minimalist architectures for large-scale sensor networks upamanyu madhow ece department university...
TRANSCRIPT
Minimalist Architectures for Large-Scale Sensor Networks
Upamanyu MadhowECE Department
University of California, Santa Barbara
Funding SourcesQuickTime™ and aTIFF (Uncompressed) decompressorare needed to see this picture.QuickTime™ and a
TIFF (Uncompressed) decompressorare needed to see this picture.
Research Overview
• Sensor Networks– Scalability: size and energy
– Camera Networks
– Fundamentals of Tracking
• Nextgen Wireless– Millimeter wave communication
• Indoor WPAN: Gigabit speeds
• Outdoor LOS: Multigigabit speeds
– Scalability and QoS in multihop wireless networks
– Cognitive radio architectures and signal processing
• Multimedia security– Data hiding
– Steganalysis
Today’s focus
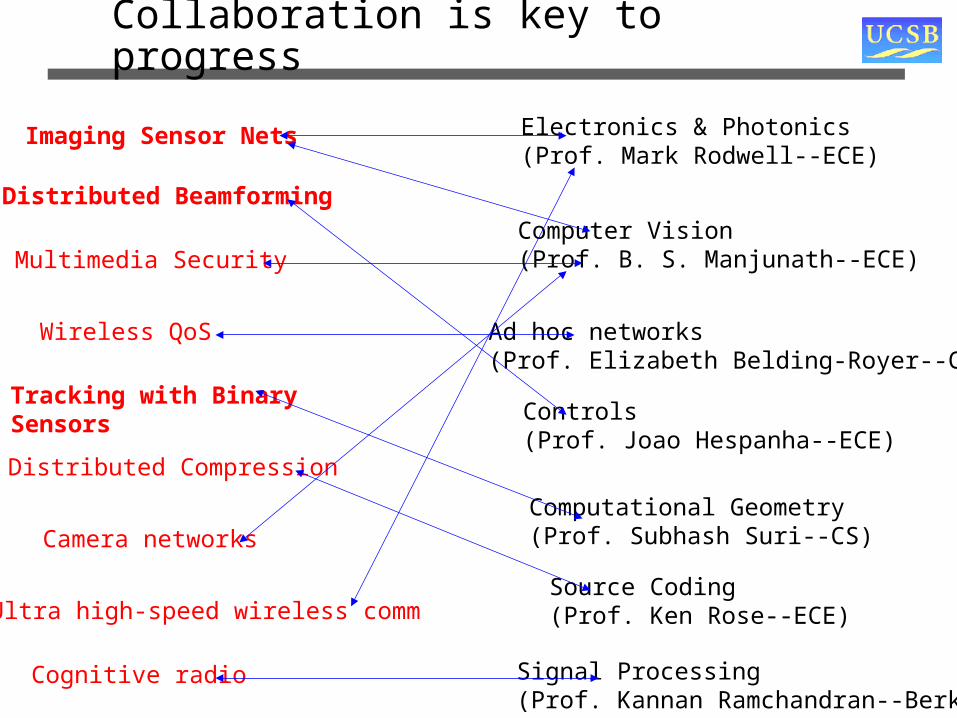
Collaboration is key to progress
Ad hoc networks(Prof. Elizabeth Belding-Royer--CS)
Electronics & Photonics(Prof. Mark Rodwell--ECE)
Computer Vision(Prof. B. S. Manjunath--ECE)
Controls(Prof. Joao Hespanha--ECE)
Computational Geometry(Prof. Subhash Suri--CS)
Imaging Sensor Nets
Distributed Beamforming
Multimedia Security
Wireless QoS
Tracking with BinarySensors
Distributed Compression
Camera networks
Ultra high-speed wireless commSource Coding(Prof. Ken Rose--ECE)
Cognitive radio Signal Processing(Prof. Kannan Ramchandran--Berkeley)
Who is doing the work?
• Bharath Ananthasubramaniam: Signal Processing for Imaging Sensor Nets
• Ibrahim El-Khalil: Data hiding and steganalysis
• Raghu Mudumbai: Distributed beamforming, camera nets, tracking, cross-layer design
• Mike Quinn: Camera networks
• Anindya Sarkar: Data hiding and steganalysis
• Munkyo Seo: IC design for Imaging Sensor Nets
• Jaspreet Singh: Distributed compression, high-speed comm
• Sumit Singh: Wireless QoS, protocols for mm wave radio
• Ben Wild (UC, Berkeley): Distributed beamforming prototype
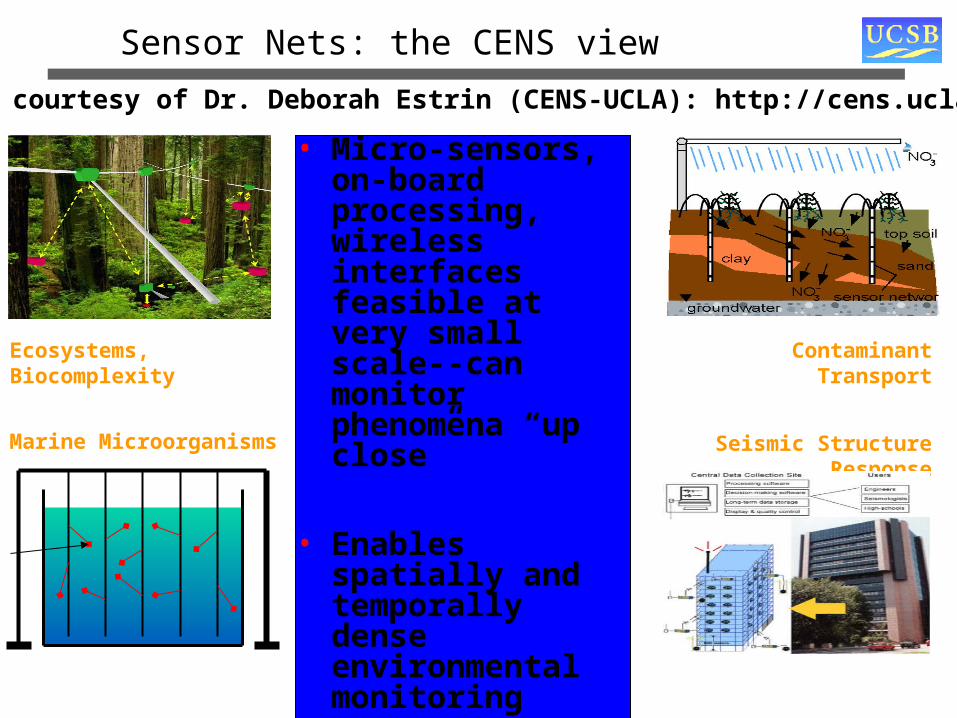
Sensor Nets: the CENS view
• Micro-sensors, on-board processing, wireless interfaces feasible at very small scale--can monitor phenomena “up close”
• Enables spatially and temporally dense environmental monitoring
Embedded Networked Sensing will reveal previously unobservable phenomena
Contaminant TransportEcosystems, Biocomplexity
Marine Microorganisms Seismic Structure Response
Slide courtesy of Dr. Deborah Estrin (CENS-UCLA): http://cens.ucla.edu

Sensor Nets Today
• Berkeley motes continue to prove their worth
– Impact on science
– Promising for DoD and security applications
• Scalability of flat architectures limited to 100s of nodes
– Enough for many applications
– Hierarchical architectures can help
• But we are far from the sci-fi vision of Smart Dust
– Hundreds of thousands of randomly deployed sensors
– Dumb sensors that get smarter by working together
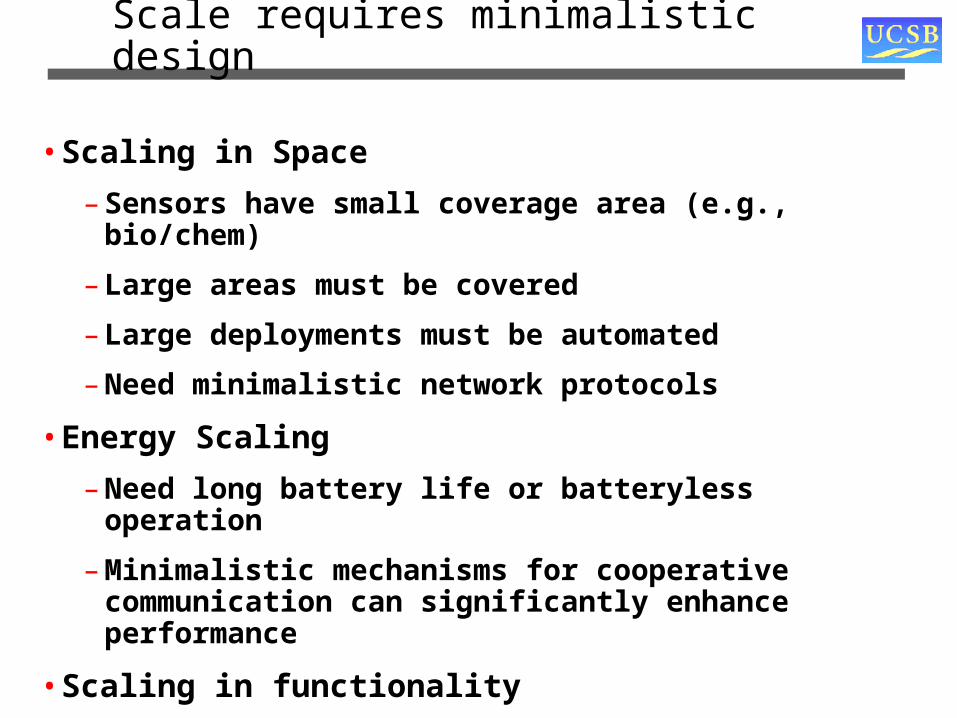
Scale requires minimalistic design
• Scaling in Space
– Sensors have small coverage area (e.g., bio/chem)
– Large areas must be covered
– Large deployments must be automated
– Need minimalistic network protocols
• Energy Scaling
– Need long battery life or batteryless operation
– Minimalistic mechanisms for cooperative communication can significantly enhance performance
• Scaling in functionality
– Small, inexpensive, noisy, failure-prone microsensors
– Need minimalistic sensing models
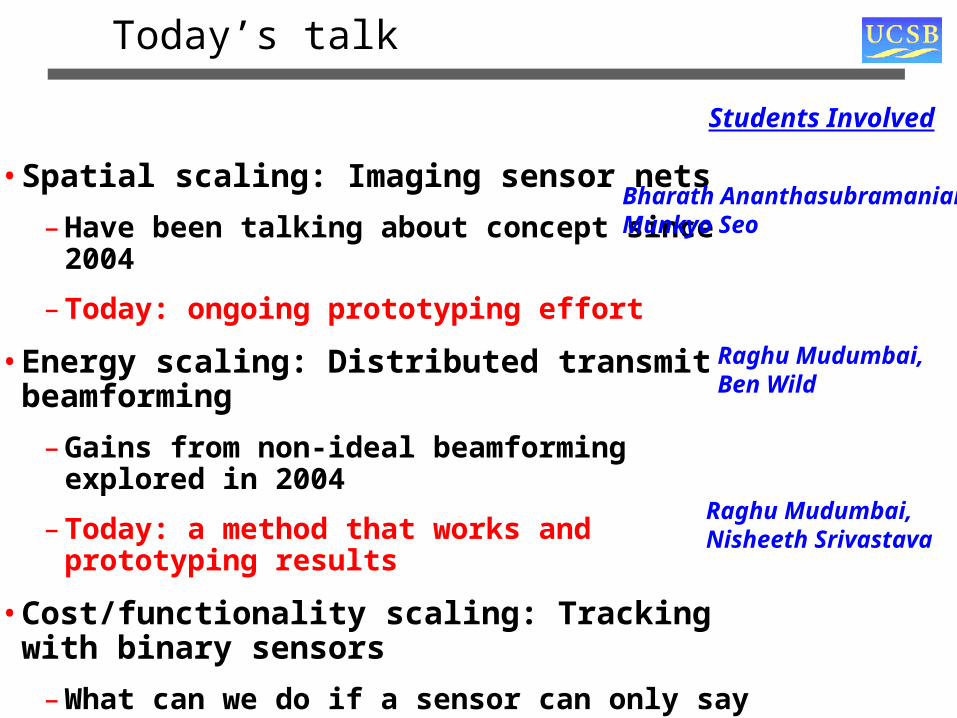
Today’s talk
• Spatial scaling: Imaging sensor nets
– Have been talking about concept since 2004
– Today: ongoing prototyping effort
• Energy scaling: Distributed transmit beamforming
– Gains from non-ideal beamforming explored in 2004
– Today: a method that works and prototyping results
• Cost/functionality scaling: Tracking with binary sensors
– What can we do if a sensor can only say yes or no?
– Today: Fundamental limits, minimal descriptions, algorithms
Students Involved
Bharath Ananthasubramaniam,Munkyo Seo
Raghu Mudumbai,Ben Wild
Raghu Mudumbai,Nisheeth Srivastava
Imaging Sensor Nets

