mathieu stability in the dynamics of tlp's … stability in the dynamics of tlp's tethers...
TRANSCRIPT
MATHIEU STABILITY IN THE DYNAMICS OF TLP's TETHERSCONSIDERING VARIABLE TENSION ALONG THE LENGTH
Simos, A.M.' & Pesce, C.P.
Escola Politecnica, USP, CP61548, S.P., Brazil* Dep. of Naval Architecture and Ocean Engineering / FAPESP scholarship^ Dep. of Mechanical Engineering
Abstract — The trend in applying TLPs (Tension Leg Platforms) in deepwaters and the necessity of reduction of the usually high values of pretensionmake the effect of variable tension in tethers dynamics more significant. Thiswork presents a dynamic modeling of TLP's tethers considering the tensionvariation along the length due to the submerged weigh.
The modal analysis considers a linear cable equation for tether modelingsubmitted to tension which varies linearly along its length. The standardSturm-Liouville problem is solved by transforming it into a modified Besselequation form. A Mathieu stability analysis is then performed so one canobtain the amplitudes of tethers vibrations and verify possibly unstablemodes.
The results are compared to those obtained by the model proposed by Patel'which considers constant tension along the length of the tethers, showing thatthe submerged weigh effect is indeed significant.
INTRODUCTION
As the use of TLP platforms moves in the direction of deeper waters theeconomic viability of their projects has been leading to huge platforms withhigh production levels. These characteristics emphasise the necessity ofreduction of the usually high values of static pretension in order to allowhigher values of payload and, consequently, enhancing the system'sproduction. The operation in deeper waters with reduced pretensions makes
Transactions on the Built Environment vol 29, © 1997 WIT Press, www.witpress.com, ISSN 1743-3509

176 Offshore Engineering
the effects of tension variation along the tethers more relevant in theirdynamics. The investigation of such effects represents the main objective ofthe present work.
An analysis on the effects of pretension reduction was previously made byPatel*. The dynamic model of the tethers lateral vibration considered in hiswork assumes constant value of static tension along the length of the tethers.The excitation comes from the linear heave motion of the hull induced by anharmonic wave. The tether's dynamic is thus represented by a non-linearMathieu equation. Due to the consideration of constant tension along thetether's length, the modal forms of vibration are harmonic in his model.
The global dynamics representation of the lateral motion governed by aparametric Mathieu equation derived in Patel's work is also assumed here: alinear cable equation forced by harmonically varying dynamic tension andlimited in amplitude due to viscous damping consideration. However, thestatic tension linear variation along the tether's length due to its submergedweigh is here considered leading to a standard Sturm-Liouvilie problemwhich is analytically treated and solved in terms of modified BesseI equation.Therefore the modal forms in this model result non harmonic and are given interms ofBessel functions^.
Both models described above are then applied to determine the dynamicresponse of the tethers of two real TLP platforms: the Hutton TLP (exampleconsidered in Patel's work) and the Auger platform. The former platformwas the first TLP designed and is operating in the Gulf of Mexico in a verylow water depth. The Auger TLP, instead, is a more recent design andfollows the modern trends. In order to simplify comparison, the mainnomenclature used in the present text follows the one presented in Patel'swork.
THE DYNAMIC MODEL
The dynamic model for the tether lateral vibration adopts the mainhypotheses described bellow:
• linear cable model, thus the tether flexural rigidity is assumed to benegligible since the element is very slender;
• static tension varying linearly along the tether's length due to theeffect of its own submerged weigh;
• dynamic tension imposed by linear heave motion induced by amonochromatic wave;
• extremities simply supported;• absence of current effects.
Transactions on the Built Environment vol 29, © 1997 WIT Press, www.witpress.com, ISSN 1743-3509

Offshore Engineering 177
The proposed global dynamic representation is based on Patel's work whichconsiders the same hypotheses mentioned above but assumes the statictension to be constant along the tether's length.
Figure 1 - Illustration of tether's dynamic model
The Dynamic EquationOnce neglected the tether's flexural rigidity, its lateral movement is governedby the following dynamic equation:
where:
M: tether's mass per unit length (physical plus added masses);By: quadratic fluid damping coefficient (viscous);T(x): total tension;
The total tension acting along the tether is composed by:
• the static tension (T x)), resulting from the platform pretension (P)and varying along the tether's length due to the action of itssubmerged weigh:
being:
(2)
|i: physical mass per unit length;L: tether's length.
the dynamic tension (Td(x)), imposed by the hull's first-order heavemotion induced by a monochromatic wave with frequency (CD):
Transactions on the Built Environment vol 29, © 1997 WIT Press, www.witpress.com, ISSN 1743-3509

