 2, 3, · · ·
10Josiah Willard Gibbs 1839 - 1903. Algunos lo consideran el primer Fısico Norteamericano, de hecho fue el primero enrecibir un tıtulo de doctorado por una universidad norteamericana (Yale University). Hizo importantes aportes en electromagne-tismo y sobre todo en termodinamica y fısica estadıstica, sentando las bases matematicas para estas disciplinas. En matematicases conocido su estudio de las oscilaciones de las expansiones de las series de Fourier en los puntos de discontinuidad.
104

Borra
dor Pre
limin
ar
2.5. SERIES DE FOURIER
Las Series de Fourier tienden a sobre-estimar el valor de los puntos de discontinuidad en ±18 % esto esun valor de ≈ 1,1789797. La inclusion de mas terminos en las sumas parciales no mejoran la situacion. Elfenomeno de Gibbs no se restringe a Series de Fourier sino que tambien se presenta en las demas series defunciones (ver detalles en la referencia: Arfken-Weber-2000) .
El fenomeno de Gibbs fue observado ¡experimentalmente! por primera vez por Albert Michelson.11. Parafinales de 1800 Michelson habıa creado un dispositivo mecanico para medir las componentes de Fourier desenales electricas. Al incorporarle una onda cuadrada observo que una oscilacion inesperada en los puntosde discontinuidad. Creyo que esa oscilacion se debıa a defectos del dispositivo. Luego de probar multiplestipos de senales periodicas y observar un comportamiento similar, decidio comentarselo a su amigo WillardGibbs, de la Universidad Yale. Al poco tiempo Gibbs volvio con una explicacion que dejo intacta la fama deMichelson como instrumentista. El fenomeno es una consecuencia de la teorıa de series de Fourier y no delequipo disenado por Michelson12.
2.5.4. Correccion al fenomeno de Gibbs: Factor σ de Lanczos
Una de las estrategia para corregir las oscilaciones del fenomeno de Gibbs se le debe a Lanczos13. Con-siderando el mismo caso de la funcion onda cuadrada, se puede intentar sustituir la funcion oscilante F cn(x)por su promedio F cn(x) alrededor del punto x. Vale decir
F c2n(x)→ F c2n(x) =n
π
∫ x+ π2n
x− π2n
ds F c2n(s) =n
π
∫ x+ π2n
x− π2n
ds
[1
2+
2
π
n∑k=1
1
2k − 1sen((2k − 1)s)
],
desarmando tendremos que
F c2n(x) =n
π
∫ x+ π2n
x− π2n
ds
[1
2+
2
π
n∑k=1
1
2k − 1sen((2k − 1)s)
]
=n
π
[π
2n+
2
π
n∑k=1
1
(2k − 1)2cos((2k − 1)s)
∣∣∣∣x+ π2n
x− π2n
]
F c2n(x) =1
2+
2
π
n∑k=1
1
2k − 1
[sen(π2n (2k − 1)
)π2n (2k − 1)
]︸ ︷︷ ︸
σ
sen((2k − 1)x) .
Con lo cual hemos identificado el factor σ de Lanczos. Siguiendo este mismo proceso se puede generalizarpara cualquier funcion de tal modo que una serie de Fourier generica podra ser corregida con un factor σpara lograr
Fn(x) =a0
2+
n−1∑k=1
[sen(kπn
)(kπn
) ](ak cos(kx) + bksen(kx)) ≡ a0
2+
n−1∑k=1
σk (ak cos(kx) + bksen(kx)) .
11Albert Abraham Michelson Strelno, Prussia, 1852 - Pasadena EEUU. 1931. Premio Nobel en Fısica (1907) uno de losfısicos experimentales mas habilidosos de todos los tiempos. La precision y lo ingenioso de los instrumentos creados por el sonfamosos. Con importantes contribuciones en medidas de fenomenos en optica. Una de sus contribuciones mas conocidas sonlos experimentos para mostrar la inexistencia del Ether como medio de transmision para el fenomeno electromagnetico. Masdetalles http://nobelprize.org/physics/laureates/1907/michelson-bio.html
12Mas detalles http://en.wikipedia.org/wiki/Gibbs_phenomenon13Cornelius Lanczos 1893 - 1974 Hungrıa. Matematico hungaro con contribuciones importante en Relatividad y Fısica
Teorica. En matematicas es conocido inventar la transformada rapida de Fourier. Mas detalles en http://www-history.mcs.
st-and.ac.uk/Biographies/Lanczos.html
105

Borra
dor Pre
limin
ar
2.5. SERIES DE FOURIER
2.5.5. Ejemplos
1. Variedades de dientes de sierra
Otra funcion muy comun es la denominada dientes de sierra
f(t) = at si 0 ≤ t ≤ T , con a constante
los coeficientes son los siguientes:
a0 =2
T
∫ T
0
atdt = aT ,
an =2
T
∫ T
0
at cos
(2πnt
T
)dt =
a T
π2n2
[nπsen (2nπ)− sen2 (nπ)
]= 0 ,
bn =2
T
∫ T
0
at sen
(2πnt
T
)dt = − aT
nπ.
Tenemos entonces que
f(t) = at =a0
2+
∞∑n=1
bnsen
(2πnt
T
)=aT
2− aT
π
∞∑n=1
sen (ωnt)
n, para 0 ≤ t ≤ T .
En el caso particular de hacer a = 3 y T = 2→ ωn = nπ, entonces:
f(t) = 3t = 3− 6
π
∞∑n=1
sen (nπt)
n= 3−6sen (π t)
π−3sen (2π t)
π−2sen (3π t)
π−3sen (4π t)
2π−6sen (5π t)
5π+· · ·
La figura 2.9 (cuadrantes V y VI) muestra la construccion de esta funcion y su representacion en Seriesde Fourier.
A partir de esta funcion podemos hacer unas variaciones. Por ejemplo considerese la funcion
f(t) = at si−T2≤ t ≤ T
2, con a constante ⇒
a0 = 2T
∫ T/2−T/2 atdt = 0
an = 2T
∫ T/2−T/2 at cos
(2πntT
)dt = 0
bn = 2T
∫ T/2−T/2 at sen
(2πntT
)dt = −aT (−1)n
nπ .
Claramente es una funcion impar f(−x) = −f(x) y ası lo refleja su expansion en series de Fourier. Sihacemos a = 3 y T = 2→ ωn = nπ tendremos que la expresion para de la serie es
f(t) = 3t =6sen (π t)
π− 3sen (2π t)
π+
2sen (3π t)
π− 3sen (4π t)
2π+
6sen (5π t)
5π+ · · · con
−T2≤ t ≤ T
2,
la cual, si bien es parecida no es igual a la anterior, debido que estamos expandiendo otra funcion.
Otra variacion posible de la funcion “diente de sierra” puede ser la version completamente par del“diente”, f(−x) = f(x). Esta es
f(t) =
−at si −T2 ≤ t ≤ 0
at si 0 ≤ t ≤ T2
106

Borra
dor Pre
limin
ar
2.5. SERIES DE FOURIER
El calculo de los coeficientes resulta en:
a0 =2
T
∫ 0
−T/2(−at)dt+
2
T
∫ T/2
0
atdt =aT
2,
an =2
T
∫ 0
−T/2(−at) cos
(2πnt
T
)dt+
2
T
∫ T/2
0
at cos
(2πnt
T
)dt =
a T
π2n2[(−1)
n − 1] ,
bn =2
T
∫ 0
−T/2(−at) sen
(2πnt
T
)dt+
2
T
∫ T/2
0
at sen
(2πnt
T
)dt = 0 .
En este caso son los coeficiente bn los que se anulan.
Adicionalmente, notese que para n par, los coeficientes an tambien se anulan, Otra vez, si hacemosa = 3 y T = 2→ ωn = nπ tendremos la serie:
f(t) =3
2− 12 cos (π t)
π2− 4 cos (3π t)
3π2 − 12
25
cos (5π t)
π2+ · · · con
−T2≤ t ≤ T
2
2. Funcion cuadratica
Otro caso, complementario al anterior por sus propiedades de simetrıa, es la expansion en series deFourier de la funcion f(x) = x2 para −π < x < π. Entonces los coeficientes se la expansion seran
f(x) = x2 ⇒
a0 = 1
π
∫ π−π x2dx = 2π2
3
an = 2π
∫ π0x2 cos(nx)dx = 4(−1)n
n2
ya que los coeficientes correspondientes a los terminos impares bn se anulan. Con lo cual
x2 =π2
3+ 4
∞∑n=1
(−1)n cos(nx)
n2.
Notese que como un resultado particular, al evaluar en x = π, se tiene la funcion zeta de Riemann ζ(2)
π2 =π2
3+ 4
∞∑n=1
1
n2⇒ ζ(2) ≡
∞∑n=1
1
n2=π2
6.
Pero este caso se presta tambien para considerar funciones no periodicas. Supongamos que queremosdesarrollar la expansion de Fourier para f(t) = t2 pero en este caso con 0 < t < 2. Si este fuera el caso,empezamos por suponer que la funcion tienen un perıodo, digamos T = 4. Esto es −2 ≤ t ≤ 2. Con locual
a0 =2
4
∫ 2
−2
t2dt =4
4
∫ 2
0
t2dt =8
3
an =2
4
∫ 2
−2
t2 cos
(2πnt
4
)dt =
4
4
∫ 2
0
t2 cos
(πnt
2
)dt =
16
π2n2cos(nπ) =
16
π2n2(−1)n .
Con lo cual tendremos que
t2 =4
3+ 16
∞∑n=1
(−1)n
π2n2cos(πnx
2
)para 0 < t ≤ 2 .
107

Borra
dor Pre
limin
ar
2.5. SERIES DE FOURIER
2.5.6. Practicando con Maxima
2.5.7. Ejercicios
108

Borra
dor Pre
limin
ar
2.5. SERIES DE FOURIER
(7)(7)
(4)(4)
O O
(5)(5)
O O
(2)(2)
O O
(3)(3)
O O
(6)(6)
O O
O O
(1)(1)
O O
O O
O O
O O
O O
O O
O O O O
O O
O O
O O
Programa para generar cuadraturas de GaussK Legendre para n puntosrestart: Digits:=20:n := 3: L := LegendreP(n,z): p:=expand(%);
p :=52
z3 K32
z
Lar raíces de los polinomios de Legendre representan las abscisas del problemax := [fsolve(p)];
x := K0.77459666924148337704, 0., 0.77459666924148337704Se puede construir una procedimiento que tome como entrada una función f x y genere los valores aproximados
proced := f -> sum(c['i']*f(x['i']),'i'=1..n):Se calculan los pesos a partir de resolver el siguiente sistema lineal de ecuaciones:
ecs := []:for i from 1 to n do ecs := [op(ecs),proced(z->z^(i-1)) = int(z^(i-1),z=-1..1)]:end do:ecs;
c1 C c2 C c3 = 2, K0.77459666924148337704 c1 C 0.77459666924148337704 c3 = 0,
0.60000000000000000001 c1 C 0.60000000000000000001 c3 =23
sys := {op(ecs)}:var := {seq(c[k],k=1..n)}:pesos := solve(sys,var); assign(pesos):
pesos := c1 = 0.55555555555555555555, c2 = 0.88888888888888888891, c3= 0.55555555555555555555
Para probar el método, generemos aleatoriamente un polinomio de grado 2 nK 1q := randpoly(z,degree=2*n-1);
q := K56K 7 z5 C 22 z4 K 55 z3 K 94 z2 C 87 zcon el polinomio anterior construyamos una función g x
g := unapply(q,z);g := z/K56K 7 z5 C 22 z4 K 55 z3 K 94 z2 C 87 z
apliquemos la regla definida anteriormente calculado := proced(g);
calculado := K165.86666666666666667Calculemos el resultado exacto
exacto := int(q,z=-1..1);
exacto := K248815
Ahora podemos comparar el resultado exacto con el aproximadoevalf(exacto - calculado);
0.FIN
109

Borra
dor Pre
limin
ar
2.5. SERIES DE FOURIER
Figura 2.8: Aproximaciones por series de Fourier para la funcion escalon, linea roja. Las curvas correspondena sumas parciales de Fourier: F40(x), F100(x), F200(x),
Figura 2.9: Un par de funciones, definidas con un perıodo T , a ser expresadas en como expansiones en Seriesde Fourier. En los cuadrantes I y II, encontramos una onda cuadrada. La primera (cuadrante I) definida enun intervalo
(−T2 ,
T2
)y en el cuadrante II la misma funcion definida en un intervalo (0, T ). El cuadrante III
ilustra las aproximaciones de la serie de Fourier para n = 3, 7, 20, mientras que el espectro de potencia sepresenta en el cuadrante IV. La onda “diente de sierra”, definida en un intervalo (0, T ), se presenta en elcuadrante V. Sus aproximaciones en series de Fourier para n = 3, 7, 10 se pueden observar en el cuadranteVI, mientras que el espectro de potencia en el cuadrante VII.
110
Borra
dor Pre
limin
arCapıtulo 3Series II
111

Borra
dor Pre
limin
ar
3.1. SERIES Y ESPACIOS DE HILBERT
La ruta de este capıtulo
3.1. Series y espacios de Hilbert
Hemos dejado “sueltos” algunos conceptos para los espacios de Hilbert infito-dimensional. El primero deestos conceptos es que un vector |a〉 ∈ E∞ surge de la combinacion lineal de elementos de una base infinita{|ei〉}, (de una serie) que converge al vector |a〉 para un espacio donde tambien la norma del vector convergea un valor finito ‖a‖2 = 〈a |a〉.
El segundo concepto fue la posibilidad de expresar un determinado vector (una funcion) como combinacionlineal de una base (de dimension infinita) de un espacio vectorial E∞. Efectivamente, esa combinacion lineal(de dimension infinita) habra de converger a el valor de la funcion en ese punto. En su momento expresamosestos conceptos intuitivos y facilmente demostrables para En (un espacio vectorial Euclidiano de dimensionfinita, n−dimensional) y sin mayores justificaciones hicimos el “salto ” a E∞ (un espacio Euclidiano infinito-dimensional). Ahora, equipados con los conceptos de convergencia uniforme estamos en capacidad de exploraresas razones que antes eludimos.
Ambos conceptos tienen que ver con la palabra completitud, la cual, como veremos, no tiene el mismosignificado en cada una de las situaciones antes mencionadas, pero sera complementario. En el primer casola completitud de E∞ se logra al poder expresar un vector como una combinacion lineal de una base infinitaque converja al valor del vector. En el segundo caso diremos que la base {|ei〉} para E∞ sera completa siexpande la totalidad de los vectores de E∞.
3.1.1. Completitud de E∞
La primera idea de completitud de un Espacio de Hilbert E∞ tiene que ver con el hecho que, en eseespacio, donde la norma de un vector es finita ‖a‖2 = 〈a |a〉 <∞, la combinacion lineal de los elementos de
una base infinita, {|ei〉}, converja al vector |a〉. Esto es, ai |ei〉n→∞−→ |a〉.
Para el caso de En es inmediato que, dada una base (ortonormal, por ejemplo)
|a〉 = ai |ei〉 ⇒ ‖a‖2 = 〈a |a〉 = aiai <∞ , con i = 1, 2, 3, . . . n ,
la norma es finita, por cuanto es la suma de terminos finitos (las componentes del vector (a1, a2, a3, · · · an)).Sin embargo, para el caso de E∞ las componentes del vector sera funcion de las sumas parciales, esto eshasta donde desarrollemos la serie y debemos demostrar que si
|a〉n ⇔ (a1n, a
2n, a
3n, a
4n, · · · ann)
n→∞−→ |a∞〉 ⇔ (a1∞, a
2∞, a
3∞, · · · aj∞, · · · ) ⇒ ‖ |a∞〉 − |an〉 ‖ < ε .
Es decir que, efectivamente, componente a componente el vector |an〉 converja al vector |a〉.El criterio de convergencia de Cauchy en este caso significa que: dadas dos sumas parciales (desarrollos
parciales en una determinada base infinita {|ei〉}) |an〉 = ai |ei〉 con i = 1, 2, . . . n y |am〉 = aj |ej〉 conj = 1, 2, . . .m entonces:
‖ |am〉 − |an〉 ‖ = ‖ |am〉 − |a〉 − |an〉+ |a〉 ‖ ≤ ‖ |a〉 − |an〉 ‖+ ‖ |a〉 − |am〉 ‖ < ε′ + ε′′ ≡ ε ,
con lo cual las diferencias en las sumas parciales seran siempre menor que un 0 < ε < 1.Notese que hemos utilizado la desigualdad triangular ‖x + y‖ ≤ ‖x‖ + ‖y‖, y es esa misma desigualdad
triangular lo que nos garantiza que:
|ajn − ajm|2 ≤∞∑j=1
|ajn − ajm|2 ≡ ‖ |am〉 − |an〉 ‖2 < ε ,
112

Borra
dor Pre
limin
ar
3.1. SERIES Y ESPACIOS DE HILBERT
vale decir, hemos demostrado que el termino j−esimo (y con ello todas las componentes del vector) de una
suma parcial, converge al termino correspondiente de la serie lımite. Esto es, ajnn→∞−→ ajm
m→∞−→ aj por lotanto que la combinacion lineal converge al vector. Nos queda por demostrar si su norma es finita, o lo quees lo mismo, 〈a |a〉 = aiai <∞ con i = 1, 2, 3, · · ·∞.
Es claro que:M∑j=1
|ajn − ajm|2 ≤∞∑j=1
|ajn − ajm|2 ≡ ‖ |am〉 − |an〉 ‖2 < ε ,
con lo cual si m→∞ tendremos que∑Mj=1 |ajn − aj |2 < ε, y si ahora hacemos:
M →∞ ⇒∞∑j=1
|ajn − aj |2 < ε ⇒ 〈a |a〉 =
∞∑j=1
|aj |2 ≡∞∑j=1
|aj + ajn − ajn|2 .
Ahora bien, para α y β complejos, se cumple:
(|α| − |β|)2 ≡ |α|2+|β|2−2|α||β| ≥ 0 ⇒ 2|α||β| ≤ α|2+|β|2 ⇒ |α+β|2 ≤ ||α|+|β||2 = |α|2+|β|2+2|α||β| ,
para que resulte:(|α| − |β|)2 ≤ 2
(|α|2 + |β|2
).
Finalmente, podemos aplicarlo al caso que nos compete:
〈a |a〉 ≡∞∑j=1
|aj + ajn − ajn|2 ≤ 2
∞∑j=1
|aj − ajn|2 +
∞∑j=1
|ajn|2 <∞ .
3.1.2. Conjunto completo de funciones
El segundo sentido de completitud tiene que ver con que el conjunto (funciones) de vectores base expandanla totalidad del espacio vectorial (de funciones). Esto es, si {|ui〉} ⇔ {ui(x)} es una base ortonormal paraE∞ entonces:
|a〉 = ai |ui〉 ⇒ ‖ |a〉 ‖2 = 〈a |a〉 = aiai =
∞∑k=1
|ak|2 con i = 1, 2, 3, . . .∞ .
Otra vez es la misma afirmacion que consideramos en el caso de un espacio finito dimensional En, en el cualdemostramos que una base {|ui〉} con i = 1, 2, 3, · · · , n expandıa todo el espacio.
Si adicionalmente existe una funcion cuadrado integrable, L2[a,b] definidas en el intervalo [a, b], la cual
pueda ser aproximada por la base:
‖ |f〉 ‖2 ≡ 〈f |f〉 <∞ ⇒ |f〉 =
∞∑i=0
ci |ui〉 ∼N∑i=0
ci |ui〉 ⇔ ‖f(x)‖2 ≡∫ b
a
dx|f(x)|2 ⇒ f(x) ∼N∑j=0
cj uj(x) .
Notese que hemos supuesto la existencia de un producto interno y si las bases son ortonormales tendremosque:
〈g |f〉 ≡∫ b
a
dx g∗(x)f(x) ⇒⟨uk |ul〉 ≡
∫ b
a
dx u∗k(x)ul(x) = δkl ⇒ ‖f(x)‖2 ≡∫ b
a
dx|f(x)|2 =
∞∑j=0
|cj |2 .
113

Borra
dor Pre
limin
ar
3.1. SERIES Y ESPACIOS DE HILBERT
donde:
ck =
∫ b
a
dx u∗k(x)f(x) .
Para demostrar que E∞ es completo, comenzamos por demostrar la llamada desigualdad de Bessel.Esta es: dada una base ortonormal infinita, {|ui〉} ⇔ {ui(x)} para un espacio vectorial de Hilbert, E∞, de
funciones cuadrado integrable f(x) ∈ L2[a,b], con un producto interno definido por 〈g |f〉 ≡
∫ ba
dx g∗(x)f(x),entonces se cumple que:
‖f(x)‖2 ≥∞∑k=1
|ck|2 con ck =⟨uk |f〉 =
∫ b
a
dx u∗k(x)f(x) ∧ 〈g |f〉 ≡∫ b
a
dx g∗(x)f(x) .
Para demostrar la desigualdad de Bessel, partimos de una afirmacion obvia en espacios finito dimensio-nales:
0 ≤ ‖ |f〉 − ci |ui〉 ‖2 ≡[〈f | − c∗k
⟨uk∣∣] [|f〉 − ci |ui〉] = ‖ |f〉 ‖2 − c∗k
⟨uk |f〉︸ ︷︷ ︸ck
−ci 〈f |ui〉︸ ︷︷ ︸c∗i
+c∗kci⟨uk |ui〉︸ ︷︷ ︸δki
,
donde k, i = 1, 2, 3, . . . , n Entonces, queda demostrada la desigualdad de Bessel al tomar el lımite n→∞:
0 ≤ ‖ |f〉 ‖2 −n∑k=1
|ck|2n→∞=⇒ ‖ |f〉 ‖2 ≥
∞∑k=1
|ck|2 .
Si definimos el error, Mn, que se comete al aproximar una funcion con su expansion hasta un terminon−esimo como Mn(b− a) ≡ ‖ |f〉 − αi |ui〉 ‖2 demostraremos que Mn es mınima si αi = ci =
⟨ui |f〉.
Para ello procedemos como es costumbre, partiendo de la definicion que acabamos de hacer y nos con-centramos en el caso finito dimensional:
0 ≤Mn(b− a) ≡ ‖ |f〉 − αi |ui〉 ‖2 = ‖ |f〉 − (αi − ci) |ui〉 − ck |uk〉 ‖2 .
Desarrollando
Mn(b− a) =[〈f | − (α∗k − c∗k)
⟨uk∣∣ − c∗k ⟨uk] [|f〉 − (αi − ci) |ui〉 − ci |ui〉
]=‖ |f〉 ‖2 − c∗i (αi − ci)− 2c∗i c
i − (α∗k − c∗k)ck +
n∑j=1
‖αj − cj‖2 + (α∗k − c∗k)ck + c∗i (αi − ci) + c∗i c
i
=
[‖ |f〉 ‖2 −
n∑i=1
‖ci‖2]
+
n∑j=1
‖αj − cj‖2 .
Pero la desigualdad de Bessel garantiza que la cantidad entre corchetes es positiva, por lo tanto Mn esmınima (y la denotaremos Mn ) cuando seleccionamos αj = cj . Mas aun, Mn decrece cuando n → ∞, valedecir:
Mn(b− a) = ‖ |f〉 ‖2 −n∑i=1
‖ci‖2 n→∞=⇒ M∞(b− a) = ‖ |f〉 ‖2 −
∞∑i=1
‖ci‖2 ,
y si, adicionalmente tenemos que Mn → 0 cuando n→∞ entonces es claro que:
‖ |f〉 ‖2 =
∞∑i=1
‖ci‖2 ⇒ {|ui〉} ⇔ {ui(x)} es completa.
114

Borra
dor Pre
limin
ar
3.2. SERIES DE LAURENT
Esta nocion de convergencia se denomina convergencia al promedio.Si adicionalmente exigimos que la serie ci |ui〉 converja uniformemente para x ∈ [a, b] entonces es claro
que: ∫ b
a
dx ‖f(x)− ci |ui〉 ‖2 = 0 ⇒ |f〉 = ci |ui〉 (con i = 1, 2, 3 · · · ,∞) ⇔ f(x) =
∞∑i=1
ciui(x) .
Podemos enumerar las condiciones para la cual exigiremos que una funcion pueda ser expresada enterminos de una base completa de funciones.
Que f(x) sea cuadrado integrable f(x) ∈ L2[a,b].
Que la base sea completa, {|ui〉} ⇔ {ui(x)} i.e. ‖ |f〉 ‖2 =∑∞i=1 ‖ci‖2.
Que la serie ci |ui〉 ⇔∑∞i=1 c
iui(x) converja uniformemente, para x ∈ [a, b].
3.1.3. Ejemplos
3.1.4. Practicando con Maxima
3.1.5. Ejercicios
3.2. Series de Laurent
Anteriormente consideramos series complejas de potencias. En esta seccion revisaremos, desde la pers-pectiva de haber expresado la derivada n-esima de una funcion analıtica, el equivalente a las series de Taylorpara funciones complejas de variable complejas.
3.2.1. Series de Taylor para funciones analıticas
Si f(z) es analıtica en un cırculo de radio R, encerrado por un contorno C y centrado en un punto z = z0,entonces f(z) puede ser expandida en series de potencias (enteras positivas) para todo |z − z0| < R de laforma:
f(z) =
∞∑n=0
f (n)(z0)
n!(z − z0)n ≡ f(z0) + f ′(z0)(z − z0) +
f ′′(z0)
2(z − z0)2 + · · ·+ f (n)(z0)
n!(z − z0)n +Rn ,
con el resto Rn(z) definido como:
Rn(z) =(z − z0)n
2iπ
∮C
f(ζ) dζ
(ζ − z0)n(ζ − z).
Para probar esta afirmacion partimos de la formula integral de Cauchy escrita convenientemente:
f(z) =1
2iπ
∮C
f(ζ) dζ
ζ − z=
1
2iπ
∮C
dζf(ζ)
ζ − z0
1
1− z − z0
ζ − z0
, (3.1)
115

Borra
dor Pre
limin
ar
3.2. SERIES DE LAURENT
de donde:
f(z) =1
2iπ
∮C
f(ζ) dζ
ζ − z≡ 1
2iπ
∮C
dζf(ζ)
ζ − z0
1 +
(z − z0
ζ − z0
)+
(z − z0
ζ − z0
)2
+ · · ·+(z − z0
ζ − z0
)n+
(z − z0
ζ − z0
)n+1
(ζ − zζ − z0
) ,
este ultimo corchete proviene de una forma ingeniosa de utilizar una serie geometrica de razon r =z − z0
ζ − z0.
Para entenderlo, recordemos que para una serie geometrica, se cumple que:
1 + r + r2 + r3 + · · ·+ rn =1− rn+1
1− r=
1
1− r− rn+1
1− r⇒ 1
1− r= 1 + r + r2 + r3 + · · ·+ rn +
rn+1
1− r.
Entonces:
f(z) =1
2iπ
∮C
f(ζ) dζ
ζ − z≡ 1
2iπ
∮C
dζf(ζ)
ζ − z0
n∑j=0
(z − z0
ζ − z0
)j+
(z − z0
ζ − z0
)n+1
(ζ − zζ − z0
) ,
con lo cual:
f(z) =
n∑j=0
(z − z0)j(
1
2iπ
∮C
dζf(ζ)
(ζ − z0)j+1
)+Rn(z) =
n∑j=0
f (j)(z0)
j!(z − z0)j +Rn(z) , (3.2)
donde:
Rn(z) =(z − z0)n
2iπ
∮C
dζf(ζ)
(ζ − z0)n(ζ − z). (3.3)
Obvio que la serie (3.2) converge si Rn(z)→ 0 cuando n→∞ y de eso es facil convencerse al acotar laecuacion (3.3). Esto es, considerando ζ sobre el contorno C y z en el interior de R, entonces:
|Rn(z)| =∣∣∣∣ (z − z0)n
2iπ
∮C
dζf(ζ)
(ζ − z0)n(ζ − z)
∣∣∣∣ <|z − z0|n
2π
∮C
∣∣∣∣ f(ζ)
(ζ − z0)n(ζ − z)dζ
∣∣∣∣<|z − z0|n
2πM
1
Rn2πR ,
donde, una vez mas, hemos utilizado la forma polar ζ = ζ − z0 = Reiθ y hemos acotado
∣∣∣∣ f(ζ)
ζ − z
∣∣∣∣ < M , con
lo cual es inmediato constatar que lımn→∞
∣∣∣∣z − z0
R
∣∣∣∣n = 0 ⇒ Rn(z)→ 0, con lo cual la serie converge.
Veamos el siguiente ejemplo, vamos a expandir
f(z) =1
1− z,
alrededor de z = z0.Esto es:
f(z) =1
1− z0+
1
(1− z0)2(z−z0)+
1
(1− z0)3(z−z0)2+
1
(1− z0)4(z−z0)3+· · ·+ (z − z0)n
(1− z0)n+1+· · · =
∞∑n=0
(z − z0)n
(1− z0)n+1.
116
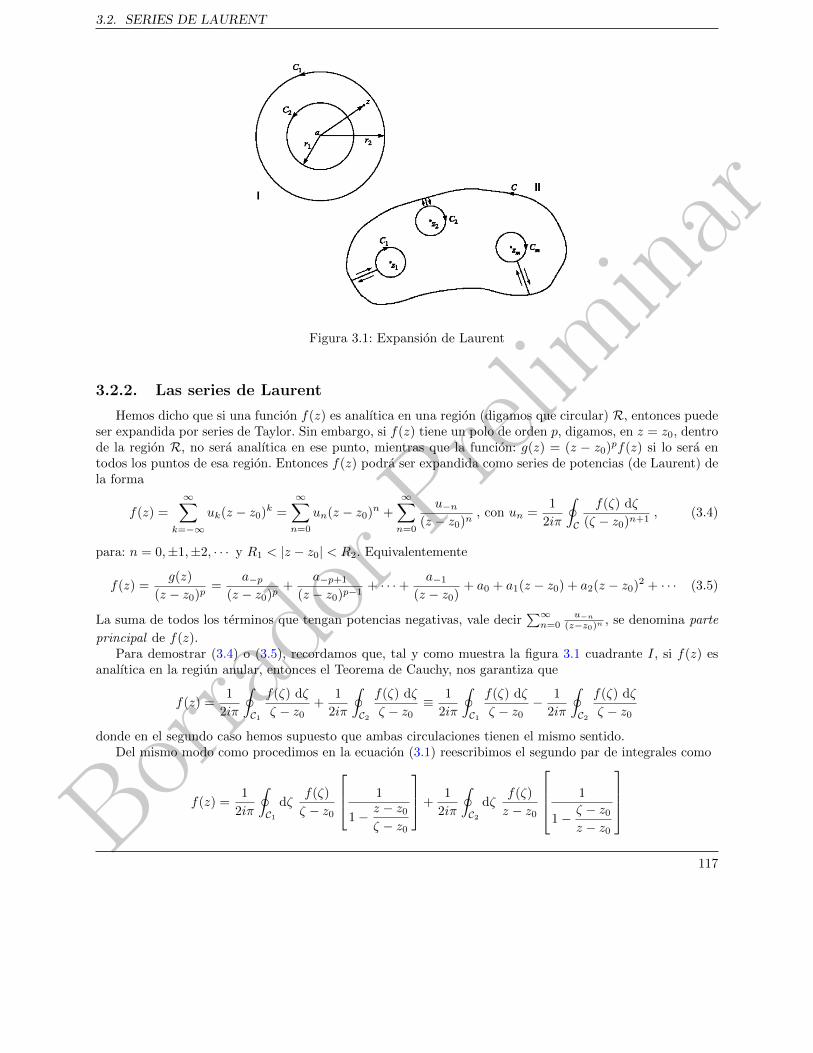
Borra
dor Pre
limin
ar
3.2. SERIES DE LAURENT
Figura 3.1: Expansion de Laurent
3.2.2. Las series de Laurent
Hemos dicho que si una funcion f(z) es analıtica en una region (digamos que circular) R, entonces puedeser expandida por series de Taylor. Sin embargo, si f(z) tiene un polo de orden p, digamos, en z = z0, dentrode la region R, no sera analıtica en ese punto, mientras que la funcion: g(z) = (z − z0)pf(z) si lo sera entodos los puntos de esa region. Entonces f(z) podra ser expandida como series de potencias (de Laurent) dela forma
f(z) =
∞∑k=−∞
uk(z − z0)k =
∞∑n=0
un(z − z0)n +
∞∑n=0
u−n(z − z0)n
, con un =1
2iπ
∮C
f(ζ) dζ
(ζ − z0)n+1, (3.4)
para: n = 0,±1,±2, · · · y R1 < |z − z0| < R2. Equivalentemente
f(z) =g(z)
(z − z0)p=
a−p(z − z0)p
+a−p+1
(z − z0)p−1+ · · ·+ a−1
(z − z0)+ a0 + a1(z − z0) + a2(z − z0)2 + · · · (3.5)
La suma de todos los terminos que tengan potencias negativas, vale decir∑∞n=0
u−n(z−z0)n , se denomina parte
principal de f(z).Para demostrar (3.4) o (3.5), recordamos que, tal y como muestra la figura 3.1 cuadrante I, si f(z) es
analıtica en la regiun anular, entonces el Teorema de Cauchy, nos garantiza que
f(z) =1
2iπ
∮C1
f(ζ) dζ
ζ − z0+
1
2iπ
∮C2
f(ζ) dζ
ζ − z0≡ 1
2iπ
∮C1
f(ζ) dζ
ζ − z0− 1
2iπ
∮C2
f(ζ) dζ
ζ − z0
donde en el segundo caso hemos supuesto que ambas circulaciones tienen el mismo sentido.Del mismo modo como procedimos en la ecuacion (3.1) reescribimos el segundo par de integrales como
f(z) =1
2iπ
∮C1
dζf(ζ)
ζ − z0
1
1− z − z0
ζ − z0
+1
2iπ
∮C2
dζf(ζ)
z − z0
1
1− ζ − z0
z − z0
117

Borra
dor Pre
limin
ar
3.2. SERIES DE LAURENT
y ahora invocando, una vez mas la progresion geometrica (??) podemos construir expresiones de integralesequivalentes a la ecuacion (??). Vale decir
f(z) =1
2iπ
∮C1
dζf(ζ)
ζ − z0
n−1∑j=0
(z − z0
ζ − z0
)j+
(z − z0
ζ − z0
)n(ζ − zζ − z0
)+
1
2iπ
∮C2
dζf(ζ)
z − z0
n−1∑j=0
(ζ − z0
z − z0
)j+
(ζ − z0
z − z0
)n(ζ − zz − z0
)
y equivalentemente
f(z) =1
2iπ
n−1∑j=0
(z − z0)j∮C1
dζf(ζ)
(ζ − z0)j+1︸ ︷︷ ︸uj
+Rn1(z) +1
2iπ
n−1∑j=0
1
(z − z0)j+1
∮C2
dζ f(ζ)(ζ − z0)j︸ ︷︷ ︸u−j
+Rn2(z)
(3.6)Con lo cual queda demostrado la forma funcional de los coeficientes de la expansion de Laurent. La demos-tracion de la convergencia, esto es n→∞⇒ Rn1(z)→ Rn2(z)→ 0 sigue el mismo esquema que utilizamospara demostrar la convergencia de la ecuacion (3.4) y se lo dejamos como ejercicio al lector.
Otra manera de representar las series de Laurent es por medio de las formulas:
f(z) =∞∑k=0
ak(z − z0)k +
∞∑k=1
bk(z − z0)k
, R1 < |z − z0| < R2 . (3.7)
donde:
ak =1
2πi
∫C
f(z)
(z − z0)k+1dz , k = 0, 1, 2, . . . , (3.8)
bk =1
2πi
∫C
f(z)
(z − z0)−k+1dz , k = 1, 2, . . . . (3.9)
En este caso, se supone que la funcion es analıtica en el dominio anular: R1 < |z − z0| < R2 y C es uncontorno cerrado simple en torno a z0 y contenido en la region anular.
En el caso de bk podemos ver que el integrando se puede escribir tambien como f(z)(z − z0)k−1. Si fes analıtica en |z − z0| < R2, entonces el integrando es una funcion analıtica en dicho disco y por lo tantobk = 0. Es decir, la serie (3.7) se reduce a una serie de Taylor donde los coeficientes son:
ak =1
2πi
∫C
f(z)
(z − z0)k+1dz =
f (k)(z0)
n!, k = 0, 1, 2, . . . .
En muchos casos las expansiones en series de Laurent no se generan a partir de las ecuaciones (3.4)o (3.7) sino a partir de manipulaciones algebraicas y expansiones en Taylor moduladas por otros factores.Analicemos el siguiente ejemplo.
El primero lo haremos directamente, vale decir, que como lo vamos a hacer no lo haremos otra vez.Queremos hacer una representacion en serie de Laurent de la funcion:
f(z) =1
z(z − 1).
Utilizando las formulas de (3.6), construimos la relacion
uj =1
2πi
∮C1
f(ζ)dζ
(ζ − z0)j+1=
1
2πi
∮C1
dζ
ζj+2(ζ − 1)= − 1
2πi
∮C1
dζ
ζj+2
∞∑n=0
ζn = − 1
2πi
∞∑n=0
∮C1
dζ
ζj+2−n
118

Borra
dor Pre
limin
ar
3.2. SERIES DE LAURENT
convirtiendo a la forma polar tendremos que
− 1
2πi
∞∑n=0
∮C1
riθeiθdθ
rj+2−nei(j+2−n)θ= −
∞∑n=0
δj+2−n,1 ⇒
un = −1 para n ≥ −1
un = 0 para n < −1
es decir
f(z) =1
z(z − 1)= −1
z− 1− z − z2 − z3 − · · ·
3.2.3. Integracion por el metodo de los residuos: los residuos de Laurent
Las expansiones de funciones en series de potencias dejan “residuos” al detener la expansion a para unadeterminada potencia. Esto se puede apreciar claramente en la expresion de Taylor para funciones analıticas.Ahora, las expansiones de Laurent nos muestran otro “residuo”. Explotaremos las series de Laurent parafunciones con polos y construiremos un metodo para evaluar integrales de funciones en esos puntos. Primeroestudiaremos los residuos en general y luego los utilizaremos para evaluar integrales.
Hemos dicho que si f(z) tiene un polo de orden p en z = z0 ∈ R, entonces∮C
dz f(z) 6= 0 ⇒ f(z) =
∞∑n=−∞
ak(z−z0)k =a−p
(z − z0)p+
a−p+1
(z − z0)p−1+· · ·+ a−1
(z − z0)+a0+a1(z−z0)+a2(z−z0)2+· · ·
mas aun, tendremos que los coeficientes de la expansion pueden ser calculados a partir de
an =1
2iπ
∮C
f(ζ) dζ
(ζ − z)n+1n = 0,±1,±2, · · · si n = −1, ⇒
∮Cf(ζ) dζ = 2iπa−1 ≡ 2iπRes f(z) (3.10)
Es decir, la integracion a lo largo de un contorno C que aisle al polo z = z0 es proporcional al residuocorrespondiente a la expansion de Laurent alrededor de ese polo. Nos queda entonces calcular el residuo paraası no calcular la integral.
Esta situacion se ilustra con el siguiente ejemplo. Supongamos
f(z) =sen z
z4=
1
z4
(z − z3
3!+z5
5!+ · · ·
)=
1
z3− 1
3!z+z
5!+ · · · ,
por lo tanto:
a−1 = − 1
3!⇒
∮Cf(ζ) dζ = 2iπa−1 = − iπ
3
En general, si f(z) tiene un polo de orden p en z = z0 ∈ R, entonces
(z−z0)pf(z) = a−p+a−p+1(z−z0)+· · ·+a0(z−z0)p+· · · ⇒ dp−1
dzp−1[(z−z0)pf(z)] = (p−1)!a−1+
∞∑n=1
bn(z−z0)n
con lo cual concluimos que
a−1 ≡ Res f(z) = lımz→z0
(1
(p− 1)!
dp−1
dzp−1[(z − z0)pf(z)]
)(3.11)
Si, por ejemplo consideramos
f(z) =eiz
(z2 + 1)2≡ eiz
(z + i)2(z − i)2⇒
z0 = i ⇒ d
dz[(z − i)2f(z)] =
d
dz
[eiz
(z + i)2
]
z0 = −i ⇒ d
dz[(z + i)2f(z)] =
d
dz
[eiz
(z − i)2
]
119

Borra
dor Pre
limin
ar
3.2. SERIES DE LAURENT
con lo cual
Reseiz
(z2 + 1)2
∣∣∣∣i
= lımz→i
1
1!
d
dz
[eiz
(z + i)2
]= lımz→i
(z + i)2ieiz − eiz2(z + i)
(z + i)2=−4ie−1 −−4ie−1
16= − i
2e
del mismo modo se procede para el caso z = −i
Un caso particular y muy util lo constituyen las funciones racionales del tipo f(z) =p(z)
q(z)y f(z) tiene
un polo simple en z = z0. Esto es q(z0) = 0 entonces
Res f(z)|z0 = lımz→z0
(z − z0)p(z)
q(z)= p(z0) lım
z→z0
(z − z0)
q(z)=
p(z0)
q′(z0)(3.12)
porque hemos utilizado el Teorema de L’Hopital. Este caso lo podemos ejemplificar si consideramos unafuncion
f(z) =4− 3z
z2 − z≡ 4− 3z
z(z − 1)con polos en
z = 0 ⇒ Res f(z)|z=0 =
4− 3z
2z − 1
∣∣∣∣z=0
= −4
z = 1 ⇒ Res f(z)|z=1 =4− 3z
2z − 1
∣∣∣∣z=1
= 1
(3.13)
3.2.4. Ejemplos
1. Expandirf(z) = ln(1 + z)
alrededor de z = 0 (Serie de Maclaurin)
f(z) = ln(1+z) = ln(1 + z)|z=0+
∞∑n=1
(−1)n+1n!
(1− z)n+1
∣∣∣∣z=0
zn ≡ f(0)+f ′(0)z+f ′′(0)
2z2+
f ′′′(0)
3!z3+· · · = z−z
2
2+z3
3+· · ·
2. Expandir
f(z) = ln
[1 + z
1− z
],
alrededor de z = 0 (Serie de Maclaurin)
ln
[1 + z
1− z
]≡ ln[1+z]−ln[1−z] =
[z − z2
2+z3
3· · ·]−[−z − z2
2− z3
3· · ·]
= 2
[z +
z3
3+z5
5· · ·]
=
∞∑n=0
2z2n+1
2n+ 1.
Consideremos los siguientes ejemplos de desarrollos en Series de Laurent
3. Dada la funcion:
f(z) =1
z(z − 2).
La funcion puede escribirse en la forma:
f(z) =1
z(z − 2)= −1
2
[1
z− 1
z − 2
], 0 < |z| < 2 .
120

Borra
dor Pre
limin
ar
3.2. SERIES DE LAURENT
Por otro lado, sabemos que:
− 1
z − 2=
1
2
1
1− z/2=
1
2
∞∑n=0
(z2
)n=
∞∑n=0
zn
2n+1, |z| < 2 ,
por lo tanto:
f(z) =1
z(z − 2)= −1
2
1
z− 1
2
∞∑n=0
zn
2n+1
= −1
2
1
z− 1
4− 1
8z − 1
16z2 − 1
32z3 − 1
64z4 − 1
128z5 − · · · , 0 < |z| < 2 .
4. Sea la funcion
f(z) =1
(z − 1)(z − 3).
Esta funcion tienes polos de orden 1 en z = 1 y z = 3. Ademas, expresando f(z) como una suma defracciones parciales, tendremos:
f(z) =1
(z − 1)(z − 3)= −1
2
[1
z − 1− 1
z − 3
], 1 < |z| < 3 ,
Para 1 < |z| < 3.Tenemos los siguientes desarrollos:
1
z − 1=
1
z
1
1− 1/z=
1
z
∞∑n=0
(1
z
)n=
∞∑n=0
1
zn+1, |z| > 1 ,
− 1
z − 3=
1
3
1
1− z/3=
1
3
∞∑n=0
(z3
)n=
∞∑n=0
zn
3n+1, |z| < 3 ,
La serie es:
f(z) =1
(z − 1)(z − 3)= −1
2
[ ∞∑n=0
zn
3n+1+
∞∑n=0
1
zn+1
]
= −1
6− 1
18z − 1
54z2 − 1
162z3 − 1
2z−1 − 1
2z−2 − 1
2z−3 − 1
2z−4 − · · · .
Para |z| > 3.En este caso no podemos utilizar el segundo desarrollo anterior, ya que este es valido solo para|z| < 3. Por lo tanto:
− 1
z − 3= −1
z
1
1− 3/z= −1
z
∞∑n=0
(3
z
)n= −
∞∑n=0
3n
zn+1, |z| > 3 ,
podemos entonces escribir
f(z) =1
(z − 1)(z − 3)= −1
2
[ ∞∑n=0
1
zn+1−∞∑n=0
3n
zn+1
]= −1
2
∞∑n=0
1− 3n
zn+1
= z−2 + 4 z−3 + 13 z−4 + 40 z−5 + · · · .
121

Borra
dor Pre
limin
ar
3.2. SERIES DE LAURENT
para |z| < 1.Escribimos
f(z) =1
(z − 1)(z − 3)= −1
2
[1
z − 1− 1
z − 3
]=
1
2
1
1− z− 1
6
1
1− z/3,
como |z| < 1 y |z/3| < 1 en este dominio, entonces:
f(z) =1
2
∞∑n=0
zn − 1
6
∞∑n=0
zn
3n=
1
2
∞∑n=0
zn[1− 1
3n+1
]=
1
3+
4
9z +
13
27z2 +
40
81z3 +
121
243z4 + · · · .
5. Dada la siguiente funcion
f(z) =e2z
(z − 1)3.
Sabemos que:
ez =
∞∑n=0
zn
n!, |z| <∞ ,
por lo tanto:
f(z) =e2z
(z − 1)3=
e2e2(z−1)
(z − 1)3= e2
∞∑n=0
2n(z − 1)n
n!(z − 1)3= e2
∞∑n=0
2n
n!(z − 1)n−3
= e2
[2
3+ (z − 1)
−3+ 2 (z − 1)
−2+ 2 (z − 1)
−1+
2
3z +
4
15(z − 1)
2+ · · ·
],
la cual es valida para: 0 < |z − 1| <∞.
6. Consideremos la funcion
f(z) =z − sen z
z3.
Esta funcion se puede escribir como:
f(z) =1
z2− sen z
z3.
Sabemos que:
sen z =
∞∑n=0
(−1)nz2n+1
(2n+ 1)!, |z| <∞ ,
entonces
f(z) =1
z2− sen z
z3=
1
z2−∞∑n=0
(−1)nz2n+1
z3(2n+ 1)!=
1
z2−∞∑n=0
(−1)nz2(n−1)
(2n+ 1)!
=1
z2− 1
z2−∞∑n=1
(−1)nz2(n−1)
(2n+ 1)!= −
∞∑n=1
(−1)nz2(n−1)
(2n+ 1)!
=1
6− 1
120z2 +
1
5040z4 − 1
362880z6 +
1
39916800z8 − · · · ,
valida para: 0 < |z| <∞.
122

Borra
dor Pre
limin
ar
3.3. TEOREMA DEL RESIDUO
3.2.5. Practicando con Maxima
3.2.6. Ejercicios
3.3. Teorema del Residuo
3.3.1. Integrales impropias
Hemos visto como calcular las integrales de funciones, en regiones multiplemente conexas, con polossimples a partir de residuos. Ahora generalizaremos ese esquema para una region, tambien multiplementeconexa, pero con un numero finito de polos. Tal y como se muestra en la figura 3.1 en el cuadrante II,realizamos una circulacion ingeniosa, de tal modo que aislamos los distintos polos. Ahora bien, como lafuncion es analıtica en la region bordeada por todos esos contornos, entonces∮
Cdz f(z) +
∮C1
dz f(z) +
∮C2
dz f(z) + · · ·∮Cm
dz f(z) = 0 ,
y al cambiar el sentido de circulacion comprobamos lo que ya sabıamos∮C
dz f(z) =
∮C1
dz f(z) +
∮C2
dz f(z) + · · ·∮Cm
dz f(z) ⇔∮C
dz f(z) = 2iπ
m∑j=1
Res f(z)z=z0j
donde hemos utilizado lo que hicimos para la ecuacion (3.10)Con ello podemos enunciar el Teorema del Residuo que ya hemos demostradoSi f(z) es analıtica en una region R excepto en un numero, m, finito de polos z01
, z02, z03
, · · · z0m entonces∮C
dz f(z) = 2iπ
m∑j=1
Res f(z)z=z0j
Una vez mas ejemplificamos. Sea la funcion
f(z) =4− 3z
z2 − z,
una funcion con polos simples en z = 0 y z = 1 correspondientes a residuos 4 y 1, respectivamente, tal ycomo se vio en la seccion (3.2.3). Entonces, utilizamos los resultado expuestos en el ejemplo (3.13)∮
C
dz4− 3z
z2 − z= 2πi(−4 + 1) = −6πi ,
siempre y cuando el circuito C encierre los dos polos, z = 0 y z = 1, para los cuales hemos calculado losresiduos.
3.3.2. Evaluacion de integrale reales e impropias
El teorema del residuo (3.3) es una herramienta poderosa para evaluar algunos tipos de integrales definidasen variable real. La intencion es “extender” el dominio de las funciones de la recta real al plano complejo.Una de las restricciones es que los contornos deben ser cerrados antes de que sean evaluados los residuos. Elpunto es que muchas integrales reales tienen contornos abiertos y la posibilidad de evaluar estas integralesa traves del Teorema del Residuo descansa en la forma como se cierran los contornos. En estos casos sedebe estimar las contribuciones de esos contornos adicionales que permiten cerrar los contornos abiertos. Acontinuacion expondremos algunas tecnicas para cerrar algunos tipos de contornos abiertos.
123

Borra
dor Pre
limin
ar
3.3. TEOREMA DEL RESIDUO
Figura 3.2: Circuitos y evaluacion de integrales reales, impropias
3.3.3. Integrales impropias del tipo∫∞−∞ dx f(x)
Este tipo de integrales implica, si ambos lımites existen∫ ∞−∞
dx f(x) = lımr→−∞
∫ 0
r
dx f(x) + lımr→∞
∫ r
0
dx f(x)↔ lımr→∞
∫ r
−rdx f(x)
Necesitaremos que el integrando sea una funcion racional f(x) = p(x)/q(x), donde q(x) 6= 0 ∀ x. Adicional-mente requeriremos que cuando menos q(x) ∼ x2p(x). Supuesto todo esto, convertimos nuestra funcion ra-cional en una funcion de variable compleja f(x)→ f(z) y consideramos la integral de circulacion,
∮C
dz f(z),sobre un contorno C descrito por el eje real y una semicircunsfrencia Γ en el plano complejo con y ≥ 0, tal ycomo se muestra en el cuadrante I la figura 3.3. La intencion es hacer r →∞ y con ello evaluar la integral∫∞
0dx f(x). Es facil convencerse que∮
C
dz f(z) =
∫Γ
dz f(z) +
∫ r
−rdx f(x) = 2iπ
m∑j=1
Res f(z)z=z0j
es decir, ∫ r
−rdx f(x) = 2iπ
m∑j=1
Res f(z)z=z0j −∫
Γ
dz f(z)
Esta estrategia es valida porque hemos supuesto que f(x) es racional y que q(x) 6= 0 ∀ x, entonces siexisten polos para f(z) estaran en el plano complejo (no sobre el eje real). Todos esos polos seran encenradospor el contorno C que hemos seleccionado. Mas aun, comprobaremos que
∫Γ
dz f(z) → 0 cuandoz → ∞.Esto es sencillo si notamos que
q(x) ∼ x2p(x) ⇒ |f(z)| < k
|z|2⇒∣∣∣∣∫
Γ
dz f(z)
∣∣∣∣ < k
r2πr =
kπ
rpara |z| = r ≥ 0
124

Borra
dor Pre
limin
ar
3.3. TEOREMA DEL RESIDUO
con lo cual llegamos a que para este tipo de integrales∫ ∞−∞
dx f(x) = 2iπ
m∑j=1
Res f(z)z=z0j para f(x) =p(x)
q(x), con q(x) 6= 0 ∀ x ∧ p(x) ∼ x2q(x) . (3.14)
Como un ejemplo consideremos evaluar la siguiente integral∫ ∞−∞
dx
x4 + 14⇒
∫ ∞−∞
dx
x4 + 14= 2iπ
m∑j=1
Res f(z)z=z0j
donde hemos utilizado la expresion (3.14). La extension analıtica
f(x)→ f(z) =1
z4 + 1tendro cuatro polos simples: z = e±
iπ4 ; z = e±
3iπ4 ;
correspondientes a las cuatro raıces de z4 = −1. Acto seguido calculamos los residuos invocando la relacion(3.12) que hemos construido para funciones racionales. Esto es
Resp(z)
q(z)
∣∣∣∣z=z0
=p(z0)
q′(z0)⇒
z = e
iπ4 ⇒ Res f(z)|
z=eiπ4
=1
4z3
∣∣∣∣z=e
iπ4
=e−3iπ
4
4=eiπ4
4
z = e3iπ4 ⇒ Res f(z)|
z=e3iπ4
=1
4z3
∣∣∣∣z=e
3iπ4
=e−9iπ
4
4=e−iπ
4
4
Hemos considerado unicamente los polos para el semiplano complejo y > 0 ya que seguimos considerandoel circuito descrito en el cuadrante I de la figura 3.3. Quedan dos polos ubicados en el semiplano complejoy < 0, tal y como se muestra en el cuadrante II de la misma figura 3.3.
Consecuentemente, tendremos que∫ ∞−∞
dx
x4 + 1=
2πi
4
(eiπ4 + e
−iπ4
)= πsen
(π4
)=
√2
2π ⇒
∫ ∞0
dx
x4 + 14=
1
2
∫ ∞−∞
dx
x4 + 14=
√2
4π .
3.3.4. Integrales de funciones racionales de cos θ y sen θ
Ahora mostraremos la estrategia para integrales de funciones racionales de funciones trigonometricas,G(cos(θ), sen(θ)). La idea es transformar estas integrales en otras de funciones de variable compleja a travesde los cambios de variables que conectan las funciones trigonometricas y los numeros complejos. Esto estransformar integrales de la forma∫ 2π
0
dθ G(cos θ, sen θ) →∮C
dz
zif(z) ,
mediante cambios de variables estandares
z = reiθ ⇒ dθ =dz
zi; cos θ =
1
2
(z +
1
z
); y sen θ =
1
2i
(z − 1
z
)(3.15)
Por ejemplo, en las tablas de integrales encontrabamos1 que∫ 2π
0
dθ
a+ bsen θ=
2π√a2 − b2
con |a| > |b| ,
1Encontrabamos porque hoy en dıa estas integrales las calculamos con manipuladores simbolicos del tipo Maple, Reduce,Matemathica o Mupad
125

Borra
dor Pre
limin
ar
3.3. TEOREMA DEL RESIDUO
veamos como se llega a ese resultado.Haciendo z = reiθ y asumiendo las consecuencias, tal y como se presenta en (3.15) arriba, tendremos que∫ 2π
0
dθ
a+ bsen θ=
∮C
dzzi
a+ b2i
(z − 1
z
) =
∮C
2dz
bz2 + 2aiz − bcon C una circunferencia |z| = 1
los polos de
f(z) =2
bz2 + 2aiz − b⇒ z±0 =
−a±√a2 − b2b
i ,
son los valores de z que anulan el denominador de f(z). Seguidamente verificamos la ubicacion de los polossimples y comprobamos que como |a| > |b| entonces
|z+0| =
∣∣∣∣∣−a+√a2 − b2b
i
∣∣∣∣∣ < 1 y |z−0| =
∣∣∣∣∣−a−√a2 − b2b
i
∣∣∣∣∣ > 1 ,
y por lo tanto, solo el primero de los polos esta encerrado por el circuito C con |z| = 1 tal y como muestraen el cuadrante III de la figura 3.3.
Una vez mas calculamos el residuo para z+0 a partir de (3.11). Entonces tendremos que
Res f(z)|z=z+0= lımz→z+0
(z − z+0)2
bz2 + 2aiz − b= lımz→z+0
2
2bz + 2ai=
1
bz+0 + ai≡ −i√
a2 + b2
finalmente ∫ 2π
0
dθ
a+ bsen θ=
∮C
2dz
bz2 + 2aiz − b= 2iπRes f(z)z=z+0 =
2π√a2 − b2
.
3.3.5. Integrales de Fourier
Otro grupo de integrales que pueden ser evaluadas mediante el teorema de Residuos son las integralesde Fourier. Integrales que involucran funciones racionales, f(x), que satisfacen las condiciones expuestasanteriormente y funciones senos y cosenos. Integrales del tipo∫ ∞
−∞dx f(x)
{cosmxsen mx
}↔∫ ∞−∞
dx f(x)eimx →∮C
dz f(z)eimz = 2iπ
m∑j=1
Res∣∣f(z)eimz
∣∣z=z0j
(3.16)
Con m > 0 y los polos correspondientes a los residuos que se muestran en el lado derecho, estan ubicadosen el semiplano complejo con y > 0. Es claro que el circuito seleccionado es Γ que muestra el cuadrante IIde la figura 3.3.
Equivalentemente, igualando partes reales e imaginarias∫ ∞−∞
dx f(x) cosmx = −2π
m∑j=1
Im Res∣∣f(z)eimz
∣∣z=z0j∫ ∞
−∞dx f(x)sen mx = 2π
m∑j=1
Re Res∣∣f(z)eimz
∣∣z=z0j
.
Otra vez, el circuito C se separa en una semicircunferencia Γ y el eje real.
126

Borra
dor Pre
limin
ar
3.3. TEOREMA DEL RESIDUO
Figura 3.3: Circuitos y evaluacion de integrales reales, impropias
Para demostrar que para evaluar las integrales de Fourier (3.16) se requiere la suma de los residuos nosconvencemos que la integral a lo largo de la semicircunferencia se anula. Esto es facil si comprobamos quey > 0 y m > 0, entonces si z = x+ iy tendremos que
|eimz| = |eimx||e−my| = e−my < 1 ⇒ |f(z)eimz| = |f(z)| ≤ |f(z)| |eimz|
con lo cual redujimos al de una funcion racional.Por ejemplo, comprobemos que∫ ∞
−∞
dx cosmx
x2 + k2=π
ke−km y
∫ ∞−∞
dx sen mx
x2 + k2= 0
es facil ver que el polo simple de la continuacion analıtica de f(x) es z0 = ik y su residuo sera
f(z) =eimz
z2 + k2⇒ z0 = ik ⇒ Res
eimz
z2 + k2
∣∣∣∣z=ik
=eimz
2z
∣∣∣∣z=ik
=e−mk
2ik
y por lo tanto ∫ ∞−∞
dxeimx
x2 + k2= 2iπ
e−mk
2ik=π
ke−mk
3.3.6. Otras integrales impropias
Existen integrales definidas para las cuales el integrando se hace infinito para un determinado punto enel rango de integracion. Esto es, en general
lımx→x0
|f(x)| → ∞ ⇒∫ b
a
dx f(x) = lımζ→0
∫ x0−ζ
a
dx f(x) + lımξ→0
∫ b
x0+ξ
dx f(x)
127

Borra
dor Pre
limin
ar
3.3. TEOREMA DEL RESIDUO
donde ζ y ξ tienden a cero de forma independiente, es decir, ambos lımites se efectuan independientemente.Ahora bien, puede darse el caso que uno o ambos lımites no existan pero si existe
lımε→0
(∫ x0−ε
a
dx f(x) + lımξ→0
∫ b
x0+ε
dx f(x)
)⇔ V.P.
∫ b
a
dx f(x)
Diremos entonces que existe el Valor Principal de Cauchy para esa integral. La estrategia en estos casos seradisenar un circuito tal que evite los polos de la extension analıtica de la funcion. Normalmente se estableceeste recorrido rodeando los polos con arcos de circunferencia cuyos radios luego tenderan a cero. Veamos conun ejemplo esta estrategia de circunnavegacion.
Por ejemplo, consideremos que queremos evaluar la siguiente integral∫ ∞0
dxsen x
x↔ lım
x→−0
sen x
x= 1 .
Si bien el lımite esta definido, cuando hacemos la extension analıtica2 f(x) = sen x/x→ f(z) = eiz/z lafuncion compleja presenta un polo simple en z = 0, con lo cual la integral compleja presenta un polo en laregion de integracion. Esto es∫ ∞
0
dxsen x
x→∮C
dzeiz
z=
∫ −ε−R
dxeix
x+
∫C2
dzeiz
z+
∫ R
ε
dxeix
x+
∫C1
dzeiz
z= 0 ,
donde hemos construido un circuito que rodea el polo z = 0 (cuadrante IV de la figura 3.3). Es claro que∮C
dz eiz
z = 0 porque la region no contiene ningun polo.
Ahora mostraremos que∫C1
dz eiz
z → 0, cuando R→∞.Para ello, convertimos
z = Reiθ ⇒ dz
z= idθ ,
entonces∣∣∣∣∫C1
dzeiz
z
∣∣∣∣ =
∣∣∣∣∫ π
0
dθ ieiz∣∣∣∣ ≤ ∫ π
0
dθ |eiz| =∫ π
0
dθ |eiR cos(θ)|︸ ︷︷ ︸1
|e−Rsen(θ)| =∫ π
0
dθ e−Rsen(θ) ,
con lo cual
I1 =
∫ π
0
dθ |eiz| =∫ π
0
dθ e−Rsen(θ) = 2
∫ π/2
0
dθ e−Rsen(θ) = 2
∫ ζ
0
dθ e−Rsen(θ)︸ ︷︷ ︸I1
+
∫ π/2
ζ
dθ e−Rsen(θ)︸ ︷︷ ︸I2
,para 0 ≤ ζ ≤ π/2.
Es claro que e−Rsen(θ) es una funcion decreciente en θ y como estamos tratando de demostrar que laintegral a lo largo del circuito se anula I1 → 0, podremos considerar los maximos valores para I1 y I2 en elentorno de integracion y fijarlos como constantes, al hacer esto tendremos lo maximos valores que podrantomar las integrales respectivas. Los maximos valores para I1 y I2, son, 1 y e−Rζ .
Entonces,
I1 =
∫ π
0
dθ |eiz| ≤ 2
[∫ ζ
0
dθ + e−Rsen(ζ)
∫ π/2
ζ
dθ
]= 2
[ζ + e−Rsen(ζ)
(π2− ζ)]
< 2ζ + πe−Rsen(ζ) .
2Notese que la extension analıtica ha sido f(x) = sen x/x→ f(z) = eiz/z y no f(x) = sen x/x→ f(z) = sen z/z La razonde esta seleccion se fundamenta en el comportamiento patologico (oscilante) de la funcion seno en infinito.
128
Borra
dor Pre
limin
ar
3.3. TEOREMA DEL RESIDUO
Al considerar que ζ → 0 y R→∞ comprobamos que I1 → 0.
Seguidamente nos toca demostrar que I2 =∫C2
dz eiz
z → 0 cuando ε→ 0. Para este caso z = εeiθ y como
siempre, dz/z = idθ, entonces la integral
I2 =
∫C2
dzeiz
z=
∫ π
0
dθ ieiε exp(iθ) ⇒ lımε→0I2 = lım
ε→0
∫ π
0
dθ ieiε exp(iθ) = iπ .
Esto implica que∮C
dzeiz
z=
∫ −ε−R
dxeix
x+ iπ +
∫ R
ε
dxeix
x= 0 ⇒︸︷︷︸
x→−x
∫ R
ε
dxeix − e−ix
x+ iπ = 0 ,
con lo cual es claro que∫ R
ε
dxeix − e−ix
x= −iπ ⇒ 2i
∫ R
ε
dxsen x
x= −iπ ⇒
∫ ∞0
dxsen x
x=π
2,
donde hemos hecho los lımites R→∞ y ε→ 0.
3.3.7. Ejemplos
1. Para evaluar la siguiente integral∫ ∞−∞
x2dx
(x2 + 1)2(x2 + 2x+ 2)⇒ f(z) =
z2
(z2 + 1)2(z2 + 2z + 2)
donde hemos realizado la extension analıtica f(x)→ f(z) y ubicado sus polos de z = i y z = i− 1 enel semiplano complejo y > 0 y los encerrados por el circuito descrito en el cuadrante I de la figura 3.3.El primero de estos polos es de segundo orden, mientras que el segundo corresponde a un polo simple.Consecuentemente, los residuos se calculan invocando la relacion general (3.11) arriba expuesta. Conlo cual para
z = i ⇒ lımz→i
(d
dz
[(z − i)2 z2
(z − i)2(z + i)2(z2 + 2z + 2)
])=−12 + 9i
100
y para
z = i− 1 ⇒ lımz→i−1
(z − i+ 1)z2
(z2 + 1)2(z − i− 1)(z + i− 1)=
3− 4i
25
Finalmente, podemos evaluar la integral∫ ∞−∞
x2dx
(x2 + 1)2(x2 + 2x+ 2)= 2iπ
2∑j=1
Res f(z)z=z0j = 2πi
(−12 + 9i
100+
3− 4i
25
)=
7π
50
2. Evaluemos ∫ ∞−∞
dxxsen πx
x2 + 2x+ 5
Partimos de la continuacion analıtica de
f(x)→ f(z) =zeizπ
z2 + 2z + 5⇒ z±0 = −1± 2i ⇒
∮C
dzzeizπ
z2 + 2z + 5= Res
zeizπ
z2 + 2z + 5
∣∣∣∣z=−1+2i
129

Borra
dor Pre
limin
ar
3.3. TEOREMA DEL RESIDUO
ya que ese es el unico polo encerrado por la circulacion Γ. Calculando el residuo tendremos
Reszeizπ
z2 + 2z + 5
∣∣∣∣z=−1+2i
= lımz→−1+2i
((z + 1− 2i)
zeizπ
z2 + 2z + 5
)= (−1 + 2i)
e−π(2+i)
4i
con lo cual∮C
dzzeizπ
z2 + 2z + 5=
∫ ∞−∞
dxx cos πx
x2 + 2x+ 5+i
∫ ∞−∞
dxxsen πx
x2 + 2x+ 5= 2iπ(−1+2i)
e−π(2+i)
4i=π
2(1−2i)e−2π
igualando parte real e imaginaria tendremos que∫ ∞−∞
dxx cos πx
x2 + 2x+ 5=π
2e−2π y
∫ ∞−∞
dxxsen πx
x2 + 2x+ 5= −πe−2π
3.3.8. Practicando con Maxima
3.3.9. Ejercicios
1. Determinar los polos y los residuos correspondientes para cada una de las funciones propuestas
f(z) =2z + 1
z2 − z − 2; f(z) =
(z + 1
z − 1
)2
; f(z) =sen z
z2; f(z) = cot z
2. Evaluar
a) ∮C
dz ez
cosh za lo largo de una circunsferencia |z| = 5
b) ∮C
(2z2 + 5)dz
(z + 2)3(z2 + 4)z2a lo largo de una circunsferencia |z − 2i| = 6 y
un cuadrado de vertices z = 1 + i; z = 2 + i; z = 2 + 2i y z = 1 + 2i.
3. Evaluar las siguientes integrales∫ ∞0
dx
(x2 + 1)(x2 + 4)2;
∫ ∞0
dx
x4 + x2 + 1;
∫ ∞−∞
dx
(x2 + 4x+ 5)2
4. Compruebe las siguientes evaluaciones∫ 2π
0
dθ
a+ b cos θ + csen θ=
2π√a2 − b2 − c2
con a2 > b2 + c2;
∫ 2π
0
cos2 3θ dθ
5− 4 cos 2θ=
3π
8.
5. Compruebe que
Para m > 0
∫ ∞0
dxcosmx
(x2 + 1)2=πe−m(1 +m)
4y
∫ ∞0
dxcos 2πx
x4 + x2 + 1=
π
2√
3e−π/
√3
6. Comprobar las evaluaciones para las siguientes integrales
130

Borra
dor Pre
limin
ar
3.4. TRANFORMADAS DE FOURIER
a) ∫ ∞0
dx sen x2 =
∫ ∞0
dx cos x2 =
√2π
4
b) ∫ ∞0
dxlnx
x4 + 1= −π
2√
2
16;
∫ ∞0
dx(lnx)2
x4 + 1=
3π3√
2
16
c) ∫ ∞0
dxx−p
x2 + 2x cosα+ 1=
(π
sen pπ
)( sen pα
sen α
)
3.4. Tranformadas de Fourier
La transformada de Fourier representa (como combinacion lineal de funciones sinusoidales) a funcionesdefinidas en toda la recta real y/o sin una periodicidad definida. Puede ser considerada como la generalizacionde la representacion en serie de Fourier, y es mayormente utilizada para expresar funciones que varıan en eltiempo con el unico requisito que tengan norma acotada, i.e.
∫∞−∞ dt |f(t)| finita.
Anteriormente hemos visto, que podemos expresar una funcion en termino de series de Fourier complejas
f(t) =
∞∑n=−∞
Cnei 2nπT t =
∞∑n=−∞
Cneiωnt ,
donde hemos definido ωn = 2nπT .
Ahora bien, podemos hacer T →∞ con lo cual [−T/2, T/2]→ [−∞,∞] pero tambien se tiene:
T →∞ ⇒ 2π
T=ω
n= ∆ω → dω y ademas
∫ T/2−T/2 dt f(t)
T→ 0 ya que
∫ ∞−∞
dt f(t) , existe y es acotada.
Si recordamos la expresion que toman los coeficientes de la expansion
Cn =1
T
∫ T/2
−T/2dx e
−i2nπxT f(x) ⇒ f(t) =
∞∑n=−∞
(∆ω
2π
∫ T/2
−T/2dx e−inxf(x)
)eiωnt ,
con lo cual hacer T →∞f(t) =
1
2π
∫ ∞−∞
dω eiωt∫ ∞−∞
dx e−iωxf(x)︸ ︷︷ ︸F (ω)
.
De este modo, la transformada de Fourier de una funcion y su inversa, pueden escribirse como
F (ω) ≡ F [f(t)] =1√2π
∫ ∞−∞
dt e−iωtf(t) ⇔ f(t) ≡ F−1[F (ω)] =1√2π
∫ ∞−∞
dω eiωtF (ω) .
3.4.1. Propiedades
Las transformada de Fourier cumplen con las siguiente propiedades, las cuales de derivan de la definicionarriba expuesta
131

Borra
dor Pre
limin
ar
3.4. TRANFORMADAS DE FOURIER
1. Las transformada de la derivada F [f ′(t)] = iωF (ω) y en general F [fn(t)] = inωnF (ω). Esta propiedades mas o menos inmediata a partir de la definicion integrando por partes
F [f ′(t)] =1√2π
∫ ∞−∞
dt eiωtf ′(t) =1√2π
eiωtf(t)∣∣∞−∞ +
iω√2π
∫ ∞−∞
dt eiωtf ′(t)iωF (ω)
2. La transformada de la integral
F[∫ t
ds f(s)
]=
1
iωF (ω) + 2πcδ(ω)
donde la funcion (distribucion) δ(ω) se denomina delta de Dirac y el termino 2πcδ(ω) representa latransformada de la constante de integracion
3. Escalamiento F [f(at)] = 1aF (ωa )
4. Traslacion F [f(t+ a)] = eiaωF (ω)
5. Multiplicacion por un exponencial F [eαtf(t)] = f(ω + iα)
3.4.2. Funciones pares e impares
Al igual que en las expansiones de Fourier, la paridad de las funcion f(t) es importante. Esto se notarapidamente a partir de la definicion. Supongamos f(t) = −f(−t), entonces
F (ω) =1√2π
∫ ∞−∞
dt e−iωtf(t) =1√2π
∫ ∞−∞
dt (cos(ωt)− isen(ωt)) f(t) =−2i√
2π
∫ ∞0
dt sen(ωt) f(t) ,
con lo cual podremos definir las transformadas de Fourier seno y coseno para funciones impares y paresrespectivamente. Esto es para funciones impares f(t) = −f(−t)
F (ω) =
√2
π
∫ ∞0
dt cos(ωt) f(t) ⇔ f(t) =
√2
π
∫ ∞0
dω cos(ωt) F (ω) ,
y para funciones pares f(t) = f(−t)
F (ω) =
√2
π
∫ ∞0
dt sen(ωt) f(t) ⇔ f(t) =
√2
π
∫ ∞0
dω sen(ωt) F (ω) .
3.4.3. Bases discreta y contınuas: la base de ondas planas
Haremos una digresion para fijar conceptos y extender algunos de los razonamientos que hemos desa-rrollado hasta aquı. Tal y como hemos visto repetidas veces, la representacion de un vector |F 〉 en unespacio vectorial abstracto V puede darse en termino de una base ortonormal de vectores (discreta y finitaBDF = {|u1〉 , |u2〉 , |u3〉 , · · · |un〉} o discreta e infinita BDI = {|v1〉 , |v2〉 , |v3〉 · · · |vn〉 · · · }) de la forma:
|F 〉 =
∑ni=0 ci |ui〉 =
∑ni=0 〈ui| F 〉 |ui〉 ⇐ BDF = {|u1〉 , |u2〉 , |u3〉 · · · |un〉}∑∞
i=0 ci |vi〉 =∑∞i=0 〈vi| F 〉 |vi〉 ⇐ BDI = {|v1〉 , |v2〉 , |v3〉 · · · |vn〉 · · · }
donde en ambos casos:
ci = 〈ui| F 〉 =
∞∑j=0
cj 〈ui |uj〉 =
∞∑j=0
cj δij ,
132

Borra
dor Pre
limin
ar
3.4. TRANFORMADAS DE FOURIER
la intencion ahora sera utilizar la transformada de Fourier para construir la generalizacion de bases discretasa continua |wα〉 de tal forma que transformamos el ındice de la sumatoria en la variable de una integral
|Ψ〉 =
∫dα c (α) |wα〉 ,
donde
c (β) = 〈wβ |Ψ〉 =
∫dα c (α) 〈wβ |wα〉 =
∫dα c (α) δ (α− β) ,
con en la cual δ (α− β) es una Delta de Dirac.Ası, los dos conceptos expresados hasta ahora tienen una expresion:
Propiedad \ Base Discreta ContinuaOrtogonalidad 〈vi |vj〉 = δij 〈wβ |wα〉 = δ (α− β)
Cierre 1 =∑∞j=0 |vj〉 〈vj | 1 =
∫dα |wα〉 〈wα|
Expansion |F 〉 =∑∞i=0 ci |ui〉 |Ψ〉 =
∫dα c (α) |wα〉
Componentes ci = 〈ui| F 〉 c (β) = 〈wβ |Ψ〉Producto Interno 〈G| F 〉 =
∑∞i=0 g∗i fi 〈G| F 〉 =
∫dα g∗ (α) f (α)
Norma 〈F | F 〉 =∑∞i=0 |fi|
2 〈F | F 〉 =∫
dα |f (α)|2
Ilustraremos esta generalizacion con la construccion de la base de ondas planas. Hemos visto que latransformada compleja de Fourier compleja para una funcion, se puede escribir como
F (s) =
∫ ∞−∞
dt eist f(t) � f(t) =
∫ ∞−∞
ds e−ist F (s) ,
las cuales reescribiremos en terminos mas familiares a la comunidad de fısicos como
ψ (x) =1√2π~
∫ ∞−∞
dp eipx/~ ψ (p) � ψ (p) =1√2π~
∫ ∞−∞
dx e−ipx/~ ψ (x)
Hemos tenido cuidado de incluir los factores de normalizacion adecuados para el caso de las descripcionesen mecanica cuantica. Estas formulas pueden ser reinterpretadas en funcion de los conceptos anteriormenteexpuestos y podemos definir una base continua de la forma
ψ (x) =1√2π~
∫ ∞−∞
dp
(1√2π~
ei px/~)
︸ ︷︷ ︸vp(x)
ψ (p) � ψ (p) =1√2π~
∫ ∞−∞
dx
(1√2π~
e−i px/~)
︸ ︷︷ ︸vxp (x)
ψ (x) ,
por lo cual
ψ (x) =
∫ ∞−∞
dp vp (x) ψ (p) � ψ (p) =
∫ ∞−∞
dx v∗p (x) ψ (x) .
Diremos que la funcion ψ (x) esta expresada en la base de ondas planas vp (x) = 1√2π~e
i px/~
Notese
El ındice p de vp (x) varıa de forma continua entre −∞ e ∞.
Que vp (x) = 1√2π~e
i px/~ /∈ L2 es decir no pertenece al espacio vectorial de funciones de cuadrado
integrable ya que su norma diverge
〈vp| vp〉 =
∫ ∞−∞
dx |vp (x)|2 =
∫ ∞−∞
dx1
2π~→∞
133

Borra
dor Pre
limin
ar
3.4. TRANFORMADAS DE FOURIER
Que las proyecciones de ψ (x) sobre la base de ondas planas es ψ (p) = 〈vp| ψ〉
La relacion de cierre para esta base se expresa como
1 =
∫dα |vα〉 〈vα| �
∫ ∞−∞
dp v∗p (x′) vp (x) =
∫ ∞−∞
dp1
2π~ei p(x
′−x)/~ = δ (x′ − x)
mientras que de la definicion de producto interno, uno obtiene
〈vp′ | vp〉 =
∫ ∞−∞
dx v∗p′ (x) vp (x) =
∫ ∞−∞
dp1
2π~ei x(p
′−p)/~ = δ (p′ − p)
Un ejemplo inmediato lo tenemos al considerar la funcion
f(t) =
{1 si |t| < 10 el resto
⇒ F (ω) =1√2π
∫ 1
−1
dt 1 e−iωt =1√2π
e−iω − eiω
−iω
∣∣∣∣1−1
=2sen ω√
2πω
Otro lo podremos construir a si consideramos la ecuacion diferencial inhomogenea y buscamos su solucion
dφ(x)
dx2−K2φ(x) = f(x) ⇒ 1√
2π
∫ 1
−1
dt
[dφ(x)
dx2−K2φ(x)
]e−iωt = F (ω) ,
donde F (ω) es la transformada de Fourier de la funcion f(x).Utilizando las propiedades de la transformada de Fourier obtenemos que
1√2π
∫ 1
−1
dt
[dφ(x)
dx2
]e−iωt −K2φ(ω) = F (ω) ⇒ −k2φ(ω)−K2φ(ω) = F (ω) ⇒ φ(ω) = − F (ω)
k2 +K2,
donde hemos representado φ(ω) como la transformada de Fourier de la solucion φ(x). Con lo cual
φ(x) =1√2π
∫ 1
−1
dt φ(ω) e−iωt = − 1√2π
∫ 1
−1
dtF (ω)
k2 +K2e−iωt .
Como solucion formal de la ecuacion diferencial resulta sencilla y el metodo tambien es inmediato. Elpunto crucial es la solucion del la integral que resulta de la transformacion inversa. Normalmente este tipode integrales no son tratables de manera analıtica. Pero siempre queda el recurso numerico.
3.4.4. Tranformadas discretas de Fourier
Aquı haremos algo mas contemporaneo que sera estudiar la version discreta de esta transformacion. Engeneral las integrales, en su mayorıa, no se pueden resolver analıticamente por lo que tenemos que procedera resolverlas de forma numerica. La mayor parte de los metodos numericos involucra convertir integrales ensumatorias. Es decir en series de funciones.
Hemos visto como las funciones trigonometricas (y las exponenciales de argumento imaginario) son or-togonales bajo integrales evaluadas en un determinado intervalo. En otras palabras con la definicion deproducto interno en un espacio de funciones. Ahora bien, esas mismas funciones (Fourier Generalidades,cosenos y funciones exponenciales de argumento imaginario) seran tambien ortogonales al ser evaluadas enpuntos muy particulares.
134

