model-based design of connected and autonomous vehicles file3 model-based design (mbd) § analyze...
TRANSCRIPT

1© 2017 The MathWorks, Inc.
Model-Based Design of Connected and Autonomous Vehicles
Akshay Rajhans, PhD
Senior Research ScientistAdvanced Research and Technology OfficeMathWorkshttps://arajhans.github.io
2nd IEEE Summer School on Connected and Autonomous Vehicles May 19, 2017

2
How do we design safe and reliable cyber-physical systems ?
3
Model-based design (MBD)
§ Analyze and understand the requirements specification§ Develop computational model(s) of the system
– Check the model against the real system § ``are you are building the right thing?'' (validation)
– Check the model against specifications§ ``are you building it right?'' (verification)
§ Build a prototype – test the prototype in the actual working environment
§ Production

4https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/812384
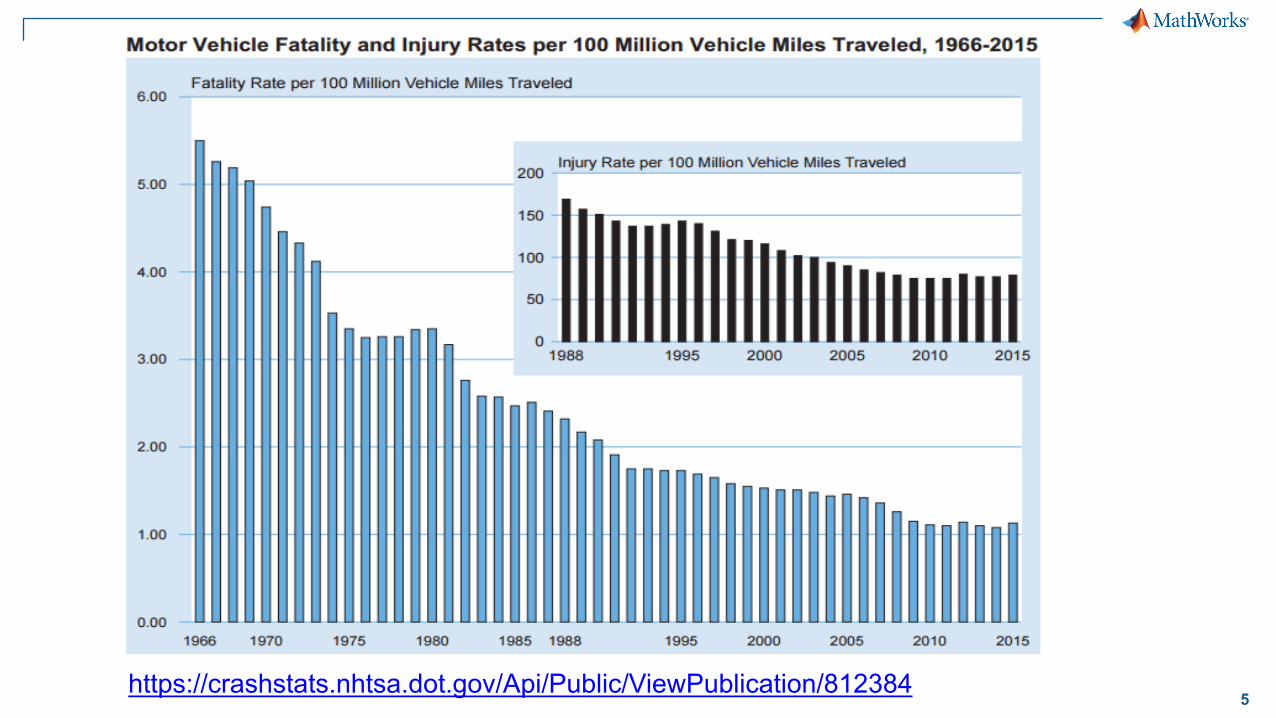
5https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/812384

6https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/812384

7https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/812384
?
?