Imaging Sensor Nets: the Concept
Field of simple, low-power sensors dispersed across field of view Cast on ground from truck, plane, or satellite
Sensor as pixels (“dumb dust”) Electronically reflect, with data modulation, beacon from collector (“virtual radar”) Minimal functionality: no GPS, no inter-sensor networking Lifetime of year on watch cell battery
Sophisticated collector Radar and image processing, multiuser data demodulation Joint localization and data collection
Range varies from 100m to 100 km Active versus “passive” sensors, collector characteristics
vast numbers of low-complexity "dumb" pixelssensor + RF transducer + antenna.
collector: satellite
base station on UAV
Sensor fieldSensor field
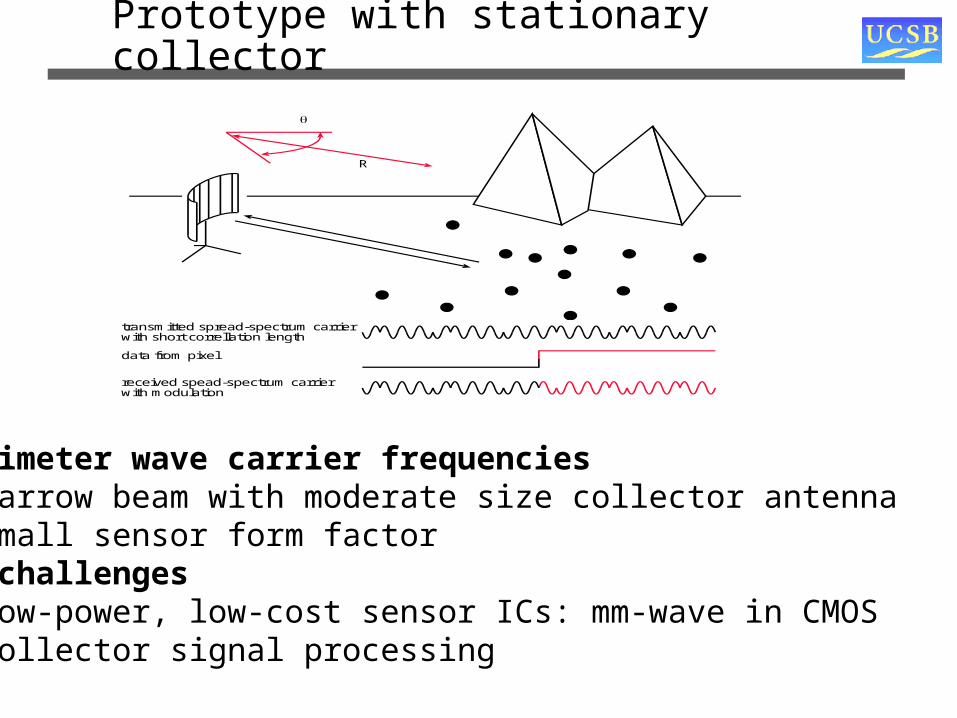
Prototype with stationary collector
R
θ
transmitted spread-spectrum carrierwith short correllation length
data from pixel
received spead-spectrum carrierwith modulation
Millimeter wave carrier frequencies Narrow beam with moderate size collector antenna Small sensor form factorKey challenges Low-power, low-cost sensor ICs: mm-wave in CMOS Collector signal processing
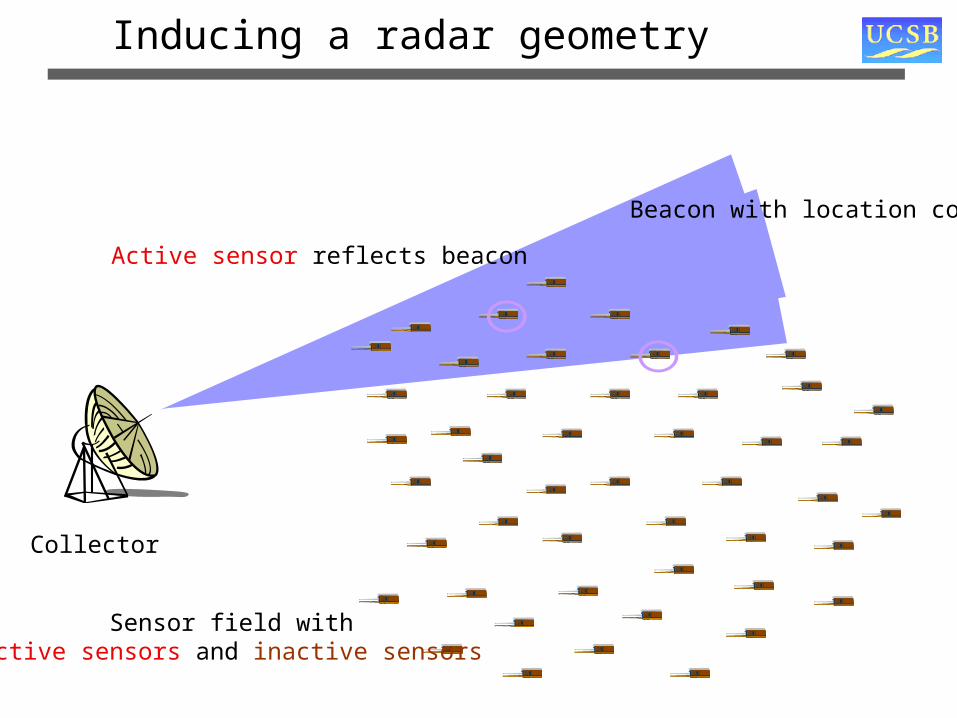
Collector
Beacon with location code
Sensor field withactive sensors and inactive sensors
Active sensor reflects beacon
Inducing a radar geometry

Basic Link Diagram
PRBS
DATA
Jointly detect DATA and DELAY
Collector
Sensor
BPSK modulation
updowndelta fff −=
upf
downf
downf
PRBSf
TXcollD ,
RXcollD ,
RXsensD ,
TXsensD ,
DOWN-LINK
UP-LINK
Freq. shift to filter out ground return