Borra
dor Pre
limin
ar
3.4. TRANFORMADAS DE FOURIER
Consideremos los siguientes 2N puntos tk = kT2N y probaremos que las funciones e2πiptk/T y e2πiqtk/T
seran ortogonales ∝ δqp en un conjunto esos puntos tk. Esto es
2N−1∑k=0
[e
2πiptkT
]∗e
2πiqtkT =
2N−1∑k=0
e2πistkT =
2N−1∑k=0
e2πisk
2N =
1− r2N
1− r= 0 r 6= 1
2N r = 1
donde hemos sustituido s = q − p, y evaluado en los puntos tk =kT
2Ncon k = 1, 2, 3, · · · , 2N − 1. Notese
que la ultima de las series es una serie finita y geometrica con razon r = e(πis)/N , que comienza con 1 y porlo tanto suma (dependiendo del valor de r) lo que aparece en la llave. Es inmediato convencerse que, paratodo N se cumple que r2N = e2πis = 1 (con s entero) con lo cual se cumple la relacion de ortogonalidad quebuscamos
2N−1∑k=0
[e
2πiptkT
]?e
2πiqtkT = 2Nδqp con k = 1, 2, 3, · · · , 2N − 1 (3.17)
Si hacemos un ligero cambio de notacion y llamamos ωm =2πm
Ttendremos algunos cambios, en apariencia,
cosmeticos
e±2πimtk
T → e±ωm tk ⇒ F (ωm) =1
2N
2N−1∑k=0
f(tk)e±ωm tk ⇔ f(tk) =1
2N
2N−1∑m=0
F (ωm)e±ωm tk (3.18)
La funcion F (ωm) representa la transformada discreta de Fourier de la f(tk). Para despejar la funcion f(tk)hemos utilizado la relacion de ortogonalidad 3.17.
Consideremos el siguiente f(tk) = cos(tk) evaluado en un perıodo T = 2π y dividido, digamos en N = 2intervalos. Los puntos en los cuales evaluaremos nuestra serie seran 2N = 4, vale decir
tk =kT
2N≡ kπ
2con k = 0, 1, 2, 3 ⇔ ωm =
2πm
T≡ m ⇒ eiωmtk
2N≡ eimkπ/2
2N
notese que la funcion f(tk) puede ser escrita como un vector f(tk) = (1, 0,−1, 0), con lo cual para encontrarla expresion de su transformada discreta de Fourier, F (ωm), podemos expresar la suma como una matriz detransformacion con ındices m, k. Esto es
eimkπ/2
2N⇔ 1
4
1 1 1 11 i −1 −i1 −1 1 −11 −i −1 0
con lo cual
F (ωm) =1
2N
2N−1∑k=0
f(tk)e±ωm tk ⇒
F (ω0)F (ω1)F (ω2)F (ω3)
=1
4
1 1 1 11 i −1 −i1 −1 1 −11 −i −1 0
10−1
0
=1
2
0101
Respecto a la ecuacion 3.18 se deben puntualizar varios elementos
la frecuencia angular ωm =2πm
Tcorresponde a lo que en Fısica se denomina el espacio recıproco (al
temporal), espacio de frecuencias u ω-espacio. Por ello la funcion F (ωm) esta expresada en este espaciode frecuencias, mientras que la funcion f(tk) en el de tiempos.
135

Borra
dor Pre
limin
ar
3.4. TRANFORMADAS DE FOURIER
La eleccion de uno de los signos + y − en la expresion e±ωm tk es arbitraria.
Con lo cual si “reconstruimos” la funcion original a partir de la transformada discreta nos sorprende elresultado, por cuanto no coincide
f(tk) =1
2e−itk +
1
2e−3itk ⇒ < [f(tk)] =
1
2cos(tk) +
1
2cos(3tk)
Ahora bien, para los puntos tk = 0, π2 , π, y π2 si se cumple que los valores cos(tk) = 1
2 cos(tk) + 12 cos(3tk).
En los pocos puntos seleccionados cos(tk) y cos(3tk) se asemejan. En la medida que seleccionemos mas puntosen esa medida se dejan de parecer y la reconstruccion de la funcion sera mas fidedigna.
3.4.5. Ejemplos
3.4.6. Practicando con Maxima
3.4.7. Ejercicios
136

Borra
dor Pre
limin
arCapıtulo 4PolinomiosOrtogonales
137

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
La ruta de este capıtulo
4.1. Series de Polinomios Ortogonales
Enunciaremos un teorema debido a Weierstrass el cual garantiza que una funcion continua en un intervalo[a, b] puede ser aproximada uniformemente por una serie de polinomios. Por lo tanto, cualquier funcioncontinua podra ser aproximada por combinaciones lineales de potencias.
El Teorema de aproximacion polinomica de Weiernstrass queda enunciado como sigue. Cualquier funcioncontinua f(x) en un intervalo cerrado x ∈ [a, b] podra ser aproximada uniformemente por polinomios en esemismo intervalo si, para un n suficientemente grande y un ε suficientemente pequeno siempre se tiene que
|Pn(x)− f(x)| < ε ∀ x ∈ [a, b]
Aceptaremos este teorema sin demostracion1, sin embargo este teorema nos permitira desarrollar las seccionessiguientes.
4.1.1. Polinomios de Legendre
El primero de los ejemplos de una base ortonormal de polinomios en la cual podremos expresar cualquierfuncion continua en el intervalo cerrado x ∈ [−1, 1] seran los Polinomios de Legendre. Estos vienen construidosa partir de la Formula de Rodrıgues
Pn(x) =1
n!2ndn
dxn(x2 − 1)n, n = 0, 1, 2, .....
con P0(x) = 1.Es decir
P0(x) = 1 P1(x) = x
P2(x) =1
2(3x2 − 1) P3(x) =
1
2(5x3 − 3x)
P4(x) =1
8(35x4 − 30x2 + 3) P5(x) =
1
8(63x5 − 70x3 + 15x)
......
4.1.2. Generalidades de los Polinomios de Legendre
Es facil comprobar que los polinomios de Legendre son mutuamente ortogonales para un producto internodefinido de la siguiente manera ∫ 1
−1
Pn(x)Pm(x)dx =2
2n+ 1δnm .
Donde la funcion delta de Kronecker es δαβ = 0 si α 6= β; y δββ = 1. La norma es definida por∫ 1
−1
P 2n(x)dx =
2
2n+ 1
notese que los polinomios de Legendre, calculados a partir de la Formula de Rodrigues no estan normalizados.
1Consultar: Byron, F.W. y Fuller W.F. (1970) Mathematics of Classical and Quantum Physics y Cushing, J. (1975)Applied Analytical Mathematics for Physical Sciences.
138

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
Ejemplos:
1. ∫ 1
−1
P1(x)P2(x) dx =
∫ 1
−1
[x]
[1
2
(3x2 − 1
)]dx =
∫ 1
−1
(3
2x3 − 1
2x
)dx = 0 .
2. ∫ 1
−1
P2(x)P2(x) dx =
∫ 1
−1
[1
2
(3x2 − 1
)] [1
2
(3x2 − 1
)]dx =
∫ 1
−1
(9
4x4 − 3
2x2 +
1
4
)dx =
2
5.
Al ser los Polinomios de Legendre un conjunto completo de funciones, ellos expanden el espacio defunciones continuas en el intervalo cerrado x ∈ [−1, 1]. Por ello cualquier funcion en el intervalo [−1, 1] puedeser expresada en esa base.
f(x) =
∞∑k=0
2k + 1
2
[∫ 1
−1
f(t)Pk(t) dt
]︸ ︷︷ ︸
ak
Pk(x) ,
los primeros terminos son:
f(x) =1
2
∫ 1
−1
f(t)dt+3
2
[∫ 1
−1
tf(t)dt
]P1(x) +
5
4
[∫ 1
−1
(3t2 − 1)f(t)dt
]P2(x)
+7
4
[∫ 1
−1
(5t3 − 3t)f(t)dt
]P3(x) +
9
16
[∫ 1
−1
(35t4 − 30t2 + 3)f(t)dt
]P4(x) + · · ·
Ejemplos
1. Si f(x) es un polinomio
f(x) =
m∑n=0
bnxn =
∞∑n=0
anPn(x) ,
entonces, no se requiere hacer ninguna integral por cuanto los coeficientes an se determinan a travesde un sistema de ecuaciones algebraicas. Para el caso de f(x) = x2 tendremos
f(x) = x2 = a0P0(x) + a1P1(x) + a2P2(x)
= a0 + a1x+1
2a2(3x2 − 1)
=
(a0 −
1
2a2
)+ a1x+
3
2a2x
2 ⇒ a0 =1
3, a1 = 0 , a2 =
2
3
=1
3P0(x) +
2
3P2(x) .
2. En el caso de una funcion mas complicada
f(x) =
√1− x
2,
por un lado ∫ 1
−1
f(x)Pk(x)dx =
∫ 1
−1
√1− x
2Pk(x)dx
139

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
la expansion en series de Legendre quedarıa como√1− x
2=
1
2
∫ 1
−1
√1− t
2dt+
3
2
[∫ 1
−1
t
√1− t
2dt
]P1(x) +
5
4
[∫ 1
−1
(3t2 − 1)
√1− t
2dt
]P2(x)
+7
4
[∫ 1
−1
(5t3 − 3t)
√1− t
2dt
]P3(x) +
9
16
[∫ 1
−1
(35t4 − 30t2 + 3)
√1− t
2dt
]P4(x) + · · ·
=2
3P0(x)− 2
5P1(x)− 2
21P2(x)− 2
45P3(x)− 2
77P4(x)− 2
117P5(x)− · · ·
=2
3P0(x)− 2
∞∑n=1
Pn(x)
(2n− 1) (2n+ 3).
Antes de entrar en el detalle de las propiedades de estos polinomios, hay que enfatizar que los Polinomiosde Legendre constituyen la unica base ortogonal para un espacio de Hilbert con un producto interno definidocomo el producto simple de funciones en el intervalo cerrado. Al ortonormalizar mediante Gram Schmidtla base
{1, x, x2, x3, · · · , xn, · · ·
}del espacio de polinomios, Pn, de grado n en el intervalo [−1, 1], con el
producto interno definido por∫ 1
−1dx f (x) g (x) se obtienen los polinomios de Legendre.
Los polinomios de Legendre surgen, originalmente, como soluciones a la ecuacion diferencial ordinaria deltipo
d
dx
[(1− x2
) dy
dx
]+ λ y = 0 , −1 ≤ x ≤ 1 .
o de manera equivalente a ecuaciones como
(1− x2)d2Pn(x)
dx2− 2x
dPn(x)
dx+ n(n+ 1) Pn(x) = 0 ,
donde y = Pn(x) y λ = n(n+ 1).La siguiente tabla muestra algunas ecuaciones diferenciales con sus respectivas soluciones
n Ecuacion de Legendre Solucion
0 (1− x2) d2P0(x)dx2 − 2x dP0(x)
dx = 0 P0(x) = 1
1 (1− x2) d2P1(x)dx2 − 2x dP1(x)
dx + 2 P1(x) = 0 P1(x) = x
2 (1− x2) d2P2(x)dx2 − 2x dP2(x)
dx + 6 P2(x) = 0 P2(x) = 1− 3x2
3 (1− x2) d2P3(x)dx2 − 2x dP3(x)
dx + 12 P3(x) = 0 P3(x) = x− 53x
3
4 (1− x2) d2P4(x)dx2 − 2x dP4(x)
dx + 20 P4(x) = 0 P4(x) = 1− 10x2 + 353 x
4
4.1.3. Relacion de Recurrencia
Supongamos que conocemos todos los polinomios de Legendre hasta Pn(x) y queremos generar el proximo.Obviamente ese polinomio sera de grado n + 1. Nos plantemos generarlo a partir de xPn(x). Como estos
140

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
polinomios son base del espacio de funciones, entonces
xPn(x) =
n+1∑k=0
2k + 1
2
[∫ 1
−1
Pk(t)tPn(t) dt
]Pk(x) ,
Observando con algo mas de detalle
xPn(x) =1
2
∫ 1
−1
tPn(t)dt+3
2
[∫ 1
−1
t2Pn(t)dt
]P1(x) +
5
4
[∫ 1
−1
(3t3 − t)Pn(t)dt
]P2(x)
+7
4
[∫ 1
−1
(5t4 − 3t2)Pn(t)dt
]P3(x) +
9
16
[∫ 1
−1
(35t5 − 30t3 + 3t)Pn(t)dt
]P4(x) + · · · .
Notemos que ∫ 1
−1
Pn(t)tPn(t)dt =
∫ 1
−1
tP 2n(t)dt ,
por lo tanto, el integrando es una funcion impar. Consideremos algunos casos:Para n = 0
xP0(x) =3
2
[∫ 1
−1
t2dt
]P1(x) = P1(x)
Para n = 1
xP1(x) =1
2
[∫ 1
−1
t2dt
]+
5
4
[∫ 1
−1
(3t4 − t2)dt
]P2(x) =
1
3+
2
3P2(x)
Para n = 2
xP2(x) =3
4
[∫ 1
−1
(3t4 − t2)dt
]P1(x) +
7
16
[∫ 1
−1
(5t3 − 3t)(3t3 − t)dt]P3(x)
=2
5P1(x) +
3
5P3(x) .
Para n = 3
xP3(x) =3
7P2(x) +
4
7P4(x) .
Se puede apreciar que ∫ 1
−1
Pn(x)xPk(x)dx = 0 , para k < n− 1 .
Esto implica que sobreviven unicamente tres terminos
xPn(x) = APn+1(x) +BPn−1(x) .
Desarrollando con la formula de Rodrıgues
x
n!2ndn
dxn(x2 − 1)n =
A
(n+ 1)!2n+1
dn+1
dxn+1(x2 − 1)n+1 +
B
(n− 1)!2n−1
dn−1
dxn−1(x2 − 1)n−1 ,
xdn
dxn(x2 − 1)n =
A
2(n+ 1)
dn+1
dxn+1(x2 − 1)n+1 + 2nB
dn−1
dxn−1(x2 − 1)n−1 .
141

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
Igualando coeficientes resulta
A =n+ 1
2n+ 1, B =
n
2n+ 1
La relacion de recurrencia se puede obtener entonces de:
(n+ 1)Pn+1(x) = (2n+ 1)xPn(x)− nPn−1(x) .
4.1.4. Norma de los Polinomios de Legendre
Conociendo que la ortogonalidad de los polinomios de Legendre y la relacion de recurrencia, procedemosencontrar el valor de su norma ∫ 1
−1
P 2n(x)dx =
2
2n+ 1
De la relacion de recurrencia cambiando n→ n− 1 se tiene
nPn(x) = (2n− 1)xPn−1(x)− (n− 1)Pn−2(x) ,
(2n+ 1)Pn(x)nPn(x) = (2n+ 1)Pn(x) [(2n− 1)xPn−1(x)− (n− 1)Pn−2(x)] , (4.1)
ahora multiplicamos la relacion de recurrencia por (2n− 1)Pn−1(x) para obtener
(2n− 1)Pn−1(x) (n+ 1)Pn+1(x) = (2n− 1)Pn−1(x) [(2n+ 1)xPn(x)− nPn−1(x)] , (4.2)
restando miembro a miembro (8.13) - (8.13) obtenemos :
(2n+ 1)[nP 2
n(x) + (n− 1)Pn(x)Pn−2(x)]− (2n− 1)
[(n+ 1)Pn−1(x)Pn+1(x) + nP 2
n−1(x)]
= 0 ,
lo que es igual a:
(2n+ 1)[nP 2
n(x) + (n− 1)Pn(x)Pn−2(x)]
= (2n− 1)[(n+ 1)Pn−1(x)Pn+1(x) + nP 2
n−1(x)],
P 2n(x) +
(n− 1)
nPn(x)Pn−2(x) =
2n− 1
2n+ 1
[(n+ 1)
nPn−1(x)Pn+1(x) + P 2
n−1(x)
],
integrando y considerando la ortogonalidad∫ 1
−1
P 2n(x)dx =
2n− 1
2n+ 1
[∫ 1
−1
P 2n−1(x)dx
]∫ 1
−1
P 2n(x)dx =
(2n− 1
2n+ 1
)[(2n− 3
2n− 1
)∫ 1
−1
P 2n−2(x)dx
]∫ 1
−1
P 2n(x)dx =
(2n− 1
2n+ 1
)[(2n− 3
2n− 1
)(2n− 5
2n− 3
)∫ 1
−1
P 2n−3(x)dx
]continuando con este proceso∫ 1
−1
P 2n(x)dx =
3
2n+ 1
[∫ 1
−1
P 21 (x)dx
]=
3
2n+ 1
[2
3
]∫ 1
−1
P 2n(x)dx =
2
2n+ 1.
142

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
4.1.5. Funcion Generatriz de los Polinomios de Legendre
Se puede encontrar una funcion generatriz P(t, x) de los polinomios de Legendre, es decir una funcionque tenga la forma:
P(t, x) =1√
1− 2xt+ t2= P0(x) + P1(x) t+ P2(x) t2 + · · · =
∞∑n=0
Pn(x) tn , |t| < 1 , |x| ≤ 1 ,
para la cual los Pn(x) son los coeficientes de su desarrollo en series de potencias. Esta serie converge para|2xt + t2| < 1. Para demostrar que el desarrollo en serie de la funcion G(t, x) tiene como coeficientes a losPn(x) partimos de que:
P(t, x) =1√
1− 2xt+ t2⇒ ∂P(t, x)
∂t=
t− x(1− 2xt+ t2)
3/2
combinando estas dos expresiones, resulta
(t− x)P(t, x) +(1− 2xt+ t2
) ∂P(t, x)
∂t= 0
y, consecuentemente
(t− x)
∞∑n=0
Pn(x) tn +(1− 2xt+ t2
) ∞∑n=1
nPn(x) tn−1 = 0 .
Multiplicando y acomodando queda
(t− x)P0(x) + (t− x)
∞∑n=1
Pn(x) tn +
∞∑n=1
nPn(x)tn−1 −∞∑n=1
2xnPn(x)tn +
∞∑n=1
nPn(x)tn+1 = 0 ,
(t− x)P0(x) +
∞∑n=1
Pn(x) tn+1 −∞∑n=1
xPn(x) tn +
∞∑n=1
nPn(x)tn−1 −∞∑n=1
2xnPn(x)tn
+
∞∑n=1
nPn(x)tn+1 = 0 ,
(t− x)P0(x) +
∞∑n=2
Pn−1(x) tn −∞∑n=1
xPn(x) tn +
∞∑n=0
(n+ 1)Pn+1(x)tn −∞∑n=1
2xnPn(x)tn
+
∞∑n=2
(n− 1)Pn−1(x)tn = 0 ,
(t− x)P0(x) +
∞∑n=0
(n+ 1)Pn+1(x)tn −∞∑n=1
(2n+ 1)xPn(x) tn +
∞∑n=2
nPn−1(x)tn = 0 ,
tP0(x) − xP0(x) + P1(x) + 2P2(x)t+
∞∑n=2
(n+ 1)Pn+1(x)tn − 3xP1(x)t−∞∑n=2
(2n+ 1)xPn(x) tn
+
∞∑n=2
nPn−1(x)tn = 0
143

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
por lo tantoP1(x)− x P0(x)︸ ︷︷ ︸=0
+
2P2(x)− 3xP1(x) + P0(x)︸ ︷︷ ︸=0
t+
∞∑n=2
(n+ 1)Pn+1(x)− (2n+ 1) xPn(x) + nPn−1(x)︸ ︷︷ ︸=0
tn = 0
El primero de los terminos se cumple siempre por cuanto P0(x) = 1 y P1(x) = x. El tercer terminoconforma la relacion de recurrencia para los polinomios de Legendre. Con esto queda demostrado que eldesarrollo en series de potencias de la funcion generatriz, tiene como coeficientes a los polinomios de Legendre.
La funcion generatriz muestra su utilidad en la expansion de
f(x) =
√1− x
2,
recordemos que por la definicion del producto interno se tiene∫ 1
−1
f(x)Pk(x)dx =
∫ 1
−1
√1− x
2Pk(x)dx .
Al formar el producto √1− x
2
[1√
1− 2xt+ t2
]=
√1− x
2
∞∑n=0
tnPn(x) ,
e integrando, se obtiene∫ 1
−1
√1− x
2
[1√
1− 2xt+ t2
]dx =
∞∑n=0
tn∫ 1
−1
√1− x
2Pn(x)dx
1
2t
[1 + t− (1− t)2
2√t
ln
(1 +√t
1−√t
)]=
∞∑n=0
tn∫ 1
−1
√1− x
2Pn(x)dx .
Expandiendo el lado izquierdo en series de potencias de t
4
3− 4
∞∑n=1
tn
(4n2 − 1) (2n+ 3)=
∞∑n=0
tn∫ 1
−1
√1− x
2Pn(x)dx
lo cual nos conduce, al igualar coeficientes a
4
3=
∫ 1
−1
√1− x
2P0(x)dx y
−4
(4n2 − 1) (2n+ 3)=
∫ 1
−1
√1− x
2Pn(x)dx
y finalmente a la forma de la expansion en series√1− x
2=
2
3P0(x)− 2
∞∑n=1
Pn(x)
(2n− 1) (2n+ 3)
144

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
Figura 4.1: Polinomios de Legendre
4.1.6. Otras propiedades de los polinomios de Legendre
Pn(1) = 1 y Pn(−1) = (−1)n. Entonces se tiene lo que se conoce como la relacion de paridad: Pn(−x) =(−1)nPn(x) para todo n.
Pn(x) tiene n raıces en el intervalo (−1, 1) Esta propiedad puede apreciarse para los primeros 5 poli-nomios en la figura 4.1.
Tienen una representacion integral de la forma
Pn(x) =1
2π
∫ π
0
[x+
√x2 − 1 cosϕ
]ndϕ
Cambios de variables inmediatos conllevan a ecuaciones diferenciales equivalentes
• Forma autoadjunta [(1− x2) y′
]′+ λ(λ+ 1) y = 0
• En coordenadas esfericas con u = Pn(cos(θ))
1
sen(θ)
d
dθ
(sen(θ)
du
dθ
)+ λ(λ+ 1)u = 0
• En coordenadas esfericas con u =√
sen θPn(cos θ)
d2u
dθ2+
[(λ+
1
2
)2
+1
4 sen2(θ)
]u = 0
145

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
Figura 4.2: Potencial electrostatico de un dipolo elactrico
4.1.7. Potencial Electrostatico de un Dipolo Electrico
En Fısica el ejemplo claro es el calculo del potencial electrostatico producido por dos cargas q1 = +q yq2 = −q separadas por una distancia 2d en un punto P cualquiera de un plano (x, y). El potencial en esepunto generico viene dado por
V = q
(1
R′− 1
R
)Tal y como puede apreciarse de la figura 4.2
(R′)2
= r2 + d2 − 2r d cos(θ) y R2 = r2 + d2 − 2r d cos (π − θ) ,
por lo cual
1
R′=
1
r
[1− 2 cos(θ)
(d
r
)+
(d
r
)2]−1/2
1
R=
1
r
[1− 2 cos (π − θ)
(d
r
)+
(d
r
)2]−1/2
y consecuentemente
1
R′=
1
r
∞∑n=0
Pn(cos(θ))
(d
r
)n1
R=
1
r
∞∑n=0
Pn [cos (π − θ)](d
r
)n=
1
r
∞∑n=0
Pn(− cos(θ))
(d
r
)nEl potencial sera
V =q
r
∞∑n=0
[Pn(cos(θ))− Pn(− cos(θ))]
(d
r
)n
146

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
donde todos los terminos pares de Pn(cos(θ)) se anulan y finalmente tendremos la expresion del potencialpara cualquier punto del plano
V =2q
r
∞∑n=0
P2n+1(cos(θ))
(d
r
)2n+1
Nos quedamos con el primer termino de la serie, si
d
r� 1 ⇒ V ≈ q
r22d cos(θ) .
4.1.8. Resumen de Propiedades Polinomios Legendre
Definicion: Pn(x) =1
n!2ndn
dxn(x2 − 1)n, n = 0, 1, 2, . . .
Ejemplos: P0 ≡ 1; P1 = x; P2 = 12 (3x2 − 1); P3 = 1
2 (5x3 − 3x)
Relacion de Recurrencia: (n+ 1)Pn+1(x) = (2n+ 1)xPn(x)− nPn−1(x)
Ecuaciones Diferenciales: (1− x2) y′′ − 2x y′ + λ(λ+ 1) y = 0
1
sen(θ)
d
dθ
(sen(θ)
du
dθ
)+ n(n+ 1)u = 0; u = Pn(cos(θ))
Funcion Generatriz: P(t, x) =1√
1− 2xt+ t2=
∞∑n=0
Pn(x) tn
Representacion Integral: Pn(x) =1
2π
∫ π
0
[x+√x2 − 1 cosϕ
]ndϕ
Ortogonalidad:
∫ 1
−1
Pα(x)Pβ(x)dx = δαβ2
2α+ 1Practicando con Maple:
> restart:
> plot([LegendreP(0,x),LegendreP(1,x),LegendreP(2,x),LegendreP(3,x),
LegendreP(4,x)],x=-1..1);
4.1.9. Polinomios de Hermite
Los polinomios de Hermite a diferencia de los de Legendre (y Tchevychev), vienen definidos en todala recta real, vale decir, x ∈ (−∞,∞), por lo cual la funcion peso w(x) en el producto interno deberadecrecer mas rapido que |x|n, para garantizar que la norma de los vectores en este espacio vectorial sea
finita. La funcion mas simple que cumple estos requisitos es w(x) = e−x2
(tambien algunos autores utilizan
w(x) = e−x2/2) Esto es, el producto interno entre los polinomios de Hermite vendra definido como∫ ∞
−∞dx w(x)f(x)g(x) =
∫ ∞−∞
dx e−x2
f(x)g(x) .
147

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
Otra vez, para este producto interno, si ortogonalizamos con Gram-Schmidt se obtienen los polinomios deHermite. Al igual que el resto de los polinomios ortogonales, existe una formula de Rodrigues para lospolinomios de Hermite
Hn(x) = (−1)n ex2 dn
dxne−x
2
,
los cinco primeros polinomios de Hermite son los siguientes:
H0(x) = 1, H1(x) = 2x
H2(x) = 4x2 − 2, H3(x) = 8x3 − 12x,
H4(x) = 16x4 − 48x2 + 12 H5(x) = 32x5 − 160x3 + 120x
4.1.10. Generalidades de los Polinomios de Hemite
Los polinomios de Hermite seran ortogonales, pero no normales∫ ∞−∞
e−x2
Hβ(x)Hα(x)dx = 2αα!√π δαβ ,
por lo tanto: ∫ ∞−∞
e−x2
H2α(x)dx = 2αα!
√π .
Donde la funcion delta de Kronecker es δαβ = 0 si α 6= β; y δββ = 1.Antes de desarrollar funciones en terminos de los polinomios de Hermite, expondremos un par de teoremas
sin demostracion.
Teorema 1: Sean f y g dos funciones arbitrarias, cuando menos continuas a trozos en (−∞,∞) y quecumplen con ∫ ∞
−∞e−x
2
f2(x)dx ∃ ∧∫ ∞−∞
e−x2
g2(x)d ∃
Entonces el conjunto de estas funciones forman un espacio vectorial euclideano Iw2 con un producto internodefinido por ∫ ∞
−∞e−x
2
f(x)g(x)dx
Las funciones f(x) y g(x) se denominan cuadrado-integrables respecto al peso w. Es por ello que denotamosel espacio de funciones como Iw2 .
Teorema 2: Si f(x) es una funcion continua arbitraria en Iw2 entonces puede ser aproximada por unpolinomio en ese mismo espacio. Es decir
lımn→∞
|f(x)− pn(x)| = lımn→∞
(∫ ∞−∞
e−x2
[f(x)− pn(x)]2
dx
)1/2
= 0
Ası, la expresion de una funcion arbitraria en la base de los polinomio de Hermite se reduce a
f(x) =
∞∑k=0
1
2kk!√π
[∫ ∞−∞
e−t2
f(t)Hk(t) dx
]Hk(x) ,
donde
ak =1
2kk!√π
∫ ∞−∞
e−t2
f(t)Hk(t) dx .
148

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
Ejemplo: Si f(x) = x2
f(x) = x2 =
2∑k=0
bkxk =
∞∑k=0
ak Hk(x)
f(x) = x2 = a0H0(x) + a1H1(x) + a2H2(x)
= a0 + a1(2x) + a2(4x2 − 1)
= (a0 − a2) + 2a1x+ 4a2x2 ⇒ a0 =
1
4, a1 = 0 , a2 =
1
4.
=1
4H0(x) +
1
4H2(x)
Si generalizamos para funciones del tipo f(x) = x2p con p = 1, 2, 3, · · · , entonces
f(x) = x2p =
2p∑k=0
bkxk =
∞∑k=0
a2k H2k(x) ,
por lo tanto
a2k =1
22k(2k)!√π
∫ ∞−∞
e−x2
x2pH2k(x)dx =1
22k(2k)!√π
∫ ∞−∞
x2p d2k
dx2ke−x
2
dx .
Una integracion por partes estrategica muestra que:
a2k =1
22k(2k)!√π
{x2p d2k−1
dx2k−1e−x
2
∣∣∣∣∞−∞−∫ ∞−∞
2px2p−1 d2k−1
dx2k−1e−x
2
dx
}.
El primer termino de la resta se anula debido a la definicion de los polinomios de Hermite
x2p d2k−1
dx2k−1e−x
2
∣∣∣∣∞−∞
= x2p(−1)2k−1e−x2
H2k−1(x)∣∣∣∞−∞
.
Repitiendo el proceso 2k veces, tendremos
a2k =1
22k(2k)!√π
(2p)!
(2p− 2k)!
∫ ∞−∞
x2p−2k e−x2
dx
si en la integral hacemos x =√t obtenemos
a2k =1
22k(2k)!√π
(2p)!
(2p− 2k)!
∫ ∞−∞
tp−k e−tdt
2√t
=1
22k+1(2k)!√π
(2p)!
(2p− 2k)!
∫ ∞−∞
tp−k−12 e−tdt
y utilizando la definicion Γ (z) ≡∫∞
0e−ttz−1dt ≡ (z − 1)! , queda como
a2k =1
22k+1(2k)!√π
(2p)!
(2p− 2k)!Γ
(p− k +
1
2
).
149

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
Ahora, recurrimos a la propiedad de “duplicacion” de la Funcion Gamma, i.e.
22z−1Γ (z) Γ
(z +
1
2
)=√πΓ (2z)
tenemos que
22p−2kΓ
(p− k +
1
2
)(p− k)! =
√π (2p− 2k)!
quedan entonces los coeficientes determinados como
a2k =(2p)!
22p+1(2k)! (p− k)!
y, por lo tanto el desarrollo en la base de los polinomios de Hermite
f(x) = x2p =(2p)!
22p+1
p∑k=0
H2k(x)
(2k)! (p− k)!−∞ < x <∞ .
Muestre que del mismo modo se puede encontrar
f(x) = x2p+1 =(2p− 1)!
22p−1
p∑k=0
H2k+1(x)
(2k + 1)! (p− k)!−∞ < x <∞ .
Si f(x) = e−a2x2
con Re a2 > −1. Otra vez
f(x) = e−a2x2
=
∞∑k=0
a2k H2k(x)
entonces
a2k =1
22k(2k)!√π
∫ ∞−∞
e−(a2+1)x2
H2k(x)dx
Sustituyendo H2k(x) por su expresion integral tendremos
a2k =1
22k(2k)!√π
∫ ∞−∞
e−(a2+1)x2
[22k+1(−1)kex
2
√π
∫ ∞0
e−t2
t2k cos 2xt dt
]dx
=2(−1)k
π(2k)!
∫ ∞−∞
e−a2x2
[∫ ∞0
e−t2
t2k cos 2xt dt
]dx
≡ 2(−1)k
π(2k)!
∫ ∞0
e−t2
t2k[∫ ∞−∞
e−a2x2
cos 2xt dx
]dt
=2(−1)k
π(2k)!
∫ ∞0
e−t2
t2k[√
π
a2e−t
2/a2
]dt =
=2(−1)k√π(2k)!a
∫ ∞0
e−t2(1+a−2) t2k dt
=(−1)k√π(2k)!
a2k
(1 + a2)k+1/2
∫ ∞0
e−s sk−12 ds ← t2(1 + a−2) = s
=(−1)k√π(2k)!
a2k
(1 + a2)k+1/2
Γ
(k +
1
2
)
150

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
y ahora usando, otra vez la propiedad de “duplicacion” de la funcion gamma,
22kΓ
(k +
1
2
)k! =
√π (2k)!
obtenemos
a2k =(−1)ka2k
22k k! (1 + a2)k+1/2
por lo tanto
f(x) = e−a2x2
=
∞∑k=0
(−1)ka2k
22k k! (1 + a2)k+1/2
H2k(x)
Al igual que los polinomios de Legendre, los de Hermite, surgen tambian en sus orıgenes como solucionesa la ecuacion diferencial ordinaria del tipo
d2Hn(x)
dx2− 2x
dHn(x)
dx+ nHn(x) = 0
Vale decir:
n Ecuacion de Hermite Solucion
0d2H0(x)
dx2− 2x
dH0(x)
dx= 0 H0(x) = 1
1d2H1(x)
dx2− 2x
dH1(x)
dx+ 2H1(x) = 0 H1(x) = 2x
2d2H2(x)
dx2− 2x
dH2(x)
dx+ 4H2(x) = 0 H2(x) = 4x2 − 2
3d2H3(x)
dx2− 2x
dH3(x)
dx+ 6H3(x) = 0 H3(x) = 8x3 − 12x
4d2H4(x)
dx2− 2x
dH4(x)
dx+ 8H4(x) = 0 H4(x) = 16x4 − 48x2 + 12
4.1.11. Funcion Generatriz de los Polinomios de Hermite
Se puede encontrar una funcion generatriz H(t, x) de los polinomios de Hermite:
H(t, x) = e2xt−t2 = H0(x) +H1(x) t+H2(x)
2t2 +
H3(x)
3!t2 + · · · =
∞∑n=0
Hn(x)
n!tn
para la cual los Hn(x) son los coeficientes de su desarrollo en series de potencias. Es facil darse cuenta queesta expresion proviene del desarrollo en Serie de Taylor
H(t, x) = e2xt−t2 =
∞∑n=0
1
n!
[∂nH(t, x)
∂tn
]t=0
tn ‖t‖ <∞
para lo cual [∂nH(t, x)
∂tn
]t=0
= ex2
[∂n
∂tne−(x−t)2
]t=0
= (−1)nex
2
[dn
dune−(u)2
]u=x
= Hn(x)
151

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
4.1.12. Relacion de Recurrencia
A partir de la funcion generatriz se puede construir la siguiente identidad
∂H(t, x)
∂t= (2x− 2t)H
y utilizando el desarrollo en series de potencias en t tendremos,
∞∑n=1
Hn(x)
n!ntn−1 = 2x
∞∑n=0
Hn(x)
n!tn −
∞∑n=0
Hn(x)
n!tn+1 ,
∞∑n=1
Hn(x)
n!ntn−1 − 2x
∞∑n=0
Hn(x)
n!tn +
∞∑n=0
Hn(x)
n!tn+1 = 0 ,
∞∑n=0
Hn+1(x)
(n+ 1)!(n+ 1)tn − 2x
∞∑n=0
Hn(x)
n!tn +
∞∑n=1
Hn−1(x)
(n− 1)!tn = 0 ,
H1(x) +
∞∑n=1
Hn+1(x)
(n+ 1)!(n+ 1)tn − 2xH0(x)− 2x
∞∑n=1
Hn(x)
n!tn +
∞∑n=1
Hn−1(x)
(n− 1)!tn = 0 ,
H1(x)− 2xH0(x)︸ ︷︷ ︸=0
+
∞∑n=1
[Hn+1(x)
(n+ 1)!(n+ 1)− 2x
Hn(x)
n!+Hn−1(x)
(n− 1)!
]tn = 0 ,
es decir:
∞∑n=1
Hn+1(x)
(n+ 1)!(n+ 1)− 2x
Hn(x)
n!+Hn−1(x)
(n− 1)!︸ ︷︷ ︸=0
tn = 0 .
Por lo tanto:Hn+1(x)
n!− 2x
Hn(x)
n!+Hn−1(x)
(n− 1)!= 0
Ası la relacion de recurrencia sera
Hn+1(x)− 2xHn(x) + 2nHn−1(x) = 0
De igual modo, podemos partir de otra identidad
∂H(t, x)
∂x= 2t H ⇒
∞∑n=0
H ′n(x)
n!tn = 2
∞∑n=0
Hn(x)
n!tn+1 ,
es decir:∞∑n=1
H ′n(x)
n!tn = 2
∞∑n=1
Hn−1(x)
(n− 1)!tn ⇒ H ′n(x)
n!= 2
Hn−1(x)
(n− 1)!
y encontrar una relacion para generar las derivadas de los polinomios de Hermite en termino de ellos mismos:
H ′n(x) = 2n Hn−1(x), n = 1, 2, 3, · · · .
Finalmente, utilizando la ecuacion anterior en la relacion de recurrencia y derivando esa expresion unavez mas, queda como:
Hn+1(x)− 2xHn(x) +H ′n(x) = 0
H ′′n(x)− 2xH ′n(x) + 2n Hn(x) = 0
152

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
con lo cual queda demostrado que los polinomios de Hermite son una solucion particular de esa ecuaciondiferencial.
y′′ − 2xy′ + 2ny = 0,
Donde hemos hecho y = Hn(x) Adicionalmente, podremos demostrar que y = e−x2/2Hn(x) es solucion de la
ecuacion diferencial autoadjuntay′′ +
(2n+ 1− x2
)y = 0 .
4.1.13. Ortogonalidad y Norma de los Polinomios de Hermite
En general estos polinomios cumplen con∫ ∞−∞
e−x2
Hβ(x)Hα(x)dx = 2αα!√πδαβ .
Donde la funcion delta de Kronecker es δαβ = 0 si α 6= β; y δββ = 1. Para demostrar el caso α 6= β partimosde
uβ[u′′α +
(2α+ 1− x2
)uα]
= 0
uα[u′′β +
(2β + 1− x2
)uβ]
= 0
restando miembro a miembro e integrando se tiene que:[u′αuβ − u′βuα
]′+ 2 (α− β)uαuβ = 0
(α− β)
∫ ∞−∞
e−x2
Hα(x)Hβ(x)dx = 0∫ ∞−∞
e−x2
Hα(x)Hβ(x)dx = 0 α 6= β;
ya que
e−x2/2 {2α Hα−1(x)Hβ(x)− 2β Hβ−1(x)Hα(x)}
∣∣∣∞−∞
= 0
Para encontrar el valor de la norma, procedemos a partir de la relacion de recurrencia
Hn(x) [Hn(x)− 2xHn−1(x) + 2(n− 1)Hn−2(x)] = 0
Hn−1(x) [Hn+1(x)− 2xHn(x) + 2nHn−1(x)] = 0
restando miembro a miembro, multiplicando por e−x2
e integrando entre (−∞,∞) se obtiene∫ ∞−∞
e−x2
H2α(x)dx = 2α
∫ ∞−∞
e−x2
H2α−1(x)dx
repitiendo la operacion y recordando que al final queda∫ ∞−∞
e−x2
x2dx = 2√π
Obtenemos ∫ ∞−∞
e−x2
H2α(x)dx = 2αα!
√π
153

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
Figura 4.3: Polinomios de Hermite
4.1.14. Representacion Integral de los Polinomios de Hermite
Los polinomios de Hermite pueden ser representados como
Hn(x) =2n(−i)nex2
√π
∫ ∞−∞
e−t2+2itxtndt
que puede ser separada como
H2n(x) =22n+1(−1)nex
2
√π
∫ ∞0
e−t2
t2n cos(2xt)dt , n = 1, 2, 3, · · ·
y para los terminos impares
H2n+1(x) =22n+2(−1)nex
2
√π
∫ ∞0
e−t2
t2n+1sen(2xt)dt , n = 1, 2, 3, · · ·
La forma de llegar a cualquiera de estas ultimas formulas se parte de las conocidas integrales desarrolladasen el plano complejo
e−x2
=2√π
∫ ∞−∞
e−t2
cos(2xt)dt
se deriva 2n veces a ambos miembros se utiliza la definicion de los polinomios de Hermite.
4.1.15. El Oscilador armonico, independiente del tiempo, en Mecanica Cuanti-ca.
La Ecuacion de Schrodinger independiente del tiempo y en una dimension es
d2
dx2ψ(x) +
2µ
~2[E − U(x)]ψ(x) = 0 ,
154

Borra
dor Pre
limin
ar
4.1. SERIES DE POLINOMIOS ORTOGONALES
con µ la “masa” de la partıcula; E los niveles de energıa y U(x) el potencial al cual esta sometida la partıcula.En el caso que estudiemos un potencial del tipo U(x) = 1
2µω2x2 en el cual la frecuencia angular del oscilador
viene representada por ω. La ecuacion de Schrodinger se convierte en
d2
dx2ψ(x) +
2µ
~2
[E − 1
2µω2x2
]ψ(x) = 0 ,
haciendo un cambio de variable ξ = x√µω/~ para adimensionalizar la ecuacion de Schrodinger, se obtiene
ψ′′(ξ) +
[2E
~ω− ξ2
]ψ(ξ) = 0 ,
la cual corresponde a la forma autoadjunta de la Ecuacion de Hermite:
ψ′′(ξ) +[2n+ 1− ξ2
]ψ(ξ) = 0 ,
y por lo tanto identificamos2E
~ω= 2n+ 1 ⇒ E =
(n+
1
2
)~ω ,
con lo cual comprobamos la forma como viene cuantizada la energıa en este sistema y la energıa del estadofundamental. Por su parte, la funcion de onda se podra expresar en la base de soluciones de esa ecuacion
ψ(ξ) =
∞∑n=0
cn ψn(ξ) =
∞∑n=0
cn e−ξ2/2Hn(ξ) .
Si mantenemos la normalizacion∫ ∞−∞
ψ2n(ξ)dξ = 1 con cn =
(µωπ~
)1/4 1√2nn!
.
155

Borra
dor Pre
limin
ar
4.2. PLANTEAMIENTO GENERAL PARA POLINOMIOS ORTOGONALES
4.1.16. Resumen de Propiedades Polinomios Hermite
Definicion: Hn(x) = (−1)nex2 dn
dxne−x
2
, n = 0, 1, 2, . . .
Hn(x) =
n/2∑k=0
(−1)kn!
k! (n− 2k)!(2x)
n−2k
Ejemplos: H0(x) = 1; H1(x) = 2x; H2(x) = 4x2 − 2; H3(x) = 8x3 − 12x
Relaciones de Recurrencia: H0(x) = 1; H1(x) = 2x; H2(x) = 4x2 − 2
H ′n(x) = 2n Hn−1(x), n = 1, 2, 3, . . .
Ecuaciones Diferenciales: y′′ − 2xy′ + 2ny = 0
u′′ +(2n+ 1− x2
)u = 0; u(x) = e−x
2/2Hn(x)
Funcion Generatriz: H(t, x) = e2xt−t2 =
∞∑n=0
Hn(x)
n!tn
Representacion Integral: H2n(x) =22n+1(−1)nex
2
√π
∫ ∞0
e−t2
t2n cos(2xt) dt
H2n+1(x) =22n+2(−1)nex
2
√π
∫ ∞0
e−t2
t2n+1sen(2xt) dt
Ortogonalidad: 2αα!√π δαβ =
∫ ∞−∞
e−x2
Hβ(x)Hα(x)dx
Practicando con Maple:> restart: with(orthopoly):
> plot([H(0,x), H(1,x), H(2,x), H(3,x), H(4,x)], x=-3..3,y=-25..25);
4.1.17. Ejemplos
4.1.18. Practicando con Maxima
4.1.19. Ejercicios
4.2. Planteamiento General para Polinomios Ortogonales
Hemos considerado un par de ejemplos de Polinomios Ortogonales. En ambos podemos idenficar algunascaracterısticas comunes. En base a estas caracterısticas comunes definiremos otras familias de polinomiosortogonales.† En el caso de los polinomios de Jacobi, la norma es
hn =2α+β+1
2n+ α+ β + 1
Γ(n+ α+ 1)Γ(n+ β + 1)
n!Γ(n+ α+ β + 1)con α > −1 y β > −1 .
156

Borra
dor Pre
limin
ar
4.2. PLANTEAMIENTO GENERAL PARA POLINOMIOS ORTOGONALES
Nomenclatura Nombre a b w(x) hn h0
Pn(x) Legendre −1 1 12
2n+ 1
Tn(x) Tchebychev 1E −1 11√
1− x2
π
2π
Un(x) Tchebychev 2E −1 1√
1− x2π
2Hn(x) Hermite −∞ ∞ e−x
2
2nn!√π
Ln(x) Laguerre 0 ∞ e−x 1
Lαn(x) Laguerre G 0 ∞ xαe−x con α > −1 Γ(n+α+1)n!
Pαβn (x) Jacobi −1 1 (1− x)α(1 + x)β †
Cuadro 4.1: Propiedades genericas de los Polinomios Ortogonales, Nn indica la norma del polinomio de gradon.
4.2.1. Producto interno generico, norma y ortogonalidad
Los polinomios ortogonales se definen como un conjunto de polinomios {pn(x)} de orden n definidos enun determinado intervalo a ≤ x ≤ b, los cuales son ortogonales respecto a una definicion de producto interno∫ b
a
w(x)pm(x)pn(x)dx = hnδnm con w(x) > 0 una funcion peso en a ≤ x ≤ b
que garantiza que la norma sea finita en ese intervalo. Dado que el Teorema de Weierstrass garantiza que elconjunto de polinomios {1, x, x2, · · · , xn, · · · } es una base completa para un espacio vectorial E∞, se procedea ortogonalizar esa base con la definicion de producto interno y el intervalo que corresponda. Para cada casotendremos una base ortogonal de polinomios.
Polinomio µn w(x) q(x)
Pn 2nn! 1 1− x2
Tn(−1)n√
π2n+1Γ
(n+ 1
2
) 1√1− x2
1− x2
Un(−1)n
(n+ 1)√π
2n+1Γ(n+ 3
2
) √1− x2 1− x2
Hn (−1)n e−x2
1Ln n! e−x xLαn n! xαe−x x
Cuadro 4.2: Funciones para determinar la Formula de Rodrigues generalizada
En el cuadro 4.1 resumimos las propiedades mas resaltantes, com lo son: la funcion peso en el productointerno, el intervalo en el cual estan definidas estas fuciones y su norma.
4.2.2. Formula de Rodrigues genelarizada
En general todos los polinomios ortogonales {pn(x)} vienen definidos por la formula de Rodrigues gene-ralizada
pn(x) =1
w(x)µn
dn
dxn(w(x)q(x)n)
157

Borra
dor Pre
limin
ar
4.2. PLANTEAMIENTO GENERAL PARA POLINOMIOS ORTOGONALES
donde w(x), q(x) y µn vienen especficados en el cuadro 4.2 para cada conjunto de polinomios ortogonales
4.2.3. Ejemplos de Polinomios Ortogonales
Utilizando la formula de Rodrigues generalizada, podemos construir algunos polinomios generalizados.El cuadro 4.3 muestra algunos de ejemplos de estos polinomios ortogonales
Polinomio n = 0 n = 1 n = 2 n = 3 n = 4
Pn 1 x1
2(3x2 − 1)
1
2(5x3 − 3x)
1
8(35x4 − 30x2 + 3)
Tn 1 x 2x2 − 1 4x3 − 3x 8x4 − 8x2 + 1Un 1 2x 4x2 − 1 8x3 − 4x 16x4 − 12x2 + 1Hn 1 2x 4x2 − 2 8x3 − 12x 16x4 − 48x2 + 12
Ln 1 1− x 1
2x2 − 2x+ 1 −1
6(x3 − 9x2 + 18x− 6)
1
24(x4 − 16x3 + 72x2 − 96x+ 24)
Cuadro 4.3: Ejemplos de Polinomios Ortogonales
4.2.4. Relaciones de Recurrencia
Tambien se pueden formular, de manera generica las relaciones de recurrencia. Obviamente, las relacionesde recurrencia tambien constituyen una forma alternativa de ir construyendo los polinomios ortogonales. Ası,un polinomio ortogonal generico, pn(x), cumplira
pn+1(x) = (an + xbn)pn(x)− cnpn−1(x)
El cuadro 4.4 contiene las expresiones de los coeficientes para construir las relaciones de recurrencia genera-lizadas para cada uno de los polinomios
Polinomio an bn cn
Pn 02n+ 1
n+ 1
n
n+ 1Tn 0 2 1Un 0 2 1Hn 0 2 2n
Ln2n+ 1
n+ 1− 1
n+ 1
n
n+ 1
Lαn2n+ 1 + α
n+ 1− 1
n+ 1
n+ α
n+ 1
Cuadro 4.4: Funciones para determinar la Relacion de Recurrencia Generalizada
4.2.5. Funcion generatriz generalizada
Para todos los polinomimos ortogonales podemos definir una funcion generatriz G(x, t), de tal maneraque cada uno de los polinomios ortogonales {pn(x)} sera proporcional al coeficiente de tn del desarrollo en
158

Borra
dor Pre
limin
ar
4.2. PLANTEAMIENTO GENERAL PARA POLINOMIOS ORTOGONALES
series de Taylor, en potencias de t alrededor del punto x = 0. Esta funcion generatriz que constituye unaforma alternativa de definir los polinomios ortogonales viene expresada por la serie
G(x, t) =
∞∑n=0
Cnpn(x) tn con an constante
Las funciones generatrices no son exclusivas de los polinomios ortogonales. Como veremos mas adelante,existen funciones generatrices para las funciones de Bessel.
Polinomio Cn G(x, t)
Pn 11√
1− 2xt+ t2
Tn 21− t2
1− 2xt+ t2+ 1
Un 11
1− 2xt+ t2
Hn 1/n! e2xt−x2
H2n 1n/(2n)! cos(2xt)et2
H2n+1 1n/(2n+ 1)! sen(2xt)et2
Ln 11
1− te−
xt
1− t
Lαn 11
(1− t)αe−
xt
1− t
Cuadro 4.5: Funciones para determinar la funcion generatriz generalizada
4.2.6. Ecuacion diferencial para los Polinomios Ortogonales
Cada uno de los polinomios ortogonales habra de ser solucion de una ecuacion diferencial ordinaria de laforma
g2(x)d2pn(x)
dx2+ g1(x)
dpn(x)
dx+ αnpn(x) = 0
En el cuadro 4.6 mostramos las expresiones para los coeficientes de las ecuaciones correspondientes a lasecuaciones diferenciales para las cuales cada uno de los polinomio ortogonales es solucion
4.2.7. Aplicaciones para los polinomios ortogonales
Interpolacion polinomial de puntos experimentales
Muchas veces nos encontramos con la situacion en la cual tenemos un conjunto de n medidas o puntosexperimentales {(x1, y1) = f(x1), (x2, y2) = f(x2), · · · , (xn, yn) = f(xn)} y para modelar ese experimentoquisieramos una funcion que ajuste estos puntos. El tener una funcion nos provee la gran ventaja de poderintuir o aproximar los puntos que no hemos medido. La funcion candidata mas inmediata es un polinomioy debemos definir el grado del polinomio y la estrategia que aproxime esos puntos. Si queremos aproximaresos puntos por una recta el Metodo de Mınimos Cuadrados es el mas utilizado.
Puede ser que el polinomio no sea lineal y sea necesarios ajustar esos puntos a un polinomio tal queeste pase por los puntos experimentales. Queda entonces por decidir la estrategia. Esto es, ajustamos la
159

Borra
dor Pre
limin
ar
4.2. PLANTEAMIENTO GENERAL PARA POLINOMIOS ORTOGONALES
Polinomio g2(x) g1(x) αn
Pn 1− x2 −2x n(n+ 1)Tn 1− x2 −x n2
Un 1− x2 −2x n(n+ 1)Hn 1 −2x 2nLn x 1− x nLαn x 1− x+ α nPαβn 1− x2 β − α− x(2 + α+ β) n(n+ α+ β + 1)
Cuadro 4.6: Funciones para determinar la ecuacion diferencial para la cual son solucion los polinomiosortogonales
funcion como “trozos” de polinomios que a su vez se ajusten a subconjuntos: {(x1, y1) = f(x1), (x2, y2) =f(x2), · · · , (xm, ym) = f(xm)}, con m < n, de los puntos experimentales En este caso tendremos una funcionde ajuste, para cada conjunto de puntos.
Tambien podemos ajustar la funcion a todo el conjunto de puntos experimentales y, en ese caso, elmaximo grado del polinomio que los ajuste sera n− 1. Para encontrar este polinomio lo expresaremos comouna combinacion lineal de Polinomios de Legendre. Esto es:
P(x) = f(x) =
n−1∑k=0
CkPk(x) ⇒
y1 = f(x1) = C0P0(x1) + C1P1(x1) + · · ·+ Cn−1Pn−1(x1)y2 = f(x2) = C0P0(x2) + C1P1(x2) + · · ·+ Cn−1Pn−1(x2)...yn = f(xn) = C0P0(xn) + C1P1(xn) + · · ·+ Cn−1Pn−1(xn)
que no es otra cosa que un sistema de n ecuaciones con n incognitas: los coeficientes {C0, C1, · · ·Cn−1} Alresolver el sistema de ecuaciones y obtener los coeficientes, podremos obtener la funcion polinomica queinterpola esos puntos.
Una expansion equivalente se pudo haber logrado con cualquier otro conjunto de polinomios ortogonales,ya que ellos son base del espacio de funciones. Es importante hacer notar que debido a que los polinomios deLegendre estan definidos en el intervalo [−1, 1] los puntos experimentales deberan re-escalarse a ese intervalopara poder encontrar el polinomio de interpolacion como combinacion lineal de los Polinomios de Legendre.Esto se puede hacer con la ayuda del siguiente cambio de variable:
x =(b− a)t+ b+ a
2, dx =
b− a2
dt
Consideremos los puntos experimentales representado en la figura 4.4. Al construir el sistema de ecua-ciones obtendremos: (a = 2 y b = 12)
(−1, 8)⇒ 8 = C0 − C1 + C2 − C3 + C4 − C5(− 3
5 , 10)⇒ 10 = C0 − 3
5 C1 + 125 C2 + 9
25 C3 − 51125 C4 + 477
3125 C5(− 1
5 , 11)⇒ 11 = C0 − 1
5 C1 − 1125 C2 + 7
25 C3 + 29125 C4 − 961
3125 C5(15 , 18
)⇒ 18 = C0 + 1
5 C1 − 1125 C2 − 7
25 C3 + 29125 C4 + 961
3125 C5(35 , 20
)⇒ 20 = C0 + 3
5 C1 + 125 C2 − 9
25 C3 − 51125 C4 − 477
3125 C5
(1, 34)⇒ 34 = C0 + C1 + C2 + C3 + C4 + C5
160

Borra
dor Pre
limin
ar
4.2. PLANTEAMIENTO GENERAL PARA POLINOMIOS ORTOGONALES
2 4 6 8 10 12
10
15
20
25
30
x
f(x)
K1.0 K0.5 0.0 0.5 1.0
10
15
20
25
30
x
f(x)
Figura 4.4: En el lado izquierdo se muestran el conjunto de puntos experimentales:{(2, 8), (4, 10), (6, 11), (8, 18), (10, 20), (12, 34)} y a la derecha la funcion polinomica que los interpola.
y al resolver el sistema obtendremos que
C0 =2249
144, C1 =
3043
336, C2 =
1775
504, C3 = −175
216, C4 =
625
336, C5 =
14375
3024
con lo cual
P(x) = f(x) =2249
144+
3043
336x+
1775
504P (2, x)− 175
216P (3, x) +
625
336P (4, x) +
14375
3024P (5, x)
la interpolacion queda representada en al figura 4.4.Es importante se nalar que mientras mas puntos experimentales se incluyan para la interpolacion, el
polinomio resultante sera de mayor grado y, por lo tanto incluira oscilaciones que distorcionaran una apro-ximacion mas razonable. Por ello, la estrategia de hacer la interpolacion a trozos, digamos de tres puntos entres puntos, generara un mejor ajuste, pero sera una funcion (polinomio) continua a trozos.
Practicando con Maple:> restart: with(plots):
> pointplot([2,8],[4,10],[6,11],[8,18],[10,20],[12,34]);
>> P:=pointplot([-1,8],[-3/5,10],[-1/5,11],[1/5,18],[3/5,20],[1,34]):
> eq1:=C0-C1+C2-C3+C4-C5=8:
> eq2:=C0-3/5*C1+1/25*C2+9/25*C3-51/125*C4+477/3125*C5=10:
> eq3:=C0-1/5*C1-11/25*C2+7/25*C3+29/125*C4-961/3125*C5=11:
> eq4:=C0+1/5*C1-11/25*C2-7/25*C3+29/125*C4+961/3125*C5=18:
> eq5:=C0+3/5*C1+1/25*C2-9/25*C3-51/125*C4-477/3125*C5=20:
> eq6:=C0+C1+C2+C3+C4+C5=34:
> s:=solve(eq1,eq2,eq3,eq4,eq5,eq6,[C0,C1,C2,C3,C4,C5]);assign(s);
> f:=C0 + C1*x + C2*LegendreP(2,x) + C3*LegendreP(3,x) + C4*LegendreP(4,x)+
C5*LegendreP(5,x);
> F:=plot(f,x=-1..1):
> display(F, P);
161

Borra
dor Pre
limin
ar
4.2. PLANTEAMIENTO GENERAL PARA POLINOMIOS ORTOGONALES
Cuadratura de Gauss-Legendre
Una de los usos mas comunes de los polinomios ortogonales es la de aproximar funciones, en particularintegrales que requieren ser resueltas numericamente. La idea es aproximar una integral, para una funcionf(x), definida en el intervalo [a, b] y suficientemente bien comportada, por una suma finita de terminosckf(xk) y estimar el error que cometemos en esta aproximacion. Esto es:∫ b
a
f(x)dx =
N∑k=1
ckf(xk) + EN (4.3)
Notese que la intencion es utilizar la funcion a integrar evaluada en un conjunto de puntos estrategicos paralos cuales estan definidos unos coeficientes, tambien inteligentemente seleccionados. Es decir se requieren 2Nnumeros (ck y los xk con k = 1, 2, · · ·N). Mas aun, esas 2N cantidades pueden ser seleccionadas de formatal que la aproximacion es exacta EN = 0 cuando f(x) es un polinomio de grado ≤ 2N − 1.
Supongamos, para empezar que la funcion f(x) esta definida para x ∈ [−1, 1]2 y por lo tanto los polinomiosortogonales que seleccionaremos para aproximar la integral (y la funcion) seran los del Legendre (igualpudimos haber utilizado los polinomios de Tchebychev), con lo cual
f(x) =
∞∑k=0
akPk(x) ,
donde:
ak =
(k +
1
2
)∫ 1
−1
dx f(x)Pk(x) y a0 =1
2
∫ 1
−1
dx f(x) .
Con lo cual ∫ 1
−1
f(x)dx ≈N∑k=1
ckf(xk) =
N∑k=1
ck
∞∑n=0
anPn(xk) =
∞∑n=0
an
N∑k=1
ckPn(xk) .
Quedan todavıa por determinar los pesos ck y los puntos xk. Para ello procedemos de la siguiente forma.Notamos que PN (x) tiene N raıces, x = xj , en el intervalo −1 ≤ x ≤ 1. Entonces, si seleccionamos esospuntos x = xj para evaluar la funcion f(xk) se anulan el coeficiente para el termino aN y, ademas podremosencontrar los pesos ck resolviendo el sistema de N ecuaciones de la forma
N∑j=1
cjP0(xj) =
N∑j=1
cj = 2 ∧N∑j=1
cjPk(xj) = 0 para k = 1, 2, · · ·N − 1
donde los Pk(xj) son los distintos polinomios evaluados en las raıces del polinomio de gradoN , i.e. PN (xj) = 0Se puede demostrar que la solucion de este sistema provee los pesos escritos de la forma
cj =2
(1− x2j ) (P ′N (xj))
2 , donde: P ′N (xj) =dPN (x)
dx
∣∣∣∣x=xj
Mas aun, podremos escribir∫ 1
−1
f(x)dx ≈N∑k=1
ckf(xk) = 2a0 + EN con EN =
∞∑n=N+1
an
N∑k=1
ckPn(xk) ,
2Esta no es una limitacion muy severa porque siempre podemos hacer, como ya vimos, un cambio de variable del tipo
x =(b−a2
)t+
(b+a2
)y convertir cualquier intervalo cerrado [a, b] en un intervalo cerrado [−1, 1].
162

Borra
dor Pre
limin
ar
4.2. PLANTEAMIENTO GENERAL PARA POLINOMIOS ORTOGONALES
N PN (xj) = 0 cj =2
(1− x2j ) (P ′N (xj))
2 2N − 1
2 ±√
3/3 1 3
3 0 8/9 5
±√
15/5 5/9
4 ±0,3399810436 0,65214515 7±0,8611363116 0,34785485
5 0 0,56888889 9±0,5384693101 0,47862867±0,9061798459 0,23692689
6 ±0,2386191861 0,46791393 11±0,6612093865 0,36076157±0,9324695142 0,17132449
......
......
Cuadro 4.7: Puntos y pesos para una cuadratura de Gauss-Legendre
pero como
a0 =1
2
∫ 1
−1
dx f(x) ⇒∫ 1
−1
dx f(x) =
N∑k=1
ckf(xk)− EN
Es decir, demostramos que es posible aproximar la integral del la funcion con un promedio pesado de lafuncion evaluada en unos puntos estrategicos. Los puntos estrategicos son los ceros del polinomio de Legendrede grado igual al numero de puntos con los cuales se quiere aproximar la funcion y los pesos vienen de resolverlas ecuaciones para los coeficientes de la expansion. En el cuadro 4.7 se ilustran los valores de los puntos deinterpolacion y sus pesos correspondientes.
Es inmediato comprobar que si f(x) es un polinomio de grado ≤ N − 1 la aproximacion es exacta y elerror es nulo. Pero lo que realmente hace util a este tipo de aproximaciones es que tambien sera exacta parapolinomios de grado ≤ 2N −1. Esto se puede ver si expresamos un polinomio de grado 2N −1 como la sumade dos polinomios
f(x) = PN (x)Y1(x) + Y2(x)
donde Y1 y Y2 son polinomios de grado N − 1. Entonces, al integrar miembro a miembro∫ 1
−1
dx f(x) =
∫ 1
−1
dx PN (x)Y1(x)︸ ︷︷ ︸=0
+
∫ 1
−1
dx Y2(x)
el primer termino se anula por ser PN(x) ortogonal a cualquier polinomio de grado inferior, y el segundotermino no es mas que el caso que analizamos anteriormente de un polinomio de grado ≤ N − 1.
Puede resultar conveniente escribir la ecuacion∫ b
a
f(x)dx =b− a
2
∫ 1
−1
f
((b− a)t+ b+ a
2
)dt
163

Borra
dor Pre
limin
ar
4.2. PLANTEAMIENTO GENERAL PARA POLINOMIOS ORTOGONALES
Entonces, para la cuadratura de Gauss-Legendre∫ b
a
f(x)dx =b− a
2
N∑k=1
ckf
((b− a)tk + b+ a
2
)donde los tk son las raıces de PN (t) = 0.
Ejemplo Utilizar la formula de cuadratura de dos puntos de Gauss-Legendre para calcular∫ 4
2
(x2 − 2x+ 1)dx
Entonces, N = 2:∫ 4
2
(x2 − 2x+ 1)dx =4− 2
2
[c1f
((4− 2)t1 + 4 + 2
2
)+ c2f
((4− 2)t2 + 4 + 2
2
)]= (1)f
(2t1 + 6
2
)+ (1)f
(2t2 + 6
2
)= f
(2√
3/3 + 6
2
)+ f
(−2√
3/3 + 6
2
)
=4√
3
3+
13
3− 4√
3
3+
13
3=
26
3.
Estrategia General para cuadraturas de Gauss
Para el caso general, la aproximacion de una integral∫ b
a
dx w(x)f(x) ≈N∑k=1
ckf(xk) ,
donde las {x1, · · ·xk, · · ·xN} son los ceros del polinomio ortogonal, de grado N , pN (x), elegido para haceresta aproximacion. Los N pesos {c1, · · · ck, · · · cN} surgen de resolver el sistema de ecuaciones
N∑j=1
cj =h0
p20
con h0 =
∫ b
a
w(x)p20(x)dx ∧
N∑j=1
cjpk(xj) = 0 para k = 1, 2, · · ·N − 1 .
Ası para aproximar integrales con funciones pesos, w(x), utilizaremos cuadraturas adaptadas a los polinomiosortogonales. Esto es∫ ∞
0
dx e−xf(x)⇒ Laguerre,
∫ ∞−∞
dx e−x2
f(x)⇒ Hermite,
∫ 1
−1
dxf(x)√1− x2
⇒ Tchebychev .
Ejercicio Para integrales con funciones peso del tipo
w(x) =1√
1− x2
los pesos son: wi = π/N , rsultando∫ 1
−1
dxf(x)√1− x2
' π
N
N∑k=1
f(xk) , con xk = cos
(k − 1
2
N
)π
164
Borra
dor Pre
limin
ar
4.2. PLANTEAMIENTO GENERAL PARA POLINOMIOS ORTOGONALES
Muestre que para un intervalo arbitrario a ≤ x ≤ b, esta ultima integral es:∫ b
a
dxf(x)√
(x− a)(b− x)' π
N
N∑k=1
f(xk)
donde:
xk =1
2(b+ a) +
1
2(b− a) cos
(k − 1
2
N
)π .
4.2.8. Ejemplos
4.2.9. Practicando con Maxima
4.2.10. Ejercicios
165

Borra
dor Pre
limin
arCapıtulo 5Ecuaciones diferenciales ordinarias
166

Borra
dor Pre
limin
ar
5.1. MOTIVACION, ORIGEN Y CONCEPTOS BASICOS
5.1. Motivacion, origen y conceptos basicos
En Ciencias, una de las formas de modelar fenomenos fısicos es mediante su caracterizacion a traves deuna funcion matematica, digamos G = G (x, y, z; t). Una las formas (la ideal) para modelar los cambios deesta funcion, G (x, y, z; t), que depende de la posicion y del tiempo, es a traves de una ecuacion en la cualestan involucradas la funcion, G (x, y, z; t) y sus derivadas. A esa ecuacion, que involucra las derivadas, lallamaremos Ecuacion Diferencial.
Existe toda una “fauna” de ecuaciones diferenciales y hoy disponemos de un importante arsenal detecnicas, metodos y herramientas para encontrar la funcion G (x, y, z; t), la cual sera nuestra funcion incognita.
Este curso trata, parcialmente, de mostrar parte de esta “fauna” y de indicarles metodos para resolverun tipo particular de ecuaciones diferenciales: las Ecuaciones Diferenciales Ordinarias.
Las ecuaciones diferenciales ordinarias son basicamente funciones del tipo
F[x, y(x), y′(x), y′′(x), y′′′(x), · · · , y(n)(x)
]= 0 , (5.1)
donde:
y′(x) =dy(x)
dx, y′′(x) =
d2y(x)
dx2, y′′′(x) =
d3y(x)
dx3, · · · , y(n)(x) =
d(n)y
dx(n).
Son ejemplos de ecuaciones diferenciales ordinarias:
ax+ yy′ = 0 , x2y′′′ − (y′)2 = ex , y′′ cos(x) + cos(y) = 2 .
Cuando la funcion incognita f viene definida por una relacion entre sus derivadas parciales con respectoa las variables independientes nos estamos enfrentando a un problema de Ecuaciones Diferenciales en De-rivadas Parciales Si la funcion es f = f(x, y, z) una ecuacion diferencial en derivadas parciales es una de laforma:
F[x, y, z, f, ∂xf, ∂yf, ∂zf, ∂
2xf, ∂
2yf, ∂
2zf, ∂xyf, ∂xzf, . . .
]= 0 , (5.2)
donde:
∂xf =∂f
∂x, ∂yf =
∂f
∂y, ∂zf =
∂f
∂y, ∂2
xf =∂2f
∂x2, ∂2
yf =∂2f
∂y2, ∂2
zf =∂2f
∂y2, ∂xyf =
∂2f
∂x∂y, ∂xzf =
∂2f
∂x∂z
Ejemplos de ecuaciones diferenciales en derivadas parciales:
∂2f
∂x2+∂2f
∂y2= f(x, y) ,
∂f
∂x+∂f
∂yf = 0 ,
∂2f(x, y)
∂x∂y+∂f(x, y)
∂x− f(x, y) = p(y) .
Como ya mencionamos, en estas notas de metodos matematicos trataremos las ecuaciones diferencialesordinarias y sus metodos de resolucion. Un estudio de la ecuaciones en derivadas parciales sera tratado enun curso posterior.
Empecemos por recordar que desde los primeros cursos hemos tratado, la mayor de las veces sin saberloo sin explicitarlo, con este tipo de ecuaciones en donde la incognita no es un numero sino un conjunto denumeros: una funcion.
5.1.1. Un ejemplo emblematico
El caso mas emblematico lo constituye el conjunto de “formulas” que aprendimos cuando estudiaba-mos bachillerato o, mas recientemente, en los primeros cursos de fısica general en la universidad. Entoncesdescribıamos el movimiento de partıculas en una dimension, a traves de dos ecuaciones:
vf (t) = v0 + at y d(t) = v0t+ at2
2. (5.3)
167

Borra
dor Pre
limin
ar
5.1. MOTIVACION, ORIGEN Y CONCEPTOS BASICOS
De memoria repetıamos que vf representaba la velocidad final, v0 la velocidad inicial, a la aceleracion,t el tiempo transcurrido y d la distancia recorrida en ese tiempo. El problema consistıa en encontrar, paraun sinfın de situaciones fısicas, primeramente el valor de la aceleracion del movil y a partir de las leyesde Newton, conociendo la velocidad y la posicion inicial, encontrabamos la posicion d y la velocidad vf entodo instante de tiempo. Ası, mediante diagramas de cuerpo libre y la utilizacion de las leyes de Newton,encontrabamos el valor de la aceleracion y con las “formulitas” (5.3) resolvıamos el problema.
∑Fext = ma ⇒ a =
∑Fextm
⇒
vf = v0 + at
d = v0t+ at2
2
(5.4)
Lo mas probable es que nuestros profesores nos repitieran hasta el cansancio que la sumatoria de fuerzasexternas
∑Fext era constante, y lo mas seguro que nosotros en aquellos momentos no comprendieramos la
trascendencia de esa suposicion.El caso mas representativo era el del movimiento de un cuerpo bajo la accion de un campo gravitatorio:
el problema llamado de caıda libre.
−mg = ma ⇒ a = −g ⇒
vf = v0 − gt
d = v0t− gt2
2
(5.5)
Lo que esta detras de esta historia que nos inicio en el estudio de la fısica y a muchos de nosotrosnos sedujo para seguir estudiando y aprendiendo a tratar de describir la naturaleza, es, efectivamente, lautilizacion de las leyes de Newton para modelar el fenomeno del movimiento. De este modo:∑
Fext = ma = mdv(t)
dt= m
d2x(t)
dt2. (5.6)
Sı la sumatoria de fuerzas externas es una contante tendremos que:
dv(t)
dt= a =
∑Fextm
= constante ⇒
v(t) =
∫dt a = at+ C2
x(t) =∫
dt (at+ C2) = a t2
2 + C2t+ C1
(5.7)
Claramente al identificar:
C2 = v(t = 0) = v0 y C1 = x(t = 0) = x0 = 0 , (5.8)
reobtenemos nuestras “formulitas” ancestrales. Es importante senalar que:
dv(t)
dt= a y
dx(t)
dt= at+ C2 , (5.9)
constituyen ecuaciones diferenciales donde las funciones incognitas son la velocidad v(t) y la posicion, x(t),respectivamente. Ambas funciones se encontraban dentro de un signo de derivada y fueron “despejadas”mediante un proceso de integracion.
La descripcion del movimiento de un sistema de partıculas es mas rica y compleja. El movimiento de unagran cantidad de partıculas puede ser simulado a traves de una ecuacion diferencial del tipo:∑
Fext
(r (t) ,
dr(t)
dt, t
)= ma = m
dv(t)
dt= m
d2r(t)
dt2. (5.10)
168

Borra
dor Pre
limin
ar
5.1. MOTIVACION, ORIGEN Y CONCEPTOS BASICOS
El caracter vectorial implica tres ecuaciones diferenciales, una por cada dimension del movimiento:
∑Fext
(r (t) ,
dr(t)
dt, t
)= ma⇒
∑F xext
(x (t) ,
dx(t)
dt, t
)= max = m
d2x(t)
dt2= m
dvx(t)
dt
∑F yext
(y (t) ,
dy(t)
dt, t
)= may = m
d2y(t)
dt2= m
dvy(t)
dt
∑F zext
(z (t) ,
dz(t)
dt, t
)= maz = m
d2z(t)
dt2= m
dvz(t)
dt
Ademas del caracter vectorial de la ecuacion, las componentes de la fuerza pueden dejar de ser constantesy depender no solo del tiempo, sino del vector posicion, del vector velocidad o de ambas simultaneamente.
En este caso nuestras “formulitas” dejan de ser validas y debemos integrar las ecuaciones diferencialespara obtener la trayectoria de la partıcula, es decir, r (t), conocidas: la masa, la expresion de la sumatoria defuerzas externas, la posicion y la velocidad inicial. Este problema se conoce como el problema de condicionesiniciales y es, como hemos dicho antes, la razon de este curso.
Pero antes vamos a mostrar como el conocimiento del movimiento bajo la accion de una fuerza constante,es decir, el movimiento de una partıcula con aceleracion constante puede resultar muy util para resolver, deforma aproximada, el caso mas general que hemos mencionado.
Veamos con detenimiento que significan estas afirmaciones.Es claro que el tiempo de evolucion esta comprendido entre el tiempo inicial, t0, y el tiempo final, tf , es
decir: t0 ≤ t ≤ tf . Supongamos que dividimos ese intervalo de tiempo en N subintervalos
[t0, tf ] = [t0, t1] ∪ [t1, t2] ∪ [t2, t3] ∪ · · · ∪ [ti, ti+1] ∪ · · · ∪ [tN−2, tN−1] ∪ [tN−1, tN = tf ]
de tal modo que en cada uno de esos N subintervalos la aceleracion es constante. En estas situacion, nuestras“formulitas” son validas. Esto es:
[t0, t1] :v(t0) = v0
x (t0) = x0
⇒v(t1) = v1 = v0 + a (x0, v0, t0) [t1 − t0]
x (t1) = x1 = v0 [t1 − t0] + a (x0, v0, t0)[t1 − t0]
2
2
(5.11)
[t1, t2] :v(t1) = v1
x (t1) = x1
⇒v2 = v1 + a (x1, v1, t1) [t2 − t1]
x2 = x1 + v1 [t2 − t1] + a (x1, v1, t1)[t2 − t1]
2
2
Si continuamos con este procedimiento, para un tiempo n-esimo se tiene:
[ti, ti+1] :v(ti) = vi
x (ti) = xi
⇒vi+1 = vi + a (xi, vi, ti) [ti+1 − ti]
xi+1 = xi + vi [ti+1 − ti] + a (xi, vi, ti)[ti+1 − ti]2
2
hasta i = N − 1:
[tN−1, tN ] :v(tN−1) = vN−1
x (tN−1) = xN−1
⇒vN = vN−1 + a (xN−1, vN−1, tN−1) [tN − tN−1]
xN = xN−1 + vN−1 [tN − tN−1] + a (xN−1, vN−1, tN−1)[tN − tN−1]
2
2
169

Borra
dor Pre
limin
ar
5.1. MOTIVACION, ORIGEN Y CONCEPTOS BASICOS
Notese que las posiciones y velocidades finalespara cada intervalo, son las posiciones y veloci-dades iniciales para el intervalo siguiente y queel valor de la aceleracion, que es variable, se to-ma como constante e igual al valor que tiene enel comienzo del intervalo.Para analizar este caso consideremos la situacionde una esfera de corcho, con radio a y masa mque se suelta desde el fondo de un tanque de aguade profundidad h.Queremos conocer con que velocidad llega la es-fera a la superficie.El diagrama de cuerpo libre se puede observar enla Figura 5.1 y la ecuacion de Newton para estecaso se expresa como:
Figura 5.1: Diagrama de Cuerpo Libre de una esfera de cor-
cho que emerge desde el fondo de un tanque de agua.
∑Fext
(r (t) ,
dr(t)
dt, t
)⇒ −mg − ηv (t) +mlg = m
dv(t)
dt. (5.12)
En la cual podemos identificar:
Peso: −mg , Friccion: − ηv (t) , Empuje: mlg .
Como sabemos de cursos anteriores, el empuje o fuerza de Arquımides es igual al peso del fluido desalojadopor el cuerpo. Por ello aparece ml que representa la masa del fluido.
Para el caso en el cual el fluido no es viscoso (η = 0), es decir, no hay friccion con el fluido, la ecuacionse reduce a: ∑
Fext
(r (t) ,
dr(t)
dt, t
)⇒ −mg +mlg = ma , (5.13)
en la cual claramente la aceleracion es constante e igual a:
a = g(ml
m− 1)≡ g
(ρlρ− 1
)= cte . (5.14)
donde hemos identificado ρl la densidad del fluido y ρ la densidad del cuerpo.Para buscar la velocidad con la cual llega a la superficie, encontramos primero el tiempo que tarda en
subir y luego evaluamos la velocidad en ese tiempo. Esto es:
y(tf ) = h = g
(ρlρ− 1
)t2f2⇒ tf = ±
√2hρ
g (ρl − ρ), (5.15)
por lo tanto, la velocidad final es:
vf = ±g(ρlρ− 1
)√2hρ
g (ρl − ρ). (5.16)
En el caso general, descrito por la ecuacion (5.12), procedemos del mismo modo: encontramos el tiempoen el cual llega la superficie y luego evaluamos la expresion de la velocidad para ese tiempo. Fıjense que
170

Borra
dor Pre
limin
ar
5.1. MOTIVACION, ORIGEN Y CONCEPTOS BASICOS
la estrategia para resolver el problema fısico es la misma, solo que tendremos que disponer de un arsenaladicional de herramientas y tecnicas para “despejar” la funcion velocidad.
Aprenderemos a resolver ecuaciones diferenciales de la misma manera que antes resolvıamos ecuacionesalgebraicas. En este caso, y como veremos mas adelante, la solucion exacta para la expresion de la velocidades:
mdv(t)
dt= −mg − ηv (t) +mlg ⇒ v (t) =
g (m−ml)
η
[e−
ηm t − 1
]. (5.17)
Con lo cual:dy(t)
dt= v (t) =
g (m−ml)
η
[e−
ηm t − 1
], (5.18)
y la funcion posicion surge de integrar la ecuacion diferencial anterior
y (t) = −g(m−ml)
η2
[me−
ηm t + ηt−m
], (5.19)
desafortunadamente, no se puede despejar el tiempo de manera exacta por cuanto la ecuacion:
y(tf ) = h = −gm (m−ml)
η2
[e−
ηm tf − 1 +
η
mtf
], (5.20)
para el tiempo final tf , esta es una ecuacion trascendente y debe ser resuelta numericamente.Hagamos ahora algunas sustituciones simplificadoras:
ml =4π
3ξ ρ a3 , m =
4π
3φ ρ a3 , ρl = ξρ , ρ = φρa , (5.21)
donde ξ y φ representan las densidades relativas del fluido y del cuerpo respecto al agua (que es de densidadρa), respectivamente. Sustituyendo por valores numericos:
g = 9,8 ; a = 0,02 ; ρa = 103 ; ξ = 1 ; φ = 0,8 ; v0 = 0 ; η = (6πa)(1,002× 10−3
), (5.22)
entonces, de la ecuacion (5.20) nos queda que para h = 10(mts)
10 = 12339,72755[1− e(−0,01409062500tf )
]− 173,8744736tf , (5.23)
y se obtiene, de manera numerica, que tf = 2,876443096 s.Con este resultado se evalua la ecuacion para la velocidad:
v (tf ) = 173,8744730[1− e(−0,01409062500 tf )
]⇒ vf = 6,9063798 m/s . (5.24)
En la siguiente tabla se implementan las ecuaciones (5.11) habida cuenta de las simplificaciones (5.21) ylos valores numericos (5.22) para h = 1/10 ∼ [ti+1 − ti]
171

Borra
dor Pre
limin
ar
5.1. MOTIVACION, ORIGEN Y CONCEPTOS BASICOS
ti(s) vi(m/s) yi(m) v(t)(m/s) y(t)(m)0.100 0.2449999997 0.01224999998 0.2448275 0.012250.200 0.4896547791 0.04898273892 0.4893102 0.048950.300 0.7339648246 0.11016371910 0.7334487 0.110090.400 0.9779306220 0.19575849150 0.9772434 0.195630.500 1.221552656 0.30573265540 1.2206949 0.305530.600 1.464831412 0.44005185880 1.4638035 0.439760.700 1.707767373 0.59868179800 1.7065698 0.598280.800 1.950361022 0.7815882177 1.9489943 0.781060.900 2.192612841 0.9887369109 2.1910775 0.988071.000 2.434523312 1.220093719 2.4328198 1.219261.100 2.676092916 1.475624530 2.6742217 1.474621.200 2.917322134 1.755295283 2.9152836 1.754101.300 3.158211444 2.059071962 3.1560062 2.057671.400 3.398761326 2.386920600 3.3963898 2.38529
aquı, vi y yi representan la velocidad y la posicion aproximada, tal y como se expresan en las ecuaciones(5.11). Mientras que v (t) y y (t) ilustran los valores de la velocidad y la posicion exactas, calculadas a partirde las ecuaciones (5.18) y (5.19). Es claro que la aproximacion es buena hasta la segunda cifra decimal.
5.1.2. Ejemplos de algunas ecuaciones diferenciales
Thomas Robert Malthus1 fue uno de los primeros en darse cuenta que la poblacion crece como unarazon geometrica mientras que los medios de subsistencias crecen de manera aritmetica. Esta afirmacionplasmada en su Ensayo sobre el Principio de Poblaciones, el cual inspiro a Darwin en la formulacionde principio de seleccion natural. Malthus, muy religioso y creyente pensaba que esa diferencia en elcrecimiento de la poblacion y las necesidades que ellas generaban, eran de procedencia divina y queforzarıa a la humanidad a ser mas laboriosa e ingeniosa para lograr los medios de subsistencia. Darwin,no tan religioso, lo formulo como una situacion natural presente en todas las especies. La Ley deMalthus o Decaimiento Radioactivo es:
dy(t)
dt= k y(t) ⇒ y(t) = y0e
k t , con y0 = y(0) . (5.25)
Para k > 0 la poblacion crece y para k < 0 tenemos una situacion de decaimiento: la poblacion decrececon el tiempo. Este concepto se utiliza los procesos de decaimiento radiactivo.
La ecuacion logıstica o Ley de Verhulst2 se utiliza para describir el crecimiento de la poblacion deuna manera mas precisa que la Ley de Malthus. Esta ecuacion toma en cuenta el decrecimiento de lapoblacion con el termino −y2
dy(t)
dt= [k − ay(t)] y(t) = ky(t)− ay2(t) ⇒ y(t) =
k y0
a y0 + (k − a y0) e−k t
La Ley de Enfriamiento de Newton expresa que la tasa de cambio de la temperatura respecto al tiempoes proporcional a la diferencia de temperatura entre el cuerpo y el medio ambiente.
dT (t)
dt= k(T − Tm) ⇒ T (t) = (T0 − Tm) ek t + Tm , con T0 = T (0)
1En honor al economista polıtico ingles Thomas Robert Malthus (1766-1834).2Pierre Francois Verhulst 1804 - 1849. Matematico belga con sus mas importantes comtribuciones en estadıstica de-
mografica.
172

