matlab tool for evaluating the symmetry of the forehead in ... · pdf file1 abstract...
TRANSCRIPT
MATLAB tool for evaluating the symmetry of the forehead in patients
with unicoronal synostosis before and after operation.
Master of Science Thesis in Radiation Physics
Author: Annelie Lindström
1/23/2011
Supervisors: Peter Bernhardt, Lars Kölby and Jacob Heydorn-Lagerlöf
DEPARTMENT OF RADIATION PHYSICS
UNIVERSITY OF GOTHENBURG GOTHENBURG, SWEDEN

1
Abstract Unicoronal synostosis is a condition where one of the coronal sutures, in an infant’s skull,
has prematurely fused. This will result in a deformed skull where the forehead is flattened on the ipsilateral side and bulges outwards on the contralateral side.
The craniofacial unit at the Department of Plastic Surgery at Sahlgrenska University has
continuously improved craniofacial surgery over the years. The aim of this project was to
develop a MATLAB tool that evaluates the symmetry of the forehead in patients with
unicoronal synostosis before and after treatment. The program will be used as a quantitative
measure in a study for craniofacial surgery.
The program evaluates CT images and cephalometry images of the skull. The cranium is
segmented leaving only the uttermost edge of the cranium and the symmetry between the
left and right side of the forehead is evaluated. By calculating the symmetry of the forehead
before and after operation a quantitative measure of the outcome is achieved, and the
treatment can be evaluated.
The symmetry of symmetrical phantoms, both circular and elliptical, has been evaluated and
the result shows that it is completely symmetrical. 15 pre-operative images and 15 post-
operative images have also been evaluated and it is shown that the relative standard
deviation increases for a more symmetrical cranium. The results achieved for the CT images
have a lower relative standard deviation than the results achieved for the cephalometry
images. The success of the operations has been evaluated with two different equations. One
method calculates the absolute change and the other calculates the relative change. The
relative change is demonstrated to be a better evaluation of the operation.
2
Table of Contents 1 Introduction ............................................................................................................................ 4
2 Theory ..................................................................................................................................... 5
2.1 Digital image ..................................................................................................................... 5
2.2 Digital image processing ................................................................................................... 6
2.2.1 Histogram processing ................................................................................................ 6
2.2.2 Spatial filtering .......................................................................................................... 7
2.2.3 Segmentation ............................................................................................................ 8
2.3 MATLAB ............................................................................................................................ 8
3 Method .................................................................................................................................... 8
3.1 CT images ....................................................................................................................... 10
3.1.1 Definition of center-point, end-point, and unfused side ........................................ 11
3.1.2 Segmentation .......................................................................................................... 11
3.2 Cephalometry images ..................................................................................................... 13
3.2.1 Contrast enhancement ............................................................................................ 13
3.2.2 Definition of center-point, end-point, and unfused side ........................................ 13
3.2.3 Interactive definition of the cranium ...................................................................... 13
3.3 Dividing the skull into two parts, one left and one right ............................................... 13
3.4 Calculation of the symmetry between the two sides .................................................... 15
3.5 Evaluation of the program ............................................................................................. 17
3.5.1 Symmetry evaluation .............................................................................................. 17
3.5.2 Test on symmetrical phantoms ............................................................................... 18
3.5.3 The certainty of the program .................................................................................. 19
4 Results ................................................................................................................................... 19
4.1 Symmetry evaluation ..................................................................................................... 19
4.2 Test on symmetrical phantoms ...................................................................................... 19
4.3 The certainty of the program ......................................................................................... 20
5 Discussion .............................................................................................................................. 22
6 Conclusions ........................................................................................................................... 25
Acknowledgements ................................................................................................................. 26
References................................................................................................................................ 27

3
Appendix .................................................................................................................................. 28
Appendix I ............................................................................................................................. 28
Appendix II ............................................................................................................................ 35

4
1 Introduction The bones in an infant’s skull are joined together by six sutures, a type of fibrous joint [1].
These sutures make it possible for the skull to compress when passing through the birth
canal. They also allow the skull to expand when the brain grows. The infant’s skull grows
rapidly and at one year of age the brain has tripled its volume. The rapid growth requires the
cranium to be able to expand. As the child gets older, and the growth of the brain is
decreased, the sutures will fuse one by one.
In a condition called craniofacial synostosis the sutures can fuse prematurely, days or
months before birth. For these children the skull won’t be able to grow at the affected
suture. To compensate for the prematurely fused suture the unaffected sutures will grow in
a different pattern compared to a normal skull, resulting in an abnormal shape. Depending
on which suture has been fused the shape of the skull will have special features. Usually one
suture is closed too early but sometimes several sutures can be closed simultaneously.
The coronal suture separates the parietal and the frontal bones (Figure 1). For patients with
unicoronal synostosis one of the coronals is prematurely closed [2] [3]. Unicoronal synostosis
is characterized by an asymmetric forehead. On the ipsilateral side, the side where the
suture has fused, the forehead is flattened and on the contralateral side the forehead bulge
outwards. The face is also affected due to the abnormal shape of the forehead. The eye and
the eyebrow may be pushed downward by the bulging forehead [4].
Figure 1. Image of the cranium and its sutures where the arrow points to the coronal suture [5].

5
The craniofacial unit at the Department of Plastic Surgery at Sahlgrenska University has a
large material of patients with synostosis. At the department many new methods in
craniofacial surgery have been developed over the years. An example of a new treatment
modality is stainless steel wires for implantation, which was introduced by the Gothenburg
craniofacial team eleven years ago. These wires affect and guide the dynamic growth of the
infant’s skull. When the growth of the brain is directed and affected by the wires the skull
shape is forced into normality.
Today the result of an operation is evaluated by studying the patient’s skull and at the x-ray
images of the patient. However, this is a result that will depend on the evaluator. Therefore
a quantitative measure of the result, independent of the viewer, is preferable. A quantitative
measure of the symmetry of the skull would make it possible to compare and evaluate, for
example, different surgical procedures.
The aim of this project was to develop a MATLAB tool that calculates the symmetry of the
forehead in patients with unicoronal synostosis before and after treatment. This should be
done by comparing the left and the right side of the forehead in both computed tomography
(CT) and cephalometry images. The program will be used as a quantitative measure in a
study where two different treatments are compared.
2 Theory
2.1 Digital image An image can be defined as a two-dimensional function f(x,y), where x and y are spatial
coordinates. The intensity or gray level at the point (x,y) is the amplitude of f. It is a positive
number whose value is determined by the source of the image. A digital image make up of a
finite number of elements, each element has a particular location determined by the
coordinates x and y, and a finite value. These elements are called picture elements also
known as pixels.
A digital image is stored as a two-dimensional array, a matrix, where the columns and rows
corresponds to the spatial coordinates x and y respectively [6]. A digital image of size M x N
can be represented as shown in equation 1.
( ) [ ( ) ( )
( ) ( )] (1)

6
2.2 Digital image processing Digital image processing refers to processing digital images with a computer using
mathematical algorithms. The basics of digital image processing are to enhance an image so
that the result suits a specific application more than the original. Spatial processing refers to
direct manipulation of the pixels in the image. There are two main categories, intensity
transformation and filtering. These processes are methods whose inputs and outputs are
images. There are other processes, like segmentation, where the inputs are images and the
outputs are constituents extracted from those images.
2.2.1 Histogram processing The basis of a numerous spatial domain processing techniques is histogram processing. It can
be used to enhance the contrast and other image processing applications, such as image
compression and segmentation.
A histogram of a digital image is a bar graph of the distribution of all gray levels. The x-axis
shows the number of gray levels, and the y-axis shows the number of pixels with a particular
gray level (figure 2). The histogram is often normalized by dividing each of its components by
the total number of pixels.
Histogram equalization is a histogram processing technique where a transformation function
is automatically determined. The transformation function maps one pixel value to another
Figure 2. A histogram of a digital image where the x-axis shows the number of gray levels, and the y-axis shows the number of pixels with a special gray level.