Hierarchy of Challenges
Circuit-level
Technology-level
Link-level
Detection/Estimation
Imaging Algorithm
Application interface
Mm-wave Design
IC technology Substrate/Package/Integration
Signal/ImageProcessing
Low-power, mm-wave circuit designEfficient, low-loss antennaInterconnect
Sensor architectureLink budget calculationCollector phased array design
Estimation for asynchronous modulationLimited precision samples
Nonideal beam patternsIntegrating soft info
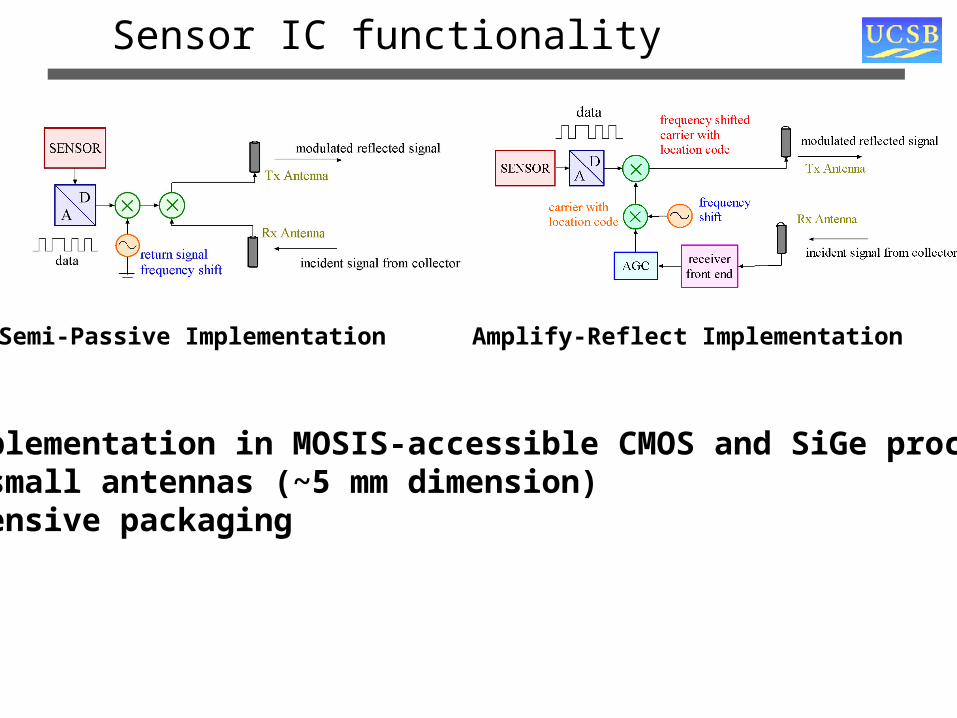
Sensor IC functionality
Semi-Passive Implementation Amplify-Reflect Implementation
IC implementation in MOSIS-accessible CMOS and SiGe processesVery small antennas (~5 mm dimension)Inexpensive packaging
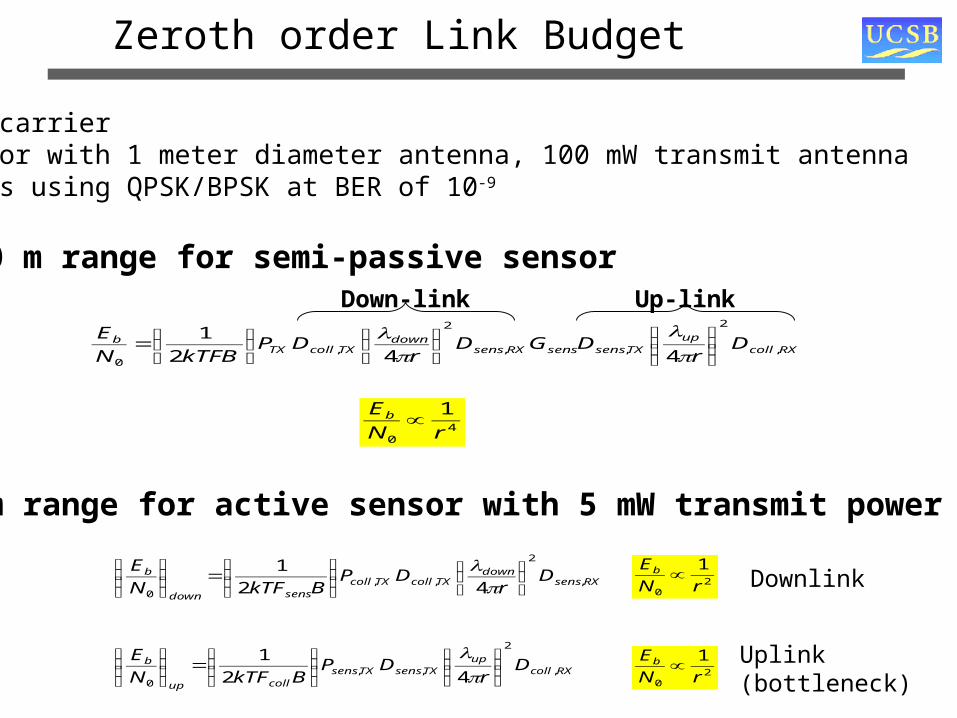
Zeroth order Link Budget
RXcollup
TXsenssensRXsensdown
TXcollTXb D
rDGD
rDP
kTFBN
E,
2
,,
2
,0 442
1⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠
⎞⎜⎝
⎛⎟⎠
⎞⎜⎝
⎛=πλ
πλ
Down-link Up-link
40
1
rN
Eb ∝
75 GHz carrierCollector with 1 meter diameter antenna, 100 mW transmit antenna100 Kbps using QPSK/BPSK at BER of 10-9
300 m range for semi-passive sensor
100 km range for active sensor with 5 mW transmit power
RXsensdown
TXcollTXcollsensdown
b Dr
DPBkTFN
E,
2
,,0 42
1⎟⎠
⎞⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛
πλ
RXcollup
TXsensTXsenscollup
b Dr
DPBkTFN
E,
2
,,0 42
1⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛
πλ
20
1
rN
Eb ∝
20
1
rN
Eb ∝
Downlink
Uplink(bottleneck)
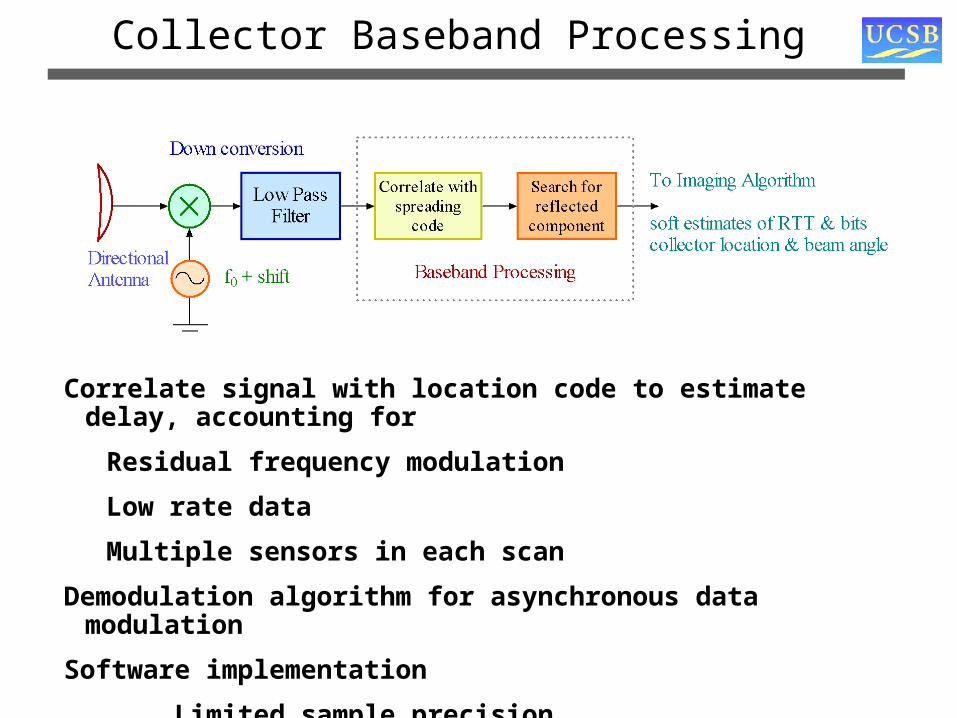
Collector Baseband Processing
Correlate signal with location code to estimate delay, accounting for
Residual frequency modulation
Low rate data
Multiple sensors in each scan
Demodulation algorithm for asynchronous data modulation
Software implementation
Limited sample precision
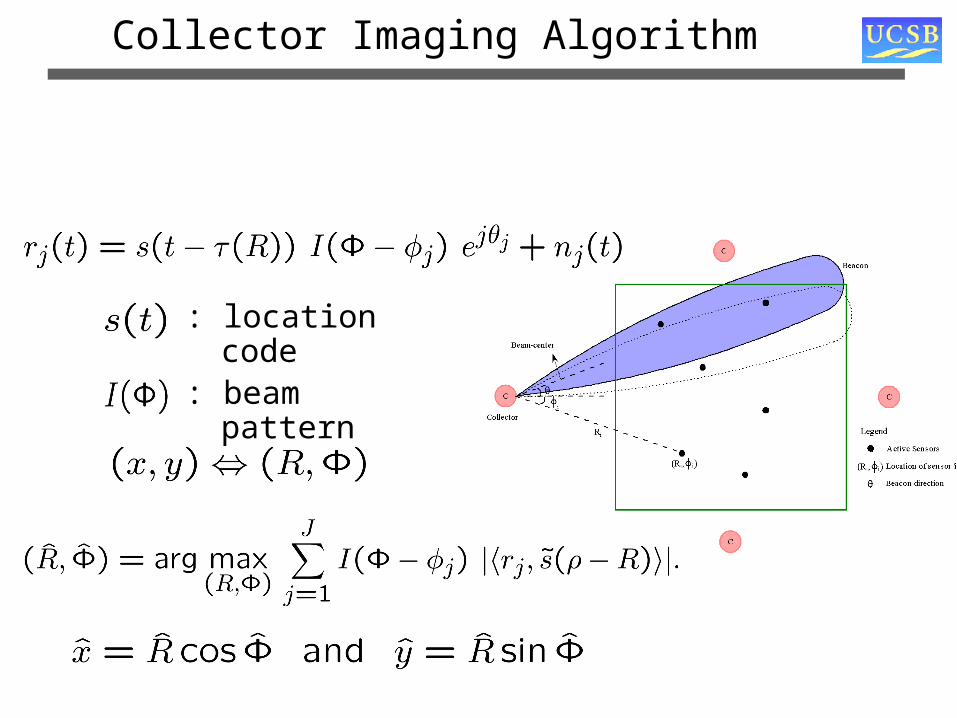
Collector Imaging Algorithm
: location code
: beam pattern
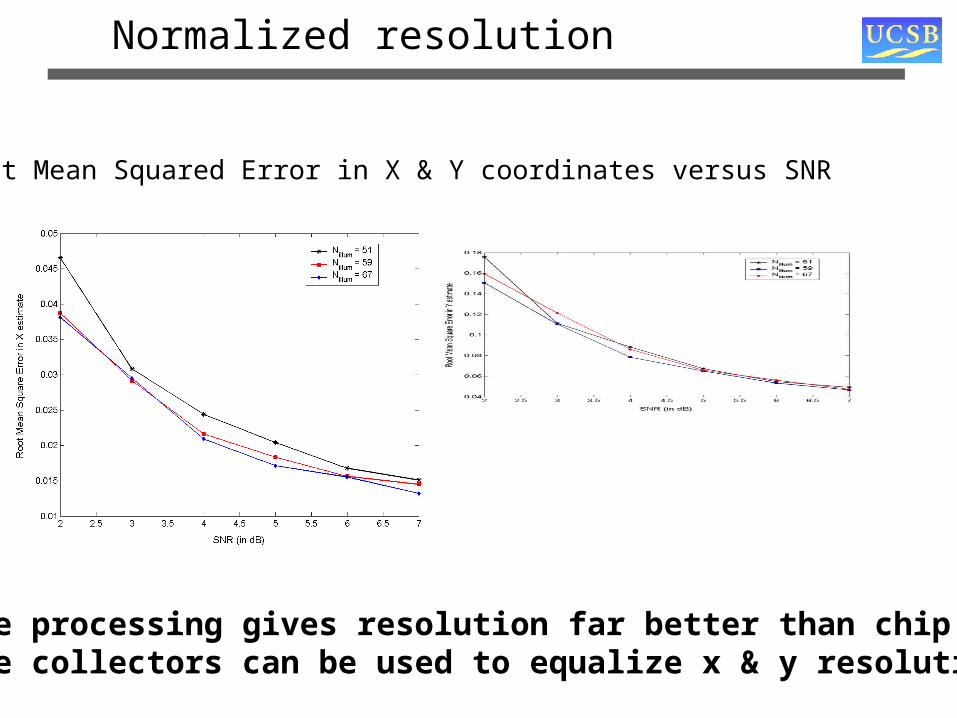
Normalized resolution
Root Mean Squared Error in X & Y coordinates versus SNR
SAR-like processing gives resolution far better than chip durationMultiple collectors can be used to equalize x & y resolution
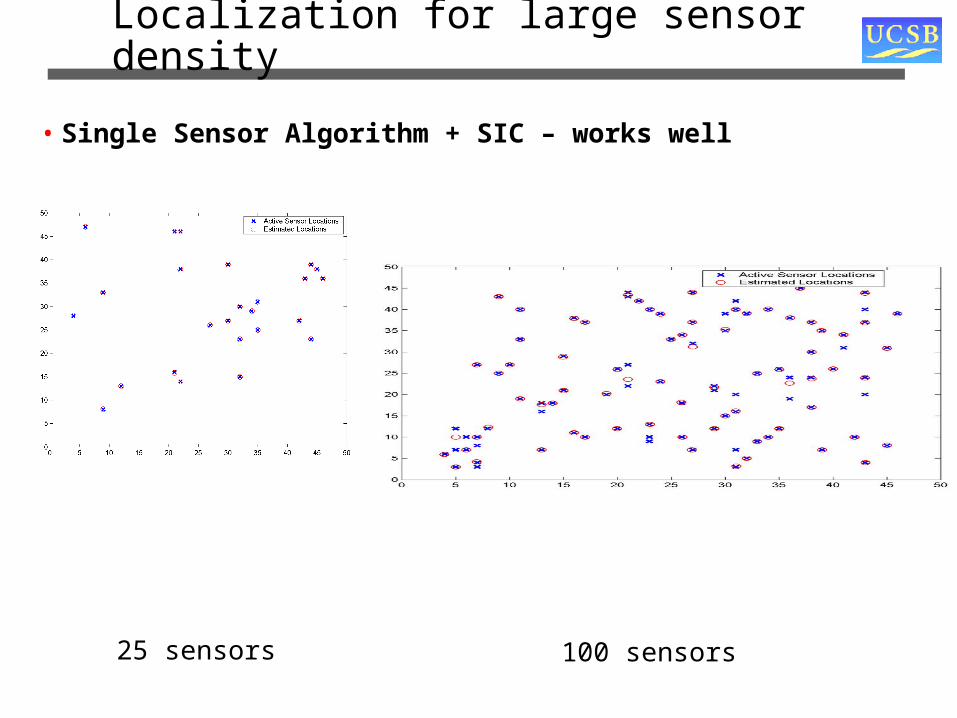
Localization for large sensor density
• Single Sensor Algorithm + SIC – works well
25 sensors 100 sensors
Brassboard concept validation
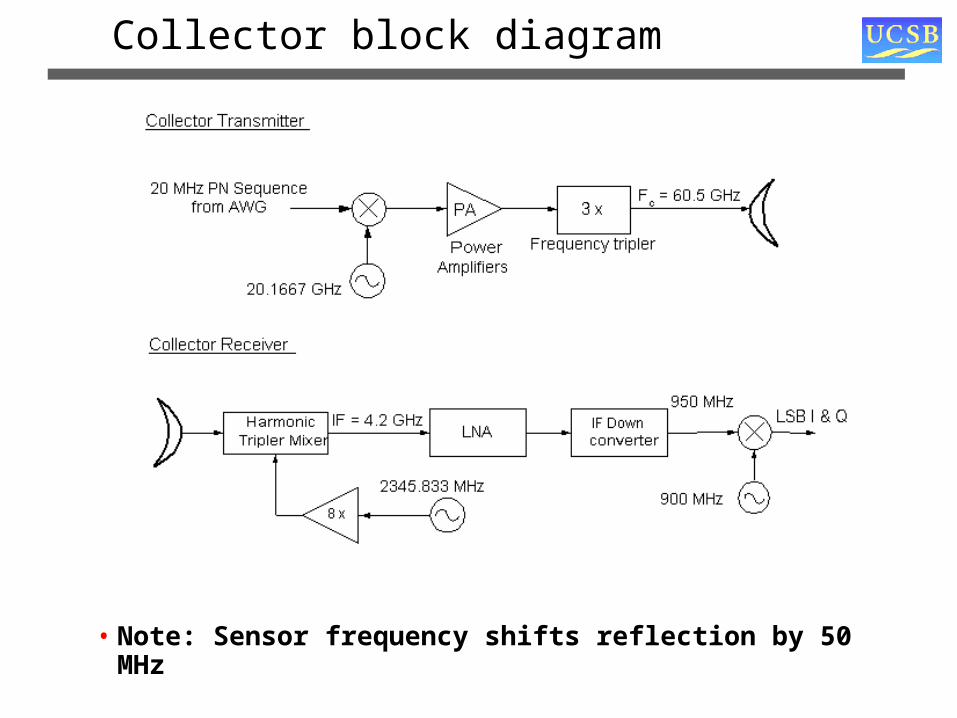
Collector block diagram
• Note: Sensor frequency shifts reflection by 50 MHz

