mathematical foundations sections a-1 to a-5 some of the material in these slides may have been...
TRANSCRIPT

Mathematical Foundations
Sections
A-1 to A-5
Some of the material in these slides may have been adapted from university of Virginia, MIT and Åbo Akademi University
2
Mathematical Foundations
● I’ll give a brief, informal review of some of the mathematical tools we’ll employ■ Geometry (2D, 3D)■ Trigonometry■ Vector and affine spaces
○ Points, vectors, and coordinates
■ Dot and cross products■ Linear transforms and matrices
● I know that everyone knows that…
3
2D Geometry
● Know your high-school geometry:■ Total angle around a circle is 360° or 2π radians■ When two lines cross:
○ Opposite angles are equivalent○ Angles along line sum to 180°
■ Similar triangles:○ All corresponding angles are equivalent○ Corresponding pairs of sides have the same length ratio and are
separated by equivalent angles○ Any corresponding pairs of sides have same length ratio
4
Trigonometry
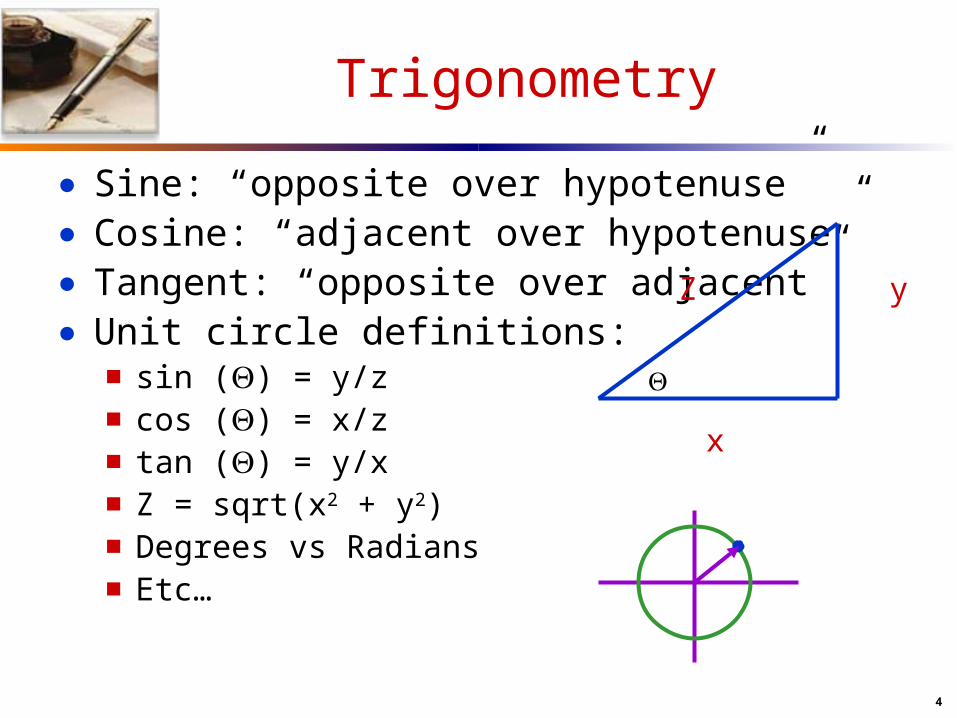
● Sine: “opposite over hypotenuse”● Cosine: “adjacent over hypotenuse”● Tangent: “opposite over adjacent”● Unit circle definitions:
■ sin () = y/z ■ cos () = x/z■ tan () = y/x■ Z = sqrt(x2 + y2)■ Degrees vs Radians■ Etc…
y
x
Z
5
3D Geometry
● To model, animate, and render 3D scenes, we must specify:■ Location■ Displacement from arbitrary locations■ Orientation
● We’ll look at two types of spaces:■ Vector spaces■ Affine spaces
● We will often be sloppy about the distinction