8
Cooperative Intersection Collision Avoidance System: Stop-Sign Assist (CICAS-SSA)
http://www.dot.state.mn.us/guidestar/2006_2010/cicas/CICAS-SSA%20Report%202.pdf
Can we assist in the decision making?
99
gap lag
Y
n lanes
lag
Intersection areaInstrumented area
à
ß
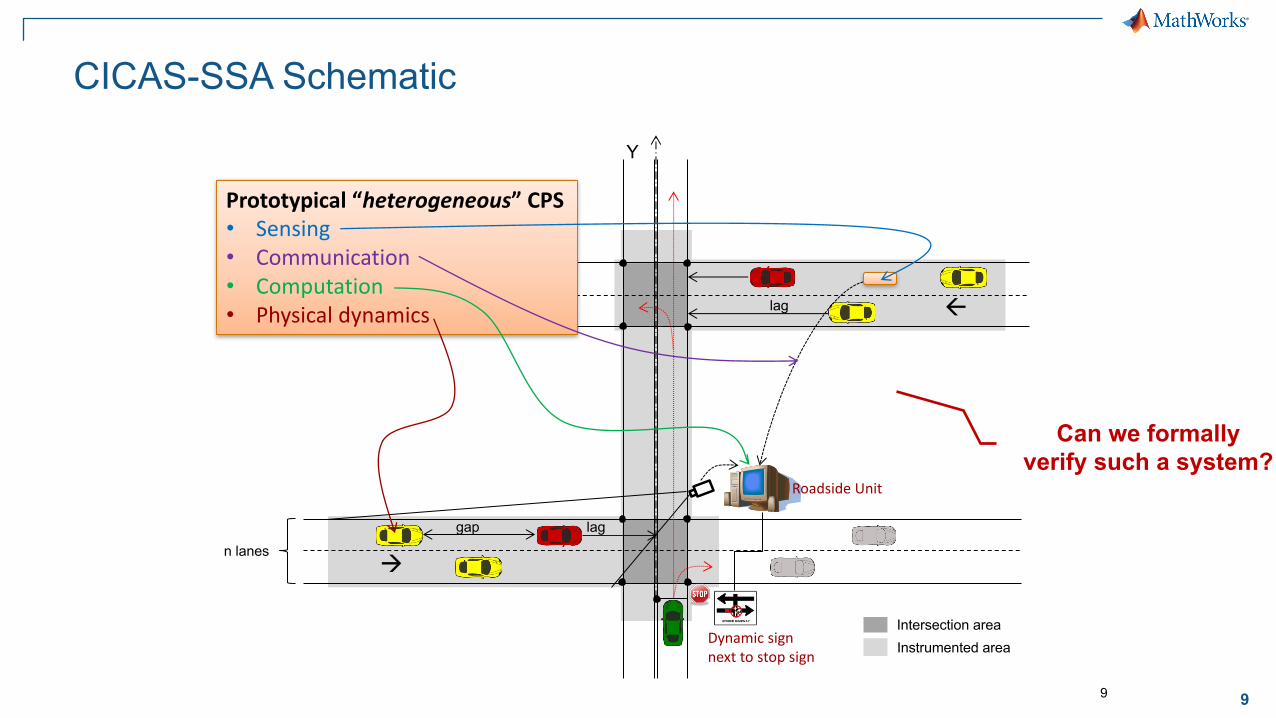
Prototypical“heterogeneous”CPS• Sensing• Communication• Computation• Physicaldynamics
RoadsideUnit
Dynamicsignnexttostopsign
CICAS-SSA Schematic
Can we formally verify such a system?

10
Model Specification
Formal Verification
Analysis Procedure
NoYes Don’t Know
Withformalguarantee Counterexampleorsomefeedback

11
Model SpecificationFormal Verification
Analysis Procedure
NoYes Don’t Know
Withformalguarantee Counterexampleorsomefeedback

12
Heterogeneity in modeling formalisms and analysis techniques
• Differentformalismssuitedfordifferentaspectsofsystemdesign• Eachmodelrepresentssome designaspectwell• Modelsmakeinterdependentassumptions• Tools workonlywiththeirformalismsHowdoweensurecorrectnessofthesystem?
CICAS-SSA