Brassboarded collector and sensor
Collector Sensor
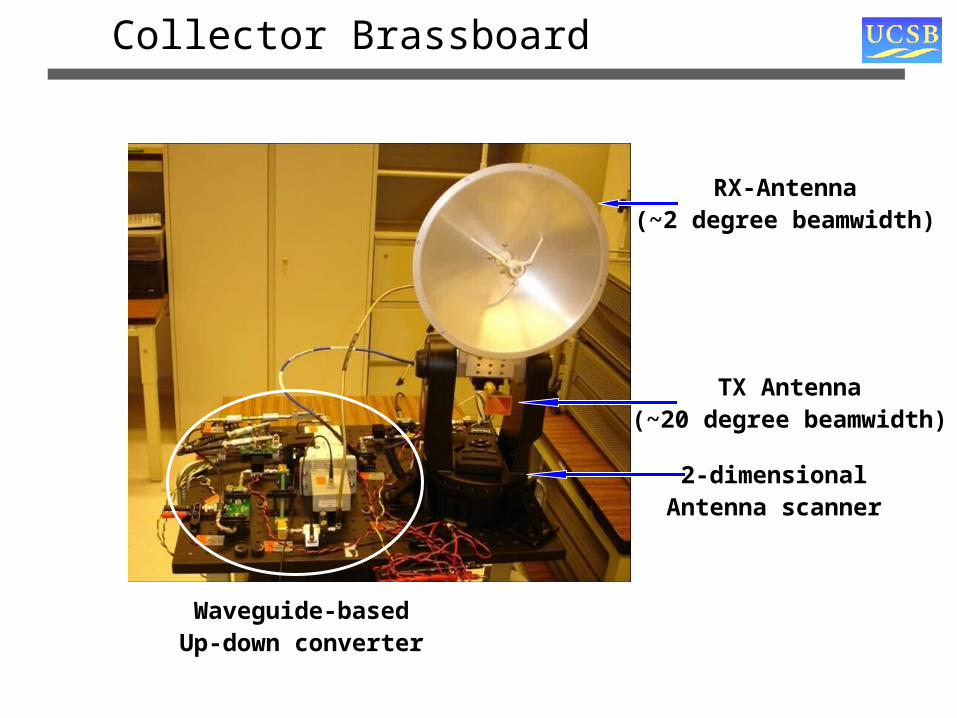
Collector Brassboard
RX-Antenna(~2 degree beamwidth)
TX Antenna(~20 degree beamwidth)
Waveguide-basedUp-down converter
2-dimensionalAntenna scanner
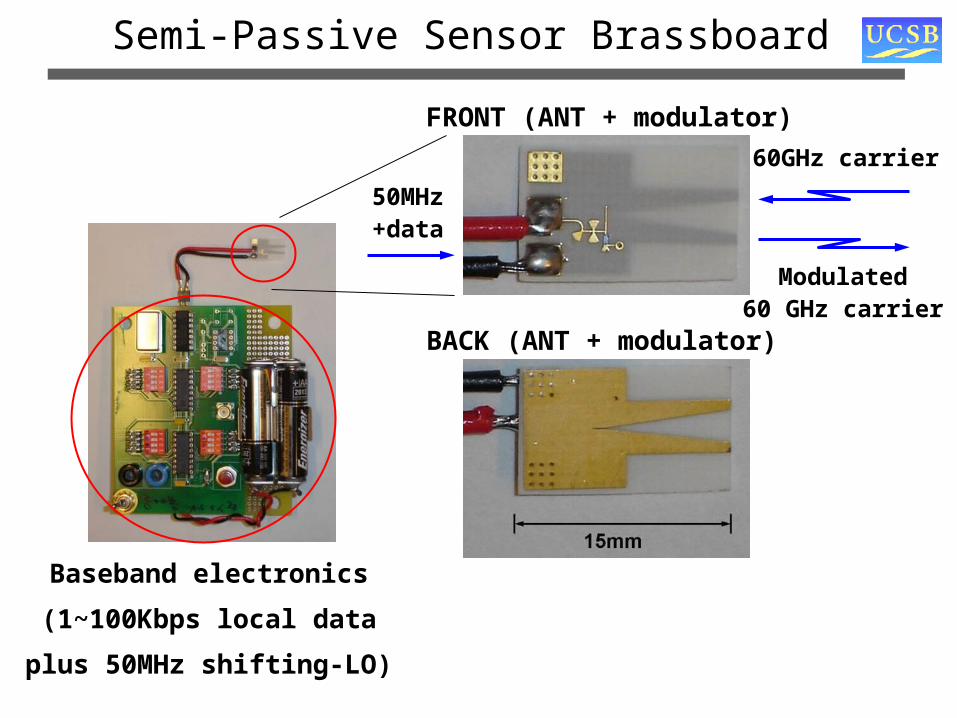
Semi-Passive Sensor Brassboard
Baseband electronics
(1~100Kbps local data
plus 50MHz shifting-LO)
FRONT (ANT + modulator)
BACK (ANT + modulator)
60GHz carrier
Modulated60 GHz carrier
50MHz+data
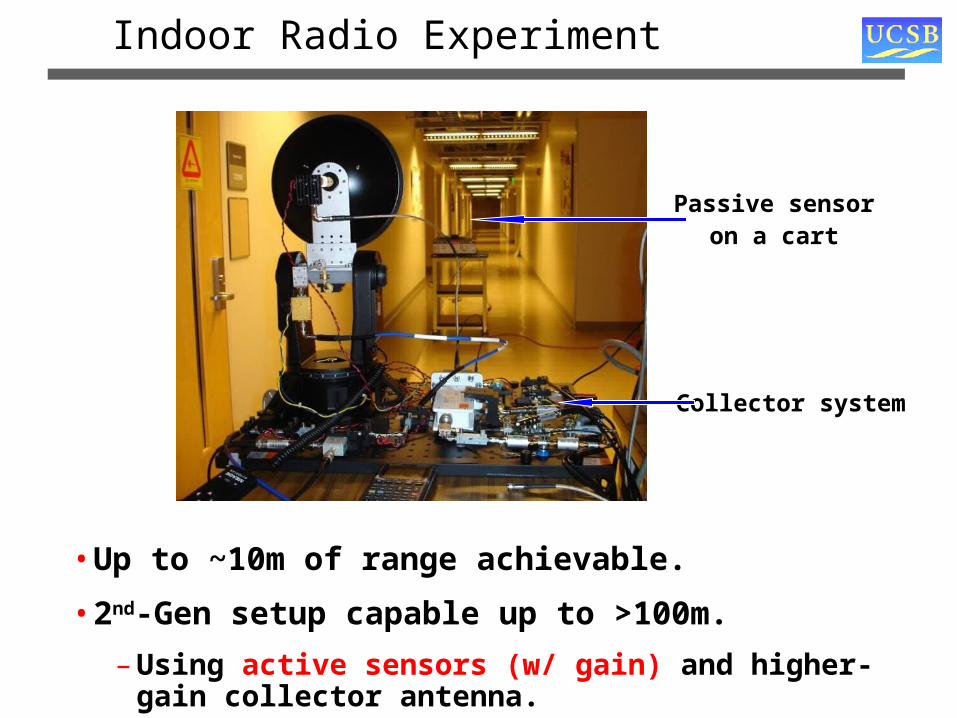
Indoor Radio Experiment
• Up to ~10m of range achievable.
• 2nd-Gen setup capable up to >100m.
– Using active sensors (w/ gain) and higher-gain collector antenna.
Passive sensoron a cart
Collector system
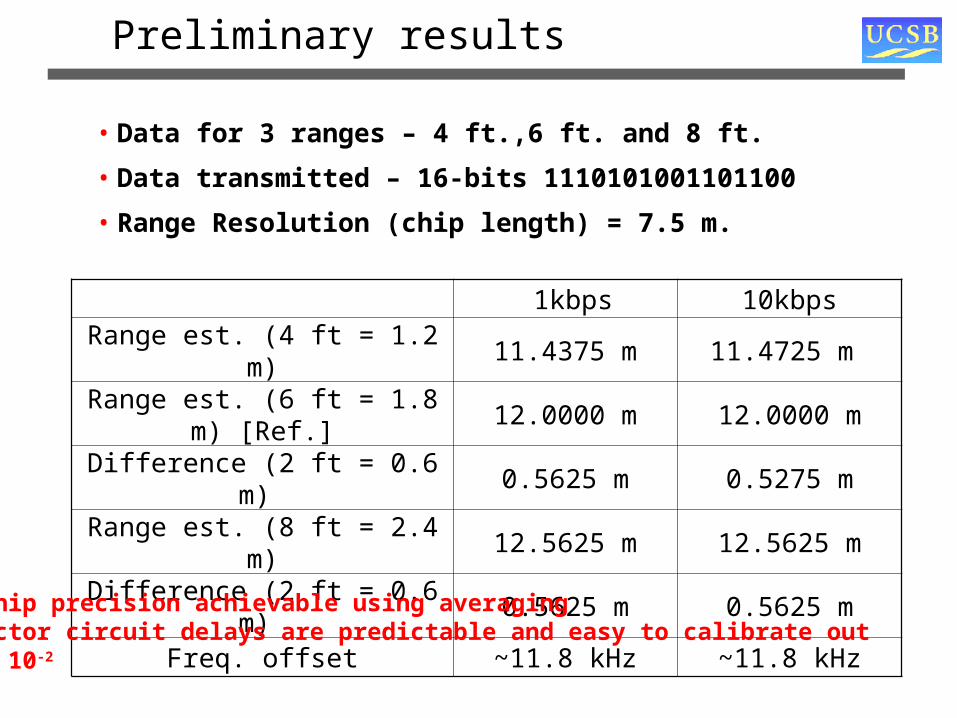
Preliminary results
• Data for 3 ranges – 4 ft.,6 ft. and 8 ft.
• Data transmitted – 16-bits 1110101001101100
• Range Resolution (chip length) = 7.5 m.
1kbps 10kbpsRange est. (4 ft = 1.2 m) 11.4375 m 11.4725 m
Range est. (6 ft = 1.8 m) [Ref.] 12.0000 m 12.0000 mDifference (2 ft = 0.6 m) 0.5625 m 0.5275 mRange est. (8 ft = 2.4 m) 12.5625 m 12.5625 mDifference (2 ft = 0.6 m) 0.5625 m 0.5625 m
Freq. offset ~11.8 kHz ~11.8 kHz
Sub-chip precision achievable using averaging Collector circuit delays are predictable and easy to calibrate outBER ~ 10-2