6
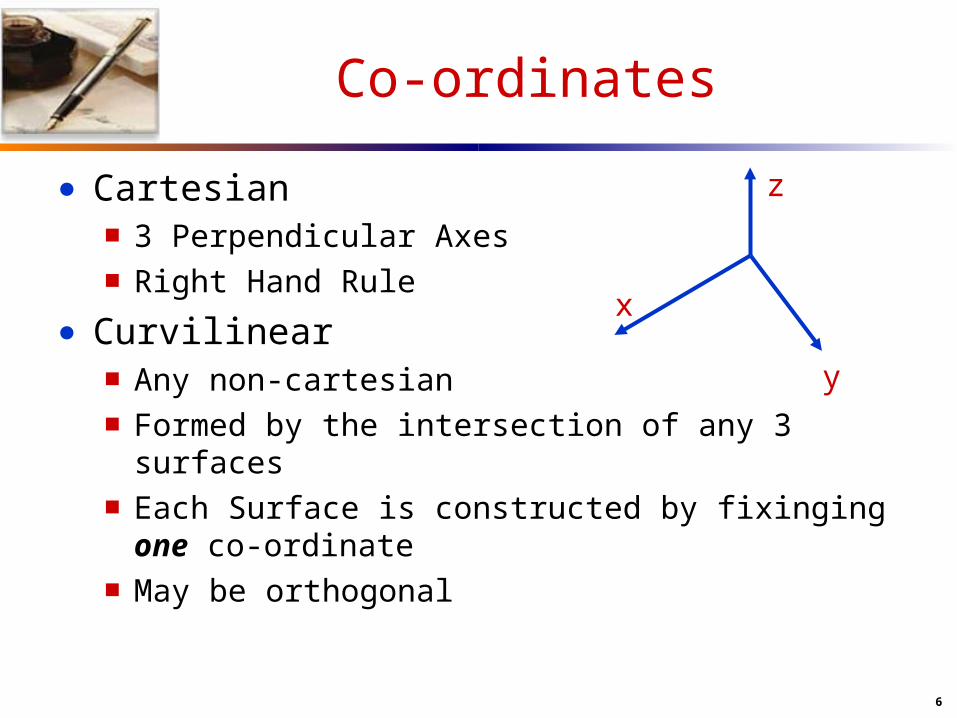
Co-ordinates
● Cartesian■ 3 Perpendicular Axes■ Right Hand Rule
● Curvilinear■ Any non-cartesian■ Formed by the intersection of any 3 surfaces■ Each Surface is constructed by fixinging one co-ordinate■ May be orthogonal
y
x
z
7
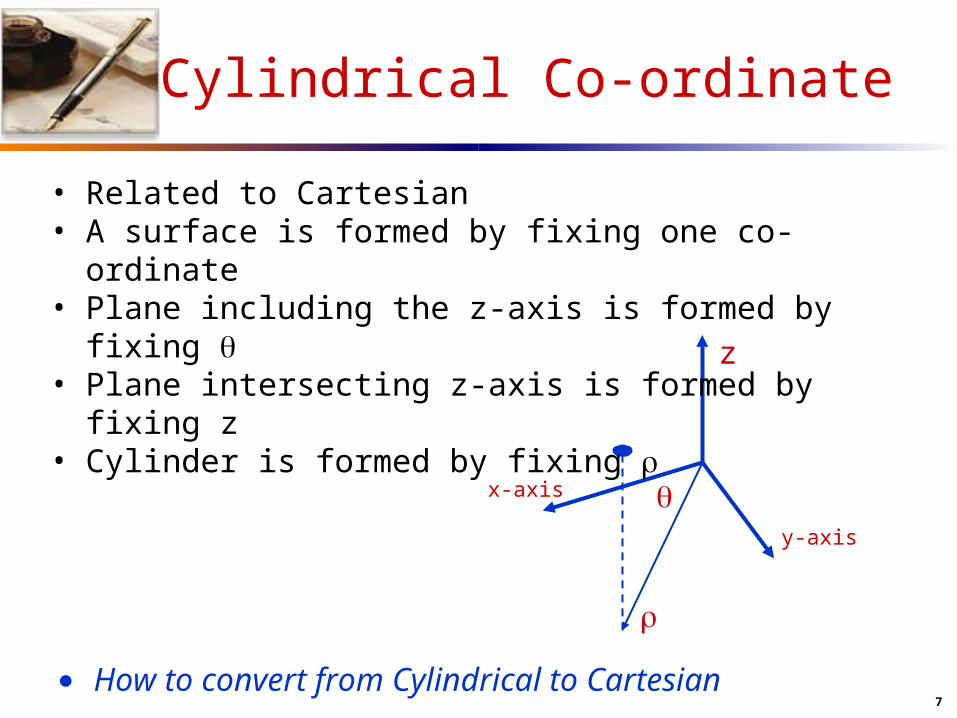
Cylindrical Co-ordinate
z
• Related to Cartesian• A surface is formed by fixing one co-ordinate• Plane including the z-axis is formed by fixing • Plane intersecting z-axis is formed by fixing z• Cylinder is formed by fixing
x-axis
y-axis
● How to convert from Cylindrical to Cartesian
8
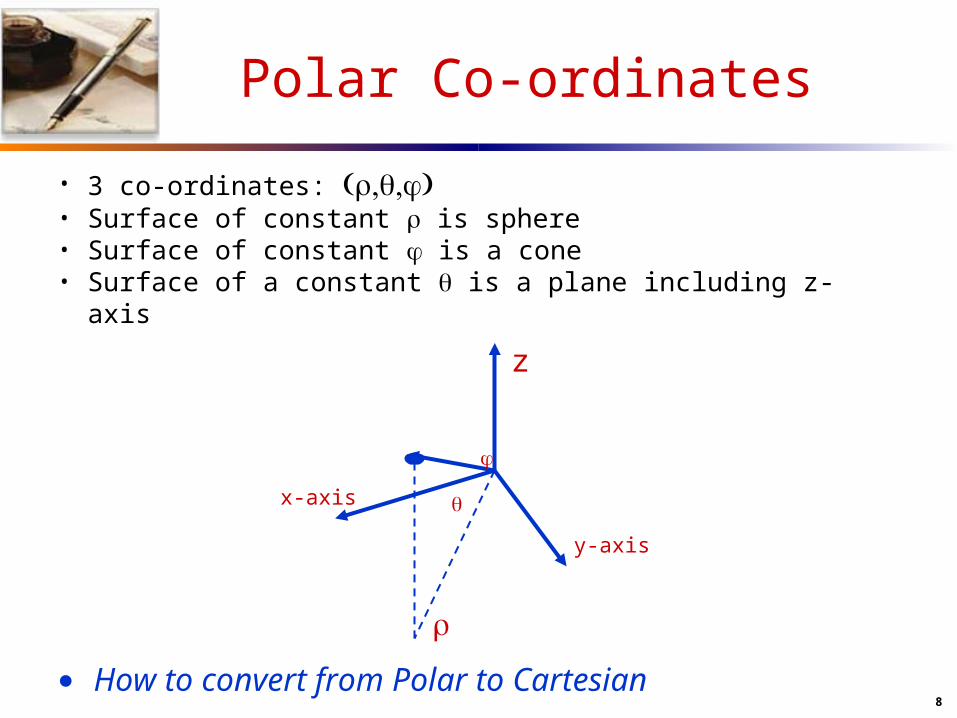
Polar Co-ordinates
• 3 co-ordinates: • Surface of constant is sphere• Surface of constant is a cone• Surface of a constant is a plane including z- axis
z
x-axis
y-axis
● How to convert from Polar to Cartesian
9
Vector Spaces
● A space is basically a set of elements with operations defined on the elements
● Two types of elements:■ Scalars (real numbers): … ■ Vectors (n-tuples): u, v, w, …
● Supports two operations:■ Addition operation u + v, with:
○ Identity 0 v + 0 = v○ Inverse - v + (-v) = 0
■ Scalar multiplication:○ Distributive rule: (u + v) = (u) + (v)
( + )u = u + u
10
Vector Spaces
● A linear combination of vectors results in a new vector:
v = 1v1 + 2v2 + … + nvn
● If the only set of scalars such that
1v1 + 2v2 + … + nvn = 0
is 1 = 2 = … = 3 = 0
then we say the vectors are linearly independent● The dimension of a space is the greatest number of linearly