Borra
dor Pre
limin
ar
5.1. MOTIVACION, ORIGEN Y CONCEPTOS BASICOS
La Ley de Torricelli, la cual establece (para un tanque cilındrico) la tasa de cambio respecto al tiempode la profundidad del agua en un tanque:
dy(t)
dt=k
A
√y(t) ⇒ y(t) =
1
2t+ y(0)2 .
5.1.3. De ecuaciones y ecuaciones diferenciales
En cursos anteriores consideramos una ecuacion algebraica como aquella que se cumplıa para ciertosvalores de x:
x2 − 4x+ 4 = 0 ⇒ x = 2 ,
llamaremos ahora una ecuacion diferencial aquella que se cumple para ciertas funciones i.e.
df(x)
dx− f(x) = 0 ⇒ f(x) = ex
Definicion:Sea f(x) una funcion definida sobre un intervalo a < x < b. Por una Ecuacion DiferencialOrdinaria entenderemos toda ecuacion que involucre a x, f(x) y una o mas derivadas de f(x).
Ejemplos:
df(x)
dx+ f(x) = 0 ,
d3f(x)
dx3= −e−x , d2f(x)
dx2=
cos(x)
1− x2, x
df(x)
dx= 2[f(x)]2 .
Utilizaremos para tal efecto varias notaciones equivalentes:
d2f(x)
dx2+ g(x)
df(x)
dx− af2(x) = k(x)
f ′′(x) + g(x)f ′(x)− af2(x) = k(x)
fxx(x) + g(x)fx(x)− af2(x) = k(x) .
Se llaman ordinarias porque involucran funciones de una sola variable y derivadas respecto a ella.
5.1.4. Orden y linealidad
Una ecuacion diferencial ordinaria, de orden n, generica suele denotarse de la siguiente manera:
F [x, y(x), y′(x), y′′(x), y′′(x), · · · , y(n)(x)] = 0 , (5.26)
y sera lineal si solo parecen funciones lineales de y(x) y sus derivadas. Por ejemplo:
y′y′′ + yy′ − ay2 = k(x) es no lineal
α(x)y′′ + β(x)y′ + γ(x)y = k(x) es lineal
Muchas veces se acostumbra a omitir la dependencia de la funcion de la variable porque esta queda sobre-entendida: y(x) = y.
El orden de la derivada mayor define el orden de la ecuacion diferencial, para la EDO (5.26) se tieneentonces que esta sera de orden n. Ejemplos:
y′′ + (3y′)3
+ 2x = 7 , EDO no lineal de orden 2
y′ + y = x , EDO lineal de orden 1 .
173

Borra
dor Pre
limin
ar
5.2. SOBRE LAS SOLUCIONES
Figura 5.2: Grafica de la funcion implıcita f(x, y) = x3 + y3(x)− 3xy(x) = 0
La ecuacion diferencial (5.26) sera homogenea si NO contiene terminos independientes de y(x), en casocontrario sera inhomogenea:
d2y(x)
dx2+ g(x)
dy(x)
dx− ay(x) = k(x) lineal inhomogenea
y′′(x) + g(x)y′(x)− ay(x) = 0 lineal homogenea.
5.1.5. Ejemplos
5.1.6. Practicando con Maxima
5.1.7. Ejercicios
5.2. Sobre las soluciones
5.2.1. Soluciones explıcitas e implıcitas
Las soluciones heredan su nombre del tipo de funcion que las representa, ası tendremos soluciones explıci-tas cuando las funciones sean soluciones y sean explıcitas. Esto es
d2y(t)
dt2= y(t) + 4 et ⇒ y(t) = etC2 + e−tC1 + 2 tet
y tambien
y′ = (x+ y)2 ⇒ y(t) = tan(t− C1)− t , con t− C1 6=π
2
174

Borra
dor Pre
limin
ar
5.2. SOBRE LAS SOLUCIONES
Las soluciones seran implıcitas si son representadas por funciones como
y y′ + x = 0 ⇒ f(x, y) = x2 + y(x)2 − 25 = 0⇒{y =
√25− x2
y = −√
25− x2con − 5 < x < 5
En este caso, se tiene que seleccionar una rama de la funcion raız.Igualmente, sera solucion implıcita de la ecuacion:
[y2(x)− x] y′(x)− y(x) + x2 = 0
la siguiente funcionf(x, y) = x3 + y3(x)− 3xy(x) = 0,
ahora no es tan facil verificar si efectivamente es una solucion. Para comprobarla derivamos la funcion
d[f(x, y)]
dx=
d[x3 + y3(x)− 3xy(x)
]dx
= 0⇒ 3x2 + 3y2(x)dy(x)
dx− 3y(x)− 3x
dy(x)
dx= 0 ,
simplificando y agrupando obtenemos la ecuacion diferencial. Otra vez, la funcion solucion no es univaluada.Al graficarla (ver Figura 5.2) nos damos cuenta que tenemos varias soluciones de funciones univaluadas unas
contınuas y otras no. La funcion es univaluada fuera del lobulo. Esto es para x ≤ 0 ∧ x > 223 . Con lo cual
tendremos que seleccionar, dentro del lobulo, cual de las partes univaluadas corresponde a la solucion.
5.2.2. Soluciones generales y particulares
Veamos las siguientes ecuaciones y soluciones
y′ = ex ← y(x) = ex + C1
y′′ = ex ← y(x) = ex + C2x+ C1
y′′′ = ex ← y(x) = ex + C3x2 + C2x+ C1
Cada una de las soluciones representan familias de soluciones, una para cada constante. Este tipo de solucio-nes las denominaremos soluciones generales. Es decir, llamaremos solucion general de una ecuacion diferencialaquella que queda indeterminada por un conjunto de constantes {C1, C2, C3, . . . , Cn}. En contraste, cuandoparticularizamos los valores de las constantes tendremos una solucion particular par cada una de las ecua-ciones. Adicionalmente, cuando nos referimos a las ecuaciones no lineales el concepto de solucion particularvarıa. Soluciones particulares en este tipo de ecuaciones seran aquellas que se cumplen para rangos (o puntos)muy particulares. Vale decir
(y′)2 + y2 = 0(y′′)2 + y2 = 0
}⇒ y = 0 unica solucion
Tamibien en este caso llamaremos a este tipo de soluciones, particulares. De igual modo puede darse casospara los cuales no exista solucion en un determinado intervalo.
|y′|2 + 1 = 0|y′′|2 + 1 = 0
}⇒ no tienen solucion
Ecuaciones de la forma
xy′ = 1 ⇒ y(x) = ln |x|+ C ⇒
y(x) = ln(x) + C1 para x > 0
y(x) = ln(−x) + C1 para x < 0
175

Borra
dor Pre
limin
ar
5.2. SOBRE LAS SOLUCIONES
con: −1 < x < 0 ∧ 0 < x < 1, tienen soluciones particulares para intervalos de la variables x.Del mismo modo
(y′ − y)(y′ − 2y) = 0 ⇒ [y(x)− C1ex][y(x)− C2e
2x]
= 0
tendra dos soluciones particulares.
5.2.3. Familia de soluciones n−parametricas
Si y(x) = f(x,C1, C2, . . . , Cn) es solucion de una ecuacion diferencial
F [x, y(x), y′(x), y′′(x), · · · , y(n)(x)] = 0 ,
para n constantes {C1, C2, C3, . . . , Cn} arbitrarias, entonces diremos que
y(x) = f(x,C1, C2, . . . , Cn) es una familia n-parametrica de soluciones.
Existe una diferencia entre una solucion general de una ecuacion y una solucion n−parametrica. La soluciongeneral tiene que contener todas las soluciones de una ecuacion diferencial determinada. Una solucionn−parametrica no necesariamente. Veamos
y = xy′ + (y′)2 ⇒
y(x) = Cx+ C2
y(x) = −x2
4
Se estarıa tentado en llamar solucion general a la solucion 1−parametrica y = Cx+C2. Sin embargo, se dejapor fuera a la otra solucion que no tiene que ver con un valor particular de la constante C.
Otro ejemplo, lo constituye
y′ = −2y32 ⇒ y(x) =
C2
(Cx+ 1)2 , ∀x ,
pero tambien
y(x) =(x+ C
)−2
, es solucion con y(x) 6= 0 .
Una solucion n−parametrica se denominara solucion general si contiene todas las soluciones de una de-terminada ecuacion diferencial. En el caso de ecuaciones diferenciales lineales, las soluciones n−parametricasconstituyen las soluciones generales a las ecuaciones diferenciales.
5.2.4. Solucion particular, valores iniciales y valores de contorno
Dependiendo de la situacion fısica que estemos modelando quiza podamos determinar las constantesarbitrarias de una familia n−parametrica con informacion para un unico punto x = x0. Esto es:
F [x, y(x), y′(x), y′′(x), · · · , y(n)(x)] = 0 ⇒ y(x) = f(x,C1, C2, . . . Cn)
dondey(x0) = C1 y′(x0) = C2 . . . y(n−1)(x0) = Cn .
176

Borra
dor Pre
limin
ar
5.2. SOBRE LAS SOLUCIONES
En este caso diremos que tendremos un problema de valores iniciales, ya que determinamos las constantesarbitrarias a partir de la informacion de la funcion y sus derivadas en un solo punto, por ejemplo:
y′′ + ω2y = 0 con
{y(0) = 0y′(0) = 1
}⇒ y(x) =
1
ωsen(ωx) .
Si por el contrario, para determinar el valor de las constantes arbitrarias disponemos de informacion de lafuncion y sus derivadas en dos o mas puntos, diremos que tendremos un problema de contorno. Esto es:
y′′ + ω2y = 0 con
{y(0) = 0y(1) = 0
}⇒ y(x) = sen(nπωx) .
Notese que tambien pudimos haber tenido informacion del tipo
y(0) = y0 , y′(1) = y1 ; y′(0) = y0 , y
′(1) = y1 ; y′(0) = y0 , y(1) = y1 ,
y para cada uno de estos caso tendremos una solucion distinta.Demostraremos que los problemas de valores iniciales para ecuaciones diferenciales lineales siempre tienen
solucion particular (siempre se pueden determinar las constantes a partir de la informacion de la funcion ylas derivadas en UN punto). No ası los problemas de valores de contorno.
5.2.5. Ejemplos
5.2.6. Practicando con Maxima
5.2.7. Ejercicios
177
Borra
dor Pre
limin
arCapıtulo 6Ecuaciones diferenciales de orden 1
178

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
6.1. Soluciones analıticas
Es fundamental, primero que todo, identificar con que tipo de ecuacion diferencial ordinaria que estamostratando antes de cualquier intento de conseguir una solucion. Veamos varios ejemplos:
d2θ
dt2+g
lsen(θ) = 0 , EDO no lineal, homogenea de orden 2
d2θ
dt2+g
lθ = 0 , EDO lineal, homogenea de orden 2
d2θ
dt2+g
lθ = E(t) , EDO lineal, no homogenea de orden 2
y′ + xy =x
y3, EDO no lineal, homogenea de orden 1
y′ − x3 + 2 yx −1xy
2 = 0 , EDO no lineal, no homogenea de orden 1
tan(x)y′ − y = tan2(x) , EDO lineal, homogenea de orden 1
xy′ + y = x3 , EDO lineal, no homogenea de orden 1
Ahora de manera un poco mas sistematica diremos que una ecuacion diferencial de primer orden sera unfuncional tal que si es explıcita respecto a la derivada esta se podra despejar
F [x, y(x), y′(x)] = 0 ⇒
y′ ≡ dy(x)
dx= H(x, y)
P (x, y)dx+Q(x, y)dy = 0
Ejemplos:
y′ = 2xy + ex ⇒ (2xy − ex) dx− dy = 0 ,
y′ = ln(x) + y ⇒ (ln(x) + y) dx− dy = 0
6.1.1. Metodos elementales de integracion
Para comenzar expondremos unos metodos de integracion, los cuales si bien son elementales y casi trivialesseran utilizados en lo que sigue con bastante frecuencia.
Integracion directa
La integracion directa tiene varias variantes las cuales nos hemos tropezado en varias situaciones demodelaje y que nos han permitido integrar (intuitivamente) ecuaciones diferenciales. La mas directa detodas tiene que ver con la siguiente ecuacion diferencial
dy(x)
dx= f(x)
179

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
por lo cual, al integrar (analıtica o numericamente) tendremos la expresion para la funcion y(x),∫dy(x) =
∫dx f(x) ⇒ y(x) =
∫dx f(x) + C
La integracion directa fue la estrategia que utilizamos anteriormente para encontrar las formulitas quenos aprendimos en bachillerato. Esto es
∑Fextm
=dv(t)
dt= a = constante ⇒
v(t) =
∫dt a = at+ C1
x(t) =∫
dt (at+ C1) = at2
2+ C1t+ C2
en la cual al recordar las condiciones iniciales se tiene:
v(0) = v0 ≡ C1 ⇒ v(t) = v0 + at
x(0) = x0 ≡ C2 ⇒ x(t) = x0 + v0t+ at2
2.
Una primera variante de la estrategia de integracion directa anterior se aplica a la siguiente ecuacion
dy(x)
dx= f(y)
acomodando los terminos e integrando resulta:∫dy
f(y)=
∫dx ⇒ F [y(x)] = x+ C
donde F [y(x)] sera un funcional, desde el cual quiza se pueda despejar y(x).Esta estrategia se ilustra en el siguiente ejemplo:
dy(x)
dx= −ay (x) , con y(0) = 2 ,
entonces: ∫dy
y= −a
∫dx ⇒ y(x) = Ce−ax ⇒ yp(x) = 2e−ax .
la Figura 6.1 muestra varias soluciones particulares pertenecientes a esta familia, para a = 13 .
Otro ejemplo de integracion directa se puede ver en la busqueda de la solucion de la siguiente ecuaciondiferencial no lineal:
yy′ = (y + 1)2
esto es:yy′
(y + 1)2= 1 ⇒
∫ydy
(y + 1)2=
∫dx , para y 6= −1 ,
integrando1
y + 1+ ln |y + 1| = x+ C ,
que no es otra cosa que una familia de soluciones implıcitas, 1−parametrica. Para una condicion inicial comoy(2) = 0 entonces
y(2) = 0⇒ C = −1 ⇒ 1
y + 1+ ln |y + 1| = x− 1 para y 6= −1 ,
una vez mas esta familia de soluciones 1−parametrica no constituye la solucion general de la ecuaciondiferencial ya que no contiene todas las soluciones. En este caso, y(x) = −1 tambien es solucion.
180

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
Figura 6.1: Familia de soluciones 1−parametrica para a = 13 . En particular han sido tomados los valores
C = −3,−2,−1, 0, 1, 2, 3
6.1.2. Ecuaciones diferenciales separables
Los casos anteriores de integracion directa son generalizados por una ecuacion que llamaremos separable.Esto es, la funcion (funcional) de dos variables del lado derecho se supone que es el resultado del productode dos funciones de una variable, con lo cual las variables dependientes e independientes se agrupan a ladosdistintos de la igualdad. La siguiente ecuacion es separable
dy(x)
dx= F [y(x)]G(x)
y por lo tantody(x)
F (y)= G(x) dx ⇔
∫dy
F (y)=
∫G(x) dx .
Por ejemplo, al querer resolver la siguiente ecuacion
dy(x)
dx= x+ xy
se tiene ∫dy
1 + y=
∫x dx ⇒ ln(1 + y) =
x2
2+ C ⇒ y(x) = Ae
x2
2 − 1 ,
donde C o A son constantes arbitrarias a ser determinadas por las condiciones iniciales y ademas con y 6= −1.De todos modos y = −1 es una solucion particular.
181

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
6.1.3. Variaciones sobre separabilidad
Existen otras situaciones en las cuales encontremos ecuaciones diferenciales que podremos convertir enseparables a traves de un cambio de variable:
dy
dx= f(ax+ by + c︸ ︷︷ ︸
z
) ⇒ dz = adx+ bdy ,
por lo tanto:dy
dx=
1
b
dz
dx− a
b⇒ 1
b
dz
dx− a
b= f(z) ⇒ dz
dx= bf(z) + a
es decir, el cambio de variable nos conduce a una ecuacion diferencial separable:
dz
bf(z) + a= dx .
Un ejemplo nos clarifica de que se trata
y′ = sen2(x− y) ⇒ dz = dx− dy ,
esto es
y′ = 1− dz
dx⇒ z′ = 1− sen2(z) ⇒
∫dz
1− sen2(z)=
∫dx
es decir ∫dz
cos2(z)= x+ C ⇒ tan(z) = x+ C ⇒ tan(x− y) = x+ C ⇒ y = x− arctan(x+ C) .
Se puede tratar de generalizar el caso anterior y considerar ecuaciones diferenciales del tipo
dy
dx= f
(a1x+ b1y + c1a2x+ b2y + c2
)Entonces, se distinguen dos casos dependiendo de si las rectas a1x+ b1y + c1 = 0 y a2x+ b2y + c2 = 0 sonparalelas o no.
1. Son paralelas:a2
a1=b2b1
= λ ⇒ dy
dx= f
(a1x+ b1y + c1
λ(a1x+ b1y) + c2
)≡ f(a1x+ b1y)
la cual analizamos anteriormente.
2. No son paralelas, entonces se intuye el siguiente cambio de variables
u = a1x+ b1y + c1 ⇒ du = a1dx+ b1dy dx =b2du− b1dv
a1b2 − a2b1⇒
v = a2x+ b2y + c2 ⇒ dv = a2dx+ b2dy dy =a1dv − a2du
a1b2 − a2b1
con lo cual, la ecuacion diferencial
dy
dx= f
(a1x+ b1y + c1a2x+ b2y + c2
)= f
(uv
),
182

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
queda de la forma [a2 + b2f
(uv
)]du−
[a1 + b1f
(uv
)]dv = 0 ,
donde la funcion f(uv
)se conoce como una funcion homogenea al igual que la ecuacion diferencial
que hereda de esta su nombre. Este tipo de ecuaciones diferenciales seran consideradas en la proximaseccion.
Otro enfoque (equivalente) de este mismo problema puede ser consultado en el problemario de Kiseliov,Kransnov, Makarenko1. En este enfoque el cambio de variables se relaciona con el punto de corte (x0, y0)
Para ejemplificar este caso analizaremos un ejemplo sencillo de una funcion con argumento inhomogeneodel tipo.
dy(x)
dx=a1x+ b1y + c1a2x+ b2y + c2
⇔ Q(x, y)dy + P (x, y)dx = 0 ⇒
Q(x, y) ∝ a2x+ b2y + c2
P (x, y) ∝ a1x+ b1y + c1
Decimos, entonces que los coeficientes Q(x, y) y P (x, y) son inhomogeneos (ci 6= 0). Supondremos que lasrectas no son paralelas, por lo cual utilizamos el cambio de variable propuesto anteriormente. Entonces
u = a2x+ b2y + c2 ⇒ du = a2dx+ b2dy ⇒ dy =1
b2 − b1
(du
a2− dv
a1
)
v = a1x+ b1y + c1 ⇒ dv = a1dx+ b1dy ⇒ dx =1
a2 − a1
(du
b2− dv
b1
)con lo cual convertimos los coeficientes Q(x, y) y P (x, y) en homogeneos. Esto es
(a2x+ b2y + c2)dy + (a1x+ b1y + c1)dx = 0︸ ︷︷ ︸⇓︷ ︸︸ ︷(
u
a2(b2 − b1)+
v
b2(a2 − a1)
)du−
(u
a1(b2 − b1)+
v
b1(a2 − a1)
)dv = 0
es decir
P (u, v) = u
(1
a2(b2 − b1)+
vu
b2(a2 − a1)
)= ug1
( vu
),
y
Q(u, v) = u
(1
a1(b2 − b1)+
vu
b1(a2 − a1)
)= ug2
( vu
).
Este tipo de funciones homogeneas seran consideradas mas adelante.
6.1.4. Ecuaciones diferenciales no separables
Veamos ahora un caso bastante sencillo de resolver donde la EDO no es una ecuacion diferencial separable.Consideremos, a manera de prueba, la ecuacion diferencial siguiente
dy(x)
dx+ ay(x) = e−x , con y(0) = 2 ,
1A. Kiseliov, M. Krasnov y G. Makarenko (1969) Problemas de Ecuaciones Diferenciales Ordinarias. (Mir, Moscu)
183

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
entonces, podemos preguntarnos sobre la posibilidad de que exista una funcion µ(x) de manera que simultiplicamos ambos lados de la ecuacion diferencial por µ(x) entonces, el lado izquierdo de la ecuaciondiferencial se pueda escribir como:
µ(x)
[dy(x)
dx+ ay(x)
]?≡ d
dx[µ(x)y(x)] .
De esta manera, la funcion µ(x) es una funcion a determinar (en este caso a adivinar). Efectivamente tenemosque si
µ(x) = eax ,
entonces al multiplicar ambos lados de la ecuacion diferencial por µ(x), resulta:
eaxdy(x)
dx+ eaxay(x) = eaxe−x
d
dx[eaxy(x)] = e(a−1)x∫
d [eaxy(x)] =
∫dx e(a−1)x
de forma y manera que:
eaxy(x) =1
a− 1e(a−1)x + C .
Para y(0) = 2:
y(0) = 2 =1
a− 1+ C ⇒ C =
2a− 3
a− 1Una solucion particular sera entonces:
yp(x) =1
a− 1
[e−x + (2a− 3)e−ax
].
Un par comentarios son pertinentes:
Llamaremos al termino µ(x) factor integrador de la ecuacion diferencial. Este factor esta relacionadocon propiedades de simetrıa de la ecuacion, pero en este nivel lo buscaremos tanteando.
La solucion general de esa ecuacion diferencial toma la forma de y(x) = e−x+Ce−ax, donde el segundode los terminos yH(x) = Ce−ax corresponde a la solucion general para la ecuacion homogenea asociada
a esa ecuacion diferencial: dy(x)dx + ay(x) = 0. El otro termino yI(x) = e−x corresponde a la solucion
particular de la inhomogenea: dy(x)dx + ay(x) = e−x.
Esto ultimo sera una propiedad general para ecuaciones diferenciales lineales de cualquier orden. Resolvere-mos la ecuacion homogenea y luego encontraremos una solucion de la inhomogenea. La solucion general serauna suma de ambas soluciones.
En general, para la ecuacion
y′ + ay = g(x) , el factor integrador es: µ(x) = eax
y se tiene la siguiente solucion general
y(x) = e−ax∫ x
x0
dt g(t)eat︸ ︷︷ ︸solucion de la inhomogenea
+ Ce−ax︸ ︷︷ ︸solucion de la homogenea
la demostracion la dejamos como ejercicio para el lector.La figura 6.2 muestra el mapa de ruta para la resolucion de las EDO lineales.
184

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
Figura 6.2: Mapa de las ecuaciones diferenciales explıcitas
6.1.5. Metodo de las isoclinas
Este metodo se basa en la idea de campo y curvas integrales que vimos cuando estudiamos camposvectoriales. La idea es bien simple, en general, una ecuacion diferencial de primer orden (explıcita respectoa la derivada) se podra representar como:
y′ = f(y, x) . (6.1)
Ahora bien, el lado derecho de esa igualdad lo representa una funcion de dos variables, la cual tendra unvalor en cada punto (x, y). Ese valor (por la igualdad que representa la ecuacion diferencial) sera el valor dela derivada en ese punto y el valor de la derivada en un punto, no es otra cosa que la pendiente de la rectatangente a una curva en ese punto. Con eso, al construir una grafica recordamos las curvas integrales de loscampos vectoriales y reconstruimos las curvas solucion a partir de sus tangentes.
Tenemos entonces que si y = f(x) o f(x, y) = 0 define y como una funcion de x que satisface y′ = f(y, x)sobre un intervalo a < x < b, entonces el grafico de esta funcion se denomina una curva integral y a latotalidad de esas curvas se le llama un campo de direcciones. A las curvas con la propiedad: y′ = f(x, y) =constante se le denominan isoclinas (igual pendiente).
Por ejemplo, si consideramos la EDO:
y′ =y
x⇒ y = Cx ← curva integral. (x 6= 0 , y 6= 0) .
O para la ecuacion
y′ = −xy⇒ x2 + y2 = C2 ← curva integral. (x 6= 0 , y 6= 0) .
185

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
(a) (b)
Figura 6.3: Isoclinas para los ejemplos (a) y (b)
Cuando por un punto pasa mas de una curva integral lo llamaremos un punto singular y para los puntospor donde pase una y solo una curva integral le llamaremos puntos ordinarios.
La Figura 6.3 contiene la representacion grafica para las tangentes de las siguientes ecuaciones diferen-ciales:
(a) y′ = e−x − 1
3y (b) y′ =
y
x
y la Figura 6.4 las de
(c) y′ = −xy
(d) y′ = 1 + xy
En el Cuadrante (a) de la Figura 6.3 se muestran las soluciones particulares para las condiciones iniciales:y(0) = 0,75, 0,50, 0, −0,50, −0,75. El Cuadrante (b) de la misma figura corresponde a las tangentesgeneradas a partir de la ecuacion diferencial. Notese que son curvas integrales radiales y que para el puntox = 0 no esta definida la curva integral. En el Cuadrante (c), de la Figura 6.4, se representan las tangentesde la ecuacion. Finalmente el Cuadrante (d) contiene las tangentes a la ecuacion diferencial, en ella se hanindicado las curvas integrales para las soluciones particulares correspondientes a las condiciones iniciales:y(0) = 0,75, 0,50, 0, −0,50, −0,75.
Es importante senalar que este metodo permite obtener las posibles soluciones de una ecuacion diferencialno importa lo complicada que se
6.1.6. Ecuaciones diferenciales homogeneas
Primero que todo, definamos que son las funciones homogeneas de grado n.
Definicion: Diremos que una funcion f(x, y) es homogenea de grado n si
f(tx, ty) = tnf(x, y) ⇔
si w =
y
x⇒ f(x, y) = xng(w)
si w =x
y⇒ f(x, y) = ynh(w)
186

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
(c) (d)
Figura 6.4: Isoclinas para los ejemplos (c) y (d)
donde n es una constante y t > 0.
Las funciones homogeneas indican un comportamiento particular cuando cambiamos la escala de susvariables. Se utilizan con bastante frecuencia en hidrodinamica y termodinamica.
Por ejemplo, la siguiente funcion:
f(x, y) = x2 + y2 ln(yx
)es una funcion homogenea de grado 2, ya que:
f(tx, ty) = (tx)2 + (ty)2 ln
(ty
tx
)⇒ f(tx, ty) = t2
[x2 + y2 ln
(yx
)]= t2f(x, y) .
Definicion: Una ecuacion diferencial ordinaria de primer orden
P (x, y)dx+Q(x, y)dy = 0 , (6.2)
sera una ecuacion diferencial con coeficientes homogeneos si:
Q(x, y) y P (x, y) son homogeneas de grado n .
Teorema: Si los coeficientes P (x, y) y Q(x, y) de una ecuacion diferencial son homogeneos de orden n,entonces la siguiente sustitucion: y = ux, convertira la ecuacion diferencial en una ecuacion diferencialdonde las variables son separables.
Demostracion Como P (x, y) y Q(x, y) son funciones homogeneas de orden n (hipotesis) entonces:
P (x, y) = xnf(u) y Q(x, y) = xng(u) ,
187

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
sustituyendo en la ecuacion diferencial (6.2):
xnf(u)dx+ xng(u)(udx+ xdu) = 0
[f(u) + ug(u)] dx+ xg(u)du = 0
[f(u) + ug(u)]dx
x+ g(u)du = 0
dx
x+
g(u)du
f(u) + ug(u)= 0 ,
donde x 6= 0 y f(u) + ug(u) 6= 0. JEl lector, debe demostrar que la sustitucion x = uy tambien convierte la ecuacion diferencial en una de
variables separables.Notese que exigir que Q(x, y) y P (x, y) sean funciones homogeneas de grado n, equivale a imponer que
dy(x)
dx=P (x, y)
Q(x, y)≡ F
(yx
)donde F
(yx
)es homogena de grado 0 ,
con lo cual estamos diciendo que si los coeficientes Q(x, y) y P (x, y) son funciones homogeneas de grado n,la ecuacion diferencial es invariante de escala.
Consideremos la siguiente ecuacion diferencial no linea
xy′ =√x2 − y2 + y
Esto es
(√x2 − y2 + y
)dx− xdy = 0 ⇒
P (tx, ty) =
√(tx)2 − (ty)2 + ty = t
(√x2 − y2 + y
)Q(tx, ty) = −tx
los coeficientes son funciones homogeneas de grado 1 y por lo tanto al hacer y = ux tendremos
x(√
1− u2 + u)
dx− x(udx+ xdu) = 0 ⇒ ±√
1− u2dx− xdu = 0 ⇒∫
dx
x= ±
∫du√
1− u2.
Notemos que: u 6= ±1 y x 6= 0. Integramos y, finalmente, llegamos a
ln |x| = arcsen(u) + C ⇒ ln |x| = arcsen(yx
)+ C , para
∣∣∣yx
∣∣∣ < 1 con x > 0
− ln | − x| = arcsen(u) + C ⇒ − ln | − x| = arcsen(yx
)+ C , para
∣∣∣yx
∣∣∣ < 1 con x < 0 .
En este caso tenemos que u =∣∣∣yx
∣∣∣ = 1 ⇒ y = ±x tambien es solucion.
6.1.7. Ecuaciones isobaras
Las ecuaciones isobaras generalizan a las ecuaciones homogeneas por cuanto los coeficientes de la ecua-cion Q(x, y) y P (x, y) no son funciones homogeneas del mismo grado y se busca una transformacion que
188

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
convierta la ecuacion en homogenea. Es decir, si la dimensionalidad en potencias de y es la misma que ladimensionalidad en potencias de x. Diremos que una ecuacion diferencial es isobara si cumple con
P (x, y)dx + Q(x, y)dy = 0
⇓Q(tx, tmy) → tnP (x, y)
P (tx, tmy) → tn−m+1Q(x, y)
y el cambio de variable que se impone es y = vxm. Con lo cual habra que estudiar si es posible “balancear”el orden de las dimensionalidades de variables y funciones.
Tratemos con un ejemplo para ilustrar las ecuaciones isobaras. Consideremos la ecuacion
2xyy′ + y2 +2
x= 0 , entonces,(
y2 +2
x
)dx+ 2xydy = 0 ⇒
{x→ x ↔ dx = dxy → zm ↔ dy = mzm−1dz
En la contabilidad de los exponentes de x aporta un peso de 1 mientras que y aporta un peso de m. Laintencion es balancear los terminos para que la ecuacion sea homogenea de grado n. Esto es(
z2m +2
x
)dx + 2xzmmzm−1dz = 0(
z2m +2
x
)dx + 2mxz−1z2mdz = 0 ⇒ m = −1
2⇒ y = vxm ⇒ y =
v√x
El exponente del primer termino es 2m, del segundo −1 del tercero 2m. Al balancear todos los exponentestendremos 2m = −1, con lo cual m = − 1
2 .(v2
x+
2
x
)dx+ 2x
v√x
(dv√x− 1
2
v
x√x
dx
)= 0 ⇒ vdv +
dx
x= 0
entonces al integrar y devolver el cambio v = y√x tendremos∫
dv v +
∫dx
x= 0 ⇒ v2
2+ ln |x| = c ⇒ 1
2y2x+ ln |x| = c .
6.1.8. Ecuaciones diferenciales exactas
El segundo grupo de estrategias apunta a escribir una ecuacion diferencial como una derivada total de unconjunto de funciones. Uno se ayuda en una posible funcion que pueda acomodar los terminos de la ecuacion.Esa funcion se denomina factor integrador, para una ecuacion diferencial lineal de primer orden
dy(x)
dx+ f(x)y(x) = g(x) ,
al multiplicar a ambos lados por µ(x) resulta
µ(x)dy(x)
dx+ µ(x)f(x)y(x) = µ(x)g(x) ,
189

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
por otro lado, tenemos y queremos que
d
dx[µ(x)y(x)] ≡ µ(x)
dy(x)
dx+
dµ(x)
dxy(x) = µ(x)g(x) ,
para que esas dos ultimas ecuaciones sean equivalentes los coeficientes de y(x) tienen que ser iguales, es decir,
dµ(x)
dx= µ(x)f(x) ⇒
∫dµ(x)
µ(x)=
∫dx f(x) ⇒ µ(x) = e
∫dx f(x)
Con lo cual hemos demostrado que para una ecuacion lineal de primer orden, siempre es posible encontrarun factor integrador µ(x) tal que la ecuacion diferencial pueda ser expresada como una derivada total delfactor integrador y la funcion incognita.
dy(x)
dx+ f(x)y(x) = g(x) ⇒ d
dx[µ(x)y(x)] = µ(x)g(x) ⇒ y(x) =
1
µ(x)
[∫dxµ(x)g(x) + C
]donde µ(x) = e
∫dx f(x) .
Definicion: Una ecuacion diferencial de la forma
P (x, y)dx+Q(x, y)dy = 0 ,
se llama una ecuacion diferencial exacta si esta es el diferencial total de alguna funcion f(x, y), es decir,si:
P (x, y) =∂
∂xf(x, y) y Q(x, y) =
∂
∂yf(x, y) .
Teorema: Una condicion necesaria y suficiente para que la ecuacion diferencial
P (x, y)dx+Q(x, y)dy = 0 ,
sea exacta es que:∂
∂yP (x, y) =
∂
∂xQ(x, y) ,
donde las funciones: P (x, y), Q(x, y), ∂yP (x, y), ∂xQ(x, y) deben existir y ser contınuas.
Demostracion Vamos a probar que si: P (x, y)dx+Q(x, y)dy = 0, entonces: ∂yP (x, y) = ∂xQ(x, y).Como la ecuacion es exacta, por la definicion anterior se tiene que:
P (x, y) =∂
∂xf(x, y) ∧ Q(x, y) =
∂
∂yf(x, y) ,
y como suponemos que P (x, y), Q(x, y), ∂yP (x, y), ∂xQ(x, y) existen y son contınuas:
∂
∂y
∂
∂xf(x, y) ∧ ∂
∂x
∂
∂yf(x, y) ∃ ,
y como:∂
∂y
∂
∂xf(x, y) =
∂
∂x
∂
∂yf(x, y) ,
190

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
por lo tanto tenemos que una condicion necesaria es:
∂
∂yP (x, y) =
∂
∂xQ(x, y) .
Por otro lado, probemos que si: ∂yP (x, y) = ∂xQ(x, y) entonces: P (x, y)dx+Q(x, y)dy = 0 es exacta.Ası, para una ecuacion diferencial que pueda ser escrita como
d [f(x, y)] = 0?⇔ P (x, y)dx+Q(x, y)dy = 0 ⇒ d [f(x, y)] =
∂f(x, y)
∂xdx+
∂f(x, y)
∂ydy = 0
donde f(x, y) sera la funcion a determinar.Entonces tendremos que la condicion necesaria y suficiente para que una ecuacion diferencial sea exacta
es
P (x, y)⇔ ∂f(x, y)
∂x
Q(x, y)⇔ ∂f(x, y)
∂y
⇒ ∂2f(x, y)
∂y∂x≡ ∂2f(x, y)
∂x∂y⇔ ∂P (x, y)
∂y≡ ∂Q(x, y)
∂x⇒ d [f(x, y)] = 0
Si esto se cumple entonces, podremos encontrar la funcion f(x, y) integrando respecto a cualquiera delas variables (ahora consideradas independientes ambas)
P (x, y) ≡ ∂f(x, y)
∂x⇔ f(x, y) =
∫ x
x0
P (u, y)du+ S(y)⇒ Q(x, y) =∂f(x, y)
∂y=
∂
∂y
∫ x
x0
P (u, y)du+dS(y)
dy
entonces
Q(x, y) =
∫ x
x0
∂P (u, y)
∂ydu+
dS(y)
dy≡∫ x
x0
∂Q(v, y)
∂vdv +
dS(y)
dy= Q(v, y)|v=x
v=x0+
dS(y)
dy
con lo cual nos queda finalmente otra ecuacion diferencial para encontrar S(y) y con ella f(x, y). Esto es
dS(y)
dy= Q(x0, y) ⇒ S(y) =
∫ y
y0
Q(x0, w)dw ⇒ f(x, y) =
∫ x
x0
P (u, y)du+
∫ y
y0
Q(x0, w)dw = C . J
Hay que hacer notar que los segmentos de lınea que unen el punto (x0, y0) con los puntos genericos(x, y0)∧ (x0, y) pertenecen al entorno de (x0, y0). Este tipo de entornos tambien se denomina multiplementeconexo.
Notemos que ademas de demostrar el teorema tambien encontramos una familia 1-parametrica de solu-ciones:
f(x, y) =
∫ x
x0
P (u, y)du+
∫ y
y0
Q(x0, w)dw = C .
Consideremos la siguiente ecuacion diferencial no lineal
[xsen(y)− y2]y′ = cos(y) .
Entonces:
y′[xsen(y)− y2
]= cos(y) ⇔ cos(y) dx−
(xsen(y)− y2
)dy = 0 ⇒
P (x, y) = cos(y)
Q(x, y) = −(xsen(y)− y2
)191

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
y verificamos que esta ecuacion diferencial es exacta, ya que
∂Q(x, y)
∂x=∂P (x, y)
∂y= − sen(y) ⇒ f(x, y) =
∫ x
x0
P (u, y)du+
∫ y
y0
Q(x,w)dw = C
con lo cual, si particularizamos el punto (x0, y0) ≡ (0, 0) tendremos que
f(x, y) =
∫ x
x0
cos(y)du+
∫ y
y0
w2dw = C ⇒ x cos(y) +y3
3= C
6.1.9. Ecuaciones diferenciales lineales de orden 1
Una ecuacion diferencial lineal de orden 1
dy(x)
dx+ f(x)y(x) = g(x) ,
no es exacta, ya que:
[f(x)y(x)− g(x)] dx+ dy = 0 ⇒
P (x, y) = f(x)y(x)− g(x)
Q(x, y) = 1⇒ ∂Q
∂x6= ∂P
∂y.
pero como ya vimos, si µ(x) es un factor integrador, entonces:
µ(x) [f(x)y(x)− g(x)] dx+ µ(x)dy = 0 ⇒
P (x, y) = µ(x) [f(x)y(x)− g(x)]
Q(x, y) = µ(x)
y por lo tanto
∂xµ(x) = ∂y{µ(x) [f(x)y(x)− g(x)]}dµ(x)
dx= µ(x)f(x)
dµ(x)
µ(x)= f(x)dx ⇒
∫dµ(x)
µ(x)=
∫f(x)dx ⇒ ln |µ(x)| =
∫f(x)dx ,
es decir,µ(x) = e
∫f(x)dx .
Esto significa que para las ecuaciones lineales de orden 1 se tiene
e∫f(x)dx [f(x)y(x)− g(x)] dx+ e
∫f(x)dxdy = 0 ⇒
P (x, y) = e∫f(x)dx [f(x)y(x)− g(x)]
Q(x, y) = e∫f(x)dx
por lo tanto ahora es una ecuacion exacta, ya que:
∂P
∂y⇒ ∂y
[e∫f(x)dxf(x)y(x)− e
∫f(x)dxg(x)
]= f(x)e
∫f(x)dx
∂Q
∂x⇒ ∂x
[e∫f(x)dx
]= f(x)e
∫f(x)dx
192

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
Volviendo a la ecuacion original multiplicada por el factor integrador que la convierte en exacta, podemosescribir:
e∫f(x)dxf(x)y(x)dx− e
∫f(x)dxg(x)dx+ e
∫f(x)dxdy = 0
e∫f(x)dxdy + e
∫f(x)dxf(x)y(x)dx = e
∫f(x)dxg(x)dx
d[y(x)e
∫f(x)dx
]= e
∫f(x)dxg(x)dx
y(x)e∫f(x)dx =
∫e∫f(x)dxg(x)dx+ C .
Llegamos entonces a la formula que nos dara la solucion general para cualquier ecuacion diferencial linealde orden 1.
y(x) =1
e∫f(x)dx
∫e∫f(x)dxg(x)dx+
C
e∫f(x)dx
. (6.3)
En realidad, lo anterior se puede formalizar con el siguiente teorema para el problema de valores iniciales.Consultar la bibliografıa recomendada para estudiar su demostracion
Teorema: Sean las funciones F y ∂yF funciones continuas en algun intervalo a < x < b y c < y < d quecontienen al punto (x0, y0). Entonces, en algun intervalo x0 − ε < x < x0 + ε contenido en a < x < b,existe una unica solucion y = y(x) del problema de valores iniciales:
dy(x)
dx= F (x, y) , con y(x0) = y0 .
Por ejemplo, se la ecuacion
y′ − 2xy = ex2
.
Aquı: f(x) = −2x y g(x) = ex2
. Por lo tanto, el factor integrador es:
µ(x) = e∫f(x)dx = e
∫−2xdx = e−x
2
.
y la solucion viene a ser:
y(x) =1
e−x2
∫e−x
2
ex2
dx+C
e−x2 = ex2
(x+ C) .
6.1.10. Ecuaciones diferenciales no lineales y el factor integrador
Del mismo modo, y con la misma idea, podemos incorporar el factor integrador µ(x, y) para extenderla idea a ecuaciones que no sean, necesariamente lineales. Ası para una ecuacion diferencial que pueda serescrita como
d [f(x, y)] = 0?⇔ µ(x, y)Q(x, y)dy + µ(x, y)P (x, y)dx = 0
es decir
d [f(x, y)] =∂f(x, y)
∂xdx+
∂f(x, y)
∂ydy = µ(x, y)Q(x, y)dy + µ(x, y)P (x, y)dx = 0
Entonces tendremos que la condicion necesaria y suficiente para que una ecuacion diferencial sea exacta es:
µ(x, y)P (x, y)⇔ ∂f(x, y)
∂x
µ(x, y)Q(x, y)⇔ ∂f(x, y)
∂y
⇒∂2f(x, y)
∂y ∂x≡ ∂2f(x, y)
∂x ∂y⇔ ∂
∂y[µ(x, y)P (x, y)] ≡ ∂
∂x[µ(x, y)Q(x, y)]
193

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
y, obviamente, esta condicion de integrabilidad dependera del µ(x, y) que propongamos. Veamos algunoscasos:
1. Si µ(x, y) = µ(x) entonces la condicion es
µ(x)∂P (x, y)
∂y=
dµ(x)
dxQ(x, y) + µ(x)
∂Q(x, y)
∂x⇒ 1
µ(x)
dµ(x)
dx=
1
Q(x, y)
[∂P (x, y)
∂y− ∂Q(x, y)
∂x
]con lo cual, si se cumple que
1
Q(x, y)
[∂P (x, y)
∂y− ∂Q(x, y)
∂x
]= f(x) =
1
µ(x)
dµ(x)
dx⇒ µ(x) = e
∫dx f(x)
podremos determinar el factor integrador.
Una vez identificado procedemos a integrar, formalmente f(x, y)
f(x, y) = µ(x)
∫ y
y0
Q(x, u)du+ S(x) ⇒ ∂f(x, y)
∂x= µ(x)P (x, y) ≡ ∂
∂x
[µ(x)
∫ y
y0
Q(x, u)du+ S(x)
]y finalmente, una vez mas
µ(x)P (x, y) =
∫ y
y0
∂µ(x)Q(x, u)
∂xdu+
dS(x)
dx⇒ µ(x)P (x, y) =
∫ y
y0
∂µ(x, u)P (x, u)
∂udu+
dS(x)
dx
con lo cual
S(x) =
∫ x
x0
µ(u, y0)P (u, y0)du ⇒ f(x, y) = µ(x)
∫ y
y0
Q(x, u)du+
∫ x
x0
µ(u, y0)P (u, y0)du+ C .
Por ejemplo, consideremos la siguiente ecuacion diferencial
cos(y)y′ = −ex + sen(y) .
Esta ecuacion no es exacta, ya que:
[ex − sen(y)] dx+ cos(y)dy = 0 ⇒
P (x, y) = ex − sen(y)
Q(x, y) = cos(y)⇒ ∂Q
∂x= 0 6= ∂P
∂y= − cos(y) .
Podemos ver que el arreglo:
f(x) =1
Q(x, y)
[∂P (x, y)
∂y− ∂Q(x, y)
∂x
]=− cos(y)− 0
cos(y)= −1 ,
entonces, el factor integrante es exacta:
µ(x) = e∫
dx f(x) = e−∫
dx = e−x .
Por lo tanto, la ecuacion
e−x [ex − sen(y)] dx+e−x cos(y)dy = 0 ⇒
P (x, y) = 1− e−xsen(y)
Q(x, y) = e−xcos(y)⇒ ∂Q
∂x=∂P
∂y= −e−x cos(y) .
Queda como ejercicio resolver esta ecuacion diferencial.
194

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
2. Si µ(x, y) = µ(y) entonces la condicion queda como
du(y)
dyP (x, y) + µ(y)
∂P (x, y)
∂y= µ(y)
∂Q(x, y)
∂x⇒ 1
µ(y)
dµ(x)
dx=
1
P (x, y)
[∂Q(x, y)
∂x− ∂P (x, y)
∂y
],
con lo cual si se cumple que
1
P (x, y)
[∂Q(x, y)
∂x− ∂P (x, y)
∂y
]= f(y) =
1
µ(y)
dµ(y)
dy⇒ µ(y) = e
∫dy f(y)
y podremos determinar el factor integrador.
Es claro que otras cambios de variables apropiados, como µ = µ(z) donde z = xy, pueden hacer posibleencontrar un factor integrante.
6.1.11. Ecuacion de Bernoulli
La ecuacion de Bernoulli, formulada por James Bernoulli2 y resuelta por su hermano Johann Bernoulli,se caracteriza por tener la forma:
dy(x)
dx+ y(x)f(x) = y(x)ng(x) . (6.4)
Es facil darse cuenta de que la ecuacion de Bernoulli se reduce a una ecuacion con variables separadascuando n = 0 y cuando n = 1 se trata de una ecuacion de la forma:
dy(x)
dx= y(x) [g(x)− f(x)] .
la cual tambien es de variables separables. Entonces, es la presencia del termino yn lo que hace que laecuacion no sea lineal.
Leibniz, en 1696, indico que el cambio de variable z = y1−n convierte la ecuacion (6.4) en una ecuacionlineal.
Consideremos entonces n 6= 1, si multiplicamos ambos lados de (6.4) por (1− n)y−n resulta:
(1− n)y−n[
dy
dx+ yf(x)
]= (1− n)y−nyng(x)
(1− n)y−ndy
dx+ (1− n)f(x)y1−n = (1− n)g(x)
d
dx
[y1−n]+ (1− n)f(x)y1−n = (1− n)g(x) ,
si se hace el cambio de variable z = y1−n se tiene
dz
dx+ (1− n)f(x) z = (1− n)g(x) . (6.5)
La ecuacion (6.5) es una ecuacion diferencial lineal, la cual ya sabemos resolver.Ejemplo, sea la ecuacion:
y′ + xy =x
y3, con y 6= 0 .
2James Bernoulli (1654-1705), fue un matematico y cientıfico suizo, formaba parte de la gran familia Bernoulli. En 1690 seconvirtio en la primera persona en desarrollar la tecnica para resolver ecuaciones diferenciales separables.
195

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
Esta ecuacion es de la forma (6.4) con n = −3. Si multiplicamos por 4y3 se tiene:(4y3)y′ +
(4y3)xy =
(4y3) xy3(
4y3)y′ + 4xy4 = 4x
d
dx
[y4]
+ 4xy4 = 4x
con el cambio de variable z = y4, resultadz
dx+ 4xz = 4x ,
la cual es una ecuacion diferencial lineal con factor integrador
µ(x) = e∫
dx f(x) = e∫
4xdx = e2x2
,
Por lo tanto, la solucion vendra dada por
y(x) =1
e2x2
∫e2x2
(4x)dx+C
e2x2 =1
e2x2
[e2x2
]+
C
e2x2 = 1 + Ce−2x2
.
6.1.12. Ecuacion de Riccati
La ecuacion de Riccati3 es conocida como una ecuacion diferencial no lineal que tiene la siguiente forma:
dy(x)
dx= A(x) +B(x)y(x) + C(x)y(x)2 , C(x) 6= 0 . (6.6)
Esta ecuacion fue estudiada por muchos matematicos, entre ellos los propios integrantes de la familiaBernoulli. Daniel Bernoulli, hijo de John y sobrino de James Bernoulli, publico su solucion en 1724, luegode mantenerla oculta por mucho tiempo en modo de anagrama.
Podemos seguir las recomendaciones de Euler4 quien propuso que una sustitucion del tipo:
y(x) = y1(x) +1
z(x), (6.7)
donde y1(x) es una solucion particular de (6.6), convierte la ecuacion de Riccati en una ecuacion linealpara z(x). Al sustituir (6.7) en (6.6) resulta lo siguiente:
dy1
dx− 1
z2
dz
dx= A(x) +B(x)
[y1 +
1
z
]+ C(x)
[y1 +
1
z
]2
z2 dy1
dx− dz
dx=
[A(x) +B(x)y1 + C(x)y2
1
]z2 + [2C(x)y1 +B(x)] z + C(x)
−dz
dx=
[A(x) +B(x)y1 + C(x)y2
1 −dy1
dx
]︸ ︷︷ ︸
=0
z2 + [2C(x)y1 +B(x)] z + C(x)
3El conde Jacopo Francesco Riccati (1676-1754) fue un matematico veneciano, que estudio detalladamente la hidrodinamicasobre la base de la mecanica newtoniana.
4Leonhard Paul Euler nacio el 15 de abril de 1707 en Basilea, Suiza y murio el 18 de septiembre de 1783 en San Petersburgo,Rusia. Fue un reputado matematico y fısico, y es considerado uno de los mas grandes matematicos de la historia.
196

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
por lo tanto:dz
dx= − [2C(x)y1 +B(x)] z − C(x) . (6.8)
Tambien podemos hacer la siguiente sustitucion
y(x) = y1(x) + u(x) (6.9)
donde y1(x) es una solucion particular de (6.6). Esto es, al sustituir (6.9) en (6.6) resulta:
dy1
dx+
du
dx= A(x) +B(x) [y1 + u] + C(x)
[y2
1 + 2y1u+ u2]
dy1
dx+
du
dx= A(x) +B(x)y1 + C(x)y2
1 + [B(x) + 2C(x)y1]u+ C(x)u2
du
dx= [B(x) + 2C(x)y1]u+ C(x)u2 ,
es decir:du
dx− [B(x) + 2C(x)y1]u = C(x)u2 , (6.10)
que no es mas que la ecuacion de Bernoulli (6.4) con f(x) = − [B(x) + 2C(x)y1], g(x) = C(x) y n = 2.Como un ejemplo, resolvamos la siguiente ecuacion de Riccati
y′ = y2 − 2
x2,
conociendo la solucion particular y1 = 1/x.En lugar de hacer todo el desarrollo anterior, podemos reconocer de manera facil que:
A(x) = − 2
x2, B(x) = 0 , C(x) = 1 .
Tenemos entonces dos posibilidades: la primera es utilizar la ecuacion lineal (6.8)
dz(x)
dx= −
[2
x
]z(x)− 1 ⇒ z(x) = −1
3x+
c
x2.
por lo tanto, al volver a la variable y(x):
y(x) =1
x+
1
− 13 x+ c
x2
= − 2x3 + 3 c
x (x3 − 3 c).
La segunda, es resolver la ecuacion de Bernoulli (6.10) con n = 2
du(x)
dx−[
2
x
]u(x) = u(x)2 ⇒ u(x) = − 3x2
x3 − 3 c,
y en funcion de y(x)
y(x) =1
x− 3x2
x3 − 3 c= − 2x3 + 3 c
x (x3 − 3 c).
197

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
6.1.13. Un tipo muy especial de ecuacion diferencial no lineal
Vamos a estudiar la siguiente ecuacion diferencial:
y′ = − y (Axpyq +Bxrys)
x (Cxpyq +Dxrys),
donde A,B,C,D son constantes.La ecuacion diferencial puede ser escrita como:
y (Axpyq +Bxrys) dx+ x (Cxpyq +Dxrys) dy = 0 .
Y se puede demostrar que el factor integrante sera de la forma
µ(x, y) = xayb ,
donde a y b son constantes a determinar. Veamos un ejemplo.Veamos un ejemplo:
y(2x2y3 + 3
)dx+ x
(x2y3 − 1
)dy = 0 ,
entonces: P (x, y) = y(2x2y3 + 3
)Q(x, y) = x
(x2y3 − 1
) ⇒ ∂Q
∂x= 3x2y3 − 1 6= ∂P
∂y= 8x2y3 + 3
La ecuacion no es exacta.Si µ(x, y) = xayb es un factor integrante, resulta que:(
xayb) (
2x2y4 + 3y)
dx +(xayb
) (x3y3 − x
)dy = 0(
2x2+ay4+b + 3xay1+b)
dx +(x3+ay3+b − x1+ayb
)dy = 0
y sera exacta si ∂yP = ∂xQ, esto es
∂yP = 2x2+a(4 + b)y3+b + 3xa(1 + b)yb = (3 + a)x2+ay3+b − (1 + a)xayb = ∂xQ ,
si multiplicamos por 1/(xayb) la ecuacion anterior queda como:
2(4 + b)x2y3 + 3(1 + b) = (3 + a)x2y3 − (1 + a) ,
igualando coeficientes resulta 8 + 2b = 3 + a
3 + 3b = −1− a⇒ a =
7
5, b = −9
5.
Por lo tanto el factor integrador es µ(x, y) = x7/5y−9/5.Queda como ejercicio verificar que con este factor integrador la ecuacion original es exacta.
198

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
6.1.14. Solucion parametrica: ecuaciones no resueltas respecto a la derivada
Podemos preguntarnos sobre los casos donde no es posible despejar y′ de la ecuacion diferencial ordinariade primer orden: F [x, y(x), y′(x)] = 0.
Varias situaciones pueden aparecer:
F [x, y(x), y′(x)] = 0 ⇒
F [y′(x)] = 0
F [x, y′(x)] = 0
F [y(x), y′(x)] = 0
F [x, y(x), y′(x)] = 0
Veamos todos estos casos:
1. F [y′(x)] = 0
Como F [y′(x)] = 0 no contiene ni a x ni a y(x), entonces sı existe al menos una raız κi de la ecuacionF [y′(x)] = 0 entonces
y′ = κi ⇒ y(x) = κix+ C ⇒ κi =y(x)− C
x.
Por lo tanto
F[y(x)− C
x
]= 0 ,
es la integral de la ecuacion diferencial.
Ejemplo: la solucion de la ecuacion
(y′)7 − (y′)5 + y′ + 3 = 0 ,
es (y(x)− C
x
)7
−(y(x)− C
x
)5
+y(x)− C
x+ 3 = 0
2. F [x, y′(x)] = 0
Si se puede despejar x, entones podemos hacer los siguientes cambios de variable x = f(t)
y′ = g(t)⇒
dx = f ′(t) dt
dy = g(t) dx⇒ dy = g(t)f ′(t) dt ⇒
y(x) =∫g(t)f ′(t) dt+ C
x = f(t)
Este tipo de soluciones se conocen como soluciones parametrizadas.
Ejemplo: la ecuacion(y′)3 − y′ = 1 + x .
Hacemos entonces los siguientes cambios de variables x = t3 − t− 1
y′ = t⇒
dx = (3t2 − 1) dt
dy = tdx⇒ dy = t(3t2 − 1) dt
199

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
integrando: ∫
dy =∫t(3t2 − 1) dt
x = t3 − t− 1⇒
y(x) = t2
4 (3t2 − 2) + C
x = t3 − t− 1
3. Caso: F [y(x), y′(x)] = 0
a) Se puede despejar y(x), es decir: y = f(y′). Entonces hacemos los siguientes cambios de variables: y′ = z
y = f(z)⇒
dy = z dx
dy = f ′(z) z′ dx⇒ z(x) =
df
dz
dz
dx⇒ dx =
df
dz
dz
z
Por lo tanto, la solucion parametrica sera x =∫
dfdz
dzz + C
y = f(z)
Ejemplo: la ecuaciony = a(y′)2 + b(y′)3 , a y b = constantes
Tenemos entonces: y′ = z
y = az2 + bz3⇒ dx = (2az + 3bz2)
dz
z
la solucion parametrica es : x =∫
(2a+ 3bz) dz + C
y = az2 + bz3⇒
x = 2az + 32bz
2 + C
y = az2 + bz3.
En el caso de que queramos obtener y(x) podemos intentar despejar z de la primera ecuacion, eneste caso esto es posible
z(x) = − 1
3b
[2 a±
√4 a2 + 6 b(x− C)
],
y sustituir en la segunda:
y(x) =1
27b2
(2 a±
√4 a2 + 6 b(x− C)
)2 (a∓
√4 a2 + 6 b(x− C)
).
b) No se puede despejar y′ ni y de F [y(x), y′(x)] = 0, pero puede existir un parametro tal que y = f(t)
y′ = g(t)⇒
dy = f ′(t) dt
dy = g(t) dx⇒ f ′(t) dt = g(t) dx ⇒ f ′(t)
g(t)dt = dx
La solucion parametrica es entonces la siguiente:∫ f ′(t)
g(t) dt = x+ C
y = f(t)
.
200

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
Ejemplo: la ecuaciony2/3 + (y′)2/3 = 1 ,
tenemos entonces: y = cos3(t)
y′ = sen3(t)⇒ −3 cos2(t)sen(t)
sen3(t)dt = dx
Por lo tanto −3∫
cot2(t)dt = x+ C
y = cos3(t)⇒
x = 3 [cot(t) + t] + C
y = cos3(t)
4. Caso: F [x, y(x), y′(x)] = 0
a) Si se puede despejar la funcion y, entonces y = G(x, y′). En este caso consideramos la siguientesustitucion: y′ = z(x)
y = G(x, y′) = G(x, z) ⇒ dy = ∂xG dx+ ∂zG dz = z dx ,
por lo tanto:
z = ∂xG + ∂zGdz
dx⇒
φ(x, z, C) = 0
y = G(x, z)
b) Si se puede despejar a la variable x, entonces x = H(y, y′). Como en el caso anterior tenemos lasiguiente sustitucion: y′ = z(x)
x = H(y, y′) = H(y, z) ⇒ dx = ∂yH dy + ∂zH dz .
Si multiplicamos por z, se tiene
zdx = z [∂yH dy + ∂zH dz]
por lo tanto:
dy = z [∂yH dy + ∂zH dz] ⇒
φ(y, z, C) = 0
x = H(x, z)
Aquı podemos considerar dos tipos de ecuaciones bien conocidas:
y = xf(y′) + g(y′) → Ecuac. de Lagrange
y un caso particular de la ecuacion de Lagrange:
y = xy′ + g(y′) → Ecuac. de Clairaut
En cuanto a la ecuacion de Clairaut podemos notar que al reemplazar y′ por el parametro m, lo quese obtiene es la ecuacion de la lınea recta
y = mx+ f(m) .
201

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
Por ejemplo, la solucion de la ecuacion de Clairaut: y = xy′+(y′)2 es la familia de rectas con pendientem, es decir: y(x) = mx+m2.
Ejemplo: Sea la ecuaciony = x(y′)2 − (y′)−1 ⇒ y = G(x, y′) .
Tenemos entonces: y′ = z
y = xz2 − z−1⇒
dy = z dx
dy = z2 dx+(2xz + 1
z2
)dz
⇒ z dx = z2 dx+
(2xz +
1
z2
)dz
es decir:
z = z2 +
(2xz +
1
z2
)dz
dx
1 = z +
(2x+
1
z3
)dz
dx
dx
dz= z
dx
dz+ 2x+
1
z3
(z − 1)dx
dz+ 2x = − 1
z3
dx
dz+
2x
z − 1= − 1
z3(z − 1).
Esta ultima ecuacion es una ecuacion diferencial lineal, por lo tanto, la sabemos resolver
x(z) =1
e∫f(z)dz
∫e∫f(z)dzg(z)dz +
C
e∫f(z)dz
=1
e∫
2z−1 dz
∫e∫
2xz−1 dz
[− 1
z3(z − 1)
]dz +
C
e∫
2xz−1 dz
= − 1
(z − 1)2
∫z − 1
z3dz +
C
(z − 1)2
=2Cz2 + 2 z − 1
2 (z − 1)2z2
La solucion, en forma parametrica, a la ecuacion diferencial es entoncesx(z) =
2 z(Cz + 1)− 1
2 (z − 1)2z2
y(x) = xz2 − z−1
.
6.1.15. El metodo de las envolventes
Hemos descrito varios metodos para obtener una familia 1-parametrica de soluciones a la ecuacionF [x, y(x), y′(x)] = 0. Si esta familia de soluciones f(x, y, C) = 0 no es una solucion general, entonces elproblema de encontrar una solucion particular puede llegar a ser complejo. Sin embargo, en algunos casos,existe un metodo para encontrar soluciones particulares de una ecuacion diferencial de primer orden, estemetodo tiene que ver con el concepto de envolvente de una familia de curvas. Primero veamos que significauna envolvente de manera conceptual
202

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
Una curva Γ se denomina una envolvente de una familia de curvas f(x, y, C) = 0 si se cumplen lassiguientes dos propiedades
1. En cada punto de la envolvente existe un unico miembro de la familia tangente al punto.
2. Todo miembro de la familia de curvas es tangente a la envolvente en un punto distinto de la envolvente.
El siguiente teorema nos suministra una condicion suficiente para que exista una envolvente de la familiade curvas f(x, y, C) = 0.
Teorema: Si la funcion f(x, y, C) = 0 es una funcion dos veces diferenciable para un conjunto de valoresx, y, C, y si para este conjunto de valores se cumple que:
f(x, y, C) = 0 , ∂cf(x, y, C) = 0 ,∣∣∣∣∣∣∂xf ∂yf
∂cxf ∂cyf
∣∣∣∣∣∣ 6= 0 , ∂ccf 6= 0 ,
entonces, la familia de curvas f(x, y, C) = 0 tiene una envolvente cuya ecuacion parametrica estaradada por: f(x, y, C) = 0
∂cf(x, y, C) = 0
Por ejemplo, vamos a ver si la siguiente familia de curvas
y = cos(x+ C) ,
posee una envolvente.Tenemos entonces:
f(x, y, C) = y − cos(x+ C) ⇒ ∂c[y − cos(x+ C)] = sen(x+ C) = 0 ⇒ x+ C = π/2
por otro lado ∣∣∣∣∣∣sen(x+ C) 1
cos(x+ C) 0
∣∣∣∣∣∣ = − cos(x+ C) , ∂ccf = cos(x+ C) ,
La funcion cos(x+C) es diferente de cero si x+C 6= π/2, por lo tanto, todos los valores que excluyan ax+ C = π/2 y que satisfacen la ecuacion parametrica y − cos(x+ C) = 0
sen(x+ C) = 0
conforman una envolvente a la familia y = cos(x+ C).Podemos notar lo siguiente, si tomamos la primera de estas curvas: y = cos(x + C), la elevamos al
cuadrado y sumamos con la segunda tambien elevada al cuadrado, resulta:
y2 = cos2(x+ C) + sen2(x+ C) = 1 ⇒ y = ±1 .
Las rectas y = 1 y y = −1 son las envolventes de y = cos(x+ C).
203

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
Envolventes y soluciones
Sea f(x, y, C) = 0 una familia 1-parametrica de soluciones a la ecuacion diferencial y′ = f(x, y). Paraesta familia puede existir o no una envolvente, si la envolvente existe, entonces se tiene que en cada puntode la envolvente hay un miembro de la familia de soluciones tangente a la envolvente. Esto significa que lacurva envolvente en cada uno de sus puntos tiene la misma pendiente y′ que las curvas integrales, y por lotanto, cada envolvente satisface la ecuacion diferencial y′ = f(x, y).
Podemos decir entonces, que una envolvente de una familia de soluciones de y′ = f(x, y) es tambienuna solucion de la ecuacion diferencial. La inversa de esta afirmacion no tiene porque ser verdadera, esdecir, una solucion particular, que no sea obtenida a partir de la familia 1-parametrica de soluciones, no esnecesariamente una envolvente.
Por ejemplo, utilizando el metodo de las envolventes podemos encontrar una solucion particular de
y′ = (1− y2)12 ,
que no sea obtenible de la familia de soluciones y = cos(x+ C).Como vimos en el ejemplo anterior, y = 1 y y = −1 son envolventes de y = cos(x + C). Por lo tanto,
tenemos dos soluciones particulares a la ecuacion diferencial: y = 1 y y = −1.
6.1.16. Ejemplos
1. Consideremos la siguiente ecuacion diferencial no lineal
y′ = −√
1− x2
√5− y
⇔√
1− x2 dx+√
5− y dy = 0 ⇒∫
dx√
1− x2 +
∫dy√
5− y = 0
con lo cual, al integrar resulta que
1
2x√
1− x2 +1
2arcsen(x) +
2
3(5− y)3/2 = C para − 1 ≤ x ≤ 1 ∧ y > −5
Notese que el arcsen(x) es multivaluada por lo tanto debemos restringir el intervalo a su valor principal−π2 < x < π
2 .
2.
y′ = −2x+ 3y − 1
4x+ 6y + 2⇒ λ = 2 , z = 2x+ 3y − 1 ⇒ dz = 2dx+ 3dy ⇒ y′ =
1
3(z′ − 2)
con lo cual
1
3(z′ − 2) = − z
2z + 4⇒ dz
dx=
z + 8
2z + 4⇒∫
2z + 4
z + 8dz =
∫dx ⇒ 2z − 12 ln |z + 8| = x+ C ,
por lo tanto, la solucion sera:
4x+ 6y − 2− 12 ln |2x+ 3y + 7| = x+ C ⇒ x+ 2y − 4 ln |2x+ 3y + 7| = C ,
con 2x+ 3y+ 7 6= 0. Podemos comprobar que 2x+ 3y+ 7 = 0 es una solucion particular de la ecuaciondiferencial.
3. Consideremos la siguiente ecuacion diferencial
(x+ y)y′ − 2x+ y − 1 = 0
204

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
la cual corresponde al caso en los cuales los coeficientes de la ecuacion Q(x, y) y P (x, y) son funcionesinhomogeneas. Tal y como hemos visto un cambio de variable lo convierte en homogeneo. De nuevo,hay que tener cuidado con el signo + de: Pdx+Qdy = 0.
(2x− y + 1) dx−(x+ y) dy = 0 ⇒
u = 2x− y + 1 du = 2dx− dy dx = 13 (du− dv)
⇒ ⇒v = −(x+ y) dv = −dx− dy dy = − 1
3 (du+ 2dv)
ası nuestra ecuacion diferencial tendra la forma de una ecuacion homogenea
(u+ v)du− (u− 2v)dv = 0 ,
y ahora haciendo el cambio de variables u = tv con lo cual du = tdv + vdt
(tv + v)(tdv + vdt)− (tv − 2v)dv = 0 ⇒ (t2 + 2)dv + v(t+ 1)dt = 0 ⇒∫
dv
v+
∫t+ 1
t2 + 2dt = 0
e integrando tendremos que
ln |v|+ 1
2ln |t2 + 2|+
√2
2arctan
(√2
2t
)= C ⇒ ln |v2(t2 + 2)|+
√2 arctan
(√2
2t
)= C ,
para v 6= 0, y ahora
t =u
v=
2x− y + 1
−(x+ y)⇒ ln
∣∣(x+ y)2 + 2(2x− y + 1)2∣∣+√
2 arctan
∣∣∣∣∣√
2
2
2x− y + 1
−(x+ y)
∣∣∣∣∣ = C ,
para x+ y 6= 0. La Figura 6.7 ilustra esta familia de soluciones.
Figura 6.5: Solucion grafica para la ecuacion diferencial (x + y)y′ − 2x + y − 1 = 0. Las curvas de diferentes colores
indican soluciones particulares: y(0) = 7; y(0) = 5; y(0) = 2; y(0) = −7; y(0) = −5; y(0) = −2.
205

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
4. Sea la siguiente ecuacion, y verifiquemos si es exacta o no(x2y + y3
)y′ + x3 + y2x = 0 .
Por lo tanto:
(x3 + y2x
)dx+
(x2y + y3
)dy ⇒
P (x, y) = x3 + y2x
Q(x, y) = x2y + y3
⇒ ∂Q(x, y)
∂x=∂P (x, y)
∂y= 2yx
la ecuacion diferencial es exacta, y otra vez:
f(x, y) =
∫ x
x0
(u3 + y2u
)du+
∫ y
y0
(x2w + w3
)dw = C ,
= x4 + 2x2y2 + y4 = C ,
=(x2 + y2
)2= C .
5. Dada la siguiente ecuacion diferencial (1 + x2
)y′ + xy = 0 .
Esta ecuacion no es exacta, ya que:
(xy)dx+(1 + x2
)dy = 0 ⇒
P (x, y) = xy
Q(x, y) = 1 + x2⇒ ∂Q
∂x= 2x 6= ∂P
∂y= x .
Podemos ver que el arreglo:
1
P (x, y)
[∂Q(x, y)
∂x− ∂P (x, y)
∂y
]=
2x− xxy
=1
y= f(y) ,
entonces, el factor integrante es
µ(y) = e∫ dy
y = eln(y) = y .
Por lo tanto, la ecuacion es exacta:
(xy2)dx+(y + yx2
)dy = 0 ⇒
P (x, y) = xy2
Q(x, y) = y + yx2⇒ ∂Q
∂x=∂P
∂y= 2xy .
Queda como ejercicio resolver esta ecuacion diferencial.
6. Otros metodos
Muchas veces, la solucion de una ecuacion diferencial se puede obtener utilizando mas de un metodo.Si fallan los metodos vistos anteriormente entonces podemos utilizar un poco de ingenio matematico.Veamos los siguientes ejemplos
a) Resolvamos la ecuacionxy′ = y − y2 − x2 ,
206

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
la ecuacion no es del tipo con coeficientes homogeneos
(y − y2 − x2
)dx− xdy = 0 ⇒
P (x, y) = y − y2 − x2
Q(x, y) = −x⇒ ∂Q
∂x= −1 6= 1− 2y =
∂P
∂y.
pero podemos hacer lo siguiente:
ydx− xdy −(y2 + x2
)dx = 0
ydx− xdy
x2=
[y2
x2+ 1
]dx , x 6= 0
−d[yx
]=
[(yx
)2
+ 1
]dx
−d[yx
](yx
)2+ 1
= dx
integrando:
−∫
d[yx
](yx
)2+ 1
=
∫dx ⇒ − arc tg
(yx
)= x+ C ⇒ y(x) = −x tan(x+ c) , x 6= 0 .
b) Resolver
y′ = −2x+ 2(x2 + y − 1
) 23 .
Podemos hacer la siguiente sustitucion:
z = x2 + y − 1 ⇒ dy
dx=
dz
dx− 2x
Por lo tantodz
dx− 2x = −2x+ 2z
23 ⇒ dz
dx= 2z
23
Nos queda entonces una ecuacion separable
dz
z23
= 2dx ⇒∫z−
23 dz =
∫2dx ⇒ 3z
13 = 2x+ C , z 6= 0
regresando a la variable original
3(x2 + y − 1
) 13 = 2x+ C ⇒ 27
(x2 + y − 1
)= (2x+ C)
3, x2 + y − 1 6= 0
para finalizar, despejamos lo que sera nuestra solucion
y(x) = 1− x2 +1
27(2x+ C)
3.
Es bueno acotar y queda como ejercicio, demostrar que y(x) = 1− x2 tambien es una solucion.
207

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
c) Resolver2 cos(y)y′ + sen(y) = x2 csc(y) , y 6= 0 .
Podemos verificar que los metodos anteriores no funcionan, pero si multiplicamos por sen(y):
2 cos(y)sen(y)y′ + sen2(y) = x2 csc(y)sen(y)
d
dx
[sen2(y)
]+ sen2(y) = x2
Esta es una ecuacion lineal para sen2(y), si hacemos z = sen2(y) tenemos:
dz
dx+ z = x2
donde el facil ver que el factor integrador es µ(x) = ex. Por lo tanto:
z =1
ex
∫x2exdx+
C
ex=
1
ex(2− 2x+ x2
)ex +
C
ex= 2− 2x+ x2 + Ce−x ,
la solucion es entonces:
y(x) = arcsen[±√
2− 2x+ x2 + Ce−x], y 6= 0 .
7. Consideremos la ecuacion
y = xy′ +a
2
1
y′, donde a es una constante.
Como resolvimos con anterioridad y = G(x, y′). Entonces: y′ = z
y = xz + a2z
⇒dy = z dx
dy = z dx+(x− a
2z2
)dz
⇒ z dx = z dx+(x− a
2z2
)dz
con un poco de algebra se tiene
z = z +(x− a
2z2
) dz
dx
0 =(x− a
2z2
) dz
dx⇒ x =
a
2z2⇒ z = ±
√a
2x
por lo tanto, un conjunto de la soluciones particulares son
y(x) = ±x√
a
2x± a
2
√2x
a.
Y la familia 1-parametrica de soluciones sera: y(x) = xC +a
2C.
8. Encontrar las envolventes dey2 = 2xC − C2 .
208

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
Como vimos anteriormente,
f(x, y, C) = y2 − 2xC + C2 ⇒ ∂c[y2 − 2xC + C2] = −2x+ 2C = 0 ⇒ x = C∣∣∣∣∣∣
−2C 2y
−2 0
∣∣∣∣∣∣ = 4y 6= 0 , ∂ccf = 2 6= 0 ,
Aquı, y 6= 0. La envolvente tiene entonces su forma parametrica dada por y2 − 2xC + C2 = 0
x = C⇒ y2 − x2 = 0 ⇒
y = x
y = −x
9. Encontrar una solucion particular de
9(y′)2(2− y2) = 4(3− y) ,
no obtenible de su solucion (x− C)2 = 3y2 − y3.
Veamos si esta familia de soluciones tiene envolventes
f(x, y, C) = (x− C)2 − 3y2 + y3 ⇒ ∂c[(x− C)2 − 3y2 + y3] = −2(x− C) = 0 ⇒ x = C
Por otro lado, ∣∣∣∣∣∣2(x− C) −6y + 3y2
2 0
∣∣∣∣∣∣ = −6y(2− y) 6= 0 ∂ccf = 2 6= 0 ,
Se tiene que y 6= 0 y y 6= 2. La envolvente tiene entonces su forma parametrica dada por (x− C)2 − 3y2 + y3 = 0
x = C⇒ −y2(3− y) = 0 ⇒
y = 0
y = 3
La solucion y = 0, no se puede considerar ya que el determinante anterior tiene que ser diferente decero. Por lo tanto, una solucion particular es la recta y = 3.
10. Resuelva la ecuacion de Clairauty = xy′ + (y′)2
y estudie sus posibles envolventes.
Esta es una ecuacion del tipo y = G(x, y′). Por lo tanto y′ = z
y = xz + z2⇒
dy = z dx
dy = z dx+ (x+ 2z) dz⇒ z dx = z dx+ (x+ 2z) dz
es decir:
0 =(xz
+ 2) dz
dx⇒ x = −2z
209

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
Esto nos permite encontrar una solucion particular de la ecuacion diferencial, ya que
z = −x2⇒ y = xz + z2 ⇒ y(x) = −x
2
4.
Si consideramos y(x) = xC +C2, que es la familia de soluciones de la ecuacion diferencial, entonces alhacer un estudio sobre las envolventes encontramos lo siguiente
f(x, y, C) = y − xC − C2 ⇒ ∂c[y − xC − C2] = −x− 2C = 0 ⇒ x = −2C
Por otro lado, ∣∣∣∣∣∣−C 1
−1 0
∣∣∣∣∣∣ = 1 6= 0 ∂ccf = −2 6= 0 ,
La envolvente tiene entonces su forma parametrica dada por y − xC − C2 = 0
x = −2C⇒ y +
x2
4= 0 ⇒ y(x) = −x
2
4.
6.1.17. Practicando con Maxima
6.1.18. Ejercicios
1. Pruebe que
y′√
1− x2 = x√
1− y ,
tiene como solucion: √1− x2 − 2
√1− y = C para − 1 < x < 1 ∧ y < 1 .
Es y = 1 una solucion particular?
2. Utilice el metodo de las isoclinas para estudiar las soluciones de las siguientes ecuaciones:
(a) y′ = x+ y , |x| < 5 . (b) y′ =√x2 + y2 , |x| < 1 . (c) y′ = 1 + xy , |x| < 5 .
3. Muestre que:
a) f(x, y) =√y sen
(xy
)es homogenea de grado 1
2 .
b) f(x, y) = ey/x + tan(xy
)es homogenea de grado 0.
4. Resuelva la ecuacion diferencial estudiando el hecho de que sea exacta o no(2xysen2(x)
)y′ + x3 + xy2sen(2x) + y2sen2(x) = 0 .
5. Resuelva la ecuacion
xy′ + 3y =sen(x)
x2, con x 6= 0 , y y
(π2
)= 1 .
210

Borra
dor Pre
limin
ar
6.1. SOLUCIONES ANALITICAS
6. Demuestre que si µ = µ(z) donde z = xy, entonces el factor integrante viene dado por
µ(z) = e∫
dz f(z) ,
donde:
f(z) =
∂P (x, y)
∂y− ∂Q(x, y)
∂x
yQ(x, y)− xP (x, y)
Con este resultado resuelva la ecuacion:(x3 + x2y + x
)y′ + y3 + xy2 + y = 0 .
7. Demuestre que si µ = µ(z) donde z = x/y, entonces el factor integrante viene dado por
µ(z) = e∫
dz f(z) ,
donde:
f(z) =
y2
[∂P (x, y)
∂y− ∂Q(x, y)
∂x
]yQ(x, y) + xP (x, y)
Resuelva la ecuacion:xy′ = 3y .
8. Demuestre que si µ = µ(z) donde z = y/x, entonces el factor integrante viene dado por
µ(z) = e∫
dz f(z) ,
donde:
f(z) =
x2
[∂Q(x, y)
∂x− ∂P (x, y)
∂y
]yQ(x, y) + xP (x, y)
Resuelva la ecuacion:3xy′ = y .
9. Resuelva la ecuacionxy′ + y − y2 lnx = 0 .
10. Resuelva la siguiente ecuacion de Riccati
y′ = x3 +2
xy − 1
xy2 , y1(x) = −x2 .
11. Encuentre, utilizando el metodo de las envolventes, soluciones particulares no obtenibles de la familiade soluciones.
a)
y′ =√y − x , y = x+
1
4(x+ c)2 , x ≤ y ≤ x+ 1 .
b)y′ = 3y2/3 , y = (x− c)3 .
211

Borra
dor Pre
limin
ar
6.2. SOLUCIONES NUMERICAS
c)
y = xy′ + 3√
1 + (y′)2 , y = Cx+ 3√
1 + C2 , y > 0 , x2 < 9 .
d)y = xy′ + ln y′ , y = Cx+ lnC .
e)y = xy′ − (y′)2/3 .
6.2. Soluciones numericas
En muchos problemas practicos que involucran ecuaciones diferenciales no resulta posible expresar lasolucion en terminos de funciones elementales y es necesario recurrir a metodos numericos. Por una solucionnumerica entenderemos como aquellas soluciones que vendran estipuladas como tablas de valores dondepara cada valor de xk le corresponde algun valor de la funcion yk(xk). Mas adelante encontraremos algunassoluciones que tampoco vienen expresadas en terminos de funciones elementales, como es el caso de la soluciony = J0(x), las funciones de Bessel.
6.2.1. Las ideas generales
Dada una ecuacion diferencial de segundo orden de la forma
x(t) = F [x(t), x(t), t]
siempre se puede convertir en un sistema de dos ecuaciones lineales de primer orden, al extender el espaciode variables de la forma
x ≡ p(t)
x ≡ q(t)
⇒ x(t) = F [x(t), x(t), t]⇔
q = p(t)
p = F (p(t), q(t), t)
este sistema puede ser rearreglado en forma vectorial
d
dt
q(t)
p(t)
=
p(t)
F [p(t), q(t), t]
⇔ dQ
dt= F (Q(t), t)
Ası dado un conjunto de potenciales elasticos y las fuerzas que de ellos derivan,
V (x) =
p = 1 → kx
p = 2 → 12kx
2
p = 3 → 13kx
3
......1pk|x|
p
⇒ Fk(x) = −dV
dx=
−k x|x|
−kx
−kx2
...−k|x|p−1 x
|x|
el sistema dinamico correspondiente a la ecuacion de Newton sera
dQ
dt= F (Q(t), t)⇒ d
dt
x(t)
p(t)
=
p(t)
1m [Fext (x(t), t)]− k|x(t)|p−1 x(t)
|x(t)|
212