Future Work
• Collector Hardware/Processing
– Azimuth data collection – from computer by controlling antenna pointing direction
– Azimuth processing to improve effective SNR/ Range
– Upgrade PA to 200mW (full power) to perform outdoor ranging experiments. (with FCC permission)
– Integrate collector components into IC
• Sensor ICs
• Complete Design of “Passive” Sensor CMOS IC
• Work towards the Active ICs

Imaging Sensor Nets: Current Status
• Lab-scale mm wave experiment to verify link budgets
– Basic concept has been verified
– Baseband software (version 1) has been developed
• Brassboard to-dos
– Azimuth data collection
– Higher power transmission to increase range (awaiting FCC OK)
• IC design for semi-passive sensor
• IC design for active sensor
– Need creative solution for isolation problems
• Many open system level issues
– Data representation/compression, redundancy
– Exploiting multiple collectors
– Sensor-driven imaging sensor nets
Distributed Beamforming
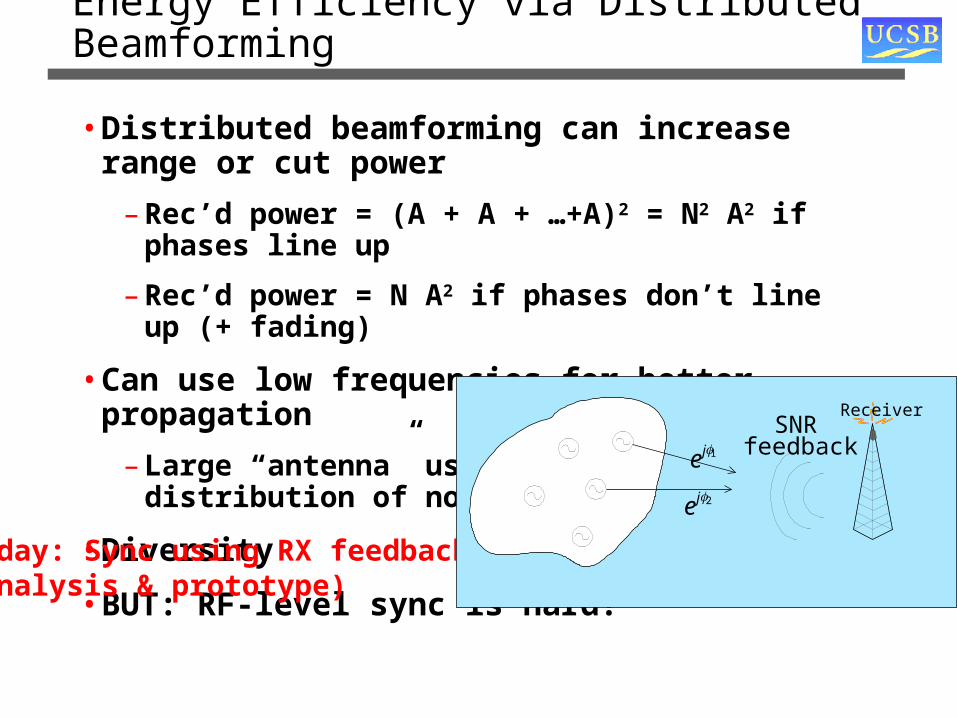
Energy Efficiency via Distributed Beamforming
• Distributed beamforming can increase range or cut power
– Rec’d power = (A + A + …+A)2 = N2 A2 if phases line up
– Rec’d power = N A2 if phases don’t line up (+ fading)
• Can use low frequencies for better propagation
– Large “antenna” using natural spatial distribution of nodes
• Diversity
• BUT: RF-level sync is hard!
Today: Sync using RX feedback(analysis & prototype)
Receiver
1je
2je
SNRfeedback

Feedback Control Mechanism
• Initially the carrier phases are unknown • Each timeslot, the transmitters try a random phase correction
•Keep the corrections that increase SNR, discard the others• Carrier phases become more and more aligned• Phase coherence achieved in time linear in number of nodes
Typical phase evolution(10 nodes)
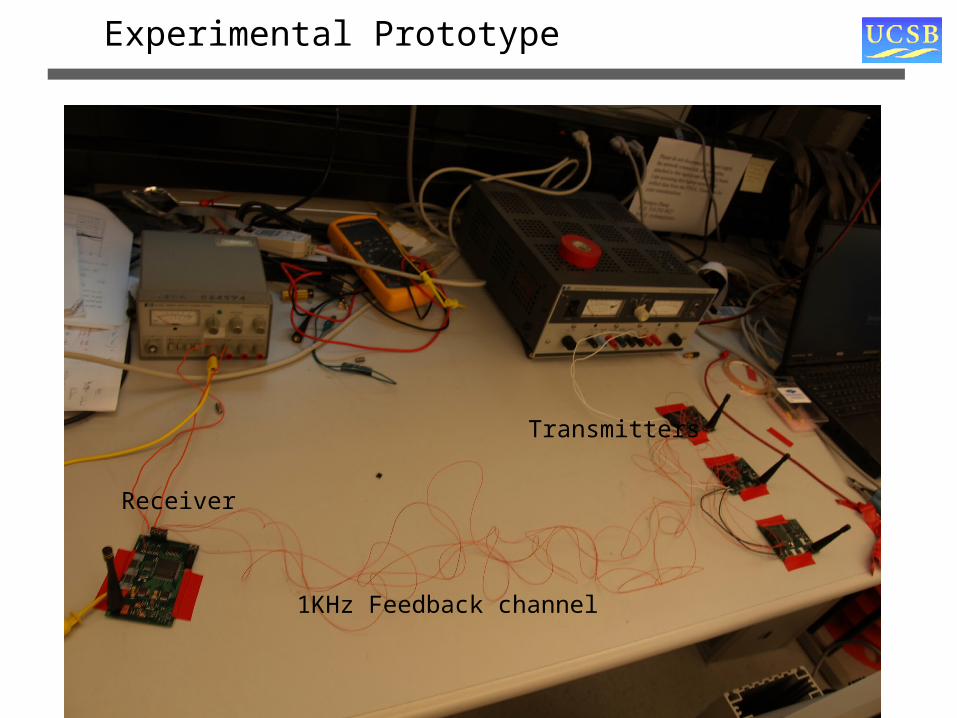
Experimental Prototype
Receiver
Transmitters
1KHz Feedback channel
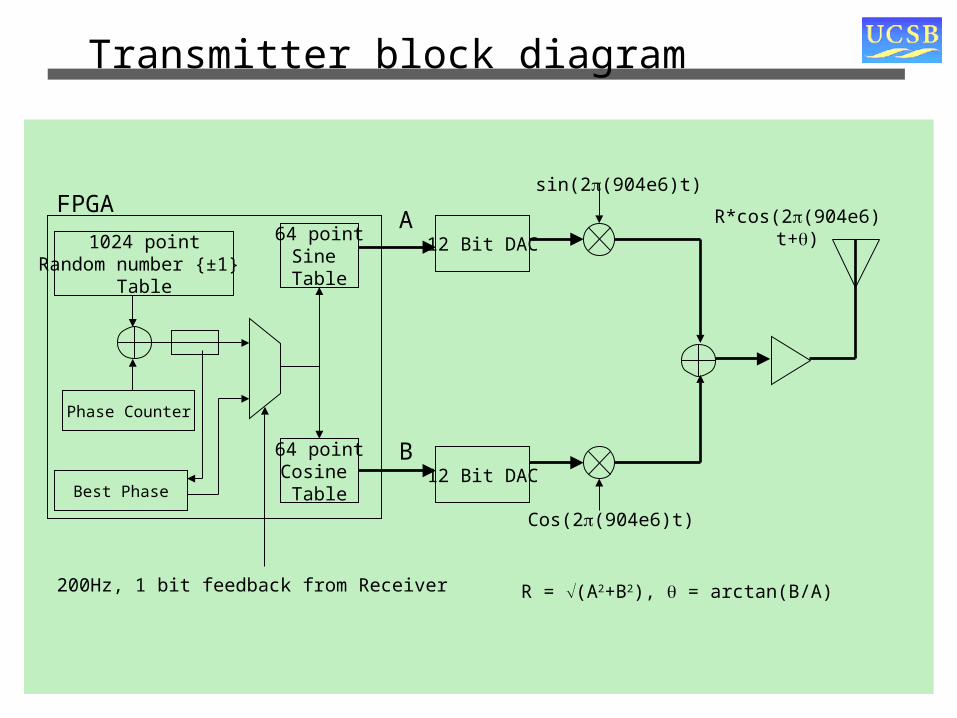
Transmitter block diagram
12 Bit DAC
FPGA
200Hz, 1 bit feedback from Receiver
12 Bit DAC
Cos(2π(904e6)t)
R*cos(2π(904e6)t+θ)64 point
Sine Table
64 pointCosine Table
1024 pointRandom number {±1}
Table
Phase Counter
Best Phase
A
B
sin(2π(904e6)t)
R = (A2+B2), θ = arctan(B/A)