7
pixel value so that the output image produced has a uniform histogram with a predefined
number of discrete gray levels (figure 3). Histogram equalization can be performed on the
entire image as well as small regions in the image. For small regions, the histogram of the
points in the neighborhood is computed and histogram equalization is performed for each
location. This enhances details over small areas in the image which may not be enhanced in
a global process where the number of pixels in these areas may have negligible influence.
Another way to process a histogram is to map intensity values in a manually defined range in
the input image to intensity values in a manually defined range in the output image. The
relationship between these ranges can be specified.
Both processing techniques can be used to enhance the contrast in an image. Histogram
equalization is simple to implement but it is not always the best approach to base the
enhancement on a uniform histogram. Instead of enhancing the desirable details in the
image the noise might be enhanced.
2.2.2 Spatial filtering Spatial filtering operates by working in a neighborhood of every pixel in an image and
performs a predefined operation on the pixel encompassed by the neighborhood. The
neighborhood is a matrix much smaller than the image. Filtering creates a new pixel on the
same location as the pixel in the center of the neighborhood. The filter moves from pixel to
pixel so that the center of the filter operates on each pixel in the input image. The value of
Figure 3. The equalized histogram after performing histogram equalization on the histogram in figure 2. The histogram has 64 discrete gray levels.
8
the new pixel depends on the filtering operation and the size of the filter. The operations
can be linear or nonlinear.
An output image that has been filtered with a linear filter is a linear function of the input
image. Each pixel, in the output image, is a weighted sum of the neighborhood pixels
encompassed by the filter in the input image. Examples of linear filters are smoothing and
sharpening filters.
A nonlinear filter ranks the pixels contained in the area encompassed by the filter. An
example is a median filter. The median filter calculates the median value of the intensity in
the pixels encompassed in the filter area and replaces the intensity in the center pixel with
this value. The size of the filter decides how many neighborhood pixels are encompassed.
Median filters are effective for noise-reduction, particularly on so called salt-and-pepper
noise.
2.2.3 Segmentation Segmentation partitions the image into its constituent parts. The segmentation algorithms
are based on basic properties of intensity values like discontinuity and similarity.
Discontinuity algorithms partitions the image based on rapid changes in the intensity values.
This is used for, among other things, identifying edges in the image. The assumption is that
the intensity values of the boundaries and the background differ sufficiently from each
other. In a low-contrast image it can be difficult to identify boundaries.
The second category, similarity, uses a set of criteria that is predefined to partition the image
into regions that are similar according to the criterions. Examples of this approach are
thresholding, region growing, and region splitting and merging.
2.3 MATLAB MATrix LABoratory, MATLAB, is a high-performance technical computing tool optimized for
matrix and vector calculations [7]. It is designed for developing algorithms, visualizing and
analyzing data, and numeric computation. MATLAB can be used in a wide range of
applications, for example signal, image and video processing, control systems, test and
measurement, technical computing, mechatronics, financial modeling and analysis, and
computational biology.
3 Method In this project MATLAB Version 7.11.0.584 (2010b) was used to create a program for
evaluating the symmetry of the forehead. The created program is designed for CT and
cephalometry images in jpg-format.

9
A flow-chart can easily illustrate the overall steps in the program (figure 4). An image is
loaded by choosing the file containing the particular image. As can be seen in figure 5, CT
and cephalometry images have different properties. Because of that they have to be
processed differently.
Figure 4. The flow-chart above illustrates the overall steps in the program.

10
Figure 5. . Illustration of the different properties of a CT image (left), and a cephalometry image (right).
3.1 CT images For the automatic segmentation, the CT images needs to have good contrast. Bone needs to
have an intensity value over 250 in the gray-scale format. It is also important that there are
no bigger open areas in the edge of the cranium (figure 6). The contrast can be enhanced by
changing the window-level in any CT-image evaluation program before they are saved as jpg-
files. Changing the window level will also decrease, or increase, the size of the open areas in
the edge of the cranium.
Figure 6. Illustration of an open area that is too big for the segmentation to be automatic.

11
In the program a median filter of the size 4 x 4 is used to overcome the problem with small
open areas in the edge of the cranium.
3.1.1 Definition of center-point, end-point, and unfused side To be able to compare the left and the right side, of the forehead, a center-point has to be
defined. This is done by hand. The point is created by clicking on the spot where the user
wants to divide the two sides. The coordinates are saved and used later in the program.
The user also has to define how much of the skull that is of interest for the comparison, the
end-point. The point is defined interactively, in the same way as the center-point, by clicking
on the cranium where the comparison should end. This point also defines the unfused side.
3.1.2 Segmentation The program segments the image to get the uttermost edge of the cranium. The
segmentation is done by threshold the intensity values in the image. Pixel values below 105
will get the intensity value zero, pixel values above 250 will get the intensity value one, and
pixel values between 105 and 250 are mapped to values between zero and one. This
improves the contrast in the image. Bone gets the value one and soft tissue gets an intensity
value closer to zero.
The image format is converted from gray-scale to binary. A binary image has two discrete
intensity values, zero and one. The output image replaces all pixels in the input image with
intensities greater than graythresh with the intensity value one, and replaces all other pixels
with the intensity value zero .Graythresh uses Otsu’s method to automatically determine a
threshold that suits that gray-scale image best. The value depends on the histogram
belonging to the input image [8].
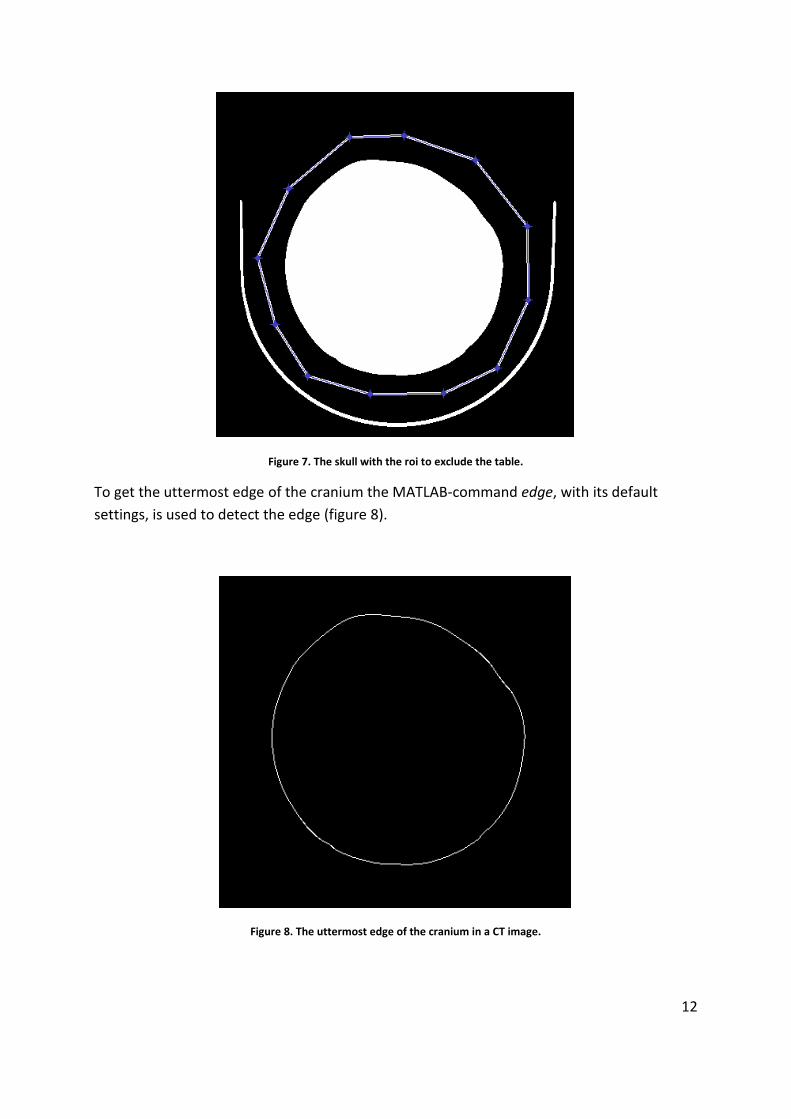
When the image format has been converted, the MATLAB-command imfill is used to fill the
area that is enclosed by the cranium. The output image contains the cranium and the filled
area enclosed by the cranium, and sometimes parts of the table the patient lays on when the
image is taken. To exclude the table a ROI is placed manually around the skull (figure 7).
12
Figure 7. The skull with the roi to exclude the table.
To get the uttermost edge of the cranium the MATLAB-command edge, with its default
settings, is used to detect the edge (figure 8).
Figure 8. The uttermost edge of the cranium in a CT image.