Borra
dor Pre
limin
ar
6.2. SOLUCIONES NUMERICAS
6.2.2. Metodos y su clasificacion
Dada una ecuacion diferencial de primer orden,
y′(x) = f(y(x), x),
donde y(x) es probablemente una funcion continua de la variable continua x. Tengamos claro que una solucionnumerica de esta ecuacion es en realidad una aproximacion a la funcion y(x).
Al resolver numericamente, lo que se obtiene es una funcion yk = y(xk) que resulta ser el valor de lafuncion obtenida con el metodo. La funcion es evaluada para un conjunto de puntos discretos xk = x0 + kh,con k = 0, 1, 2, . . . y x0 < x1 < x2 · · · . A h se le denomina la longitud del paso.
Diremos que un metodo es de paso unico si la determinacion de yk+1 solo involucra un unico valor de yky multiple paso si para calcularlo se utilizan varios valores yk, yk−1, · · · , yk−p. Por otra parte se denominaun metodo explıcito si para determinar yk+1 se utilizan valores anteriores yk, yk−1, · · · , yk−p y implıcitosi se utilizan una funcion del mismo valor yk+1.
Asıyk+1 = yk−1 + 2h f (xk, yk)
representa un metodo explıcito de paso unico mientras que
yk+1 = yk +h
2[f (xk, yk) + f (xk+1, yk+1)]
sera implıcito de multiples pasos.
El rebusque de Taylor
Tal y como hemos dicho arriba, dada una ecuacion diferencial, su solucion a traves de un metodo de pasounico puede ser escrita como
y′(x) = f(y(x), x)⇒ yk+1 = yk + ϕ (xk, yk, h) con h = xi+1 − xi;
Lo primero que se puede hacer es expandir por Taylor alrededor del punto x = xk
y(x) = y(xk) + (x− xk) y′(xk) +1
2!(x− xk)
2y′′(xk) + · · ·+ 1
n!(x− xk)
ny(n)(xk) + · · ·
e identificamos
y(xk)→ yky′(x) = f(y(x), x)
y′(xk)→ f(yk, xk)
y′′(xk)→ f ′(yk, xk) =∂f
∂x
∣∣∣∣x=xxy=yk
+∂f
∂y
∣∣∣∣x=xxy=yk
y′k
y′′′(xk)→ f ′′(yk, xk) = ∂xf′ + ∂yf
′ y′k = ∂xxf + (∂xyf) y′k + [∂yxf + (∂yyf) y′k] y′k + ∂yf y′′k
......
......
Por lo que podemos reconstruir la serie de Taylor hasta el orden que podamos o requiramos
yn+1 = yn + h f(yk, xk) +1
2!h2 f ′(yk, xk) +
1
3!h3 f ′′(yk, xk) + · · ·+ 1
n!hn f (n−1)(yk, xk) + · · ·
213

Borra
dor Pre
limin
ar
6.2. SOLUCIONES NUMERICAS
quedando acotado el error por
εred =1
(n+ 1)!hn+1 f (n)(y(ξ), x(ξ)) .
Podemos considerar el siguiente ejemplo donde tenemos siguiente ecuacion diferencial cuya solucion exactaconocemos
y′ = x2 + y ⇒ y(x) = 3ex − x2 − 2x− 2
si tenemos como condicion inicial y(0) = 1, entonces
y′ = x2 + y , y′′ = 2x+ y′ , y′′′ = 2 + y′′ , y(4) = y′′′ , . . .
al tomar en cuenta la condicion inicial
y′(0) = 1 , y′′(0) = 1 , y′′′(0) = 3 , y(4)(0) = 3 , . . .
por lo tanto
y(h) = y(0) + hy′(0) +1
2!h2y′′(0) +
1
3!h3y′′′(0) +
1
4!h4y(4)(0) + · · ·
= 1 + h+1
2h2 +
1
2h3 +
1
8h4 + · · ·
Algunos valores se muestran a continuacion, tomando terminos de la serie hasta orden 4.
h y(h) y(x)
0.1 1.1055125 1.10551280.2 1.2242000 1.22420830.3 1.3595125 1.35957640.4 1.5152000 1.5154741
podemos ver que a medida que nos alejemos del origen el metodo no es tan bueno.
6.2.3. La idea de la integracion y los metodos
La idea de integrar una ecuacion diferencial ordinaria puede ilustrarse, formalmente de la siguiente forma
y′(x) = f(y(x), x)⇒ yk+1 = yk +
∫ xk+1
xk
dξ f (ξ, y(ξ)) ,
entonces el metodo se centra en como se aproxima la funcion dentro de la integral
Euler Se aproxima la funcion con en el punto anteriorf (xk, yk) ⇒ yk+1 = yk + h f (xk, yk)Euler Mejorado o Heuns Se aproxima la funcion mediante un promedio en los extremos12 [f (xk, yk) + f (xk+1, yk+1)] ⇒ yk+1 = yk + h
2 [f (xk, yk) + f (xk+1, yk+1)]
⇒ yk+1 = yk + h2 [f (xk, yk) + f (xk+1, yk + h f (xk, yk))]
Con h = xi+1−xi el paso de integracion. Notese ademas que hemos utilizado Euler otra vez para expresaryk+1 = yk+1(yk, xk).
214

Borra
dor Pre
limin
ar
6.2. SOLUCIONES NUMERICAS
El metodo de Euler constituye una expansion por Taylor hasta primer orden por lo que el error esclaramente de segundo orden por cuanto si comparamos con la expansion en series de Taylor correspondientetendremos
yk+1 = yk + hd y
dx
∣∣∣∣x=xk
+h2
2!
d2y
dx2
∣∣∣∣x=xk
+ · · ·
‖εtot‖ ∝h2
2!
d2y
dx2
∣∣∣∣x=xk
6.2.4. El metodo de Euler y el problema de valores iniciales
Este metodo si bien no se utiliza en la practica en su forma estandar para ecuaciones diferencialesordinarias, si ilustra el proceso de discretizacion de una ecuacion diferencial y su solucion mediante metodosnumericos.
Para resolver la ecuacion de un oscilador armonico libre que parte del reposo, i.e.
d2φ(t)
dt2+ ω2
0φ(t) = 0 con: ω20 =
k
m; φ (t0) = 1; y
dφ(t)
dt
∣∣∣∣t=t0
= 0
en la cual φ(t) representa la posicion de un cuerpo de masa m unido a un resorte de constante elastica k.Discretizando mediante diferencia centrada
h = ti+1 − ti;d2φ(t)
dt2≈ 1
h2[φ(ti+1)− 2φ(ti) + φ(ti−1)] ≡ 1
h2[φi+1 − 2φi + φi−1]
con lo cual la ecuacion del oscilador libre queda como
d2φ(t)
dt2+ ω2
0φ(t) = 0 ⇒ φi+1 −(2− h2ω2
0
)φi + φi−1 = 0
esta ultima ecuacion es la version en diferencias finitas de la ecuacion diferencial y es claro que se convierteen una ecuacion algebraica.
Finalmente, los dos valores iniciales para la iteracion φ0 y φ1 surgen de las condiciones iniciales
φ0 ≡ φ (t = t0) = 1
dφ(t)
dt
∣∣∣∣t=t0
= 0 ⇒ φ1 ≈ φ0 .
6.2.5. Los metodos de Runge-Kutta
Es el conjunto de metodos mas populares y de mayor uso. La idea del metodo de Runge-Kutta es producirresultados equivalentes a desarrollos en Taylor de orden superior a Euler en metodos de un unico paso porlo tanto
y′(x) = f(y(x), x)⇒ yk+1 = yk +
∫ xk+1
xk
dξ f (ξ, y(ξ))
y se aproxima la funcion con un promedio ponderado.
f (ξ, y(ξ)) ≈ [α f (yk, xk) + β f (yk + δ f (yk, xk)hk, xk + γ hk)] con hk = xk+1 − xk
donde α, β, γ y δ son los pesos estadısticos a ser determinados. Por lo tanto
yk+1 = yk + [α f (yk, xk) + β f (yk + δ f (yk, xk)hk, xk + γ hk)]hk
215

Borra
dor Pre
limin
ar
6.2. SOLUCIONES NUMERICAS
Expandiendo por Taylor de dos variables
g (x+ λ, y + µ) = g (x, y) + [λ ∂xg + µ ∂yg] +1
2!
[λ2 ∂2
xg + 2λµ ∂xyg + µ2 ∂2yg]
+ · · ·
tendremos
yk+1 = yk + [α+ β] fk hk + β [γ ∂xfk + δ fk ∂yfk]h2k+
+ β
[γ2
2∂2xfk + 2γδ fk ∂xyfk +
δ2
2f2k ∂
2yfk
]h3k + · · ·
con fk = f (yk, xk) y como se ve claramente, queda libertad para escoger
Euler Mejorado o Heuns α = β = 12 ; γ = δ = 1
yk+1 = yk + fk hk + 12 [∂xfk + fk ∂yfk]h2
k
Euler Modificado α = 0; β = 1; γ = δ = 12
yk+1 = yk + fk hk +[
12∂xfk + 1
2 fk ∂yfk]h2k
Runge-Kutta de cuarto orden aproxima la funcion f (ξ, y(ξ)) en cuatro puntos intermedios en el intervaloxk < x < xk+1 por lo cual
yk+1 = yk + [α κ1 + β κ2 + γ κ3 + δ κ4]hk
podemos plantearnos varias formas de hacerlo
yk+1 = yk +hk6
[κ1 + 2κ2 + 2κ3 + κ4]
donde
κ1 = f (xk, yk)
κ2 = f
(xk +
1
2hk, yk +
1
2κ1
)κ3 = f
(xk +
1
2hk, yk +
1
2κ2
)κ4 = f (xk + hk, yk + κ3)
o tambien
yk+1 = yk +hk8
[κ1 + 3κ2 + 3κ3 + κ4]
donde
κ1 = f (xk, yk)
κ2 = f
(xk +
1
3hk, yk +
1
3κ1
)κ3 = f
(xk +
1
3hk, yk +
1
3κ2
)κ4 = f (xk + hk, yk + κ3)
216

Borra
dor Pre
limin
ar
6.2. SOLUCIONES NUMERICAS
Mas aun el metodo de Fehlberg de 4/5 orden se puede escribir como
yk+1 = yk + hk [C1κ1 + C2κ2 + C3κ3 + C4κ4 + C5κ5 + C6κ6] +O(h6)
κ1 = f (xk, yk)
κ2 = f (xk + a2hk, yk + b21κ1)
κ3 = f (xk + a3hk, yk + b31κ1 + b32κ2)
κ4 = f (xk + a4hk, yk + b41κ1 + b42κ2 + b43κ3)
...
κ6 = f (xk + a6hk, yk + b61κ1 + b62κ2 + b63κ3 + b64κ4 + b65κ5)
la cual puede ser redefinida y truncada para obtener
yk+1 = yk + hk
[C1κ1 + C2κ2 + C3κ3 + C4κ4 + C5κ5
]+O(h5)
Volvamos al mismo ejemplo que vimos anteriormente
y′ = x2 + y ⇒ y(x) = 3ex − x2 − 2x− 2
con la condicion inicial y(0) = 1.Tenemos entonces que f(x, y) = x2 + y. Los valores iniciales son x0 = 0 y y0 = y(x0) = 1. Si tomamos
h = 0,1, entonces al considerar la ecuacion de Runge-Kutta de cuarto orden
y(x0 + h) = y(0,1) = y(0) +1
6[κ1 + 2κ2 + 2κ3 + κ4]
donde
κ1 = (0,1)f (xk, yk) = (0,1)f (0, 1) = 0,1
κ2 = (0,1)f
(xk +
1
2hk, yk +
1
2κ1
)= (0,1)f (0,05, 1,05) = 0,10525
κ3 = (0,1)f
(xk +
1
2hk, yk +
1
2κ2
)= (0,1)f (0,05, 1,052625) = 0,1055125
κ4 = (0,1)f (xk + hk, yk + κ3) = (0,1)f (0,1, 1,1055125) = 0,11155125
por lo tanto el valor aproximado para y(0,1) es:
y(0,1) = y(0) +1
6[κ1 + 2κ2 + 2κ3 + κ4] = 1,1055127
De manera similar podemos calcular y(0,2).
y(x1 + h) = y(0,2) = y(0,1) +1
6[κ1 + 2κ2 + 2κ3 + κ4]
pero ahora: x1 = 0,1 y y1 = y(x1) = 1,1055127
κ1 = (0,1)f (xk, yk) = (0,1)f (0,1, 1,1055127) = 0,11155127
κ2 = (0,1)f
(xk +
1
2hk, yk +
1
2κ1
)= (0,1)f (0,15, 1,1612883) = 0,1183788
κ3 = (0,1)f
(xk +
1
2hk, yk +
1
2κ2
)= (0,1)f (0,15, 1,1647021) = 0,1187202
κ4 = (0,1)f (xk + hk, yk + κ3) = (0,1)f (0,2, 1,2242329) = 0,1264233
217

Borra
dor Pre
limin
ar
6.2. SOLUCIONES NUMERICAS
tenemos entonces quey(0,2) = 1,2242081
El resto de los valores se pueden apreciar en la siguiente tabla y donde ademas podemos hacer algunascomparaciones con lo visto anteriormente
h y(h)(Taylor) y(h) (R-K) y(x)(Exacto)
0.1 1.1055125 1.1055127 1.10551280.2 1.2242000 1.2242081 1.22420830.3 1.3595125 1.3595761 1.35957640.4 1.5152000 1.5154736 1.5154741
6.2.6. Metodos multipaso
Los metodos multipaso se basan en encontrar el valor yn+k como una funcion de k de valores precedentes:yn+k−1, yn+k−2, yn+k−3, · · · yn . Para k = 1, retomamos los metodos de paso unico del tipo Euler o Runge-Kutta. Sera explıcito (abierto) si el valor yn+k puede ser calculado directamente o implıcito (abierto) si laformula contiene el valor yn+k deseado.
Otra vez la idea esta en aproximar el argumento de la integracion formal
y′(x) = f(y(x), x)⇒ yi+1 = yi +
∫ xi+1
xi−k
dξ f (ξ, y(ξ))
notese en este caso que el punto i+ 1 recibe la contribucion de k puntos anteriores. El integrando f (ξ, y(ξ))lo aproximaremos con un polinomio de interpolacion de Newton de orden n. Tal que
f (ξ, y(ξ))→ f (ξ) = pn (ξ) +Rn (ξ)
con pn (ξ) el polinomio de interpolacion y Rn (ξ) el residuo. Donde i
pn (x) = f [xn] + (x− xn) f [xn, xn−1] + (x− xn) (x− xn−1) f [xn, xn−1, xn−2] + · · ·+ (x− xn) (x− xn−1) (x− xn−2) · · · (x− x1) f [xn, xn−1, xn−2, xn−3, · · ·x0]
Rn (x) = (x− xn) (x− xn−1) (x− xn−2) · · · (x− x0)f (n+1)(ζ)
(n+ 1)!con x0 < ζ < xn
haciendo pn (x) ≡ f (xn + αh) con α cero o negativo de tal modo que en terminos del operador diferenciasatrasada ∇f(x) = f(x)− f(x− h) siendo h el incremento
f (xn + αh) = fn + α∇fn +α (α+ 1)
2!∇2fn +
α (α+ 1) (α+ 2)
3!∇3fn+
+α (α+ 1) (α+ 2) · · · (α+ r − 1)
r!∇rfn
218

Borra
dor Pre
limin
ar
6.2. SOLUCIONES NUMERICAS
donde hemos denotado fn ≡ f (xn, y(xn)), ∇mfn ≡ ∇mf |x=xn, y α = (x− xi) /h Por lo tanto
yi+1 = yi +
∫ xi+1
xi−k
dξ f (ξ, y(ξ))
= yi + h
∫ 1
−kdα f (xn + αh)
yi+1 = yi + h
[αfi +
α2
2∇fi + α2
(α
3+
1
2
)∇2fi
2!+ α2
(α2
4+ α+ 1
)∇3fi
3!+
+α2
(α3
5+
3α2
2+
11α
3+ 3
)∇4fi
4!+ · · ·
]1
−k
por razones de conveniencia que son evidentes al hacer el desarrollo, se toman las formulas para k = r y kimpar y obtendremos
k = 0r = 3
}⇒
yi+1 = yi + h
[fi + 1
2∇fi + 512∇
2fi + 38∇
3fi]
R = 251720h
5f (4) (ζ)
k = 1r = 1
}⇒
yi+1 = yi + h [2fi + 0∇fi]
R = 13h
3f (2) (ζ)
k = 3r = 3
}⇒
yi+1 = yi + h
[4fi − 4∇fi + 3
8∇2fi + 0∇3fi
]R = 14
45h5f (4) (ζ)
k = 5r = 5
}⇒
yi+1 = yi + h
[6fi − 12∇fi + 15∇2fi − 9∇3fi + 33
10∇4fi]
R = 41140h
7f (6) (ζ)
y al expresar las diferencias atrasadas las formulas explıcitas (abierta) quedan expresadas como
k = 0r = 3
}yi+1 = yi + h
24 [55fi − 59fi−1 + 37fi−2 − 9fi−3] R ∼ O(h5)
k = 1r = 1
}yi+1 = yi + 2hfi R ∼ O
(h3)
k = 3r = 3
}yi+1 = yi + 4h
3 [2fi − fi−1 + 2fi−2] R ∼ O(h5)
k = 5r = 5
}yi+1 = yi + 3h
10 [11fi − 14fi−1 + 26fi−2 − 14fi−3 + 11fi−4] R ∼ O(h7)
Siguiendo el mis procedimiento se pueden escribir las formulas implıcitas (cerradas) para las mismas“curiosas” situaciones. Para este caso la conveniencia se obtienes para k impar y r = k + 2
k = 0r = 3
}⇒
yi+1 = yi + h
[fi+1 − 1
2∇fi+1 − 112∇
2fi+1 − 124∇
3fi+1
]R = −19
720 h5f (4) (ζ)
k = 1r = 3
}⇒
yi+1 = yi−1 + h
[2fi+1 − 2∇fi − 1
3∇2fi+1 − 0∇3fi+1
]R = −1
90 h5f (4) (ζ)
k = 3r = 5
}⇒
yi+1 = yi−3 + h
[4fi+1 − 8∇fi − 20
3 ∇2fi+1 − 8
3∇3fi+1 + 14
45∇4fi+1
]R = −8
945h5f (4) (ζ)
219

Borra
dor Pre
limin
ar
6.2. SOLUCIONES NUMERICAS
desarrollando las diferencias atrasadas, tendremos
k = 0r = 3
}yi+1 = yi + h
24 [9fi+1 + 19fi−1 − 5fi−1 + 9fi−2] R ∼ O(h5)
k = 1r = 3
}yi+1 = yi−1 + h
3 [fi+1 + fi + fi−1] R ∼ O(h5)
k = 3r = 5
}yi+1 = yi−3 + 2h
45 [7fi+1 + 32fi + 12fi−1 + 32fi−2 + 7fi−3] R ∼ O(h7)
Se debe puntualizar lo siguiente respecto a las formulas explıcitas e implıcitas de los metodos multipasoantes mencionados
Los metodos multipasos, normalmente, requieren menos evaluaciones de las funciones que los metodosmonopaso para un mismo nivel de precision.
Los metodos multipaso requieren de un metodo monopaso que le permita determinar los yn+k−1, yn+k−2, yn+k−3, · · · , ynpuntos iniciales.
Las formulas explıcitas son, normalmente, menos precisas que las implıcitas. La razon se fundamentaen que, mientras las explıcitas extrapolan la solucion al punto yi+1, las implıcitas la interpolan, porcuanto la toman en cuenta en el momento de calcularla.
Las formulas explıcitas e implıcitas deben ser consideradas como complementarias, por cuanto lasexplıcitas pueden predecir el valor de yi+1 necesario para la fi+1 = f(xi+1, yi+1) del calculo de y∗i+1 enla formula implıcita.Existen varias combinaciones predictor-corrector, entre ellas mencionamos:Milne de cuarto orden
• Predictor
yi+1 = yi−3 +4h
3[2fi − fi−1 + 2fi−2]
• Corrector
yi+1 = yi−1 +h
3[fi+1 − 4fi + fi−1]
Milne de sexto orden
• Predictor
yi+1 = yi−5 +3h
10[11fi − 14fi−1 + 26fi−2 − 14fi−3 + 11fi−4]
• Corrector
yi+1 = yi−3 +2h
45[7fi+1 + 32fi + 12fi−1 + 32fi−2 + 7fi−3]
Adams Modificado o Adams Moulton
• Predictor
yi+1 = yi +h
24[55fi − 59fi−1 + 37fi−2 − 9fi−3]
• Corrector
yi+1 = yi +h
24[9fi+1 + 19fi − 5fi−1 + fi−2]
220

Borra
dor Pre
limin
ar
6.2. SOLUCIONES NUMERICAS
El metodo de extrapolacion multipaso mas exitoso (conjuntamente con los metodos de paso unico deltipo Runge-Kutta) es el de extrapolacion racional de Bulirsch-Stoer en el cual se define un paso superiorde H y una serie de subpaso hη = H/η con el aumento del numero de subpasos, en algun momento siguiendoalgun criterio de convergencia se hace una extrapolacion (racional) que representa el lımite η →∞.
El metodo de Bulirsch-Stoer tiene una estrategia diferente al los anteriores y posee, como motor deaproximacion el metodo del punto medio modificado o salto de rana (leap frog). Este esquema se utiliza confrecuencia en discretizaciones de ecuaciones diferenciales en derivadas parciales y se basa en aproximar laderivada por el valor el promedio en los dos extremos:
y′(x) = f(y(x), x)⇒ y′(xn) = f(y(xn), xn) =y(xn)− y(n−1)
2h
por lo tanto
z0 ≡ y(x)
z1 = z0 + hf(x, z0)
...
zn+1 = zn−1 − 2hf(x+ nh, zn)
para finalmente calcular
y(x+H) ≈ yn ≡1
2[zn + zn−1 + hf (x+H, zn)]
Notese que si reacomodamos
y(x+H) ≈4yn − yn/2
3
obtendremos un metodo de cuarto orden que requiere menos evaluaciones de f(y(xn), xn) por paso h
6.2.7. Control del paso
En General para metodos de 4to orden. Tal y como se menciono en el caso de la integracionnumerica, el primer criterio que surge es dividir el paso h en la mitad, calcular todo de nuevo y compararlos resultados a ver si esta dentro del los lımites de tolerancia que nos hemos impuesto∥∥∥∥yh − yh/2yh
∥∥∥∥ ≡ ∆(yh, yh/2
)< εmax ⇒
εmax
∆(yh, yh/2
) ≈ (h0
ht
)5
⇒ h0 = ht
(εmax
∆(yh, yh/2
))1/5
donde hemos denotado h0 como el paso ideal. Esta relacion es general para cualquier metodo de 4 orden depaso unico, multipaso, implıcito o explıcito.
Mas aun, la practica ha indicado que
h0 =
Mht
(εmax
∆(yh,y∗h)
)0,20
≡Mht
(∆0
∆h
)0,20
∆0 ≥ ∆1
Mht
(εmax
∆(yh,y∗h)
)0,25
≡Mht
(∆0
∆h
)0,25
∆0 < ∆1
221

Borra
dor Pre
limin
ar
6.2. SOLUCIONES NUMERICAS
donde 0 <M < 1 un factor de seguridadPara metodos Runge-Kutta. es importante mencionar que se utilizan mayoritariamente metodos
hasta cuarto orden porque de mayor orden (M , por ejemplo) involucran mas de M evaluaciones (y menosM −2) de la derivada. Por ello para este tipo de metodos se descubrio que considerando el mismo numero depuntos para la evaluacion intermedia se pueden generar metodos de distinto orden, y para colmo de suerteel menor orden de esta situacion se expresa para metodos de 4 y 5 orden. En particular Runge-Kutta de 5orden se puede escribir como:
yk+1 = yk + hk [C1κ1 + C2κ2 + C3κ3 + C4κ4 + C5κ5 + C6κ6] +O(h6)
κ1 = f (xk, yk)
κ2 = f (xk + a2hk, yk + b21κ1)
κ3 = f (xk + a3hk, yk + b31κ1 + b32κ2)
κ4 = f (xk + a4hk, yk + b41κ1 + b42κ2 + b43κ3)
...
κ6 = f (xk + a6hk, yk + b61κ1 + b62κ2 + b63κ3 + b64κ4 + b65κ5)
y con los mismos puntos (¡ las mismas evaluaciones !) se puede reescribir para 4 orden como:
yk+1 = yk + hk
[C1κ1 + C2κ2 + C3κ3 + C4κ4 + C5κ5
]+O(h5)
por lo tanto el error se puede estimar
∆ (yk+1, yk+1) =
6∑i=1
(Ci − Ci
)ki
y el control del paso se utiliza exactamente igual
h0 = ht
(εmax
∆ (yh, yh)
)0,20
Para metodos multipasos y predictor corrector la situacion puede tener un refinamiento adicionalantes de proceder a modificar el paso h. El esquema serıa para un metodo predictor corrector del tipoAdams Modificado o Adams Moulton, donde el
Predictor
yi+1 = yi +h
24[55fi − 59fi−1 + 37fi−2 − 9fi−3]
Corrector
yi+1 = yi +h
24[9fi+1 + 19fi − 5fi−1 + fi−2]
se realiza una serie de iteraciones dentro de la formula de corrector, i.e.
yi+1 = yi +h
24[9f (xi+1, yi+1) + 19f (xi, yi)− 5f (xi−1, yi−1) + f (xi−2, yi−2)] .
222

Borra
dor Pre
limin
ar
6.3. ALGUNAS APLICACIONES DE ECUACIONES DIFERENCIALES DE PRIMER ORDEN
6.2.8. Ejemplos
6.2.9. Practicando con Maxima
6.2.10. Ejercicios
6.3. Algunas aplicaciones de ecuaciones diferenciales de primerorden
Modelar o describir matematicamente un fenomeno es el fin ultimo de la ciencias. Las matematicas sonel lenguaje de la fısica: ¿Como describir el chisporroteo de una llama? ¿la textura de un pintura al oleo?¿el trafico en carreteras durante horas picos? ¿el titilar de las estrellas? Describir matematicamente estassituaciones no solo no es facil, pero tampoco es unica. Son fenomenos complejos y su descripcion puede tenermuchos grados de profundidad.
6.3.1. Ley de Malthus y el decaimiento radioactivo
Malthus5 postulo esta famosa ecuacion:
dy(x)
dx= k y(x) (6.11)
con k > 0 o k < 0 y y(0) = y0, Es facil verificar que la solucion viene dada por:
y(t) = y0 ek t . (6.12)
Para k < 0 tenemos una situacion de decaimiento: la poblacion decrece con el tiempo. Este concepto seutiliza los procesos de decaimiento radiactivo. El tiempo de vida media se define como el tiempo necesariopara que la mitad de los nucleos decaigan, lo cual es independiente de la cantidad de la muestra y permitemedir la edad de todo aquello que contenga isotopos radioactivos. En particular el C14 del cual se sabe que:tiene una vida media de 5730 anos y que todos los organismos estan (o estuvieron) formados por carbono.Por lo tanto, si sabemos el porcentaje de C14 en una muestra, digamos el 63 % podremos inferir su edad
y(0) = 1
y(5730) = ek 5730 = 12
Por lo tanto, despejando k
k =− ln 2
5730tendremos finalmente
y(t) = 2−t/5730
de aquı obtendremos la edad en anos de la muestra
y(t) = 0,63 ⇒ t = − ln 0,63
ln 25730 ≈ 3819,48
5En honor al economista polıtico ingles Thomas Robert Malthus (1766-1834). Quien fue uno de los primeros en darse cuentaquen la poblacion crece como una razon geometrica mientras que los medios de subsistencias crecen de manera aritmetica. Estaafirmacion plasmada en su Ensayo sobre el Principio de Poblaciones, el cual inspiro a Darwin en la formulacion de principiode seleccion natural. Malthus, muy religioso y creyente pensaba que esa diferencia en el crecimiento de la poblacion y lasnecesidades que ellas generaban, eran de procedencia divina y que forzarıa a la humanidad a ser mas laboriosa e ingeniosa paralograr los medios de subsistencia. Darwin, no tan religioso, lo formulo como una situacion natural presente en todas las especies.
223
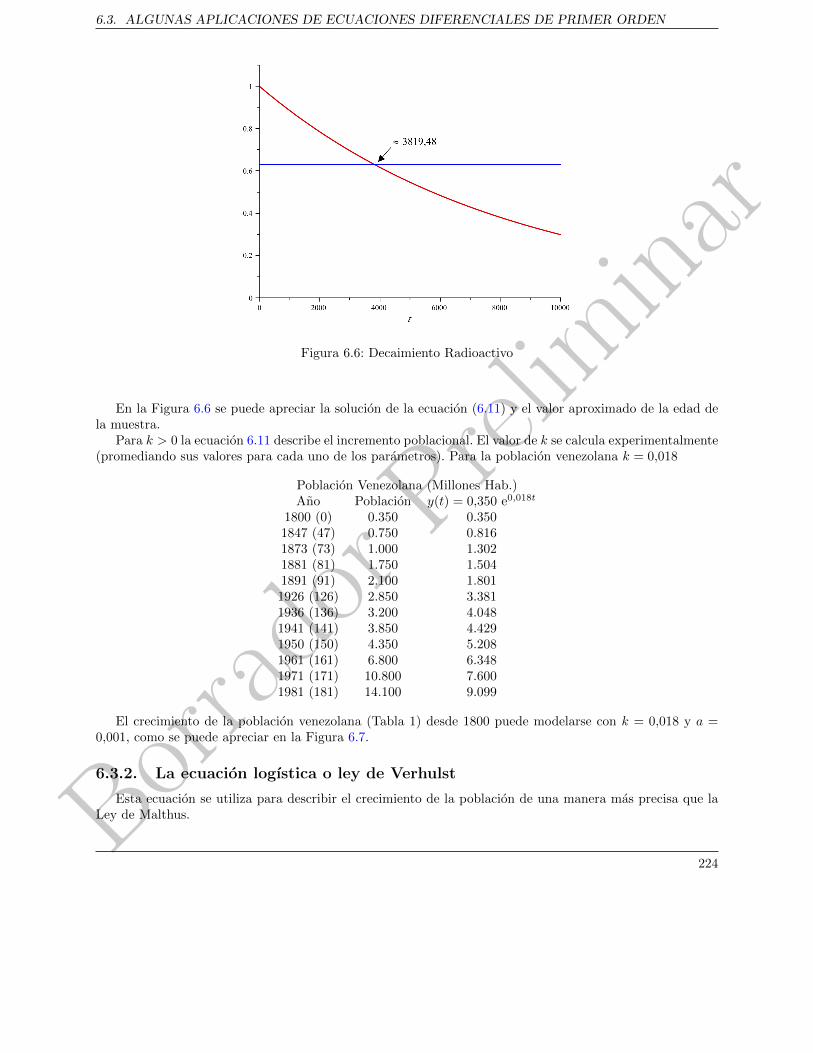
Borra
dor Pre
limin
ar
6.3. ALGUNAS APLICACIONES DE ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 6.6: Decaimiento Radioactivo
En la Figura 6.6 se puede apreciar la solucion de la ecuacion (6.11) y el valor aproximado de la edad dela muestra.
Para k > 0 la ecuacion 6.11 describe el incremento poblacional. El valor de k se calcula experimentalmente(promediando sus valores para cada uno de los parametros). Para la poblacion venezolana k = 0,018
Poblacion Venezolana (Millones Hab.)Ano Poblacion y(t) = 0,350 e0,018t
1800 (0) 0.350 0.3501847 (47) 0.750 0.8161873 (73) 1.000 1.3021881 (81) 1.750 1.5041891 (91) 2.100 1.8011926 (126) 2.850 3.3811936 (136) 3.200 4.0481941 (141) 3.850 4.4291950 (150) 4.350 5.2081961 (161) 6.800 6.3481971 (171) 10.800 7.6001981 (181) 14.100 9.099
El crecimiento de la poblacion venezolana (Tabla 1) desde 1800 puede modelarse con k = 0,018 y a =0,001, como se puede apreciar en la Figura 6.7.
6.3.2. La ecuacion logıstica o ley de Verhulst
Esta ecuacion se utiliza para describir el crecimiento de la poblacion de una manera mas precisa que laLey de Malthus.
224

Borra
dor Pre
limin
ar
6.3. ALGUNAS APLICACIONES DE ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 6.7: Poblacion de Venezuela desde 1800
Esta ecuacion toma en cuenta le decrecimiento de la poblacion con el termino −y2
y′ = (k − ay) y = ky − ay2
donde k y a son constantes arbitrarias. Esta ecuacion es separable y la solucion tiene la forma de
ln
∣∣∣∣ y
k − ay
∣∣∣∣ = k t+ C ,
y por lo tanto
y(t) =k y0
a y0 + (k − a y0) e−k t.
Notese que para k > 0, resulta que
lımt→∞
[k y0
a y0 + (k − a y0) e−k t
]=k
a.
6.3.3. La Ley de enfriamiento de Newton
Esta ley viene expresada de la siguiente forma
dT
dt= k(T − Tm) , T (0) = T0 (6.13)
la solucion seraT = (T0 − Tm) ek t + Tm .
La grafica para el caso de una torta recien sacada del horno y que se encuentra a una temperatura deT0 = 176◦, con una temperatura ambiente de Tm = 23◦, y con T (8) = 63◦, se aprecia en la Figura 6.8(k ≈-0.1677).
225

Borra
dor Pre
limin
ar
6.3. ALGUNAS APLICACIONES DE ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 6.8: Enfriamiento de una torta recien horneada
Tambien se puede modelar el enfriamiento con una temperatura del ambiente variable esto es:
dT
dt= k [T − Tm(t)] T (0) = T0
tomese, por ejemplo,
Tm(t) = 23− 10 cos
(π t
12
)con 0 ≤ t ≤ 24 horas
entonces:dT
dt=
1
4
[T − 23− 7 cos
(π t
12
)]con la solucion
T (t) = C e14 t +
207 + 23π2 + 63 cos(π t12
)− 21π sen
(π t12
)9 + π2
si T (0) = 15◦, entonces la constante C resulta ser
C = −135 + 8π2
9 + π2
es decir:
T (t) =
(−135 + 8π2
9 + π2
)e
14 t +
207 + 23π2 + 63 cos(π t12
)− 21π sen
(π t12
)9 + π2
.
6.3.4. Interes compuesto.
Otra de las aplicaciones de las ecuaciones diferenciales es en el calculo del crecimiento del capital inicialC0, depositado en un banco durante un cierto lapso de tiempo y sujeto a una determinada tasa de interes ζ.Luego del lapso de tiempo, el nuevo capital sera
C1 = C0(
1 +ζ
100
)
226

Borra
dor Pre
limin
ar
6.3. ALGUNAS APLICACIONES DE ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Pasados dos lapsos (anos) de tiempo el capital sera:
C2 = C1(
1 +ζ
100
)= C0
(1 +
ζ
100
)(1 +
ζ
100
)y en t lapsos de tiempo:
C(t) = C0(
1 +ζ
100
)tAhora bien, si el pago de los intereses se hace varias veces durante ese lapso, entonces tendremos
C2 = C1
(1 +
ζ
100 · 2
)= C0
(1 +
ζ
100 · 2
)(1 +
ζ
100 · 2
).
Finalmente, si el interes se paga k veces en cada lapso, entonces
C(t) = C0(
1 +ζ
100 · k
)kt. (6.14)
Si k = 12 entonces se tienen intereses pagaderos sobre saldos mensuales. En el caso de que k = 365, losintereses son pagaderos sobre saldos diarios. Notese que si
k →∞⇒(
1 +ζ
100 · k
)kt→ e(
ζ100 t) ;
entonces, podemos aproximar este modelo discreto de pagos sobre saldos por uno continuo, i.e.
C(t) = C0e(ζ
100 t) ⇔ C′(t) =ζ
100C(t) .
Existen situaciones en las cuales los bancos, movidos por la competencia, ofrecen cancelar los interesessobre un ano hipotetico de 360 dıas. En este caso, el capital crece como:
C(t) = C0(
1 +ζ
100 · 360
)365t
. (6.15)
La siguiente tabla muestra una comparacion del crecimiento del capital inicial C0 = 1, en un lapso de 10anos, sujeto a intereses del 40 % sobre saldos diarios y siguiendo los tres modelos antes mencionados.
Anos C(t) = e(ζ
100 t) C(t) =(
1 + ζ100·k
)ktC(t) =
(1 + ζ
100·360
)365t
0 1.0 1.0 1.01 1.491497997 1.491824698 1.4997979722 2.224566275 2.225540928 2.2493939573 3.317936142 3.320116923 3.3736364944 4.948695110 4.953032424 5.0597731725 7.380968843 7.389056099 7.5886375426 11.00870024 11.02317638 11.381423207 16.41945436 16.44464677 17.069835438 24.48958329 24.53253020 25.601304559 36.52616442 36.59823444 38.3967846510 54.47870107 54.59815003 57.58741975
227

Borra
dor Pre
limin
ar
6.3. ALGUNAS APLICACIONES DE ECUACIONES DIFERENCIALES DE PRIMER ORDEN
6.3.5. Mecanica elemental
El estudio del movimiento de los cuerpos sometidos a la accion de un conjunto de fuerzas externas, fueuna de las principales motivaciones para el planteamiento y solucion de las ecuaciones diferenciales.∑
externas
F(r(t),v(t), t) =d(mv(t))
dt= m a(t) , (6.16)
para sistemas con m = cte (partıculas), con v(t) la velocidad y r(t) la posicion.
6.3.6. Movimientos con aceleracion constante
En carreras de velocidad, en las cuales los autos tienen que generar el maximo posible de velocidad parauna distancia dada tendremos, que la ecuacion Newton (6.16) se expresa de la siguiente forma
cte = F = mdv(t)
dt⇒
v(t) = v0 +
F
mt
x(t) = x0 + v0t+1
2
F
mt2
Los valores tıpicos para este caso son v0 = r0 = 0 , a = Fm = 9,8 ms−2, y por lo tanto la velocidad final a los
400 m es:vf =
√2ax ≈ 89 m/s = 320, 4 Km/h .
Friccion en fluidos
En la descripcion del movimiento de un paracaidista la ecuacion (6.16) se convierte en:∑ext.
F (v(t)) = −mg + ηv2 (6.17)
=dp(t)
dt= m
dv(t)
dt= m a(t) ,
con η una constante arbitraria que depende de la forma del cuerpo.Integrando esta ecuacion separable se obtiene
v(t) = −vt
1− exp(− 2gt
vt
)1 + exp
(− 2gt
vt
) . (6.18)
Donde hemos definido la velocidad terminal como:
vt ≡√mg
η,
la velocidad que anula la sumatoria de fuerzas y a partir de la cual el cuerpo cae sin aceleracion.El tiempo que tarda en alcanzar esa velocidad es estrictamente para t −→ ∞, sin embargo, una buena
aproximacion que surge de la ecuacion (6.18), la constituye: t� vt/2g . La velocidad terminal tıpica en un dıasoleado para un paracaidista de 70 Kg, en posicion de “aguila extendida”, es 54 ms−1 (194, 4 Km h−1) y porlo tanto alcanza la velocidad terminal luego de aproximadamente 15 s, esta situacion se aprecia claramenteen la Figura 6.9.
228

Borra
dor Pre
limin
ar
6.3. ALGUNAS APLICACIONES DE ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 6.9: Velocidad y posicion del paracaidista en funcion del tiempo.
Por su parte, la posicion surge al integrar la ecuacion (6.18)
v(t) =dy(t)
dt= −vt
1− exp(− 2gt
vt
)1 + exp
(− 2gt
vt
) ,
integrando esta ecuacion obtendremos
y0 − y(t) = vt
t+vtg
ln
2
exp(− 2gt
vt
)+ 1
. (6.19)
Con el comportamiento grafico que muestra la Figura 6.9.
Fuerzas elasticas
Otra situacion muy conocida se presenta bajo la accion de fuerzas elasticas. Ası, la ecuacion (7.40), ahorase expresa como ∑
ext.
F (v(t)) = −kx(t) = mdv(t)
dt= ma(t) . (6.20)
Utilizando la “regla de la cadena”
dv(t)
dt=
dv(t)
dx(t)
dx(t)
dt= v(t)
dv(t)
dx(t).
Se convierte en separable y se integra para obtener la velocidad:
mv(t)2 = −kx(t)2 + C1 ⇒ v(t) =dx(t)
dt=
√−k x(t)2 + C1
m. (6.21)
La posicion sera
x(t) = C1 sen
(√k
mt+ C2
).
229

Borra
dor Pre
limin
ar
6.3. ALGUNAS APLICACIONES DE ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 6.10: Trayectoria de la Flecha al abandonar el arco.
Para analizar el caso del lanzamiento de una flecha (23 g) por una arco de 30 lb (134 N) el cual un arqueropuede separarlo 0,72 m se obtiene la velocidad de salida de la flecha como
vf = d
√k
m= 0, 72
√1340,72
23× 10−3= 65 m/s
Es interesante mencionar que en 100 m la flecha baja una distancia de ≈ 11 m.
Sistemas de masa variable
Otro de los ejemplos interesantes es la evolucion de sistemas de masa variable. El primero de los casos aconsiderar tiene que ver con una barca de masa m0 que tiene una velocidad inicial v0 en su navegar, comienzaa llover y se va llenando de agua. El agua se acumula con una tasa σ (masa por unidad de tiempo). Se pideencontrar la velocidad de la barca como funcion del tiempo.
P = mv = const = m0v0
si dmdt = σ = cont ⇒ m (t) = m0 + σt, y consecuentemente
v (t) = v0m0
m0 + σt.
Un segundo caso tiene que ver con una masa M atada a una cadena de densidad lineal de masa ρ. Estamasa se impulsa hacia arriba con una velocidad inicial v0. Se pide encontrar el tiempo en que alcanza laaltura maxima. La ecuacion de Newton para este caso se puede expresar como
−Pmasa − Pcadena =d (mv)
dt⇔ −Mg − ρxg =
dm
dtv +
dv
dtm
o equivalentemente
−gρξ =dp
dt, donde:
ξ = M
ρ + x
y
p = mv = ρξ dξdt
230

Borra
dor Pre
limin
ar
6.3. ALGUNAS APLICACIONES DE ECUACIONES DIFERENCIALES DE PRIMER ORDEN
con lo cual
−gρξp = pdp
dt⇒ −gρξmdξ = pdp ⇒ −gρξρξdξ = pdp
−∫ ξ
Mρ
gρ2ξ2dξ =
∫ p
m0v0
pdp ⇒ gρ2
ξ3
3−
(Mρ
)3
3
=p2
2− (m0v0)
2
2
t− t0 =
∫ρξdξ√
2gρ2
[ξ3
3 −(Mρ )
3
3 + (m0v0)2
2
] .
Un cohete en movimiento
Finalmente el caso mas emblematico es el movimiento de un cohete que consume una fraccion importantede su combustible. Llamemos v la velocidad de cohete para un instante de tiempo t y v′ la velocidad de salidade los gases respecto a tierra. Para ese instante t la cantidad de movimiento del cohete es mv un instante dtmas tarde la cantidad de movimiento sera
p′ = (m+ dm)(v + dv)︸ ︷︷ ︸cohete
+ (−dm)v′︸ ︷︷ ︸gases
= mv +m dv − dm (v′ − v)︸ ︷︷ ︸vel. rel.
Entonces, el cambio en la cantidad de movimiento sera
dp = p′ − p = mdv − vgases dm
y por lo tanto la ecuacion de Newton
m(t)dv(t)
dt− vgases
dm
dt=
∑externas
F
Despreciando la resistencia del aire y suponiendo la gravedad constante, tendremos
dv(t)
dt− vgases
m
dm
dt= −g
integrando
v = v0 + vgases ln
[mi
m(t)
]− gt
si suponemos que el combustible se quema de la forma
m(t) = mi(1 + αt)↔ dm
dt= α = cte .
La cantidad
E = vgases
∣∣∣∣dmdt∣∣∣∣ ,
se denomina el empuje del cohete.
231

Borra
dor Pre
limin
ar
6.3. ALGUNAS APLICACIONES DE ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 6.11: Velocidad y posicion del Cohete
6.3.7. Modelado de concentraciones de soluciones
Otro de los problemas tıpicos donde se aplican exitosamente las ecuaciones diferenciales son los problemasde manejo de concentracion de sustancias en soluciones lıquidas. El principal objetivo, consiste en plantearel problema en termino del problema de valores iniciales que gobierna el fenomeno (ecuacion diferencial +condiciones iniciales). Para ello, en este tipo de problemas, siempre utilizaremos la regla intuitiva de
Tasa de cambio de la concentracion = Tasa de ingreso− Tasa de egreso
Ası, tendremos que para un problema tıpico en el cual inicialmente se encuentran diluidos en un recipiente(un tanque) y0 gr de una sustancia en V0 litros de un lıquido. A este tanque le cae otro lıquido con unaconcentracion distinta de la misma sustancia a ventrada lit/min, mientras que vsalida lit/min salen del tanque.
Si suponemos que dentro del tanque sucede algun proceso de homogenizacion de la solucion, la preguntatıpica es que queremos saber la cantidad de sustancia que se encuentra en el tanque en un tiempo t. A laconcentracion de la sustancia en el lıquido de entrada (gr/lit), en un tiempo t, la denotaremos como C (t)gr/lit. La figura (6.12) ilustra este proceso.
Para empezar notemos que, en esta situacion el volumen no es constante. Por lo tanto, con el mismoespıritu de la “ley de balanceo” que hemos propuesto, si las velocidades de ingreso y egreso son constantes,nos queda que la variacion del volumen inicial viene dada por la diferencia de estas velocidades, esto es
V ′ (t) = ventrada − vsalida ⇒ V (t) = V0 + (ventrada − vsalida) t ,
con lo cual tambien hemos integrado una ecuacion diferencial para encontrar como variara el volumen conel tiempo.
Para la construccion de la ecuacion diferencial, procedemos de manera similar y si describimos la cantidadde sustancia en el tanque como y (t), nos queda que la tasa de cambio de la cantidad de sustancia en el tanquesera
y′ (t) = ventrada
(lit
mın
)C (t)
(gr
lit
)︸ ︷︷ ︸
Tasa de Ingreso
− vsalida
(lit
mın
)(y (t)
V0 + (ventrada − vsalida) t
gr
lit
)︸ ︷︷ ︸
Tasa de Egreso
Por lo tanto la ecuacion diferencial tomara la forma tıpica de una ecuacion diferencial lineal de primerorden inhomogenea
y′ (t) + y (t)vsal
V0 + (vent − vsal) t= ventC (t)
232

Borra
dor Pre
limin
ar
6.3. ALGUNAS APLICACIONES DE ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 6.12: Soluciones y tanques
que tendra por solucion
y (t) =
y0
(−V0)−(
vsal
vent − vsal
) ((−vent + vsal) t− V0)
( −vsal
vent − vsal
)
︸ ︷︷ ︸Respuesta a las Condiciones iniciales
− ((−vent + vsal) t− V0)
vsal
−vent + vsal
∫ t
0
vent C (u) (u (vent − vsal) + V 0)
(vsal
vent − vsal
)du︸ ︷︷ ︸
Respuesta a la Exitacion externa
Notese lo generico de esta solucion. Por un lado, la concentracion de la sustancia, C (t) , en la solucionque entra al sistema es distinta a la concentracion de la sustancia presente en el tanque, mas aun, puedeser variable con el tiempo. Por otro lado esta solucion presenta una singularidad (un infinito) cuando lavelocidad de ingreso es igual a la velocidad de egreso. Para este caso en el cual el volumen del tanquepermanece constante tendremos que resolver la ecuacion diferencial
y′ (t) + y (t)vsal
V0= ventC (t)⇒ y (t) =
(∫ t
0
C (u) ventrada e
(vsalida u
V
)du+ y0
)e−
vsalida t
V
Tal y como hemos mencionado varias veces (y seguiremos mencionando) la solucion general para una ecua-cion diferencial in homogenea se compone de dos soluciones, la solucion de la ecuacion diferencial homogeneamas la solucion de la inhomogena.
ygeneral (x) = yhomogenea (x) + yinhomogenea (x) .
Este ejemplo nos permite constatar el sentido cada una de estas soluciones, vale decir
y (t) = y0e−
vsalida t
V︸ ︷︷ ︸Respuesta a las Condiciones Iniciales
+ e−
vsalida t
V
∫ t
0
C (u) ventrada e
(vsalida u
V
)du︸ ︷︷ ︸
Respuesta a la Exitacion externa
233

Borra
dor Pre
limin
ar
6.3. ALGUNAS APLICACIONES DE ECUACIONES DIFERENCIALES DE PRIMER ORDEN
En esta es una vision que debemos conservar, en general para todas las ecuaciones lineales inhomogeneasindependientes del orden de la ecuacion diferencial, ası recordando, dada una ecuacion diferencial y susolucion tal que se cumple la condicion inicial y (0) = y0 entonces siempre es posible
d
dxy (x) + p (x) y (x) = g (x)⇔ y (x) = y0e
∫ x0−p(u)du︸ ︷︷ ︸
solucion homgenea
+ e∫ x0−p(u)du
∫ x
0
g (u) e∫p(u)dudu︸ ︷︷ ︸
Solucion inhomogenea
,
donde ahora vemos claramente que la solucion de la homogenea da cuenta a las condiciones iniciales delproceso y la solucion de la inhomogenea provee la respuesta a la excitacion externa al sistema.
Este comportamiento de las soluciones es util si nos planteamos que al tratar de “limpiar” una piscina,a la cual le hemos anadido el doble de la cantidad de sulfatos permitida, y queremos saber cuanto tiempotenemos que mantener abierta una entrada de 120 lits/min de agua sin sulfatos y la salida de la piscina queresponde a 60 lits/min. La piscina en cuestion tiene 20 m de longitud, 10 m de ancho y 2 m de profundidad.Siguiendo los pasos anteriormente planteados, tendremos que
y′ (t) + y (t)
(vsal
V0 + (vent − vsal) t
)= 0⇒ y′ (t) + y (t)
60
(lit
mın
)4× 105lit + (120− 60) t
(lit
mın
) = 0
y′ (t) + y (t)
60
(lit
mın
)4× 105lit + 60
(lit
mın
)t
= 0⇒ y (t) = 20000y0
3t+ 20000
donde el volumen es V = 400m3 = 400 (100cm)3
= 4× 108cm3 = 4× 108(10−3lit
)= 4× 105 lit.
Con lo cual el tiempo para que la cantidad final decaiga a la mitad de la inicial surge de
y0 = 200002y0
3t+ 20000⇒ t ≈ 6.666,66 minutos !!!!!
6.3.8. Ejemplos
6.3.9. Practicando con Maxima
6.3.10. Ejercicios
234

Borra
dor Pre
limin
arCapıtulo 7Ecuaciones diferenciales ordinarias de ordenmayor a 1
235

Borra
dor Pre
limin
ar
Vamos a estudiar algunos metodos para resolver ecuaciones diferenciales ordinarias de orden mayor a 1,esto es, ecuaciones del tipo
F [x, y(x), y′(x), y′′(x), ..., y(n)(x)] = 0 .
Primero estudiemos las lineales.Una ecuacion diferencial lineal de orden n, es una ecuacion de la forma
fn(x)y(n)(x) + fn−1(x)y(n−1)(x) + · · ·+ f2(x)y′′(x) + f1(x)y′(x) + f0(x)y(x) = Q(x) , (7.1)
donde f0(x), f1(x), f2(x), ..., fn(x) y Q(x) son funciones contınuas de x en un intervalo I y fn(x) 6= 0.Si Q(x) 6= 0 la E.D.O se denomina una E.D.O. Lineal de orden n inhomogenea. Si Q(x) = 0 se llama una
E.D.O. Lineal de orden n homogenea.
Teorema: Si f0(x), f1(x), f2(x), ..., fn(x) y Q(x) son todas funciones contınuas sobre un intervalo comunI, y fn(x) 6= 0 cuando x ∈ I, entonces la ecuacion diferencial
fn(x)y(n)(x) + fn−1(x)y(n−1)(x) + · · ·+ f2(x)y′′(x) + f1(x)y′(x) + f0(x)y(x) = Q(x) ,
tiene una y solo una soluciony = y(x) ,
que satisface el conjunto de condiciones iniciales
y(x0) = y0, y′(x0) = y1, y
′′(x0) = y2, . . . , y(n)(x0) = yn−1 .
Donde x0 ∈ I y y0, y1, y2, . . . , yn−1 son constantes.
Estudiemos algunas propiedades
1. La ecuacion diferencial homogenea asociada a la ecuacion (7.1), es decir, cuando Q(x) = 0:
fn(x)y(n)(x) + fn−1(x)y(n−1)(x) + · · ·+ f2(x)y′′(x) + f1(x)y′(x) + f0(x)y(x) = 0 , (7.2)
tienen n soluciones linealmente independientes: y1(x), y2(x), y3(x), . . . , yn(x).
2. La combinacion lineal de esas soluciones
yh(x) = c1y1(x) + c2y2(x) + c3y3(x) + · · ·+ cnyn(x) ,
donde c1, c2, c3, . . . , cn son un conjunto de constantes arbitrarias, es tambien una solucion de (7.2). Dedice que se tiene una familia n-parametrica de soluciones de la ecuacion (7.2).
3. La funciony(x) = yh(x) + yp(x) ,
donde yp(x) es una solucion particular de la ecuacion diferencial inhomogenea (7.1), es una familian-parametrica de soluciones de la ecuacion (7.1).
4. Si yp(x) es una solucion particular de (7.1), entonces αyp(x) es una solucion de (7.1) si reemplazamosQ(x) por αQ(x).
236

Borra
dor Pre
limin
ar
7.1. LINEALES HOMOGENEAS CON COEFICIENTES CONSTANTES
5. Si yp1(x) es una solucion de:
fn(x)y(n)(x) + fn−1(x)y(n−1)(x) + · · ·+ f2(x)y′′(x) + f1(x)y′(x) + f0(x)y(x) = Q1(x)
y yp2(x) es una solucion de
fn(x)y(n)(x) + fn−1(x)y(n−1)(x) + · · ·+ f2(x)y′′(x) + f1(x)y′(x) + f0(x)y(x) = Q2(x)
entonces yp(x) = yp1(x) + yp2(x) es una solucion de
fn(x)y(n)(x) + fn−1(x)y(n−1)(x) + · · ·+ f2(x)y′′(x) + f1(x)y′(x) + f0(x)y(x) = Q1(x) +Q2(x) .
Esta propiedad se conoce como el Principio de Superposicion.
6. Si yp(x) = u(x) + iv(x) es una solucion de
fn(x)y(n)(x) + fn−1(x)y(n−1)(x) + · · ·+ f2(x)y′′(x) + f1(x)y′(x) + f0(x)y(x) = R(x) + iC(x) ,
entonces, la funcion u(x) es una solucion de
fn(x)y(n)(x) + fn−1(x)y(n−1)(x) + · · ·+ f2(x)y′′(x) + f1(x)y′(x) + f0(x)y(x) = R(x) ,
y la parte imaginaria v(x) es una solucion de
fn(x)y(n)(x) + fn−1(x)y(n−1)(x) + · · ·+ f2(x)y′′(x) + f1(x)y′(x) + f0(x)y(x) = C(x) ,
7.1. Lineales homogeneas con coeficientes constantes
Por lo general, las ecuaciones del tipo (7.1) donde los coeficientes f0(x), f1(x), f2(x), . . . , fn(x) no pre-sentan ningun tipo de restriccion no tienen soluciones exactas. Recordemos que las soluciones exactas sonaquellas que se pueden escribir en terminos de funciones elementales. Sin embargo, si los coeficientes de (7.1)son todos constantes es posible obtener soluciones exactas.
Una ecuacion diferencial lineal con coeficientes constantes es una ecuacion de la forma
any(n)(x) + an−1y
(n−1)(x) + · · ·+ a2y′′(x) + a1y
′(x) + a0y(x) = 0 , (7.3)
donde a0, a1, a2, . . . , an son constantes y an 6= 0.Consideremos (¡o adivinemos!) que una posible solucion a la ecuacion (7.3) tiene la forma
y(x) = emx . (7.4)
Ahora bien, ¿que forma debe tener m para que (7.4) sea la solucion de (7.3)? Sustituyamos la solucion deprueba (7.4) en (7.3):
andn
dxnemx + an−1
dn−1
dxn−1emx + · · ·+ a2
d2
dx2emx + a1
d
dxemx + a0e
mx
anmnemx + an−1m
n−1emx + · · ·+ a2m2emx + a1me
mx + a0emx = 0
anmn + an−1m
n−1 + · · ·+ a2m2 + a1m+ a0 = 0 (7.5)
De esta manera hemos respondido a la pregunta: el valor de m que hace que (7.4) sea la solucion de(7.3) es aquel valor que satisface esta ultima ecuacion algebraica de grado n. La ecuacion (7.5) tendra por lo
237

Borra
dor Pre
limin
ar
7.1. LINEALES HOMOGENEAS CON COEFICIENTES CONSTANTES
menos n raıces que denotaremos por: m1,m2,m3, . . . ,mn. Esto significa que cada funcion yi(x) = emix coni = 1, 2, 3 . . . sera una solucion de (7.3).
La ecuacion (7.5) se denomina Ecuacion Caracterıstica de (7.3) y se obtiene de una manera muy sencillasimplemente intercambiando y′(x) por m y el orden de la derivada por su correspondiente valor numerico.Por ejemplo:
5y′′(x) + 3y′(x) + y(x) = 0 ⇒ 5m2 + 3m+ 1 = 0 .
Como se puede ver, la ecuacion caracterıstica
anmn + an−1m
n−1 + · · ·+ a2m2 + a1m+ a0 = 0 ,
condicionara la solucion de la siguiente forma
1. Si m es una raız real con multiplicidad k = 2 entonces las k soluciones asociadas con m seran de laforma
emx, xemx, x2emx, x3emx, · · · , xk−1emx .
2. Si m y m son parejas de soluciones complejas, α±iβ , del polinomio caracterıstico y tienen multiplicidadk, entonces las soluciones correspondientes seran
eαx cos(βx), eαxsen(βx), · · · , xk−1eαx cos(βx), xk−1eαxsen(βx) .
Podemos ver algunos casos y ejemplos
La ecuacion
24y′′′ + 2y′′ − 5y′ − y = 0 ⇔ 24r3 + 2r2 − 5r − 1 = (3r + 1)(2r − 1)(4r + 1) = 0 ,
consecuentemente tendra las raıces
m1 = −1
3, m2 =
1
2, m3 = −1
4,
y una solucion de la formay(x) = C1e
−x/3 + C2ex/2 + C3e
−x/4 .
La ecuaciony′′′ + 3y′′ + 3y′ + y = 0 ⇔ r3 + 3r2 + 3r + 1 = (r + 1)3 = 0 ,
con las raıces m = −1 y con multiplicidad k = 3, tendra una solucion de la forma
y(x) = C1e−x + C2xe
−x + C3x2e−x .
La ecuacion
4y(4) + 12y′′′ + 49y′′ + 42y′ + 10y = 0 ⇔ 4r4 + 12r3 + 49r2 + 42r+ 10 = (r2 + 2r+ 10)(2r+ 1)2 = 0 ,
con raıces
m1 = −1 + 3i, m2 = −1− 3i, m3 = −1
2, con multiplicidad 2 .
Tendra como solucion
y(x) = e−x [C1 cos(3x) + C2sen(3x)] + C3e−x/2 + C4xe
−x/2
238

Borra
dor Pre
limin
ar
7.1. LINEALES HOMOGENEAS CON COEFICIENTES CONSTANTES
La ecuacion
y(4) + 4y′′′ + 24y′′ + 40y′ + 100y = 0 ⇔ r4 + 4r3 + 24r2 + 40r + 100 = (r2 + 2r + 10)2 = 0 ,
tendra las raıcesm1 = −1 + 3i, m2 = −1− 3i, con multiplicidad 2 .
Y una solucion de la forma
y(x) = e−x [C1 cos(3x) + C2sen(3x) + C3 x cos(3x) + C4 xsen(3x)]
La ecuacion4y′′′ + 33y′ − 37y = 0 ,
cony(0) = 0; y′(0) = −1; y′′(0) = 3 ⇔ 4r3 + 33r − 37 = (r − 1)(4r2 + 4r + 37) = 0 ,
consecuentemente con una solucion general de la forma
y(x) = C1ex + e−x/2 [C2 cos(3x) + C3sen(3x)] ,
y con la solucion particular
y(x) =8
45ex − e−x/2
[8
45cos(3x) +
19
45sen(3x)
].
Como pudimos ver, al buscar las raıces de la ecuacion caracterıstica puede ocurrir varios casos los cualesvamos a resumir a continuacion.
7.1.1. Las raıces de la ecuacion caracterıstica son todas diferentes
Cuando las n raıces de la ecuacion (7.5) son distintas entonces las n soluciones linealmente independientesde (7.3) se pueden escribir como:
y1(x) = em1x , y2(x) = em2x , y3(x) = em3x , . . . , yn(x) = emnx ,
por lo tanto, la solucion general de (7.3) sera
y(x) = c1em1x + c2e
m2x + c3em3x + · · ·+ cne
mnx .
7.1.2. Las raıces de la ecuacion caracterıstica se repiten
Cuando la ecuacion caracterıstica tiene una raız m = a que se repite k veces, entonces la solucion generalde (7.3) es
y(x) =(c1 + c2x+ c3x
2 + · · ·+ cnxk−1)eax
Si la ecuacion caracterıstica presenta raıces multiples puede ser que la ecuacion caracterıstica se pueda escribircomo una coleccion de productos de terminos, por ejemplo, supongamos que la ecuacion caracterıstica sepuede factorizar de la forma siguiente
m2(m− a)3(m+ b)4(m+ c) = 0 ,
239

Borra
dor Pre
limin
ar
7.1. LINEALES HOMOGENEAS CON COEFICIENTES CONSTANTES
en este caso se tiene que las raıces son
m = 0 (2 veces) → y1 = c1 + c2x
m = a (3 veces) → y2 =(c3 + c4x+ c5x
2)eax
m = −b (4 veces) → y3 =(c6 + c7x+ c8x
2 + c9x3)e−bx
m = −c (1 vez) → y4 = c10e−cx
La solucion general sera entonces
y(x) = c1 + c2x+(c3 + c4x+ c5x
2)eax +
(c6 + c7x+ c8x
2 + c9x3)e−bx + c10e
−cx .
7.1.3. Las raıces de la ecuacion caracterıstica son numeros complejos
Puede suceder tambien que las raıces resultantes sean numeros complejos. En este caso es bueno notarque si lo coeficientes de la ecuacion caracterıstica son todos reales, entonces las raıces imaginarias que puedanaparecer lo haran en la forma de pares conjugados, es decir, que si a+ib es una raız entonces a−ib tambien losera. Supongamos por un momento que m1 = a+ib y m2 = a−ib son dos raıces de la ecuacion caracterıstica,entonces la solucion de la ecuacion diferencial de segundo orden asociada sera:
y(x) = c1e(a+ib)x + c2e
(a−ib)x = c1eaxeibx + c2e
axe−ibx = eax[c1e
ibx + c2e−ibx]
si utilizamos la formula de Euler
y(x) = eax [c1{cos(bx) + isen(bx)}+ c2{cos(bx)− isen(bx)}]= eax [(c1 + c2) cos(bx) + i(c1 − c2) sen(bx)]
= eax [C1 cos(bx) + i C2 sen(bx)]
lo que viene a ser una segunda manera de escribir la solucion de la ecuacion diferencial.
7.1.4. Ejemplos
1. Queremos encontrar la solucion general de
y′′′ + 2y′′ − y′ − 2y = 0 .
La ecuacion caracterıstica asociada a la ecuacion diferencial es
m3 + 2m2 −m− 2 = 0 ⇒
m1 = 1m2 = −1m3 = −2
por lo tanto, la solucion general es:
y(x) = c1ex + c2e
−x + c3e−3x .
2. Intentemos encontrar la solucion general de
y′′′′ − 3y′′ + 2y′ = 0 .
240

Borra
dor Pre
limin
ar
7.2. LINEALES NO HOMOGENEAS CON COEFICIENTES CONSTANTES
La ecuacion caracterıstica asociada a la ecuacion diferencial es
m4 − 3m2 + 2m = 0 ⇒
m1 = 0m2 = 1m3 = 1m4 = −2
la solucion seray(x) = c1 + (c2 + c3x) ex + c4e
−2x .
3. Encontremos la solucion general dey′′′′ + 2y′′ + 1 = 0 .
La ecuacion caracterıstica asociada a la ecuacion diferencial es
m4 + 2m2 + 1 = 0 ⇒(m2 + 1
)2= 0 ⇒
m1 = im2 = im3 = −im4 = −i
la solucion sera entonces de la forma
y(x) = (c1 + c2x)eix + (c3 + c4x)e−ix .
4. Veamos otro ejemplo, encontrar la solucion general de
y′′′ − 8y′′ + 22y′ − 20y = 0 .
La ecuacion caracterıstica asociada es
m3 − 8m2 + 22m− 20 = 0 ⇒ (m− 2)(m2 − 6m+ 10
)= 0 ⇒
m1 = 2m2 = 3 + im3 = 3− i
la solucion sera:
y(x) = c1e2x + c2e
(3+i)x + c3e(3−i)x
= c1e2x + e3x
[c2e
ix + c3e−ix]
= c1e2x + e3x [C2 cos(x) + i C3 sen(x)] .
7.1.5. Practicando con Maxima
7.1.6. Ejercicios
7.2. Lineales no homogeneas con coeficientes constantes
Antes de entrar de lleno en los metodos de solucion de ecuaciones diferenciales no homogeneas vamosa estudiar una herramienta que es utilizada para demostrar que un conjunto de soluciones es linealmenteindependiente. Hablaremos de el wronskiano.
Pero primero que todo recordemos el concepto de independencia y dependencia lineal de funciones.
241

Borra
dor Pre
limin
ar
7.2. LINEALES NO HOMOGENEAS CON COEFICIENTES CONSTANTES
Definicion: Independencia y dependencia lineal.Sean n funciones f1(x), f2(x), f3(x), f4(x), · · · fn(x), cuando menos n − 1 veces diferenciables.
Entonces, el conjunto S = {f1(x), f2(x), f3(x), f4(x), · · · fn(x)}, se dice linealmente dependiente enel intervalo I, si existen algunas constantes, c1, c2, c3, c4, · · · cn distintas de cero tal que
n∑i=1
ci fi(x) = c1 f1(x) + c2 f2(x) + · · ·+ cn fn(x) = 0
Por el contrario, si no existe ninguna constante ci 6= 0, se dira que S es linealmente independiente.
7.2.1. El wronskiano
Definicion: Wronskiano.El conjunto S = {f1(x), f2(x), f3(x), f4(x), · · · fn(x)} de funciones, cuando menos n − 1 veces
diferenciables, conforman el wronskiano,
W (S) = W (f1(x), f2(x), f3(x), f4(x), · · · fn(x))
a traves del siguiente determinante
W (S) =
∣∣∣∣∣∣∣∣∣f1(x) f2(x) · · · fn(x)f ′1(x) f ′2(x) · · · f ′n(x)
......
. . ....
f(n−1)1 (x) f
(n−1)2 (x) · · · f
(n−1)n (x)
∣∣∣∣∣∣∣∣∣Si W (S) 6= 0 al menos en un punto dentro del intervalo I, entonces S es linealmente independiente
Definamos ahora lo que se denomina un conjunto fundamental de soluciones.
Definicion: Conjunto fundamental de soluciones.El conjunto S = {f1(x), f2(x), f3(x), f4(x), · · · fn(x)} de n soluciones no triviales a la ecuacion
diferencial:a0(x) y(x) + a1(x) y′(x) + · · ·+ an(x) y(n)(x) = 0, (7.6)
Se le denomina conjunto fundamental de soluciones.La combinacion lineal
f(x) =
n∑i=1
ci fi(x) = c1 f1(x) + c2 f2(x) + · · ·+ cn fn(x)
tambien es solucion de la ecuacion diferencial (7.6) y se denomina como solucion general de (7.6).Adicionalmente, si los coeficientes ai(x) son continuos en el intervalo abierto I, para todo i =
1, 2, · · · , n, entonces la ecuacion diferencial (7.6) tiene un conjunto fundamental de n soluciones lineal-mente independientes.
Esto nos lleva a distinguir entre los diferentes tipos de soluciones.
242

Borra
dor Pre
limin
ar
7.2. LINEALES NO HOMOGENEAS CON COEFICIENTES CONSTANTES
Definicion: Soluciones particulares y generales.Dada una ecuacion diferencial lineal no homogenea
a0(x) y(x) + a1(x) y′(x) + · · ·+ an(x) y(n)(x) = Q(x) (7.7)
Si yp(x) es solucion de (7.7) sin constantes arbitrarias, entonces yp(x) se denomina solucion particularde (7.7). De igual modo, se denominara solucion general de (7.7) a la suma de la solucion, yh(x), de laecuacion homogenea (7.6) mas la solucion particular:
y(x) = yh(x) + yp(x) .
Anteriormente vimos que la solucion general de la ecuacion diferencial
any(n)(x) + an−1y
(n−1)(x) + · · ·+ a2y′′(x) + a1y
′(x) + a0y(x) = Q(x) ,
se puede escribir comoy(x) = yh(x) + yp(x) ,
donde yh(x) es la solucion de la ecuacion diferencial homogenea asociada a la no homogenea, es decir, cuandoQ(x) = 0, y yp(x) es una solucion particular de la ecuacion diferencial no homogenea.
Como ya sabemos de un metodo para resolver la ecuacion homogenea queda preguntarse como se hacepara calcular una solucion particular. Veamos algunos metodos.
7.2.2. El metodo de los coeficientes indeterminados
Este metodo se utiliza si la funcion Q(x) esta conformada por funciones que tienen un numero finitode derivadas linealmente independientes, es decir, que Q(x) contenga unicamente terminos del tipo: a, xk,eax, sen (ax), cos(ax) y combinaciones lineales de tales terminos. Por ejemplo, si Q(x) = sen(ax) podemosconstruir un conjunto con las derivadas sucesivas, esto es:
sen (ax) →{a cos(ax) , −a2sen (ax) , −a3 cos(ax) , a4sen (ax) . . .
}pero de este conjunto infinito unicamente las funciones: {sen (ax) , cos(ax)} son linealmente independientes.Otros ejemplos son:
x3 →{
3x2 , 6x , 6}
1
x→
{− 1
x2,
2
x3, − 6
x4, . . .
}Podemos estudiar el wronskiano de este conjunto de funciones para ver si son linealmente independientes.
Para el ejemplo anterior tenemos∣∣∣∣∣∣f1(x) f2(x)
f ′1(x) f ′2(x)
∣∣∣∣∣∣ =
∣∣∣∣∣∣sen (ax) cos(ax)
a cos(ax) −asen (ax)
∣∣∣∣∣∣ = −asen2 (ax)− a cos2(ax)
= −a[sen2 (ax) + cos2(ax)
]= −a 6= 0 .
Volviendo al punto que tiene que ver con la busqueda de yp(x), para el metodo de los coeficientesindeterminados necesitamos comparar los terminos de Q(x) con los de yh(x) y pueden resultar los siguientescasos:
243

Borra
dor Pre
limin
ar
7.2. LINEALES NO HOMOGENEAS CON COEFICIENTES CONSTANTES
Caso 1 La funciones Q(x) y yh(x) no contienen terminos en comun. En este caso, se construye una solucionparticular yp(x) con el conjunto conformado por Q(x) y todas sus derivadas linealmente independientes.
Por ejemplo, encuentremos la solucion general de
y′′ + 4y′ + 4y = 4x2 + 6ex .
Si resolvemos la ecuacion homogenea: y′′ + 4y′ + 4y = 0, encontraremos que
yh(x) = (c1 + c2x)e−2x
Queda claro que Q(x) y yh(x) no contienen terminos en comun. La solucion particular la construiremosde esta manera:
Q(x) = 4x2 + 6ex →{x2 , x , 1
}︸ ︷︷ ︸x2
∪ {ex}︸︷︷︸ex
No hace falta tomar en cuenta las constantes. La solucion particular sera una combinacion lineal delos elementos que resultan de la union de esos conjuntos
yp(x) = Ax2 +Bx+ C +Dex
donde las constantes A,B,C,D tendran que ser determinadas.
Una vez que la solucion es propuesta, no queda mas que derivar y sustituir en la ecuacion diferencialproblema:
y′p(x) = 2Ax+B +Dex
y′′p (x) = 2A+Dex
Al sustituir en la ecuacion diferencial resulta
[2A+Dex] + 4 [2Ax+B +Dex] + 4[Ax2 +Bx+ C +Dex
]= 4x2 + 6ex
4Ax2 + [8A+ 4B]x+ [2A+ 4B + 4C] + 9Dex = 4x2 + 6ex
igualando coeficientes4A = 4
8A+ 4B = 02A+ 4B + 4C = 0
9D = 6
⇒ A = 1 , B = −2 , C =3
2, D =
2
3,
por lo tanto, la solucion general es
y(x) = yh(x) + yp(x) = (c1 + c2x)e−2x + x2 − 2x+3
2+
2
3ex
Caso 2 Los terminos de Q(x) aparecen como xk veces un termino de la solucion yh(x), donde k es un enteropositivo. Esto es, si la funcion yh(x) contiene un termino, digamos u(x), tal que un termino de Q(x)es xku(x) entonces una solucion particular se puede construir con una combinacion lineal de xk+1u(x)y todas las derivadas linealmente independientes. En todo lo anterior se ignoran las constantes. SiQ(x) contienen terminos que cumplen con el Caso 1 estos tambien deben ser agregados a la solucionparticular.
244

Borra
dor Pre
limin
ar
7.2. LINEALES NO HOMOGENEAS CON COEFICIENTES CONSTANTES
Por ejemplo, dada la siguiente ecuacion diferencial
y′′ − 3y′ + 2y = 2x2 + 3e2x .
Si resolvemos la ecuacion homogenea: y′′ − 3y′ + 2y = 0, encontraremos que
yh(x) = c1ex + c2 e
2x︸︷︷︸u(x)
Notemos que
Q(x) = 2x2 + 3 e2x︸︷︷︸ → e2x = x0
u(x)︷︸︸︷e2x → k = 0 .
La solucion particular se puede construir a partir del siguiente conjunto:{xe2x , e2x
}︸ ︷︷ ︸x0+1e2x
∪{x2 , x , 1
}︸ ︷︷ ︸x2
Del primer conjunto no tomamos en cuenta el termino e2x porque este ya aparece en yh(x). Por lotanto, la solucion particular sera una combinacion lineal de los elementos que resultan de la union deesos conjuntos: {
xe2x , x2 , x , 1},
esto significa que proponemos como solucion particular la siguiente:
yp(x) = Ax2 +Bx+ C +Dxe2x .
Derivando:
y′p(x) = 2Ax+B + 2Dxe2x +De2x
y′′p (x) = 2A+ 4Dxe2x + 4De2x .
Al sustituir en la ecuacion diferencial resulta[2A+ 4Dxe2x + 4De2x
]− 3
[2Ax+B + 2Dxe2x +De2x
]+ 2
[Ax2 +Bx+ C +Dxe2x
]= 2x2 + 3e2x
2Ax2 + [2B − 6A]x+ [2A− 3B + 2C] +De2x = 2x2 + 3e2x .
Igualando coeficientes2A = 2
2B − 6A = 02A− 3B + 2C = 0
D = 3
⇒ A = 1 , B = 3 , C =7
2, D = 3 ,
por lo tanto, la solucion general es
y(x) = c1ex + c2e
2x + x2 + 3x+7
2+ 3xe2x .
Caso 3 Este caso se aplica si se cumplen las siguientes condiciones
245

Borra
dor Pre
limin
ar
7.2. LINEALES NO HOMOGENEAS CON COEFICIENTES CONSTANTES
1. La ecuacion caracterıstica de la ecuacion diferencial homogenea tiene una raız multiple que serepite r veces.
2. Q(x) contiene un termino que es xk veces un termino, digamos u(x), de la solucion yh(x). Lafuncion u(x) se obtiene de la raız multiple.
En este caso, la solucion particular sera una combinacion lineal de xk+ru(x) y todas las derivadaslinealmente independientes. Si ademas Q(x) contiene terminos que correspondan al Caso 1 estos debenagregarse.
Por ejemplo, dada la ecuaciony′′ + 4y′ + 4y = 3xe−2x .
Si resolvemos la ecuacion homogenea: y′′ + 4y′ + 4y = 0, encontraremos que
yh(x) = c1e−2x + c2x e
−2x︸︷︷︸u(x)
⇒ m1 = −2 , m2 = −2 ⇒ r = 2
Notemos que
Q(x) = 3xe−2x︸ ︷︷ ︸ ⇒ xe−2x = x1
u(x)︷︸︸︷e−2x ⇒ k = 1 .
La solucion particular se puede construir a partir del siguiente conjunto:{x3e−2x , x2e−2x , xe−2x , e−2x
}︸ ︷︷ ︸x1+2e−2x
No tomaremos en cuenta los terminos{xe−2x , e−2x
}porque estos ya aparecen en yh(x). Por lo tanto,
la solucion particular sera la siguiente combinacion lineal
yp(x) = Ax3e−2x +Bx2e−2x .
Se deriva
y′p(x) = −2Ax3e−2x + 3Ax2e−2x − 2Bx2e−2x + 2Bxe−2x
y′′p (x) = 4Ax3e−2x − 12Ax2e−2x + 6Axe−2x + 4Bx2e−2x − 8Bxe−2x + 2Be−2x
Se sustituye en la ecuacion diferencial[4Ax3e−2x − 12Ax2e−2x + 6Axe−2x + 4Bx2e−2x − 8Bxe−2x + 2Be−2x
]+
4[−2Ax3e−2x + 3Ax2e−2x − 2Bx2e−2x + 2Bxe−2x
]+ 4
[Ax3e−2x +Bx2e−2x
]= 3xe−2x
6Axe−2x + 2Be−2x = 3xe−2x
igualando coeficientes {6A = 32B = 0
⇒ A =1
2, B = 0 ,
por lo tanto, la solucion general es
y(x) = c1e−2x + c2xe
−2x +1
2x3e−2x .
246

Borra
dor Pre
limin
ar
7.2. LINEALES NO HOMOGENEAS CON COEFICIENTES CONSTANTES
7.2.3. Metodo de la variacion de parametros
Vamos a continuar con el estudio de los metodos para resolver ecuaciones del tipo:
any(n)(x) + an−1y
(n−1)(x) + · · ·+ a2y′′(x) + a1y
′(x) + a0y(x) = Q(x) , (7.8)
donde a0, a1, a2, ..., an son constantes y an 6= 0.El metodo de los coeficientes indeterminados, para encontrar una solucion particular de (7.30), esta
limitado por la condicion de que la funcion Q(x) sea una funcion con la que se pueda construir un conjuntofinito de derivadas linealmente independientes. Estudiemos un metodo que quita esta restriccion.
Por simplicidad, para desarrollar este metodo vamos a considerar el caso n = 2, luego veremos comogeneralizar al caso de orden n. Es decir, vamos a estudiar la ecuacion
a2y′′(x) + a1y
′(x) + a0y(x) = Q(x) , a2 6= 0 , (7.9)
donde Q(x) es una funcion continua y diferente de cero. Si y1(x) y y2(x) son un par de soluciones linealmenteindependientes de la ecuacion diferencial homogenea asociada a (7.9), es decir, de la ecuacion
a2y′′(x) + a1y
′(x) + a0y(x) = 0 , (7.10)
entonces, vamos a proponer que una solucion particular de la ecuacion (7.9) es de la forma:
yp(x) = u1(x)y1(x) + u2(x)y2(x) , (7.11)
donde u1(x) y u2(x) son dos funciones a determinar.Derivando:
y′p(x) = u′1(x)y1(x) + u1(x)y′1(x) + u′2(x)y2(x) + u2(x)y′2(x)
= [u1(x)y′1(x) + u2(x)y′2(x)] + [u′1(x)y1(x) + u′2(x)y2(x)]
y′′p (x) = u′′1(x)y1(x) + u′1(x)y′1(x) + u′1(x)y′1(x) + u1(x)y′′1 (x)
+ u′′2(x)y2(x) + u′2(x)y′2(x) + u′2(x)y′2(x) + u2(x)y′′2 (x)
= [u1(x)y′′1 (x) + u2(x)y′′2 (x)] + [u′1(x)y′1(x) + u′2(x)y′2(x)] + [u′1(x)y1(x) + u′2(x)y1(x)]′
y sustituyendo en (7.9) resulta:
a2 [u1(x)y′′1 (x) + u2(x)y′′2 (x)] + a2 [u′1(x)y′1(x) + u′2(x)y′2(x)] + a2 [u′1(x)y1(x) + u′2(x)y2(x)]′+
a1 [u1(x)y′1(x) + u2(x)y′2(x)] + a1 [u′1(x)y1(x) + u′2(x)y2(x)] + a0 [u1(x)y1(x) + u2(x)y2(x)] = Q(x)
acomodando terminos:
u1(x)
=0︷ ︸︸ ︷[a2y
′′1 (x) + a1y
′1(x) + a0y1(x)] + u2(x)
=0︷ ︸︸ ︷[a2y
′′2 (x) + a1y
′2(x) + a0y2(x)] +
a2 [u′1(x)y′1(x) + u′2(x)y′2(x)] + a2 [u′1(x)y1(x) + u′2(x)y2(x)]′+ a1 [u′1(x)y1(x) + u′2(x)y2(x)] = Q(x)
Es claro que lo que tenemos es una ecuacion con dos incognitas: u′1(x) y u′2(x), pero como buscamos unasolucion particular podemos tomar de esta ultima ecuacion el siguiente caso:
u′1(x)y1(x) + u′2(x)y2(x) = 0
u′1(x)y′1(x) + u′2(x)y′2(x) =Q(x)
a2
(7.12)
247