independent vectors possible in a vector set● For a vector space of dimension n, any set of n linearly
independent vectors form a basis
11
Vector Spaces: A Familiar Example
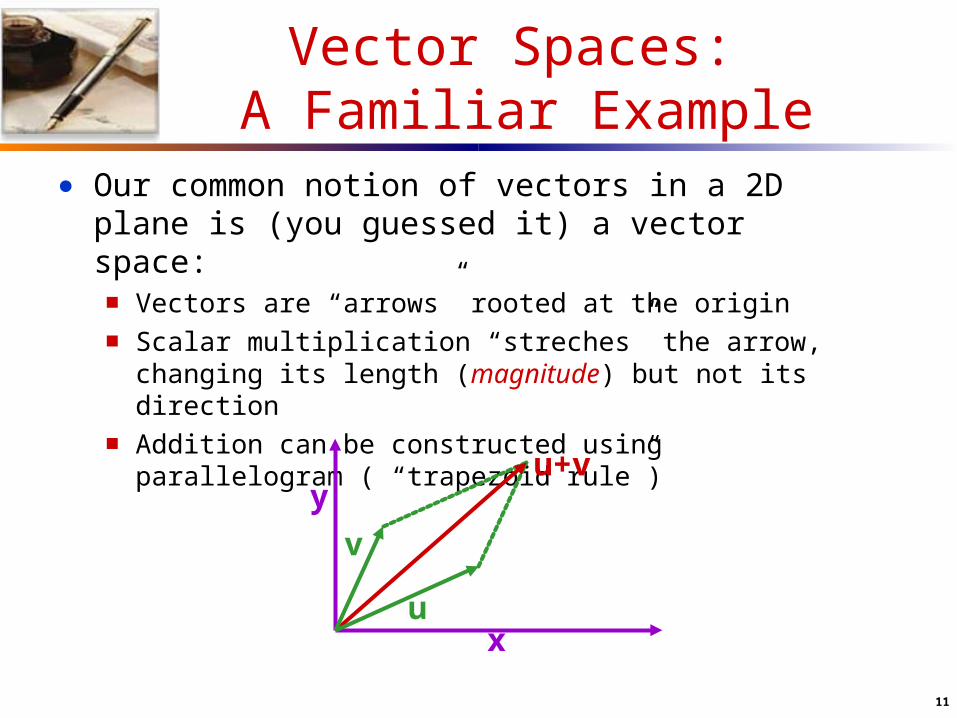
● Our common notion of vectors in a 2D plane is (you guessed it) a vector space:
■ Vectors are “arrows” rooted at the origin■ Scalar multiplication “streches” the arrow, changing its length
(magnitude) but not its direction■ Addition can be constructed using parallelogram ( “trapezoid rule”)
u+vy
xu
v
12
Vector Spaces: Basis Vectors
● Given a basis for a vector space:■ Each vector in the space is a unique linear combination of the basis
vectors■ The coordinates of a vector are the scalars from this linear combination■ Orthonormal Basis
○ Orthogonal uk.uj = 0, j k
○ Unit length uk.uk = 1
■ Best-known example: Cartesian coordinates○ Draw example on the board○ (i, j, k)
■ Note that a given vector v will have different coordinates for different bases

13
Vectors And Points
● We commonly use vectors to represent:■ Direction (i.e., orientation)■ Points in space (i.e., location)■ Displacements from point to point
● But we want points and directions to behave differently■ Ex: To translate something means to move it without
changing its orientation■ Translation of a point = different point■ Translation of a direction = same direction
14
Affine Spaces
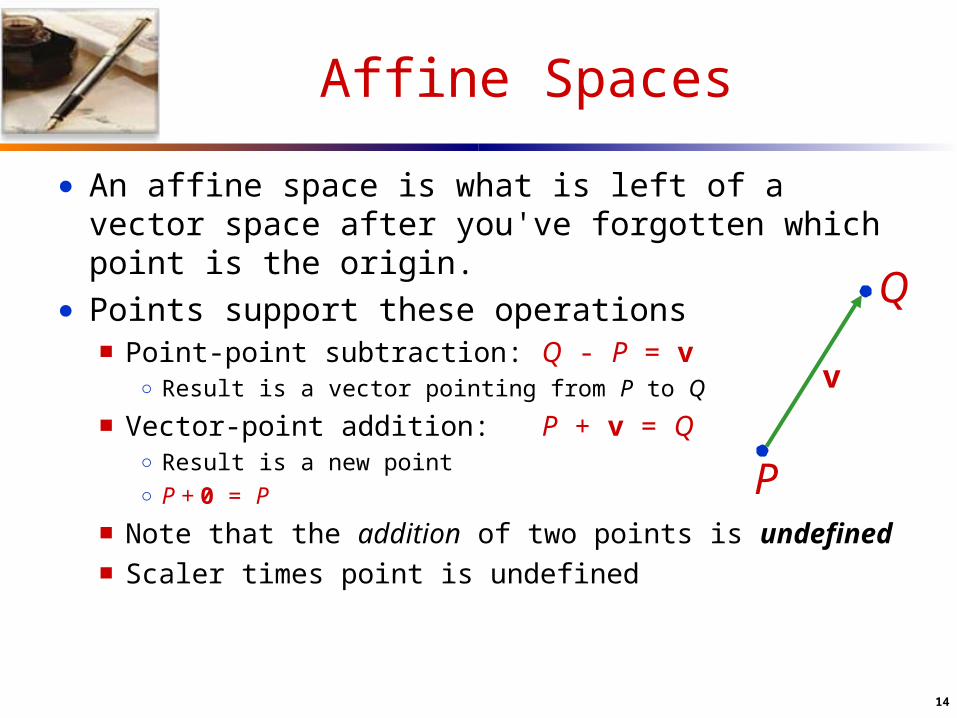
● An affine space is what is left of a vector space after you've forgotten which point is the origin.