13
3.2 Cephalometry images The cephalometry images are originally analogous images that have been digitalized by
taking pictures of them with a digital camera. The images are resized with a scale factor from
size M x N to size 400 x (N scale factor). The value of the scale factor depends on M. The
image needs to be resized because the original matrix is too large for the memory on the
computer.
3.2.1 Contrast enhancement In many of the cephalometry images there are very small differences in the intensity values
between the cranium and the background. The MATLAB-command adapthisteq, using its
default settings, enhances the contrast in the image by performing local histogram
equalization.
3.2.2 Definition of center-point, end-point, and unfused side Definition of center-point, end-point, and unfused side are performed in the same way as in
section 3.1.1.
3.2.3 Interactive definition of the cranium The cranium cannot be segmented automatically by the program due to poor contrast.
Therefore, it has to be done by hand. By clicking along the edge of the cranium points are
created, and its coordinates are saved in a vector. A MATLAB-command for creating lines is
recalling the vector and creating lines between the locations where the points are. The
points cannot be placed further apart than eight pixels, if they are, the program deletes the
latest point and the user has to click closer to the previous point.
3.3 Dividing the skull into two parts, one left and one right The coordinates from the defined center-point are used to divide the skull into two parts,
one left and one right side. The two parts are handled as two images. The unfused side is
also cropped at the point that defines how much of the skull that is of interest for the
comparison, the end-point (figure 9).

14
Figure 9. The segmented skull is divided into two parts, the fused side (left) and the unfused side (right). The unfused side is cropped at the end-point.
The image containing the left part is mirrored in a left-right direction, about a vertical axis.
To be able to perform the calculations the starting point of the two curves representing the
uttermost edge of the cranium, has to start in the middle of the matrix. The matrices should
also have the same size. This is done by adding matrices of zeros so that the output images
have the same size and the starting point is in the center of the matrix. The output matrix
contains the input image H and the matrices I and J (figure 10). I and J are zero matrices
where J has the same size as H, and I is of the size d x c. c is determined by calculating a-b.
The distances b and a are calculated by finding the coordinates of o in the input image H.
Figure 10. Schematic image of how zero matrices are added to get the center-point, o, in the middle. H is the input matrix, and I and J are matrices of zeros.
15
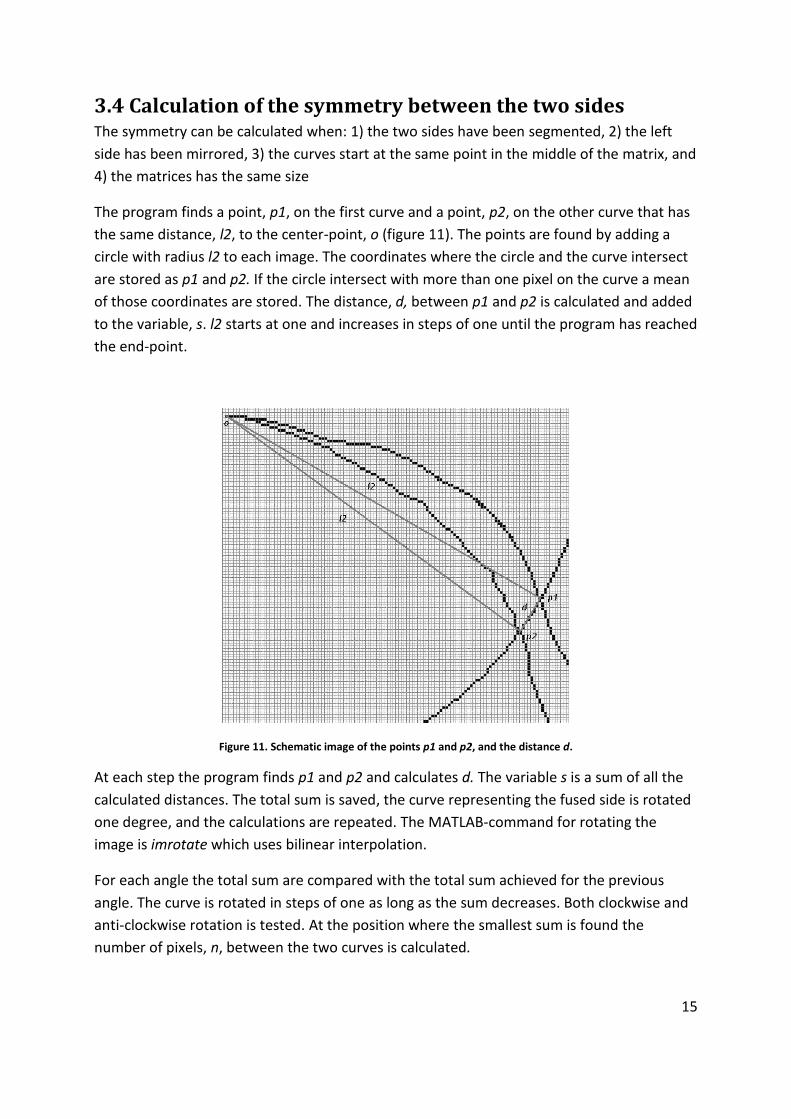
3.4 Calculation of the symmetry between the two sides The symmetry can be calculated when: 1) the two sides have been segmented, 2) the left
side has been mirrored, 3) the curves start at the same point in the middle of the matrix, and
4) the matrices has the same size
The program finds a point, p1, on the first curve and a point, p2, on the other curve that has
the same distance, l2, to the center-point, o (figure 11). The points are found by adding a
circle with radius l2 to each image. The coordinates where the circle and the curve intersect
are stored as p1 and p2. If the circle intersect with more than one pixel on the curve a mean
of those coordinates are stored. The distance, d, between p1 and p2 is calculated and added
to the variable, s. l2 starts at one and increases in steps of one until the program has reached
the end-point.
Figure 11. Schematic image of the points p1 and p2, and the distance d.
At each step the program finds p1 and p2 and calculates d. The variable s is a sum of all the
calculated distances. The total sum is saved, the curve representing the fused side is rotated
one degree, and the calculations are repeated. The MATLAB-command for rotating the
image is imrotate which uses bilinear interpolation.
For each angle the total sum are compared with the total sum achieved for the previous
angle. The curve is rotated in steps of one as long as the sum decreases. Both clockwise and
anti-clockwise rotation is tested. At the position where the smallest sum is found the
number of pixels, n, between the two curves is calculated.

