mission-driven perception and autonomy software
TRANSCRIPT

Mission-Driven Perception and Autonomy Software Development for Air Systems
June 11th, 2021
Bernard Dion, Max Najork, Nicolas Dalmasso, Mazen El Hout

2
Agenda
1. Target Applications and Objectives
2. Technical Architecture and Workflows
3. Summary and Benefits
Back-up slides:
Proposed Demo Use Case
Technical Architecture And Scheduling
Customization of Flight Dynamics
Certifiable AI-based Workflow

Targeted Applications and Objectives
3

4
Targeted Applications
1. Air Vehicle Management Systems
2. Formation Flying & Swarming
3. Manned-Unmanned Teaming
4. UAM & EVTOL Systems and Operations
5. Air-to-Air Refueling
6. Landing on Aircraft Carrier in the Sea
7. Mission Optimized Engine Controllers
8. Missile Threat Neutralization
9. Satellite Space Controls & Missions
10. Planet Discovery Robot Mission
…
Selected for demo material

5
Automation increases sensor and software contribution to mission success
Mismatch
Costly and time-consuming iterations as operational feedback is received mainly after the development of the system
PlatformDeveloped
Air Vehicle Developer
Operational Need
Air Vehicle Operator

6
Mission-driven Perception and Autonomy Software Development
Mission ModelSTK
Sensor Simulation VRXPERIENCE
Mission and Control Software
SCADE
PlatformDeveloped
Air Vehicle Developer
Agile validation and adjustment of the system through digital reference models
Develop autonomy function
Analyze operational merit
Operational Need
Air Vehicle Operator
Digital and Executable System and Mission Representation

7
Connecting Digital Mission Engineering and Platform Development
Concept of Operations Development V&V Training Mission Planning and Execution
Digital Mission Engineering
Classical Dev and V&V Tools
Enabling Continuous Digital Thread Across the full Product Life-cycle
Mission-driven Platform Development Digital Mission Planning and Execution

Use Cases, Solution Architecture, and Workflows
8
9
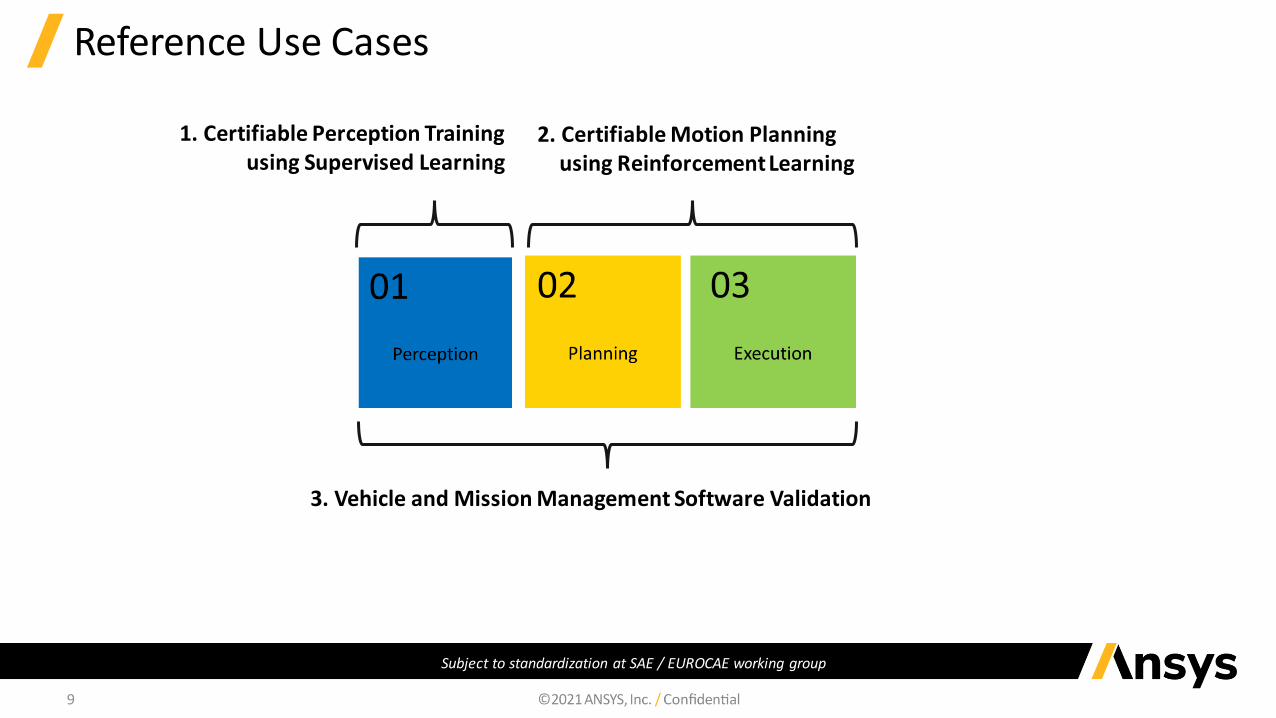
Reference Use Cases
Subject to standardization at SAE / EUROCAE working group
3. Vehicle and Mission Management Software Validation
1. Certifiable Perception Trainingusing Supervised Learning
2. Certifiable Motion Planning using Reinforcement Learning