13
Cyber-Physical System Architecture
Thereisnosystemmodel,butthereisasystemarchitecture
CPSarchitecturalstylepaletteinAcmeStudio
MPM‘09
14
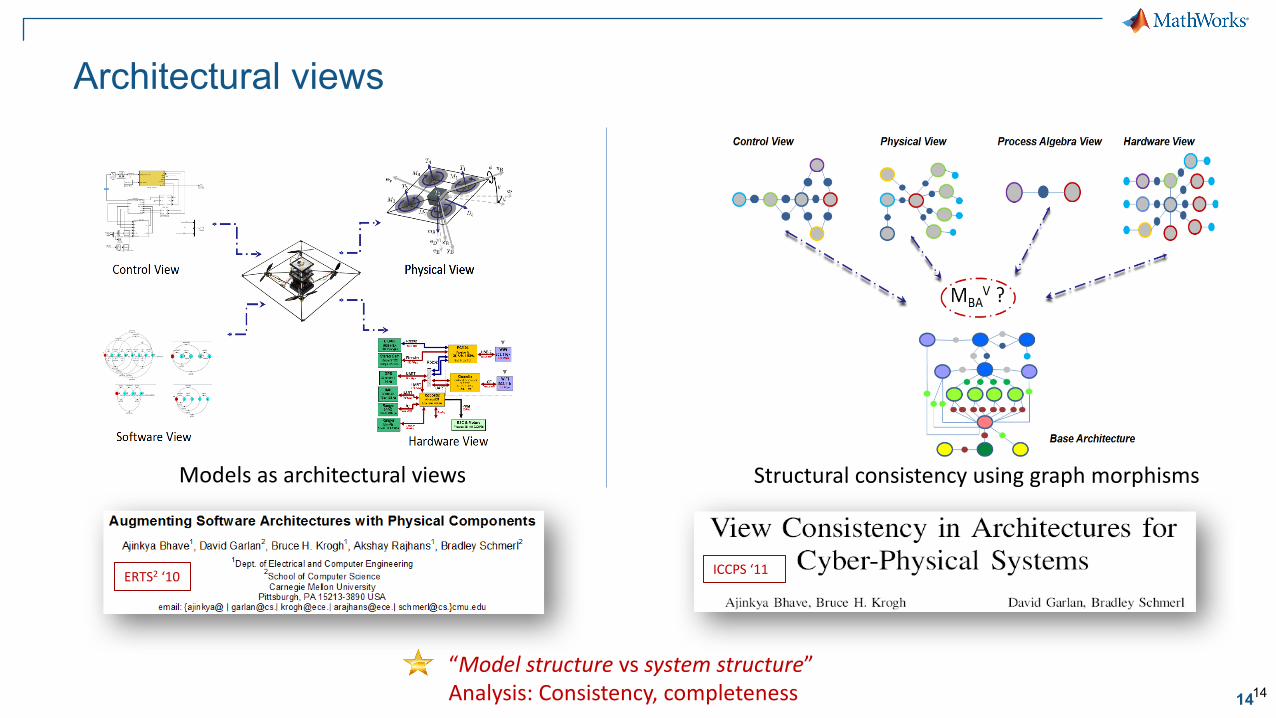
Architectural views
14
Modelsasarchitecturalviews Structuralconsistencyusinggraphmorphisms
“Modelstructure vssystemstructure”Analysis:Consistency,completeness
ERTS2 ‘10 ICCPS‘11

15
Semantic domains of models and specifications
Model MAbehaviorb thatM exhibits
:“semanticinterpretation”ofM inabehaviordomainB
BehaviordomainsB preciselydefinedinbehavior formalisms B (e.g.,discretetraces,continuoustrajectories,hybridtraces)
Specification S
:“semanticinterpretation”ofS inB
1)“overshootisnomorethan1.3unitsandsettlingtimeislessthan𝜏”
2)□(x<1.3)∧⋄ τ (x ∈ [1±ϵ])
1.3
Abehaviorb thatS allows
±ϵ
τ
1
x
time