16
If the left and the right side of the forehead are symmetrical n will be zero. The more
unsymmetrical the sides are the bigger the value is. The value does not only depend on the
symmetry but also the size of the head and the size of the pixels. To be able to compare the
symmetry this value has to be independent of these two components. It is therefore divided
by the number of pixels in the area denoted K which also depends on the size of the head
and the size of the pixels (figure 12). The normalized value is called the symmetry ratio, N. N
is multiplied with 1000 so that the numbers won’t be so small (equation 2).
(2)
Two methods, relative change (equation 3) and absolute change (equation 4), was tested as
an evaluation of how well the surgical operation has succeeded.
(3)
Figure 12. The gray area represent the area K .The area K is expressed in pixels and is used to normalize the result. The point p has the same distance, l2, to the center-point, o, as the end-point.

17
is the symmetry ratio for the pre-operative image, and is the symmetry
ratio for the post-operative image for the same patient. The closer C gets to one the better
the operation has succeeded. C can also have a negative value which shows that the
forehead is more asymmetrical after the operation.
(4)
The bigger B is the better the operation has succeeded. As for C, a negative value shows that
the forehead is more asymmetrical after the operation.
The MATLAB code is found in appendix I and a user manual is found in appendix II.
3.5 Evaluation of the program The program has been run several times to evaluate the program and see how reliable the
results are.
3.5.1 Symmetry evaluation The main aim for the program is to calculate the symmetry of the left and the right side of
the forehead. It should give a lower value for a more symmetrical forehead. The symmetry
ratio, N, was calculated for two images where it can be seen that one of the foreheads is
more symmetrical than the other (figure 13). The center- and end-point was placed at the
same structures in both images.
Figure 13. Two images where it can be seen that the forehead in the left image is more asymmetrical than the forehead in the right image.