Borra
dor Pre
limin
ar
7.2. LINEALES NO HOMOGENEAS CON COEFICIENTES CONSTANTES
La solucion de este sistema resulta ser:
u′1(x) =
∣∣∣∣ 0 y2Q(x)a2
y′2
∣∣∣∣∣∣∣∣ y1 y2
y′1 y′2
∣∣∣∣ = G1(x) , u′2(x) =
∣∣∣∣ y1 0
y′1Q(x)a2
∣∣∣∣∣∣∣∣ y1 y2
y′1 y′2
∣∣∣∣ = G2(x)
Integrando y omitiendo las constantes de integracion:
u1(x) =
∫G1(x) dx , u2(x) =
∫G2(x) dx
por lo tanto, la solucion general es:
y(x) = C1 y1(x) + C2 y2(x) + u1(x) y1(x) + u2(x) y2(x) .
Si la ecuacion diferencial es de orden n, se puede demostrar que
yp(x) = u1(x)y1(x) + u2(x)y2(x) + · · ·+ un(x)yn(x) (7.13)
sera una solucion particular de la ecuacion no homogenea, donde y1(x), y2(x), . . . , yn(x) son las n solucioneslinealmente independientes de la ecuacion diferencial homogenea.
Sustituyendo la ecuacion (7.13), para la solucion particular, en la ecuacion diferencial y siguiendo elmismo procedimiento que para el caso de orden 2 se tendrıa que resolver el siguiente sistema de ecuaciones:
u′1(x)y1(x) + u′2(x)y2(x) + · · ·+ u′n(x)yn(x) = 0
u′1(x)y′1(x) + u′2(x)y′2(x) + · · ·+ u′n(x)y′n(x) = 0...
......
......
......
... =...
u′1(x)y(n−1)1 (x) + u′2(x)y
(n−1)2 (x) + · · ·+ u′n(x)y
(n−1)n (x) =
Q(x)
an
Consideremos un ejemplo, encontremos la solucion general de
y′′ − 3y′ + 2y = sen(e−x
).
Cuando se resuelve la ecuacion diferencial homogenea asociada a la ecuacion diferencial del problema se tiene
y′′ − 3y′ + 2y = 0 ⇒ yh(x) = C1ex + C2e
2x ,
por lo tanto: y1 = ex y y2 = e2x.Como ya hicimos el desarrollo para n = 2 podemos ir directamente al sistema resultante:
u′1(x)ex + u′2(x)e2x = 0
u′1(x)ex + 2u′2(x)e2x =sen (e−x)
1
Al resolver el sistema resulta:
u′1(x) =
∣∣∣∣ 0 e2x
sen (e−x) 2e2x
∣∣∣∣∣∣∣∣ ex e2x
ex 2e2x
∣∣∣∣ =−e2xsen (e−x)
e3x, u′2(x) =
∣∣∣∣ ex 0ex sen (e−x)
∣∣∣∣∣∣∣∣ ex e2x
ex 2e2x
∣∣∣∣ =exsen (e−x)
e3x
248

Borra
dor Pre
limin
ar
7.2. LINEALES NO HOMOGENEAS CON COEFICIENTES CONSTANTES
Figura 7.1: A la izquierda la solucion y(x) = 25e−4x + 3
5ex y a la derecha la solucion y(x) = C1e
−4x + C2ex
para C1 = {−1, 0, 1} y C2 = {−1, 0, 1}
Integrando por partes:
u1(x) = −∫
sen (e−x)
exdx = − cos
(e−x
), u2(x) =
∫sen (e−x)
e2xdx = −sen
(e−x
)+ e−x cos
(e−x
)La solucion particular es entonces:
yp(x) = − cos(e−x
)ex +
[−sen
(e−x
)+ e−x cos
(e−x
)]e2x = −e2xsen
(e−x
),
por lo tanto, la solucion general resulta ser
y(x) = C1ex + C2e
2x − e2xsen(e−x
)7.2.4. Ejemplos
1. La ecuaciona y′′ + b y′ + c y = 0 ⇔ a r2 + b r + c = 0
tiene asociada ese polinomio caracterıstico y sus raıces m1 y m2 condicionan la solucion de la manerasiguiente:
a) Si m1 6= m2 y m1 y m2 son reales, entonces la solucion es
y = C1em1x + C2e
m2x
b) Si m1 = m2 y m1 y m2 son reales, entonces la solucion es
y = C1em1x + C2 xe
m1x
c) Si m1 = α+ iβ con β 6= 0 y m2 = m1 = α− iβ, entonces la solucion es
y = eαx [C1 cos (βx) + C2 sen (βx)]
249

Borra
dor Pre
limin
ar
7.2. LINEALES NO HOMOGENEAS CON COEFICIENTES CONSTANTES
Figura 7.2: y(x) = C1e−x + C2 xe
−x para C1 = {−1, 0, 1} y C2 = {−1, 0, 1}
2. La ecuacion
y′′ + 3y′ − 4y = 0; y(0) = 1 ∧ y′(0) = −1 ⇔ r2 + 3r − 4 = (r + 4)(r − 1) = 0
tiene asociado ese polinomio caracterıstico y por lo tanto tiene como solucion general
y(x) = C1e−4x + C2e
x y como solucion particular y(x) =2
5e−4x +
3
5ex
En la figura 7.1 se encuentra graficada esa solucion particular. De igual modo, para distintos valoresde C1 = {−1, 0, 1} y C2 = {−1, 0, 1} tendremos las graficas representadas en la figura 7.1 ¿Cuales sonlas condiciones iniciales a las cuales corresponden esos valores de las constantes?
3. Otra ejemplo es el siguiente, dada la ecuacion
y′′ + 2y′ + y = 0; y(0) = 1 ∧ y′(0) = −1 ⇔ r2 + 2r + 1 = (r + 1)2 = 0 ,
que tiene como solucion general
y(x) = C1e−x + C2 xe
−x y como solucion particular y(x) = e−x
Para distintos valores de C1 = {−1, 0, 1} y C2 = {−1, 0, 1} tendremos las graficas representadas en lafigura 7.2. Cabe seguir preguntando ¿Cuales son las condiciones iniciales a las cuales corresponden esosvalores de las constantes?
4. Finalmente, la ecuacion
y′′ + 4y′ + 20y = 0; y(0) = 3 ∧ y′(0) = −1 ⇔ r2 + 4r + 20 = (r + 2)2 + 16 = 0
con las siguientes soluciones r = −2± 4i y por lo tanto tiene como solucion general
y(x) = e−2x [C1 cos(4x) + C2sen(4x)] ,
y como solucion particular
y(x) = e−2x
[3 cos(4x) +
5
4sen(4x)
].
250

Borra
dor Pre
limin
ar
7.2. LINEALES NO HOMOGENEAS CON COEFICIENTES CONSTANTES
Figura 7.3: A la izquierda la solucion y(x) = e−2x(3 cos 4x+ 5
4 sen4x)
y a la derecha la solucion y(x) =e−2x (C1 cos 4x+ C2sen4x) para C1 = {−1, 0, 1} y C2 = {−1, 0, 1}
La representacion grafica se encuentra en la figura 7.3 y para distintos valores de las constantes. Aligual que en los casos anteriores, para distintos valores de las constantes de integracion, tendremos lasgraficas de la figura 7.3
5. Otro ejemplo interesante es la ecuacion inhomogenea de Cauchy1-Euler2
a0 y(x) + a1 x y′(x) + · · ·+ an x
n y(n)(x) = F(x)
con los ai = ctes, puede ser resuelta por este metodo. Consideremos una ecuacion de orden 2
c y(x) + b x y′(x) + a x2 y′′(x) = F(x)
La solucion de la homogenea se propone como yh = xm por lo tanto
c y(x) + b x y′(x) + a x2 y′′(x) = 0c xm + b x mxm−1 + a x2 m(m− 1)xm−2 = 0
xm (c+ bm+ am(m− 1)) = 0
por lo tantoam2 + (b− a)m+ c = 0
con
m =−(b− a)±
√(b− a)2 − 4ac
2a
por lo tanto
a) Si m1 6= m2 y ambas reales, entonces la solucion de la homogenea sera
yh = C1xm1 + C2x
m2
1Louis Augustin Baron de Cauchy (1789-1857). Matematico frances, uno de los creadores del analisis matematicomoderno. Estudio, entre otras cuestiones, los criterios de convergencia de series, las funciones de variable compleja y los sistemasde ecuaciones diferenciales
2Leonhard Euler (1707-1783). Matematico suizo. Destaco en el estudio de diversas cuestiones del calculo logarıtmico ydiferencial, ası como de las series algebraicas y la trigonometrıa.
251

Borra
dor Pre
limin
ar
7.2. LINEALES NO HOMOGENEAS CON COEFICIENTES CONSTANTES
b) Si m1 = m2 y ambas reales, entonces la solucion de la homogenea sera
yh = xm1 (C1 + C2 lnx)
c) Si m1 = m2 = α+ iβ , entonces la solucion de la homogenea sera
yh = xα (C1 cos(β lnx) + C2 sen(β lnx))
Ahora para lograr la solucion de la inhomogenea suponemos el caso m1 6= m2 por lo tanto
y1h = xm1 y2h = xm2
u′1 =
∣∣∣∣ 0 xm2
F(x)a x2 m2 x
m2−1
∣∣∣∣∣∣∣∣ xm1 xm2
m1 xm1−1 m2 x
m2−1
∣∣∣∣ =
∣∣∣∣ 0 xm2
F(x)a x2 m2 x
m2−1
∣∣∣∣W (y1, y2)
= G1(x)
u′2 =
∣∣∣∣ xm1 0
m1 xm1−1 F(x)
a x2
∣∣∣∣∣∣∣∣ xm1 xm2
m1 xm1−1 m2 x
m2−1
∣∣∣∣ =
∣∣∣∣ xm1 0
m1 xm1−1 F(x)
a x2
∣∣∣∣W (y1, y2)
= G2(x)
La siguiente ecuacion diferencial
x2y′′ − xy′ + 5y =1
x
tiene como solucion de la homogenea
yh = x (C1 cos(2 lnx) + C2 sen(2 lnx))
la solucion particular por el metodo de variacion de los parametros queda como
yp = u1(x) yh1 + u2(x) yh2
calculando los coeficientes respectivos en donde el Wronskiano
W (x cos(2 lnx); x sen(2 lnx)) = 2x
por lo cual los coeficientes quedan
u1 =
∫G1(x) dx =
∫xsen(2 lnx) 1
x
2xdx =
1
4cos(2 lnx)
u2 =
∫G2(x) dx =
∫x cos(2 lnx) 1
x
2xdx =
1
4sen(2 lnx)
finalmente las solucion particular sera
yp = x
(1
4cos2(2 lnx) +
1
4sen2(2 lnx)
)=
1
4x
y la general
y = x (C1 cos(2 lnx) + C2 sen(2 lnx)) +1
4x
252

Borra
dor Pre
limin
ar
7.3. LINEALES NO HOMOGENEAS CON COEFICIENTES NO CONSTANTES
7.2.5. Practicando con Maxima
7.2.6. Ejercicios
7.3. Lineales no homogeneas con coeficientes no constantes
Ahora vamos a desarrollar un metodo para resolver ecuaciones diferenciales lineales:
fn(x)y(n)(x) + fn−1(x)y(n−1)(x) + · · ·+ f2(x)y′′(x) + f1(x)y′(x) + f0(x)y(x) = Q(x) , (7.14)
donde f0(x), f1(x), . . . , fn(x) y Q(x) son funciones continuas de x en un intervalo comun I, ademas fn(x) 6= 0.
7.3.1. Metodo de reduccion del orden
Para aplicar este metodo, primero que todo, debemos poder encontrar una solucion (no trivial) de laecuacion diferencial homogenea asociada a (7.14)
fn(x)y(n)(x) + fn−1(x)y(n−1)(x) + · · ·+ f2(x)y′′(x) + f1(x)y′(x) + f0(x)y(x) = 0 . (7.15)
Consideremos, por simplicidad, el caso n = 2:
f2(x)y′′(x) + f1(x)y′(x) + f0(x)y(x) = Q(x) . (7.16)
y sea y1(x) una solucion (no trivial) de la ecuacion diferencial homogenea asociada a (7.16):
f2(x)y′′(x) + f1(x)y′(x) + f0(x)y(x) = 0 . (7.17)
El metodo permitira encontrar una segunda solucion de la ecuacion homogenea y tambien una solucionparticular de (7.16).
Sea y2(x) una segunda solucion de la ecuacion diferencial homogenea y vamos a suponer que tiene laforma
y2(x) = y1(x)
∫u(x)dx , (7.18)
donde u(x) es una funcion a determinar. Por lo tanto:
y′2(x) = y1(x)u(x) + y′1(x)
∫u(x)dx (7.19)
y′′2 (x) = y1(x)u′(x) + 2y′1(x)u(x) + y′′1 (x)
∫u(x)dx (7.20)
sustituyendo en (7.17) resulta:
f2(x)
[y1(x)u′(x) + 2y′1(x)u(x) + y′′1 (x)
∫u(x)dx
]+ f1(x)
[y1(x)u(x) + y′1(x)
∫u(x)dx
]+f0(x)
[y1(x)
∫u(x)dx
]= 0
[f2(x)y′′1 (x) + f1(x)y′1(x) + f0(x)y1(x)]
∫u(x)dx+ f2(x)y1(x)u′(x) + [2f2(x)y′1(x) + f1(x)y1(x)]u(x) = 0
Como el primer termino de la ultima ecuacion es identicamente igual a cero, entonces:
f2(x)y1(x)u′(x) + [2f2(x)y′1(x) + f1(x)y1(x)]u(x) = 0 , (7.21)
253

Borra
dor Pre
limin
ar
7.3. LINEALES NO HOMOGENEAS CON COEFICIENTES NO CONSTANTES
acomodando terminos
du
u+ 2
dy1(x)
y1(x)= −f1(x)
f2(x)dx ⇒
∫du
u+ 2
∫dy1(x)
y1(x)= −
∫f1(x)
f2(x)dx
esto es:
ln |u(x)|+ 2 ln |y1(x)| = −∫f1(x)
f2(x)dx
ln |u(x)(y1(x))2| = −∫f1(x)
f2(x)dx
u(x)(y1(x))2 = exp
[−∫f1(x)
f2(x)dx
]u(x) =
1
(y1(x))2exp
[−∫f1(x)
f2(x)dx
]Por lo tanto, si logramos integrar esta ultima ecuacion estaremos encontrando una segunda solucion
linealmente independiente de (7.17):
y2(x) = y1(x)
∫1
(y1(x))2exp
[−∫f1(x)
f2(x)dx
]dx . (7.22)
Consideremos el siguiente ejemplo para encontrar la solucion general de
x2y′′ + xy′ − y = 0 ,
donde y1 = x es una solucion de la ecuacion diferencial y x 6= 0.Como esta ecuacion es de orden 2, podemos ir directamente a la ecuacion (7.22) en lugar de hacer el
desarrollo nuevamente, esto es:
y2(x) = x
∫1
x2exp
[−∫
x
x2dx
]dx = x
∫1
x2exp [− ln |x|] dx = x
∫1
x3dx = − 1
2x
por lo tanto:
yh(x) = C1x+ C21
x.
Si queremos encontrar una solucion particular de la ecuacion no homogenea (7.16), tambien podemosutilizar la solucion de prueba (7.18). Repitiendo los calculos que nos llevaron a la ecuacion (7.21) resultaraque ahora tenemos:
f2(x)y1(x)u′(x) + [2f2(x)y′1(x) + f1(x)y1(x)]u(x) = Q(x)
u′(x) +
[2y′1(x)
y1(x)+f1(x)
f2(x)
]u(x) =
Q(x)
f2(x)y1(x)(7.23)
y esta ecuacion es simplemente una ecuacion diferencial lineal de primer orden para u(x). Esto significa quedebemos encontrar el factor integrador
µ(x) = exp
(∫ [2y′1(x)
y1(x)+f1(x)
f2(x)
]dx
)
254

Borra
dor Pre
limin
ar
7.3. LINEALES NO HOMOGENEAS CON COEFICIENTES NO CONSTANTES
para luego escribir la solucion:
u(x) =1
µ(x)
∫µ(x)
Q(x)
f2(x)y1(x)dx+
C
µ(x). (7.24)
Consideremos otro ejemplo para encontrar la solucion de
x2y′′ + xy′ − y = x ,
En el ejemplo anterior vimos que la ecuacion homogenea tiene dos soluciones linealmente independientes:
x2y′′ + xy′ − y = 0 ⇒ y1(x) = x , y2(x) = x−1
Podemos entonces proponer la siguiente solucion particular para la ecuacion diferencial no homogenea:
yp(x) = x
∫u(x)dx ,
En lugar de repetir los calculos que consisten en derivar yp(x) un par de veces y sustituir en la ecuaciondiferencial problema, podemos ir directamente al grano pues ya sabemos el resultado, esto es, la ecuacion(7.23):
u′(x) +
[2
1
x+
x
x2
]u(x) =
x
x3⇒ u′(x) +
3
xu(x) =
1
x2
el factor integrador para esta ecuacion es
µ(x) = e∫
3xdx = eln |x|3 = x3
por lo tanto:
u(x) =1
x3
∫x3
x2dx+
C
x3⇒ u(x) =
1
x3
∫xdx+
C
x3⇒ u(x) =
1
x3
x2
2+C
x3
Como lo que queremos es una solucion particular podemos omitir la constante de integracion:
u(x) =1
2x
y la solucion particular es entonces
yp(x) = x
∫1
2xdx =
x
2ln |x|
La solucion general de la ecuacion diferencial resulta ser:
y(x) = C1x+ C2x−1 +
x
2ln |x| .
7.3.2. La ecuacion de Euler
La ecuacion inhomogenea de Cauchy3-Euler4 es la siguiente
anxny(n)(x) + an−1x
n−1y(n−1)(x) + · · ·+ a1xy′(x) + a0y(x) = Q(x) (7.25)
3Louis Augustin Baron de Cauchy (1789-1857). Matematico frances, uno de los creadores del analisis matematicomoderno. Estudio, entre otras cuestiones, los criterios de convergencia de series, las funciones de variable compleja y los sistemasde ecuaciones diferenciales.
4Leonhard Euler (1707-1783). Matematico suizo. Destaco en el estudio de diversas cuestiones del calculo logarıtmico ydiferencial, ası como de las series algebraicas y la trigonometrıa.
255

Borra
dor Pre
limin
ar
7.3. LINEALES NO HOMOGENEAS CON COEFICIENTES NO CONSTANTES
donde los ai son constantes. Esta ecuacion puede ser resuelta por el metodo que se describe a continuacion.Consideremos, por razones de simplicidad, una ecuacion de orden 2:
a2x2y′′(x) + a1xy
′(x) + a0y(x) = Q(x) .
Propondremos que la ecuacion homogenea tiene como solucion una funcion de la forma: y = xm, esto es:
a2x2y′′(x) + a1xy
′(x) + a0y(x) = 0a2x
2m(m− 1)xm−2 + a1xmxm−1 + a0x
m = 0xm [a2m(m− 1) + a1m+ a0] = 0
por lo tanto
a2m2 + (a1 − a2)m+ a0 = 0 ⇒ m =
−(a1 − a2)±√
(a1 − a2)2 − 4a2a0
2a2.
Esto significa que se pueden presentar los siguientes casos:
1. Si m1 6= m2 y ambas reales, entonces la solucion de la homogenea sera
yh = C1xm1 + C2x
m2
2. Si m1 = m2 = m y ambas reales, entonces la solucion de la homogenea sera
yh = xm (C1 + C2 ln |x|)
3. Si m1 = m2 = α+ iβ , entonces la solucion de la homogenea sera
yh = xα [C1 cos(β ln |x|) + C2 sen(β ln |x|)] .
Para buscar la solucion de la ecuacion inhomogenea vamos a suponer el caso m1 6= m2, por lo tanto,tomaremos como punto de partida las dos soluciones linealmente independientes de la ecuacion homogenea:
y1 = xm1 y2 = xm2 .
Podemos aplicar el metodo de variacion de parametros que vimos anteriormente. (Queda como ejerciciorepetir los calculos que llevaron al sistema (7.12)). Por lo tanto, en nuestro caso resulta que
u′1 =
∣∣∣∣∣∣0 xm2
Q(x)
a2x2m2x
m2−1
∣∣∣∣∣∣∣∣∣∣ xm1 xm2
m1xm1−1 m2x
m2−1
∣∣∣∣ = G1(x) , u′2 =
∣∣∣∣∣∣xm1 0
m1xm1−1 Q(x)
a2x2
∣∣∣∣∣∣∣∣∣∣ xm1 xm2
m1xm1−1 m2x
m2−1
∣∣∣∣ = G2(x)
Consideremos el siguiente ejemplo.
x2y′′ − xy′ + 5y =1
x
tiene como solucion de la homogenea:
yh = x [C1 cos(2 ln |x|) + C2 sen(2 ln |x|)] ,
256

Borra
dor Pre
limin
ar
7.3. LINEALES NO HOMOGENEAS CON COEFICIENTES NO CONSTANTES
la solucion particular por el metodo de variacion de los parametros queda como
yp = u1(x) y1 + u2(x) y2 ,
calculando los coeficientes respectivos, en donde el Wronskiano es:
W [x cos(2 ln |x|) ; x sen(2 ln |x|)] =
∣∣∣∣ x cos(2 ln |x|) x sen(2 ln |x|)cos(2 ln |x|)− 2 sen(2 ln |x|) sen(2 ln |x|) + 2 cos(2 ln |x|)
∣∣∣∣ = 2x ,
resulta:
u1 =
∫G1(x) dx =
∫sen(2 ln |x|)
2xdx =
1
4cos(2 ln |x|) ,
u2 =
∫G2(x) dx =
∫cos(2 ln |x|)
2xdx =
1
4sen(2 ln |x|) ,
finalmente las solucion particular sera
yp = x
(1
4cos2(2 ln |x|) +
1
4sen2(2 ln |x|)
)=
1
4x ,
por lo tanto, la solucion general es:
y = x [C1 cos(2 ln |x|) + C2 sen(2 ln |x|)] +1
4x .
La ecuacion de Euler puede representarse de una manera mas general:
a0y(x) + a1(x− x0)y′(x) + · · ·+ an(x− x0)ny(n)(x) = Q(x) , (7.26)
donde x0 tambien es una constante. El siguiente cambio de variable:
x− x0 = eu ⇒ u = ln(x− x0)
transforma la ecuacion de Euler en una ecuacion lineal con coeficientes constantes. Para ver esto, consideremosel caso n = 3, es decir:
a0y(x) + a1(x− x0)y′(x) + a2(x− x0)2y′′(x) + a3(x− x0)3y′′′(x) = Q(x) . (7.27)
Notemos que:
dy
du=
dy
dx
dx
du= (x− x0)
dy
dx
d2y
du2− dy
du= (x− x0)2 d2y
dx2
d3y
du3− 3
d2y
du2+ 2
dy
du= (x− x0)3 d3y
dx3,
al sustituir en la ecuacion (7.27) resulta:
a0y(u) + a1(x− x0)
[1
(x− x0)
dy
du
]+ a2(x− x0)2
[1
(x− x0)2
{d2y
du2− dy
du
}]+ a3(x− x0)3
[1
(x− x0)3
{d3y
du3− 3
d2y
du2+ 2
dy
du
}]= Q(u)
a0y(u) + a1dy
du+ a2
{d2y
du2− dy
du
}+ a3
{d3y
du3− 3
d2y
du2+ 2
dy
du
}= Q(u) ,
257

Borra
dor Pre
limin
ar
7.3. LINEALES NO HOMOGENEAS CON COEFICIENTES NO CONSTANTES
factorizando:
a0y(u) + (a1 − a2 + 2a3)dy
du+ (a2 − 3a3)
d2y
du2+ a3
d3y
du3= Q(u) .
Esta ultima es una ecuacion diferencial lineal con coeficientes constantes que ya sabemos resolver.
7.3.3. Ejemplos
7.3.4. Practicando con Maxima
7.3.5. Ejercicios
1. Si yp(x) =[
110 cos(x)− 3
10 sen(x)]+i[
110 sen(x) + 3
10 cos(x)]
es una solucion particular de y′′−3y′+2y =eix. Encuentre una solucion particular de:
a) y′′ − 3y′ + 2y = cos(x).
b) y′′ − 3y′ + 2y = sen(x).
Verifique la validez de los resultados.
2. Demuestre que la solucion yh(x) = eax [C1 cos(bx) + i C2 sen(bx)] se puede escribir de alguna de lassiguientes formas:
yh(x) = Ceaxsen(bx+D) o yh(x) = Ceaxsen(bx−D)
donde C y D son constantes.
3. Resuelva las siguientes ecuaciones diferenciales
a) y′′ + 2y = 0
b) y′′ − 3y + 2y = 0
c) y′′ − y = 0
d) y′′′ + y′′ − 6y′ = 0
e) y′′ + 3y + 2y = 4
f ) y′′ + 3y + 2y = 12ex
g) y′′ + 3y + 2y = sen(x)
h) y′′ + 3y + 2y = cos(x)
i) y′′ + 3y + 2y = 8 + 6ex + 2sen(x)
j ) y′′ − 3y′ + 2y = 2xe3x + 3sen (x)
4. Resuelva las siguientes ecuaciones diferenciales por variacion de parametros
a) y′′ + 4y′ + 4y = 3xe−2x
b) y′′ + y′ = tan(x) , −π2 < x < π2
5. Resuelva las siguientes ecuaciones diferenciales por el metodo de reduccion de orden.
a) x2y′′ + xy′ − 4y = x3 , y1(x) = x2
b) x2y′′ + xy′ − y = x2e−x , y1(x) = x
6. Resuelva las siguientes ecuaciones de Euler
258

Borra
dor Pre
limin
ar
7.3. LINEALES NO HOMOGENEAS CON COEFICIENTES NO CONSTANTES
a) (x− 3)2y′′ + (x− 3)y′ + y = x, x 6= 3
b) x2y′′ + xy′ = 0, x 6= 0
c) x3y′′′ + 2x2y′′ − xy′ + y = x, x 6= 0
7. Resuelva utilizando el metodo de variacion de parametros y verifique los resultados
a) y′′ + y = sec(x)
b) y′′ + y = sec3(x)
c) y′′ + 3y′ + 2y = 12ex
d) y′′ + y = 4xsen(x)
e) x2y′′ − xy′ + y = x, y1h = x, y2h = x ln(x)
f ) y′′ − 2xy′ + 2
x2 y = x ln(x), y1h = x, y2h = x2
g) x2y′′ + xy′ − 4y = x3, y1h = x2, y2h = x−2
8. Resuelva utilizando el metodo de reduccion del orden y verifique los resultados
a) x2y′′ − xy′ + y = 0, y1h = x
b) y′′ − 2xy′ + 2
x2 y = 0, y1h = x
c) (2x2 + 1)y′′ − 4xy′ + 4y = 0, y1h = x
d) 2x2y′′ + 3xy′ − y = 0, y1h = x1/2
e) x2y′′ + xy′ − 4y = x3, y1h = x2
f ) y′′ + (x2 − 1)y′ − x2y = 0, y1h = ex
g) x2y′′ − 2y = 2x2, y1h = x2
9. Demuestre que las siguientes sustituciones
y = e∫y1(x)dx , y′ = y1(x)e
∫y1(x)dx , y′′ = y2
1(x)e∫y1(x)dx + y′1(x)e
∫y1(x)dx ,
transforman la ecuacion linealf2(x)y′′ + f1(x)y′ + f0(x)y = 0
en la siguiente ecuacion de Riccati:
y′1 = −f0(x)
f2(x)− f1(x)
f2(x)y1 − y2
1
donde, si y1(x) es solucion de la ecuacion de Riccati, entonces y = e∫y1(x)dx es solucion de la ecuacion
lineal. Aplique las sustituciones anteriores para trasformar la ecuacion
xy′′ − y′ − x3y = 0.
en una ecuacion de Riccati y trate de resolver estas dos ecuaciones.
259

Borra
dor Pre
limin
ar
7.4. EL OPERADOR DIFERENCIAL Y LAS ECUACIONES DIFERENCIALES
7.4. El operador diferencial y las ecuaciones diferenciales
7.4.1. El operador diferencial
Un operador es un objeto matematico que convierte una funcion en otra, por ejemplo, el operadorderivada convierte una funcion en una funcion diferente llamada la funcion derivada. Podemos definir eloperador derivada D que al actuar sobre una funcion diferenciable produce la derivada de esta, esto es:
D0f(x) = f(x) , D1f(x) = f ′(x) , D2f(x) = f ′′(x) , . . . ,Dnf(x) = f (n)(x) .
Es posible construir la siguiente combinacion lineal con los operadores diferenciales:
P (D) = a0 + a1D + a2D2 + · · ·+ anDn , an 6= 0 . (7.28)
donde a2, a1, a2, . . . an son constantes. A este nuevo objeto lo podemos llamar el operador polinomial de ordenn.
La utilidad de este objeto matematico quedara clara si hacemos la siguiente definicion
P (D)y ≡(anDn + an−1D
n−1 + · · ·+ a2D2 + a1D + a0
)y
= anDny + an−1Dn−1y + · · ·+ a2D
2y + a1Dy + a0y
= any(n) + an−1y
(n−1) + · · ·+ a2y′′ + a1y
′ + a0y . (7.29)
Por otro lado, recordemos que una ecuacion diferencial lineal de orden n con coeficientes constantes esuna ecuacion de la forma
any(n) + an−1y
(n−1) + · · ·+ a2y′′ + a1y
′ + a0y = Q(x) , (7.30)
por lo tanto, (7.30) se puede escribir de una manera compacta como
P (D)y = Q(x) . (7.31)
El operador polinomial es lineal, esto significa que tiene las siguientes propiedades
Si f1(x) y f2(x) son dos funciones diferenciables de orden n, entones
P (D) [αf1(x) + βf2(x)] = αP (D)f1(x) + βP (D)f2(x)
donde α y β son constantes. Ademas:
Si y1(x), y2(x), . . . , yn(x) son n soluciones de la ecuacion diferencial homogenea P (D)y = 0 entoncesyh(x) = C1y1(x) + C2y2(x) + · · ·+ Cnyn(x) es tambien una solucion.
Si yh(x) es una solucion de P (D)y = 0 y yp(x) es una solucion de P (D)y = Q(x) entonces y(x) =yh(x) + yp(x) es una solucion de P (D)y = Q(x).
Si yp1(x), yp2(x), . . . , ypn(x) son soluciones particulares de las respectivas n ecuaciones
P (D)y = Q1(x), P (D)y = Q2(x), . . . , P (D)y = Qn(x)
resulta entonces que
P (D) [yp1(x) + yp2(x) + · · ·+ ypn(x)] = Q1(x) +Q2(x) + · · ·+Qn(x)
implica queyp(x) = yp1(x) + yp2(x) + · · ·+ ypn(x)
es una solucion deP (D)y = Q1(x) +Q2(x) + · · ·+Qn(x)
260

Borra
dor Pre
limin
ar
7.4. EL OPERADOR DIFERENCIAL Y LAS ECUACIONES DIFERENCIALES
Por ejemplo, encontremos una ecuacion particular de
y′′ + y = x2 + xe2x + 3 ⇒(D2 + 1
)y = x2 + xe2x + 3 .
Por alguno de los metodos anteriormente vistos podemos encontrar las soluciones particulares de cadauna de las siguientes ecuaciones(
D2 + 1)y = x2 ,
(D2 + 1
)y = xe2x ,
(D2 + 1
)y = 3
las soluciones son, respectivamente
yp1(x) = x2 − 2 , yp2(x) =1
5
(xe2x − 4
5e2x
), yp3(x) = 3
por lo tanto, una solucion particular de la ecuacion diferencial problema es
yp(x) = x2 − 2 +1
5
(xe2x − 4
5e2x
)+ 3 = x2 + 1 +
1
5
(xe2x − 4
5e2x
).
Al operador diferencial tambien se le pueden agregar las siguientes propiedades. Consideremos los ope-radores
P1(D) = anDn + an−1Dn−1 + · · ·+ a2D
2 + a1D + a0 (7.32)
P2(D) = bnDn + bn−1Dn−1 + · · ·+ b2D
2 + b1D + b0 (7.33)
con n ≥ m.
(P1+P2)f(x) = P1f(x)+P2f(x) =[anDn + · · ·+ anDn + · · ·+ (a2 + b2)D2 + (a1 + b1)D + a0 + b0
]f(x)
[g(x)P (D)] f(x) = g(x) [P (D)f(x)]
g(x) [P1(D) + P2(D)] f(x) = g(x) [P1(D)f(x)] + g(x) [P2(D)f(x)]
[P1(D)P2(D)] f(x) = P1(D) [P2(D)f(x)]
Si el operador polinomial diferencial puede ser factorizado, es decir, si:
P (D) = anDn + an−1Dn−1 + · · ·+ a2D
2 + a1D + a0 = an(D−m1)(D−m2) · · · (D−mn) ,
las cantidades: m1,m2, . . . ,mn son las raices de la ecuacion caracterıstica de P (D)y = 0.
SiP (D) = anDn + an−1D
n−1 + · · ·+ a2D2 + a1D + a0 ,
es un operador polinomial de orden n, entonces:
P (D + a) = an (D + a)n
+ an−1 (D + a)n−1
+ · · ·+ a2 (D + a)2
+ a1 (D + a) + a0
donde a es una constante.
Por ejemplo:
(D− 2D− 3)[sen(x) + x2
]= (D + 1)(D− 3)
[sen(x) + x2
]= (D + 1)
[(D− 3)
[sen(x) + x2
]]= (D + 1)
[cos(x) + 2x− 3sen(x)− 3x2
]= −sen(x) + 2− 3 cos(x)− 6x+ cos(x) + 2x− 3sen(x)− 3x2
= −4sen(x)− 2 cos(x)− 3x2 − 4x+ 2
261

Borra
dor Pre
limin
ar
7.4. EL OPERADOR DIFERENCIAL Y LAS ECUACIONES DIFERENCIALES
Teorema: SiP (D) = anDn + an−1D
n−1 + · · ·+ a2D2 + a1D + a0
es un operador polinomial diferencial con coeficientes constantes y u(x) es una funcion n veces diferen-ciable, entonces:
P (D) [ueax] = eaxP (D + a)u ,
donde a es una constante.
Vamos a evaluar la siguiente expresion(D2 −D + 3
) (x3e−2x
)Al comparar la forma de esta expresion con la de teorema anterior, vemos que a = −2 y u(x) = x3.
Por lo tanto, si hacemos
P (D− 2) = (D− 2)2 − (D− 2) + 3 = D2 − 5D + 9
se obtiene que(D2 −D + 3
) (x3e−2x
)= e−2x (D− 2)x3 = e−2x
(D2 − 5D + 9
)x3 = e−2x
(9x3 − 15x2 + 6x
).
7.4.2. Solucion de ecuaciones diferenciales lineales con el operador polinomial
El metodo puede aplicarse a ecuaciones diferenciales de orden n, ya que si se tiene que
(D−m1)(D−m2) · · · (D−mn)y = Q(x) ,
entonces se puede definir la funcion u como
u = (D−m2) · · · (D−mn)y ,
y lo que queda es resolver una ecuacion diferencial lineal de primer orden
(D−m1)u = Q(x) .
Una vez resuelta la ecuacion para u se sustituye en:
(D−m2)(D−m3) · · · (D−mn)y = u(x)
Repitiendo el proceso,v = (D−m3) · · · (D−mn)y ⇒ (D−m2)v = u(x)
Integrando:(D−m3) · · · (D−mn)y = v(x)
Esta repeticion nos llevara entonces hasta la solucion y(x).Para resolver ecuaciones del tipo
any(n) + an−1y
(n−1) + · · ·+ a2y′′ + a1y
′ + a0y = Q(x) , an 6= 0 ,
es decir, con coeficientes constantes, vamos a estudiar el siguiente ejemplo:Consideremos el siguiente ejemplo:
y′′′ + 2y′′ − y′ − 2y = e2x .
262

Borra
dor Pre
limin
ar
7.4. EL OPERADOR DIFERENCIAL Y LAS ECUACIONES DIFERENCIALES
Al escribir esta ecuacion utilizando el operador diferencial resulta(D3 + 2D2 −D− 2
)y = e2x ⇒ (D− 1) (D + 1) (D + 2) y = e2x
Si llamamos u = (D + 1) (D + 2) y entonces se puede ver que
(D− 1)u = e2x ⇒ u′ − u = e2x ⇒ u = e2x + C1ex
Conocida la funcion u entonces se tiene que
(D + 1) (D + 2) y = e2x + C1ex
Repetimos el proceso, pero ahora hacemos v = (D + 2) y, por lo tanto
(D + 1) v = e2x + C1ex ⇒ v′ + v = e2x + C1e
x ⇒ v =1
3e2x +
C1
2ex + c2e
−x
Conocida v, entonces
(D + 2) y =1
3e2x +
C1
2ex + c2e
−x
Integrando una vez mas:
y′ + 2y =1
3e2x +
C1
2ex + c2e
−x ⇒ y(x) =1
12e2x + C1e
x + c2e−x + C3e
−2x .
Notemos que existe una manera bastante sencilla de resolver la ecuacion combinando varios metodos. Sibuscamos yh(x) a traves de la ecuacion caracterıstica se obtiene que la solucion es: yh(x) = C1e
x + c2e−x +
C3e−2x. Ahora bien, una solucion particular se obtiene al considerar u(x) = e2x entonces v = 1
3e2x y por lo
tanto yp(x) = 112e
2x.
7.4.3. El operador inverso
Los operadores suelen tener su inversa, esto significa que si
P (D)y = Q(x) ⇒ P−1(D)P (D)y = P−1(D)Q(x) ⇒ yp = P−1(D)Q(x) ,
donde yp(x) es una solucion particular de P (D)y = Q(x). Notemos que esto significa que
D−nQ(x) =
∫ ∫· · ·︸︷︷︸
n veces
∫Q(x)dx .
Por ejemplo, evaluarD−2(2x+ 3) .
Se tiene entonces lo siguiente:
D−2(2x+ 3) = D−1
∫(2x+ 3)dx = D−1(x2 + 3x) =
∫(x2 + 3x)dx =
1
3x3 +
3
2x2 .
De todos modos es facil verificar que yp = 13x
3 + 32x
2 es una solucion particular de D2y = 2x+ 3.El operador inversa de P (D), es decir P−1(D), puede tambien representarse como 1/P (D). Debe quedar
claro que su significado radica en el hecho de que al actuar sobre Q(x) produce una solucion particular yp.
263

Borra
dor Pre
limin
ar
7.4. EL OPERADOR DIFERENCIAL Y LAS ECUACIONES DIFERENCIALES
Esta ultima notacion resulta ser a veces mas conveniente y dependiendo de la forma de Q(x) puede resultaralgunas veces de facil solucion.
En general, se tiene que sı
P (D)y =(anDn + an−1D
n−1 + · · ·+ a1D + a0
)y = Q(x) ,
entonces
yp =1
P (D)[Q(x)] =
1
a0
(1 + a1
a0D + a2
a0D2 + · · ·+ an−1
a0Dn−1 + an
a0Dn) [Q(x)]
=1
a0
(1 + c1D + c2D
2 + · · ·+ cn−1Dn−1 + cnDn
)[Q(x)] , a0 6= 0 ,
donde el termino(1 + c1D + c2D
2 + · · ·+ cn−1Dn−1 + cnDn
)/a0 es la expansion en serie de 1/P (D).
Por otro lado, notemos que si a0 = 0, entonces
P (D)y =(anDn + an−1D
n−1 + · · ·+ a1D)y = D
(anDn−1 + an−1D
n−2 + · · ·+ a1
)y = Q(x) ,
Si ambos a0 = 0 y a1 = 0, entonces se puede seguir factorizando. Por lo tanto, en general:
P (D)y = Dr(anDn−r + · · ·+ ar+1D + ar
)y = Q(x) .
esto significa que
yp =1
P (D)[Q(x)] =
1
Dr (anDn−r + · · ·+ ar+1D + ar)[Q(x)] ar 6= 0
=1
Dr
[1
(anDn−r + · · ·+ ar+1D + ar)[Q(x)]
]Muchos calculos se simplificaran notablemente por la forma que pueda tener la funcion Q(x), por ejemplo,
si Q(x) = bxk, entoncesP (D)y = bxk .
Note que si k = 0, entonces:
yp =1
P (D)[b] =
b
a0, a0 6= 0 .
porque b es constante.Encontremos una solucion particular de
y′′ − 2y′ − 3y = 5 ⇒ (D2 − 2D− 3)y = 5 ,
aquı podemos ver que: a0 = −3, a1 = −2, a2 = 1, b = 5 y k = 0, y por lo tanto:
yp =1
P (D)[5] = −5
3.
7.4.4. El operador polinomial inverso y fracciones parciales
La mejor manera de ilustrar el metodo es con un ejemplo. Consideremos la siguiente ecuacion diferencial:
y′′′ − 5y′′ + 8y′ − 4y = 2e4x ⇒(D3 − 5D2 + 8D − 4
)y = 2e4x .
264

Borra
dor Pre
limin
ar
7.4. EL OPERADOR DIFERENCIAL Y LAS ECUACIONES DIFERENCIALES
Busquemos su solucion general.Podemos notar que
D3 − 5D2 + 8D − 4 = (D − 2)2(D − 1) ,
por lo tanto
yp = P−1(D) [Q(x)] =1
P (D)
[2e4x
]=
1
D3 − 5D2 + 8D − 4
[2e4x
]=
1
(D − 2)2(D − 1)
[2e4x
]podemos hacer una expansion en fracciones parciales
1
(D − 2)2(D − 1)=
1
D − 1− 1
D − 2+
1
(D − 2)2
por lo tanto:
yp =1
D − 1
[2e4x
]− 1
D − 2
[2e4x
]+
1
(D − 2)2
[2e4x
].
Ahora estamos en capacidad de resolver cada termino por separado:
yp =2e4x
3− 2e4x
2+
2e4x
4=e4x
6.
Par otro lado, la familia de soluciones de la ecuacion homogenea es
yh = (C1 + C2x)e2x
y la solucion general resulta ser entonces:
y(x) = (C1 + C2x)e2x +e4x
6.
7.4.5. Ejemplos
1. Encontrar una solucion particular de
4y′′ − 3y′ + 9y = 5x2 ⇒ (4D2 − 3D + 9)y = 5x2 ,
ahora: a0 = 9, a1 = −3, a2 = 4, b = 5 y k = 2, esto significa que:
yp =1
P (D)
[5x2]
=1
9(1− 3
9D + 49D2
) [5x2]
=5
9
(1 +
1
3D− 1
3D2
)[x2]
=5
9
[x2 +
2
3x− 2
3
].
Cuando se hace la expansion en serie de 1/P (D) no hace falta ir mas alla de D3, ya que D3[x2]
= 0.
2. Encontrar una solucion particular de
y(5) − y(3) = 2x2 ⇒ (D5 −D3)y = 2x2 ⇒ D3(D2 − 1)y = 2x2
por lo tanto:
yp =1
P (D)
[2x2]
=1
D3
[1
D2 − 1
[2x2]].
Trabajamos por partes,1
D2 − 1
[2x2]
=1
(−1) (1−D2)
[2x2],
265

Borra
dor Pre
limin
ar
7.4. EL OPERADOR DIFERENCIAL Y LAS ECUACIONES DIFERENCIALES
aquı a0 = −1, a1 = 0, a2 = 1, b = 2 y k = 2, por lo tanto
1
D2 − 1
[2x2]
= −21
(1−D2)
[x2]
= −2(1 + D2
) [x2]
= −2(x2 + 2)
ahora tenemos que
yp =1
D3
[−2(x2 + 2)
]= −2D−3
[x2 + 2
]= −2
(x5
60+x3
3
).
3. Si Q(x) = beax, entoncesP (D)y = beax
Se puede demostrar (queda como ejercicio) que una solucion particular de esta ecuacion es
yp =1
P (D)[beax] =
beax
P (a), P (a) 6= 0 .
Encuentremos una solucion particular de
y′′′ − y′′ + y′ + y = 3e−2x .
Entonces(D3 −D2 + D + 1)y = 3e−2x ,
aquı b = 3 y a = −2, por lo tanto:
yp =1
P (D)
[3e−2x
]=
3e−2x
P (−2)=
3e−2x
(−2)3 − (−2)2 + (−2) + 1= − 3
13e−2x ,
4. Si Q(x) = b cos(ax) o Q(x) = b sen(ax). En este caso podemos utilizar la formula de Euler y volver alcaso anterior.
Encuentremos una solucion particular de
y′′ − 3y′ + 2y = 3sen(2x) ,
entonces:(D2 − 3D + 2)y = 3sen(2x) ,
sabemos que: e2ix = cos(2x) + isen(2x) y que la parte imaginaria de una solucion particular de
(D2 − 3D + 2)y = 3e2ix
sera una solucion de nuestro problema. Por lo tanto, con b = 3 y a = 2i se tiene:
yp =1
P (D)
[3e2ix
]=
3e−2x
P (2i)=
3e−2x
(2i)2 − 3(2i) + 2=
3e−2x
−2(1 + 3i)=
3(1− 3i)e−2x
−20
= − 3
20(1− 3i)(cos(2x) + isen(2x)) = − 3
20[cos(2x) + 3sen(2x) + i(sen(2x)− 3 cos(2x))]
la parte imaginaria de esta ultima ecuacion sera nuestra solucion particular
yp = − 3
20[sen(2x)− 3 cos(2x)] .
5. Si Q(x) = Q1(x) +Q2(x) + · · ·+Qn(x), entonces
yp =1
P (D)[Q(x)] =
1
P (D)[Q1(x)] +
1
P (D)[Q2(x)] + · · ·+ 1
P (D)[Q2(x)]
266

Borra
dor Pre
limin
ar
7.5. ECUACIONES DIFERENCIALES Y LAS TRANSFORMADAS DE LAPLACE
7.4.6. Practicando con Maxima
7.4.7. Ejercicios
1. Resuelva la ecuaciony′′ + y = ex .
2. Encuentre la solucion general dey′′ − y = x3 + 3x− 4 .
7.5. Ecuaciones diferenciales y las transformadas de Laplace
7.5.1. Algunas definiciones previas
En general vamos a definir una transformacion integral, F (s), de una funcion, f(t) como
F (s) =
∫ b
a
K (s, t) f(t)dt = T {f(t)} , (7.34)
donde K (s, t) es una funcion conocida de s y t, denominada el nucleo de la transformacion. Si a y b sonfinitos la transformacion se dira finita, de lo contrario infinita. Dependiendo de la seleccion del nucleo y loslimites tendremos distintas transformaciones integrales. En Fısica las mas comunes son las siguientes
Nombre F (s) = T {f(t)} f(t) = T−1 {F (s)}
Laplace L(s) =∫∞
0e−stf(t)dt f(t) = 1
2πi
∫ γ+i∞γ−i∞ estL(s)ds
Fourier de senos y cosenos F(s) =√
2π
∫ ∞0
sen(st)cos(st)
f(t)dt f(t) =√
2π
∫ ∞0
sen(ts)cos(ts)
F(s)ds
Fourier compleja F(s) = 1√2π
∫ ∞−∞
eistf(t)dt f(t) = 1√2π
∫ ∞−∞
e−istF(s)ds
Hankel (Fourier-Bessel) F (s) =
∫ ∞0
tJn(st)f(t)dt f(t) =
∫ ∞0
sJn(ts)F (s)ds
Mellin M(s) =
∫ ∞0
ts−1 f(t)dt f(t) = 12πi
∫ γ+i∞γ−i∞ s−t M(s)ds
La idea detras de la utilidad de las transformaciones integrales puede resumirse en el siguiente esquema
EDO para f(t)−→ transformacion directa −→
F (s) = T {f(t)}relacion para F (s)
eventualmente mas facil↓ ↓
solucion directadifıcil
solucion para F (s)mas facil
↓ ↓
se encuentra f(t)←− transformacion inversa←−
f(t) = T−1 {F (s)} se encuentra F (s)
267

Borra
dor Pre
limin
ar
7.5. ECUACIONES DIFERENCIALES Y LAS TRANSFORMADAS DE LAPLACE
7.5.2. Transformada de Laplace
En nuestro caso ilustraremos el uso de transformaciones integrales con la transformada de Laplace, quedenotaremos de manera simbolica como F (s) = L [f(t)]. Esto es:
F (s) = L [f(t)] =
∫ ∞0
f(t)e−stdt , 0 ≤ t <∞ .
Es bueno tener en cuenta que si la integral impropia∫ ∞0
f(t)e−stdt , 0 ≤ t <∞
converge para algun valor de s = s0, entonces convergera para todo s > s0. Si la integral existe se denominarala transformada de Laplace de f(t).
Por ejemplo, podemos ver que si f(t) = t, entonces
L[t] = F (s) =
∫ ∞0
te−stdt = lımh→∞
∫ h
0
te−stdt
= lımh→∞
[e−st
(− ts− 1
s2
)]h0
= lımh→∞
[−he
−sh
s− e−sh
s2+
1
s2
]=
1
s2.
Se puede ver que si f(t) = 0, entonces
L[0] =
∫ ∞0
0e−stdt = 0 .
Existen tablas con las transformadas de Laplace, de manera que no es necesario ir calculando las integralesimpropias para cada una de las funciones.
Las transformadas de Laplace son lineales, es decir:
L[C1f1(t) + C2f2(t)] = C1L[f1(t)] + C2L[f2(t)]
ademas, existe tambien la transformacion inversa de Laplace. Esto significa que si
L[f(t)] = F (s) ⇒ L−1[F (s)] = f(t)
La transformacion inversa de Laplace tambien es un operador lineal.
7.5.3. Transformadas de Laplace y las ecuaciones diferenciales lineales
Vamos a considerar un metodo para resolver ecuaciones diferenciales lineales con coeficientes constantes,es decir, ecuaciones del tipo
any(n) + an−1y
(n−1) + · · ·+ a2y′′ + a1y
′ + a0 = Q(x) , (7.35)
utilizando las transformadas de Laplace. Este metodo, como veremos a continuacion, permite obtener unasolucion particular dado un conjunto de condiciones iniciales.
Si multiplicamos (7.35) por e−sx e integramos, podemos ver que∫ ∞0
e−sx[any
(n) + an−1y(n−1) + · · ·+ a2y
′′ + a1y′ + a0
]dx =
∫ ∞0
e−sxQ(x)dx
268

Borra
dor Pre
limin
ar
7.5. ECUACIONES DIFERENCIALES Y LAS TRANSFORMADAS DE LAPLACE
termino por termino:
an
∫ ∞0
e−sxy(n)dx+ an−1
∫ ∞0
e−sxy(n−1)dx+ · · ·+ a2
∫ ∞0
e−sxy′′dx + a1
∫ ∞0
e−sxy′dx+
a0
∫ ∞0
e−sxydx =
∫ ∞0
e−sxQ(x)dx
anL[y(n)
]+ an−1L
[y(n−1)
]+ · · ·+ a2L [y′′] + a1L [y′] + a0L [y] = L [Q(x)] (7.36)
Ahora bien, podemos observar lo siguiente
L [y′] =
∫ ∞0
e−sxy′dx
y al integrar por partes, con u = e−sx y dv = y′dx, se tiene∫ ∞0
e−sxy′dx = lımb→∞
[e−sxy
]b0−∫ ∞
0
(−s)e−sxydx
= lımb→∞
[e−sby(b)− y(0)
]+ s
∫ ∞0
ye−sxdx
Si agregamos la suposicion adicional de que la solucion de la ecuacion diferencial, es decir, y(x) satisface
lımx→∞
[e−sxy(k)(x)
]= 0 , k = 0, 1, 2, . . . , n− 1 , s > s0 ,
entonces:
L [y′] =
∫ ∞0
e−sxy′dx = −y(0) + sL [y] .
Para calcular L [y′′] se procede de manera similar, pero ahora es necesario integrar dos veces por partesy utilizar el resultado para L [y′]. Resultando:
L [y′′] = −y′(0) + sL [y′] = s2L [y]− [y′(0) + sy(0)] .
Repitiendo el proceso:
L [y′′′] = s3L [y]−[y′′(0) + sy′(0) + s2y(0)
]L[y(4)
]= s4L [y]−
[y′′′(0) + sy′′(0) + s2y′(0) + s3y(0)
],
y si seguimos hasta orden n, se puede demostrar que
L[y(n)
]= snL [y]−
[y(n−1)(0) + sy(n−2)(0) + · · ·+ sn−2y′(0) + sn−1y(0)
].
Al sustituir todos estos ultimos resultados en (7.36), sacando los terminos que contienen a L [y], resulta
269

Borra
dor Pre
limin
ar
7.5. ECUACIONES DIFERENCIALES Y LAS TRANSFORMADAS DE LAPLACE
que podemos escribir (7.36) de la manera siguiente:
ansnL [y] − an
[y(n−1)(0) + sy(n−2)(0) + · · ·+ sn−2y′(0) + sn−1y(0)
]+an−1s
n−1L [y] − an−1
[y(n−2)(0) + sy(n−3)(0) + · · ·+ sn−3y′(0) + sn−2y(0)
]+an−2s
n−2L [y] − an−2
[y(n−3)(0) + sy(n−4)(0) + · · ·+ sn−4y′(0) + sn−3y(0)
]...
......
......
......
......
......
......
......
+a2s2L [y] − a2 [y′(0) + sy(0)]
+a1sL [y] − a1y(0)
+a0L [y] = L [Q(x)]
factorizando para L [y] se tiene:[ans
n + an−1sn−1 + an−2s
n−2 + · · ·+ a2s2 + a1s+ a0
]L [y]
−[ans
n−1 + an−1sn−2 + · · ·+ a2s+ a1
]y(0)
−[ans
n−2 + an−1sn−3 + · · ·+ a3s+ a2
]y′(0)
......
......
......
......
...
− [ansn + an−1] y(n−2)(0)
− any(n−1)(0) = L [Q(x)] . (7.37)
En (7.37) se puede apreciar que es necesario conocer las cantidades: y(0), y′(0), y′′(0), ... , y(n−1)(0),las cuales se pueden determinar vıa las condiciones iniciales. Por otra lado, tambien se puede ver que latransformada de Laplace de la funcion que estamos buscando L [y] se puede despejar directamente de (7.37).
Por ejemplo, encontraremos la solucion a siguiente ecuacion diferencial
y′′ + y = sen(2x) con:
y(0) = 0
y′(0) = 1
Si nos fijamos en (7.37) vemos que para este caso se tiene: a2 = 1, a1 = 0 y a0 = 1, entonces:[a2s
2 + a1s+ a0
]L [y]− [a2s+ a1] y(0)− [a2] y′(0) = L [sen(2x)][
s2 + 1]L [y]− sy(0)− y′(0) = L [sen(2x)][
s2 + 1]L [y]− 1 =
2
s2 + 4
L [y] =1
s2 + 1
[2
s2 + 4+ 1
]por lo tanto:
L [y] =s2 + 6
(s2 + 1) (s2 + 4)= − 2
3(s2 + 4)+
5
3(s2 + 1)=− 2
3
s2 + 4+
53
s2 + 1
mediante la transformada inversa en cada termino
L−1
[ − 23
s2 + 4
]= −1
3L−1
[2
s2 + 22
]= −1
3sen(2x)
L−1
[ 53
s2 + 1
]=
5
3L−1
[1
s2 + 1
]=
5
3sen(x)
270

Borra
dor Pre
limin
ar
7.5. ECUACIONES DIFERENCIALES Y LAS TRANSFORMADAS DE LAPLACE
se tiene
L [y] = L[−1
3sen(2x) +
5
3sen(x)
]=− 2
3
s2 + 4+
53
s2 + 1
por lo tanto, nuestra solucion particular para las condiciones iniciales dadas es:
y(x) = −1
3sen(2x) +
5
3sen(x) .
7.5.4. Integral de Convolucion
Algunas veces es posible identificar la transformada de Laplace H(s) como el producto de dos transfor-madas de Laplace, F (s) y G(s) las cuales son las transformadas de funciones conocidas f(t) y g(t). Peroeso es algunas veces: en general la transformada del producto de funciones no es el productode transformadas. Esas veces estan contenidas en el llamado Teorema de Convolucion, segun el cual seestablece una especie de “producto generalizado” de funciones f y g.
Teorema de Convolucion: Sean
F (s) = L [f(t)] y G(s) = L [g(t)] definidas en el intervalo s > a > 0 ,
entoncesH(s) = F (s)G(s) = L [h(t)] , para s > a
donde
h(t) = L−1 [F (s)G(s)] =
∫ t
0
f(t− τ) g(τ) dτ =
∫ t
0
f(τ) g(t− τ) dτ = (f ∗ g) (t)
y h(t) se identifica como la convolucion de f y g.
Las integrales arriba expuestas se conocen con integrales de convolucion y hemos denotado h(t) =(f ∗ g) (t) para insistir que se trata de un “producto generalizado” de funciones f y g, que comparte, con elproducto ordinario de funciones, las siguientes propiedades
f ∗ g = g ∗ f (conmutatividad)
f ∗ [g + k] = f ∗ g + f ∗ k (distributividad)
f ∗ [g ∗ k] = [f ∗ g] ∗ k (asociatividad)
f ∗ 0 = 0 ∗ f = 0
Sin embargo f ∗ 1 6= f , tal y como se puede apreciar de
(f ∗ 1) (t) =
∫ t
0
f(t− τ) 1 dτ =
∫ t
0
f(t− τ) dτ 6= f (t) ,
en el caso particular de que f (t) = cos (t) tendremos
(cos ∗1) (t) =
∫ t
0
cos(t− τ) 1 dτ = sen(t− τ)|τ=tτ=0 = sen(0)− sen(t) = −sen(t) .
Por la misma razon, no hay garantıa que (f ∗ f) (t) > 0 ∀ f 6= 0.
271

Borra
dor Pre
limin
ar
7.5. ECUACIONES DIFERENCIALES Y LAS TRANSFORMADAS DE LAPLACE
El ejemplo mas emblematico de la aplicacion del Teorema de Convolucion es el estudio del osciladoramortiguado y forzado, el cual viene descrito por la ecuacion diferencial
x+ 2λ x+ ω20 x = f(t) , con:
x(0) = x0
x(0) = dxdt
∣∣t=0
= x0
La transformada de Laplace (ecuacion (7.37)) no conduce a lo siguiente[a2s
2 + a1s+ a0
]L [x]− [a2s+ a1]x(0)− [a2] x(0) = L [f(t)][
s2 + 2λs+ ω20
]L [x]− [s+ 2λ]x(0)− x(0) = L [f(t)][
s2 + 2λs+ ω20
]L [x]− [s+ 2λ]x0 − x0 = F (s)
L [x] =F (s) + [s+ 2λ]x0 + x0
s2 + 2λs+ ω20
por lo tanto
L [x] =F (s) + [s+ 2λ]x0 + x0
s2 + 2λs+ ω20
=2λ x0 + x0 + sx0
s2 + 2λs+ ω20
+F (s)
s2 + 2λs+ ω20
,
para el primer sumando de la expresion anterior, se tiene lo siguiente:
L [x](1) =2λ x0 + x0 + sx0
s2 + 2λs+ ω20
=x0 (s+ λ)
(s+ λ)2
+ (ω20 − λ2)
+x0 + x0 λ
(s+ λ)2
+ (ω20 − λ2)
,
y mediante la transformada inversa:
L−1
[x0 (s+ λ)
(s+ λ)2
+ (ω20 − λ2)
+x0 + x0 λ
(s+ λ)2
+ (ω20 − λ2)
](1)
= x0 e−λt cos(ωt) +
x0 + λx0
ωsen(ωt) ,
con ω =√ω2
0 − λ2.Para el segundo sumando
L [x](2) =F (s)
s2 + 2λs+ ω20
,
por el teorema de convolucion se obtiene
L−1
[F (s)
s2 + 2λs+ ω20
](2)
=
∫ t
0
1
ωe−λ(t−τ)sen[ω (t− τ)] f (t) dτ .
La solucion sera entonces:
x (t) = x0 e−λt cos(ωt) +
x0 + λx0
ωsen(ωt) +
∫ t
0
1
ωe−λ(t−τ)sen[ω (t− τ)] f (t) dτ .
7.5.5. Ejemplos
1. Ecuacion diferencial, con valores iniciales, inhomogenea a una funcion escalon:
y′′ + 4y = h(x) =
0 0 ≤ x ≤ π
1 π < x ≤ 2πcon:
y(0) = 1
y′(0) = 0
272

Borra
dor Pre
limin
ar
7.5. ECUACIONES DIFERENCIALES Y LAS TRANSFORMADAS DE LAPLACE
podemos escribiry′′ + y = h(x) = uπ(x)− u2π(x)
volviendo a fijarnos en (7.37)[a2s
2 + a1s+ a0
]L [y]− [a2s+ a1] y(0)− [a2] y′(0) = L [h(x)][
s2 + 4]L [y]− sy(0)− y′(0) = L [uπ(x)− u2π(x)][
s2 + 4]L [y]− s =
e−πs
s− e−2πs
s
L [y] =1
s2 + 4
[s+
e−πs
s− e−2πs
s
]por lo tanto
L [y] =1
s2 + 4
[s+
e−πs
s− e−2πs
s
]=
s
s2 + 4+
e−πs
s (s2 + 4)− e−2πs
s (s2 + 4)
mediante las transformadas inversas
L−1
[s
s2 + 4
]= cos(2x)
L−1
[e−πs
s (s2 + 4)
]= uπ(x)g (x− π) , con g (τ) = L−1
[1
s (s2 + 4)
]por lo tanto
L−1
[e−πs
s (s2 + 4)
]= uπ(x)L−1
[1
4
(1
s− s
s2 + 4
)]= uπ(x)
[1
4{1− cos[2(x− π)]}
]del mismo modo
L−1
[e−2πs
s (s2 + 4)
]= u2π(x)
[1
4{1− cos[2(x− 2π)]}
]Recordemos que hemos definido la funcion escalon como
uc (t) =
0 t < c
1 t ≥ cc > 0 .
Por lo tanto:
L [y] = L[cos(2x) + uπ(x)
[1
4{1− cos[2(x− π)]}
]+ u2π(x)
[1
4{1− cos[2(x− 2π)]}
]]=
s
s2 + 4+
e−πs
s (s2 + 4)− e−2πs
s (s2 + 4),
y finalmente la solucion sera
y(x) = cos(2x) + uπ(x)
[1
4{1− cos[2(x− π)]}
]+ u2π(x)
[1
4{1− cos[2(x− 2π)]}
].
273

Borra
dor Pre
limin
ar
7.5. ECUACIONES DIFERENCIALES Y LAS TRANSFORMADAS DE LAPLACE
2. Ecuacion diferencial, con valores iniciales, inhomogenea a una funcion impulso (delta de Dirac)
y′′ + 2y′ + 2y = δ (x− π) , con:
y(0) = 0
y′(0) = 0
La funcion (distribucion) delta de Dirac viene definida por
δ (t− t0) = 0 con t 6= t0 y
∫ ∞−∞
dτ δ (τ − τ0) = 1 (7.38)
con la util propiedad: ∫ ∞−∞
dτ δ (τ − τ0) f (τ) = f (τ0) (7.39)
La transformada de Laplace de la funcion (distribucion) Delta de Dirac es:
L [δ (t− c)] = e−cs ,
por lo tanto, para nuestra ecuacion problema
y′′ + 2y′ + 2y = δ (x− π)
vemos que segun (7.37)[a2s
2 + a1s+ a0
]L [y]− [a2s+ a1] y(0)− [a2] y′(0) = L [δ (x− π)][
s2 + 2s+ 2]L [y]− [s+ 2] y(0)− y′(0) = L [δ (x− π)][
s2 + 2s+ 2]L [y] = e−πs
L [y] =e−πs
s2 + 2s+ 2
por lo tanto:
L [y] =e−πs
s2 + 2s+ 2= e−πs
1
(s+ 1)2
+ 1
miramos la transformada inversa
L−1
[e−πs
1
(s+ 1)2
+ 1
]= uπ(x)
[e−(x−π)sen (x− π)
]esto significa que:
L [y] = L[uπ(x)
[e−(x−π)sen (x− π)
]]=
e−πs
s2 + 2s+ 2
resultandoy(x) = uπ(x)
[e−(x−π)sen (x− π)
]o si lo preferimos en la otra notacion:
y(x) =
0 x < π
e−(x−π)sen (x− π) x ≥ π .
274

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
7.5.6. Practicando con Maxima
7.5.7. Ejercicios
1. Resuelva, utilizando transformadas de Laplace, las siguientes ecuaciones
a) y′ − y = 0, y(0) = 1
b) y′ − y = ex, y(0) = 1
c) y′ + y = e−x, y(0) = 1
d) y′′ + 4y′ + 4y = 0, y(0) = 1, y′(0) = 1
e) y′′ − y′ − 2y = 5sen(x), y(0) = 1, y′(0) = −1
f ) y′′′ − 2y′′ + y′ = 2ex + 2x, y(0) = 0, y′(0) = 0, y′′(0) = 0
2. Evalue cada una de las siguientes funciones
a) Γ(6)
b) Γ(7)
c) Γ(−5/2)
d) Γ(5/2)
3. Evalue cada una de las siguientes funciones factoriales
a)(− 5
2
)!
b)(− 7
2
)!
c)(
32
)!
d)(
52
)!
7.6. Algunas aplicaciones de las ecuaciones de orden superior
7.6.1. Mecanica y Electricidad
Una de las mas famosas ecuaciones diferenciales, lineales, ordinaria con coeficientes constantes es
α u+ β u+ γ u ≡ α d2u
dt2+ β
du
dt+ γ u = Λ (t)
La cual utiliza para describir sistemas mecanicos y toma la forma
md2x
dt2+ η
dx
dt+ k x = F (t) donde
x ⇒ Desplazamientodxdt ⇒ Velocidadm ⇒ masaη ⇒ Constante de Amortiguamientok ⇒ Constante Elastica
F (t) ⇒ Fuerza Aplicada
275

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
y circuitos electricos
Ld2Q
dt2+R
dQ
dt+
1
CQ = E (t) donde
Q ⇒ Carga ElectricadQdt = I ⇒ Intensidad de CorrienteL ⇒ InductanciaR ⇒ ResistenciaC ⇒ Capacitancia
E (t) ⇒ Fuerza Electromotriz
Analicemos la ecuacion que describe sistemas mecanicos y dejamos la cual describe sistemas electricos paraun analisis posterior. El primero de los casos a analizar sera el de las oscilaciones libres, vale decir F (t) = 0,lo cual en el lenguaje de las ecuaciones diferenciales se traduce a ecuaciones diferenciales homogeneas. Encontraste, si F (t) 6= 0, es decir, el caso inhomogeneo, estaremos describiendo oscilaciones forzadas.
7.6.2. Oscilaciones libres
Analicemos pues del caso del oscilador armonico libre, i.e.
md2x
dt2+ k x = 0 ⇒ x (t) = C1 cos (ω0t) + C2 sen (ω0t) con ω0 =
√k
m
ω0 se denomina la frecuencia natural de oscilacion y C1 y C2 las constantes de integracion que se determinande las condiciones iniciales. Es claro que
si
{C1 = A cos δC2 = A sen δ
⇒ x (t) = C1 cos (ω0t) + C2 sen (ω0t) ⇔ x (t) = A cos (ω0t+ δ)
con R la amplitud y δ en angulo de fase. Obviamente, el perıodo del movimiento sera
T =2π
ω0= 2π
√m
k
Como un ejemplo analicemos el caso de un sistema en el cual m = 0,1 Kg. y k = 0,4 N/m En este caso
la frecuencia angular ω0 =√
km = 2 rad/sg. La ecuacion diferencial que describe este movimiento sera
d2x
dt2+ 4 x = 0 ∧
x (0) = 1; dx
dt
∣∣t=0
= 0; ⇒ x (t) = cos(2t)
x (0) = 4; dxdt
∣∣t=0
= 0 ⇒ x (t) = 4 cos (2t)
x (0) = −2; dxdt
∣∣t=0
= 0 ⇒ x (t) = −2 cos (2t)
d2x
dt2+ 4 x = 0 ∧
x (0) = 0; dx
dt
∣∣t=0
= 1; ⇒ x (t) = 12 sen(2t)
x (0) = 0; dxdt
∣∣t=0
= 4; ⇒ x (t) = 2 sen (2t)
x (0) = 0; dxdt
∣∣t=0
= −2 ⇒ x (t) = − sen (2t)
276

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.4: Oscilador armonico libre. Cambios en la posicion inicial no afectan la frecuencia natural.
7.6.3. Oscilaciones libres amortiguadas
Consideremos que en el movimiento actua una fuerza de amortiguacion proporcional a la velocidad, porlo cual el movimiento viene descrito por
md2x
dt2+ η
dx
dt+ k x =
d2x
dt2+ 2µ
dx
dt+ ω2
0 x = 0
la cual constituye una ecuacion diferencial lineal homogenea de segundo orden. Las raıces del polinomiocaracterıstico asociado seran
r =−η ±
√η2 − 4km
2m= − η
2m±√( η
2m
)2
− k
m= −µ±
√µ2 − ω2
0
por lo tanto la solucion sera
x (t) = C1e
(−(µ+√µ2−ω2
0
)t)
+ C2e
(−(µ−√µ2−ω2
0
)t)
de donde se deducen los siguientes casos
x (t) = C1 er1t + C2 e
r2t ⇐ µ2 − ω20 > 0 Sobreamortiguado
x (t) = (C1 + C2 t) eµ t ⇐ µ2 − ω2
0 = 0 Crıtico
x (t) = e−µ t{C1 cos
[(√ω2
0 − µ2)t]
+ C2 sen[(√
ω20 − µ2
)t]}
⇐ µ2 − ω20 < 0 Subamortiguado
Como un ejemplo analicemos el mismo caso del sistema anterior en el cual m = 0,1 Kg. y k = 0,4 N/m,solo que ahora la constante de amortiguamiento sera η = 0,60, 0,40 y 0,15 En todos los caso la frecuencia
angular ω0 =√
km = 2 rad/sg. y la cantidad subradical
(µ2 − ω2
0
)correspondera a los tres casos anteriormente
277

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.5: Oscilador Armonico Libre. Cambios de velocidad incial no afectan la frecuencia natural
mencionados. Las ecuaciones diferenciales que describen este movimiento seran
d2xdt2 + 6 dx
dt + 4 x = 0 ∧
x (0) = 0
dxdt
∣∣t=0
= 4
⇒ x (t) =(
12 + 7
2√
5
)e(√
5−3)t +(
12 −
72√
5
)e−(3+
√5)t
d2xdt2 + 4 dx
dt + 4 x = 0 ∧
x (0) = 0
dxdt
∣∣t=0
= 4
⇒ x (t) = (1 + 6t) e−2t
d2xdt2 + dx
dt + 4 x = 0 ∧
x (0) = 0
dxdt
∣∣t=0
= 4
⇒ x (t) = e−12 t[
9√15
sen(√
152 t)
+ cos(√
152 t)]
Si en los casos anteriores cambiamos el signo de la velocidad inicial, i.e. dxdt
∣∣t=0
= −4 m/s, tendremos lasiguiente representacion grafica.
x (0) = 1; dxdt
∣∣t=0
= −4; ⇒ x (t) =(
12 −
12√
5
)e(√
5−3)t +(
12 + 1
2√
5
)e−(3+
√5)t
x (0) = 1; dxdt
∣∣t=0
= −4; ⇒ x (t) = (1 + 2t) e−2t
x (0) = 1; dxdt
∣∣t=0
= −4 ⇒ x (t) = e−12 t[−7√15
sen(√
152 t)
+ cos(√
152 t)]
En todos los casos dado que r1, r2 < 0 se tiene que x (t→ 0) → 0. El movimiento subamortiguado esperiodico y el perıodo viene descrito por
Tam =2πω0√
1−(µω0
)2=
T√1−
(µω0
)2si
(µ
ω0
)2
<< 1 ⇒ Tam ≈ T
(1 +
1
2
(µ
ω0
)2)
278

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.6: Oscilaciones libres amortiguadas y no amortiguadas. Notese que el perıodo es mayor para el casosubamortiguado
el cual siempre sera mayor que el periodo de oscilacion natural del sistema.
7.6.4. Oscilaciones forzadas
Supongamos ahora que existe una fuerza aplicada al sistema tal que
d2x
dt2+ 2µ
dx
dt+ ω2
0 x =F0
mcos ($t)
Oscilaciones forzadas no amortiguadas
En este caso µ = 0 y por lo tanto
d2x
dt2+ ω2
0 x =F0
mcos ($t)
Amplitud modulada $ 6= ω0
y tendra como solucion
x (t) = C1 cos (ω0t) + C2 sen (ω0t)︸ ︷︷ ︸homogenea
+F0
m (ω20 −$2)
cos ($t)︸ ︷︷ ︸inhomogenea
= A cos (ω0t+ δ) +F0
m (ω20 −$2)
cos ($t)
con lo cual es la suma de dos movimientos armonicos con distintas frecuencias y amplitudes. Si el cuerpoparte del reposo, esto es: x (0) = x (0) = 0 entonces
C1 = −F0
m(ω20−$2)
C2 = 0
⇒ x (t) =F0
m (ω20 −$2)
[cos ($t)− cos (ω0t)]
279

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.7: Oscilaciones Libres amortiguadas con cambio de signo en la velocidad inicial
dado que
cos (ω0t) = cos
[{(ω0 −$
2
)+
(ω0 +$
2
)}t
]cos (ω0t) = cos
(ω0 −$
2
)cos
(ω0 +$
2
)− sen
(ω0 −$
2
)sen
(ω0 +$
2
)cos ($t) = cos
[{(ω0 −$
2
)−(ω0 +$
2
)}t
]cos ($t) = cos
(ω0 −$
2
)cos
(ω0 +$
2
)+ sen
(ω0 −$
2
)sen
(ω0 +$
2
)
x (t) =2F0
m (ω20 −$2)
[sen
(ω0 −$
2t
)]︸ ︷︷ ︸
Envolvente
[sen
(ω0 +$
2t
)]
El mismo sistema anterior en el cual m = 0,1 Kg. y k = 0,4 N/m, cuando parte del reposo desde el origende coordenadas y existe una fuerza de excitacion F = 0,5 cos (3t) . Por lo tanto la ecuacion diferencial quedescribe el movimiento sera
d2x
dt2+ 4 x = 5 cos (3t)
x (0) = 0
dxdt
∣∣t=0
= 0
=⇒ x (t) = cos(2t)︸ ︷︷ ︸homogenea
− cos(3t)︸ ︷︷ ︸inhomogenea
≡ 2 sen
(1
2t
)︸ ︷︷ ︸
envolvente
sen
(5
2t
)
280

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.8: Oscilador armonico forzado con $ = ω20 Notese el fenomeno de resonancia
Resonancia $ = ω0
En el caso que la frecuencia de la fuerza de excitacion coincida con la frecuencia natural del sistema, setiene
d2x
dt2+ ω2
0 x = F0 cos (ω0t) =⇒ x (t) = C1 cos (ω0t) + C2 sen (ω0t) +F0
2mω0t︸ ︷︷ ︸
envolvente
sen (ω0t)
El sistema anterior (m = 0,1 Kg. y k = 0,4 N/m), cuando parte del reposo desde el origen de coordenadas yexiste una fuerza de excitacion F = 0,5 cos (2t). Por lo tanto la ecuacion diferencial que describe el movimientosera
d2x
dt2+ 4 x = 5 cos (2t) ∧
x (0) = 0
dxdt
∣∣t=0
= 0
=⇒ x(t) =5t
4sen (2t)
7.6.5. Oscilaciones forzadas amortiguadas
En este caso µ 6= 0 y por lo tanto
d2x
dt2+ 2µ
dx
dt+ ω2
0 x =F0
mcos ($t)
la cual tendra como solucion
x (t) = C1e
(−(µ+√µ2−ω2
0
)t)
+ C2e
(−(µ−√µ2−ω2
0
)t)
+F0
m
((ω2
0 −$2)
cos ($t) + 2µ$ sen ($t)
(ω20 −$2)
2+ (2µ$)
2
)
281

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.9: Oscilador armonico forzado. Notese la envolvente de la funcion
una vez mas se puede convertir en
x (t) = C1e
(−(µ+√µ2−ω2
0
)t)
+ C2e
(−(µ−√µ2−ω2
0
)t)
︸ ︷︷ ︸solucion homogene ≡regimen transitorio
+F0
m
cos ($t− ζ)√(ω2
0 −$2)2
+ (2µ$)2︸ ︷︷ ︸
solucion inhomogenea ≡ regimen estacionario
donde
cos (ζ) =
(ω2
0 −$2)√
(ω20 −$2)
2+ (2µ$)
2y sen (ζ) =
2µ$√(ω2
0 −$2)2
+ (2µ$)2
Es claro que el termino homogeneo en todos sus casos (sobreamortiguado, crıtico y subamortiguado) tiende acero, por ello se considera un termino transitorio, no ası el termino no homogeneo que permanece oscilando.En terminos Fısico se pude decir que el termino transitorio representa la disipacion de la energıa inicial que sele provee al sistema a traves de la posicion y la velocidad inicial de lanzamiento. Esta energıa inicial se expresaa traves de las condiciones iniciales se disipa. Si no existiera disipacion esta energıa inicial permanecerıa porsiempre en el sistema. Finalmente el termino no homogeneo, a traves de la fuerza de excitacion, imponeel movimiento al sistema. Notese ademas que el termino no homogeneo nunca se hace infinito, ni siquierapara el caso para el cual tiene un maximo y es aquel en el cual la frecuencia de excitacion coincide con lafrecuencia natural del sistema.
Veamos el siguiente ejemplo. En un circuito RLC, cuyos componentes son L = 1 henry, R = 40 ohmiosy C = 1
40000 faradios, se le aplica un tension de V = 24 voltios. Determine el comportamiento de la carga yla intensidad de corriente en el circuito.
La ecuacion diferencial que describe el comportamiento del sistema
Ld2Q (t)
dt2+R
dQ (t)
dt+
1
CQ = E (t) ⇒ d2Q (t)
dt2+ 40
dQ (t)
dt+ 40000 Q (t) =
1
2
Ld2I (t)
dt2+R
dI (t)
dt+
1
CI (t) =
dE (t)
dt⇒ d2I (t)
dt2+ 40
dI (t)
dt+ 40000 I (t) = 0
282

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.10: Carga en funcion del tiempo en un circuito RLC sometido a un voltaje constante. Notese queel sistema alcanza el regimen estacionario cercano a los 0,3 seg
tomando en cuenta las condiciones iniciales tendremos como solucion
Q (0) = 10−4
I (0) = dQdt
∣∣∣t=0
= 10−2
⇒
Q(t) = 1
8000 + e−20t[
47√
112640000 sen
(√1160t
)+ 7
8000 cos(√
1160t)]
I (t) = dQdt = e−20t
[1
100 cos(√
1160t)− 37
√11
6600 sen(√
1160t)]
Si en vez de un tension constante de 0,5 V. la fuente de tension es sinusoidal de la forma E (t) =12 cos (180t) voltios las ecuaciones se transforman en
d2Q
dt2+ 40
dQ
dt+ 40000 Q =
1
2cos (180t) con Q (0) = 10−4 ∧ I (0) =
dQ
dt
∣∣∣∣t=0
= 10−2
d2I
dt2+ 40
dI
dt+ 40000 I = −90sen (180t)
con sus correspondientes soluciones a las condiciones iniciales del sistema
Q(t) =1
1000
{e−20t
[293√
11
30140sen
(60√
11t)
+91
685cos(
60√
11t)]− 9
274cos (180t) +
19
548sen (180t)
}
I(t) =1
100
{e−20t
[103
274cos(
60√
11t)− 2461
√11
3014sen
(60√
11t)]
+81
137sen (180t) +
171
274cos (180t)
}Por analogıa con el caso mecanico procedemos a identificar cantidades
2µ = RL
ω20 = 1
LC
⇒ A =V0
L
√(1LC −$2
)2+(RL$)2 =
1
2√$4 − 78400$2 + 1600000000
con ello se puede ver la funcionalidad de la amplitud con la frecuencia excitatriz
283