16
The semantic domain of a dynamic system
§ Points, [ ]– On N
– On R x N § Intervals, [ ñ (á ñ, á ])
– On R§ Hybrid point/interval
– On R
– On R x N
MATLAB, Stateflow
Discrete time Simulink
SimEvents
Simulink
Simulink, Simscape
Simulink, Simscape

17
Abstraction and Implication
§ Model M1 abstracts M0 in B, written
if
§ Specification S1 implies S0 in B, written
if

18
Mappings between semantic domains via behavior relations
§ Approach: Create “behavior relations” between domains
B0:1-dcontinuoustrajectoriesinx
R1⊆ B0XB1
B1={𝛼,𝛼,}*∪{𝛼,𝛼,}𝜔
GivenR1⊆ B0XB1set-basedinversemapR1-1 (‘α’)={c,d,…}

19
Heterogeneous Abstraction and Implication
§ Heterogeneous extensions of behavior-set inclusions
(inwords)
C
(pictorially)
Detailedlevel
HeterogeneousAbstractlevel
A
C
B
A
B

20
Multi-model Verification Problem
21
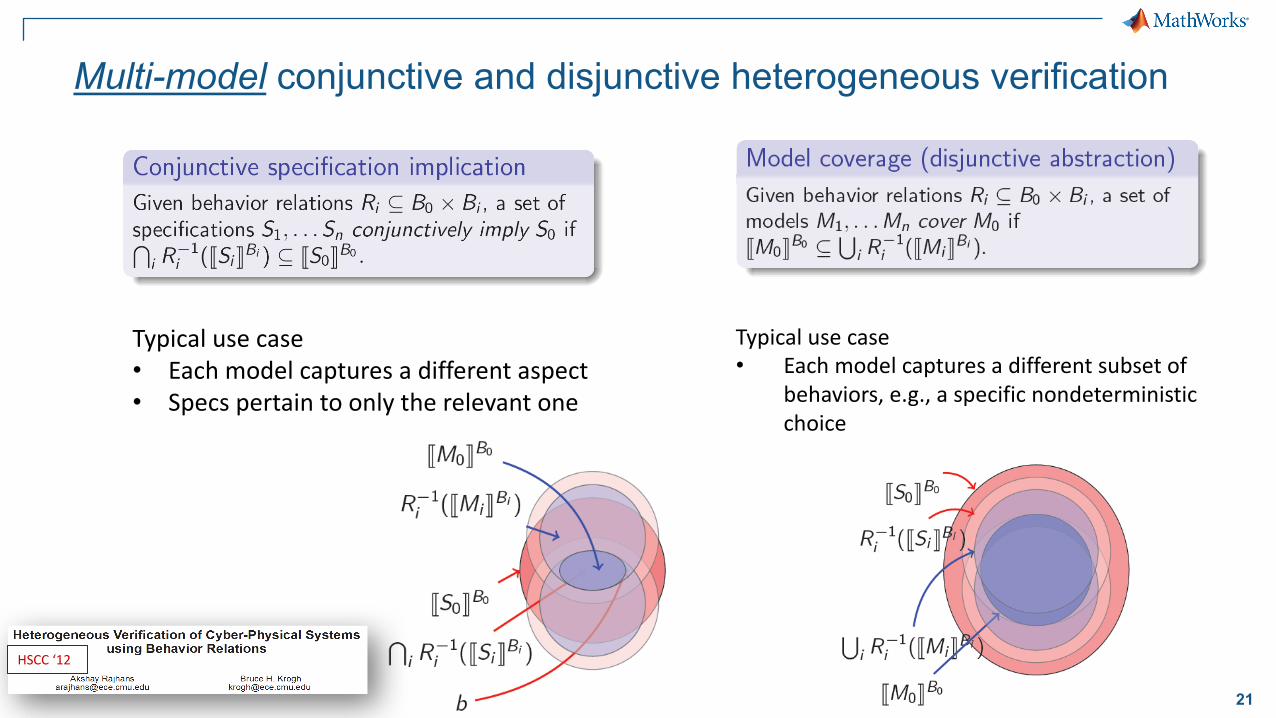
Multi-model conjunctive and disjunctive heterogeneous verification
Typicalusecase• Eachmodelcapturesadifferentsubsetof
behaviors,e.g.,aspecificnondeterministicchoice
Typicalusecase• Eachmodelcapturesadifferentaspect• Specspertaintoonlytherelevantone
HSCC‘12