18
3.5.2 Test on symmetrical phantoms A few tests was performed on a CT image of a cylindrical phantom to see if the result is zero
when the two sides are symmetrical, and if the result is independent of the rotation of the
head when the image is taken (figure 14). The symmetry ratio for this image was calculated
ten times. At every run the center-point and the end-point was placed on different places
along the uttermost edge of the circle to simulate that the head is rotated.
Figure 14. The cylindrical phantom.
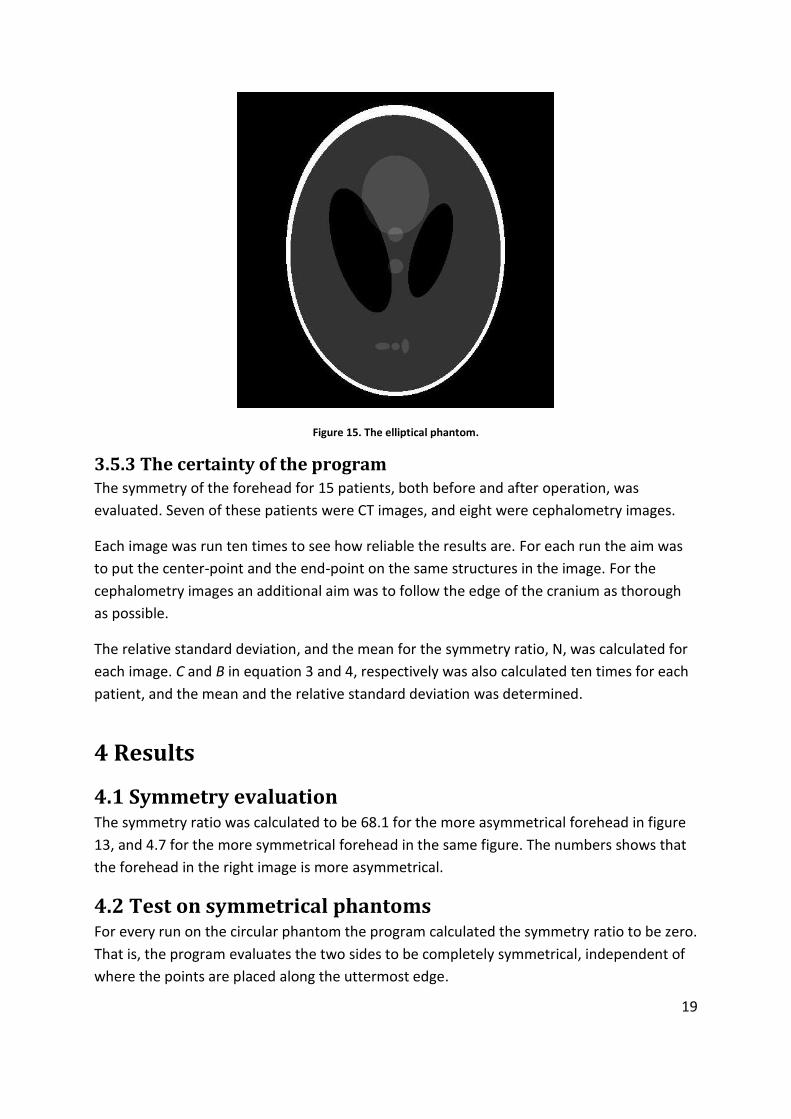
The program was also tested on an image of a symmetrical elliptical phantom (figure 15).
The image was created with the command phantom(512) in MATLAB. The image of the
phantom was run through the program twenty times. The aim for the first ten runs was to
place the center-point and the end-point at the same points on the uttermost edge of the
cranium. The aim for the last ten runs was to place the center-point at the same place for
each run and vary the places where the end-point was placed.
19
Figure 15. The elliptical phantom.
3.5.3 The certainty of the program The symmetry of the forehead for 15 patients, both before and after operation, was
evaluated. Seven of these patients were CT images, and eight were cephalometry images.
Each image was run ten times to see how reliable the results are. For each run the aim was
to put the center-point and the end-point on the same structures in the image. For the
cephalometry images an additional aim was to follow the edge of the cranium as thorough
as possible.
The relative standard deviation, and the mean for the symmetry ratio, N, was calculated for
each image. C and B in equation 3 and 4, respectively was also calculated ten times for each
patient, and the mean and the relative standard deviation was determined.
4 Results
4.1 Symmetry evaluation The symmetry ratio was calculated to be 68.1 for the more asymmetrical forehead in figure
13, and 4.7 for the more symmetrical forehead in the same figure. The numbers shows that
the forehead in the right image is more asymmetrical.
4.2 Test on symmetrical phantoms For every run on the circular phantom the program calculated the symmetry ratio to be zero.
That is, the program evaluates the two sides to be completely symmetrical, independent of
where the points are placed along the uttermost edge.
20
For all twenty runs on the elliptical phantom the program calculated the symmetry ratio to
be zero which means that the program evaluates the phantom to be completely
symmetrical.
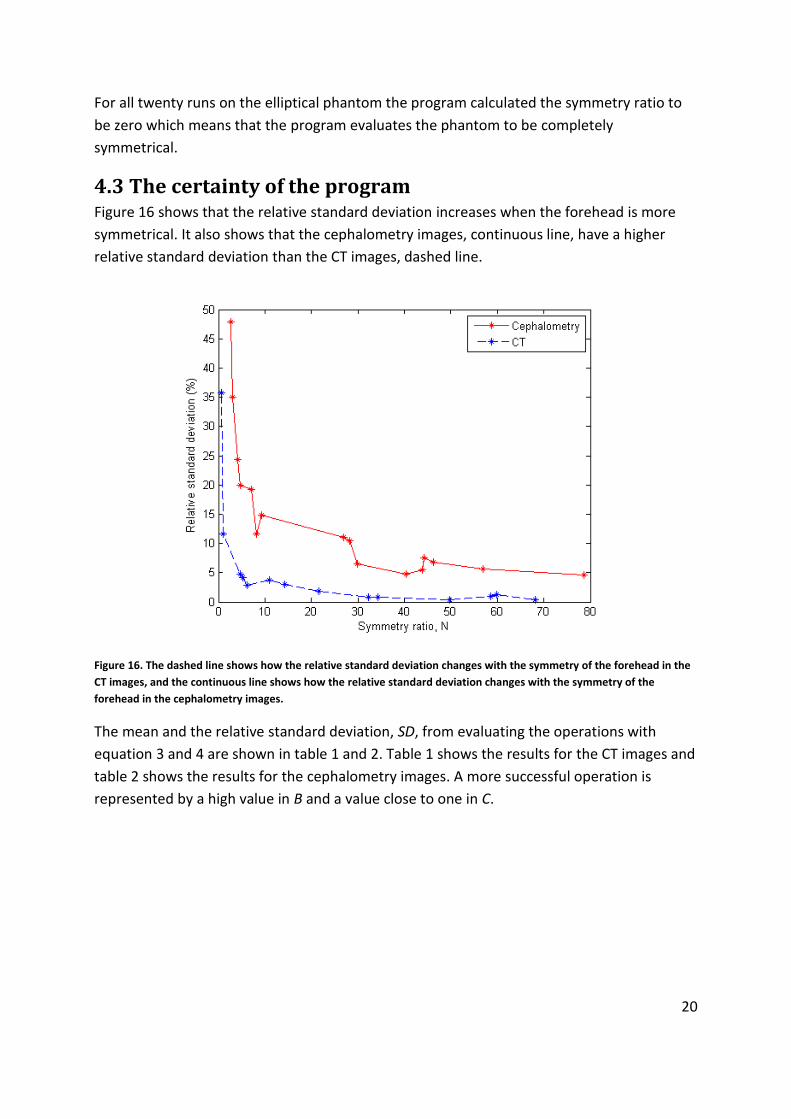
4.3 The certainty of the program Figure 16 shows that the relative standard deviation increases when the forehead is more
symmetrical. It also shows that the cephalometry images, continuous line, have a higher
relative standard deviation than the CT images, dashed line.
Figure 16. The dashed line shows how the relative standard deviation changes with the symmetry of the forehead in the
CT images, and the continuous line shows how the relative standard deviation changes with the symmetry of the
forehead in the cephalometry images.
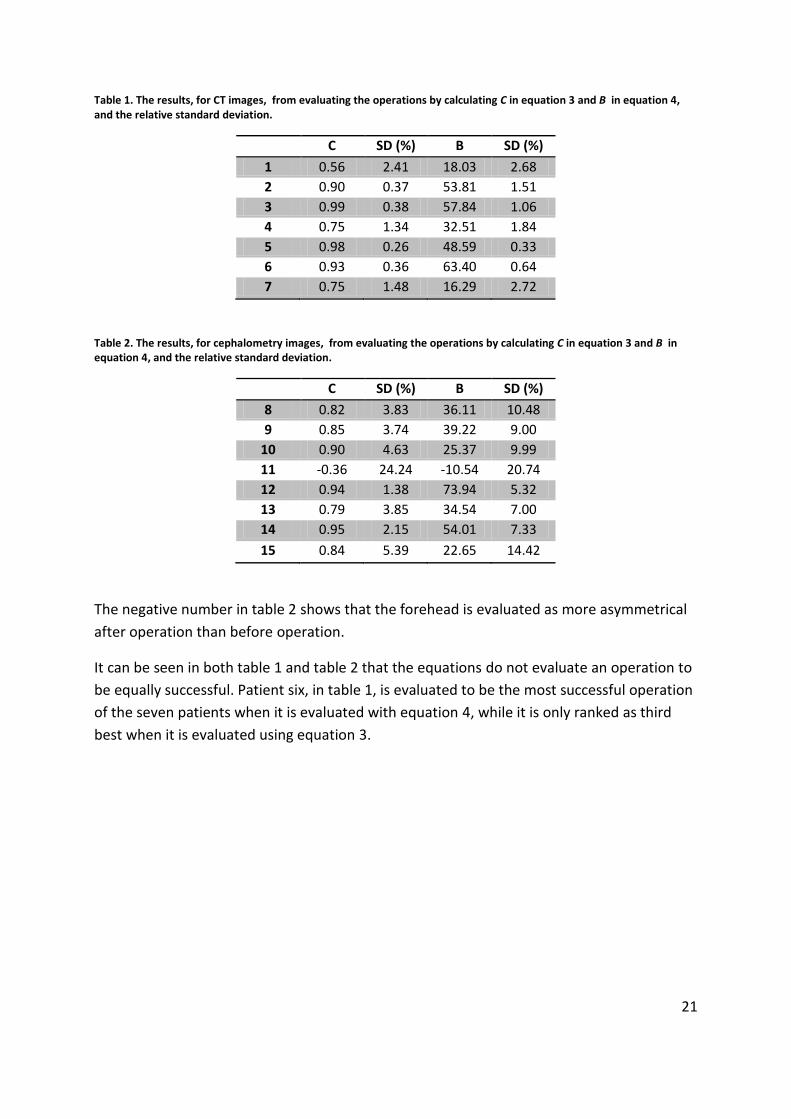
The mean and the relative standard deviation, SD, from evaluating the operations with
equation 3 and 4 are shown in table 1 and 2. Table 1 shows the results for the CT images and
table 2 shows the results for the cephalometry images. A more successful operation is
represented by a high value in B and a value close to one in C.
21
Table 1. The results, for CT images, from evaluating the operations by calculating C in equation 3 and B in equation 4, and the relative standard deviation.
C SD (%) B SD (%)
1 0.56 2.41 18.03 2.68
2 0.90 0.37 53.81 1.51
3 0.99 0.38 57.84 1.06
4 0.75 1.34 32.51 1.84
5 0.98 0.26 48.59 0.33
6 0.93 0.36 63.40 0.64
7 0.75 1.48 16.29 2.72
Table 2. The results, for cephalometry images, from evaluating the operations by calculating C in equation 3 and B in equation 4, and the relative standard deviation.
C SD (%) B SD (%)
8 0.82 3.83 36.11 10.48
9 0.85 3.74 39.22 9.00
10 0.90 4.63 25.37 9.99
11 -0.36 24.24 -10.54 20.74
12 0.94 1.38 73.94 5.32
13 0.79 3.85 34.54 7.00
14 0.95 2.15 54.01 7.33
15 0.84 5.39 22.65 14.42
The negative number in table 2 shows that the forehead is evaluated as more asymmetrical
after operation than before operation.
It can be seen in both table 1 and table 2 that the equations do not evaluate an operation to
be equally successful. Patient six, in table 1, is evaluated to be the most successful operation
of the seven patients when it is evaluated with equation 4, while it is only ranked as third
best when it is evaluated using equation 3.