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.11: Intensidad en un circuito RLC sometido a un voltaje constante.
7.6.6. Movimiento alrededor de un punto de equilibrio
La fuerza elastica F = −kx, mas alla de ser el caso mas simple, representa la primera aproximacion almovimiento alrededor de un punto de equilibrio estable. Si recordamos que para una fuerza que derive de unpotencial se tiene
F = −dV
dx⇒ F = −k x = −
d(
12k x
2)
dx,
mas aun, un punto de equilibrio estable se define como aquel en el cual no existen fuerzas externas, vale decir
F |x=x0= 0 ⇒ −dV
dx
∣∣∣∣x=x0
= 0 ,
por lo cual, dado un potencial de una fuerza arbitraria siempre podemos expandirlo en series de Tayloralrededor de un punto de equilibrio x = x0
V (x) = V (x0) + (x− x0)dV
dx
∣∣∣∣x=x0︸ ︷︷ ︸
=0
+1
2!(x− x0)
2 d2V
dx2
∣∣∣∣x=x0
+1
3!(x− x0)
3 d3V
dx3
∣∣∣∣x=x0
· · ·
En general, alrededor de un punto de equilibrio x = x0 la primera aproximacion de una funcion potencialsera
V (x) ≈ 1
2!(x− x0)
2 d2V
dx2
∣∣∣∣x=x0
≈ 1
2k (x− x0)
2
Ası, un potencial de la forma
V (x) =1
6x6 − 2x5 +
35
4x4 − 50
3x3 + 12x2
genera una fuerza
F = −dV (x)
dx= −
(x5 − 10x4 + 35x3 − 50x2 + 24x
)284

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.12: Carga en funcion del tiempo en un circuito RLC sometido a un voltaje sinusoidal V (t) =12 cos (180t) . Notese el regimen transitorio (0 ≤ t . 0,17) y estacionario (t & 0,17) .
tendra como puntos de equilibrio x = 0, x = 1, x = 2, x = 3 y x = 4. En torno a x = 0 se podra aproximarcon un potencial parabolico
V (x) =1
2!(x− x0)
2 d2V (x)
dx2
∣∣∣∣x=x0
= 12x2
tal y como se observa en la figura 7.15
7.6.7. Pendulo simple con desplazamiento finito
El caso tıpico de esta aproximacion lo constituye el pendulo simple: una masa m, empotrada a unavarilla, de masa despreciable y de longitud L. La varilla se desplaza un angulo θ de la vertical y se suelta.La Figura (7.16) muestra el diagrama de cuerpo libre del Pendulo Fısico. Desde la ancestral fısica general,aun en secundaria, era proverbial resolver este problema suponiendo angulos pequenos. En esas tempranasepocas de nuestro conocimiento de Fısica era limitado y mas limitado aun era nuestra capacidad pararesolver ecuaciones diferenciales. A este “problema” se le conoce con el pendulo fısico. Aproximar es un artey exploraremos este arte. Como norma general tendremos que se debe aproximar al final, pero no siemprees ası.
Si suponemos un cuerpo de masa constante, m, las ecuaciones diferenciales que describen el movimientono pueden ser otras que aquellas que provengan de las ecuaciones de Newton∑
externas
F(r(t),v(t), t) = mdv(t)
dt= m a(t) = m (ar ur + aθ uθ) , (7.40)
Es bueno recordar que hay que expresar la aceleracion en un sistema de coordenadas moviles (ur, uθ).
285

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.13: Intensidad de corriente en un circuito RLC sometido a un voltaje sinusoidal V (t) = 12 cos (180t)
Esto es
ur = cos (θ) i + sen (θ) j ⇒ durdt
= [−sen (θ) i + cos (θ) j] θ = θuθ
uθ = −sen (θ) i + cos (θ) j ⇒ duθdt
= − [cos (θ) i + sen (θ) j] θ = −θur
con lo cual
r (t) = r (t) ur ⇒ v (t) =d [r (t) ur]
dt= rur + rθuθ
y para la aceleracion
a (t) =d[r (t) ur + r (t) θ (t) uθ
]dt
=[r − rθ2
]ur +
[2rθ + rθ
]uθ
Es claro que si r (t) = L = cte
r (t) = Lur ⇒ v (t) =d (Lur)
dt= Lθuθ
y ademas
a (t) =d[Lθ (t) uθ
]dt
= −Lθ2 ur + Lθuθ .
Ası, y para este caso particular, las ecuaciones de Newton quedan como
m a = T +m g ⇒
m ar = −mLθ2 = −T +mg cos (θ)
m aθ = mLθ = −mg sen (θ) .
(7.41)
286

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.14: Amplitud como funcion de la frecuencia excitatriz. Notese el maximo de la amplitud cuando elsistema entra en resonancia, i.e. $ = ω0
El caso mas simple proviene de la suposicion: θ ≈ sen (θ)� 1, que implica lo siguiente
m a = T +m g ⇒
mLθ2 = −T +mg
mLθ = −mgθ.(7.42)
ahora sabemos que podemos integrar inmediatamente. Si suponemos que el sistema parte del reposo: θ (0) = 0y θ (0) = θ0, entonces resulta:
Lθ = −gθ ⇒ θ (t) = C1 sen
(√g
Lt
)+ C2 cos
(√g
Lt
)⇒ θ (t) = θ0 cos
(√g
Lt
)y el perıodo puede ser integrado, ya que:
θθ = − gLθθ ⇒ Etotal ∝ cte = θ2 + 2
g
Lθ2 ⇒ θ (t) =
√g
L(θ2
0 − θ2)
que no es otra cosa que la energıa total del sistema. Por lo tanto, en el instante inicial, si soltamos la masadesde un angulo θ0, la energıa total es puramente potencial. Es decir
Etotal = Epotencial = mgL (1− cos (θ0)) = 2mgLsen2
(1
2θ0
)(7.43)
por otro lado, de la ecuacion (7.6.7) podemos obtener el perıodo de oscilacion para el Pendulo Fısico linea-lizado:
ω = θ (t) =
√g
L(θ2
0 − θ2) ⇒ T =
√L
garctan
(θ√
θ20 − θ2
).
287

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.15: Aproximacion por una parabola en torno a x = 0
Este caso tambien se conoce con el nombre de oscilador armonico simple. Igualmente podemos analizarel caso general del pendulo amortiguado forzado linealizado. Vale decir, una masa, m, atada a una varilla sinmasa de longitud L, y que oscila, inmersa en un fluido que la frena el movimiento de la masa con una fuerza:−η v (t). Y que adicionalmente esta excitada por una fuerza exterior F (t) = F0 cos ($t). Recordamos queen este caso la ecuacion en la direccion tangente (uθ), es
mL θ + η θ +mg θ = F0 cos ($t) ⇒ θ + 2µ θ + ω20 θ =
F0
mLcos ($t)
donde, por costumbre, hemos rebautizado las constantes como: µ =η
2mLy ω0 =
√g
L.
Por lo tanto, como ya vimos con anterioridad, su solucion tendra la forma
θ (t) = C1e
(−(µ+√µ2−ω2
0
)t)
+ C2e
(−(µ−√µ2−ω2
0
)t)
+F0
mL
cos ($t− ζ)√(ω2
0 −$2)2
+ (2µ$)2
donde
cos (ζ) =
(ω2
0 −$2)√
(ω20 −$2)
2+ (2µ$)
2y sen (ζ) =
2µ$√(ω2
0 −$2)2
+ (2µ$)2
Hemos aprendido que dependiendo del valor de los coeficientes de la ecuacion caracterıstica del PenduloFısico amortiguado libre (F0 = 0) se derivan tres casos posibles: el caso Subamortiguado (µ2 − ω2
0 < 0), elSobreamortiguado (µ2 − ω2
0 > 0) y el caso Crıtico (µ2 − ω20 = 0).
En el caso del Pendulo Fısico amortiguado forzado (F0 6= 0) la fısica se hace mucho mas rica y pueden
ocurrir fenomenos de resonancia cuando(ω2
0 −$2)2
+ (2µ$)2 → 0.
Es interesante considerar los graficos tanto de la evolucion del sistema en el espacio directo: θ (t) vs t;como la evolucion del sistema en el espacio de fases ω = θ (t) vs θ (t) . Las figuras (7.19) y (7.21) muestranla primera de estas evoluciones, es decir, la evolucion del angulo en el espacio directo. Las figuras (7.20) y
288

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.16: Diagrama de Cuerpo Libre, del Pendulo Fısico
(7.22) muestran la evolucion del sistema en el espacio de fases. Es claro de la ecuacion (7.6.7), en la cualaparece ω = θ (t), que las curvas en el diagrama de fase tanto para el caso libre (figura(7.18)) como paralos casos amortiguados (figuras(7.20) y (7.22)) corresponden a curvas con la misma energıa. En el caso delPendulo Fısico linealizado libre, corresponden a curvas de energıa constante. En los otros casos el sistemava disipando energıa debido al coeficiente de amortiguacion.
Notese que la disipacion obliga al sistema a evolucionar al punto de equilibrio siguiendo trayectoriasespirales en el espacio de fases. Claramente mas rapidamente en el caso sobreamortiguado que en el su-bamortiguado. Tambien sabemos que para el caso crıtico (µ2 − ω2
0 = 0) el tiempo de evolucion del sistemahasta llegar al punto de equilibrio sera menor que en cualquiera de los casos sobreamortiguados. Dejamos allector la comprobacion de esta ultima afirmacion.
Ahora bien, la situacion que nos interesa simular es la del pendulo fısico para los casos en los cuales losangulos de oscilacion no necesariamente sean pequenos.
Denominaremos pendulo libre al caso en el cual no recurriremos a ninguna aproximacion respecto alangulo de oscilacion. Recordemos que para este caso partimos de la ecuacion (7.41) en la direccion tangente.Es decir
Lθ (t) = −g sen (θ) ⇒ θθ = − gL
sen(θ)θ ⇒ Etotal ∝ cte =θ2
2− g
Lcos(θ)
Al igual que en la ecuacion en la direccion tangente linealizada (7.6.7), nos encontramos con la energıatotal del sistema. Con lo cual es facil despejar θ = θ (θ (t)) y construir los diagramas de fases del sistema.
Otra vez, las lıneas del diagrama de fase seran lıneas de la misma energıa. Ası podemos graficar
θ (t) = ±√C +
2g
Lcos (θ) (7.44)
para distintos valores de la constante C = 4, 01; 4, 1; 6; 8; 10 y 20, para el caso gL = 4.
La Figura (7.23) representa el diagrama de fase para estos casos. Las curvas cerradas (aquellas que tienenlos valores de angulos y velocidades acotadas) representan oscilaciones del sistema, mientras que las curvasabiertas (aquellas en las cuales las velocidades estan acotadas pero no ası el valor del angulo) representan
289

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.17: Evolucion θ (t) vs t del Pendulo Fısico libre, para distintos valores de la velocidad inicialV0 = 3, 5,
√40, 7, 8.
que el sistema rota. Notese que el sistema presenta puntos de equilibrio inestable para θ (t) ≈ ±nπ conn = 0, 1, 2. Lo cual era de esperarse por cuanto corresponde al angulo en el cual el sistema varilla-masa seencuentran verticalmente dispuestos y el peso y la tension son colineales y se anulan momentaneamente.
Otro enfoque, quiza mas intuitivo para resolver este problema, pudo haber sido el analisis energetico.Para ello sabemos que, por ser un sistema conservativo, la energıa total viene definida por
Etotal =1
2mL2θ2︸ ︷︷ ︸
Energıa Cinetica
+mgL (1− cos (θ))︸ ︷︷ ︸Energıa Potencial
≡ 1
2mL2θ2 + 2mgL sen2
(θ
2
)
por consiguiente
θ (t) = ±
√2EtotalmL2
− 4g
Lsen2
(θ
2
)≡ ± 2
√g
L
[sen2
(θmax
2
)− sen2
(θ
2
)](7.45)
donde hemos sustituido Etotal = 2mLsen2(θmax
2
)con θmax, el angulo maximo que alcanza el Pendulo Fısico,
por cuanto en ese punto la energıa total es puramente potencial. Notese que ese angulo no necesariamentees el angulo inicial, debido a que la velocidad inicial puede ser distinta de cero.
La ecuacion (7.45) es claramente integrable por separacion de variables y conduce a encontrar una ex-presion para el perıodo:
t =1
2
√L
g
∫ θ(t)
θ0
dθ√g
L
[sen2
(θmax
2
)− sen2
(θ2
)] con: − π ≤ θ (t) ≤ π y θ0 = θ (0) .
La integral anterior, puede ser transformada en otra que aparece en las tablas integrales, si hacemos
sen(β) =sen(θ2
)sen(θmax
2
) ,290

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.18: Digrama de Fase para el Oscilador Armonico Simple. Notese que el punto de equilibrio es elorigen de coordenadas.
con lo cual:
t =
√L
g
∫ ζ(t)
ζ(0)
dβ√1− sen2
(θmax
2
)sen2(β)
,
donde
sen(β) =sen(θ2
)sen(θmax
2
) , y ζ (t) = arcsin
[sen(θ2
)sen(θmax
2
)] .Es claro que el recorrido entre ζ (0) = 0 ⇒ θ = 0 a θ = θmax ⇒ ζ (t) = π
2 , representa un cuarto delperıodo, por consiguiente el perıodo total del Pendulo Fısico sera:
T = 4
√L
g
∫ π2
0
dβ√1− sen2
(θmax
2
)sen2(β)
7.6.8. Digresion elıptica
En este punto haremos una digresion respecto a las integrales elıpticas, su clasificacion y algunas de suspropiedades. En general encontraran en la bibliografıa que las integrales elıpticas se dividen en
Integrales elıpticas de primera especie
F (ϕ\α) =
∫ ϕ
0
dβ√1− sen2(α)sen2(β)
⇔ F (x|m) =
∫ x
0
dt√(1− t2) (1−mt2)
, con: 0 ≤ m ≤ 1 ,
las cuales, para el caso particular ϕ =π
2o x = 1, se puede reacomodar como una Integral elıptica
de primera especie completa
K (m) =
∫ π2
0
dβ√1−msen2(β)
≡∫ 1
0
dt√(1− t2) (1−mt2)
con: 0 ≤ m ≤ 1 . (7.46)
291

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.19: Evolucion θ (t) vs t del Pendulo Simple, Subamortiguado (g
L= 4;µ = 0, 5) libre,para distintos
valores de la velocidad inicial V0 = 3, 5,√
40, 7, 8.
Integrales elıpticas de segunda especie
E (ϕ\α) =
∫ ϕ
0
√1− sen2(α)sen2(β)dβ ⇔ E (x|m) =
∫ x
0
√1−mt21− t2
dt , con: 0 ≤ m ≤ 1
y si ϕ =π
2o x = 1, entonces se obtiene una Integral elıptica de segunda especie completa
E (m) =
∫ π2
0
√1−m sen2(β)dβ ≡
∫ 1
0
√1−mt2
1− t2dt , con: 0 ≤ m ≤ 1
Adicionalmente, y tambien sin perder generalidad, dado que 0 ≤ m ≤ 1, el denominador de la integralelıptica K (m) de la ecuacion (7.46) puede ser expandido en series de potencias. Con lo cual
1√1−m sen2(β)
= 1 +1
2sen2(β)m+
[3
8sen4(β2)
]m2 +
[5
16sen6(β3)
]m3 +
[35
128sen8(β4)
]m4 + · · ·
=1
2π
[1 +
[(1
2
)sen2(β)
]m+
[(1 · 32 · 4
)sen4(β)
]m2 +
[(1 · 3 · 52 · 4 · 6
)sen6(β)
]m3 + · · ·
]por lo tanto:
1√1−m sen2(β)
=
∞∑n=0
(2n− 1)!
(2n)!!mn sen2n(β) ,
292

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.20: Evolucion θ (t) vs θ (t) del Pendulo Fısico Subamortiguado libre (g
L= 4;µ = 0, 5) en el Espacio
de Fases para distintos valores de la velocidad inicial V0 = 3, 5,√
40, 7, 8. Notese que la disipacion llevairremediablemente al sistema al punto de equilibrio, vale decir al origen de coordenadas del espacio de fases.
y siendo una serie uniformemente convergente puede ser integrada termino a termino como
K (m) =
∫ π2
0
dβ√1−m sen2(β)
=
∫ π2
0
dβ
∞∑n=0
(2n− 1)!!
(2n)!!mnsen2n(β) =
∞∑n=0
(2n− 1)!!
(2n)!!mn
∫ π2
0
sen2n(β) dβ
=
∞∑n=0
(2n− 1)!!
(2n)!!mn
[(2n− 1)!!
(2n)!!· π
2
]=π
2
∞∑n=0
[(2n− 1)!!
(2n)!!
]2
mn .
Del mismo modo se obtiene para las integrales elıpticas completas de segunda especie que
E (m) =
∫ π2
0
√1−m sen2(β)dβ =
π
2
[1−
∞∑n=1
[(2n− 1)!!
(2n)!!
]2mn
2n− 1
].
Finalmente podemos mencionar la relacion de “recurrencia” de Legendre para las Integrales Elıpticascompletas. Ella es
E (m)K (1−m) + E (1−m)K (m)−K (m)K (1−m) =π
2
Las integrales elıpticas de primera y segunda especie, incompletas y completa deben resolverse numeri-camente y tradicionalmente estan tabuladas en algunas tablas integrales5.
En nuestros dıas tambien pueden ser resueltas numericamente utilizando comandos de manipuladoressimbolicos6.
5Abramowitz, M. y Stegun I.A (1964) Handbook of Mathematical Functions Dover, New York6En el caso de MAPLEV se puede proceder directamente evaluando numericamente las integrales a traves del comando
evalf(int(...)) o mediante la funcion de biblioteca EllipticF(z,k) donde z= β es al argumento del seno y k= sen(θ02
)el
parametro (consulte la ayuda de MAPLE para mas detalles).
293

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.21: Evolucion θ (t) vs t del Pendulo Fısico Sobreamortiguado (g
L= 4;µ = 3, 5) libre,para distintos
valores de la velocidad inicial V0 = 3, 5,√
40, 7, 8.
7.6.9. ¿Cuan buena es la aproximacion lineal?
Utilizando la expansion en serie de la Integral Elıptica completa de primera especie (??) del pendulofısico, tendremos que se cumple
T = 4
√L
g
∫ π2
0
dβ√1− sen2
(θmax
2
)sen2(β)
= 4
√L
gF
(π
2\sen2
(θmax
2
))
= 2π
√L
g
∞∑n=0
[(2n− 1)!!
(2n)!!
]2(sen
(θmax
2
))2n
.
Mas aun, dado que
sen
(θmax
2
)=
1
2θmax −
1
48θ3
max +1
3840θ5
max +O(θ7
max
)y que
T0 =2π
ω0= 2π
√L
g
tendremos
T = 2π
√L
g
∞∑n=0
[(2n− 1)!!
(2n)!!
]2 [1
2θmax −
1
48θ3
max +1
3840θ5
max +O(θ7
max
)]2n
≈ T0
[1 +
1
16θ2
max +11
3072θ4
max
].
294

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.22: Fısico Sobreamortiguado libre (g
L= 4;µ = 3, 5) en el Espacio de Fases para distintos valores de
la velocidad inicial V0 = 3, 5,√
40, 7, 8. Notese que la disipacion lleva irremediablemente al sistema al puntode equilibrio, vale decir al origen de coordenadas del espacio de fases.
Si realizamos un estimado de las correcciones al problema lineal que conlleva esta expansion veremosque aun para angulos θmax = π/4 las correcciones son del orden de un pırrico 4 con lo cual la aproximacionlineal resulta bien razonable. Para angulos θmax & 1 las correcciones comienzan a ser significativas y todoeste esfuerzo de integracion empieza a tener sentido.
La siguiente tabla da una idea mas clara de este cambio en el perıodo del pendulo y los errores relativosporcentuales respecto al perıodo del pendulo fısico linealizado T0 = 2π/ω0, cuando se consideran distintosvalores del angulo maximo θmax.
T0 =2π
ω0= 2,83845 θmax =
π
12θmax =
π
6θmax =
π
4θmax =
π
3θmax =
π
2θmax =
2π
3T 2,85066 2,88786 2,95191 3,04617 3,35034 3,89685
ε = 100|T − T0|
T0,42821 1,71109 3,84368 6,81916 15,2786 37,1283
7.6.10. El pendulo fısico: integracion numerica
Tal y como indicamos en la primera seccion de este proyecto, procedemos a convertir una ecuacion desegundo orden en un sistema de dos ecuaciones diferenciales de primer orden. Veamos:
θ (t) = −ω0 sen (θ) =⇒
dθ(t)
dt= ϕ(t)
dϕ(t)
dt= −ω0 sen (θ(t))
con lo cual podemos adimensionalizar de varias formas, dependiendo de las condiciones iniciales del movi-miento. Podemos hacer:
t =t
tfinal=
t
tf
295

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.23: Diagrama de Fase para el Pendulo Fısico.
con lo que 0 ≤ t ≤ 1. Entonces:1
tf
d (·)dt
=d (·)dt
,
y adicionalmente:
ϕ =ϕ
ϕ0, con: ϕ0 =
dθ
dt
∣∣∣∣t=0
6= 0.
De este modo el sistema queda escrito
θ = ϕ(t) ⇒ dθ(t)
dt= ϕ0 tf ϕ(t) ⇒ dθ(t)
dt= Λ ϕ(t)
ϕ = −ω0sen (θ(t)) ⇒ dϕ(t)
dt= −ω
20tfϕ0
sen(θ(t)
)⇒ dϕ(t)
dt= −Γ sen
(θ(t)
)Notese que las cantidades ϕ(t), θ(t), t,Γ y Λ son adimensionales. Acto seguido procedemos a integrar
numericamente el sistema de ecuaciones7.La figura 7.24 ilustra la evolucion del angulo θ (t) vs t, con 0 ≤ t ≤ 10 del Pendulo Fısico, para distintos
valores de la velocidad angular inicial:
dθ(t)
dt= θ(t) = ϕ(t) = 3.5, 3.9, 4.0, 4.1, 4.5.
Mientras que la figura 7.25 (y tambien la figura 7.23) representan la evolucion del sistema en el espacio
de fases θ (t) vs dθ(t)dt = ϕ(t), las curvas cerradas en esta grafica corresponden a las curvas oscilantes de la
figura 7.24. Dado que el sistema parte de θ0 = θ (t = 0) y seleccionamos el nivel de energıa potencial igual acero allı, cada una de estas curvas representan un valor de la energıa cinetica inicial.
7En MAPLEV podemos integrar el sistema de dos maneras distintas. La primera haciendo uso del comandodsolve({sysED,CI}, numeric, vars, options) donde sysED es el sistema de ecuaciones diferenciales, CI sus condiciones ini-ciales. Si necesitaramos un analisis grafico es mucho mas util el paquete DEtools.
296

Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.24: Integracion numerica (θ(t)
vs t, con 0 ≤ t ≤ 10) del Pendulo Fısico, para distintos valores de
la velocidad angular inicial:dθ(t)
dt= ϕ(t) = 3,5, 3,9, 4, 4,1, 4,5.
El caso
Ec =1
2mL2θ2
0 = mg2L ,
corresponde a la “separatrız”, vale decir, la orbita que separa las curvas cerradas de las abierta. Es claro queen este caso le movil “subira” y alcanzara un equilibrio inestable en la posicion vertical.
En la figura 7.24 este caso viene ilustrado por la curva que se convierte en horizontal 0, 25 ≤ t ≤ 0, 5,luego a partir de t ≈ 0, 5, la inexactitud del calculo numerico genera perturbaciones que en teorıa no debieranexistir.
7.6.11. Ejemplos
7.6.12. Practicando con Maxima
7.6.13. Ejercicios
297
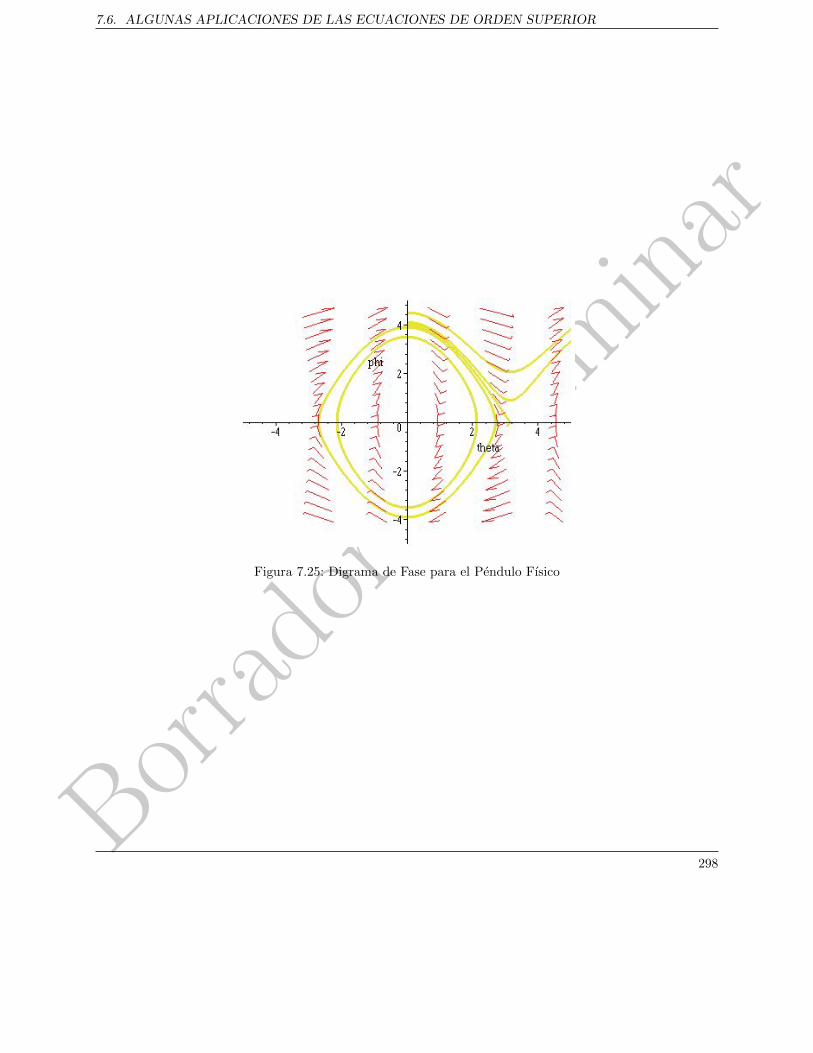
Borra
dor Pre
limin
ar
7.6. ALGUNAS APLICACIONES DE LAS ECUACIONES DE ORDEN SUPERIOR
Figura 7.25: Digrama de Fase para el Pendulo Fısico
298

Borra
dor Pre
limin
arCapıtulo 8Sistemas de ecuaciones diferenciales
299

Borra
dor Pre
limin
ar
8.1. ALGUNOS COMENTARIOS INICIALES
8.1. Algunos comentarios iniciales
Cuando consideramos la evolucion de sistemas con varios grados de libertad o con varias partıculas, na-turalmente arribamos al tratamiento de sistemas de ecuaciones diferenciales. En estos sistemas encontramosvarias variables dependientes de una sola variable independiente. El mas natural de los ejemplos es el casode un sistema de partıculas que se mueve en el espacio bajo la accion de fuerzas externas:
F1
(r1 (t) , r2 (t) , · · · , rn (t) ,
dr1 (t)
dt,
dr2 (t)
dt, · · · , drn (t)
dt, t
)=
d2r1 (t)
dt2
F2
(r1 (t) , r2 (t) , · · · , rn (t) ,
dr1 (t)
dt,
dr2 (t)
dt, · · · , drn (t)
dt, t
)=
d2r2 (t)
dt2
......
Fn
(r1 (t) , r2 (t) , · · · , rn (t) ,
dr1 (t)
dt,
dr2 (t)
dt, · · · , drn (t)
dt, t
)=
d2rn (t)
dt2
Por otro lado, es importante acotar de que existe la posibilidad de convertir una ecuacion diferencialordinaria de orden superior es un sistema equivalente de ecuaciones diferenciales. Es decir, dada una ecuaciondiferencial de la forma
y(n) (x) = F(y(n−1) (x) , y(n−2) (x) , , · · · y′′′ (x) , y′′ (x) , y′ (x) , y (x) , x
)si hacemos el siguiente cambio variable
un = y(n−1) (x) ; un−1 = y(n−2) (x) ; · · · u4 = y′′′ (x) ; u3 = y′′ (x) ; u2 = y′ (x) ; u1 = y (x)
entonces construir el siguiente sistema de ecuaciones diferenciales
u′n(x) = Fn (un, un−1, · · · , u3, u2, u1, x)
u′n−1(x) = y(n−1) (x)
...
u′3(x) = y′′′ (x)
u′2(x) = y′′ (x)
u′1(x) = y′ (x)
que puede ser generalizado a:
u′n(x) = Fn (un, un−1, · · · , u4, u3, u2, u1, x)
u′n−1(x) = Fn−1 (un, un−1, · · · , u4, u3, u2, u1, x)
......
u′2(x) = F2 (un, un−1, · · · , u4, u3, u2, u1, x)
u′1(x) = F1 (un, un−1, · · · , u4, u3, u2, u1, x)
Para garantizar que existe solucion al problema de valores iniciales se debe imponer algunas restriccionessobre las funciones Fi (un, · · · , u3, u2, u1, t) para ello existen un par de teoremas que garantice esa solucion
300

Borra
dor Pre
limin
ar
8.1. ALGUNOS COMENTARIOS INICIALES
Teorema: Sean las funciones F1,F2, · · ·Fn y sus derivadas:
∂1F1, ∂1F2, · · · ∂1Fn, · · · ∂iF1, ∂iF2, · · · ∂jFn · · · ∂nF1, ∂nF2, · · · ∂nFn
continuas en una region R del espacio (x, u1, u2, · · · , un), que contiene al punto(x0, u
01, u
02, · · · , u0
n
)que
caracteriza las condiciones iniciales. Entonces existe un intervalo |x−x0| < h en el cual existe una unicasolucion: u1 = φ1 (x) , u2 = φ2 (x) , · · · , un = φn (x).
Hemos denotado ∂jFi =∂Fi∂uj
y u0m = um (x0) las condiciones iniciales.
Teorema: Sea el siguiente sistema lineal de ecuaciones diferenciales
u′1 = p11 (x) u1 + p12 (x) u2 + · · ·+ p1n (x) un + g1 (x)
u′2 = p21 (x) u1 + p22 (x) u2 + · · ·+ p2n (x) un + g2 (x)
......
u′n = pn1 (x) u1 + pn2 (x) u2 + · · ·+ pnn (x) un + gn (x) (8.1)
Si p11 (x) , p12 (x) , · · · p1n (x) · · · pij (x) · · · pnn (x) y g1 (x) · · · gn (x) son funciones continua en el intervaloα < x < β que contiene al punto x = x0 entonces existe una unica solucion que satisface las condicionesiniciales u0
m = um (x0).
Por ejemplo: dada la siguiente ecuacion diferencial de tercer orden, no lineal
y′′′ = 3xy′ − y2y′′ , con: y(0) = 1, y′(0) = −1, y′′(0) = 2 ,
Por el hecho de ser no lineal, los metodos anteriormente vistos no pueden ser aplicados aquı. Pero podemosconstruir un sistema de ecuaciones diferenciales equivalente a la ecuacion anterior. Consideramos que y(x)es una solucion de la ecuacion diferencial dada y definamos las siguientes cantidades:
y(x) = u1(x)
y′(x) = u′1(x) = u2(x)
y′′(x) = u′′1(x) = u′2(x) = u3(x)
y′′′(x) = u′′′1 (x) = u′′2(x) = u′3(x)
por lo tanto, la ecuacion diferencial dada se puede escribir como:
y′′′ = 3xy′ − y2y′′ ⇒ u′3 = 3xu2 − u21u3 ,
ahora, el sistema de ecuaciones de primer orden equivalente a la ecuacion diferencial problema es:
u′1(x) = u2(x)
u′2(x) = u3(x)
u′3(x) = 3xu2 − u21u3
que debemos resolver para el conjunto de condiciones iniciales:
u1(0) = y(0) = 1, u2(0) = y′(0) = −1, u3(0) = y′′(0) = 2 ,
por lo tanto, la funcion u1(x) que satisface este ultimo sistema sera la solucion de la ecuacion diferencial denuestro problema. Es necesario entonces tener la capacidad de resolver sistemas de ecuaciones diferencialesde primer orden y a este cometido nos dedicaremos a continuacion.
301

Borra
dor Pre
limin
ar
8.1. ALGUNOS COMENTARIOS INICIALES
8.1.1. Notacion matricial
El sistema lineal antes mencionado, es decir, las ecuaciones (8.6), puede condensarse en la siguienteecuacion matricial
u′(x) = P (x) u(x) + g (x) , (8.2)
en la cual estamos representando
u′ =
u′1(x)u′2(x)
...u′n(x)
; P =
p11 (x) p12 (x) · · · p1n (x)p21 (x) p22 (x) · · · p2n (x)
......
. . ....
pn1 (x) pn2 (x) · · · pnn (x)
; u =
u1(x)u2(x)
...un(x)
; g =
g1 (x)g2 (x)
...gn (x)
El sistema (8.2) sera homogeneo si g (x) = 0, en caso contrario sera un sistema no homogeneo.
8.1.2. Sistemas lineales homogeneos
Dado un sistema de ecuaciones diferenciales con coeficientes constantes, es decir, de la forma
y′(x) = Ay(x) , (8.3)
procedemos de manera analoga al caso de una sola ecuacion con coeficientes constantes.Se considera una solucion de prueba de la forma: y = ξerx, donde r y el vector constante ξ son elementos
a determinar. Al sustituir esta solucion en (8.3), obtenemos: ξrerx = Aξerx, con lo cual, el problema sereduce a la busqueda de los autovalores y autovectores del sistema Aξ = rξ.
En forma de matrices, la ecuacion (8.3) es:y′1y′2...y′n
=
a11 a12 · · · a1n
a21 a22 · · · a2n
......
. . ....
an1 an2 · · · ann
y1
y2
...yn
⇒
y1 (x)y2 (x)
...yn (x)
= erx
ξ1ξ2...ξn
con aij , y ξi como constantes.
Por lo tanto:Aξ = rξ ⇒ (A− rI) ξ = 0 ,
en forma de matrices, esto es:a11 − r a12 · · · a1n
a21 a22 − r · · · a2n
......
. . ....
an1 an2 · · · ann − r
ξ1ξ2...ξn
=
00...0
(8.4)
Es decir, para resolver el sistema de ecuaciones diferenciales lineales con coeficientes constantes, es nece-sario resolver el sistema de ecuaciones algebraico.
Por ejemplo, resolvamos el siguiente sistema de ecuaciones
y′1(x) = y1(x) + y2(x)
y′2(x) = 4y1(x) + y2(x)
302

Borra
dor Pre
limin
ar
8.1. ALGUNOS COMENTARIOS INICIALES
este sistema se puede representar de la siguiente forma
y′ =
(1 14 1
)y si y = ξerx ⇒
(1− r 1
4 1− r
)(ξ1ξ2
)=
(00
)primero que todo se calculan los autovalores:∣∣∣∣ 1− r 1
4 1− r
∣∣∣∣ = (1− r)2 − 4 = r2 − 2r − 3 = 0 ⇒
r1 = 3
r2 = −1
para el autovalor r1 = 3, (8.4) resulta en
−2 ξ(1)1 + ξ
(1)2 = 0 ⇒ ξ(1) =
(ξ
(1)1
2ξ(1)1
)=
(12
)similarmente, para el segundo autovalor r2 = −1, se tiene
ξ(2) =
(ξ
(2)1
−2ξ(2)1
)=
(1−2
)por lo tanto, la solucion general del sistema sera
y = C1 y(1) (x) + C2 y(2) (x) ⇐⇒(y1
y2
)= C1
(12
)e3x + C2
(1−2
)e−x
Obviamente el wronskiano de esta solucion
W[y(1) (x) ,y(2) (x)
]=
∣∣∣∣ e3x e−x
2e3x −2e−x
∣∣∣∣ = −4e−2x 6= 0
garantiza que las dos soluciones son linealmente independientes.Para el caso de matrices hermıticas, A = A†, vale decir, que la matriz A coincide con su conjugada y
traspuesta, A =(AT)∗
, todos los autovalores son reales y la solucion general para un sistema de n ecuacionesdiferenciales lineales con coeficientes constantes es
y (x) = C1 ξ(1)er1x + C2 ξ(2)er2x + · · ·+ Cn ξ(n)ernx .
Para el caso particular de matrices simetricas (hermıticas reales) los autovalores r1, r2, · · · , rn y los
autovectores ξ(1), ξ(2), · · · , ξ(n) resultan ser ambos reales.Consideremos ahora el caso cuando la matrix A no es hermıtica pero real. Entonces
y′ = Ay ⇒ y = ξerx ⇒ (A− rI) ξ = 0 ⇒
r1 = λ+ iµ
r2 = λ− iµ
esto significa que r1 = r∗2 y que ξ(1) =(ξ(2)
)∗, por lo cual ξ(1) = a + ib con a y b vectores reales, entonces:
y(1)(x) = (a + ib) e(λ+iµ)x = (a + ib) eλx [cos(µx) + i sen(µx)]
= eλx [a cos(µx)− b sen(µx)] + ieλx [a sen(µx) + b cos(µx)]
= u (x) + iv (x) .
303

Borra
dor Pre
limin
ar
8.1. ALGUNOS COMENTARIOS INICIALES
Es posible que se nos presente la siguiente situacion: por un lado, algunos de los autovalores de la matrizreal, A, son numeros complejos, r1 = λ+ iµ y r2 = λ− iµ, pero el resto de las raıces resultan ser numerosreales: r3, r4, · · · , rn. Por el otro lado, algunos de los autovectores son complejos: ξ(1) = a+ib, ξ(2) = a−ib,pero el resto de autovectores no lo son: ξ(3), ξ(4), · · · , ξ(n).
En este caso, la solucion general sera
y (x) = C1u (x) + iC2v (x) + C3ξ(3)er3x + C4ξ
(4)er4x + · · ·+ Cnξ(n)ernx .
Queremos resolver el siguiente sistema de ecuaciones
y′1(x) = y1(x)− y2(x)
y′2(x) = 5y1(x)− 3y2(x)
En forma de matrices lo que tenemos es
y′ = Ay ⇒ y′ =
(1 −15 −3
)y
Si utilizamos la siguiente solucion de prueba y = ξerx , entonces:(1− r −1
5 −3− r
)(ξ1ξ2
)=
(00
)Se calculan los autovalores
∣∣∣∣ 1− r −15 −3− r
∣∣∣∣ = r2 + 2r + 2 = 0 ⇒
r1 = −1 + i
r2 = −1− i⇒
ξ(1) =
(1
2− i
)
ξ(2) =
(1
2 + i
)finalmente la solucion general sera
y(x) = C1 e−x(
cos(x)2 cos(x) + sen(x)
)+ iC2 e
−x(
sen(x)− cos(x) + 2sen(x)
).
En el caso que los autovalores de la matriz real, A, esten repetidos k veces, es decir: r1 = r2 = · · · = rk = ρ,y para los restantes rk+1, . . . , rn distintos, se debe considerar algunos puntos. Lo primero es notar que
puede suceder que existan ξ(1), ξ(2), . . . , ξ(k) autovectores linealmente independientes asociados al autovalorρ de multiplicidad k. Entonces, el conjunto de vectores linealmente independientes siguientes: y(1)(x) =
ξ(1)eρx,y(2)(x) = ξ(2)eρx, . . . ,y(k)(x) = ξ(k)eρx seran soluciones del sistema de ecuaciones diferenciales(8.3). Pero si la matrix A no es hermıtica existira un numero menor de autovectores correspondientes alautovalor ρ de multiplicidad k y no sera posible tener entonces las k soluciones necesarias del sistema (8.3).Por lo tanto, se necesitara construir las soluciones que falten de alguna manera.
Quizas sea conveniente detenerse en un ejemplo particular. Dado el sistema:
y′1(x) = y1(x)− y2(x)
y′2(x) = y1(x) + 3y2(x) ,
por lo tanto
y′ = Ay ⇒ y′ =
(1 −11 3
)y .
304

Borra
dor Pre
limin
ar
8.1. ALGUNOS COMENTARIOS INICIALES
Si repetimos el procedimiento anterior, se tiene que(1− r −1
1 3− r
)(ξ1ξ2
)=
(00
),
calculamos los autovalores:∣∣∣∣ 1− r −11 3− r
∣∣∣∣ = r2 − 4r + 4 = (r − 2)2 = 0 ⇒
r1 = 2
r2 = 2⇒ ξ(1) =
(1−1
),
y podemos ver que la multiplicidad es 2 y solo podemos obtener un unico autovector asociado al autovalorρ = r1 = r2 = 2. Con este autovector podemos construir una solucion linealmente independiente:
y(1)(x) = e2x
(1−1
).
Resulta natural intentar buscar una segunda solucion que contenga los terminos xe2x y e2x.Propongamos entonces la siguiente solucion de prueba
y(2)(x) = ζ(1)xe2x + ζ(2)e2x ,
donde ζ(1) y ζ(2) son vectores constantes a determinar.Al sustituir esta solucion de prueba en nuestra ecuacion problema, resulta:
2ζ(1)xe2x +(ζ(1) + 2ζ(2)
)e2x = A
(ζ(1)xe2x + ζ(2)e2x
),
(2I−A) ζ(1)xe2x +(ζ(1) + 2ζ(2) −Aζ(2)
)e2x = 0 .
Al igualar los coeficientes de los terminos xe2x y e2x en esta ultima expresion tenemos el siguiente parde ecuaciones de autovalores:
(A− 2I)ζ(1) = 0
(A− 2I)ζ(2) = ζ(1)
La primera ecuacion es satisfecha si hacemos coincidir ζ(1) = ξ(1), es decir, con el autovector correspon-diente a ρ = 2 que calculamos anteriormente. Por otro lado, se tiene que
|A− 2I| =∣∣∣∣ −1 −1
1 1
∣∣∣∣ = 0 ,
pero sin embargo, la segunda ecuacion tiene solucion(−1 −1
1 1
)(ζ
(2)1
ζ(2)2
)=
(1−1
).
Como las filas son proporcionales, entonces resulta que:
−ζ(2)1 − ζ(2)
2 = 1 ⇒ ζ(2) =
(0−1
)+ κ
(1−1
)
305

Borra
dor Pre
limin
ar
8.1. ALGUNOS COMENTARIOS INICIALES
donde κ es un valor arbitrario. Hemos construido ası una segunda solucion
y(2)(x) =
(1−1
)xe2x +
(0−1
)e2x + κ
(1−1
)e2x ,
notemos que el ultimo termino de la ecuacion anterior es un multiplo del unico termino de y(1)(x), por lotanto debe ser ignorado.
En resumen, las dos soluciones linealmente independientes son:
y(1)(x) = e2x
(1−1
),
y(2)(x) =
(1−1
)xe2x +
(0−1
)e2x ,
Se deja como ejercicio demostrar que W[y(1)(x),y(2)(x)
]6= 0.
La solucion general, sera entonces
y(x) = C1
(1−1
)e2x + C2
[(1−1
)xe2x +
(0−1
)e2x
].
8.1.3. Sistemas lineales inhomogeneos
Todo operador lineal hermıtico A (A : V → V ), con n autovectores distintos tiene una representacionmatricial diagonal Aij=λiδij . Mediante una transformacion de similidaridad: TAT−1 = A, donde T es una
matriz unitaria: T−1 = T†, se trasforma la base de A a la base donde A es diagonal.Este teorema es claro: a partir de que sı A tiene n autovalores distintos, tiene n autovectores linealmente
independientes los cuales forman una base de V y en la cual la representacion matricial de A es diagonal.Pero como siempre es posible pasar de A no diagonal a A diagonal con los mismos autovalores medianteuna transformacion de similidaridad TAT−1 = A, esto queda demostrado. Lo anterior puede formalizarsede la siguiente manera:
〈vi|T†T︸︷︷︸1
AT†T︸︷︷︸1
|vj〉 = 〈vi|T†︸ ︷︷ ︸〈ui|
TAT†︸ ︷︷ ︸A
T |vj〉︸ ︷︷ ︸|uj〉
= 〈ui| A |uj〉 = λj 〈ui |uj〉 = λjδij .
Nos queda determinar la forma de la matriz unitaria de transformacion T. Para ello seleccionamos labase canonica {|e1〉 , |e2〉 , . . . , |ei〉 , . . . , |en〉} como base de partida de A:
|e1〉 =
10...0...0
, |e2〉 =
01...0...0
, . . . , |ei〉 =
00...1...0
, . . . , |en〉 =
00...0...1
,
y {|u1〉 , |u2〉 , . . . , |ui〉 , . . . , |un〉} la base de autovectores en la cual A es diagonal. Por lo tanto T es la matrizde transformacion de una base a la otra. Identificando columna a columna nos damos cuenta que las columnasde la matriz T son los autovectores de A
|ui〉 =
n∑j=1
Tij |ej〉 ⇒ 〈ej |ui〉 = 〈ejn∑j=1
Tij |ej〉 ,
306

Borra
dor Pre
limin
ar
8.1. ALGUNOS COMENTARIOS INICIALES
esto es:
〈ej |ui〉 = Tij =
u
(1)1 u
(1)2 · · · u
(1)n
u(2)1 u
(2)2 u
(2)n
.... . .
u(n)1 u
(n)2 u
(n)n
⇔ T† =
u
(1)1 u
(2)1 · · · u
(n)1
u(1)2 u
(2)2 u
(n)2
.... . .
u(1)n u
(1)n u
(n)n
= T−1 ,
donde hemos denotado u(m)i la componente m del vector j-esimo en la base |ei〉, con i = 1, . . . , n.
Por lo tanto, si los n autovalores y autovectores de A son distintos y conocidos, A se dice diagonalizable.Si A es hermıtica, T−1 = T† es muy facil construir la inversa de la matriz de transformacion T. Si losautovalores de A con degenerados, vale decir si el numero de autovectores linealmente independientes esmenor que n, entonces A no es diagonalizable y no existe una matriz de transformacion T (T no tieneinversa) tal que TAT−1 = A.
Ocupemonos ahora del problema de la solucion de un sistema de ecuaciones diferenciales no homogeneode la forma:
y′ (x) = Ay (x) + g (x) ,
con:
A =
a11 a12 · · · a1n
a21 a22 a2n
.... . .
an1 an2 · · · ann
, y(x) =
y(1)(x)y(2)(x)
...y(n)(x)
, g (x) =
g(1) (x)g(2) (x)
...g(n) (x)
donde A es una matriz constante y diagonalizable, g (x) contınua en el intervalo α ≤ x ≤ β.
La solucion de este problema pasa por encontrar los autovalores {λi} y autovectores {|ui〉} de A, construira partir de ellos la matriz T y su hermıtica conjugada T−1 = T†, y a partir de ella hacer el siguiente cambiode variable:
y (x) = Tz (x) ⇒ Tz′ = ATz + g ⇒ z′ = T−1AT︸ ︷︷ ︸A
z + T−1g ,
por lo tantoz′ = Az + h ,
donde
A =
λ1 0 · · · 00 λ2 0...
. . .
0 0 · · · λn
y h = T−1g .
Entonces, lo que tenemos ahora es un sistema de ecuaciones diferenciales desacoplado:
z′i (x) = λizi (x) + hi (x) .
Por ejemplo, encontremos la solucion general del siguiente sistema:
y′1(x) = −2y1(x) + y2(x) + 2e−x
y′2(x) = y1(x)− 2y2(x) + 3x .
En notacion matricial:
y′ =
(−2 1
1 −2
)y +
(2e−x
3x
)⇒ y′ = Ay + g(x) .
307

Borra
dor Pre
limin
ar
8.1. ALGUNOS COMENTARIOS INICIALES
Donde los autovalores y autovectores de A son
λ1 = −3 , ξ1 =
(1−1
)y λ2 = −1 , ξ2 =
(11
)⇒ yh(x) = C1
(1−1
)e−3x + C2
(11
)e−x ,
y donde yh(x) es la solucion general de la homogenea.Como A es real y simetrica, construimos la matriz T facilmente con los autovectores normalizados. Esto
es:
T =1√2
(1 1−1 1
)⇒ T−1 =
1√2
(1 −11 1
).
Ahora cambiando variables y = Tz tendremos el siguiente sistema de ecuaciones
z′ = Az + h ⇒(z′1z′2
)=
(−3 00 −1
)(z1
z2
)+
1√2
(2e−x − 3x2e−x + 3x
),
con lo cual podemos escribir el sistema desacoplado de ecuaciones lineales de primer orden
z′1 + 3z1 =√
2e−x − 3√2x y z′2 + 3z2 =
√2e−x +
3√2x .
Como ya sabemos, la solucion es inmediata
z1(x) =
√2
2e−x − 3√
2
(x
3− 1
9
)+ C1e
−3x y z2(x) =√
2xe−x +3√2
(x− 1) + C2e−x
y devolviendo el cambio de variables tenemos que
y = Tz ⇒ y =1√2
(z1 + z2
−z1 + z2
).
Vemos que
1√2
(z1 + z2) =C1√
2e−3x +
(C2√
2+
1
2
)e−x + x− 4
3+ xe−x
1√2
(−z1 + z2) = −C1√2e−3x +
(C2√
2− 1
2
)e−x + 2x− 5
3+ xe−x .
Si utilizamos unas nuevas constantes: C1 = C1√2
y C2 = C2√2, resulta que podemos escribir la solucion de la
forma:
y = C1(
1−1
)e−3x + C2
(11
)e−x +
1
2
(1−1
)e−x +
(11
)xe−x +
(12
)x− 1
3
(45
).
De esta solucion es facil reconocer que los primeros dos terminos se corresponden a la solucion del sistemahomogeneo y los restantes terminos tienen que ver con una solucion particular del sistema inhomogeneo.
8.1.4. Ejemplos
8.1.5. Practicando con Maxima
8.1.6. Ejercicios
1. Encuentre un sistema de ecuaciones diferenciales de primer orden equivalente para las siguientes ecua-ciones
a) y′′ − 3x2yy′ = 0 b) y′′′ − 2x(y′)2 + 3xy′′ − xy = 0
308

Borra
dor Pre
limin
ar
8.2. SISTEMAS DE ECUACIONES DIFERENCIALES Y EL USO DE OPERADORES
2. Encuentre la solucion general de los siguientes sistemas de dos ecuaciones diferenciales
a) y′1 = 3y1 − 2y2 , y′2 = 2y1 − 2y2
b) y′1 = y1 − 2y2 , y′2 = 3y1 − 4y2
c) y′1 = 2y1 − y2 , y′2 = 3y1 − 2y2
d) y′1 = y1 + y2 , y′2 = 4y1 − 2y2
3. Encuentre la solucion general de los siguientes sistemas de tres ecuaciones diferenciales
a) y′1 = y1 + y2 + 2y3 , y′2 = y1 + 2y2 + y3 , y′3 = 2y1 + y2 + y3
b) y′1 = 3y1 + 2y2 + 4y3 , y′2 = 2y1 + 2y3 , y′3 = 4y1 + 2y2 + 3y3
c) y′1 = y1 + y2 + y3 , y′2 = 2y1 + y2 − y3 , y′3 = −8y1 − 5y2 − 3y3
d) y′1 = y1 − y2 + 4y3 , y′2 = 3y1 + 2y2 − y3 , y′3 = 2y1 + y2 − y3
4. Encuentre la solucion general de los siguientes sistemas de ecuaciones diferenciales
a) y′1 = 2y1 − y2 + ex , y′2 = 3y1 − 2y2 + x
b) y′1 = y1 +√
3y2 + ex , y′2 =√
3y1 − y2 +√
3ex
c) y′1 = 2y1 − 5y2 − cos(x) , y′2 = y1 − 2y2 + sen(x)
d) y′1 = y1 + y2 + e−2x , y′2 = 4y1 − 2y2 − 2ex
8.2. Sistemas de ecuaciones diferenciales y el uso de operadores
En clases anteriores resolvimos algunos sistemas de ecuaciones diferenciales sacandole provecho a lanotacion matricial. Sin embrago, algunos sistemas son tan simples que tienen un metodo casi directo parasu resolucion, como podemos ver a continuacion:
Dado el siguiente sistema de ecuaciones diferenciales
x = 2e2t
y =x2 − yt
. t 6= 0 .
Rapidamente nos damos cuenta que la primera ecuacion puede ser integrada de manera directa:
dx
dt= 2e2t ⇒ x(t) = e2t + C1
al sustituir este resultado en la segunda ecuacion:
dy
dt=
(e2t + C1
)2 − yt
⇒ dy
dt+y
t=e4t + 2C1e
2t + C21
t,
esta ultima ecuacion es lineal en y, por lo tanto la sabemos resolver:
y(t) =14e
4t + C1e2t + C2
1 t+ C2
t, t 6= 0 .
309

Borra
dor Pre
limin
ar
8.2. SISTEMAS DE ECUACIONES DIFERENCIALES Y EL USO DE OPERADORES
Anteriormente vimos algunas ventajas que aparecen por el hecho de utilizar la notacion de operadorespara encontrar una solucion de una ecuacion diferencial lineal de orden n. Recordemos que una ecuaciondiferencial lineal de orden n con coeficientes constantes se podıa escribir de la siguiente manera:
P (D)y = Q(x) . (8.5)
dondeP (D) = a0 + a1D + a2D
2 + · · ·+ anDn , an 6= 0 .
con: a2, a1, a2, . . . , an constantes.En el caso de sistemas lineales de ecuaciones diferenciales podemos tambien hacer uso de esta notacion:
P11(D)y1 + P12(D)y2 + P13(D)y3 + · · ·+ P1n(D)yn = Q1 (x)
P21(D)y1 + P22(D)y2 + P23(D)y3 + · · ·+ P2n(D)yn = Q2 (x)
......
Pn1(D)y1 + Pn2(D)y2 + Pn3(D)y3 + · · ·+ Pnn(D)yn = Qn (x) . (8.6)
La solucion del sistema (8.6) es el conjunto de funciones: {yn(x)}, cada una de ellas definidas en unintervalo comun I.
Por ejemplo, para el siguiente sistema se tiene
2y′1(x) + 3y1(x) + 5y′2(x)− y2(x) = ex
y′1(x)− y1(x) + 3y′2(x) + y2(x) = sen(x)⇒
(2D + 3)y1 + (5D− 1)y2 = ex
(D− 3)y1 + (3D + 1)y2 = sen(x)
Notemos tambien que el sistema (8.6) es un caso mas general a los estudiados anteriormente, que erande la forma:
y′(x) = P (x) y(x) + g (x) .
Por cuestiones netamente didacticas nos detendremos en el caso n = 2, entendiendo que los resultadosaquı obtenidos pueden extrapolarse para cualquier valor de n.
Cuando n = 2, tenemos entonces:
P11(D)y1 + P12(D)y2 = Q1 (x)
P21(D)y1 + P22(D)y2 = Q2 (x) . (8.7)
Estos sistemas al resolverse para las funciones incognitas deben contener un numero apropiado de cons-tantes y para tal fin existe un teorema que garantiza el numero correcto de constantes que deben aparecer.
Teorema: El numero de constantes arbitrarias que deben aparecer en la solucion del sistema (8.7) debeser igual al orden de la siguiente expresion:
∆ ≡ P11(D)P22(D)− P12(D)P21(D) (8.8)
con: ∆ 6= 0.
Si se da el caso que ∆ = 0, se dice que el sistema es degenerado. Notemos ademas que (8.8) tiene la formade un determinante.
310

Borra
dor Pre
limin
ar
8.2. SISTEMAS DE ECUACIONES DIFERENCIALES Y EL USO DE OPERADORES
Caso no degenerado: ∆ 6= 0
El sistema (8.7) puede ser tratado como un sistema de ecuaciones algebraico. Esto significa que podemosmanipular las filas a nuestra conveniencia para obtener su solucion o utilizar cualquier tecnica para laresolucion de sistemas de ecuaciones algebraicas desarrollado en cursos anteriores.
Veamos un ejemplo:
2x− x+ y + 4y = 1
x− y = t− 1 .
Tal vez sea conveniente adaptar el problema a nuestra notacion, es decir, hacemos los siguientes cambios:x(t) = y1(x) y y(t) = y2(x). Por lo tanto:
2y′1(x)− y1(x) + y′2(x) + 4y1(x) = 1
y′1(x)− y′2(x) = x− 1 .
En la notacion del operador diferencial serıa:
(2D− 1)y1 + (D + 4)y2 = 1
Dy1 −Dy2 = x− 1 .
Multipliquemos la primera ecuacion por D y la segunda por D + 4:
(2D2 −D)y1 + (D2 + 4D)y2 = D[1]
(D2 + 4D)y1 − (D2 + 4D)y2 = (D + 4)[x− 1] .
Luego las sumamos para obtener:
(3D2 + 3D)y1 = 0 + D[x− 1] + 4(x− 1) = 1 + 4x− 4 = 4x− 3 ,
esto significa que debemos resolver la siguiente ecuacion
3y′′1 + 3y′1 = 4x− 3 ,
con la ayuda de algunos de los metodos anteriormente vistos se obtiene la respectiva solucion:
y1(x) = C1 + C2e−x +
2
3x2 − 7
3x .
Al sustituir y1(x) en la segunda ecuacion del sistema resulta:
D
[C1 + C2e
−x +2
3x2 − 7
3x
]−Dy2 = x− 1
−C2e−x +
4
3x− 7
3−Dy2 = x− 1
−C2e−x +
1
3x− 4
3−Dy2 = 0 ,
por lo tanto:
y′2 = −C2e−x +
1
3x− 4
3⇒ y2(x) = C2e
−x +1
6x2 − 4
3x+ C3 .
311

Borra
dor Pre
limin
ar
8.2. SISTEMAS DE ECUACIONES DIFERENCIALES Y EL USO DE OPERADORES
Ahora podemos estudiar el tema del numero de constantes que deben aparecer. Del teorema anteriorvemos que el determinate
∆ = (2D− 1)(−D)− (D)(D + 4) = −3D2 − 3D ,
es de orden 2. Por lo tanto, segun el teorema antes mencionado deben existir unicamente dos constantes.Esto significa que tenemos una constante demas. Podemos hallar una relacion entre las constantessustituyendo las dos soluciones encontradas en la primera ecuacion del sistema, recordemos la la segundaecuacion ya fue utilizada para encontrar y2(x). Esto es:
(2D− 1)
[C1 + C2e
−x +2
3x2 − 7
3x
]+ (D + 4)
[C2e
−x +1
6x2 − 4
3x+ C3
]= 1
−6− C1 + 4C3 = 1 ⇒ C3 =C1 + 7
4.
Por lo tanto, la solucion al sistema sera:
y1(x) = C1 + C2e−x +
2
3x2 − 7
3x
y2(x) = C2e−x +
1
6x2 − 4
3x+
C1 + 7
4.
Caso degenerado: ∆ = 0
Como puede suceder para los sistemas algebraicos el sistema de ecuaciones puede ser degenerado, esdecir, podra tener infinitas soluciones o no tener solucion, por ejemplo, el sistema:
2x+ 3y = 5
2x+ 3y = 7 ,
no tiene solucion. Y el sistema
2x+ 3y = 0
4x+ 6y = 0 ,
tiene infinitas soluciones. En ambos casos, el determinante conformado por los coeficientes de x y de yes cero. Notemos tambien que para el primer sistema, si despejamos y de la segunda ecuacion
y =7− 2x
3,
y la sustituimos en la primera resulta:
2x+ 3
[7− 2x
3
]= 5 ⇒ 7 = 5 ,
no existe solucion cuando el sistema no se reduce a una igualdad.
Si hacemos lo mismo con el segundo sistema, despejamos y en una
y = −2x
3,
312

Borra
dor Pre
limin
ar
8.2. SISTEMAS DE ECUACIONES DIFERENCIALES Y EL USO DE OPERADORES
y la sustituimos en la otra
2x+ 3
[−2x
3
]= 0 ⇒ 0 = 0 .
Existen infinitas soluciones si el sistema se reduce a una igualdad del tipo 0 = 0.
Con los sistemas de ecuaciones diferenciales pasa lo mismo. Veamos un par de ejemplos.
El sistema
Dy1 −Dy2 = x
Dy1 −Dy2 = x2 .
es degenerado porque −D2 − (−D2) = 0. Si despejamos Dy1 de la segunda ecuacion
Dy1 = Dy2 + x2 ,
y sustituimos en la primera:
Dy2 + x2 −Dy2 = x ⇒ x2 = x .
este sistema no tiene solucion.
Volvamos al caso no degenerado. Como hemos mencionado el hecho de usar los operadores hace que elsistema puede ser tratado de manera similar al de un sistema algebraico, y por lo tanto, podemos utilizarcualquiera de los metodos para la resolucion de sistemas algebraicos.
Consideremos el siguiente sistema de ecuaciones lineales:
P11(D)y1 + P12(D)y2 + P13(D)y3 = Q1 (x)
P21(D)y1 + P22(D)y2 + P23(D)y3 = Q2 (x)
P31(D)y1 + P32(D)y2 + P33(D)y3 = Q3 (x) . (8.9)
El determinante que podemos asociar a este sistema es:
∆ = P11(D)P22(D)P33(D) + P21(D)P32(D)P13(D) + P12(D)P23(D)P13(D)
− P31(D)P22(D)P13(D)− P32(D)P23(D)P11(D)− P21(D)P12(D)P33(D)
La manera usual de resolver este sistema es eliminar algunas de las variables, digamos y3, de manera quenos queda un sistema reducido a dos ecuaciones, digamos:
P11(D)y1 + P12(D)y2 = Q1 (x)
P21(D)y1 + P22(D)y2 = Q2 (x) , (8.10)
Si de este sistema eliminamos y2, entonces lo que queda es una solo ecuacion
P11(D)y1 = Q1 (x) , (8.11)
la cual podemos resolver para y1. Al sustituir este valor en cualquiera de las ecuaciones (8.10) se obtiene y2.Finalmente, la sustitucion de y1 y y2 en cualquiera de las ecuaciones de (8.9) permite obtener y3. El numerode constantes quedara determinado por el oden de ∆.
313

Borra
dor Pre
limin
ar
8.2. SISTEMAS DE ECUACIONES DIFERENCIALES Y EL USO DE OPERADORES
Otra manera de proceder es manipular el sistema (8.9) de manera tal que se obtenga un sistema equiva-lente triangular, es decir, de la forma:
P11(D)y1 = Q1 (x)
P21(D)y1 + P22(D)y2 = Q2 (x)
P31(D)y1 + P32(D)y2 + P33(D)y3 = Q3 (x) . (8.12)
Aquı, las soluciones se van obteniendo desde la primera ecuacion hasta la ultima. Es bueno resaltarel hecho de que las soluciones obtenidas utilizando un sistema equivalente triangular contienen el numerocorrecto de constantes requerido por el sistema. Entonces, para obtener un sistema equivalente triangularprocedemos de la siguiente manera: decidimos dejar una de las ecuaciones sin intervenir y manipulamos lasotras dos, repetimos este procedimiento las veces que sean necesarias hasta obtener el sistema deseado.
Por ejemplo, resolvamos el sistema
x− 2x+ y − z = t (D− 2)y1 + y2 − y3 = x
−x+ 2y + y + 2z = 1 ⇒ −y1 + (2D + 1)y2 + 2y3 = 1
2x+ 6y + z = 0 2y1 + 6y2 + Dy3 = 0 .
Retenemos la primer ecuacion del sistema.
Creamos un nuevo sistema multiplicando la primera ecuacion por 2 y sumandola con la segunda, parade esta manera eliminar y3. Con el mismo fin, multiplicamos la primera por D y la sumamos con latercera. Con esto obtenemos:
(D− 2)y1 + y2 − y3 = x
(D− 5)y1 + (2D + 3)y2 = 2x+ 1
(D2 − 2D + 2)y1 + (D + 6)y2 = 1
Podemos retener la primera y tercera ecuacion y cambiamos la segunda. Entonces multiplicamos latercera por −2 y la sumamos con la segunda:
(D− 2)y1 + y2 − y3 = x
(−2D2 + 6D− 9)y1 − 9y2 = 2x− 1
(D2 − 2D + 2)y1 + (D + 6)y2 = 1
Retenemos la primera y segunda ecuacion y cambiamos la tercera. Lo podemos hacer multiplicando lasegunda por (D + 6)/9 y luego se suma con la tercera:
(D− 2)y1 + y2 − y3 = x
(−2D2 + 6D− 9)y1 − 9y2 = 2x− 1
(−D3 + 3D2 + 9D− 36)y1 = 12x+ 5
Por lo tanto, ya se puede integrar la ultima ecuacion:
y1(x) =C1
3e3 x − 2C2
3e−
32x +
2
3x2 +
37
9x+ C3 .
314

Borra
dor Pre
limin
ar
8.2. SISTEMAS DE ECUACIONES DIFERENCIALES Y EL USO DE OPERADORES
Al sustituir y1(x) en la segunda ecuacion resulta que simplemente queda despejar y2(x)
(−2D2 + 6D− 9)
[C1
3e3 x − 2C2
3e−
32x +
2
3x2 +
37
9x+ C3
]− 9y2 = 2x− 1
−3C1e3 x + 15C2e
− 32x − 6x2 − 29x+ 22− 9C3 − 9y2 = 2x− 1 ,
es decir:
y2(x) = −C1
3e3x +
5C2
3e−
32x − 2
3x2 − 31
9x+
23
9− C3 .
Queda por ultimo sustituir y1(x) y y2(x) en la primera ecuacion y despejar y3(x):
(D− 2)
[C1
3e3 x − 2C2
3e−
32x +
2
3x2 +
37
9x+ C3
]+[
−C1
3e3x +
5C2
3e−
32x − 2
3x2 − 31
9x+
23
9− C3
]− y3 = x
4C2e− 3
2x − 2x2 − 31
3x+
20
3− 3C3 − y3 = x ,
por lo tanto:
y3(x) = 4C2e− 3
2x − 2x2 − 34
3x+
20
3− 3C3 .
No es necesario investigar sobre el numero de constantes, en todo caso, y solo por curiosidad se puedever que el determinante del sistema, al igual que para el sistema triangular, es de orden 3:
∆ =
D− 2 1 −1
−1 2 D + 1 2
2 6 D
= 2 D3 − 3 D2 − 9D + 36 .
8.2.1. Ejemplos
8.2.2. Practicando con Maxima
8.2.3. Ejercicios
1. Resuelva el sistema
(D + 3)y1 + (D + 1)y2 = ex
(D + 1)y1 + (D− 1)y2 = x .
En este caso ∆ es de orden cero y no deben aparecer constantes arbitrarias.
2. Demuestre que el siguiente sistema es degenerado y tiene infinitas soluciones
Dy1 −Dy2 = x
4Dy1 − 4Dy2 = 4x .
315

Borra
dor Pre
limin
ar
8.3. SISTEMAS Y LA TRANSFORMADA DE LAPLACE
8.3. Sistemas y la transformada de Laplace
A diferencia del metodo anterior, el metodo de transformadas de Laplace solo se puede aplicar si ademasdel sistema se suministran el conjunto completo de condiciones iniciales. Esto significa que la solucion par-ticular obtenida ya satisface las condiciones iniciales y no necesitamos evaluar las constantes arbitrarias quepuedan resultar.
Como en capıtulos anteriores resolvimos algunas ecuaciones diferenciales utilizando transformadas deLaplace, podemos pasar directamente a un ejemplo para ver como se aplica el metodo cuando se tienensistemas de ecuaciones diferenciales ( ¡No necesariamente de primer orden!).
Veamos el ejemplo de resolver el sistema
x− 4x+ y = 0
−4x+ y + 2y = 0 con: x(0) = 0 , x(0) = 1 , y(0) = −1 , y(0) = 2 .
En este caso el sistema consiste de dos ecuaciones con dos incognitas, pero debe quedar claro que el metodose puede extender para sistemas con un numero mayor de ecuaciones.
Como vimos anteriormente, utilizando la notacion de las transformadas de Laplace el sistema se puedeescribir de la siguiente manera.
L [y′′1 ]− 4L [y1] + L [y′2] = 0
−4L [y′1] + L [y′′2 ] + 2L [y2] = 0
Donde tambien, hemos rebautizado las funciones de la siguiente manera: y1(x) = x(t) y y2(x) = y(t).Revisando las notas de las clases correspondientes a las transformadas de Laplace, podemos ver que el
sistema anterior queda de la siguiente forma:
s2L [y1]− y′1(0)− sy1(0)− 4L [y1] + sL [y2]− y2(0) = 0
−4sL [y1] + 4y1(0) + s2L [y2]− y′2(0)− sy2(0) + 2L [y2] = 0
al sustituir los respectivos valores para las condiciones iniciales y factorizando, resulta:
(s2 − 4)L [y1] + sL [y2] = 0
−4sL [y1] + (s2 + 2)L [y2]− 2 + s = 0
Este ultimo sistema puede ser tratado como un sistema algebraico para L [y1] y L [y2]. Si multiplicamosla primera por 4s, la segunda por s2 − 4 y luego las sumamos eliminamos L [y1], resulta:
(s4 + 2s2 − 8)L [y2] = −s3 + 2s2 + 4s− 8 ,
despejando L [y2]:
L [y2] =−s3 + 2s2 + 4s− 8
s4 + 2s2 − 8=−s3 + 2s2 + 4s− 8
(s2 + 4)(s2 − 2)=
1
6
[1 +√
2
s+√
2+
1−√
2
s−√
2− 8(s− 2)
s2 + 4
].
Ahora debemos buscar en nuestra tablita de transformadas de Laplace, para hallar las transformadas
316

Borra
dor Pre
limin
ar
8.3. SISTEMAS Y LA TRANSFORMADA DE LAPLACE
inversas:
L[(1 +
√2)e−
√2x]
=1 +√
2
s+√
2
L[(1−
√2)e√
2x]
=1−√
2
s−√
2
L [−8 cos(2x)] = −8
[s
s2 + 22
]L [8 sen(2x)] = 8
[2
s2 + 22
]por lo tanto:
y2(x) =1
6
[(1 +
√2)e−
√2x + (1−
√2)e√
2x − 8 cos(2x) + 8 sen(2x)].
Para calcular y1(x), podemos sustituir L [y2] en cualquiera de las ecuaciones (8.13) - (8.13) y resolverpara L [y1]:
(s2 − 4)L [y1] + sL [y2] = 0 ⇒ (s2 − 4)L [y1] + s
[−s3 + 2s2 + 4s− 8
(s2 + 4)(s2 − 2)
]= 0 ,
esto es:
L [y1] =s(s− 2)
(s2 + 4)(s2 − 2)= − 1
12
[2−√
2
s−√
2+
2 +√
2
s+√
2− 4
(s+ 2
s2 + 4
)].
Nuevamente buscando en las tablas de transformadas de Laplace, termino por termino, se llega finalmenteal siguiente resulado:
y1(x) = − 1
12
[(2−
√2)e√
2x + (2 +√
2)e−√
2x − 4 cos(2x)− 4 sen(2x)].
Ejercicios
1. Resuelva cada uno de los siguientes sistemas de ecuaciones diferenciales
a) x = −x2 , y = −y
b) x = 3e−t , y = x+ y
c) x = 2t , y = 3x+ 2t , z = x+ 4y + t
d) x = 3x+ 2e3t , x+ y − 3y = sen(2t)
e) x+ 4x = 3 sen(t) , x− y + y = 2 cos(t)
f) x− 4x− 2y + y = t , 2x+ x+ y + y = 0
2. Verifique que los siguientes sistemas son degenerados. Encuentre las soluciones si existen
317
Borra
dor Pre
limin
ar
8.3. SISTEMAS Y LA TRANSFORMADA DE LAPLACE
a) Dx+ 2Dy = et , Dx+ 2Dy = t
b) Dx−Dy = et , 3Dx− 3Dy = 3et
c) (D2 − 1)x+ (D2 − 1)y = 0 , (D2 + 4)x+ (D2 + 4)y = 0
d) (D− 2)x+ (D− 2)y = t , (D + 3)x+ (D + 3)y = t
3. Resuelva los siguientes sistemas de ecuaciones diferenciales
a) (D− 1)x = 0 , −x+ (D− 3)y = 0 , −x+ y + (D− 2)z = 0
b) (D− 1)x = 0 , 3x+ 2(D + 1)y = 0 , 2y + (2D− 3)z = 0
c) (D− 2)x = 0 , −3x+ (D + 2)y = 0 , −2y + (D− 3)z = 0
d) Dx− y + z = 0 , −x+ (D− 1)y = 0 , −x+ (D− 1)z = 0
4. Resuelva los siguientes sistemas utilizando transformadas de Laplace
a) x− y = t , x− y = 1 , x(0) = 2 , y(0) = 2
b) 3x+ 3x+ 2y = et , 4x− 3y + 3y = 3t , x(0) = 1 , y(0) = −1
c) x+ y − 4y = 1 , x+ y − 3y = t2 , x(0) = 2 , y(0) = −2
d) x− y = 1− t , x+ 2y = 4et + x x(0) = 0 , y(0) = 0 , x′(0) = 1
8.3.1. Ejemplos
8.3.2. Practicando con Maxima
8.3.3. Ejercicios
318

Borra
dor Pre
limin
arCapıtulo 9Metodos de soluciones por series
319
Borra
dor Pre
limin
ar
9.1. OTRA VEZ LAS SERIES
9.1. Otra vez las series
Recordemos que una serie de la forma
a0 + a1(x− x0) + a2(x− x0)2 + a3(x− x0)3 + · · · (9.1)
donde a0, a1, a2, . . . , x0 son constantes y x una variable se denomina una serie de potencias. Tambien vimosque una serie de potencias puede
converger solo para un valor de x = x0
converger absolutamente para valores de x en una vecindad de x0, es decir: |x− x0| < ρ.
converger absolutamente para todos los valores de x.
Si la serie de potencias (9.1) converge en un intervalo I : |x− x0| < ρ, donde ρ es una constante positiva,entonces (9.1) define una funcion f(x) contınua para todo x de I. Lo inverso de esta ultima afirmacion esuna cuestion que tendrıamos que preguntarnos, es decir: dada una funcion, definida en un intervalo I ¿existeuna serie de potencias que la defina? En clases anteriores, vimos que si f(x) es definida por una serie depotencias, entonces:
f(x) = f(x0) + f ′(x0)(x− x0) +f ′′(x0)
2!(x− x0)2 +
f ′′′(x0)
3!(x− x0)3 + · · ·
· · · +f (n)(x0)
n!(x− x0)n + · · · (9.2)
con |x − x0| < ρ. La serie (9.2) se conoce como la expansion de f(x) en serie de Taylor. Si x0 = 0, la seriese denomina de Maclaurin.
Estudiemos ahora la relacion que existe entre series y las ecuaciones diferenciales.
Un Ejemplo conocido: Consideremos la bien conocida ecuacion diferencial
y′′ + y = 0 ,
se propone encontrar una solucion entorno a x = 0, por lo tanto, si consideramos la siguiente funcion deprueba
y(x) =
∞∑n=0
anxn ,
entonces, al derivar:
y′(x) =
∞∑n=1
nanxn−1 , y′′(x) =
∞∑n=2
n (n− 1) anxn−2 ,
y sustituir en la ecuacion diferencial
y′′ + y =
∞∑n=2
n (n− 1) anxn−2 +
∞∑n=0
anxn =
∞∑k=0
(k + 2) (k + 1) ak+2xk +
∞∑n=0
anxn = 0
=
∞∑k=0
[(k + 2) (k + 1) ak+2 + ak]xk = 0 .
320

Borra
dor Pre
limin
ar
9.1. OTRA VEZ LAS SERIES
Por lo tanto
(k + 2) (k + 1) ak+2 + ak = 0 ⇒ ak+2 =−ak
(k + 2) (k + 1)con k = 0, 1, 2, . . .
se puede ver que:
a2 = − a0
2 · 1; a4 = − a2
4 · 3=−1
4 · 3· (−a0)
2=
a0
4 · 3 · 2 · 1=a0
4!; a6 = − a4
6 · 5= − a0
6 · 5 · 4 · 3 · 2 · 1= −a0
6!.
Y en general
a2k =(−1)
k
(2k)!a0 .
Similarmente, para los coeficientes impares se obtiene
a3 = − a1
3 · 2; a5 = − a3
5 · 4=−1
5 · 4· (−a1)
3 · 2=
a1
5 · 4 · 3 · 2 · 1=a1
5!; a7 = − a5
7 · 6= − a1
7 · 6 · 5 · 4 · 3 · 2 · 1= −a1
7!,
de donde
a2k+1 =(−1)
k
(2k + 1)!a1 .
De este modo, la solucion deseada queda como
y(x) =∞∑n=0
anxn = a0 + a1x+
(−a0)
2!x2 +
(−a1)
3!x3 +
a0
4!x4 +
a1
5!x5 +
(−a0)
6!x6 +
(−a1)
7!x7 + · · ·
= a0
[1− x2
2!+x4
4!− x6
6!+ · · ·
]+ a1
[x− x3
3!+x5
5!− x7
7!+ · · ·
]= a0
∞∑k=0
(−1)k
(2k)!x2k + a1
∞∑k=0
(−1)k
(2k + 1)!x2k+1 = a0 cos(x) + a1sen(x) .
Otro ejemplo, menos conocido pero importante: Considere la ecuacion de Hermite1 la cual apareceen la solucion del oscilador armonico cuantico
y′′ − 2xy′ + λy = 0 .
Para resolver esta ecuacion alrededor del punto x0 = 0, proponemos la siguiente expansion en series depotencias como solucion:
y(x) =
∞∑n=0
anxn ⇒
y′(x) =∑∞n=1 nanx
n−1
y′′(x) =∑∞n=2 n(n− 1)anx
n−2
entonces, sustituyendo en la ecuacion de Hermite resulta∞∑n=2
n(n− 1)anxn−2 − 2
∞∑n=1
nanxn + λ
∞∑n=0
anxn = 0
∞∑k=0
(k + 2) (k + 1)ak+2xk − 2
∞∑n=1
nanxn + λ
∞∑n=0
anxn = 0
(2a2 + λa0) +
∞∑n=1
[(n+ 2) (n+ 1)an+2 − 2nan + λan]xn = 0 ,
1Charles Hermite, (1822-1901). Matematico frances, especializado en el estudio de teorıa de funciones, ofrecio importantesaportaciones al algebra, las funciones abelianas y la teorıa de las formas cuadraticas.
321

Borra
dor Pre
limin
ar
9.1. OTRA VEZ LAS SERIES
igualando terminos se puede encontrar una relacion de recurrencia para los coeficientes:
a0 = −2a2
λy an+2 =
2n− λ(n+ 2) (n+ 1)
an , n ≥ 1 .
La solucion tendra entonces la siguiente forma:
y (x) = a0
[1− λ
2!x2 − (4− λ)λ
4!x4 − (8− λ) (4− λ)λ
6!x6 − · · ·
]+ a1
[x+
(2− λ)
3!x3 +
(6− λ) (2− λ)
5!x5 +
(10− λ) (6− λ) (2− λ)
7!x7 + · · ·
]= a0y0(x) + a1y1(x)
Notese que para valores pares de λ una u otra serie se corta y genera polinomios de la forma:
λ Ecuacion de Hermite Polinomio asociado
0 y′′ − 2xy′ = 0 y0(x) = 12 y′′ − 2xy′ + 2y = 0 y1(x) = x4 y′′ − 2xy′ + 4y = 0 y0(x) = 1− 2x2
6 y′′ − 2xy′ + 6y = 0 y1(x) = x− 23x
3
8 y′′ − 2xy′ + 8y = 0 y0(x) = 1− 4x2 + 43x
4
Los polinomios de Hermite tambien pueden ser obtenidos a partir de la formula de Rodrigues:
Hn(x) = (−1)nex2 dn
dxne−x
2
, n = 0, 1, 2, . . . (9.3)
o a traves de una relacion de recurrencia
Hn+1(x)− 2xHn(x) + 2nHn−1(x) = 0 .
Podemos ver la relacion entre los polinomios de Hermite y las soluciones
λ = 0 ⇒ y0(x) = 1 = H0(x)
λ = 2 ⇒ y1(x) = x =1
2H1(x)
λ = 4 ⇒ y0(x) = 1− 2x2 = −1
2H2(x)
λ = 6 ⇒ y1(x) = x− 2
3x3 = − 1
12H3(x)
λ = 8 ⇒ y0(x) = 1− 4x2 +4
3x4 =
1
12H4(x)
Las ecuaciones antes mencionadas eran ecuaciones homogeneas. En el caso que la ecuacion diferencial aresolver por series sea una ecuacion inhomogena, se procedera del mismo modo como se propuso en el caso deque los coeficientes de la ecuacion diferencial fueran constantes. Esto es, se resuelve por series la homogeneay luego se propone una solucion particular, en forma de serie de potencias, la cual se iguala con la expansion,tambien en series de potencias, del termino inhomogeneo.
Como ejemplo, antes de proceder a casos mas generales resolvamos la ecuacion de Airy2, pero inhomogena,los calculos se dejan como ejercicio para el estudiante. A pesar de su simplicidad, esta ecuacion admite solosoluciones en forma de serie.
2George Biddell Airy (1801-1892) Matematico y Astronomo Ingles con contribuciones importantes en la solucion deecuaciones diferenciales y su utilizacion en Astronomıa. Mejoro significativamente las estimaciones teoricas de la orbita deVenus y la Luna. Realizo estudios matematicos de la formacion del arcoiris y la densidad de la tierra.
322

