mie404 - lecture 3 - laplace transforms and intro to block diagrams.pdf
TRANSCRIPT

MIE404: Control Systems
Lecture 3Laplace Transforms & Block Diagrams
9/16/2015 MIE404 – Fall 2015 1

Lecture Overview
• Last Time• Modelling Mechanical and Electrical Systems
• This Lecture• Review of Laplace Transforms• Transfer Functions• Block Diagrams
9/16/2015 2MIE404 – Fall 2015

Laplace Transforms - Motivation
• Take and ODE (of any order)
• To an algebraic equation
• Benefits
9/16/2015 3MIE404 – Fall 2015
ܯ ሷݔ ݐ + ሶݔ ݐ + ݔ ݐ = (ݐ)
ଶݏܯ ݏ + ݏ ݏ + = (ݏ)ܨ

Laplace Transform - Definition
Given a function f(t) in the time domain, we define its Laplace transform, F(s), as
F(s) is the frequency domain representation of f(t).
9/16/2015 4MIE404 – Fall 2015

Finding the Laplace Transform• Example 1• Heaviside Step Function
9/17/2015 5MIE404 – Fall 2015
ݑ ݐ = ቊ0, ݐ < 01, ݐ 0

Finding the Laplace Transform
9/17/2015 6MIE404 – Fall 2015
• Example 1• Decaying Exponential
ݐ = ቊ 0, ݐ < 0௧ , ݐ 0

Common Laplace Transforms
9/17/2015 7MIE404 – Fall 2015

Common Laplace Transforms
9/17/2015 8MIE404 – Fall 2015
t0
į(t)

Properties of Laplace Transforms• Laplace transforms have many properties we will
exploit in the course• Linearity
• Differentiation
• Integration
9/17/2015 9MIE404 – Fall 2015

Converting Models to Laplace Domain• Consider our Mass-Spring Damper System
9/17/2015 10MIE404 – Fall 2015
f(t)
x(t)
M
b
k
(ݐ) = ܯ ሷ(ݐ)ݔ + ሶ(ݐ)ݔ + (ݐ)ݔ

Converting Models to Laplace Domain
9/17/2015 11MIE404 – Fall 2015
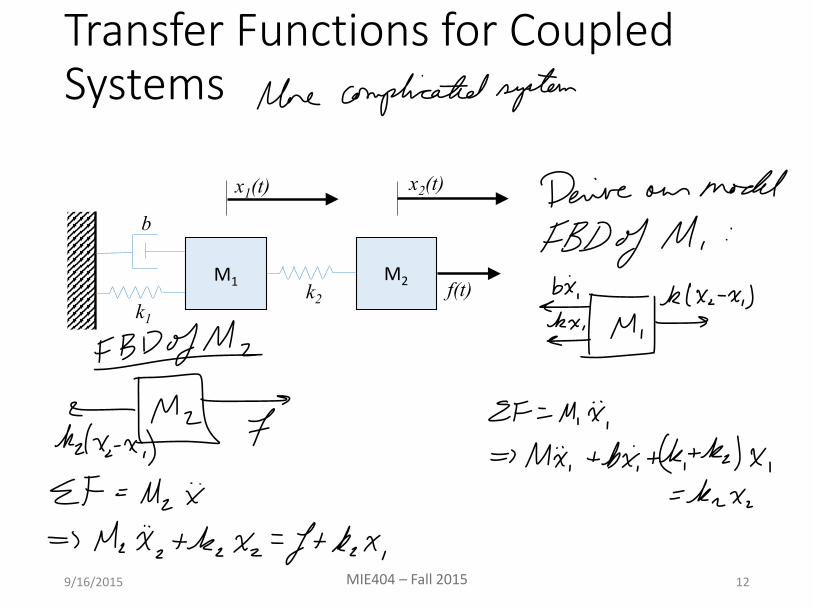
Transfer Functions for Coupled Systems
9/16/2015 12MIE404 – Fall 2015
x1(t)
M1
b
k1
f(t)M2k2
x2(t)

Transfer Functions for Coupled Systems
9/17/2015 13MIE404 – Fall 2015

Block Diagrams
• Block Diagrams
• Why are they useful?
9/17/2015 14MIE404 – Fall 2015

Block Diagrams• Examples
9/17/2015 15MIE404 – Fall 2015
f(t)
x(t)
M
b
k
(ݐ) = ܯ ሷ(ݐ)ݔ + ሶ(ݐ)ݔ + (ݐ)ݔ
1ଶݏܯ + ݏ +
(ݏ)ܨ (ݏ)

Block Diagrams• Examples
9/17/2015 16MIE404 – Fall 2015
f(t)
x(t)
M
b
k
(ݐ) = ܯ ሷ(ݐ)ݔ + ሶ(ݐ)ݔ + (ݐ)ݔ
1ݏ
ሷݔ ሶݔ +ݔ
ܯ
ܯ
1ݏ
1ܯ

Building Up A Block Diagram• Example
9/17/2015 17MIE404 – Fall 2015
(ݐ) = ܯ ሷ(ݐ)ݔ + ሶ(ݐ)ݔ + (ݐ)ݔ
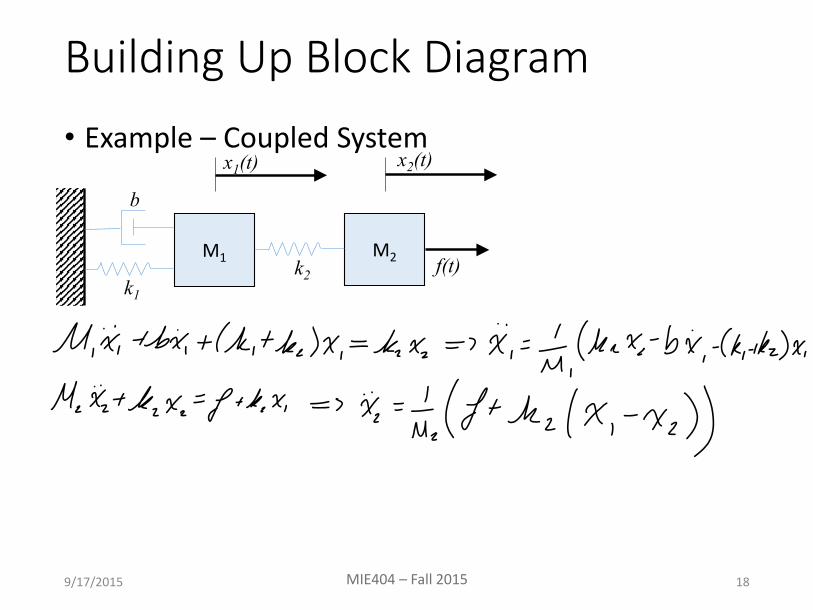
Building Up Block Diagram• Example – Coupled System
9/17/2015 18MIE404 – Fall 2015
x1(t)
M1
b
k1
f(t)M2k2
x2(t)

Building Up Block Diagram• Example Coupled System
9/17/2015 19MIE404 – Fall 2015

Summary• This Time
• Review of Laplace Transforms
• Transfer Functions
• Block Diagrams
• Next Lecture• Modelling - Electro-Mechanical Systems• More on Laplace Transforms – Using to solve for system
dynamic response.
9/17/2015 20MIE404 – Fall 2015