1 78 Offshore Engineering
(3)
where:
S: wave induced tension amplitude;
leading to a total tension given by:
T(x) = f + pg(L - x) - .S'. cos(<s>0 (4)
Solution of the Eigenvalue ProblemThe dynamic equation for the tether's free lateral vibration is given by:
f - o ( 5 )a &
Assuming the lateral motion of the nth. natural mode as:
and substituting Equation (6) into Equation (1), one obtains:
f£ + ^M + «^>0 (?)\\ M MIL ^ •" J J
being:t3r.: natural frequency of the /?th. mode.
As indicated by Equation (7) the dynamic model adopted leads to a classicalSturm-Liouville problem.
By the introduction of the new variable (rj):
" = V'+ 7- (8)
and after some algebraic work, Equation (7) can be rewritten in the form(see, e.g., [6]):
(9)
8' = —— or
Transactions on the Built Environment vol 29, © 1997 WIT Press, www.witpress.com, ISSN 1743-3509

Offshore Engineering 179
The equation above is identified as a Modified Besse! Equation, being itssolution given in terms of the Bessel functions (Jo,Yo):
The constants (C C:) are determined by the consideration of appropriateboundary conditions, such as:
The resulting modal forms for the tether's dynamic model are then obtainedas:
with frequencies given by:
The values of (3,, are determined numerically as solutions of the characteristicequation:
Dynamic Solution in Terms of Natural ModesFollowing Pat el \ substituting Equation (12) into the dynamic Equation (1),applying Galerkhi's variational method (multiplying it by X,,(x) andintegrating along the tether's length) and considering the followingcoefficients:
Transactions on the Built Environment vol 29, © 1997 WIT Press, www.witpress.com, ISSN 1743-3509

180 Offshore Engineering
(15)
the dynamic Equation (I) can be expressed in the form:
with:i: dimensionless time variable (2r = cot);
The tether's dynamic is hence represented by a Mathieu parametric equationwith parameters given by:
The stability analysis to be performed can be illustrated graphically by theMathieu stability chart obtained by Patel^ (shade regions are unstable):
Transactions on the Built Environment vol 29, © 1997 WIT Press, www.witpress.com, ISSN 1743-3509

Offshore Engineering 181
0.0 20.0 40.0 50.0 80.0 100.0 120.0 140.0 160.0 130.0 200.0 220.0 240.0 260.0 28O.O
6Figure 2 - Mathieu Stability Chart up to Large Parameters
(extracted from [1])
THE BUTTON TLP EXAMPLE
The Hutton TLP^ was the first platform of its kind to operate and due to itsoriginality its design has some particularities when compared to more recentprojects. Operating in the Gulf of Mexico at a low water depth (about 150m), its tethers are subjected to a very high pretension. Data for the HuttonTLP tethers are:
Number of tethers:Length:External diameter:Thickness:Static tension per tether:
16~ 115 in
0.26m8.7 mm (estimated)
800 tonf
Considering an wave exciting period of 6.8 seconds and the relation (S/P)equal to 2/3, one obtains the parameters presented by Patel for the Huttonoperating condition (8=255;q=85). These values correspond to the tether'sfirst mode of vibration. Patel also considers a damping coefficient (c) of 0.3in his analysis. The dynamic analysis was then performed using both models(constant static tension model (Patel's) and the proposed variable statictension model) in order to obtain the phase plane and the time history for thegeneralised displacement amplitude f(t) (see Equation 6):
Transactions on the Built Environment vol 29, © 1997 WIT Press, www.witpress.com, ISSN 1743-3509