22
Hierarchical Verification
Conjunctive and disjunctive verification constructs can be nested arbitrarily

23
Verification model with hybrid dynamics
Computation modelDriver behavior model(empirical information)
Sensing model Communication model
“Universal” system model(cannot be created in practice)
/\
/\ conjunctive abstraction\/ disjunctive coverage\/* discrete coverage with
inter-model switchingModel infoSpec
Communication delaySensing errorComputation timeDriver response time
SV and another car notin the intersectionat the same time
SV and another car not in the intersection at the same time
\/
N models withone lane each
/\ SV and POV notin the intersectionat the same time
/\ /\
\/*
POV SVDiscreteProtocol
/\
Time-to-exit-intersectionTime-to-
intersection Order
Single POV (POV initial condition safe)
Single POV (POV initial condition unsafeOnly stay stopped)(trivially safe)
SV and POV notin the intersectionat the same time
SV and POV notin the intersectionat the same time
… … …… ……
Heterogeneous Verification of CICAS
Node13
Node22Node21 Node23

24
Verification Problem
Verificationobjective:“SVandanothercarareneverintheintersectionatthesametime”
MN-dimensionalvector
-
-
-
-

25
Disjunctive Heterogeneous Verification
- -
-
-
-
-

26
Verification model with hybrid dynamics
Computation modelDriver behavior model(empirical information)
Sensing model Communication model
“Universal” system model(cannot be created in practice)
/\
/\ conjunctive abstraction\/ disjunctive coverage\/* discrete coverage with
inter-model switchingModel infoSpec
Communication delaySensing errorComputation time
Driver response time
SV and another car notin the intersectionat the same time
SV and another car not in the intersection at the same time
\/
N models withone lane each
/\ SV and POV notin the intersectionat the same time
/\ /\
\/*
POV SVDiscreteProtocol
/\
Time-to-exit-intersectionTime-to-
intersection Order
Single POV (POV initial condition safe)
Single POV (POV initial condition unsafeOnly stay stopped)(trivially safe)
SV and POV notin the intersectionat the same time
SV and POV notin the intersectionat the same time
… … …… ……
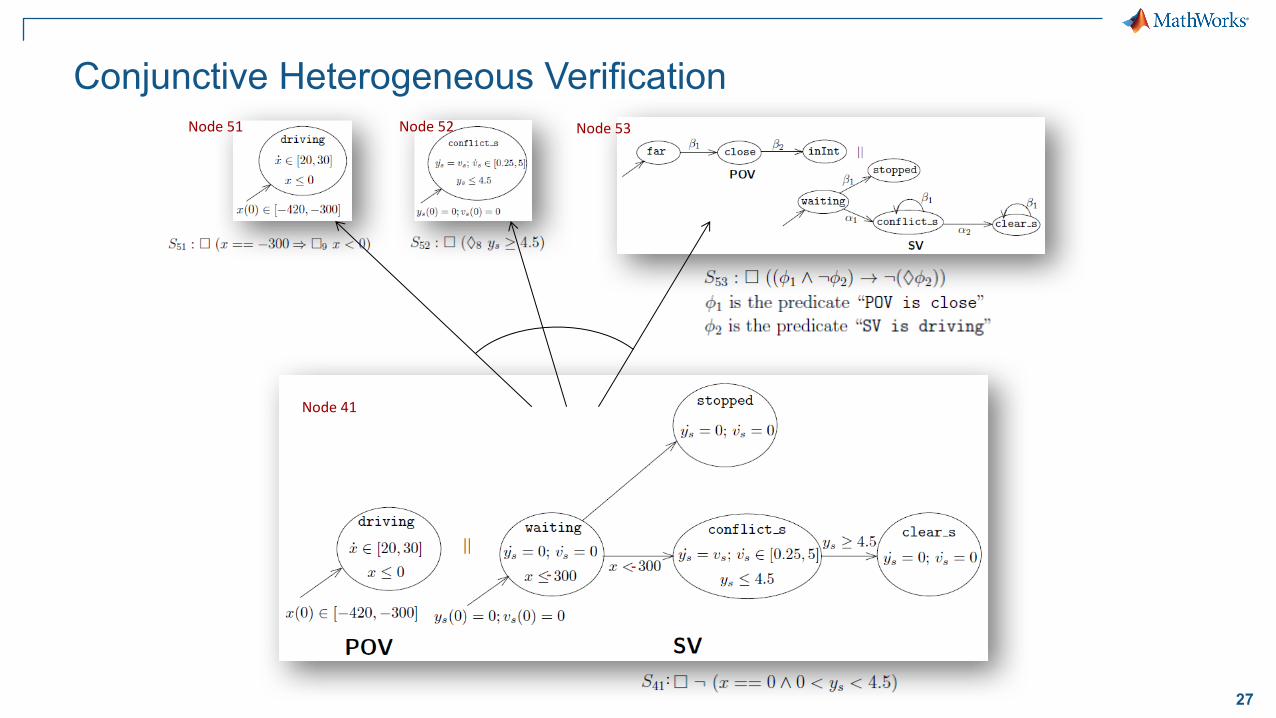
Node41
Node52
Node51 Node53
Heterogeneous verification of CICAS-SSA
27:
Conjunctive Heterogeneous Verification
Node41
Node52Node51 Node53
- -