10
Ansys Modeling and Simulation Ecosystem for Embedded Systems
Fully modular and extendable to fit the individual use case
Mission, World, Platform
STKReinforcement Learning Gym
Labeled Sensor Data for Supervised Learning
Machine Learning & Optimization APIs
Custom Flight Dynamics
…
Custom & Third-Party Models
High-fidelity and Reduced Order Models
Other Ansys
Fluids, Optics, Electronics, Mechanical,
etc.
Probabilistic Scenario Variation
Automatic Scenario Generation
Results Analytics
Simulation Orchestration optiSLang
Scenario Orchestration
& Analysis
Camera
LidarRadar
Virtual Reality
VRXPERIENCE
Sensors & HMI
SCADE
Embedded Software
Mission & Vehicle Management Software
Display Software

11
Certifiable Perception Training using Synthetic DataUse Case 1
STK & VRXPERIENCE Third Party SCADEoptiSLang
optiSlang & VRXPERIENCE Sensors
Cam
era
LID
AR
Ra
da
r
Prepare Scenario Generate Data Train Model Validate Model Generate Safe Code
Subject to standardization at SAE / EUROCAE working group

12
Simulating Physics-Based Sensors in Mission Context

13
Fully automated synthetic data and label generation pipeline
Images are automatically created and labeled (bounding box, segmentation, positions, any other simulation ground truth)
Inference result after training on VRXPERIENCE images
High accuracy data and labels based on ground truth informationNo need for manual labeling or additional processing

15
Certifiable Motion Planning using Reinforcement LearningUse Case 2
STK & VRXPERIENCE
VRXPERIENCE, optiSLang, SCADE
+ Third Party SCADEoptiSLangSCADE
Prepare Scenario Implement Agent Train Model Validate Model Generate Safe Code
Embedded Software
Reward Function
Subject to standardization at SAE / EUROCAE working group

16
Flight example 1: Robustness against disturbances
Operating VTOL vehicle automatically maintains position at waypoint despite perturbations by stick.
System performs despite manual perturbations

17
Vehicle and Mission Management Software Validation Use Case 3
SCADE, STK, VRXPERIENCE SCADE
STK & optiSLangSCADE
Prepare Scenario Implement SW Run Simulation Validate Model Generate Safe Code
Embedded Software
STK & VRXPERIENCE
Embedded Displays Virtual Reality Experience

18
Formation Flying with Actual Vehicle Control SW
Other Queries:• Communications
Filtering• Multi-hop
Communications• Sensor Coverage• Jamming• Radar Signature• Terrain Masking• Navigation
Accuracy• Terrain Following• Etc.

19
Implementing and Simulating SW
Formation Manager
Flight Management
Flight Guidance
Auto Pilot
Flight Control
Engine Control
FlyBy Mode
Hold Mode
Formation Mode

Summary and Benefits
20
21
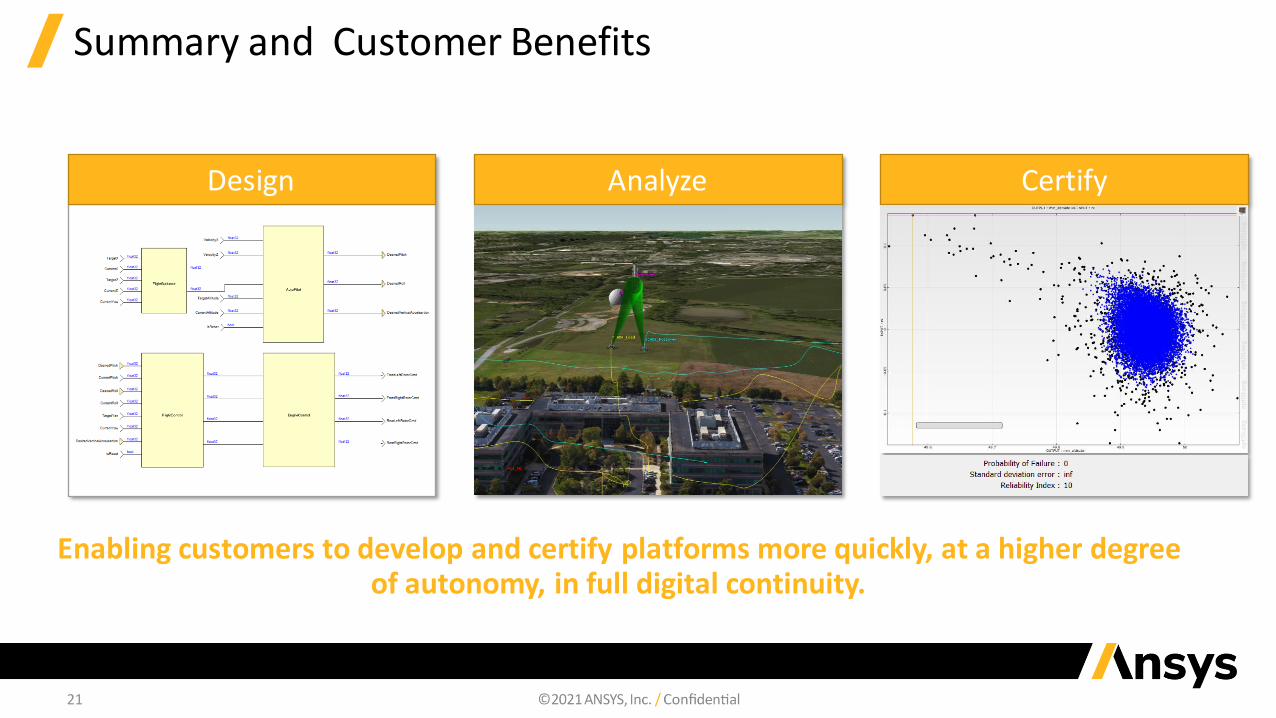
Summary and Customer Benefits
Enabling customers to develop and certify platforms more quickly, at a higher degree of autonomy, in full digital continuity.
Design CertifyAnalyze