182 Offshore Engineering
Constant Static Tension Model (Patel)6 = 255;q = 85;c = 0.3
-0.05 0 0.05 0.1
f (t)
Variable Static Tension Model
-0.05 0 0.05 0.1
f (t)
Figure 3 - Generalised Displacement Amplitude for the Hutton TLP Tethers
Considerations About the Results Obtained for Hutton TLPAs can be observed in figure 3, the results obtained by the two distinctdynamic models are in this case indistinguishable. Nevertheless, this factwas already expected since the static tension for each tether of Hutton TLPis much greater than its submerged weigh. Considering the tension variationcaused by such a weigh is, of course, of no relevance. It must beemphasised, however, that the Hutton TLP characteristics are veryparticular, mainly because the low water depth and high value of pretension.The present tendencies of oil exploitation are clearly leading to the use ofTLPs in deeper waters. The reduction of pretension values is also desired inorder to increase the payload and thus adequate the economic viability ofsuch kind of project. Those tendencies may be verified observing the TLPsdesigned more recently. Besides, as already concluded in Patel's work, thedeep water condition is critical for the tether's dynamic behaviour.Therefore the Hutton TLP is not an adequate example either to verify theinfluence of tension variation along the tether or to extract conclusionsabout its dynamics in deeper waters.
Transactions on the Built Environment vol 29, © 1997 WIT Press, www.witpress.com, ISSN 1743-3509
Offshore Engineering 183
THE AUGER TLP EXAMPLE
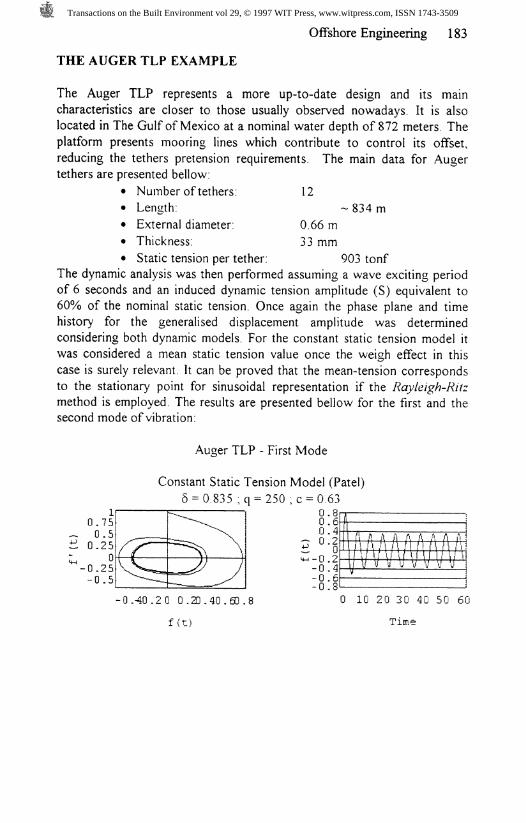
The Auger TLP represents a more up-to-date design and its maincharacteristics are closer to those usually observed nowadays. It is alsolocated in The Gulf of Mexico at a nominal water depth of 872 meters Theplatform presents mooring lines which contribute to control its offset,reducing the tethers pretension requirements. The main data for Augertethers are presented bellow:
• Number of tethers: 12• Length: - 834 m• External diameter: 0.66 m• Thickness: 33 mm• Static tension per tether: 903 tonf
The dynamic analysis was then performed assuming a wave exciting periodof 6 seconds and an induced dynamic tension amplitude (S) equivalent to60% of the nominal static tension. Once again the phase plane and timehistory for the generalised displacement amplitude was determinedconsidering both dynamic models. For the constant static tension model itwas considered a mean static tension value once the weigh effect in thiscase is surely relevant. It can be proved that the mean-tension correspondsto the stationary point for sinusoidal representation if the Rayleigh-Ritzmethod is employed. The results are presented bellow for the first and thesecond mode of vibration:
Auger TLP - First Mode
Constant Static Tension Model (Patel)6 = 0.835 ; q = 250 ;c = 0.63
f (t)
II
I!
IDOOO OOOC . O.6
.4
.20.2.4.6q
f> 1f
f'i A A A A A A f\ fiM ' \ M/ n ^ "<I \/ \ i \ ' \ \i ' I-' ^f V V U U V V V V ;J
-0.40.20 0 .20.40.60 .8
f (t)
0 10 20 30 40 50 60
Time
Transactions on the Built Environment vol 29, © 1997 WIT Press, www.witpress.com, ISSN 1743-3509