Receiver block diagram
904 MHz Bandpass Filter,
20MHz BW cos(2π(904e6+fIF)t)
904 MHz Signal
sin(2π(904e6+fIF)t)
1MSPS,16 Bit ADC
1MSPS,16 Bit ADC
20kHz IF to avoid problems with Direct Conversion to DC
12 Bit DAC
Oscilloscope
FPGA
( · )2
( · )2
5000Sample average
200Hz 1 bit feedback to beamformers
Power (i)
Power (i) >? Power(i-1,..,i-M-1) {M=4 for results shown}
time
Pow
er
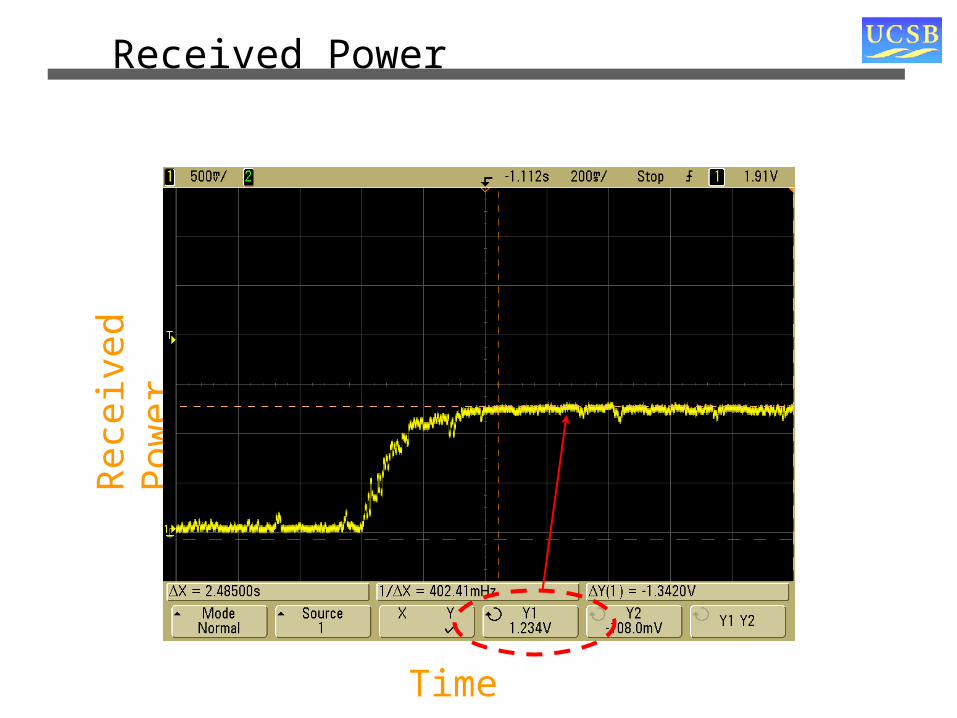
Received PowerR
ecei
ved
Pow
er
Time
Need to get data for this.

Conclusions from prototype
• Distributed beamforming works!
• Key technical challenges– Phase jitter: Highly sensitive to PLL loop-filter
– Power measurement for modulated signals
• Limitations– Small-scale experiment (only 3 transmitters)
– Static channel conditions

Towards an analytical model
• Empirical observation: convergence is highly predictable
y[n+1]
α.y[n] x1
x2
Net effect of phase perturbations
What can we say about the distributions of x1 and x2?(without knowing all the individual transmitter phases)
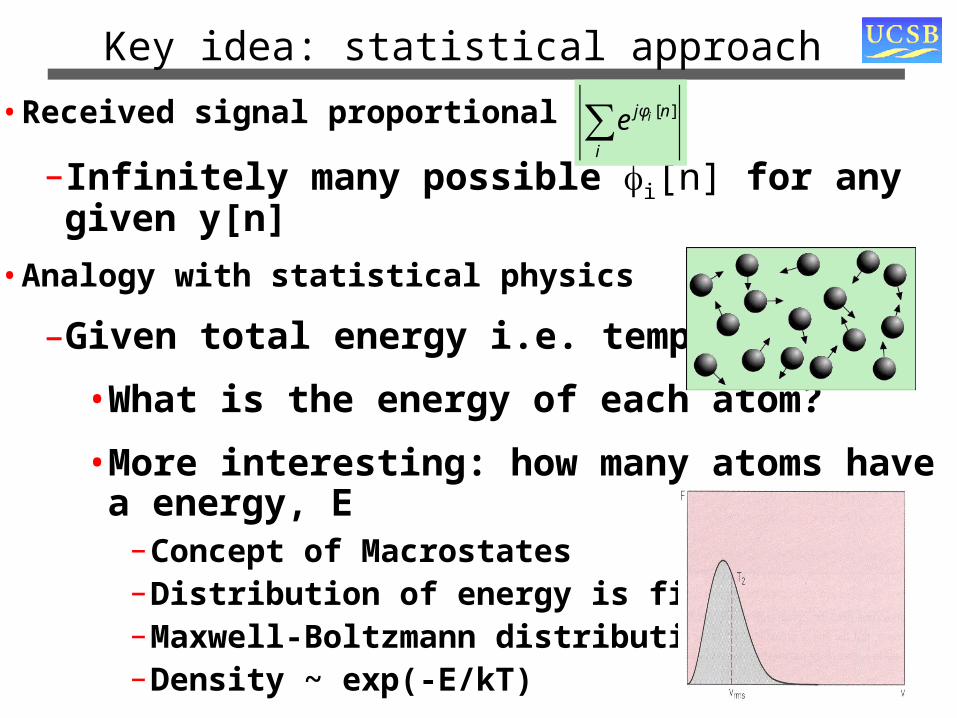
Key idea: statistical approach
•Received signal proportional to
–Infinitely many possible i[n] for any given y[n]
•Analogy with statistical physics
–Given total energy i.e. temperature
•What is the energy of each atom?
•More interesting: how many atoms have a energy, E–Concept of Macrostates–Distribution of energy is fixed–Maxwell-Boltzmann distribution–Density ~ exp(-E/kT)
∑i
nj ie ][φ

The “exp-cosine” distribution
• Initially i[0] is uniform in (-π, π]
• The phases i[n] get more and more clustered
• Given , what is the distribution of i[n]?
– “Typical” distribution closest in KL distance to uniform
– The Conditional Limit Theorem
The “exp-cosine” distribution
€
f (φ) = exp(λ cosφ) /I0(λ )
€
E[cosφ] =I1(λ )
I0(λ )= y[n]/N
€
| cosφii∑ |≈ NE[cosφ] = y[n]
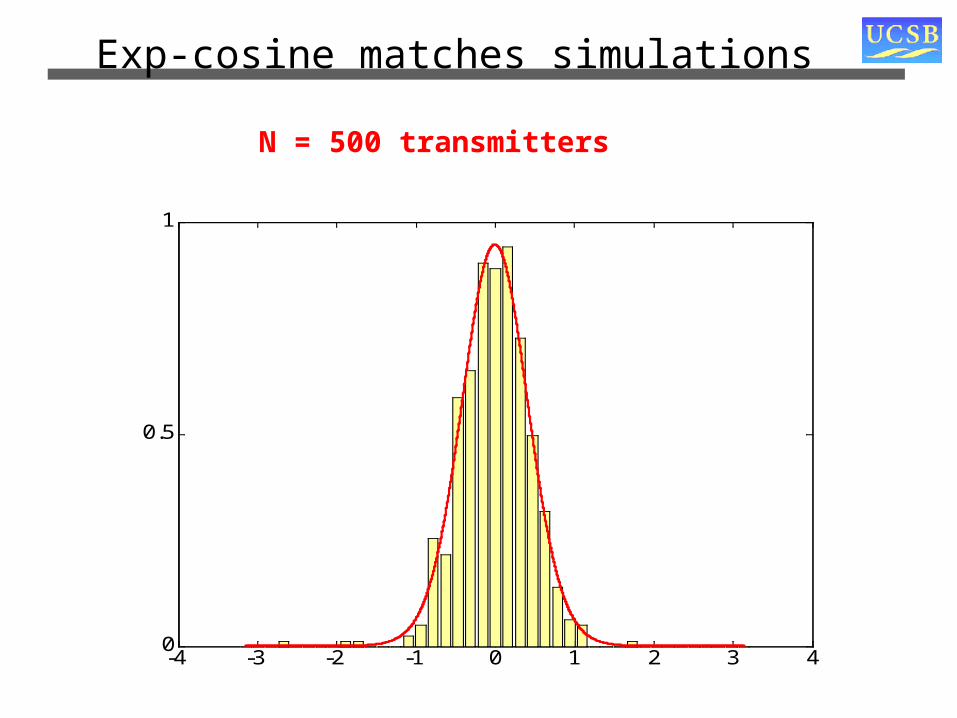
Exp-cosine matches simulations
-4 -3 -2 -1 0 1 2 3 40
0.5
1
Phase Angles in radians
Probability density N = 500 transmitters
Implications of analytical framework
• Accurate analytical predictions for moderately large N
– Evolution of phase distribution
– Convergence rate
• Optimal choice of distribution of phase perturbations
– To maximize convergence rate
• Proof of scalability
– Convergence time linear in N