Borra
dor Pre
limin
ar
9.1. OTRA VEZ LAS SERIES
La ecuacion homogenea de Airy es la siguiente:
y′′ − xy = 0
Compruebe, siguiendo el procedimiento arriba expuesto, que para una posible ecuacion inhomogenea de Airy
y′′ − xy = ex
se tiene como solucion la siguiente serie de potencias
y (x) = y(0)
[1 +
1
6x3 +
1
180x6 + · · ·
]+ y′(0)
[x+
1
12x4 +
1
504x7 + · · ·
]+
1
2x2 +
1
6x3 +
1
24x4 + · · ·
Notese que los dos primeros terminos corresponden a la solucion de la ecuacion homogenea y el ultimorepresenta la serie que anula el termino inhomogeneo. Hemos hecho patente la dependencia de las constantesde integracon de las condiciones iniciales.
9.1.1. Metodo de Diferenciaciones Sucesiva
En general, dada la ecuacion diferencial no homogenea
a0(x)y + a1(x)y′ + · · ·+ an−1(x)y(n−1) + an(x)y(n)(x) =
n∑i=0
ai(x) y(i) = F(x) . (9.4)
Si los coeficientes a0(x) · · · an(x) son funciones analıticas en x = x0 (se pueden expresar como una seriede Taylor de (x − x0) que converge al valor de la funcion con un radio de convergencia de |x− x0| < ρ),entonces, la ecuacion diferencial (9.4) tendra como solucion unica, y = y(x), de la ecuacion homogena, unaserie de potencias que satisface las n condiciones iniciales:
y(x0) = C1 ; y′(x0) = C2 ; y′′(x0) = C3 ; . . . y(n−1)(x0) = Cn .
Adicionalmente, se expandira en Taylor la funcion inhomogenea, esto es:
F(x) =
n∑i=0
F (i)(x0)(x− x0)
i
i!,
y se propondra una solucion particular de la inhomogenea, tambien en terminos de una serie
yih(x) =
∞∑j=0
ajxj .
Otra forma de hacerlo es proceder directamente y conservar el termino inhomogeneo y a partir de laecuacion completa encontrar los coeficientes de la expansion por Taylor alrededor del punto en el cual sedisponga de las condiciones iniciales. La solucion en series de Taylor sera
yh(x) = y(0) + y′(0)x+ y′′(0)x2
2!+ y′′′(0)
x3
3!+ · · ·
Por ejemplo, resolver por series la siguiente ecuacion diferencial
y′′ − (x+ 1) y′ + x2y = x ; con y(0) = 1 , y y′(0) = 1.
323

Borra
dor Pre
limin
ar
9.1. OTRA VEZ LAS SERIES
Los coeficientes de la expansion se obtienen de los valores de las derivadas en x0 = 0, los cuales salen delas condiciones iniciales y de la ecuacion diferencial, esto es
y(0) = 1; y′(0) = 1; y′′(0) = (0) + (0 + 1) y′(0)− 02y(0) = 1
y de las derivadas de la ecuacion diferencial hasta el orden que consideremos conveniente
y′′′(x) = y′(x) + (x+ 1) y′′(x)− 2x y(x)− x2y′(x) + 1
y′′′(0) = y′(0) + (0 + 1) y′′(0)− 2(0) y(0)− 02y′(0) + 1
y′′′(0) = 1 + 1 + 1 = 3
finalmente, la solucion es entonces:
y(x) = 1 + x+x2
2+x3
2+ · · · .
Esta solucion contiene las dos soluciones (la homogenea y la particular de la inhomogenea) sumadas.
9.1.2. Metodos de los Coeficientes Indeterminados
En general, para encontrar la solucion a la ecuacion antes mencionada:
n∑i=0
ai(x) y(i)(x) = F(x) ,
se expanden por series de potencias cada uno de los coeficientes a0(x), . . . , an(x), la funcion F(x) y se proponela siguiente solucion de prueba
y(x) =
∞∑n=0
cn (x− x0)n
luego de bastante transpiracion se despejan los coeficientes: c0 · · · cn · · · .Consideremos a misma ecuacion del ejemplo anterior.
y′′ − (x+ 1) y′ + x2y = x ; con y(0) = 1 y y′(0) = 1.
Como x0 = 0, proponemos la siguiente expansion en series de potencias como solucion:
y(x) =
∞∑n=0
cnxn ⇒
y′(x) =∑∞n=1 ncnx
n−1
y′′(x) =∑∞n=2 n(n− 1)cnx
n−2
y al sustituir en la ecuacion diferencial resulta
∞∑n=2
n(n− 1)cnxn−2 − (x+ 1)
∞∑n=1
ncnxn−1 + x2
∞∑n=0
cnxn = x
∞∑n=2
n(n− 1)cnxn−2 −
∞∑n=1
ncnxn −
∞∑n=1
ncnxn−1 +
∞∑n=0
cnxn+2 = x
si hacemos n− 2 = l en el primer termino, n− 1 = k en el tercero y n+ 2 = m en el cuarto, tenemos
∞∑l=0
(l + 2) (l + 1) cl+2xl −
∞∑n=0
ncnxn −
∞∑k=0
(k + 1) ck+1xk +
∞∑m=2
cm−2xm = x
324

Borra
dor Pre
limin
ar
9.1. OTRA VEZ LAS SERIES
notese que en el segundo termino se puede comenzar la serie en cero y no pasa nada. Al renombrar nuevamentelos ındices y factorizar se tiene:
∞∑n=0
[(n+ 2) (n+ 1) cn+2 − ncn − (n+ 1) cn+1]xn +
∞∑n=2
cn−2xn = x
por lo tanto
n = 0 ⇒ 2c2 − c1 = 0
n = 1 ⇒ 3 · 2 c3 − c1 − 2 c2 = 1
y la relacion de recurrencia para n ≥ 2 es la siguiente
(n+ 2) (n+ 1) cn+2 − ncn − (n+ 1) cn+1 − cn−2 = 0
con la cual se obtienen todos los demas coeficientes.
9.1.3. Ejemplos
1. Si la ecuacion a resolver es ahoray′′ + sen(x)y′ + exy = 0
se expanden los coeficientes
y′′ +
[x− 1
6x3 +
1
120x5 + · · ·
]y′ +
[1 + x+
1
2x2 +
1
6x3 +
1
24x4 +
1
120x5 + · · ·
]y = 0
se propone una solucion en terminos de series de potencias
y(x) =
∞∑n=0
cnxn ⇒
y′(x) =∑∞n=1 ncnx
n−1
y′′(x) =∑∞n=2 n(n− 1)cnx
n−2
por lo cual, al sustituir en la ecuacion diferencial
∞∑n=2
n(n− 1)cnxn−2 +
[x− 1
6x3 + · · ·
] ∞∑n=1
ncnxn−1 +
[1 + x+
1
2x2 + · · ·
] ∞∑n=0
cnxn = 0
acomodando terminos se puede ver que
(2c2 + c0)+(6c3 + 2c1 + c0)x+(12c4 + 3c2 + c1 + c0/2)x2+(20c5 + 4c3 + c2 + c1/3 + c0/6)x3+· · · = 0
Por lo tanto, al igualar coeficientes resulta:
2c2 + c0 = 0 ⇒ c2 = −c0/26c3 + 2c1 + c0 = 0 ⇒ c3 = −c1/3− c0/6
12c4 + 3c2 + c1 + c0 = 0 ⇒ c4 = c0/12− c1/12
20c5 + 4c3 + c2 + c1 + c0 = 0 ⇒ c5 = c0/20 + c1/20
......
...
Por lo tanto, la solucion se puede escribir de la siguiente manera
y(x) = c0
[1− 1
2x2 − 1
6x3 +
1
12x4 +
1
20x5 + · · ·
]+ c1
[x− 1
3x3 − 1
12x4 +
1
20x5 + · · ·
].
325

Borra
dor Pre
limin
ar
9.2. LOS PUNTOS Y LAS ESTRATEGIAS
9.1.4. Practicando con Maxima
9.1.5. Ejercicios
1. Dado |x| < 1 y la ecuacion diferencial
y′′ +x
1− x2y′ − 1
1− x2y = e2x ; con y(0) = 1 , y y′(0) = 1 ,
compruebe que tiene como solucion general por series
y(x) = y(0)
[1 +
1
2x2 +
1
24x4 +
1
80x6 + · · ·
]+ y′(0)x+
1
2x2 +
1
3x3 +
1
8x4 + · · ·
y al incorporar los valores de las condiciones iniciales se obtiene
y (x) = 1 + x+ x2 +1
3x3 +
1
6x4 +
1
30x5 +
1
180x6 − 4
315x7 − 79
10 080x8 + · · ·
2. Utilice el metodo de los coeficientes indeterminados para resolver
y′′ +x
1− x2y′ − 1
1− x2y = e2x; con y(0) = 1; y y′(0) = 1.
3. Encuentre los terminos hasta orden k de la solucion particular de cada uno de las siguientes ecuacionesdiferenciales. Utilice ambos metodos: diferenciaciones sucesivas y coeficientes indeterminados.
a) y′ − xy + x3 = 0 , y(0) = 2 , k = 5
b) x2y′′ = x+ 1 , y(1) = 0 , y′(0) = 0 , k = 4
c) xy′′ + x2y′ − 2y = 0 , y(1) = 0 , y′(0) = −1 , k = 4
d) y′′ + 3xy′ + exy = 2x , y(1) = 0 , y′(1) = 1/2 , k = 5
e) (1− x)y′′′ − 2xy′ + 3y = 0 , y(0) = 1 , y′(0) = −1 , y′′(0) = 2 , k = 6
9.2. Los Puntos y las Estrategias
Dada una ecuacion diferencial del tipo
P (x) y′′ +Q (x) y′ +R (x) y = 0 ⇒ y′′ +Q (x)
P (x)y′ +
R (x)
P (x)y = 0
entonces debemos aclarar algunos aspectos:
Puntos ordinarios Un punto ordinario x = x0 sera aquel alrededor del cual p(x) = Q(x)P (x) y q (x) = R(x)
P (x)
sean analıticas en ese punto, o lo que es igual a
lımx→x0
p(x) ≡ lımx→x0
Q (x)
P (x)= L1 , con L1 finito
lımx→x0
q (x) ≡ lımx→x0
R (x)
P (x)= L2 , con L2 finito
O tambien, lo que es lo mismo, que p(x) y q(x) tengan una expansion en Taylor alrededor de ese puntox = x0, es decir, que sean analıticas.
326

Borra
dor Pre
limin
ar
9.2. LOS PUNTOS Y LAS ESTRATEGIAS
Puntos singulares regulares Un punto x = x0 se llamara un punto singular regular si
lımx→x0
(x− x0) p(x) ≡ lımx→x0
(x− x0)Q (x)
P (x)= L3 , con L3 finito
lımx→x0
(x− x0)2q (x) ≡ lım
x→x0
(x− x0)2 R (x)
P (x)= L4 , con L4 finito
O tambien, lo que es lo mismo, que: p(x) (x− x0) y q (x) (x− x0)2
tengan una expansion en Tayloralrededor de ese punto.
Puntos singulares irregulares Ninguna de las anteriores.
Por ejemplo, Dada la siguiente ecuacion:
(x− 1)y′′ +1
xy′ − 2y = 0 (a)
Si dividimos por (x− 1), resulta:
y′′ +1
x(x− 1)y′ − 2y
x− 1= 0 (b)
entonces:
p(x) =1
x(x− 1)y q(x) = − 2
x− 1
los puntos x = 0 y x = 1 son puntos singulares de (b). Investiguemos si son puntos singulares regulares:
Para el punto x = 0:
lımx→0
(x− 0) p(x) = lımx→0
[x
x(x− 1)
]= −1
lımx→0
(x− 0)2q (x) = lım
x→0
[− 2x2
x− 1
]= 0
por lo tanto, p(x) y q(x) tienen una espansion en Taylor alrededor de x = 0 y el punto representa unasingularidad regular.
Para el punto x = 1:
lımx→1
(x− 1) p(x) = lımx→1
[x− 1
x(x− 1)
]= 1
lımx→1
(x− 1)2q (x) = lım
x→1
[−2(x− 1)2
x− 1
]= 0
Por la misma razon del caso anterior, el punto x = 1 tambien resulta ser una singularidad regular.
9.2.1. Ecuaciones e intervalos en puntos regulares
La ecuacion de Legendre3
(1− x2) y′′ − 2x y′ + λ(λ+ 1) y = 0
3Adrien Marie Legendre (1752-1833). Matematico frances, encuadrado en la escuela de Parıs, que surgio luego de larevolucion de 1789. Realizo una teorıa general de las funciones elıpticas y divulgo numerosos trabajos de investigadores jovenesen el campo del analisis matematico.
327

Borra
dor Pre
limin
ar
9.2. LOS PUNTOS Y LAS ESTRATEGIAS
tiene puntos regulares en x 6= ±1 y puntos singulares regulares en x = ±1. Pero es analıtica en x ∈ (−1, 1),por lo tanto, todos los x son ordinarios si x ∈ (−1, 1). En ese intervalo se propone una solucion de la forma
y(x) =
∞∑n=0
anxn
al sustituir esta solucion en la ecuacion diferencial, resulta
(1− x2)
∞∑n=2
n(n− 1)anxn−2 − 2x
∞∑n=1
n anxn−1 + λ(λ+ 1)
∞∑n=0
anxn = 0
multiplicando y acomodando
∞∑k=0
(k + 2)(k + 1)ak+2xk −
∞∑n=2
n(n− 1)anxn − 2
∞∑n=1
n anxn + λ(λ+ 1)
∞∑n=0
anxn = 0
expandiendo
2a2 + λ(λ+ 1)a0 [(λ+ 2)(λ− 1)a1 + (3 · 2)a3]x+
∞∑n=2
[(n+ 2)(n+ 1)an+2 + (λ+ n+ 1)(λ− n)an]xn = 0
donde hemos utilizado−n(n− 1)− 2n+ λ(λ+ 1) = (λ+ n+ 1)(λ− n)
por lo tanto
a2 = − (λ+ 1)λ
2a0
a4 =(λ+ 3)(λ+ 1)λ(λ− 2)
4!a0
a2n = (−1)n(λ+ 2n− 1)(λ+ 2n− 3) · · · (λ+ 1)λ(λ− 2) · · · (λ− 2n+ 2)
(2n)!a0
y las potencias impares seran
a3 = − (λ+ 2)(λ− 1)
3!a1
a5 =(λ+ 4)(λ+ 2)(λ− 1)(λ− 3)
5!a1
a2n+1 = (−1)n(λ+ 2n)(λ+ 2n− 2) · · · (λ+ 2)(λ− 1) · · · (λ− 2n+ 1)
(2n+ 1)!a1
La solucion general se puede escribir de la siguiente manera
y(x) = a0 y0(x) + a1y1(x)
con
y0(x) = 1− (λ+ 1)λ
2x2 +
(λ+ 3)(λ+ 1)λ(λ− 2)
4!x4 + · · ·
y1(x) = x− (λ+ 2)(λ− 1)
3!x3 +
(λ+ 4)(λ+ 2)(λ− 1)(λ− 3)
5!x5 + · · ·
si λ = 2n una de las series se corta y la solucion es un polinomio de potencias pares, si λ = 2n+ 1 la otra secorta en uno de potencias impares.
328

Borra
dor Pre
limin
ar
9.2. LOS PUNTOS Y LAS ESTRATEGIAS
λ Ecuacion de Legendre Polinomio Asociado
0 (1− x2) y′′ − 2x y′ = 0 y0(x) = 11 (1− x2) y′′ − 2x y′ + 2 y = 0 y1(x) = x2 (1− x2) y′′ − 2x y′ + 6 y = 0 y0(x) = 1− 3x2
3 (1− x2) y′′ − 2x y′ + 12 y = 0 y1(x) = x− 53x
3
4 (1− x2) y′′ − 2x y′ + 20 y = 0 y0(x) = 1− 10x2 + 353 x
4
Los polinomios de Legendre son funciones que surgen en problemas de electrostatica como solucion de laecuacion de Legendre y son efectivamente polinomios para λ entero. Los Polinomios de Legendre tambienpueden ser generados a partir de la Formula de Rodrıgues
Pn(x) =1
n!2ndn
dxn(x2 − 1)n, n = 0, 1, 2, .....
con P0(x) = 1. Tambien se dispone de una relacion de recurrencia
(n+ 1)Pn+1(x) = (2n+ 1)xPn(x)− nPn−1(x) .
Podemos ver la relacion entre los polinomios de Legendre y las soluciones
λ = 0 ⇒ y0(x) = 1 = P0(x)
λ = 1 ⇒ y1(x) = x = P1(x)
λ = 2 ⇒ y0(x) = 1− 3x2 = −2P2(x)
λ = 3 ⇒ y1(x) = x− 5
3x3 = −2
3P3(x)
λ = 4 ⇒ y0(x) = 1− 10x2 +35
3x4 =
8
3P4(x) .
9.2.2. Ejemplos
9.2.3. Practicando con Maxima
9.2.4. Ejercicios
1. Muestre que los puntos x = 0 y x = 1 son puntos singulares irregulares de la siguiente ecuacion:
(x− 1)2y′′ +1
x2y′ + 2y = 0 .
2. Obtenga los terminos hasta orden k en potencias de (x− x0) de la solucion general de cada una de lassiguientes ecuaciones diferenciales
a) y′′ − xy′ + 2y = 0 , x0 = 0 , k = 7
b) 2(x2 + 8)y′′ + 2xy′ + (x+ 2)y = 0 , x0 = 0 , k = 4
c) xy′′ + x2y′ − 2y = 0 , x0 = 1 , k = 4
d) y′′ − xy′ − y = sen(x) , x0 = 0 , k = 5
329
Borra
dor Pre
limin
ar
9.3. EL METODO DE FROBENIUS
9.3. El Metodo de Frobenius
Para la solucion de ecuaciones diferenciales lineales ordinarias alrededor de puntos singulares regularesse utiliza el metodo de Frobenius4. Dada una ecuacion diferencial de segundo orden:
y′′ + F1 (x) y′ + F2 (x) y = 0 ⇔ y′′ +f1 (x)
(x− x0)y′ +
f2 (x)
(x− x0)2 y = 0 , (9.5)
donde F1 (x) y F2 (x) tienen singularidades regulares en x = x0 y por lo tanto f1 (x) y f2 (x) son analıticasalrededor de ese punto entonces, la propuesta de solucion sera una serie de Frobenius
y(x) = (x− x0)m∞∑n=0
an (x− x0)n, (9.6)
donde n es entero positivo, pero m puede ser entero positivo (entonces la serie de Frobenius es una serie deTaylor) o entero negativo (entonces la serie de Frobenius es una serie de Laurent), o un racional. Por lo cualuna serie de Frobenius incluye a las serie de Taylor y Laurent. Para hacer las cosas mas simples supongamos,sin perder generalidad, x0 = 0. Ademas, como f1 (x) y f2 (x) son analıticas entonces
f1 (x) =
∞∑n=0
bnxn y f2 (x) =
∞∑n=0
cnxn (9.7)
por lo tanto, la ecuacion (9.5) queda
y′′ +f1 (x)
xy′ +
f2 (x)
x2y = 0 ⇒ x2y′′ + x f1 (x) y′ + f2 (x) y = 0 (9.8)
o tambien:
x2y′′ + x
∞∑n=0
bnxn y′ +
∞∑n=0
cnxn y = 0 .
Propondremos entonces la serie de Frobenius como solucion de prueba:
y(x) = xm∞∑n=0
anxn ,
por lo tanto:
y′(x) = mxm−1∞∑n=0
anxn + xm
∞∑n=1
nanxn−1
y′′(x) = m (m− 1)xm−2∞∑n=0
anxn + 2mxm−1
∞∑n=1
nanxn−1 + xm
∞∑n=2
n (n− 1) anxn−2 ,
sustituyendo en la ecuacion diferencial
x2
[m (m− 1)xm−2
∞∑n=0
anxn + 2mxm−1
∞∑n=1
nanxn−1 + xm
∞∑n=2
n (n− 1) anxn−2
]+
x
∞∑n=0
bnxn
[mxm−1
∞∑n=0
anxn + xm
∞∑n=1
nanxn−1
]+
∞∑n=0
cnxn xm
∞∑n=0
anxn = 0 ,
4Ferdinand Georg Frobenius (1849-1917) Matematico Aleman famoso por sus contribuciones en Teorıa de Grupos ymetodos para resolver ecuaciones diferenciales.
330

Borra
dor Pre
limin
ar
9.3. EL METODO DE FROBENIUS
acomodando algunos terminos:
m (m− 1)xm∞∑n=0
anxn + 2mxm
∞∑n=1
nanxn + xm
∞∑n=2
n (n− 1) anxn +
∞∑n=0
bnxn
[mxm
∞∑n=0
anxn + xm
∞∑n=1
nanxn
]+
∞∑n=0
cnxn xm
∞∑n=0
anxn = 0 ,
podemos ahora sacar como factor comun a xm,
xm
[m (m− 1)
∞∑n=0
anxn + 2m
∞∑n=1
nanxn +
∞∑n=2
n (n− 1) anxn +
∞∑n=0
bnxn
[m
∞∑n=0
anxn +
∞∑n=1
nanxn
]+
∞∑n=0
cnxn∞∑n=0
anxn
]= 0 .
Expandiendo estas series y factorizando para los terminos de igual potencia:
{a0[m (m− 1) + b0m+ c0]}xm +
{a1[m (m+ 1) + b0 (m+ 1) + c0] + a0 [b1m+ c1]}xm+1 +
{a2[(m+ 2) (m+ 1) + b0 (m+ 2) + c0] + a1 [b1 (m+ 1) + c1] + a0 [b2m+ c2]}xm+2 +
{a3[(m+ 3) (m+ 2) + b0 (m+ 3) + c0] + a2 [b1 (m+ 2) + c1] + a1 [b2 (m+ 1) + c2] + a0 [b3m+ c3]}xm+3 +
......
+ · · ·+ {an[(m+ n) (m+ n− 1) + b0 (m+ n) + c0] + an−1 [b1 (m+ n− 1) + c1] +
an−2 [b2 (m+ n− 2) + c2] +
an−3 [b3 (m+ n− 3) + c3] +
+ · · ·+ a1 [bn−1 (m+ 1) + cn−1] +
a0 [bnm+ cn]}xm+n = 0
(9.9)
Consideremos el coeficiente de a0 que aparece en la primera lınea, lo denotaremos por µ(m)
µ(m) = m (m− 1) + b0m+ c0 ,
podemos notar que para el coeficiente de a1 en la segunda lınea tenemos
µ(m+ 1) = m (m+ 1) + b0 (m+ 1) + c0 ,
de manera que:
para: a2 ⇒ µ(m+ 2) = (m+ 2) (m+ 1) + b0 (m+ 2) + c0
para: a3 ⇒ µ(m+ 3) = (m+ 3) (m+ 2) + b0 (m+ 3) + c0...
......
...
para: an ⇒ µ(m+ n) = (m+ n) (m+ n− 1) + b0 (m+ n) + c0 .
331

Borra
dor Pre
limin
ar
9.3. EL METODO DE FROBENIUS
Esto nos permite reacomodar aun mas nuestros calculos
a0µ(m)xm +
∞∑n=1
[an µ(m+ n) +
n−1∑k=0
ak [(m+ k) bn−k + cn−k]
]xm+n = 0 . (9.10)
Como es de esperarse, este polinomio se anula si los coeficientes de xm, . . . , xm+i se anulan. La primerade las ecuaciones que surge es lo que llamaremos la ecuacion indicadora o ındice
a0 6= 0 ⇒ µ(m) = m (m− 1) + b0m+ c0 = 0 , (9.11)
que no es otra cosa que un polinomio de segundo grado en m.Al anular el coeficiente de xm+n
anµ(m+ n) +
n−1∑k=0
ak [(m+ k) bn−k + cn−k] = 0 , (9.12)
obtendremos la relacion de recurrencia para la serie de Frobenius, correspondientes a cada raız de la ecuacionindicadora (9.11), es decir, los coeficientes an dependeran de m y de los coeficientes que le preceden: {an−1}.
Dado que la ecuacion indicadora es un polinomio de segundo grado para m, entonces de allı se deri-van dos raıces: m1 y m2 (consideraremos siempre que m1 ≥ m2). Dependiendo de como sean estas raıcesdistinguiremos tres casos:
1. m1 6= m2 ∧ m1 −m2 6= N , con N entero.
2. m1 = m2 = m.
3. m1 6= m2 ∧ m1 −m2 = N , con N entero positivo.
Como veremos a continuacion, las raıces determinan fuertemente el comportamiento de las soluciones enla vecindad de la singularidad. Tambien podemos ver que los dos terminos que aparecen en (9.12) no tienenpor que ser necesariamente diferentes a cero simultaneamente.
Estudiemos estos casos con un poco mas de detalle:
Caso 1: m1 6= m2 ∧ m1 −m2 6= N , con N entero.
En ese caso es claro que al resolver la ecuacion indicadora y sustituir m1 en (9.12), se van despejandotodos los coeficientes a1, . . . , an en terminos de a0. Notemos que siempre se cumplira, en (9.12), queµ(m1 + n) 6= 0. Igualmente al sustituir m2 encontramos la otra solucion y ambas son linealmenteindependientes. La solucion general sera
y(x) = C1 xm1
∞∑n=0
anxn + C2 x
m2
∞∑n=0
anxn , x > 0 ,
para x < 0, debemos reemplazar xm1 por |x|m1 y xm2 por |x|m2 en la solucion anterior.
Por ejemplo, encontremos la solucion en terminos de series de Frobenius de la siguiente ecuacion
x2 y′′ + x
(x+
1
2
)y′ −
(x2 +
1
2
)y = 0 .
Al dividir por x2 identificamos que x = 0 es un punto singular regular.
y′′ +1
x
(x+
1
2
)y′ − 1
x2
(x2 +
1
2
)y = 0 .
332

Borra
dor Pre
limin
ar
9.3. EL METODO DE FROBENIUS
Proponemos por lo tanto una serie de Frobenius: y(x) = xm∑∞n=0 anx
n. Necesitamos ahora haceralgunas identificaciones fundamentales de esta ultima ecuacion
f1(x) =1
2+ x , f2(x) = −1
2− x2 ⇒
b0 = 12 , b1 = 1
c0 = − 12 , c1 = 0 , c2 = −1 ,
el resto de los coeficientes son: b2 = b3 = · · · = 0 y c3 = c4 = · · · = 0. Ademas f1(x) y f2(x) son validaspara todo x.
En cuanto a la ecuacion indicadora tenemos lo siguiente:
µ(m) = m (m− 1) + b0m+ c0 = 0 ⇒ m (m− 1) +1
2m− 1
2= 0 ⇒
m1 = 1
m2 = − 12
Las dos raıces son diferentes y su diferencia no es un entero: 1− (−1/2) = 3/2.
Ahora podemos ir directamente al coeficiente de xm+n en (9.9) pues sabemos los valores de todos loscoeficientes {bi} y {ci}. Por lo tanto:
an
[(m+ n) (m+ n− 1) +
1
2(m+ n)− 1
2
]+ an−1 (m+ n− 1)− an−2 = 0
an
[m2 + 2mn− 1
2m+ n2 − 1
2n− 1
2
]+ an−1 (m+ n− 1)− an−2 = 0
Con lo cual la relacion de recurrencia general sera
an =an−2 − an−1 (m+ n− 1)
m2 + 2mn− 12m+ n2 − 1
2n−12
, para n ≥ 2 ,
dependiendo del valor de m tendremos una relacion de recurrencia diferente.
• Para m = 1. En este caso se obtiene:
an =2 (an−2 − nan−1)
2n2 + 3npara n ≥ 2 .
Note que podemos encontrar a1 a partir del coeficiente de xm+1 en la ecuacion (9.9):
a1
[1 (1 + 1) +
1
2(1 + 1)− 1
2
]+ a0 [1 + 0] = 0 ⇒ a1 = −2
5a0
con lo cual
n = 2 ⇒ a2 = 17 (a0 − 2a1) = 1
7
(a0 + 4
5a0
)= 9
35a0 ⇒ a2 = 935a0
n = 3 ⇒ a3 = 227 (a1 − 3a2) = 2
27
(− 2
5a0 − 2735a0
)= − 82
945a0 ⇒ a3 = − 82945a0
n = 4 ⇒ a4 = 122 (a2 − 4a3) = 1
22
(935a0 + 328
945a0
)= 571
20790a0 ⇒ a4 = 57120790a0
......
333

Borra
dor Pre
limin
ar
9.3. EL METODO DE FROBENIUS
Ası la primera solucion sera
y1(x) = a0 x
(1− 2
5x+
9
35x2 − 82
945x3 +
571
20790x4 + · · ·
).
• Para m = − 12 . En este caso, la relacion de recurrencia es:
an =2(an−2 −
(n− 3
2
)an−1
)2n2 − 3n
para n ≥ 2 ,
nuevamente, a1 se obtiene del coeficiente de xm+1 en la ecuacion (9.9):
a1
[1
2
(−1
2
)+
(1
2
)(1
2
)− 1
2
]+ a0
[−1
2
]= 0 ⇒ a1 = −a0 ,
por lo tanto:
n = 2 ⇒ a2 = a0 − 12a1 = a0 + 1
2a0 = 32a0 ⇒ a2 = 3
2a0
n = 3 ⇒ a3 = 29
(a1 − 3
2a2
)= 2
9
(−a0 − 9
4a0
)= − 13
18a0 ⇒ a3 = − 1318a0
n = 4 ⇒ a4 = 110
(a2 − 5
2a3
)= 1
10
(32a0 + 65
36a0
)= 119
360a0 ⇒ a4 = 119360a0
......
Por lo cual, la solucion general sera
y(x) = C1x
[1− 2
5x+
9
35x2 − 82
945x3 +
571
20790x4 + · · ·
]+C2
x12
[1− x+
3
2x2 − 13
18x3 +
119
360x4 + · · ·
].
Notese que esta solucion vale para 0 < x < ∞. Por cuanto para x < 0, la segunda solucion se haceimaginaria pero se puede resolver haciendo C2 = i C3.
Caso 2: m1 = m2
Pongamos nuevamente nuestra atencion en la ecuacion (9.8):
x2 y′′ + x f1 (x) y′ + f2 (x) y = 0 ,
donde f1 (x) y f2 (x) son analıticas en x = 0. Reacomodemos esta ultima ecuacion de la forma
x2 y′′ + x f1 (x) y′ + f2 (x) y =
{x2 d2
dx2+ x f1 (x)
d
dx+ f2 (x)
}y ≡ L [y] = 0 ,
donde L {•} esta concebido como un operador lineal. Recordamos que si y(x) = xm∑∞n=0 anx
n, en-tonces
L [y] ≡ a0µ (m)xm +
∞∑n=1
[anµ (m+ n) +
n−1∑k=0
ak [(m+ k) bn−k + cn−k]
]xm+n ,
si anulamos los coeficientes de xm+n entonces
anµ (m+ n) +
n−1∑k=0
ak [(m+ k) bn−k + cn−k] = 0 ⇔ an = −∑n−1k=0 ak [(m+ k) bn−k + cn−k]
µ (m+ n),
334

Borra
dor Pre
limin
ar
9.3. EL METODO DE FROBENIUS
considerando que µ (m+ n) 6= 0.
Por lo tanto, para los an seleccionados (que anulen el coeficiente xm+n) y tomando el caso cuando lasraıces estan repetidas, es decir, m1 = m2 = m se tiene lo siguiente:
L [y] (m,x) = a0µ (m)xm = a0 (m−m1)2xm .
Notese que estamos considerando L [y] (m,x) como una funcion de m y x. Por lo cual, al evaluar parala raız m = m1 resulta
L [y] (m,x)|m=m1= a0 (m−m1)
2xm∣∣∣m=m1
= 0 .
Veamos algo mas interesante, intentemos derivar respecto a la constante m
∂m [L [y]] = ∂m
[{x2 d2
dx2+ x f1 (x)
d
dx+ f2 (x)
}y
]=
{x2 d2
dx2+ x f1 (x)
d
dx+ f2 (x)
}∂my
L [∂my] = ∂m
[a0 (m−m1)
2xm]
= a0
[(m−m1)
2xm ln(x) + 2 (m−m1) xm
],
comprobamos que tambien se anula cuando evaluamos en m = m1
L [∂my]m=m1= a0
[(m−m1)
2xm lnx+ 2 (m−m1) xm
]m=m1
= 0 ,
por lo tanto tambien es solucion. Con lo cual una segunda solucion puede construirse de la siguientemanera
y2(x) = ∂my|m=m1 = ∂m
[xm
[a0 +
∞∑n=1
an (m)xn
]]m=m1
= xm1 ln(x)
[a0 +
∞∑n=1
an (m1)xn
]+ xm1
∞∑n=1
∂m [an (m1)]xn
= y1(x) ln(x) + xm1
∞∑n=1
Bn (m1)xn ,
donde hemos denotado ∂m [an (m1)] = Bn (m1).
La solucion general tendra la forma
y(x) = C1xm
[1 +
∞∑n=1
an (m)xn
]+ C2
[xm
[1 +
∞∑n=1
an (m)xn
]ln(x) + xm
∞∑n=0
Bn (m)xn
],
= xm
[1 +
∞∑n=1
an (m)xn
][C1 + C2 ln(x)] + C2 x
m∞∑n=0
Bn (m)xn , x > 0 .
Veamos el siguiente ejemplo: analicemos un caso particular de la ecuacion de Bessel5
x2 y′′ + x y′ +(x2 + ν2
)y = 0 .
5Fredrich Wilhel Bessel (1784-1846). Astronomo y matematico aleman. Aporto notables contribuciones a la astronomıaposicional, la geodesia y la mecanica celeste. Particularmente, se dedico a aumentar la exactitud de las mediciones de laposicion y el movimiento de los astros. La precision de sus mediciones hizo posible que determinara pequenas irregularidadesen los movimientos de Urano lo condujo a predecir la existencia de Neptuno. Analogos razonamientos lo llevaron a especularsobre la presencia de estrellas companeras en Sirio y Procyon. A partir de datos registrados en el siglo XVII, calculo la orbitadel cometa Halley
335

Borra
dor Pre
limin
ar
9.3. EL METODO DE FROBENIUS
La ecuacion viene parametrizada por ν y dependiendo de su valor tendremos una familia de soluciones.Consideremos el caso ν = 0:
x2 y′′ + x y′ + x2 y = 0 ⇒ y′′ +1
xy′ +
x2
x2y = 0 .
Podemos ver que:
f1(x) = 1 , f2(x) = x2 ⇒
b0 = 1
c0 = 0 , c1 = 0 , c2 = 1
el resto de los coeficientes son cero. De la ecuacion indicadora vemos lo siguiente:
µ(m) = m (m− 1) + b0m+ c0 = 0 ⇒ m (m− 1) +m = m2 = 0 ⇒
m1 = 0
m2 = 0
Por lo tanto, la relacion de recurrencia se obtiene del coeficiente de xm+n de (9.9)
an [(m+ n) (m+ n− 1) + (m+ n)] + an−2 = 0 ⇒ an(m) = − an−2
(m+ n) (m+ n− 1) + (m+ n)
tomando m = 0, se tiene:
an(0) = −an−2
n2para n ≥ 2 .
Otra vez, al anular el coeficiente para xm+1 (ecuacion (9.9)) se obtiene:
a1[0 (0 + 1) + (0 + 1) + 0] + a0 [0 + 0] = 0 ⇒ a1 = 0 .
Con lo cual, es claro que se anulan todos los coeficientes impares, y ası
a2n = −a2n−2
(2n)2 para n = 1, 2, 3, . . .
tenemos entonces lo siguiente:
n = 1 ⇒ a2 = −1
4a0 ⇒ a2 = − 1
4a0
n = 2 ⇒ a4 = − 1
(2 · 2)2 a2 =
1
(2 · 2)2
22a0 ⇒ a4 =
1
(2 · 2)2
22a0
n = 3 ⇒ a6 = − 1
(2 · 3)2 a4 = − 1
(2 · 3)2
[1
(2 · 2)2
22a0
]⇒ a6 =
−1
(2 · 3)2
23a0
......
n = n ⇒ a2n = −a2n−2
(2n)2 =
(−1)n
22n (n!)2 a0 ⇒ a2n =
(−1)n
22n (n!)2 a0
La primera de las soluciones sera
y1 (x) = a0
[1 +
∞∑n=1
(−1)n
22n (n!)2x
2n
]= a0J0(x) .
336

Borra
dor Pre
limin
ar
9.3. EL METODO DE FROBENIUS
Donde J0 (x) se conoce como la funcion de Bessel de primera especie de orden cero. Para calcular lasegunda solucion de la ecuacion de Bessel se sustituye
y2 (x) = J0 (x) ln(x) +
∞∑n=0
Bnxn en la ecuacion: x2y′′ + xy′ + x2y = 0 ,
para ello se requieren sus derivadas
y′2 = J ′0 ln(x) +J0
x+
∞∑n=1
Bnnxn−1 , y′′2 = J ′′0 ln(x) + 2
J ′0x− J0
x2+
∞∑n=2
Bnn (n− 1)xn−2 ,
entonces, al sustituir en la ecuacion diferencial:
x2
[J ′′0 ln(x) + 2
J ′0x− J0
x2+
∞∑n=2
Bnn (n− 1)xn−2
]+ x
[J ′0 ln(x) +
J0
x+
∞∑n=1
Bnnxn−1
]+
x2
[J0 ln(x) +
∞∑n=0
Bnxn
]= 0x2J ′′0 + xJ ′0 + x2J0︸ ︷︷ ︸
=0
ln(x) + 2xJ ′0 +
∞∑n=2
Bnn (n− 1)xn +
∞∑n=1
Bnnxn +
∞∑n=0
Bnxn+2 = 0
por lo tanto:
B1x+ 22B2x2 +
∞∑n=3
(Bnn
2 +Bn−2
)xn = −2
∞∑n=1
(−1)n
2n
22n (n!)2 x
2n .
Es claro que para los coeficientes impares se obtiene B1 = B3 = B5 = · · · = B2n+1 · · · = 0, ya que
B1x+ 22B2x2 +
(32B3 +B1
)x3 +
(42B4 +B2
)x4 +
(52B5 +B3
)x5 + · · · = −2
∞∑n=1
(−1)n
2n
22n (n!)2 x
2n ,
mientras que para las potencias pares tendremos la relacion de recurrencia
B2n =1
(2n)2
[(−1)
n+1n
22(n−1) (n!)2 −B2n−2
],
como se puede ver:
B2 = 21
22 (1!)2
B4 =1
(2 · 2)2
[− 4
22 (2!)2 − 2
1
22 (1!)2
]= − 1
4222
[1 +
1
2
]
B6 =1
(6)2
[3
24 (3!)2 −B4
]=
1
62
[3
24 (3!)2 +
1
4222
[1 +
1
2
]]=
1
624222
[1 +
1
2+
1
3
]...
...
B2k =(−1)
k+1
22k (k!)2
[1
k+
1
k − 1+
1
k − 2+ · · ·+ 1
3+
1
2+ 1
]=
(−1)k+1
22k (k!)2Sk .
337

Borra
dor Pre
limin
ar
9.3. EL METODO DE FROBENIUS
Figura 9.1: Comportamiento de las funciones de Bessel de orden cero. De primera especie J0 (x) y de segundaespecie Y0 (x)
Ası la segunda solucion puede tomar la forma de
y2 (x) = J0 (x) ln(x) +
∞∑n=1
(−1)n+1
22n (n!)2Sn x
2n .
La solucion general se podra escribir como:
y (x) = C1J0 (x) + C2
[J0 (x) ln(x) +
∞∑n=1
(−1)n+1
22n (n!)2Sn x
2n
].
Es costumbre en Fısica reacomodar la segunda solucion de la siguiente manera
y2 (x) ≡ Y0 (x) =2
π
[[γ + ln
(x2
)]J0 (x) +
∞∑n=1
(−1)n+1
22n (n!)2Sn x
2n
],
donde γ se conoce como la constante de Euler-Mascheroni6 y tiene de valor
γ = lımn→∞
(1
n+
1
n− 1+
1
n− 2+ · · ·+ 1
3+
1
2+ 1− ln (n)
)∼= 0,5772 ,
de manera que finalmente:y (x) = C1 J0 (x) + C2 Y0 (x) .
6Lorenzo Mascheroni (1750-1800) Monje Italiano, nacido en Bergamo, Lombardo-Veneto. Profesor de algebra y geometrıaen la Universidad de Pavia y luego rector de la misma. Ademas de poeta, se destaco por sus contribuciones al calculo y a lamecanica.
338

Borra
dor Pre
limin
ar
9.3. EL METODO DE FROBENIUS
Notese que tanto la funcion de Bessel de orden cero, de primera especie, J0 (x), como la funcion deBessel de orden cero, de segunda especie, Y0 (x), tienen un comportamiento oscilatorio cuando x→∞.Ademas J0 (0) = 1, mientras que Y0 (x) se comporta como 2
π ln(x) cuando x→ 0.
Caso 3: m1 6= m2 ∧ m1 −m2 = N , con N entero.
En general, para este caso: m1 − m2 = N ⇒ m1 = N + m2, con m1 > m2. Notemos que podemosescribir las dos raıces como: m y m + N . Entonces, como m + N es una raız satisface tambien laecuacion indicadora:
µ (m+N) = (m+N) (m+N − 1) + b0 (m+N) + c0 = 0 ,
esto significa que µ (m+N) = 0 anula al coeficiente del termino an para n = N del coeficiente xm+n,ecuacion (9.9), como se puede ver a continuacion
an[(m+ n) (m+ n− 1) + b0 (m+ n) + c0] + an−1 [b1 (m+ n− 1) + c1] +
an−2 [b2 (m+ n− 2) + c2] +
an−3 [b3 (m+ n− 3) + c3] +
+ · · ·+ a1 [bn−1 (m+ 1) + cn−1] +
a0 [bnm+ cn] = 0
cuando n = N , se tiene
an[(m+N) (m+N − 1) + b0 (m+N) + c0] +
n−1∑k=0
ak [(m+N − k) bn−k + cn−k] = 0 .
Esto trae como consecuencia que se derivan dos casos:
1.- µ (m+N) = 0 ∧∑N−1k=0 ak [(m+N − k) bn−k + cn−k] = 0.
En este caso, la solucion en serie de Frobenius, partiendo de la raız mayor de la ecuacion indicadora,m+N , quedara en terminos de a0 y no sera linealmente independiente a la solucion provista porla raız menor, por consiguiente la solucion proveniente de esta raız menor, m, sera la soluciongeneral:
y(x) = a0|x|m[
1 +
∞∑n=1
an (m)xn
]+ aN |x|m
∞∑n=0
an (m+N)xn . (9.13)
Un ejemplo: la ecuacion de Bessel, de orden fraccionario, puede ilustrar este caso, resolvamosla
x2y′′ + xy′ +
(x2 − 1
4
)y = 0 .
Veamos entonces que
f1(x) = 1 , f2(x) = −1
4+ x2 ⇒
b0 = 1
c0 = − 14 , c1 = 0 , c2 = 1
339

Borra
dor Pre
limin
ar
9.3. EL METODO DE FROBENIUS
el resto de los coeficientes son iguales a cero. En cuanto a la ecuacion indicadora tenemos losiguiente:
µ(m) = m (m− 1) + b0m+ c0 = 0 ⇒ m (m− 1) +m− 1
4= m2 − 1
4= 0 ⇒
m1 = 12
m2 = − 12
Las dos raıces son diferentes y su diferencia es un entero: N = 1/2 − (−1/2) = 1. La raız maspequena es m = −1/2
Vayamos al coeficiente de xm+1 en (9.9):
a1 [m (m+ 1) + b0 (m+ 1) + c0] + a0 [b1m+ c1] = 0
a1
[m (m+ 1) + (m+ 1)− 1
4
]+ a0 [0m+ 0] = 0
a1
[m2 + 2m+
3
4
]+ a0 [0] = 0 .
Para la raız mas pequena, que es m = −1/2, tendremos
a1
[1
4− 1 +
3
4
]+ a0 [0] = 0
a1 [0] + a0 [0] = 0 ,
el coeficiente de a1 es cero y el del otro coeficiente tambien es cero. Con lo cual cualquier valor dea1 y a0 estaran permitidos.
La relacion de recurrencia proviene de anular el coeficiente de xm+n, para m = −1/2. Vale decir
an
[(−1
2+ n
)(−1
2+ n− 1
)+
(−1
2+ n
)− 1
4
]+ an−1
[0
(−1
2+ n− 1
)+ 0
]+
an−2
[0
(−1
2+ n− 2
)+ 1
]= 0
an
[(−1
2+ n
)(−3
2+ n
)+
(−1
2+ n
)− 1
4
]+ an−1 [0] + an−2 [1] = 0
an[n2 − n
]+ an−2 = 0 .
La relacion de recurrencia sera entonces:
an = − an−2
n2 − ncon n ≥ 2 .
Los coeficientes seran
n = 2⇒ a2 = −1
2a0 n = 3⇒ a3 = −1
6a1
n = 4⇒ a4 = − 1
12a2 =
1
24a0 n = 5⇒ a5 = − 1
20a3 =
1
120a1
n = 6⇒ a4 = − 1
30a4 = − 1
720a0 n = 7⇒ a7 = − 1
42a5 = − 1
5040a1
......
340

Borra
dor Pre
limin
ar
9.3. EL METODO DE FROBENIUS
Por lo cual, la solucion general sera
y(x) = a0 x− 1
2
(1− 1
2x2 +
1
24x4 − 1
720x6 + · · ·
)+a1 x
− 12
(x− 1
6x3 +
1
120x5 − 1
5040x7 + · · ·
),
que es equivalente a:
y(x) = a0 x− 1
2
(1− 1
2x2 +
1
24x4 − 1
720x6 + · · ·
)+ a1 x
12
(1− 1
6x2 +
1
120x4 − 1
5040x6 + · · ·
).
2.- µ (m+N) = 0 ∧∑N−1k=0 ak [(m+N − k) bn−k + cn−k] 6= 0.
En este caso la raız mayor de la ecuacion indicadoram1 = m+N determinara una de las soluciones.
Veamos el siguiente ejemplo: analicemos la siguiente ecuacion diferencial
x2y′′ − x (2− x) y′ +(2 + x2
)y = 0 .
Ahora
f1(x) = −2 + x , f2(x) = 2 + x2 ⇒
b0 = −2 , b1 = 1
c0 = 2 , c1 = 0 , c2 = 1 ,
el resto de los coeficientes son iguales a cero.
Una vez mas, la expansion en serie de Frobenius de y (x) nos lleva a una ecuacion indicadora quedebemos resolver
µ(m) = m (m− 1) + b0m+ c0 = 0 ⇒ m (m− 1)− 2m+ 2 = m2 − 3m+ 2 = 0 ⇒
m1 = 2
m2 = 1
Por lo tanto N = 1.
Veamos nuevamente al coeficiente de xm+1 en (9.9)
a1 [m (m+ 1) + b0 (m+ 1) + c0] + a0 [b1m+ c1] = 0
a1 [m (m+ 1)− 2 (m+ 1) + 2] + a0 [m+ 0] = 0
a1
[m2 −m
]+ a0 [m] = 0 .
Para la raız mas pequena, que es m = 1, tendremos
a1 [0] + a0 [1] = 0 ,
lo cual no conduce a nada por cuanto a0 = 0, mientras que, para m = 2 se obtiene
a1 [2] + a0 [2] = 0 ⇒ a1 = −a0 .
La relacion de recurrencia proviene de anular el coeficiente de xm+n, para m = 2:
an [(2 + n) (2 + n− 1)− 2 (2 + n) + 2] + an−1 [(2 + n− 1) + 0] + an−2 [0 (2 + n− 2) + 1] = 0
an [(2 + n) (1 + n)− 2n− 2] + an−1 [1 + n] + an−2 [1] = 0
an[n2 + n
]+ an−1 [1 + n] + an−2 [1] = 0
por lo tanto:an[n2 + n
]= −an−1 [1 + n]− an−2 , para n ≥ 2 ,
los coeficientes seran
341
Borra
dor Pre
limin
ar
9.3. EL METODO DE FROBENIUS
n = 2⇒ 6a2 = −3a1 − a0 = 3a0 − a0 ⇒ a2 =1
3a0
n = 3⇒ 12a3 = −4a2 − a1 = −4
3a0 + a0 ⇒ a3 = − 1
36a0
......
Por lo cual:
y1(x) = a0 x2
(1− x+
1
3x2 − 1
36x3 + · · ·
),
y la segunda solucion linealmente independiente (se deja como ejercicio) sera
y2(x) = u (x)− bNy1(x) ln(x) , (9.14)
donde N es la diferencia entre las raıces. y1(x) es la solucion en series obtenida a partir de la raızmayor: n+N y u(x) es la serie de Frobenius:
u (x) = xm∞∑i=0
bixi . (9.15)
9.3.1. Ejemplos
9.3.2. Practicando con Maxima
9.3.3. Ejercicios
1. Resuelva la siguiente ecuacion diferencial
2x2 y′′ − x y′ − (x+ 1) y = 0 .
2. Verifique que el origen es una singularidad regular y encuentre la solucion de la siguiente ecuaciondiferencial
x2 y′′ + x y′ +(x2 − 1
)y = 0 .
3. Verifique que el origen es una singularidad regular de cada una de las ecuaciones siguientes. Como lasraıces de la ecuacion indicadora no difieren por un entero y encuentre las dos soluciones linealmenteindependientes
a) x2y′′ + x(x+ 12 )y′ + xy = 0
b) 2x2y′′ + 3xy′ + (2x− 1)y = 0
c) 2xy′′ + (x+ 1)y′ + 3y = 0
d) 2x2y′′ − xy′ + (1− x2)y = 0
4. Verifique que el origen es una singularidad regular de cada una de las ecuaciones siguientes. Comolas raıces de la ecuacion indicadora difieren por un entero encuentre las dos soluciones linealmenteindependientes
a) x2y′′ − x2y′ + (x2 − 2)y = 0
b) x2y′′ + (1 + x3)xy′ − y = 0
342

Borra
dor Pre
limin
ar
9.4. REVISITANDO A BESSEL
c) x2y′′ + xy′ + (x2 − 19 )y = 0
5. Verifique que el origen es una singularidad regular de cada una de las ecuaciones siguientes. Como lasraıces de la ecuacion indicadora se repiten encuentre al menos una de las soluciones
a) x2y′′ − 3y′ + 4(x+ 1)y = 0
b) xy′′ + (1− x)y′ + 12y = 0
9.4. Revisitando a Bessel
La Ecuacion de Bessel esx2y′′ + xy′ +
(x2 − k2
)y = 0; k ∈ < , (9.16)
obviamente x = 0 es una singularidad regular, por lo tanto el metodo de Frobenius nos permite afirmar quesi x = x0 corresponde a un polo regular de la ecuacion
x2y′′ + xf1 (x) y′ + f2 (x) y = 0 ,
la solucion vendra expresada de la forma
y(x) = (x− x0)m∞∑n=0
an (x− x0)n,
con m real y determinado a traves de las raıces de la ecuacion indicadora
m2 + (f1(x0)− 1)m+ f2(x0) = 0 ,
y donde f1 (x) y f2 (x) son funciones analıticas en el entorno de x = x0 y por lo tanto
f1(x0) =
∞∑n=0
bn (x− x0)n ∧ f2(x0) =
∞∑n=0
cn (x− x0)n.
Para la Ecuacion de Bessel (9.16)
f1 (x) = 1 ⇒ b0 = 1 ∧ f2 = −k2 + x2 ⇒ c0 = −k2 , c1 = 0 , c2 = 1 ,
los demas coeficientes b’s y c’s se anulan. La ecuacion indicadora y sus raıces quedan como
m (m− 1) +m− k2 = 0 ⇒ m2 = k2 ⇒ m1,2 = ±k .
Donde, para m = k proponemos
y1(x) = xm∞∑n=0
anxn .
Al hacer las cuentas para cada termino por separado se tiene(x2 − k2
)y1(x) = xk
∞∑n=2
an−2xn − xk
∞∑n=0
k2 anxn
xy′1(x) = xk∞∑n=0
(k + n) anxn
x2y′′1 (x) = xk∞∑n=0
(k + n) (k + n− 1) anxn ,
343
Borra
dor Pre
limin
ar
9.4. REVISITANDO A BESSEL
la ecuacion de Bessel queda como
∞∑n=0
[(k + n) (k + n− 1) + (k + n)− k2
]anx
n +
∞∑n=2
an−2xn = 0
(2k + 1) a1x+
∞∑n=2
[n (2k + n) an + an−2]xn = 0 ,
y por consiguiente obtenemos la relacion de recurrencia
an = − an−2
n (2k + n)para n ≥ 2 ,
donde es claro que a1 = 0. Adicionalmente, como a0 es arbitrario, podemos suponer que
a0 =1
2k Γ (k + 1),
tendremos
a1 = a3 = a5 = · · · = 0
a2 = − a0
2 (2k + 2)
a4 =a0
2 · 4 (2k + 2) (2k + 4)
...
a2n = (−1)n a0
22n n! (k + 1) (k + 2) · · · (k + n).
Por lo tanto, la primera de las soluciones sera
Jk(x) =
∞∑n=0
(−1)n
Γ (n+ 1) Γ (n+ k + 1)
(x2
)2n+k
,
la Funcion de Bessel, de orden k de primera especie.Si k = 0 entonces
J0(x) =
∞∑n=0
(−1)n
(n!)2
(x2
)2n
.
Para el caso particular de k = N entero positivo la funcion de Bessel de primera especie toma la formade
JN (x) =
∞∑n=0
(−1)n
n! (n+N)!
(x2
)2n+N
.
Para encontrar la segunda solucion linealmente independiente de la ecuacion de Bessel el metodo deFrobenius propone tres casos dependiendo el valor de k m1 −m2 6= entero⇒ k 6= entero
m1 = m2 = m⇒ k = 0m1 −m2 = entero⇒ k = entero
344

Borra
dor Pre
limin
ar
9.4. REVISITANDO A BESSEL
Caso 1: m1 −m2 6= entero ⇒ k 6= entero.
La solucion general sera de la forma
y(x) = C1Jk(x) + C2J−k(x) ,
donde
J−k(x) =
∞∑n=0
(−1)n
Γ (n+ 1) Γ (n− k + 1)
(x2
)2n−kx > 0
Para x < 0 se debe reemplazar x−k por |x|−k.
Notese que esta ultima expresion tambien es valida para k semientero, i.e. k = n+ 12 .
Caso 2: m1 = m2 = m ⇒ k = 0.
La solucion general sera de la forma
K0(x) =
∞∑n=0
anxn + J0(x) ln(x) ,
y los coeficientes an se encuentran mediante el tradicional metodo de sustituirlos en la ecuacion deBessel para k = 0
xy′′ + y′ + xy = 0 .
345

Borra
dor Pre
limin
ar
9.4. REVISITANDO A BESSEL
De donde se obtiene
xK0(x) =
∞∑n=0
anxn+1 + xJ0(x) ln(x) =
∞∑n=3
an−2xn−1 + xJ0(x) ln(x)
K ′0(x) =
∞∑n=0
nanxn−1 + (J0(x) ln(x))
′=
∞∑n=1
nanxn−1 + J ′0(x) ln(x) +
J0(x)
x
xK ′′0 (x) =
∞∑n=2
n (n− 1) anxn−1 + xJ ′′0 (x) ln(x) + 2J ′0(x)− J0(x)
x,
y por lo tanto
a1 + 4a2x+
∞∑n=3
[n2an + an−2
]xn−1 +
xJ ′′0 + J ′0 + xJ0︸ ︷︷ ︸= 0
ln(x) + 2J ′0(x) = 0 .
Acomodando y derivando la expresion para J0 tendremos
a1 + 4a2x+
∞∑n=3
[n2an + an−2
]xn−1 = −2J ′0(x) = 2
∞∑n=1
2n
22n−1
(−1)n+1
(n!)2 x2n−1 .
Ahora multiplicando la expresion por x y separando las sumatorias en sus terminos pares e impares,tendremos
a1x+
∞∑n=1
[(2n+ 1)
2a2n+1 + a2n−1
]x2n+1 = 0
∞∑n=2
[(2n)
2a2n + a2n−2
]x2n + 4a2x
2 = x2 +
∞∑n=1
(−1)n+1 2n
22n (n!)2x
2n .
Por lo cual a1 = a3 = a5 = · · · = 0 mientras que
4a2 = 1; (2n)2a2n + a2n−2 = (−1)
n+1 2n
22n (n!)2 n > 1 .
De esta forma los coeficientes quedan como:
a2 =1
22
a4 = − 1
22 · 42
(1 +
1
2
)= − 1
24 · (2!)2
(1 +
1
2
)...
a2n =(−1)
n+1
22n (n!)2
{1 +
1
2+
1
3+
1
4+ · · ·+ 1
k
}.
La expresion para la solucion general de la ecuacion de Bessel para k = 0 sera
K0(x) =
∞∑n=0
(−1)n+1
(n!)2
{1 +
1
2+
1
3+
1
4+ · · ·+ 1
k
}(x2
)2n
+ J0(x) ln(x) .
346

Borra
dor Pre
limin
ar
9.4. REVISITANDO A BESSEL
En Fısica, es costumbre expresar esta solucion de una forma equivalente pero ligeramente diferente:
Y0(x) = − 2
π
∞∑n=0
(−1)n
(n!)2
{1 +
1
2+
1
3+ · · ·+ 1
k
}(x2
)2n
+2
πJ0(x)
[ln(x
2
)+ γ],
donde, como ya hemos visto, γ = 0,577215664901 · · · es la constante de Euler-Mascheroni.
Caso 3: m1 −m2 = entero ⇒ k = entero.
La solucion general sera de la forma
Kk(x) =
∞∑n=0
anxk+n + CJn(x) ln(x) .
Procediendo de forma equivalente a la situacion anterior tenemos que la solucion general podra expre-sarse (luego de una laboriosa faena) como
Kk(x) = −1
2
k−1∑n=0
(k − n− 1)!
n!
(x2
)2n−k−Hk
2k!
(x2
)k− 1
2
∞∑n=1
(−1)n
[Hn +Hn+k]
n! (k + n)!
(x2
)2n+k
+Jk(x) ln(x) .
Y finalmente la Funcion de Bessel de orden k de segunda especie o Funcion de Neumann
Yk(x) = − 1
π
k−1∑n=0
(k − n− 1)!
(n!)2
(x2
)2n−k− Hk
πk!
(x2
)k− 1
π
∞∑n=1
(−1)n
[Hn +Hn+k]
n! (k + n)!
(x2
)2n+k
+2
πJk(x)
[ln(x
2
)+ γ].
En ambos casos
Hn = 1 +1
2+
1
3+ · · ·+ 1
n
Mas aun
Yk(x) =2
πJk(x) ln
x
2− 1
π
k−1∑n=0
(k − n− 1)!
(n!)2
(x2
)2n−k
− 1
π
∞∑n=1
(−1)n
n! (k + n)!
(x2
)2n+k
[ψ(n+ 1) + ψ(n+ k + 1)] ,
donde ψ(n) =Γ′(n)
Γ(n)es la funcion Digamma con
ψ(n+ 1) = −γ + 1 +1
2+
1
3+ · · ·+ 1
n, ψ(1) = −γ .
Tambien es costumbre definir la funcion de Bessel de segunda especie en terminos de las de primeraespecie
Nk(x) = Yk(x) =Jk(x) cos(kπ)− J−k(x)
sen(kπ).
347

Borra
dor Pre
limin
ar
9.4. REVISITANDO A BESSEL
Notese que para k = N entero, aparentemente no esta definida. Pero, aplicando la regla de L’Hospital
NN (x) =
d
dk[Jk(x) cos(kπ)− J−k(x)]
d
dk[sen(kπ)]
∣∣∣∣∣∣∣k=N
=
−πJn(x)sen(nπ) +
{cos(nπ)
d
dkJk(x)− d
dkJ−k(x)
}π cos(nπ)
∣∣∣∣∣∣∣∣k=N
=1
π
[d
dkJk(x)− (−1)
n d
dkJ−k(x)
]k=N
.
De este modo, la soluciones generales para la ecuacion de Bessel, se expresan segun el caso en
Zk(x) = C1Jk(x) + C2J−k(x); k 6= entero
Zk(x) = C1Jk(x) + C2Yk(x); k = 0 ∨ entero
La funciones Zk(x) y Zk(x) se denominan Funciones Cilındricas de orden k.
9.4.1. Otras formas de la ecuacion de Bessel
Haciendo los cambios de variables correspondientes llegamos a
u′′(x) +1− 2α
xu′(x) +
[(βν xν−1
)2+α2 − k2ν2
x2
]u(x) = 0 ,
348

Borra
dor Pre
limin
ar
9.4. REVISITANDO A BESSEL
dondeu(x) = xαZk(βxν) ,
o tambienu′′(x) + αxν u(x) = 0 ,
con
u(x) =√xZ 1
ν+2
(2√α
ν + 2x1+ ν
2
).
9.4.2. Relaciones de recurrencia:
Las funciones de Bessel tienen las siguientes relaciones de recurrencia
xJk+1(x)− 2k Jk(x) + xJk−1(x) = 0
Jk+1(x) + 2J ′k(x)− Jk−1(x) = 0
Para demostrar estas relaciones partimos por demostrar lo siguiente:[xkJk(x)
]′= xkJk−1(x) ∧
[x−kJk(x)
]′= −x−kJk+1(x) .
De la expresion para Jk(x) se obtiene[ ∞∑n=0
(−1)n
Γ (n+ 1) Γ (n+ k + 1)
(x2
)2n+2k]′
=
∞∑n=0
(−1)n
2 (n+ k)x2n+2k−1
22n+kΓ (n+ 1) Γ (n+ k + 1)
= xk∞∑n=0
(−1)nx2n+(k−1)
22n+(k−1)Γ (n+ 1) Γ (n+ k)
= xkJk−1(x) .
Unos cambios apropiados nos llevan a demostrar las segunda de las relaciones y al desarrollar las derivadas[xkJk(x)
]′= kxk−1Jk(x) + xkJ ′k(x) = xkJk−1(x)[
x−kJk(x)]′
= −kx−k−1Jk(x) + x−kJ ′k(x) = −x−kJk+1(x)
Por lo cual
kJk(x) + xJ ′k(x) = xJk−1(x)
−kJk(x) + xJ ′k(x) = −xJk+1(x) .
Al sumar y restar miembro a miembro obtenemos las relaciones de recurrencia. Es obvia la importanciaque adquieren J1(x) y J0(x) para generar el resto de las funciones de Bessel.
9.4.3. Funciones de Bessel y las funciones elementales
Las funciones de Bessel de orden semientero, k = 12 se expresa como
J1/2(x) =
√x
2
∞∑n=0
(−1)n
Γ (n+ 1) Γ(n+ 3
2
) (x2
)2n
,
349

Borra
dor Pre
limin
ar
9.4. REVISITANDO A BESSEL
pero como
Γ
(n+
3
2
)=
{3
2· 5
2· · · · 2n+ 1
2
}= Γ
(3
2
)1 · 3 · 5 · · · (2n+ 1)
2n,
se encuentra que
J1/2(x) =
√x
2
∞∑n=0
(−1)n
2n n!Γ(
32
)1 · 3 · 5 · · · (2n+ 1)
x2n
=x√
2xΓ(
32
) {1− x2
2 · 3+
x4
2 · 4 · 3 · 5− x6
2 · 4 · 6 · 3 · 5 · 7+ · · ·
}=
1√2xΓ
(32
) {1− x3
3!+x5
5!− x7
7!+ · · ·
}=
1√2xΓ
(32
) sen(x) .
Finalmente, y otra vez invocando a las propiedades de la funcion Gamma: Γ(
32
)=√π
2
J1/2(x) =
√2
πxsen(x) .
Equivalentemente se puede demostrar que
J−1/2(x) =
√2
πxcos(x) ,
y ahora utilizando las relaciones de recurrencia tendremos que
J3/2(x) = −J−1/2(x) +1
xJ1/2(x) =
√2
πx
[sen(x)
x− cos(x)
].
Ası mismo
J5/2(x) = −J1/2(x) +3
xJ3/2(x) =
√2
πx
[3sen(x)
x2− 3 cos(x)
x− sen(x)
].
En general
Jn+ 12(x) = (−1)
n
√2
πxn+ 1
2dn
(xdx)n
(sen(x)
x
)n = 1, 2, 3, · · ·
Jn+ 12(x) =
√2
πxn+ 1
2dn
(xdx)n
(cos(x)
x
)n = −1,−2,−3, · · ·
Las funciones de Bessel de orden semientero son las unicas funciones de Bessel que pueden ser expresadasen terminos de funciones elementales.
9.4.4. Reflexion
Las funciones de Bessel cumplen con
J−k(x) = (−1)kJk(x) .
Para el caso k = N entero positivo la Funcion de Bessel de primera especie toma la forma de
JN (x) =
∞∑n=0
(−1)n
n! (n+N)!
(x2
)2n+N
350

Borra
dor Pre
limin
ar
9.4. REVISITANDO A BESSEL
Si k = −N , un entero negativo, los primeros N terminos de la serie anterior se anulan ya que Γ(n) → ∞para n = −1,−2,−3, · · · y la serie se arma como
J−N (x) =
∞∑n=N
(−1)n
n! (n−N)!
(x2
)2n+N
=
∞∑l=0
(−1)l+N
(l +N)! l!
(x2
)2l+N
J−N (x) = (−1)NJN (x) .
9.4.5. Funcion generatriz
La funcion generatriz para las Funciones de Bessel es
B(x, t) = ex2 (t− 1
t ) ,
desarrollando las dos series para las exponenciales
ext2 = 1 +
x
2t+
x
222!t2 + · · ·+ xn
2nn!tn + · · ·
ex2t = 1− x
2t−1 +
x
222!t−2 + · · ·+ (−1)
nxn
2nn!t−n + · · ·
Por lo tanto multiplicando ambas series
B(x, t) = ex2 (t− 1
t ) =
∞∑n=0
xn
2nn!tn
∞∑n=0
(−1)nxn
2nn!t−n =
∞∑n=−∞
Jn(x) tn
9.4.6. Representacion integral para las funciones de Bessel
En la expresion anterior para la funcion generatriz se realiza el siguiente cambio de variable t = eiθ deeste modo
ex2 (t− 1
t ) = eixsen(θ) = cos (xsen(θ)) + isen (xsen(θ)) ,
y por lo tanto
cos (xsen(θ)) + isen (xsen(θ)) =
∞∑n=−∞
Jn(x) [cos (nθ) + isen (nθ)] ,
igualando partes reales e imaginarias y recordando que J−m(x) = (−1)mJm(x), para anular los terminos
impares en la serie de la parte real y los pares en la de la parte imaginaria, podemos escribir
cos (xsen(θ)) = J0(x) + 2
∞∑n=1
J2n(x) cos (2nθ)
sen (xsen(θ)) = 2
∞∑n=0
J2n+1(x)sen ([2n+ 1] θ) .
Multiplicando miembro a miembro en la primera de ellas por cos (2kθ) (y por cos ([2k + 1] θ) ) y lasegunda por sen ([2k + 1] θ) (y por sen (2kθ)). Integrando (en 0 ≤ θ ≤ π), tambien miembro a miembro y
351

Borra
dor Pre
limin
ar
9.4. REVISITANDO A BESSEL
termino por termino en las series, se obtienen
J2n(x) =1
π
∫ π
0
cos (xsen(θ)) cos (2nθ) dθ
0 =1
π
∫ π
0
cos (xsen(θ)) cos ([2n+ 1] θ) dθ
J2n+1(x) =1
π
∫ π
0
sen (xsen(θ)) sen ([2n+ 1] θ) dθ
0 =1
π
∫ π
0
sen (xsen(θ)) sen (2nθ) dθ .
Sumando miembro a miembro primera con cuarta y segunda con tercera tendremos la expresion integralpara las funciones de Bessel
Jn(x) =1
π
∫ π
0
cos (cos (nθ)− xsen(θ)) dθ ,
ya que todos sabemos que
cos (nθ − xsen(θ)) = cos (2nθ) cos (xsen(θ)) + sen (2nθ) sen (xsen(θ)) .
9.4.7. Ortogonalidad de las funciones de Bessel
Haciendo el caso particular de α = 0 y ν = 1 en la primera de las expresiones equivalentes para laecuacion de Bessel, tendremos
u′′(x) +1
xu′(x) +
[β2 − k2
x2
]u(x) = 0 , donde u(x) = Jk(βx) ,
multiplicando por x la ecuacion diferencial puede ser reescrita como
[xJ ′k(βx)]′+
[β2x− k2
x
]Jk(βx) = 0 ,
suponiendo k real y positivo, planteamos la ecuacion para dos ındices diferentes β1 y β2 por lo tanto quedancomo
[xJ ′k(β1x)]′+
[β2
1x−k2
x
]Jk(β1x) = 0
[xJ ′k(β2x)]′+
[β2
2x−k2
x
]Jk(β2x) = 0 .
Multiplicando apropiadamente por Jk(β1x) y Jk(β2x), Integrando y restando miembro a miembro ten-dremos que
(β2
2 − β21
) ∫ 1
0
xJk(β1x)Jk(β2x)dx =
∫ 1
0
{Jk(β2x) [xJ ′k(β1x)]
′ − Jk(β1x) [xJ ′k(β2x)]′}
dx
=
∫ 1
0
[Jk(β2x)xJ ′k(β1x)− Jk(β1x)xJ ′k(β2x)]′dx
= Jk(β2x)xJ ′k(β1x)− Jk(β1x)xJ ′k(β2x)|x=1x=0
352

Borra
dor Pre
limin
ar
9.4. REVISITANDO A BESSEL
ν rJ 0 ν rJ 1 ν rJ 3 ν rY 0 ν rY 1 ν rY 2 ν
1 2.404825558 3.831705970 5.135622302 0.8935769663 2.197141326 3.3842417672 5.520078110 7.015586670 8.417244140 3.957678419 5.429681041 6.7938075133 8.653727913 10.17346814 11.61984117 7.086051060 8.596005868 10.023477984 11.79153444 13.32369194 14.79595178 10.22234504 11.74915483 13.209986715 14.93091771 16.47063005 17.95981949 13.36109747 14.89744213 16.378966566 18.07106397 19.61585851 21.11699705 16.50092244 18.04340228 19.539039997 21.21163663 22.76008438 24.27011231 19.64130970 21.18806893 22.693955948 24.35247153 25.90367209 27.42057355 22.78202805 24.33194257 25.845613729 27.49347913 29.04682854 30.56920450 25.92295765 27.47529498 28.9950804010 30.63460647 32.18967991 33.71651951 29.06403025 30.61828649 32.14300226
Cuadro 9.1: Los ceros de las funciones de Bessel Jn(x) y de la funcion de Newmann Yn(x).
para βi las raıces de los polinomios de Bessel, i.e. Jk(βi) = 0 podemos deducir que las funciones de Besselson ortogonales (
β2i − β2
j
) ∫ 1
0
xJk(βix)Jk(βjx)dx ∝ δij .
Mas aun, partiendo de la ecuacion de Bessel original se puede llegar a
|Jk(βx)|2 =1
2[J ′k(β)]
2+β2 − k2
2β2[Jk(β)]
2.
9.4.8. Ejemplos
9.4.9. Practicando con Maxima
9.4.10. Ejercicios
353

Borra
dor Pre
limin
arCapıtulo 10Funciones Especiales
354

Borra
dor Pre
limin
ar
10.1. FUNCION GAMMA
10.1. Funcion Gamma
Es la generalizacion del factorial n! el cual solo esta definido para enteros, mientras que Γ (z) esta definidapara toda variable compleja z con parte real positiva.
Γ (z) se define indistintamente como:
Γ (z) =
∫ ∞0
e−ttz−1dt ≡ (z − 1)! ≡∏
(z − 1) Re z > 0
Γ (z) = lımn→∞
1 · 2 · 3 · · · · · nz (z + 1) (z + 2) · · · (z + n)
nz
1
Γ (z)= zeγz
∞∏n=1
(1 +
z
n
)e−
zn ,
donde n es un entero positivo yγ = 0,577215664901 · · ·
se conoce como la constante de Euler-Mascheroni:Tambien es frecuente encontrar Γ (z) con algunas variantes cosmeticas:
Γ (z) = 2
∫ ∞0
e−t2
t2z−1dt =
∫ 1
0
[ln
(1
t
)]z−1
dt = kz∫ ∞
0
e−kttz−1dt .
Para probar la equivalencia de las dos primeras definiciones inventamos las siguiente funcion de dosvariables
F (z, n) =
∫ n
0
(1− t
n
)ntz−1dt , Re z > 0 ,
y como es conocido que
lımn→∞
(1− t
n
)n≡ e−t ,
entonces
lımn→∞
F (z, n) = F (z,∞) =
∫ ∞0
e−ttz−1dt ≡ Γ (z) .
Con lo cual queda demostrada la primera de propuestas de Euler.Para construir la segunda partimos de la misma funcion F (z, n) y un cambio estrategico de variable
u = tn .
F (z, n) = nz∫ n
0
(1− u)nuz−1du Re z > 0 .
Un par de integraciones por partes nos llevan a comprobar
F (z, n) = nz
{(1− u)
n uz
z
∣∣∣∣10
+n
z
∫ 1
0
(1− u)n−1
uzdu
}
= nz
{(1− u)
n−2uz+1n(n− 1)
z(z + 1)
∣∣∣∣10
+n(n− 1)
z(z + 1)
∫ 1
0
(1− u)n−2
uz+1du
},
que el primer termino se anula siempre.
355

Borra
dor Pre
limin
ar
10.1. FUNCION GAMMA
Repitiendo el proceso n veces
F (z, n) = nz{
n(n− 1)(n− 2)(n− 3) · · · 3 · 2 · 1z(z + 1)(z + 2)(z + 3) · · · (z + n− 1)
}∫ 1
0
uz+n−1du
= nz{n(n− 1)(n− 2)(n− 3) · · · 3 · 2 · 1z(z + 1)(z + 2)(z + 3) · · · (z + n)
},
una vez mas, haciendo
lımn→∞
F (z, n) = F (z,∞) = lımn→∞
nz{n(n− 1)(n− 2)(n− 3) · · · 3 · 2 · 1z(z + 1)(z + 2)(z + 3) · · · (z + n)
}≡ Γ (z) .
Se completa la equivalencia para la primera y segunda definiciones de Euler.En particular, de la primera de las definiciones se tiene por integracion directa
Γ (1) =
∫ ∞0
e−tdt = 1
Γ
(1
2
)=
∫ ∞0
e−tt−1/2dt =
∫ ∞0
e−u2
du =√π ,
mientras que de la segunda, si z = n = 1, 2, 3, · · · , se obtiene
Γ (n+ 1) = n!
Γ
(n+
1
2
)=
1 · 3 · 5 · · · · (2n− 1)
2n√π .
Finalmente la tercera de las definiciones de la funcion Γ (z) viene expresada en termino de un productoinfinito (Weierstrass). Este puede demostrarse partiendo de la segunda definicion de Euler
Γ (z) = lımn→∞
1 · 2 · 3 · · · · · nz (z + 1) (z + 2) · · · (z + n)
nz
= lımn→∞
1
z
n∏m=1
(m
m+ z
)nz = lım
n→∞
1
z
n∏m=1
(1 +
z
m
)−1
nz ,
por lo tanto
1
Γ (z)= z lım
n→∞
n∏m=1
(1 +
z
m
)e−z lnn .
Ahora bien, multiplicando y dividiendo por
n∏m=1
ez/m = ez(∑nm=1
1m ) ,
nos queda
1
Γ (z)= z
{lımn→∞
ez((∑nm=1
1m )−lnn)
}{lımn→∞
n∏m=1
(1 +
z
m
)e−z/m
}.
Donde la serie exponente del primero de los terminos converge a un valor constante y cual ha quedadobautizado como la constante de Euler-Mascheroni
γ = lımn→∞
{1 +
1
2+
1
3+
1
4+ · · · 1
n− lnn
}= lımn→∞
{(n∑
m=1
1
m
)− lnn
}γ = 0,5772156649015328606065112 · · ·
356

Borra
dor Pre
limin
ar
10.1. FUNCION GAMMA
Con lo cual queda demostrada la tercera de las propuestas para expresar la Funcion Gamma
1
Γ (z)= zeγz
∞∏n=1
(1 +
z
n
)e−z
n .
Es facil comprobar las siguientes propiedades
Γ (z + 1) = z Γ (z)
Γ (z) Γ (1− z) =
∫ ∞0
xz−1dx
(1 + x)=
π
sen(πz)
22z−1Γ (z) Γ
(z +
1
2
)=√π Γ (2z) .
La primera de ellas (la relacion de recurrencia) es trivial y se obtiene integrando por partes la definicionintegral de Euler.
Γ (z + 1) =
∫ ∞0
e−ttzdt = ze−ttz−1∣∣∞0
+ z
∫ ∞0
e−ttz−1dt = zΓ (z) .
El primer sumando de la integracion por partes se anula siempre. Esta propiedad es valida ∀z conz 6= 0,−1,−2, · · · .
La segunda de las propiedades (formula de reflexion) se comprueba tambien partiendo de definicionintegral de Euler con el siguiente cambio de variable t = u2.
Γ (z) Γ (1− z) = 2
∫ ∞0
e−u2
u2z−1du 2
∫ ∞0
e−v2
v1−2zdv
= 4
∫∫ ∞0
e−(u2+v2)(uv
)2z−1
dudv ,
si ahora hacemos u = ρ cosϕ y v = ρ senϕ, la integral anterior queda como
Γ (z) Γ (1− z) = 4
∫ ∞0
ρe−ρ2
dρ
∫ π/2
0
cot2z−1(ϕ)dϕ = 4 · 1
2
∫ π/2
0
cot2z−1(ϕ)dϕ .
Finalmente, si
ϕ = arccot(√x); dϕ =
−dx
2√x (1 + x)
,
nos queda
Γ (z) Γ (1− z) =
∫ ∞0
xz−1dx
(1 + x)=
π
sen(πz).
Es inmediato volver a comprobar
Γ
(1
2
)=√π .
Del mismo modo, si utilizamos ademas la relacion de recurrencia encontramos
Γ (z) Γ (−z) =π
−zsen(πz),
357

Borra
dor Pre
limin
ar
10.1. FUNCION GAMMA
La formula de duplicacion, y puede comprobarse partiendo de la definicion del lımite de Euler, ası
22z−1Γ (z) Γ(z + 1
2
)Γ (2z)
=√π .
Hay que hacer notar que en el numerador sustituimos directamente las expresiones para del lımite deEuler y en la del denominador, adicionalmente sustituimos n por 2n
Γ (2z) = lımn→∞
1 · 2 · 3 · · · · · n2z (2z + 1) · · · (2z + n)
n2z = lımn→∞
1 · 2 · 3 · · · · · 2n2z (2z + 1) · · · (2z + 2n)
(2n)2z,
por lo cual se tiene la siguiente expresion dentro del argumento del lımite
22z−1
(1 · 2 · 3 · · · · · n
z (z + 1) (z + 2) · · · (z + n)nz)(
1 · 2 · 3 · · · · · n(z + 1
2
) (z + 3
2
)· · ·(z + 1
2 + n)nz+ 1
2
)(
1 · 2 · 3 · · · · · 2n2z (2z + 1) (2z + 2) · · · (2z + 2n)
(2n)2z
) ,
la cual se reacomoda como
lımn→∞
22z−1 (n!)2
2z (2z + 1) (2z + 2) · · · (2z + 2n)
(2n)! z(z + 1
2
)(z + 1)
(z + 3
2
)(z + 2) · · ·
(z + 1
2 + n)
(z + n)· n
2z+ 12
(2n)2z ,
y
lımn→∞
z(z + 1
2
)(z + 1)
(z + 3
2
)(z + 2) · · ·
(z + n
2
) (2n−1
)z(z + 1
2
)(z + 1)
(z + 3
2
)(z + 2) · · ·
(z + 1
2 + n)
(z + n)· 22z−1 (n!)
2
(2n)!· n
z+ 12
22zn2z.
Entonces22z−1Γ (z) Γ
(z + 1
2
)Γ (2z)
= lımn→∞
(2n−2
)(n!)
2√n
(2n)!,
por lo cual se deduce que el valor de lado izquierdo de la ecuacion es independiente del valor de z por lotanto es el mismo valor para cualquier z y lo evaluamos para z = 1
2
22z−1Γ (z) Γ(z + 1
2
)Γ (2z)
= Γ
(1
2
)=√π ,
con lo cual queda comprobada la formula de duplicacion.Otras propiedades que van quedar como curiosidad y sin demostracion son:
Γ (nz) = (2π)(1−n)/2
nnz−12
n−1∏k=0
(z +
k
n
),(
z
w
)=
z!
w!(z − w)!=
Γ (z + 1)
Γ (w + 1) Γ (z − w + 1).
A partir de Γ (z) se definen otras funciones especiales.
358