184 Offshore Engineering
Variable Static Tension Model
5," = 0.965 ; q%* = 270 ;ci* = 0.65
-0.40.20 0.20.40.6
f (t)
0 10 20 30 40 50 60
TimeFigure 4 - Generalised Displacement Amplitude for the Auger TLP Tethers
- First Mode
Auger TLP - Second Mode
Constant Static Tension Model (Patel)5 = 3.341 ; q= 1.002 ; c = 0.634
-0.4-0.2 0 0.2 0.4
f (t)
10 20 30 40 50 60
Time
Transactions on the Built Environment vol 29, © 1997 WIT Press, www.witpress.com, ISSN 1743-3509

Offshore Engineering 185
Variable Static Tension Model5," = 3.861 ; q,* = 1.082 ; c,* = 0.630
0.4_ 0.2ii 0"-0.2-0.4
0 10 20 30 40 50 60
Time
Figure 5 - Generalised Displacement Amplitude for the Auger TLPTethers - Second Mode
Considerations About the Results Obtained for Auger TLPThe results above presented clearly demonstrate that, in this case, theinfluence of tension variation along tether's length performs an importantrole in its dynamics. The Auger's operation condition leads to an unstableresponse for tether's first mode of vibration, as shown in figure 4. Theamplitude of generalised lateral displacement of 0.5 meters obtainedconsidering tension variation is approximately 30% greater than the onecalculated by the constant static tension model. The influence of submergedweigh can also be verified in the second mode case although with minorrelevance, since the response in this case is stable and the amplitudedecreases very fast.
The analysis of Auger's tethers outlines some remarkable featuresconcerning tethers dynamics in deep waters. A first aspect that must bepointed out is that for deep waters very small values of the parameters(5) and (q) control the dynamics of tether's lateral vibration. As the tether'slength increases, the operation point in the Mathieu stability chart (figure 2)tends to the region near its origin. As can be observed form this figure, thedynamic behaviour is very sensitive to small variations in the parameters (6)and (q), in this region. The deep water case is then critical concerningtethers dynamics, not only due to the common sense fact of being larger thevibration amplitudes as larger is the span, but also because its inherentresponse instability. Another interesting feature tjiat results from thisanalysis is that the higher modes of vibrations tend to be more stable oncethe parameter (6) increases more rapidly than the parameter (q) with themodal number. This indication should be further investigated since highermodes have significant importance in the coupled platform-tethersdynamics.
Transactions on the Built Environment vol 29, © 1997 WIT Press, www.witpress.com, ISSN 1743-3509
186 Offshore Engineering
CONCLUSIONS
A dynamic model for TLP tethers lateral vibration considering the statictension variation along the length was derived. The global equation isgoverned by a parametric Mathieu equation and the natural modes of lateralvibration are obtained in terms of Bessel functions. A comparison betweenthe proposed dynamic model and the one presented by Patel* wasperformed.
The examples analysed show that tension variation plays an important roleand its consideration is indeed necessary as the water depth increases andthe usually high values of pretension are aimed to be reduced. This fact isstill emphasised since the deep water TLP's design face critical conditionsin tethers dynamics, as demonstrated. More accurate results are thenrequested in this case and the static tension variation assumption implies notonly in more accurate amplitudes of vibration but also in a more precisestability analysis for each natural mode of vibration.
ACKNOWLEDGEMENTS
This work was supported by FAPESP - The State of Sao Paulo ResearchFoundation.
REFERENCES
[l]Patel, M.H. & Park, H.I., "Dynamics of Tension Leg Platform Tethers atLow Tension. Part I - Mathieu Stability at Large Parameters", MarineStructures 4(3), pp.257-273, 1991.
[2]Tetlow, J. & Leece, M, "Mutton TLP Mooring System", OTC 4428(1982).
[3]Mercier, J.A., Leverette, S.J. & Bliult, A.L., "Evaluation of Hutton TLPResponse to Environmental Loads", OTC 4429 (1982).
[4]Lohr, C.J. & Bo wen, K.G., "Design, Fabrication and Installation ofAuger LMS and Tendons", OTC 7622 (1994).
[5]Bender, C.M & Orzag, S., "Advanced Mathematical Methods forScientists and Engineers", McGraw-Hill, New York, 1978.
[6]Bowman, F , "Introduction to Bessel Functions", Dover, New York,1958.
Transactions on the Built Environment vol 29, © 1997 WIT Press, www.witpress.com, ISSN 1743-3509