22
5 Discussion Today the result of a surgical operation on a patient with unicoronal synostosis is evaluated
by studying the patient’s skull and at the x-ray images of the patient. There are no clear
criteria on how to evaluate the result. No clear criteria give an evaluation that is dependent
of the evaluator. Therefore, a program has been created as a quantitative measure to
evaluate the symmetry of the forehead in CT and cephalometry images of these patients,
and in the end to evaluate the result of the operation. The reliability of the program has
been tested on images of symmetrical phantoms and images of 15 patients before and after
the operation.
The poor contrast in some of the cephalometry images has caused some problems in
automatically detecting the uttermost edge of the cranium. In the end the solution to this
problem was to do this step manually. How the points are placed depends on the user and
will affect the result. If the time hadn’t been limited it might have been possible to come up
with a method that enhances the contrast in each image separately. This is an area which
can be further developed to improve the program. Although, in some images the contrast is
so poor that no enhancement technique would make it possible to segment the uttermost
edge. Even if the contrast could have been enhanced so that the edge could be segmented
automatically some of the pictures are in a way that the jaw is seen outside of the uttermost
edge of the cranium. The edge detected in an image like that would not be the uttermost
edge of the cranium but the jaw. If the program is developed to enhance the contrast in
each image separately, the problem with the jaw might be overcome by a combination of
automatically and manually segmentation of the edge.
As can be seen in figure 16 the relative standard deviation increase when the symmetry ratio
decrease. If the center-point and the end-point aren’t placed at exactly the same place every
time, the number of pixels between the curves representing the uttermost edge of the
cranium will vary. If the curves are more symmetrical the number of pixels between them
will be lower and this variation will have a higher impact on the result. Figure 16 also shows
that the uncertainty for the cephalometry images is considerably higher and varies more
than the uncertainty for the CT images.
As mentioned, the relative standard deviation increases when the symmetry ratio decreases.
The curve representing the cephalometry images in figure 16 shows that this is not always
the case. Although, it can be seen that despite that the values differ from what might have
been expected the variation is only a few percent, and an increase of the standard deviation
at lower values on the symmetry ratio can be distinguished. These variations can depend on
tree things; 1) there are some distinct structures where the center-point and the end-point is
placed which makes it easier to place the points at exactly the same point every time, 2) the
edge isn’t defined as thorough for each run, and 3) if there are big changes in the curves
appearances around the center-point and the end-point a variation in the placement of

23
these points will affect the result more than if the curves is more constant around the
points.
Number one and number three in the previous section might also be a reason for the
variations shown in the results for the CT-images in figure 16.
If the skull is completely symmetrical the place where the end-point is placed is less
important than the place where the center-point is placed. In that case, if the center-point is
placed in a way that the forehead is divided into two completely symmetrical parts the
placement of the end-point won’t affect the result at all. This is shown by the results from
the test on the elliptical phantom where it is calculated that the two sides are completely
symmetrical, even if the end-point is placed at different places each time.
As mentioned in the result, the two evaluation methods presented in equation 3 and 4 do
not evaluate an operation to be equally successful. An operation evaluated to be successful
by one of the equations might be evaluated to be less successful by the other. It would have
been interesting to compare the results with previous clinical evaluations but no such
evaluations have been done before. If the symmetry ratio is calculated to be 70 before
operation and 40 after operation, equation 4 evaluates the operation to be more successful
than if the symmetry ratio is calculated to be 20 before operation and 0 after operation,
even if the last operation is as successful as it can be. Equation 3 on the other hand would
evaluate the last operation to be more successful than the first. By dividing the difference
between the symmetry ratio before operation and after operation with the symmetry ratio
before operation the result will show the relative change. The relative change allows the
results for different patients to be compared even if the symmetry ratio before operation
differs between the patients. If equation 4 is used an operation where the symmetry ratio
before operation is high will be evaluated as a more successful operation. It seems that
equation 3 is preferable for evaluation of clinical materiel, since it has an upper limit of
success, i. e. C=1 means perfect operation, and C=0 means no difference, and C less than
zero means that the forehead is more asymmetrical after the surgery. As discussed above
equation 4 do not give this information in a clear way.
In the evaluation of patient 11 in table 2, it is shown that the forehead is more asymmetrical
after operation than before operation. The surgical operation has not succeeded; in fact it
has worsened the symmetry of the forehead. This is shown, as discussed in the previous
section, as a negative value in both evaluation methods. Both methods show a pretty low
difference. Therefore, small variations between each run will affect the result more which is
shown by the high relative standard deviation.
As can be seen in figure 16 the relative standard deviation is relatively high for a low value of
the symmetry ratio. When the absolute or the relative change is calculated the result is
24
dominated by the higher symmetry ratio, resulting in a relatively low relative standard
deviation.
An attempt has been made to increase the size of the image, not the matrix, so that the
edge can be distinguished more easily when it is defined manually. When this is done
something goes wrong and some parts of the edge are lost. The reason for that has not been
established.
Another thing that can be further developed in the program is the processing time. At the
time, one image takes approximately ten minutes, which might be a problem for longer
patient series. Therefore, future studies should focus on optimizing the present MATLAB
code.
25
6 Conclusions A MATLAB tool to evaluate the symmetry of the forehead in patients with unicoronal
synostosis before and after treatment has been developed for both CT and cephalometry
images which was the main aim of this project. The method is also independent of the heads
rotation at the time when the image is taken. It is shown that the results are more reliable
when CT images are evaluated than when cephalometry images are evaluated. The
recommendation for evaluating an operation is to calculate the relative change.
26
Acknowledgements I would like to take the opportunity to thank everyone who has helped me to complete this
project. First of all I would like to thank my supervisors Peter Bernhard at the Department of
Radiation Physics, and Lars Kölby at the craniofacial unit at the Department of Plastic
Surgery, for their guidance and quick answers to my endless questions. Also a big thank you
to my supervisor Jacob Heydorn-Lagerlöf at the Department of Radiation Physics for all his
help with MATLAB, and for his guidance through everything that this computing tool has to
offer.
Thanks to Patrik Sund at the Department of Radiation Physics, and Giovanni Maltese at the
craniofacial unit at the Department of Plastic Surgery for all their help along the way.
Finally, special thanks to my classmates, friends and family who has helped me, in their own
special ways, to end this project as well as pass my studies.