Accurate prediction of trajectory
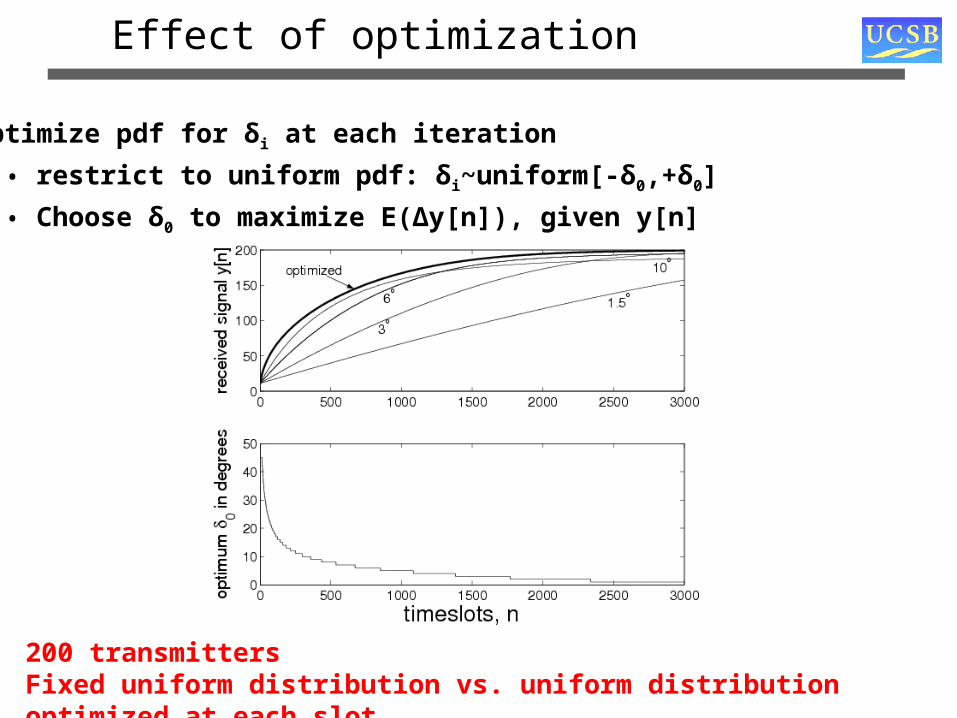
Effect of optimization
200 transmittersFixed uniform distribution vs. uniform distribution optimized at each slot
•Optimize pdf for δi at each iteration
• restrict to uniform pdf: δi~uniform[-δ0,+δ0]
• Choose δ0 to maximize E(Δy[n]), given y[n]
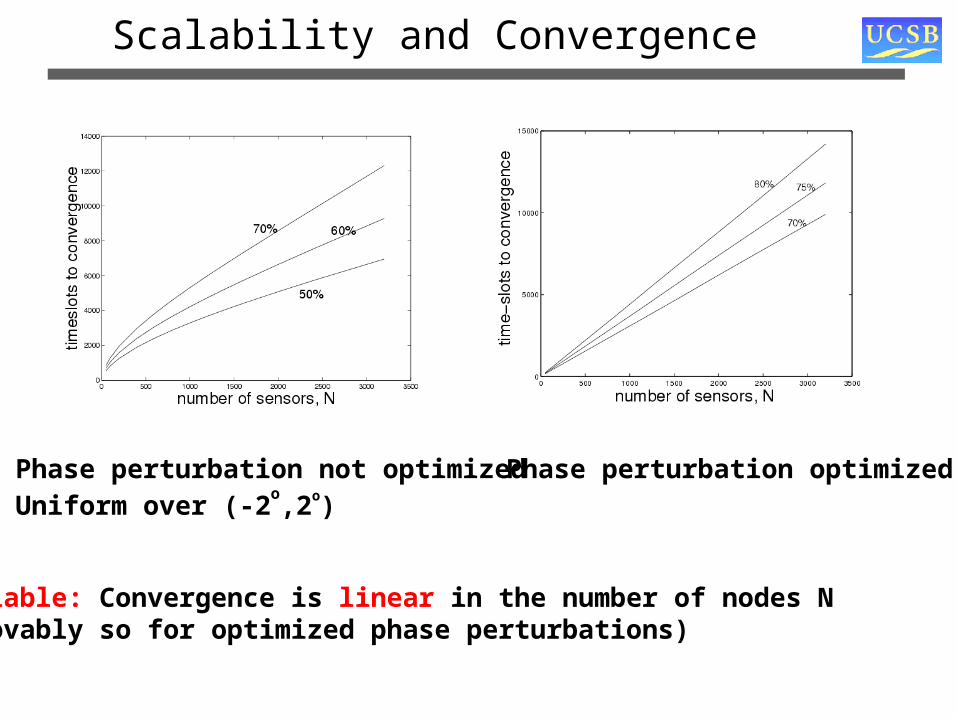
Scalability and Convergence
Phase perturbation not optimizedUniform over (-2
o,2o)
Phase perturbation optimized
Scalable: Convergence is linear in the number of nodes N(provably so for optimized phase perturbations)
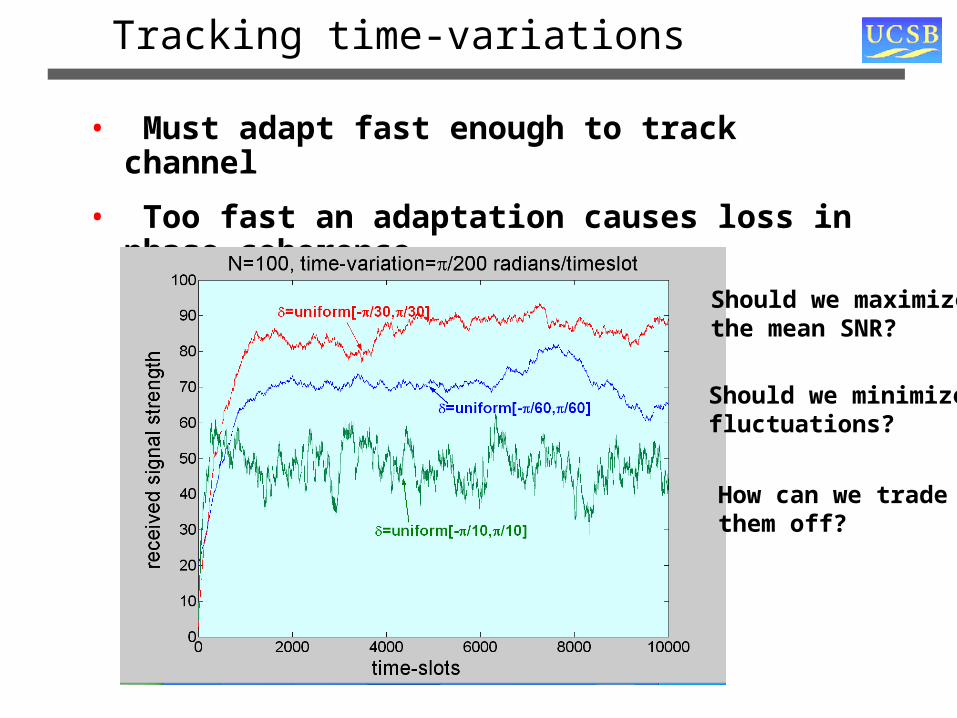
Tracking time-variations
• Must adapt fast enough to track channel
• Too fast an adaptation causes loss in phase coherence
Should we maximizethe mean SNR?
Should we minimizefluctuations?
How can we tradethem off?
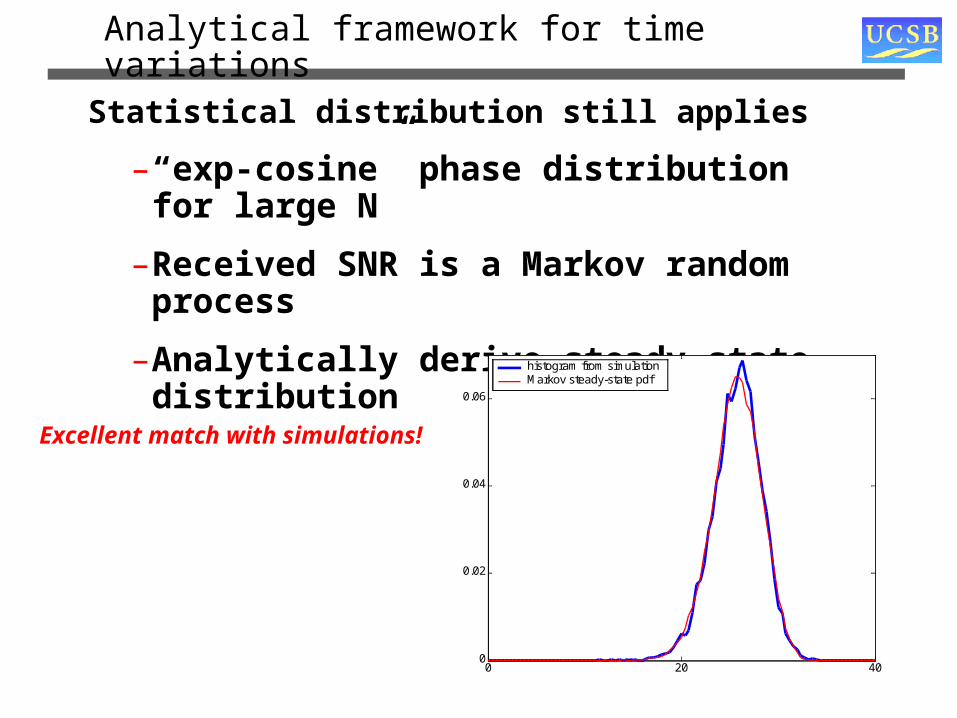
Analytical framework for time variations
Statistical distribution still applies
– “exp-cosine” phase distribution for large N
– Received SNR is a Markov random process
– Analytically derive steady-state distribution
0 20 400
0.02
0.04
0.06
Prob. density, f
ss(
y)
received signal strength, y
histogram from simulationMarkov steady-state pdf
Excellent match with simulations!
Distributed Beamforming: Current Status
• We now know it works
– 3 node prototype gives 90% of maximum possible gains
• Analytical framework accurately predicts performance
– Need simple rules of thumb for time-varying channels
– Better justification of exp-cosine derivation
• Applications go beyond sensor nets
– Wireless link protocols building on distributed beamforming?
• Generalization to other distributed control tasks?
Tracking with binary proximity sensors
Tracking with binary sensors
• Minimalistic model appropriate for microsensors
– Sensor says target present or absent
– Appropriate for large-scale deployments
• How well can we track with a network of binary sensors?
– Fundamental limits
– Minimal path descriptions
– Efficient geometric algorithms

The Geometry of Binary Sensing
Target Path
Sensor Outputs
Localization patches
Localization arcs