Borra
dor Pre
limin
ar
10.2. LA FUNCIONES DIGAMMA Y POLIGAMMA
10.2. La Funciones Digamma y Poligamma
Para evitar tratar con derivadas de los factoriales es costumbre trabajar con sus derivadas logarıtmicas.A partir de la segunda definicion
Γ (z + 1) = z! = lımn→∞
1 · 2 · 3 · · · · · n(z + 1) (z + 2) · · · (z + n)
nz
ln (z!) = ln
(lımn→∞
1 · 2 · 3 · · · · · n(z + 1) (z + 2) · · · (z + n)
nz)
= lımn→∞
[ln (n!) + z ln(n)− ln (z + 1)− ln (z + 2)− · · · − ln (z + n)] ,
ahora derivando
d
dzln (z!) ≡ F(z) = lım
n→∞
[ln(n)− 1
(z + 1)− 1
(z + 2)− · · · − 1
(z + n)
],
y finalmente acomodando, para llegar a la definicion mas conocida
F(z) = −γ −∞∑n=1
(1
(z + n)− 1
n
).
Tambien se le conoce como funcion ψ (Psi)
ψ(z) =Γ′ (z)
Γ (z)=
d
dzln (Γ (z)) ≡ F(z − 1) =
d
dzln ((z − 1)!) ,
con las siguientes propiedades
ψ(z + 1) =1
z+ ψ(z) ,
ψ(z − 1)− ψ(z) = π cot(πz) ,
ψ(z) + ψ
(z +
1
2
)+ 2 ln(2) = 2ψ(2z) ,
.De donde se pueden deducir
ψ(1) = Γ′ (1) = γ .
La funcion ψ(z) puede ser expresada en terminos de integrales definidas, para ello notamos que
Γ′ (z) =
∫ ∞0
e−ttz−1 ln(t) dt ,
y sustituyendo la identidad de Frullani
ln(t) =
∫ ∞0
e−x − e−xt
xdx ,
tendremos
Γ′ (z) =
∫ ∞0
e−ttz−1
∫ ∞0
e−x − e−xt
xdx dt =
∫ ∞0
dx
x
∫ ∞0
(e−x − e−xt
)e−ttz−1dt
=
∫ ∞0
dx
xe−x
∫ ∞0
e−ttz−1dt−∫ ∞
0
dx
x
∫ ∞0
e−t(x+1)tz−1dt = Γ (z)
∫ ∞0
dx
x
[e−x − (x+ 1)
−z],
359

Borra
dor Pre
limin
ar
10.3. LA APROXIMACION DE STIRLING
ya que Γ (z) = kz∫∞
0e−kttz−1dt y por lo tanto
ψ(z) =
∫ ∞0
dx
x
[e−x − (x+ 1)
−z].
Tambien daremos (sin demostracion) otras expresiones
ψ(z) =
∫ ∞0
(e−t
t− e−tz
1− e−t
)dt ,
ψ(z) = −γ +
∫ 1
0
1− xz−1
1− xdx .
La Funcion Poligamma se obtiene derivando en forma repetida la Funcion Digamma
ψ(m)(z + 1) = F(m)(z) =dm
dzmF(z) = (−1)m+1m!
∞∑n=1
1
(z + n)m+1 m = 1, 2, 3 · · ·
y cuya serie puede ser expresada en terminos de la funcion Zeta de Riemman
ζ(m) ≡∞∑n=1
1
nm,
comoF(m)(0) = (−1)m+1m!ζ(m+ 1) ,
de esta forma es posible desarrollar en serie de Maclaurin
ln(n!) = −γ +z2
2ζ(2)− z3
3ζ(3) + · · ·+ (−1)
n zn
nζ(n) + · · · .
10.3. La aproximacion de Stirling
El comportamiento asintotico de las funciones especiales sera tratado en una clase aparte. Pero la impor-tancia de la Aproximacion de Stirling obliga a que se trate en este punto.
Supongamos que consideramos el caso z ≡ x ∈ <. Por lo cual estamos interesados en el caso x� 1.Partimos de
Γ (x) =1
xΓ (x+ 1) =
1
x
∫ ∞0
e−ttxdt =1
x
∫ ∞0
e−t+x ln tdt ,
haciendo t = xu tenemos que
Γ (x) = xx∫ ∞
0
e−x(u−ln(u))du .
Ahora bien, el integrando tendra su maximo en u = 1 donde la exponencial tiene su mınimo y es entornoa ese punto que desarrollara en series de Taylor
u− ln(u) = 1 +1
2(u− 1)
2 − 1
3(u− 1)
3+
1
4(u− 1)
4+ · · ·
por lo cual
Γ (x) = xx∫ ∞
0
e−x(u−ln(u))du ≈ xx∫ ∞
0
du e−x(1+ 12 (u−1)2− 1
3 (u−1)3+··· )du .
360

Borra
dor Pre
limin
ar
10.4. LA FUNCION BETA
Otro cambio de variable v =√x (u− 1) nos lleva
Γ (x) ≈ xxe−x√x
∫ ∞−√x
dve−12v
2
exp
(1
3√xv3 − 1
4xv4 +
1
5x32
v5 − · · ·).
Para valores x� 1 se expande, en series de Taylor los exponenciales que contengan terminos 1√x
Γ (x) ≈ xxe−x√x
∫ ∞−∞
dve−12 v
2
{1 +
(1
3√xv3 − 1
4xv4 +
1
5x32
v5 − · · ·)
+
+1
2!
(1
3√xv3 − 1
4xv4 +
1
5x32
v5 − · · ·)2
+
+1
3!
(1
3√xv3 − 1
4xv4 +
1
5x32
v5 − · · ·)3
+ · · ·
}.
Finalmente, utilizando que
∫ ∞−∞
dve−12 v
2
vn =
√
2π√2π · 1 · 3 · 5 · · · · (n− 1)
0
n = 0n = 2kn = 2k − 1
e integrando termino a termino, tendremos que
Γ (x) ≈√
2π
xxxe−x
{1 +
1
12x+
1
288 x2+ · · ·
}.
10.4. La funcion Beta
B(x, y) =
∫ 1
0
tx−1 (1− t)y−1dt Rex > 0 ∧ Re y > 0
B(x, y) =Γ (x) Γ (y)
Γ (x+ y)
10.5. La funcion integral de probabilidad
La funcion Integral de probabilidad para una variable compleja arbitraria z como
Φ(z) =2√π
∫ z
0
e−t2
dt .
Obviamente Φ(0) = 0 y Φ(∞) = 1.A partir de esta funcion se define la Funcion Error y su complemento
erf(z) =
∫ z
0
e−t2
dt =
√π
2Φ(z) ,
erfc(z) =
∫ z
z
e−t2
dt =
√π
2[1− Φ(z) .]
361

Borra
dor Pre
limin
ar
10.5. LA FUNCION INTEGRAL DE PROBABILIDAD
La funcion Gamma incompleta γ (z, α) y la funcion Gamma complementaria Γ (z, α)
γ (z, α) =
∫ α
0
e−ttz−1dt ,
Γ (z, α) =
∫ ∞α
e−ttz−1dt ,
las cuales claramente cumplen conγ (z, α) + Γ (z, α) = Γ (z) ,
y en resumen
γ (z + 1, α) = zγ (z, α)− αze−α
Γ (z + 1, α) = zΓ (z, α) + αze−α .
10.5.1. Ejemplos
10.5.2. Practicando con Maxima
10.5.3. Ejercicios
362

Borra
dor Pre
limin
arCapıtulo 11El problema de Sturm-Liuoville
363

Borra
dor Pre
limin
ar
11.1. EL PROBLEMA DE STURM-LIUOVILLE
11.1. El problema de Sturm-Liuoville
11.1.1. Calculo Operacional
Toda ecuacion diferencial puede ser descrita de la siguiente forma
d
dxF (x) = f(x) ⇒ DF (x) = f(x) , (11.1)
donde D (•) es un operador diferencial lineal, tal y como los estudiamos en su momento. De esta forma
D (Axn +Bxm) = AD (xn) +BD (xm) = nAxn−1 +mBxm−1 , (11.2)
y en muchos aspectos ese operador diferencial D (•) puede ser tratado como un numero mas.De esta forma una ecuacion diferencial homogenea puede ser descrita en forma de operadores como
a y′′ + b y′ + c y = 0 ⇒ O |y〉 = 0 ⇔(a D2 + b D + c
)|y〉 = 0 , (11.3)
y consecuentemente
(D− r1) (D− r2) |y〉 = 0 con r1 y r1 raices de a r2 + b r + c = 0 , (11.4)
con soluciones, como era de esperarse de la forma
r1 = r2 = r reales ⇒ y(x) = (A+Bx) er x
r1 6= r2 reales ⇒ y(x) = A er1 x +B er2 x
r1 = r∗2 complejas r1 = α+ i β ⇒ y(x) = eαx (A cos(β x) +B sen(β x))(11.5)
Esta notacion tambien se presta para algunas curiosidades. Para una ecuacion diferencial generica concoeficientes constantes se tiene
y′′ − 3 y′ + 2 y = x2 ⇒(D2 − 3D + 2
)y = x2 ⇒ (D− 1) (D− 2) y = x2 . (11.6)
mas aun
y =x2
(D− 1) (D− 2)⇒ y =
x2
(D− 2)− x2
(D− 1), (11.7)
por lo cual expandiendo1
D− 1=−1
1− D= −1− D− D2 − D3 − D4 − · · · (11.8)
1
D− 2=−1
2
1
1− D2
= −1
2− D
4− D2
8− D3
16− · · · (11.9)
de donde
y =
(−1
2− D
4− D2
8− D3
16− · · ·
)x2 −
(−1− D− D2 − D3 − D4 − · · ·
)x2 , (11.10)
por lo tanto tendremos la solucion particular de la ecuacion y′′ − 3 y′ + 2 y = x2
y =
(−x
2
2− x
2− 1
4
)−(−x2 − 2x− 2
)=x2
2+
3
2x+
7
4. (11.11)
364

Borra
dor Pre
limin
ar
11.1. EL PROBLEMA DE STURM-LIUOVILLE
Las operaciones que se usaron arriba estan relacionadas muy estrechamente con las propiedades de laintegral ∫ ∞
0
e−stf(t)dt . (11.12)
En el mismo espıritu anterior podemos asociar una ecuacion diferencial de segundo orden a un operadordiferencial(
P (x)d2
dx2+Q(x)
d
dx+R(x)
)︸ ︷︷ ︸
L
u(x) = 0 ⇒(P (x)D2 +Q(x)D +R(x)
)|u〉 = 0 ⇔ L |u〉 = 0 . (11.13)
Donde las funciones P (x), Q(x) y R(x) son funciones reales, definidas en el intervalo [a, b] y que cumplencon las siguientes exigencias
P ′′(x), Q′(x) y R(x) existen y son contınuas en [a, b], y
P (x) no contiene ceros en (a, b).
11.1.2. Operadores diferenciales de segundo orden
Consideremos el espacio de Hilbert de funciones continuas en [a, b], en el cual representaremos a esasfunciones como |u〉 y los operadores lineales actuan en ese espacio de Hilbert de la forma acostumbradaL |u〉 = |u〉. Entonces, a traves de la definicion del producto interno podemos construir
〈v |u〉 = 〈u |v〉∗ ⇔ 〈v|L |u〉 = 〈u|L† |v〉∗ . (11.14)
Sabemos que, los operadores hermıticos (o autoadjuntos: L = L†) tendran autovalores {λ1, λ2, λ3, · · · , λn}reales y los correspondientes autovectores {|w1〉 , |w2〉 , |w3〉 , · · · , |wn〉} seran ortogonales,
⟨wi |wj〉 ∝ δij .
El hecho que construyamos una ecuacion de autovalores con L de la forma expresada en (11.13) implicauna ecuacion de la forma
L |vi〉 = λi |vi〉 ⇔(P (x)D2 +Q(x)D +R(x)
)|vi〉 = λi |vi〉 . (11.15)
Con lo cual estarıamos resolviendo una familia de ecuaciones diferenciales homogeneas del tipo
P (x)d2yi(x)
dx2+Q(x)
dyi(x)
dx+ (R(x)− λi) yi(x) = 0 , (11.16)
parametrizadas por el parametro λi. Mas aun, con esta estrategia podremos integrar ecuaciones diferencialesde la forma
P (x)d2yi(x)
dx2+Q(x)
dyi(x)
dx+ (R(x)− λiw(x)) yi(x) = 0 , (11.17)
si consideramos productos internos generalizados con funciones peso w(x) de la forma
〈g |f〉 =
∫ b
a
dx w(x) g∗(x)f(x) . (11.18)
Varios son los ejemplos de esta forma general de abordar las ecuaciones diferenciales como un problemade autovalores. Entre ellos podemos mencionar:
365

Borra
dor Pre
limin
ar
11.1. EL PROBLEMA DE STURM-LIUOVILLE
El oscilador armonico: (d2
dx2
)︸ ︷︷ ︸
L
y(x) = −ω2y(x) . (11.19)
La ecuacion de Legendre:((1− x2)
d2
dx2− 2x
d
dx
)︸ ︷︷ ︸
L
Pn(x) = −n(n+ 1) Pn(x) . (11.20)
En general toda las familias de polinomios ortogonales, pn(x) con producto interno definido como
〈pm |pn〉 =
∫ b
a
w(x)pm(x)pn(x)dx = hnδmn ,
con w(x) > 0 una funcion peso en a ≤ x ≤ b.Esto es: (
P (x)d2
dx2+Q(x)
d
dx
)︸ ︷︷ ︸
L
pn(x) = −αnpn(x) = 0 . (11.21)
Donde las expresiones para P (x), Q(x) y αn se encuentran especificadas en la Tabla (11.1)
Polinomio P (x) Q(x) αn
Pn 1− x2 −2x n(n+ 1)Tn 1− x2 −x n2
Un 1− x2 −2x n(n+ 1)Hn 1 −2x 2nLn x 1− x nLαn x 1− x+ α nPαβn 1− x2 β − α− x(2 + α+ β) n(n+ α+ β + 1)
Cuadro 11.1: Funciones para determinar la ecuacion diferencial para la cual son solucion los polinomiosortogonales. Con Pn Legendre, Tn Tchebychev 1E; Un Tchebychev 2E; Hn Hermite; Ln Laguerre; Lαn(x)Laguerre G; Pαβn (x) Jacobi
La ecuacion de Bessel (x2 d2
dx2+ x
d
dx+ x2
)︸ ︷︷ ︸
L
Jk(x) = k2Jk(x); k ∈ R . (11.22)
11.1.3. Operadores diferenciales autoadjuntos
Es claro que las funciones P (x), Q(x) y R(x) tendran algunas restricciones adicionales a las expresadasarriba, de tal forma que se garantice que el operador L sea autoadjunto (hermıtico).
366

Borra
dor Pre
limin
ar
11.1. EL PROBLEMA DE STURM-LIUOVILLE
Para encontrar esas restricciones a los coeficientes, partimos de la definicion de producto interno enun espacio de funciones. En general, vimos que, para un espacio de funciones continuas y continuamentediferenciales en [a, b] una posible definicion de producto interno es
〈g |f〉 =
∫ b
a
dx g∗(x)f(x) ⇒ 〈g|L |f〉 =
∫ b
a
dx g∗(x) Lf(x) , (11.23)
es decir
〈g|L |f〉 =
∫ b
a
dx g∗(x)P (x)d2f(x)
dx2+
∫ b
a
dx g∗(x)Q(x)df(x)
dx+
∫ b
a
dx g∗(x)R(x)f(x) . (11.24)
Integrando por partes la primera y segunda integral tendremos∫ b
a
dx g∗(x)P (x)d2f(x)
dx2=
(P (x) g∗(x)
df(x)
dx− f(x)
d(P (x) g∗(x))
dx
)∣∣∣∣ba
+
∫ b
a
dx f(x)d2(P (x) g∗(x))
dx2,
(11.25)y ∫ b
a
dx g∗(x)Q(x)df(x)
dx= f(x)Q(x) g∗(x)|ba −
∫ b
a
dx f(x)d(Q(x) g∗(x))
dx. (11.26)
Con lo cual podremos escribir:
〈g|L |f〉 =
∫ b
a
dxf(x)
(P (x)
d2
dx2+
(2
dP (x)
dx−Q(x)
)d
dx+
(R(x)− dQ(x)
dx+
d2P (x)
dx2
))︸ ︷︷ ︸
L†
g∗(x)
+
(f(x)
(Q(x)− dP (x)
dx
)g∗(x) + P (x)
(df(x)
dxg∗(x)− dg∗(x)
dxf(x)
))∣∣∣∣ba
, (11.27)
donde hemos identificado por L† al operador adjunto de L. Ahora bien, si queremos que L sea autoadjunto(o hermıtico ) L = L†, entonces se debe cumplir que
2dP (x)
dx−Q(x) = Q(x) y − dQ(x)
dx+
d2P (x)
dx2= 0 , (11.28)
y ambas se satisfacen identicamente si
Q(x) =dP (x)
dx. (11.29)
Estas restricciones sobre P (x) y Q(x) son aparentes, porque siempre podremos construir un operadordiferencial autoadjunto a partir de cualquier operador diferencial de segundo orden. En efecto, como P (x)unicamente puede tener raıces en los extremos del intervalo [a, b], siempre podremos definir
h(x) =1
P (x)exp
(∫ b
a
dxQ(x)
P (x)
)⇒
P (x) = h(x)P (x)
Q(x) = h(x)Q(x)(11.30)
con lo cual se cumple inmediatamente la condicion (11.29), a saber
dP (x)
dx=
d
dxexp
(∫ b
a
dxQ(x)
P (x)
)=Q(x)
P (x)exp
(∫ b
a
dxQ(x)
P (x)
)= Q(x) , (11.31)
367

Borra
dor Pre
limin
ar
11.1. EL PROBLEMA DE STURM-LIUOVILLE
y entonces h(x)L siempre sera auto adjunto.Entonces, al utilizar (11.29) en (11.13) es facil convencerse que todo operador autoadjunto puede ser
escrito como
L↔ d
dx
(P (x)
d(•)dx
)+R(x) . (11.32)
Adicionalmente, la ecuacion general (11.27) quedarıa escrita como:
〈g|L |f〉 =
∫ b
a
dx f(x)L†g∗(x)︸ ︷︷ ︸〈f |L†|g〉∗
+ P (x)
(df(x)
dxg∗(x)− dg∗(x)
dxf(x)
)∣∣∣∣ba
. (11.33)
Claramente, si L es autoadjunto y f(x) y g(x) son soluciones de una ecuacion diferencial autoadjunta,el segundo termino se debe anular, y allı habran de incidir las condiciones de borde que se impongan alproblema.
11.1.4. El Sistema Sturm-Liouville
Evidentemente, si consideramos que f(x) y g(x) son soluciones de una ecuacion diferencial autoadjunta(que puede ser representada por un operador lineal de segundo orden autoadjunto L), entonces la ecuacionde autovalores
L |ui〉 = −λi |ui〉 ⇔(
d
dx
(P (x)
d
dx
)+R(x)
)ui(x) = −λi w(x)ui(x) , (11.34)
donde, λi son los autovalores, ui(x) las autofunciones soluciones y w(x) > 0 es la funcion peso descrita en(11.18). Claramente esta ecuacion (11.34) debe ser complementada con las condiciones de frontera
P (x)u∗j (x)dui(x)
dx
∣∣∣∣ba
= 0 ∀ i, j . (11.35)
Las ecuaciones (11.34) y (11.35) constituyen el Sistema Sturm-Liouville y tambien se le refiere como elproblema de Sturm-Liouville.
Se distinguen tres posibles situaciones con las condiciones de frontera:
1. Condiciones Regulares: Para este caso se especifican los valores de una combinacion de las funcionesy las derivadas:
β1 ui(x) + γ1dui(x)
dx= C1 y β2 ui(x) + γ2
dui(x)
dx= C2 ,
en los extremos x = a y x = b.
Estos valores son finitos en todo el intervalo de validez de las funciones. Claramente de esta puedenderivarse cuatro tipos de condiciones de frontera
a) Condiciones Regulares Puras: Para este caso se especifican los valores para la combinacionlineal completa, con β1 6= 0, β2 6= 0, γ1 6= 0 y γ2 6= 0.
b) Condiciones de Dirichlet: Para este caso se especifican los valores de la funcion ui(x) en losextremos, x = a y x = b. Esto es para γ1 = γ2 = 0.
c) Condiciones de Neumann: Para este caso se especifican los valores de las derivadas dui(x)dx en
los extremos, x = a y x = b. Esto es para β1 = β2 = 0.
368

Borra
dor Pre
limin
ar
11.1. EL PROBLEMA DE STURM-LIUOVILLE
d) Condiciones Mixtas: Cuando se especifican los valores de un tipo de condiciones de frontera enun extremo y otro en el otro. Esto es para β1 = γ2 = 0 o γ1 = β2 = 0.
2. Condiciones Periodicas: Para este caso el valor de la funcion y su derivada es el mismo en los
extremos ui(a) = ui(b) y dui(x)dx
∣∣∣a
= dui(x)dx
∣∣∣b. Otra vez, estos valores son finitos en todo el intervalo de
validez de las funciones.
3. Condiciones Singulares: Para este caso encontramos valores singulares para las funciones y susderivadas.
Veamos algunos ejemplos ilustrativos. Vamos a analizar el caso muy simple de la ecuacion diferencial tipooscilador armonico libre. Esto es:
d2y(x)
dx2+ λy(x) = 0 , (11.36)
y veremos como cambia cuando se tienen en cuenta distintos tipos de condiciones de frontera.
Condicion Regular con
y(0) = 0 ∧ dy(x)
dx
∣∣∣∣x=π
= 0 .
Este caso corresponde una condicion de frontera regular con γ1 = β2 = 0 y, en principio, tendrasoluciones distintas para λ > 0, λ = 0, y λ < 0
λ = 0 La solucion sera de la forma y(x) = C1x + C2 como y(0) = 0 tendremos que C2 = 0 y comody(x)
dx
∣∣∣x=π
= 0 necesariamente C1 = 0. Con lo cual la unica solucion es y(x) = 0 y λ no sera un
autovalor de la ecuacion (11.36).
λ < 0 Podemos re-escribirla con λ = −µ2. Entonces la solucion general para (11.36) tendra la formay(x) = C1eµx + C2e−µx.
Las condiciones de frontera imponen
0 = C1 + C2 ∧ 0 = µ(C1eµπ +−C2e−µπ
),
y otra vez, tendremos como unica solucion 0 = C1 = C2 y λ no sera un autovalor de la ecuacion(11.36).
λ > 0 Para este caso usamos λ = µ2 y la solucion sera del tipo y(x) = C1 cos(µx) + C2 sen(µx). Lascondiciones de frontera imponen: y(0) = 0 ⇒ C1 = 0 y
dy(x)
dx
∣∣∣∣x=π
= C2µ cos(µπ) = 0 ⇒ µn = ±2n+ 1
2⇒ λn =
(2n+ 1)2
4para n = 0, 1, 2, 3, · · ·
Es decir, tendremos infinitos auto valores asociados con infinitas autofunciones yi(x) = sen(
2n+12 x
)para n = 0, 1, 2, 3, · · · .En primer lugar, es importante senalar que, por ser L un operador hermıtico sus autovalores sonreales y cumplen λ0 < λ1 < λ2 < λ3 · · · , es decir, son crecientes para ındices crecientes de lasautofunciones. En segundo lugar que las infinitas autofunciones forman una base ortogonal y, porlo tanto la suma de todas esas soluciones, tambien sera solucion de (11.36), con las condiciones
de frontera: y(0) = 0 ∧ dy(x)dx
∣∣∣x=π
= 0 y λ > 0 puede ser escrita como
y(x) =
∞∑n=0
sen
(2n+ 1
2x
). (11.37)
369

Borra
dor Pre
limin
ar
11.1. EL PROBLEMA DE STURM-LIUOVILLE
y3 = �tanh(µ)
y1 = µ
y2 = �µ
µ ⇡ �0.9962
Figura 11.1: Las posibles soluciones µ = − tanh(µπ), tanto para µ > 0 como para µ > 0 para el intervalo[0, 2] se muestra claramente en la figura. Para µ > 0 no existe solucion, pero para µ < 0, se encuentranumericamente que µ ≈ −0,9962
Esta hecho nos permitira resolver el problema inhomogeneo, L |u〉 = |f〉, y sera analizado endetalle mas adelante.
Condicion Regular con
y(0) = 0 ∧ y(π) +dy(x)
dx
∣∣∣∣x=π
= 0 .
Para este caso tendremos una condicion de frontera regular con γ1 = 0 y, en principio, tendra solucionesdistintas para λ > 0, λ = 0, y λ < 0.
λ = 0 Se cumplen las mismas situaciones que el caso anterior y se demuestra que solo es posible lasolucion trivial y(x) = 0.
λ < 0 Una vez mas hacemos λ = −µ2 y la solucion general tendra la forma y(x) = C1eµx + C2e−µx.Las condiciones de frontera imponen:
C1 = −C2 ∧ 0 =(C1eµπ + C2e−µπ
)+ µ
(C1eµπ − C2e−µπ
),
con lo cual
µ = − (eµπ − e−µπ)
(eµπ + e−µπ)≡ − tanh(µπ) .
Esta ecuacion trascendente se tiene que resolver numericamente. Si µ > 0 no existira solucion paraµ = − tanh(µπ). Esto se ilustra claramente en la figura 11.1. No hay punto de corte entre las dosfunciones. Por lo tanto volvemos al caso de la solucion trivial y(x) = 0. Si µ < 0 entonces, al resol-ver numericamente, encontramos que µ ≈ −0,9962, con lo cual λ ≈ −0,9924 y consecuentementey(x) ≈ C1
(e−0,9962 x − e0,9962 x
).
λ > 0 En este caso una vez mas hacemos λ = µ2 y la solucion sera del tipo y(x) = C1 cos(µx) +C2 sen(µx). Las condiciones de frontera imponen: y(0) = 0 ⇒ C1 = 0 y, para este caso
y(π) = 0 = C2 (sen(µπ) + µ cos(µπ)) ⇒ µ = − tan(µπ) .
Otra vez, la ecuacion trascendente µ = − tan(µπ), se tiene que resolver numericamente. Noobstante, procedemos a analizar una posible representacion grafica que se muestra en la Figura
370

Borra
dor Pre
limin
ar
11.1. EL PROBLEMA DE STURM-LIUOVILLE
y2 = �µ
y1 = µ
y3 = � tan(µ⇡)
Figura 11.2: Las posibles soluciones de µ = − tan(µπ), tanto para µ > 0 como para µ > 0 para el intervalo[0, 4] se muestra claramente en la figura. Tanto para µ > 0 como para µ < 0 existen infinitas soluciones.
11.2. Claramente, tanto para µ > 0 como para µ < 0 existen infinitas soluciones. Si resolvemosnumericamente para el caso µ > 0 encontramos que:
µ1 ≈ 0,7876, µ2 ≈ 1,6716, µ3 ≈ 2,6162 · · · ⇒ λ1 ≈ 0,6204, λ2 ≈ 2,7943, λ3 ≈ 6,8446 · · ·
Del mimo modo, para µ < 0 se obtiene:
µ1 ≈ −1,2901, µ2 ≈ −2,3731, µ3 ≈ −3,4092 · · · ⇒ λ1 ≈ 1,6644, λ2 ≈ 5,6314, λ3 ≈ 11,6225 · · ·
Por lo tanto la solucion, se podra escribir,
y(x) =
∞∑n=0
sen (µnx)− sen (|µn|x) . (11.38)
Condiciones Periodicas
Paras las condiciones de frontera periodicas tendremos: y(0) = y(L) y dy(x)dx
∣∣∣x=0
= dy(x)dx
∣∣∣x=L
.
Una vez mas se distinguen tres escenarios.
λ = 0 En este caso, la solucion vuelve a ser y(x) = C1x+ C2 y las condiciones de frontera imponen
y(0) = y(L) ⇒ C2 = C1L+ C2 ⇒ C1 = 0dy(x)
dx
∣∣∣∣x=0
=dy(x)
dx
∣∣∣∣x=L
⇒ C2 = C2 .
Por lo tanto, para λ = 0, la solucion (11.36) con condiciones de borde periodicas, sera y(x) = C2
λ < 0 Una vez mas, λ = −µ2 y la solucion general tendra la forma y(x) = C1eµx + C2e−µx. Lascondiciones de frontera imponen
y(0) = y(L) ⇒ C1
(1− eµL
)= C2
(e−µL − 1
),
ydy(x)
dx
∣∣∣∣x=0
=dy(x)
dx
∣∣∣∣x=L
⇒ C1
(1− eµL
)= −C2
(e−µL − 1
).
Por lo tanto, C1 = C2 = 0, y obtenemos la solucion trivial y(x) = 0 para valores de λ < 0.
371

Borra
dor Pre
limin
ar
11.1. EL PROBLEMA DE STURM-LIUOVILLE
λ > 0 Al igual que en lo casos anteriores hacemos λ = µ2 y la solucion sera del tipo y(x) = C1 cos(µx)+C2 sen(µx). Las condiciones de frontera imponen:
y(0) = y(L) ⇒ C1 (1− cos(µL)) = C2 sen(µL) ,
ydy(x)
dx
∣∣∣∣x=0
=dy(x)
dx
∣∣∣∣x=L
⇒ C2 (1− cos(µL)) = −C1 sen(µL) ,
con lo cual, al resolver para C2 se obtiene
2C1 (1− cos(µL)) = 0 ⇒ cos(µL) = 1 ⇒ µn = ±2nπ
L⇒ λn =
(2nπ
L
)2
para n = 0, 1, 2, 3 · · ·
por lo cual, para cada autovalor λn tendremos asociadas dos autofunciones: y1(x) = cos(
2nπL x
)y
y2(x) = sen(2nπL x).
Condiciones Singular
Aquı se presentan uno o mas infinitos en el intervalo de validez x ∈ [a, b]. En esta seccion analizaremosunicamente el caso para el cual los puntos singulares esten en los extremos x = a y x = b. En este caso,la ecuacion (11.34), vale decir
L |ui〉 = −λiw(x) |ui〉 ⇔d
dx
(P (x)
dui(x)
dx
)+ (R(x) + λi w(x))ui(x) = 0 , (11.39)
tendremos P (a) = 0 o P (b) = 0 o ambos. La aparicion de polos en el intervalo de validez de lasecuaciones diferenciales fue lo que motivo el uso del metodo de Frobenius que se discutio en la seccion9.3. Particularmente, la ecuacion de Bessel (9.16) en la seccion 9.4 representa este caso. Tal y comodiscutimos en esas secciones, si incluimos x = 0 en el intervalo de validez de la ecuacion esta presentaun polo en uno de los extremos del intervalo. Es decir, en la ecuacion de Bessel escrita en formaautoadjunta:
x2y′′ + xy′ +(k2x2 − n2
)y = 0 ⇔ d
dx
(x
dy(x)
dx
)+
(k2x− n2
x
)y(x) = 0 , (11.40)
identificamos: P (x) = x, R(x) = −n2
x , λ = k2 y finalmente w(x) = x. Tal y como mostramos en (9.4)la solucion general de esta ecuacion es:
y(x) = C1 Jn(k x) + C2 Yn(k x) con y(a = 0) = 0 ⇒ C2 = 0 ⇒ y(x) = C1 Jn(k x) . (11.41)
La condicion de borde y(a = 0) = 0 impone que C2 = 0 porque Yn(k x→ 0)→∞.
Si adicionalmente, imponemos y(b) = 0, entonces se cumplira que Jn(k a) = 0 por lo cual k a = rJ n ν ,donde rJ n ν con ν = 1, 2, 3, · · · son las raıces de las funcion de Bessel Jn(x), tal y como se expresan enla Tabla 9.1. Entonces, al igual que en los casos anteriores tendremos
kn =rJ n νa
⇒ λn =r2J n ν
a2⇒ yν(x) = C1 Jn
(rJ n νa
x). (11.42)
De esta forma se tendran las funciones asociadas con los autovalores y los ceros de la funcion de Besselreescalaran el argumento de la funcion.
372

Borra
dor Pre
limin
ar
11.1. EL PROBLEMA DE STURM-LIUOVILLE
11.1.5. Funcion de Green
Consideremos ahora la solucion de caso inhomogeneo
L |y〉 = |f〉 ⇔ d
dx
(P (x)
dy(x)
dx
)+R(x)y(x) = f(x) . (11.43)
Claramente
L |ui〉 = −λi |ui〉 ⇒ |y〉 =
∞∑i=0
Ci |ui〉 , (11.44)
donde {|ui〉} son las autofunciones de L. Por lo tanto podemos expresar (11.43) de la forma
|f〉 = L |y〉 ⇒ |f〉 = L
( ∞∑i=0
Ci |ui〉
)=
∞∑i=0
CiL |ui〉 = −∞∑i=0
Ciλi |ui〉 , (11.45)
para finalmente proyectar (11.43) a lo largo de las mismas autofunciones |ui〉 y dado que las funciones {|ui〉}son ortogonales, obtenemos los coeficientes Ci
⟨uj |f〉 = −
∞∑i=0
Ciλi⟨uj |ui〉︸ ︷︷ ︸δi j
⇒ Cj =1
λj
⟨uj |f〉〈uj |uj〉
⇔ Cj =
∫ ba
dx u∗j (x)w(x)f(x)∫ ba
dx u∗j (x)w(x)uj(x). (11.46)
Por lo tanto,
|y〉 =
∞∑i=0
(1
λi
⟨ui |f〉〈ui |ui〉
)|ui〉 ⇔ y(x) =
∞∑i=0
1
λi
( ∫ ba
dξ u∗i (ξ)w(ξ)f(ξ)∫ ba
dζ u∗i (ζ)w(ζ)ui(ζ)
)ui(x) . (11.47)
Siempre se puede normalizar las autofunciones y con ello se simplifica la expresion anterior
⟨ui |ui〉 = 1 ⇔
∫ b
a
dζ u∗i (ζ)w(ζ)ui(ζ) = 1 ⇒ y(x) =
∞∑i=0
1
λi
(∫ b
a
dξ u∗i (ξ)w(ξ)f(ξ)
)ui(x) , (11.48)
donde
|ui〉 =|ui〉√〈ui |ui〉
⇔ ui(x) =ui√∫ b
adζ u∗i (ζ)w(ζ)ui(ζ)
. (11.49)
De este modo, tendremos
y(x) =
∞∑i=0
1
λi
(∫ b
a
dξ u∗i (ξ)w(ξ)f(ξ)
)ui(x) =
∫ b
a
dξ
( ∞∑i=0
1
λiu∗i (ξ)ui(x)
)︸ ︷︷ ︸
G(x,ξ)
w(ξ)f(ξ) . (11.50)
Por lo tanto, la solucion al problema de Sturm-Liouville se puede expresar en terminos de la funcion deGreen como
y(x) =
∫ b
a
dξ G(ξ, x)w(ξ)f(ξ) , con: G(ξ, x) =
∞∑i=0
1
λiu∗i (ξ)ui(x) . (11.51)
Para ejemplificar esta tecnica, consideremos la ecuacion diferencial del oscilador armonico forzado
x(t) + ω2x(t) = cos(ω t) , con: x(0) = x(π) = 0 donde x ≡ d2x(t)
dt2. (11.52)
373

Borra
dor Pre
limin
ar
11.1. EL PROBLEMA DE STURM-LIUOVILLE
Resolvemos primero el problema de autovalores
x(t) + ω2x(t) = λx(t) ⇒ x(t) = A cos(t√ω2 − λ
)+B sen
(t√ω2 − λ
)(11.53)
Las condiciones de frontera imponen
x(0) = 0 ⇒ A = 0 y x(π) = 0 ⇒ sen(π√ω2 − λ
)= 0 ⇒
√ω2 − λ = n con n = 0,±1,±2, · · ·
(11.54)Las autofunciones tendran la forma de xn(t) = Ansen(nt). Al normalizarlas tendremos
xn(t) =
(2
π
)1/2
sen(nt) .
De este modo la funcion de Green y la solucion quedan como:
G(τ, t) =2
π
∞∑n=0
sen(nτ) sen(nt)
ω2 − n2⇒ x(t) =
2
π
∫ π
0
dτ
( ∞∑n=0
sen(nτ) sen(nt)
ω2 − n2
)cos(ω τ) , (11.55)
con lo cual
x(t) =2
π
∞∑n=0
sen(nt)
ω2 − n2
∫ π
0
dτ sen(nτ) cos(ω τ) ⇒ x(t) =2
π
(ω (1± cos(ωπ))
ω2 − ω2 + λ
) ∞∑n=0
sen(nt)
ω2 − n2, (11.56)
la cual constituye la solucion mas general para la ecuacion del oscilador armonico forzado (11.52).Inspirados en el nuestra motivacion inicial, (11.43), podemos extenderla para considerar las siguientes
ecuaciones diferenciales
(L + λ) |y〉 = |f〉 ⇔ d
dx
(P (x)
dy(x)
dx
)+ (R(x) + λw(x)) y(x) = f(x) , (11.57)
donde y(x) estara sometida a algunas de las condiciones de frontera expresadas en 11.1.4. Una vez masresolvemos el problema de autovalores para encontrar las autofunciones en las cuales expandiremos todas lasfunciones involucradas en el problema. Esto es, en general y siguiendo el esquema presentado en (11.44)
L |ui〉 = −λi |ui〉 ⇒ |f〉 =
∞∑i=0
F i |ui〉 ≡∞∑i=0
⟨ui |f〉 |ui〉 , (11.58)
donde hemos supuesto que las autofunciones fueron normalizadas,⟨uj |ui〉 = δji . Con lo cual
(L + λ) |y〉 = |f〉 ⇒ (L + λ)
( ∞∑i=0
Ci |ui〉
)=
∞∑i=0
⟨ui |f〉 |ui〉 ⇒ Ci (λi + λ)−
⟨ui |f〉 = 0 , (11.59)
y se sigue que
Ci =
⟨ui |f〉
(λi + λ)⇒ |y〉 =
∞∑i=0
( ⟨ui |f〉
(λi + λ)
)|ui〉 ⇔ y(x) =
∞∑i=0
(∫ ba
dξ u∗i (ξ)w(ξ)f(ξ)
λi + λ
)ui(x) , (11.60)
intercambiando sumatorias e integrales tendremos
y(x) =
∫ b
a
dξ w(ξ)f(ξ)
∞∑i=0
u∗i (ξ)ui(x)
λi + λ⇒ G(ξ, x) =
∞∑i=0
u∗i (ξ)ui(x)
λi + λ. (11.61)
Podemos identificar claramente la funcion de Green. Notese que para el caso λi + λ = 0, es decir si λen (11.57) coincide con alguno de los autovalores del operador L, la funcion de Green se hace infinita y esteesquema presenta dificultades para su aplicacion.
374

Borra
dor Pre
limin
ar
11.1. EL PROBLEMA DE STURM-LIUOVILLE
11.1.6. Ejemplos
11.1.7. Practicando con Maxima
11.1.8. Ejercicios
375
Borra
dor Pre
limin
arCapıtulo 12Apendice
376

Borra
dor Pre
limin
ar
12.1. INTRODUCCION A LOS CAS
12.1. Introduccion a los CAS
Los sistemas algebraicos computacionales o sistemas de algebra computacional (CAS: Computer AlgebraSystem) son sistemas o calculadoras avanzadas, que permiten realizar operaciones de manera simbolica. Estosignifica que el computador puede efectuar operaciones con ecuaciones y formulas simbolicamente, es decir,a+ b = c se interpreta como la suma de variables y no como la suma de numeros previamente asignados.
Estos sistemas permiten operar de manera exacta con sımbolos que representan objetos matematicostales como:
Numeros (Enteros, racionales, reales, complejos...)
Polinomios, Funciones Racionales, Sistemas de Ecuaciones.
Grupos, Anillos, Algebras . . .
A diferencia de los sistemas tradicionales de computacion numerica:
FORTRAN, Basic, C, C++, Java => Precision fija (Punto Flotante)
Otra caracterıstica principal radica en el hecho de que son interactivos (interpretados o ejecutados al momentode proveer una instruccion), es decir, trabajan de la forma:
Input : solve(problema);
Output : respuesta
Los CAS se pueden clasificar en dos grandes grupos:1
Sistemas de Proposito Especial (Creados para hacer calculos en un area especıfica): FORM, GAP,CAMAL, SHEEP, STENSOR, LiE, KANT.
Sistemas de Proposito General (¡Especies de navajas suizas!): Axiom, Derive, Reduce, Maple, MatLab,Mathematica, Maxima, MuPAD. Recientemente, lenguajes como Python comienzan a incorporar bi-bliotecas que permiten generar formas de calculo simbolico2 que ofrecen una perspectiva interesantepara integrar ambientes algebraicos-numericos-visuales.
Los CAS modernos de proposito general son ambientes completamente integrados de computacion parala investigacion y la educacion conformados por:
Interfaz grafica (worksheet) o ambiente interactivo:
Procesador de texto, de formulas y de graficas.
Con salidas en Latex, RTF, HTML, FORTRAN y C; o hyperlinks a otros documentos.
Manuales en lınea.
Enlaces a otros programas y bibliotecas
Capacidades para calculo numerico
Capacidades para visualizacion, con salidas graficas en diferentes formatos: PostScript, GIF,JPG, . . .
Pensado para usuarios no especializados en computacion
377

Borra
dor Pre
limin
ar
12.1. INTRODUCCION A LOS CAS
Figura 12.1: Ventana grafica de vxMaxima
La principal ventaja de estos programas radica en la enorme capacidad para realizar calculos algebraicoslargos y tediosos. Por ejemplo, se puede demostrar que la funcion:
f =
sen
(nz√x2+y2+z2√y2+z2
)√x2 + y2 + z2
es solucion de la ecuacion diferencial:
∂4f
∂x4+
∂4f
∂y2x2+
∂4f
∂z2x2+ n2
[∂2f
∂x2+∂2f
∂y2
]= 0
y la realizacion de este calculo le puede tomar a un PC estandar un tiempo de CPU relativamente corto:
tiempo de cpu = 1,065 seg
Un ejemplo de un CAS es Maxima que basicamente consta de una hoja de trabajo (worksheet) que esuna interfaz tipo procesador de textos. Las hojas de trabajo constan de dos modos basicos de funcionamiento:el modo texto y el modo calculo. Maxima opera en la celda de calculos de la manera siguiente:
Input (Instruccion de entrada)
Output (respuesta del programa)
1Una comparacion de los diferentes CAS puede verse en: https://en.wikipedia.org/wiki/List_of_computer_algebra_
systems2http://docs.sympy.org/
378

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
Existe la posibilidad de introducir textos de la misma manera que en un procesador de textos estandary de generar graficas en 2D y 3D a traves de los respectivos comandos.
La interaccion con la hoja de trabajo se hace a traves de lo que denominamos la celda del Input, queaparece senalado por un aviso de espera o PROMPT
[ -->
El codigo fuente de Maxima, codigo de software libre, puede ser compilado sobre diferentes sistemas ope-rativos: Windows, Linux, MacOS X y Android, y puede obtenerse en: http://sourceforge.net/projects/wxmaxima o en http://andrejv.github.io/wxmaxima, con la respectiva documentacion.
Utilizaremos la version grafica wxMaxima para los fines pedagogicos del desarrollo de estas notas.Tambien existe una version que funciona solo en modo texto para ser ejecutada en una consola o terminal.
En la Figura 12.1 se puede apreciar el despliegue de una hoja de calculo con algunos instrucciones sencillas,notemos que cada instruccion (en azul) termina con un punto y coma, de esta manera se le dice al programala finalizacion del comando a ejecutar. Luego de escribir la instruccion y presionar la tecla Enter � el Outputaparecera a continuacion en color negro.
12.2. Maxima: Sintaxis basica
Es necesario familiarizarse con los comandos basicos del programa, para ello iremos desarrollando algunoscalculos sencillos a manera de conocer la filosofıa de como funciona Maxima, y durante el transcurso deeste curso iremos haciendo un despliegue de las aplicaciones del programa para calculos mas especıficos.
(%i1) 3!+3^5;
( %o1) 249
Veamos ahora la diferencia entre el igual = y los dos puntos :
(%i2) a=b+c;
( %o2) c+b
(%i3) a;
( %o3) a
(%i4) a:b+c;
( %o4) c+b
(%i5) a;
( %o5) c+b
Al usar “=”no asignamos a la variable lo que esta del lado derecho mientras que con “:”si le asignamosel objeto a la nueva variable.
Los calculos se pueden hacer tanto con numeros enteros como en Punto Flotante:
(%i6) 15+5^(50);
( %o6) 88817841970012523233890533447265640
379

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
(%i7) 15.0+5^(50);
( %o7) 8,881784197001253× 1034
Pero el enfasis radica en los calculos exactos:
(%i8) cos(%pi/12)^2 + log(2/3+5)/7;
( %o8) cos2( π
12
)+
log(
173
)7
y si queremos el valor numerico podemos escribir
(%i9) float(%);
( %o9) 1,180812852661949
Aquı hemos hecho uso de varios sımbolos nuevos. Las constantes matematicas en Maxima se escribende la siguiente manera:
La unidad imaginaria i: %i
El numero π: %pi.
El sımbolo ∞: inf.
El numero e: %e.
En cuanto a los logaritmos:
ex = exp(x).
log(x): la funcion logaritmo en base e
log(x)/log(b) el logaritmo de x en base b.
Para las funciones trigonometricas es lo estandar: sin(x), asin(x), cos(x), acos(x), tan(x), atan(x), csc(x),sec(x), cot(x).
Tambien hemos utilizado % para introducir la ultima salida en la siguiente instruccion, veamos nueva-mente como funciona, pero ahora pondremos al final del comando el sımbolo $ en lugar de ; para decirle alprograma que ejecute la instruccion sin escribir la salida.
(%i10)3^12$
(%i11)%;
( %o11) 531441
Veamos otro ejemplo:
(%i12)alpha;
( %o12)α
(%i13)%+sqrt(beta);
380

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
( %o13)√β + α
(%i14)%o12+2*gamma^2;
( %o14) 2 γ2 + α
Es importante tener cuidado a la hora de poner los parentesis en las expresiones:
(%i15)1+2*3^2;
( %o15) 19
(%i16)(1+2)*3^2;
( %o16) 27
El volumen de un cilindro V = π(radio)2 × altura
(%i17)radio:5$
(%i18)altura:50$
(%i19)area:%pi*radio^2;
( %o19) 25π
(%i20)volumen:area*altura;
( %o20) 1250π
Para limpiar la memoria del programa de todas las variables utilizadas se puede usar el comando kill(all)(Existen otras opciones que veremos mas adelante). Esta es una manera de reiniciar la hoja de trabajo.
(%i21)volumen;
( %o21) 1250π
(%i22)kill(all);
( %o22) done
(%i23)volumen;
( %o23) volumen
12.2.1. Calculos elementales
Se puede definir, evaluar y derivar funciones abstractas utilizando := como se muestra a continuacion
(%i1) f(x,y):=exp(x^2+y^2)/(x-y);
( %o1) f (x, y) :=exp(y2 + x2
)x− y
(%i2) f(2,3);
( %o2) − e13
381

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
(%i3) %,numer;
( %o3) − 442413,3920089205
(%i4) f(alpha^(1/2),beta^(1/2));
( %o4)eβ+α
√α−√β
Derivando respecto a x y y;
(%i5) diff(f(x,y),x) + diff(f(x,y),y);
( %o5)2 y ey
2+x2
x− y+
2x ey2+x2
x− y
Aquı es bueno acotar que una expresion NO es una funcion:
(%i6) f(x):=3*sin(x+1)+2*sqrt(x);
( %o6) f(x) := 3 sin (x+ 1) + 2√x
(%i7) F:3*sin(x+1)+2*sqrt(x);
( %o7) 3 sin (x+ 1) + 2√x
(%i8) f(8); F(8);
( %o8) 3 sin 9 + 252
( %o9)(3 sin (x+ 1) + 2
√x)
(8)
Por lo tanto, F es unicamente una expresion que no puede ser evaluada como la funcion f . Pero se lepuede dar la vuelta para evaluarla con ev()
(%i10)ev(F,x=8);
( %o10) 3 sin 9 + 252
Consideremos los siguientes calculos basicos:
(%i11)kill(all)$
(%i1) sigma(x):=2*x/sqrt(x^2+1);
( %o1) σ (x) :=2x√x2 + 1
La primera derivada:
(%i2) diff(sigma(x),x);
( %o2)2√
x2 + 1− 2x2
(x2 + 1)32
La cuarta derivada:
382

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
(%i3) diff(sigma(x),x,4);
( %o3)90x
(x2 + 1)52
− 300x3
(x2 + 1)72
+210x5
(x2 + 1)92
Si queremos reutilizar la derivada para definir una nueva funcion, en este caso la funcion derivada, lopodemos hacer utilizando dos apostrofos ” (No es la doble comilla)
(%i4) dsigma(x):=’’ %o2;
( %o4) dsigma (x) :=2√
x2 + 1− 2x2
(x2 + 1)32
(%i5) dsigma(2);
( %o5)2
532
(%i6) integrate(sigma(x),x);
( %o6) 2√x2 + 1
La misma integral, pero definida para x entre 0 y 1.
(%i7) integrate(sigma(x),x,0,1);
( %o7) 2(√
2− 1)
Lımites:
(%i8) limit(sigma(x),x,1/2);
( %o8)2√5
(%i9) limit(sigma(x),x,inf);
( %o9) 2
Sumatorias:
(%i10)sum(sigma(i),i,0,6);
( %o10)12√37
+10√26
+8√17
+6√10
+4√5
+√
2
Podemos calcular series de Taylor, digamos, alrededor de x = 1 y hasta orden 4.
(%i11)taylor(sigma(x),x,1,4);
( %o11)−1
128
(5 2
12
)(x− 1)
4+
1
16
(3 2
12
)(x− 1)
3+−1
8
(3 2
12
)(x− 1)
2+
1
22
12 (x− 1) + 2
12 + · · ·
Al rededor de x = 0 es mas simple todo:
383

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
(%i12)taylor(sigma(x),x,0,6);
( %o12)3
4x5 + (−1) x3 + 2x+ · · ·
Y por supuesto, tambien podemos hacer una grafica de la funcion. Para ello utilizaremos el comandowxplot2d que nos generara un grafico embebido dentro de la misma hoja de trabajo.
(%i13)wxplot2d(sigma(x),[x,-10,10]);
( %o13)
Los calculos anteriores se pueden repetir para que queden de una manera mas elegante usando unacamilla, esto hara que no se efectue la evaluacion de las operaciones.
(%i14)’diff(sigma(x),x)=diff(sigma(x),x);
( %o14)d
d x
(2x√x2 + 1
)=
2√x2 + 1
− 2x2
(x2 + 1)32
(%i15)’integrate(sigma(x),x,0,1)=integrate(sigma(x),x,0,1);
( %o15) 2
∫ 1
0
x√x2 + 1
dx = 2(√
2− 1)
(%i16)’limit(sigma(x),x,inf)=limit(sigma(x),x,inf);
( %o16) 2
(lımx→∞
x√x2 + 1
)= 2
(%i17)’sum(sigma(i),i,0,6)=sum(sigma(i),i,0,6);
( %o17) 2
6∑i=0
i√i2 + 1
=12√37
+10√26
+8√17
+6√10
+4√5
+√
2
384

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
Anteriormente mencionamos que uno de las ventajas de los programas de manipulacion simbolica es lagran capacidad de llevar a cabo calculos largos y tediosos, veamos entonces como se hace para demostrarque la funcion antes mencionada:
(%i18)f(x,y,z):=sin(n*z*sqrt(x^2+y^2+z^2)/sqrt(y^2+z^2))/sqrt(x^2+y^2+z^2);
( %o18) f (x, y, z) :=
sin
(n z√z2+y2+x2√z2+y2
)√z2 + y2 + x2
es solucion de la ecuacion diferencial
∂4f
∂x4+
∂4f
∂y2x2+
∂4f
∂z2x2+ n2
[∂2f
∂x2+∂2f
∂y2
]= 0
(%i19)diff(f(x,y,z),x,4)+diff(diff(f(x,y,z),x,2),y,2)+diff(diff(f(x,y,z),x,2),z,
2)+n^2*(diff(f(x,y,z),x,2)+diff(f(x,y,z),y,2));
( %o19) (( Expression too long to display! ))
Aquı Maxima no hace un despliegue en la pantalla de los calculos porque la expresion matematicaes muy larga. Existen opciones para que muestre en pantalla los que nos interese que iremos viendo masadelante.
Necesitamos entonces decirle al programa que la expresion anterior sea simplificada, es decir, que minimicela expresion a su valor mas simple. Para simplificar expresiones que contienen radicales, exponenciales ologaritmos es conveniente utilizar el comando ratsimp. Tambien existe la opcion fullratsimp
(%i20)ratsimp(%);
( %o20) 0
En la mayorıa de los casos Maxima no factoriza ni desarrolla automaticamente las expresiones, porlo tanto, debemos indicarle al programa que haga las respectivas simplificaciones. Veamos un ejemplo conpolinomios:
(%i21)kill(all)$
(%i1) p:(x+2)*(x-1);
( %o1) (x− 1) (x+ 2)
(%i2) q:(x-3)^2;
( %o2) (x− 3)2
(%i3) p-q;
( %o3) (x− 1) (x+ 2)− (x− 3)2
(%i4) expand(p-q);
( %o4) 7x− 11
385

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
(%i5) expand(p/q);
( %o5)x2
x2 − 6x+ 9+
x
x2 − 6x+ 9− 2
x2 − 6x+ 9
Si queremos dividir usando fracciones simples podemos hacer lo siguiente:
(%i6) partfrac(p/q,x);
( %o6)7
x− 3+
10
(x− 3)2 + 1
Las funciones logexpand y radexpand permiten controlar si queremos simplificar logaritmos y radicalescuando contienen productos. Veamos:
(%i7) log(x*y);
( %o7) log (x y)
(%i8) sqrt(x*y);
( %o8)√x y
(%i9) sqrt(x^2);
( %o9) |x|
(%i10)radexpand:all$ logexpand:all$
(%i11)log(x*y); sqrt(x*y); sqrt(x^2);
( %o11) log y + log x( %o12)
√x√y
( %o13)x
Lo inverso a la expansion de expresiones es la factorizacion:
(%i14)factor(200);
( %o14) 23 52
(%i15)factor(x^2+x-2);
( %o15) (x− 1) (x+ 2)
(%i16)p:x^3-1;
( %o16)x3 − 1
(%i17)factor(%);
( %o17) (x− 1)(x2 + x+ 1
)La evaluacion de expresiones se realiza de la manera siguiente
386

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
(%i18)ev(p,x=8);
( %o18) 511
O tambien
(%i19)p,x=%pi;
( %o19)π3 − 1
(%i20)ev(x+(x+y)^2-3*(x+y)^3,x+y=t);
( %o20)x− 3 t3 + t2
Para finalizar con esta guıa rapida de Maxima veamos el uso de uno de los comandos mas comunes deestos programas, y que tiene que ver con la solucion de ecuaciones.
(%i21)ecu:3*x^2+2*x+x^3-x^2=2*x^2;
( %o21)x3 + 2x2 + 2x = 2x2
(%i22)sol:solve(ecu,x);
( %o22)[x = −
√2 %i, x =
√2 %i, x = 0
]Recordemos que %i es la notacion para el imaginario i.Si necesitamos aislar una de las soluciones usamos el comando rhs (de right-hand side):
(%i23)rhs(part(sol,1)); rhs(part(sol,2));
( %o23) −√
2 %i
( %o24)√
2 %i
Para un sistema de ecuaciones, digamos, dos ecuaciones con dos incognitas:
(%i25)ecu1:x^2+y^2=1;
( %o25) y2 + x2 = 1
(%i26)ecu2:(x-2)^2+(y-1)^2=4;
( %o26) (y − 1)2
+ (x− 2)2
= 4
(%i27)solve([ecu1,ecu2],[x,y]);
( %o27)
[[x =
4
5, y = −3
5
], [x = 0, y = 1]
]Cuando el sistema no tiene solucion Maxima responde de la siguiente manera
(%i28)solve([x+y=0,x+y=1],[x,y]);
387

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
( %o28) [ ]
En el caso de un sistema que tiene mas incognitas que ecuaciones el programa utiliza los sımbolos%r1, %r2... para indicar los parametros arbitrarios
(%i29)solve([x+y+z=9,x-y=2*z],[x,y,z]);
( %o29)
[[x =
%r1 + 9
2, y = −3 %r1 − 9
2, z = %r1
]]En lugar de solve se puede recurrir a un comando diferente que hace lo mismo, pero que es mas eficiente
desde el punto de vista de los recursos usados por el computador, el comando es linsolve para ecuacioneslineales.
(%i30)ecus:[x+y+z+w=1,x-y+z-w=-2,x+y-w=0];
( %o30) [z + y + x+ w = 1, z − y + x− w = −2, y + x− w = 0]
(%i31)linsolve(ecus,[x,y,z]);
( %o31)
[x =
4w − 3
2, y = −2w − 3
2, z = 1− 2w
]En el caso de polinomios de orden superior el resultado estara dado de forma aproximada:
(%i32)ec:x^7+x^5-x^3+x-2;
( %o32)x7 + x5 − x3 + x− 2
(%i33)allroots(ec);
[ x=0.766414088337633 %i+0.5507199727230275 ,
x=0.5507199727230275-0.766414088337633 %i ,
x=0.4922671445862202 %i - 0.9637112977011089 ,
x=-0.4922671445862202 %i -0.9637112977011089 ,
x=1.381985877916414 %i -0.08700867502191806 ,
x=-1.381985877916414 %i -0.08700867502191806 ,
x=0.9999999999999988 ]
(%i34)realroots(ec);
( %o34) [x = 1]
Otro tipo de ecuaciones a resolver son las ecuaciones diferenciales. Veamos como funciona con la ecuacionesdiferenciales ordinarias
(%i35)ecd:(2*x+1)*’diff(y,x)+y*(x-1)=0;
( %o35) (2x+ 1)
(d
d xy
)+ (x− 1) y = 0
(%i36)ode2(ecd,y,x);
388

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
( %o36) y = %c e3 log(2 x+1)
4 − x2
Por ser una ecuacion diferencial de primer orden debe aparecer una constante en la solucion. La constanteaquı es denotada por “ %c”.
(%i37)ecd2:’diff(y,x,2)-3*’diff(y,x)+2*y=x;
( %o37)d2
d x2y − 3
(d
d xy
)+ 2 y = x
(%i38)ode2(ecd2,y,x);
( %o38) y = %k1 e2 x + %k2 e
x +2x+ 3
4
Para el caso de que se tengan condiciones iniciales utilizamos ic2 para indicar las condiciones
(%i39)ic2(%o38,x=0,y=0,diff(y,x)=1);
( %o39) y =5 e2 x
4− 2 ex +
2x+ 3
4
Y para valores de contorno bc2
(%i40)bc2(%o38,x=0,y=0,x=1,y=0);
( %o40) y =(3 e− 5) e2 x
4 e2 − 4 e−(3 e2 − 5
)ex
4 e2 − 4 e+
2x+ 3
4
Existe el comando desolve para resolver tambien ecuaciones o sistemas de ecuaciones diferenciales or-dinarias lineales utilizando transformadas de Laplace. Trabaja de manera parecida a ode2 pero se necesitaespecificar la dependencia de las funciones con las variables independientes.
(%i41)ecd3:’diff(y(x),x,2)-y(x)=2*x;
( %o41)d2
d x2y (x)− y (x) = 2x
(%i42)desolve(ecd3,[y(x)]);
( %o42) y (x) =ex(dd x y (x)
∣∣x=0
+ y (0) + 2)
2−e−x
(dd x y (x)
∣∣x=0− y (0) + 2
)2
− 2x
Si tenemos condiciones iniciales en x = 0 entonces podemos escribir:
(%i43)atvalue(y(x),x=0,1); atvalue(diff(y(x),x),x=0,2);
( %o43) 1( %o44) 2
(%i45)desolve(ecd3,[y(x)]);
( %o45) y (x) =5 ex
2− 3 e−x
2− 2x
Si desolve no encuentra una solucion, entonces devuelve “false”.
389
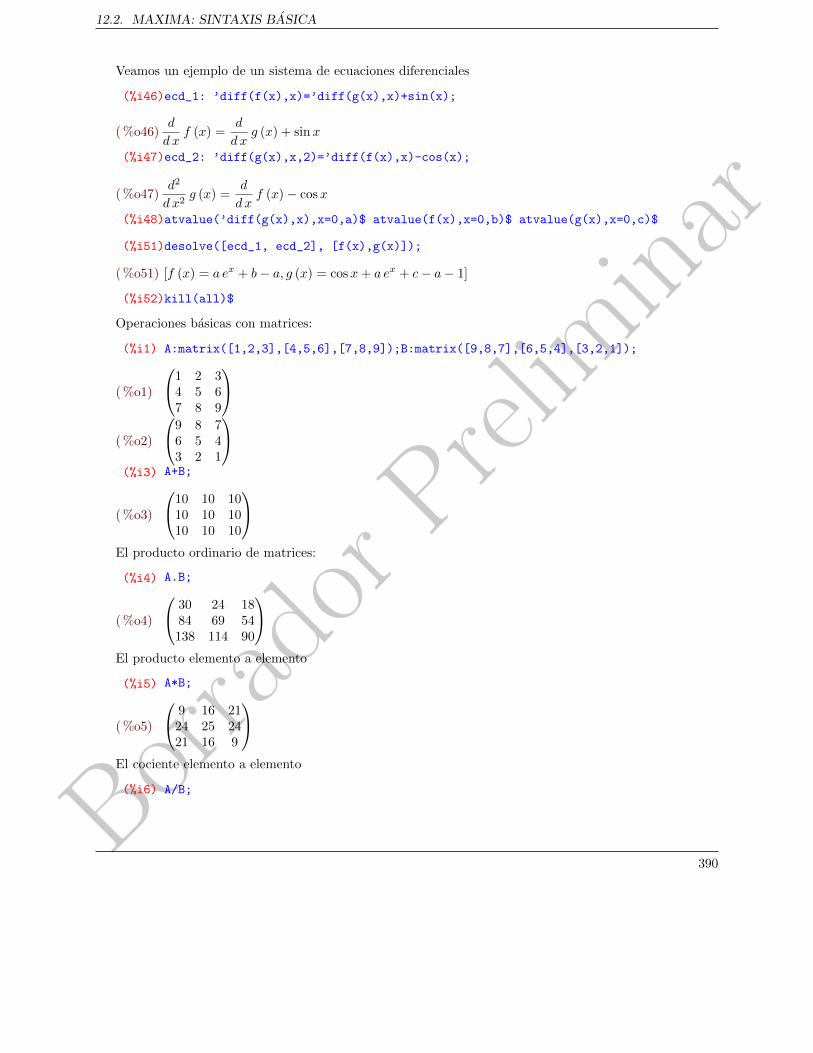
Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
Veamos un ejemplo de un sistema de ecuaciones diferenciales
(%i46)ecd_1: ’diff(f(x),x)=’diff(g(x),x)+sin(x);
( %o46)d
d xf (x) =
d
d xg (x) + sinx
(%i47)ecd_2: ’diff(g(x),x,2)=’diff(f(x),x)-cos(x);
( %o47)d2
d x2g (x) =
d
d xf (x)− cosx
(%i48)atvalue(’diff(g(x),x),x=0,a)$ atvalue(f(x),x=0,b)$ atvalue(g(x),x=0,c)$
(%i51)desolve([ecd_1, ecd_2], [f(x),g(x)]);
( %o51) [f (x) = a ex + b− a, g (x) = cosx+ a ex + c− a− 1]
(%i52)kill(all)$
Operaciones basicas con matrices:
(%i1) A:matrix([1,2,3],[4,5,6],[7,8,9]);B:matrix([9,8,7],[6,5,4],[3,2,1]);
( %o1)
1 2 34 5 67 8 9
( %o2)
9 8 76 5 43 2 1
(%i3) A+B;
( %o3)
10 10 1010 10 1010 10 10
El producto ordinario de matrices:
(%i4) A.B;
( %o4)
30 24 1884 69 54138 114 90
El producto elemento a elemento
(%i5) A*B;
( %o5)
9 16 2124 25 2421 16 9
El cociente elemento a elemento
(%i6) A/B;
390

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
( %o6)
19
14
37
23 1 3
273 4 9
El producto por un escalar:
(%i7) n*A;
( %o7)
n 2n 3n4n 5n 6n7n 8n 9n
Podemos generar matrices de muchas maneras
(%i8) a[i,j]:=i^2 + j^2$
(%i9) A:genmatrix(a,4,4);
( %o9)
2 5 10 175 8 13 2010 13 18 2517 20 25 32
Tambien de manera interactiva:
(%i10)n:3$
(%i11)M:entermatrix(n,n)$
Is the matrix 1. Diagonal 2. Symmetric 3. Antisymmetric 4. General
Answer 1, 2, 3 or 4 : 1;
Row 1 Column 1: (x+y)^n$
Row 2 Column 2: (x-y)^(n+1)$
Row 3 Column 3: (x.y)^(n-1)$
Matrix entered.
(%i12)M;
( %o12)
(y + x)3
0 0
0 (x− y)4
0
0 0 (x · y)2
La matriz identidad de tamano n x n usamos el comando ident(n), como mostramos a continuacion
(%i13)ident(4);
( %o13)
1 0 0 00 1 0 00 0 1 00 0 0 1
391

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
12.2.2. Bibliotecas
No todos los comandos estan disponibles en la memoria cuando el programa es iniciado. Solo los coman-dos estandar son cargados automaticamente. Pero podemos contar con funciones adicionales para trabajarcargando al programa los diferentes paquetes, modulos o librerıas que dispone Maxima. Por ejemplo, elpaquete vect nos permite introducir vectores y operar con ellos.
El paquete vect debe entonces ser previamente cargado y se hace de la manera siguiente:
(%i1) load(vect)$
Las operaciones basicas de suma, resta, multiplicacion y multiplicacion por escalares de vectores laspodemos ver a continuacion, pero primero debemos saber como introducir los vectores al programa.
Por ejemplo, para los vectores a = 2i + 4j + 6k, b = 5i + 7j + 9k y c = i + 3j, tenemos:
(%i2) a:[2,4,6];
( %o2) [2, 4, 6]
(%i3) b:[5,7,9];
( %o3) [5, 7, 9]
(%i4) c:[1,3,0];
( %o4) [1, 3, 0]
(%i5) a+b+c;
( %o5) [8, 14, 15]
(%i6) 3*a+5*b-c;
( %o6) [30, 44, 63]
Si queremos calcular el modulo de los vectores podemos hacerlo definiendo una funcion: la funcion modulo,como mostramos a continuacion:
(%i7) modulo(a):=sqrt(a.a);
( %o7) modulo(a) :=√a.a
(%i8) modulo(a); modulo(b); modulo(c);
( %o8) 2√
14
( %o9)√
155
( %10)√
10
Para el producto escalar usamos un punto
(%i11)a.b;
( %11) 92
Mientras que para el producto vectorial debemos usar la tilde ∼ y escribir lo siguiente
392

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
Figura 12.2: Curvas integrales para y′ = −x+ e−y
(%i12)express(a~b);
( %o12) [−6, 12,−6]
(%i13)express(b~a);
( %o13) [6,−12, 6]
De manera que el producto triple lo podemos calcular asi:
(%i14)c.(express(a~b));
( %o14) 30
Otra librerıa que podemos explorar es plotdf que nos permite realizar graficos del tipo y′ = f(x, y) yhacernos una idea de como es la solucion de esta ecuacion diferencial.
(%i1) load(plotdf)$
La librerıa plotdf nos permite estudiar los campos de direcciones y las curvas integrales a traves delestudio de las pendientes. Veamos la siguiente ecuacion diferencial
y′ = −x+ e−y
su solucion, de manera grafica, es decir los campos de direcciones lo podemos obtener escribiendo el siguiente
393

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
Figura 12.3: Curva integrales para y′ = −x+ e−y y que pasa por el punto (2, 3)
comando.
(%i2) plotdf(-x+exp(-y));
La grafica que resulta puede verse en la Figura 12.2 y cada curva integral (curvas en rojo) se obtienehaciendo un “click”sobre un punto de la grafica, esto generara la curva integral que pasa por ese punto.
Por otra parte, existen varias opciones para el comando plotdf. Supongamos que queremos la trayectoriaque pase por el punto especıfico (2, 3). Para tal fin escribimos
(%i3) plotdf(-x+exp(-y),[trajectory_at,2,3]);
Y la grafica obtenida puede verse en la Figura 12.3.Tambien nos podemos encontrar con que la ecuacion diferencial depende de algun parametro, digamos
κ. Por ejemploy′ = −x+ κe−y
y nos gustarıa obtener una grafica para algun valor del parametro en partıcular, digamos κ = −0,5. Entoncespodemos escribir
(%i4) plotdf(-x+exp(-kappa*y),[parameters,"kappa=-0.5"]);
O, si queremos recorrer, en una misma figura, los diferentes valores del parametro usamos la opcionsliders, como se muestra a continuacion
394

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
Figura 12.4: Curva integrales para y′ = −x+ κe−y y para diferentes valores de κ.
(%i5) plotdf(-x+exp(-kappa*y),[parameters,"kappa=-0.5"],[sliders,"kappa=-3:3"]);
La grafica que se obtiene se muestra en la Figura 12.4, y como se puede ver, en la parte inferior aparece unboton deslizante y el valor del parametro κ. Al deslizar el boton, estaremos cambiando el valor del parametroque en este caso variara entre −3 y 3, podremos apreciar entonces como los campos de direcciones y las curvasintegrales seleccionadas cambian.
395
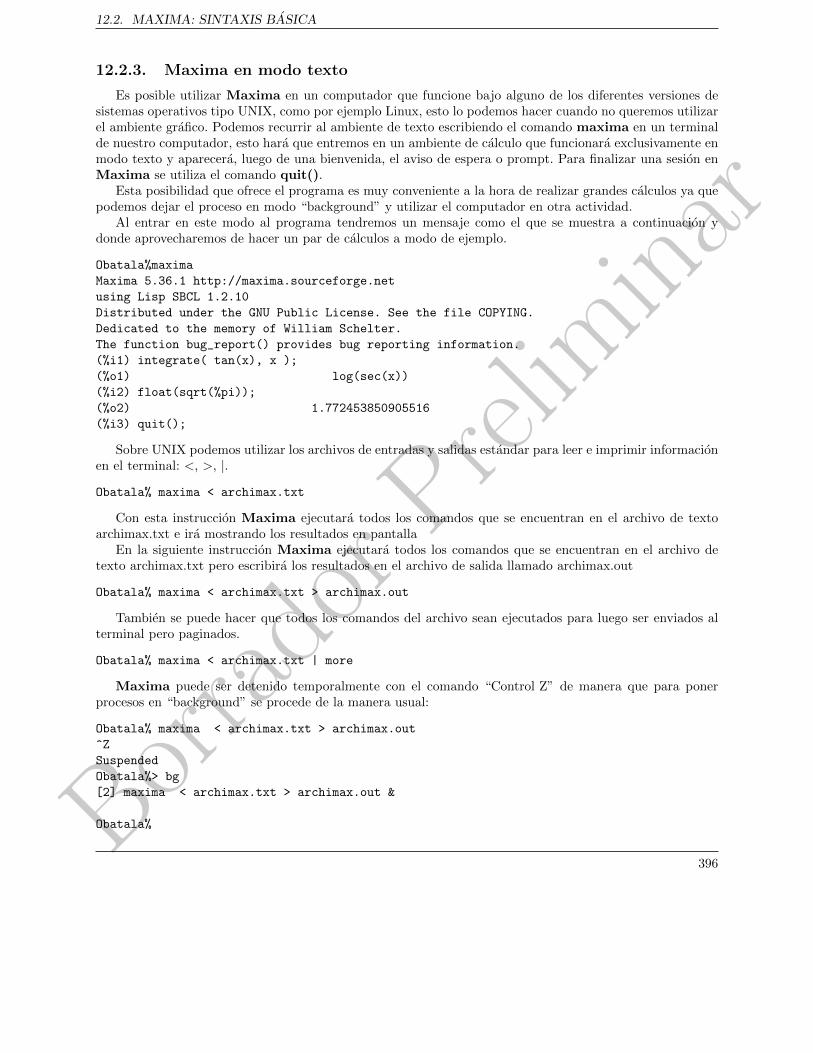
Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
12.2.3. Maxima en modo texto
Es posible utilizar Maxima en un computador que funcione bajo alguno de los diferentes versiones desistemas operativos tipo UNIX, como por ejemplo Linux, esto lo podemos hacer cuando no queremos utilizarel ambiente grafico. Podemos recurrir al ambiente de texto escribiendo el comando maxima en un terminalde nuestro computador, esto hara que entremos en un ambiente de calculo que funcionara exclusivamente enmodo texto y aparecera, luego de una bienvenida, el aviso de espera o prompt. Para finalizar una sesion enMaxima se utiliza el comando quit().
Esta posibilidad que ofrece el programa es muy conveniente a la hora de realizar grandes calculos ya quepodemos dejar el proceso en modo “background” y utilizar el computador en otra actividad.
Al entrar en este modo al programa tendremos un mensaje como el que se muestra a continuacion ydonde aprovecharemos de hacer un par de calculos a modo de ejemplo.
Obatala%maxima
Maxima 5.36.1 http://maxima.sourceforge.net
using Lisp SBCL 1.2.10
Distributed under the GNU Public License. See the file COPYING.
Dedicated to the memory of William Schelter.
The function bug_report() provides bug reporting information.
(%i1) integrate( tan(x), x );
(%o1) log(sec(x))
(%i2) float(sqrt(%pi));
(%o2) 1.772453850905516
(%i3) quit();
Sobre UNIX podemos utilizar los archivos de entradas y salidas estandar para leer e imprimir informacionen el terminal: <, >, |.
Obatala% maxima < archimax.txt
Con esta instruccion Maxima ejecutara todos los comandos que se encuentran en el archivo de textoarchimax.txt e ira mostrando los resultados en pantalla
En la siguiente instruccion Maxima ejecutara todos los comandos que se encuentran en el archivo detexto archimax.txt pero escribira los resultados en el archivo de salida llamado archimax.out
Obatala% maxima < archimax.txt > archimax.out
Tambien se puede hacer que todos los comandos del archivo sean ejecutados para luego ser enviados alterminal pero paginados.
Obatala% maxima < archimax.txt | more
Maxima puede ser detenido temporalmente con el comando “Control Z” de manera que para ponerprocesos en “background” se procede de la manera usual:
Obatala% maxima < archimax.txt > archimax.out
^Z
Suspended
Obatala%> bg
[2] maxima < archimax.txt > archimax.out &
Obatala%
396

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
O si lo preferimos, y de manera equivalente, podemos escribir la instruccion pero ponemos al final &
Obatala% maxima < archimax.txt > archimax.out &
[1] 5114
12.2.4. Invocando la ayuda
El ambiente wxMaxima permite acceder al manual de ayuda facilmente visible en la barra de herra-mientas, parte superior de la ventana. Pero tambien si conocemos el comando podemos escribir, por ejemplo:
(%i1) describe(diff);
0: diff (Functions and Variables for Differentiation)
1: diff <1> (Functions and Variables for Differentiation)
2: diff <2> (Functions and Variables for itensor)
Enter space-separated numbers, ‘all’ or ‘none’:
Al seleccionar una de las opciones, por ejemplo si escribimos 1 despues de los dos puntos, aparecera ladescripcion completa del comando:
-- Function: diff
diff (<expr>, <x_1>, <n_1>, ..., <x_m>, <n_m>)
diff (<expr>, <x>, <n>)
diff (<expr>, <x>)
diff (<expr>)
Returns the derivative or differential of <expr> with respect to
some or all variables in <expr>.
’diff (<expr>, <x>, <n>)’ returns the <n>’th derivative of <expr>
with respect to <x>.
’diff (<expr>, <x_1>, <n_1>, ..., <x_m>, <n_m>)’ returns the mixed
partial derivative of <expr> with respect to <x_1>, ..., <x_m>. It
is equivalent to ’diff (... (diff (<expr>, <x_m>, <n_m>) ...),
<x_1>, <n_1>)’.
’diff (<expr>, <x>)’ returns the first derivative of <expr> with
respect to the variable <x>.
’diff (<expr>)’ returns the total differential of <expr>, that is,
the sum of the derivatives of <expr> with respect to each its
variables times the differential ’del’ of each variable. No
further simplification of ’del’ is offered.
The noun form of ’diff’ is required in some contexts, such as
stating a differential equation. In these cases, ’diff’ may be
quoted (as ’’diff’) to yield the noun form instead of carrying out
the differentiation.....
There are also some inexact matches for ‘diff’.
Try ‘?? diff’ to see them.
Tambien podemos utilizar:
(%i2) apropos("diff");
397

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
[covdiff,diff,maxtaydiff,pdiff_diff_var_names,pdiff_prime_limit...]
O pedirle al programa algunos ejemplos
(%i3) example(diff);
(%i4) kill(f,g,h,x,y)
(%o4) done
(%i5) diff(sin(x)+x^3+2*x^2,x)
(%o5) cos(x)+3*x^2+4*x
(%i6) diff(sin(x)*cos(x),x)
(%o6) cos(x)^2-sin(x)^2
(%i7) diff(sin(x)*cos(x),x,2)
(%o7) -4*cos(x)*sin(x)
.
.
.
Las ayudas completas de Maxima se pueden consultar en: http://maxima.sourceforge.net/es/
12.2.5. Ejercicios
1. Calcule:
a) los 70 primeros decimales del numero e
b) el arco coseno hiperbolico de 1
c) la expansion de sin(2 arctan(x))
2. Para la siguiente funcion
f(x) =(x+ 1)3
√x2 − 1
Calcule
a) ∂f(x)∂x , ∂f(x)
∂x2
b) ∫f(x)dx ,
∫ 4
2
f(x)dx
c)lımx→∞
f(x) , lımx→−∞
f(x) , lımx→0
f(x)
d) Haga un grafico de f(x) para valores de x ∈ [−5, 5].
3. Encuentre las raıces dep = x7 + x5 + 2x+ x
4. Resuelva la siguiente ecuacion diferencial
xdy(x)
dx= y(x) ln(xy(x))− y(x);
y haga una grafica del campo de direcciones que muestre algunas curvas integrales.
398

Borra
dor Pre
limin
ar
12.2. MAXIMA: SINTAXIS BASICA
5. Resuelva la siguiente ecuacion diferencial
d2y(t)
d2t−(1− y(t)2
) dy(t)
dt+ y(t) = 0 , con: y(0) = 0 ,
dy(t)
dt= −0,1
6. Realice los ejercicios de la seccion ?? con la ayuda de la librerıa vect de Maxima.
7. En un archivo de texto escriba las siguientes instrucciones que tienen que ver con operaciones denumeros complejos:
z_1=1+2%i;
z_2=3+4%i;
z_1+z_2;
z_1*z_2;
expand(%);
z_1/z_2;
rectform(%);
polarform(%);
guarde el archivo con el nombre pruebamax.txt y en un terminal de su computador, y en el mismodirectorio donde esta el archivo escriba:
localhost% maxima < pruebamax.txt > pruebamax.out &
y verifique que en el archivo pruebamax.out se haya realizado los calculos.
399

Borra
dor Pre
limin
arBibliografıa
[James Brown, Ruel Churchill 1999] James Brown and Ruel Churchill (1999) Complex Variables andApplications. (McGraw-Hill Education; 9th Edicion)
[Konrad Knopp 1996] Konrad Knopp (1996) Theory of Functions. (Dover Publications )
[Aleksandrov Kolmogorov y Lavrentiev 1999] A. D. Aleksandrov, A. N. Kolmogorov y M. A. Lavrentiev(1999) Mathematics: Its Content, Methods and Meaning. (Dover Publications, New York) Existetraduccion por Editorial Alianza Universidad.
[Arfken, Weber y Weber 2000] Arfken, G. B., Weber, H., y Weber, H.J. (2000) Mathematical Methodsfor Physicists 5ta Edicion (Academic Press, Nueva York)
[1] Byron, F.W. y Fuller W.F. (1970) Mathematics of Classical and Quantum Physics (Dover Pu-blications, New York)
[Cushing 1975] Cushing, J. (1975) Applied Analytical Mathematics for Physical Sciences (JohnWiley & Sons, New York)
[Hamming 1973] Hamming R.W. (1973) Numerical Methods For Scientist and Engineers, 2nd ed.(Dover, New York.)
[Hassani 1991] Hassani, S. (1991) Foundations of Mathematical Physics (Prentice Hall, InternationalEdition, London:)
[Lebedev 1972] Lebedev, N.N. (1972) Special Functions & Their Applications (Dover Publications,New York)
[math-atlas.org URL] The Mathematical Atlas http://www.math-atlas.org/welcome.html
[Richards 2002] Richards, D. (2002) Advanced Mathematical Methods with MAPLE (CambridgeUniversity Press Cambridge)
[Riley Hobson y Bence 2002] Riley, K.F., Hobson, M.P. y Bence, S.J. (2002) Mathematical Methods forPhysics and Engineering (Cambridge University Press Cambridge)
[Weisstein URL] Weisstein, E. W., MathWorld http://mathworld.wolfram.com/
400