27
References 1. Jane, J.A. and M.S. McKisic. Craniosynostosis. Apr 2, 2010 [cited 2010 Nov 2]; Available from:
http://emedicine.medscape.com/article/248568-overview. 2. Podda, S., et al. Craniosynostosis Management. sep 17, 2008 [cited 2010 oct 21]; Available
from: http://emedicine.medscape.com/article/1281182-overview. 3. Boulet, S.L., S.A. Rasmussen, and M.A. Honein, A population-based study of craniosynostosis
in metropolitan Atlanta, 1989-2003. Am J Med Genet A, 2008. 146A(8): p. 984-991. 4. Hayward, R., The clinical management of craniosynostosis. Clinics in developmental
medicine, 0069-4835; 163. 2004, London: Cambridge UP. 5. Wikipedia, Coronal suture. 6. Gonzalez, R.C. and R.E. Woods, Digital image processing. 2008, Upper Saddle River, N.J.:
Pearson Prentice Hall. 7. MathWorks. MATLAB. [cited 2010 Nov 19]; Available from:
http://www.mathworks.com/products/matlab/description1.html.
8. MathWorks. Functional design clunkers. [cited 2010 nov 25]; Available from: http://blogs.mathworks.com/steve/2009/08/31/functional-design-clunkers/.
28
Appendix
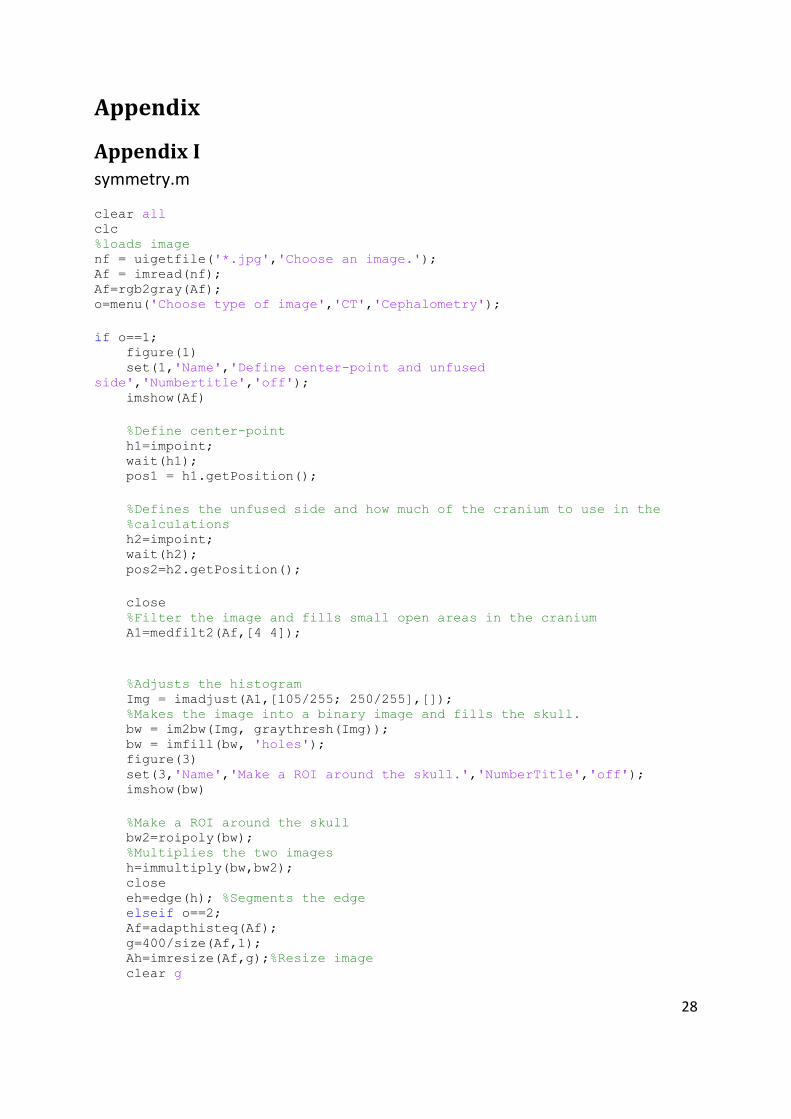
Appendix I symmetry.m
clear all clc %loads image nf = uigetfile('*.jpg','Choose an image.'); Af = imread(nf); Af=rgb2gray(Af); o=menu('Choose type of image','CT','Cephalometry');
if o==1; figure(1) set(1,'Name','Define center-point and unfused
side','Numbertitle','off'); imshow(Af)
%Define center-point h1=impoint; wait(h1); pos1 = h1.getPosition();
%Defines the unfused side and how much of the cranium to use in the %calculations h2=impoint; wait(h2); pos2=h2.getPosition();
close %Filter the image and fills small open areas in the cranium A1=medfilt2(Af,[4 4]);
%Adjusts the histogram Img = imadjust(A1,[105/255; 250/255],[]); %Makes the image into a binary image and fills the skull. bw = im2bw(Img, graythresh(Img)); bw = imfill(bw, 'holes'); figure(3) set(3,'Name','Make a ROI around the skull.','NumberTitle','off'); imshow(bw)
%Make a ROI around the skull bw2=roipoly(bw); %Multiplies the two images h=immultiply(bw,bw2); close eh=edge(h); %Segments the edge elseif o==2; Af=adapthisteq(Af); g=400/size(Af,1); Ah=imresize(Af,g);%Resize image clear g
29
figure (1) set(1,'Name','Define center-point, unfused side and the
cranium.','Numbertitle','off'); imshow(Ah); h=impoint; %Defines the center-point wait(h); pos1=h.getPosition(); i=impoint; %Defines the unfused side and how much of the cranium to use %in the calculations wait(i); pos2=i.getPosition(); delete(h); delete(i);
%Segments the cranium by hand h=impoint; t=1; while 1; i=impoint; if isempty(i);%Pusch esc to end the loop break end posh=h.getPosition(); posi=i.getPosition(); %The distance between the points shouldn't be too far. while sqrt((posh(1)-posi(1))^2+(posh(2)-posi(2))^2)>8; ts=text(size(Ah,2)/2-100, size(Ah,1)/2,'Place the point closer
to the previous point.'); delete(i) i=impoint; posi=i.getPosition; delete(ts) end x(t)=posi(1); y(t)=posi(2); t=t+1; h=impoint(gca,posi); end close %Creates a zero-matrix z=zeros(size(Ah)); z=im2bw(z); figure, imshow(z); k=1; BW1=z; %Makes a line between each point. while k<t-1; f = imline(gca,[x(k) x(k+1)], [y(k) y(k+1)]); BW = createMask(f);%Creates a mask so that the lines burns into a
matrix. k=k+1; BW2=imadd(logical(BW1),logical(BW)); BW1=BW2; end
close %closes the figure clear f t z BW1 BW k h i %clears variables eh=BW2;
30
eh=im2bw(eh); end
%changes the size of the image if 2*pos1(1)>size(eh,2) if (pos1(1)*2)>size(eh,2); j1=((2*pos1(1))-size(eh,2)); j21=zeros(size(eh,1),j1); eh=[eh j21]; end
%changes the size of the image if pos1(1)<size(eh,2). if pos1(1)<size(eh,2)/2; j5=(size(eh,2)-2*pos1(1)); j51=zeros(size(eh,1),j5); eh=[j51 eh]; pos1(1)=pos1(1)+size(j51,2); pos2(1)=pos2(1)+size(j51,2); end
%crops the image into one half and one "quarter" of the skull if pos2(1)<pos1(1); ceh1=eh((pos1(2)-pos1(2)/2):pos2(2), 1:pos1(1)); ceh2=eh((pos1(2)-pos1(2)/2):size(eh,1), pos1(1): 2*pos1(1)-1); else ceh1=eh((pos1(2)-pos1(2)/2):size(eh,1), 1:pos1(1)); ceh2=eh((pos1(2)-pos1(2)/2):pos2(2), pos1(1): 2*pos1(1)-1); end p4=fliplr(ceh1); %mirrors the left side
%makes the matrices the same size if size(p4,1)~=size(ceh2,1); dy=sqrt((size(p4,1)-size(ceh2,1))^2); yz=zeros(dy,size(p4,2)); if size(p4,1)>size(ceh2,1); ceh2=[ceh2;yz]; else p4=[p4;yz]; end end
%puts the center-point in the midle of a matrix a1=p4(:,1); a2=find(a1==1); a3=a2(1); a4=size(p4,1)-(2*a3);
%adds matrixes of zeros to get the center-point in the midle of a matrix B1=zeros(size(p4,1), size(p4,2)); B2=zeros(a4, size(p4,2));
E=[B2 B2; B1 p4]; I=[B2 B2; B1 ceh2]; B3=zeros(size(E,1),100); E1=[B3 E B3]; I1=[B3 I B3];
%Decides what side to rotate