Results
• Attainable resolution ~ 1/(sensor density*sensing range)
• Spatial low pass filtering
– Path variations faster than resolution cannot be tracked
– We can track “lowpass” version of the path
• OccamTrack algorithm
– Constructs minimal piecewise linear path representations
– Provides velocity estimates for “lowpass” version
• Robustness to sensing range variation
– Original OccamTrack can get into trouble
– Particle filtering algorithm + Geometric clean-up
• Lab-scale experiments
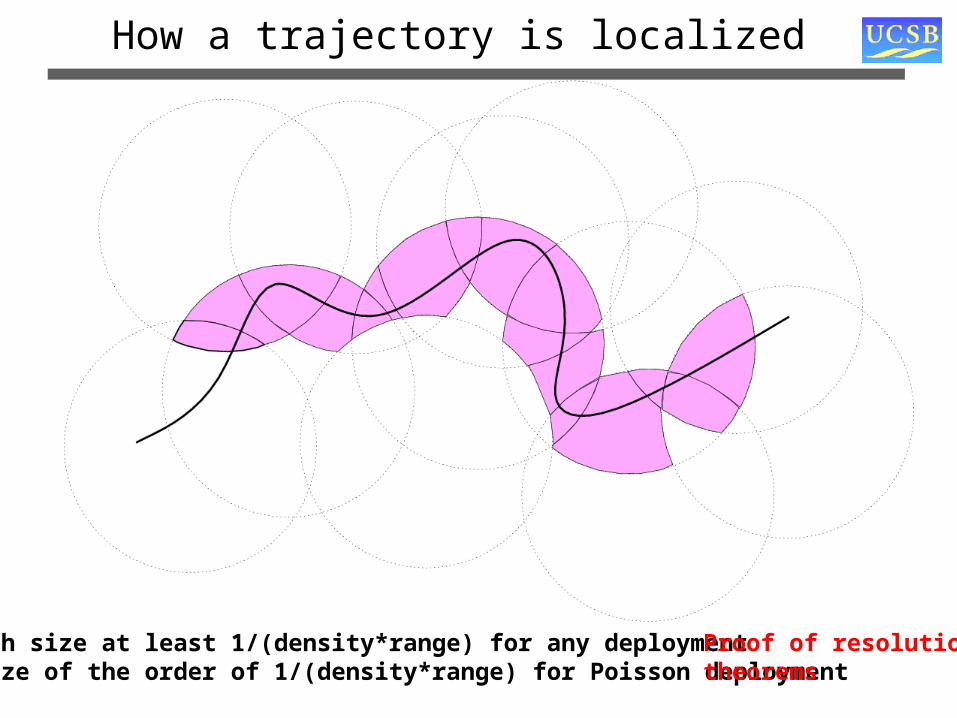
How a trajectory is localized
Max patch size at least 1/(density*range) for any deploymentPatch size of the order of 1/(density*range) for Poisson deployment
Proof of resolutiontheorems

Minimal representation: OccamTrack
Greedy algorithm for piecewise linear representation:Draw lines stabbing localization arcs that are as long as possible

Spatial Lowpass Filtering
Cannot capture rapid variationsCan only reconstruct “lowpass” version of pathJustifies piecewise linear representation

Velocity estimation and minimal representation
Which path should we use to estimate (lowpass version of) velocity? We can be off by a factor of two! A simple formula: dv/v = dL/LProposition: If piecewise linear approx works well, then velocity estimate is accurate.
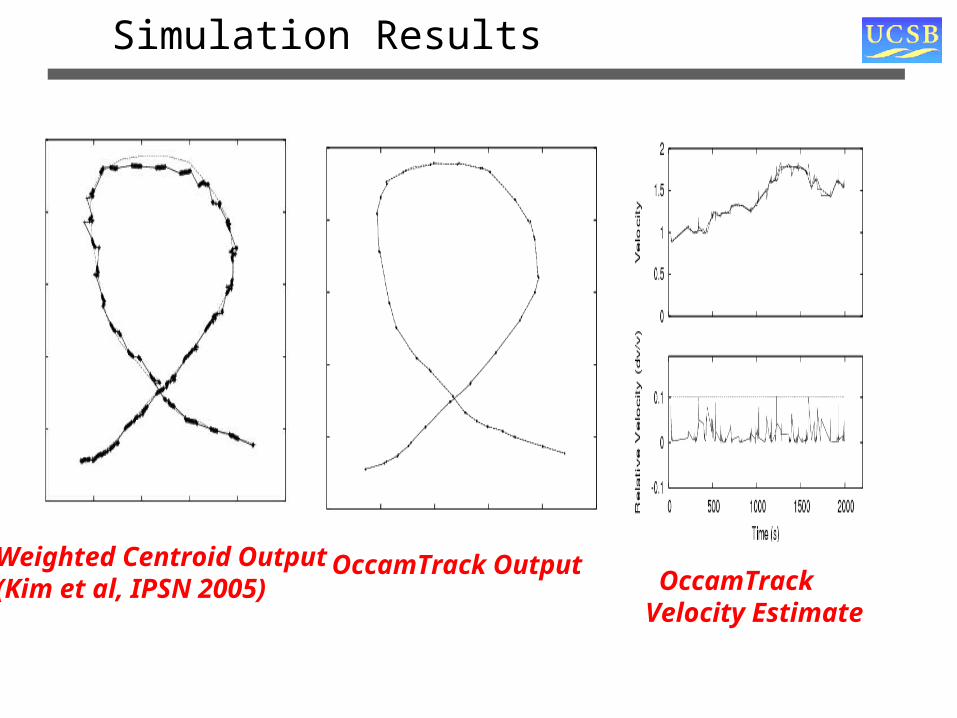
OccamTrackVelocity Estimate
OccamTrack OutputWeighted Centroid Output(Kim et al, IPSN 2005)
Simulation Results
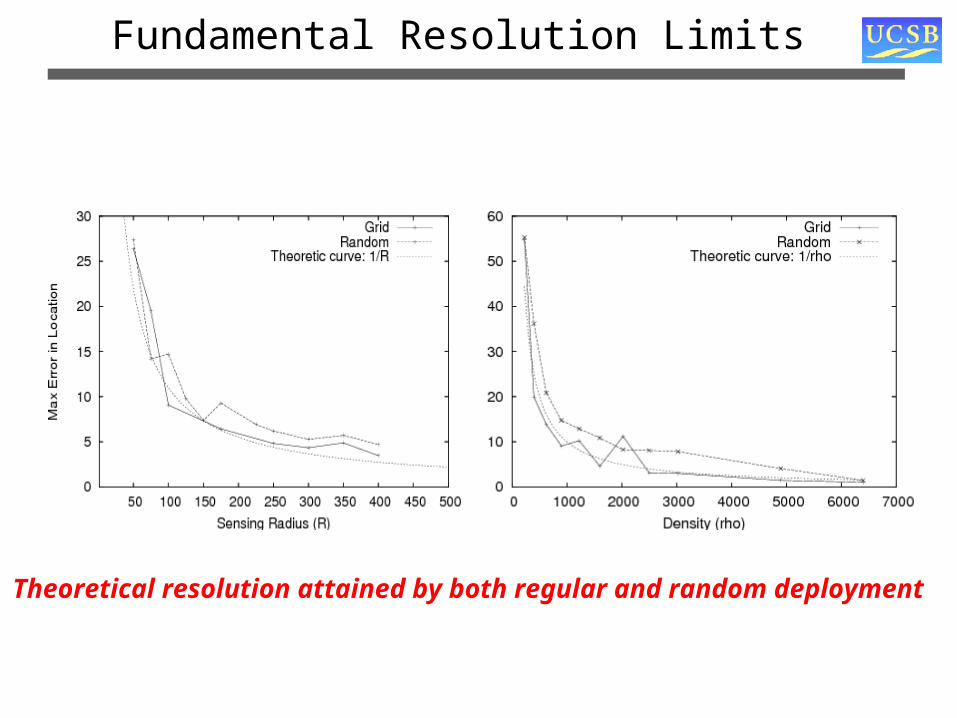
Fundamental Resolution Limits
Theoretical resolution attained by both regular and random deployment

Handling non-ideal sensing
Detected
Not detected
?
A simple model
Localization patch = intersection of outer circles with complements of inner circlesParticle filtering algorithm provides robust performanceGeometric clean-up provides minimal description
Acoustic sensors are unreliable & unpredictable
Low pass filterobservations
Experiment with acoustic sensor
Lab scale mote experiment
Acoustic sensors, tone generator
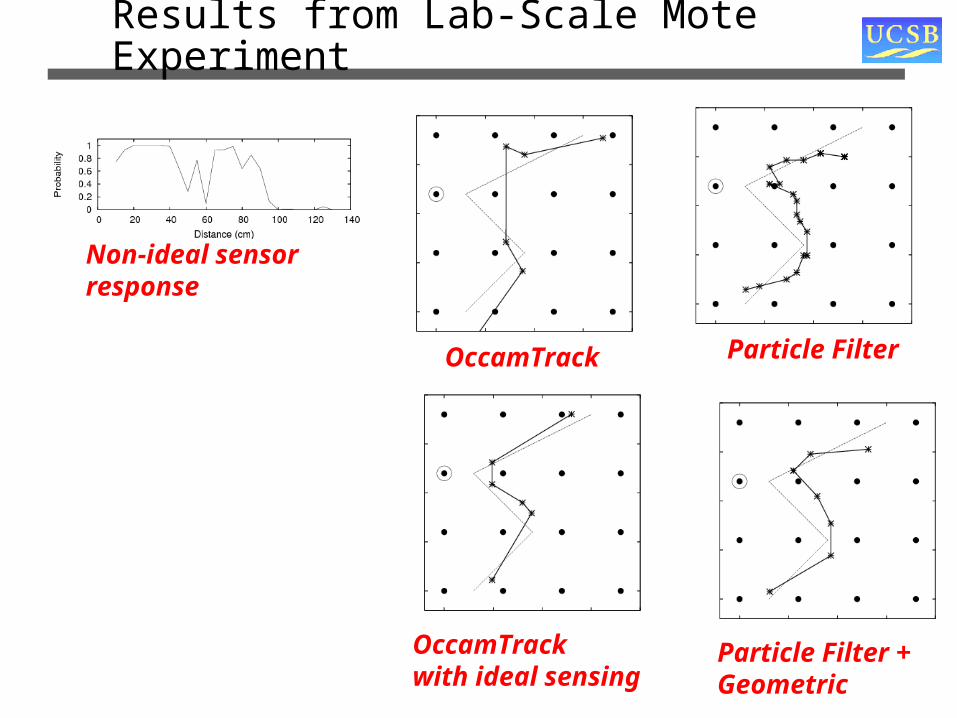
OccamTrack Particle Filter
Particle Filter +Geometric
OccamTrack with ideal sensing
Results from Lab-Scale Mote Experiment
Non-ideal sensorresponse

Tracking with Binary Sensors: Current Status
• Low-cost microsensors can be very useful for tracking
– Small range can be compensated for by dense deployment
– Random deployment works
– Fundamental limits identified and attained
– Algorithms can be made robust to non-ideal sensing
• Current work focuses on multiple targets
– Can we count them reliably?
– How well can we track?
Challenges ahead: a sampling
• Sensor Networks
– Imaging Sensor Nets: making them happen
– Architectures for in-network processing and collaboration
– Comprehensive solutions for flagship applications
– The role of distributed control
– Visual sensor networks
• Ultra high-speed communication
– Cross-layer design of mm wave networks
– The ADC bottleneck
• Multihop multimedia comm
– Video through the home
– Voice in emergency plug-and-play networks