● Points support these operations■ Point-point subtraction: Q - P = v
○ Result is a vector pointing from P to Q
■ Vector-point addition: P + v = Q○ Result is a new point○ P + 0 = P
■ Note that the addition of two points is undefined■ Scaler times point is undefined
P
Q
v
15
Affine Spaces
● Points, like vectors, can be expressed in coordinates■ The definition uses an affine combination■ Net effect is same: expressing a point in terms of a basis
● Thus the common practice of representing points as vectors with coordinates
● Be careful to avoid nonsensical operations■ Point + point■ Scalar * point
16
Affine Lines: An Aside
● Parametric representation of a line with a direction vector d and a point P1 on the line:
P() = Porigin + d
● Restricting 0 produces a ray in the direction of the vector d
● Setting d to P - Q and restricting 1 0 produces a line segment between P and Q
17
Dot Product
● The dot product or, more generally, inner product of two vectors is a scalar:
v1 • v2 = x1x2 + y1y2 + z1z2 (in 3D)
● Useful for many purposes■ Computing the length of a vector: length(v) = sqrt(v • v)
■ Normalizing a vector, making it unit-length■ Computing the angle between two vectors:
u • v = |u| |v| cos(θ)
■ Checking two vectors for orthogonality■ Projecting one vector onto another
θu
v

18
Cross Product
● The cross product or vector product of two vectors is a vector:
● v1xv2 = u|v1||v2|sin ● Cross product of two vectors is orthogonal to both● Right-hand rule dictates direction of cross product● Cross product is handy for finding surface orientation
■ Lighting■ Visibility
● Not Associative● Distributive
1221
1221
1221
21 )(
y x y x
z x z x
z y z y
vv
19
Linear Transformations
● A linear transformation: ■ Maps one vector to another■ Preserves linear combinations
● Thus behavior of linear transformation is completely determined by what it does to a basis
● Turns out any linear transform can be represented by a matrix
20
Matrices
● By convention, matrix element Mrc is located at row r and column c:
● By convention (mathematical) , vectors are columns:
mnm2m1
2n2221
1n1211
MMM
MMM
MMM
M
3
2
v
v
v
v
1
21
Matrices
● Matrix-vector multiplication applies a linear transformation to a vector:
● Recall how to do matrix multiplication● Dot product● Cross product is the determinant of a matrix
z
y
x
v
v
v
MMM
MMM
MMM
vM
333231
232221
131211
22
Matrices
● Matrix multiplication is NOT commutative● Matrix multiplication is associative● Linear transformations can be represented as matrix
multiplications● When we talk about transformations, we will see that
all linear transformations can be represented by matrices
23
Matrix Transformations
● A sequence or composition of linear transformations corresponds to the product of the corresponding matrices■ Note: the matrices to the right affect vector first■ Note: order of matrices matters!
● The identity matrix I has no effect in multiplication● Some (not all) matrices have an inverse:
vvMM
M
1
0)det(