31
if pos2(1)<pos1(1); Ik=I1; E3=E1; b=1; else E3=I1; Ik=E1; b=0; end
s1=0; s2=0; v=0; j2=0; f=0.24; while s1<=s2; I3=imrotate(Ik,v,'bilinear','crop'); I3(find(I3>f))=1; I3=im2bw(I3); s2=s1; %Store the latest value of s1 in s2 s1=0; t=size(E1,1)/2+1; l2=1;
while t<=size(E1,1); %Runs the while-loop until the line in E3 ends. %Makes a cirkle with radius l2 T=zeros(size(E1)); T2=T; x0=size(T,2)/2; y0=size(T,1)/2;
for i=1:size(T,2); for j=1:size(T,1); r=sqrt((i-x0)^2+(j-y0)^2); T(j,i)=r; end end L=find(T<=l2); T2(L)=1; L1=edge(T2); L1=medfilt2(L1,[1 2]); %widens the edge of the circle so that the % circle won't mis the curve even if the curve hasn't ended. L2=immultiply(L1,I3); %Finds a point in I3 that has the same radii %as a point in E3. L3=immultiply(L1,E3); %Finds a point in E3 that has the same radii %as a point in I3 [row, col]=find(L2); %Finds the coordinates of every pixels with %value one [row1, col1]=find(L3); %Finds the coordinates of every pixels with %value one if isempty(row1)|| isempty(row);%Breaks the loop when it reaches
the %end of the curve representing the unfused side break end R=L1; %finds the points where the curves and the circle intersect x1=mean(col1); x2=mean(col);
32
y1=mean(row1); y2=mean(row); if v==0; r1=max(row); r2=max(row1); end d=sqrt((x1-x2)^2+(y1-y2)^2); %Calculates the distance between the % points, that has the same radii, at the curves I3 and E3 t=t+1; s1=s1+d; l2=l2+1; end if s2==0; %Extra to come around the first loop s2=s1; end v=v+1; j2=j2+1; end
if j2==2; %Does the previous loop break at j2=2, the other direction is
tested. v=-2; %Starts at v=-2 not to miss v=0 due to the extra command added. s1=0; s2=0; j3=0; while s1<=s2; I3=imrotate(Ik,-v,'bilinear','crop'); I3(find(I3>f))=1; I3=im2bw(I3); s2=s1; s1=0;
t=size(E1,1)/2+1; l2=1; while t<=size(E1,1) %Makes a circle of radii l2 T=zeros(size(E1)); T2=T; x0=size(T,2)/2; y0=size(T,1)/2;
for i=1:size(T,2); for j=1:size(T,1); r=sqrt((i-x0)^2+(j-y0)^2); T(j,i)=r; end end L=find(T<=l2); T2(L)=1; L1=edge(T2); L1=medfilt2(L1,[1 2]); %widens the edge of the circle so that
the % circle won't mis the curve even if the curve hasn't ended. L2=immultiply(L1,I3); %Finds a point in I3 that has the same
radii %as a point in E3. L3=immultiply(L1,E3); %Finds a point in E3 that has the same
radii %as a point in I3
33
[row, col]=find(L2); %Finds the coordinates of every pixels
with %value one [row1, col1]=find(L3); %Finds the coordinates of every pixels
with %value one if isempty(row1) || isempty(row); %Breaks the loop when it
reaches the %end of the curve representing the unfused side break end R=L1; %finds the points where the curves and the circle intersect x1=mean(col1); x2=mean(col); y1=mean(row1); y2=mean(row); if v==0; r1=max(row); r2=max(row1); end d=sqrt((x1-x2)^2+(y1-y2)^2); %Calculates the distance between
the % points, that has the same radii, at the curves I3 and E3 t=t+1; s1=s1+d; l2=l2+1; end if s2==0; %extra to get around the first lap s2=s1; end v=v+1; j3=j3+1; end end
%calculates the number of pixels between the two curves if j2>2; I3=imrotate(Ik,(v-2),'bilinear','crop'); I3(find(I3>f))=1; else I3=imrotate(Ik,-(v-2),'bilinear','crop'); I3(find(I3>f))=1; end I3=im2bw(I3); p5=imadd(I3,logical(E3)); p5=im2bw(p5); R1=immultiply(I3,R); [row10 col10]=find(R1==1); y21=mean(row10); x21=mean(col10);
figure, imshow(p5); li=imline(gca,[x1 x21], [y1 y21]); cm=createMask(li); close cm1=imadd(cm,logical(p5)); cm1=im2bw(cm1); p8=imfill(cm1,'holes');
34
p9=imsubtract(p8,p5); n1=find(p9==1); n3=length(n1);%the number of pixels between the two curves
%calculates the number of pixels in the area denoted K N=fliplr(E1); if b==1; f3=N(r2,:); col4=find(f3==1); z3=col4(1); f4=I1(r1,:); col5=find(f4==1); z4=col5(1); else f3=I1(r2,:); col4=find(f3==1); z3=col4(1); f4=N(r1,:); col5=find(f4==1); z4=col5(1); end
N4=imadd(N,I1); g=imline(gca,[z3 z4], [r2 r1]); bw1 = createMask(g); close k=imadd(bw1,logical(N4)); k1=imfill(k,'holes'); k2=imsubtract(k1,k); figure, imshow(k2); n=find(k2==1); n2=length(n); %number of pixels in the area K
sum2=round(n3/n2*1000);%the symmetry ratio is calculated and multiplied %with 1000 so that the numbers won't be so small. sum=num2str(sum2); resultatruta(sum)

35
Appendix II User manual.
Install program
1. Run Symmetry_pkg.
2. Run the program Symmetry.
Run program
1. Choose an image (it is important that the image is in the same folder as the program). Verify what type of image it is. 1.1. CT
1.1.1. Define the center-point and how much of the cranium the program should use
when doing the calculations, this point is placed on the unfused side. Using the
mouse, you select the points by left-clicking. The point can be moved until you
verify the location by double-clicking on the point.
1.1.2. Place a ROI around the skull. Using the mouse, you specify the region by
selecting vertices around the skull by left-clicking. To close the ROI move the
pointer over the initial vertex of the polygon that you selected. The pointer
changes to a circle. Click either mouse button. You can move or resize the ROI
using the mouse. When you are finished positioning and sizing the ROI, double-
clicking or right-clicking inside the region will start the calculations.
1.2. Cephalometry
1.2.1. Define the center-point and how much of the cranium the program should use
when doing the calculations, this point is placed on the unfused side. Using the
mouse, you select the points by left-clicking. The point can be moved until you
verify the location by double-clicking on the point. Also define the cranium by
interactive placement of points along the whole edge of the cranium. Once the
point is placed it cannot be moved. When the cranium is defined push esc to
proceed.