28
Leveraging Compositionality for Heterogeneous Abstraction
28
Schematic
Objective: Concludeheterogeneousabstractionofthecompositionbyestablishingthatofthecomponents
Rationale: Component’slocalsemanticsdefinedinabehaviordomainofsmallerdimension
Need• Behaviorabstractionfunctions
A :behaviorrelationsthatarealsofunctions
• Mappingsbetweenlocal/globalbehaviordomainsofthesametype
• Mappingsbetweenlocal/globalabstractionfunctions

29
Compositionality Conditions
StartwithA,localize togetAP ,AQ
StartwithAP ,AQ,globalize togetA
IfglobalizationsofAP ,AQ areconsistent(callitA ),thencompositionalheterogeneousabstractionviaA holds
IflocalizationsofA are AP andAQ ,thencompositionalheterogeneousabstractionviaAholds
CentralizedDevelopment
DecentralizedDevelopment
“Modelsascompositionofcomponents”Analysis:CompositionalAbstraction
HSCC‘13

30
Semantic Assumptions as Parameter Constraints
30CDC‘11
Dependenciesthatcutacrossmodelingformalismscanbecapturedasparameterconstraints
Ensuressemantic(parameter)consistencyusingexternalSMTsolversorprovers
Problem• Semanticinterdependencies
acrossformalisms• Consistency
Challenge• Formalrepresentationthatis
universal toallmodelingformalisms
Approach• interdependenciesasan
auxiliaryconstraintonparameters
• Findeffectiveconstraint ongivenmodel/spec.parameters(existentialquantification)
• UseSMTsolversortheoremprovers toproveconsistency
NetworkVerificationPhysics-based SoftwareSenor(look-uptable)
Howfaroffaresensorreadings?
HowfastcantheSVaccelerate?
What’sthecomputationtime?
Howoldarethesensorreadings?

31
Parametric Verification of CICAS
31
HSCC‘12
1.Explicitlyidentifymodelparameterse.g.speedlimits,intersectiongeometry,minimumacceleration,andspec.parameters,e.g.,POVmin.time-to-intersection,SVmax.time-to-clear-intersection
2.Modelinterdependenciesasanauxiliaryconstrainte.g.,thosedictatedbyspeedlimits,newton’slaws andintersectiongeometry ontime-to-intersection,…
3.Projectglobalconstraintsandinterdependencies(aux.constraint)ontolocalsetsofparameters
/\
Provedsemanticconsistencyintheoremprover KeYmaera
32
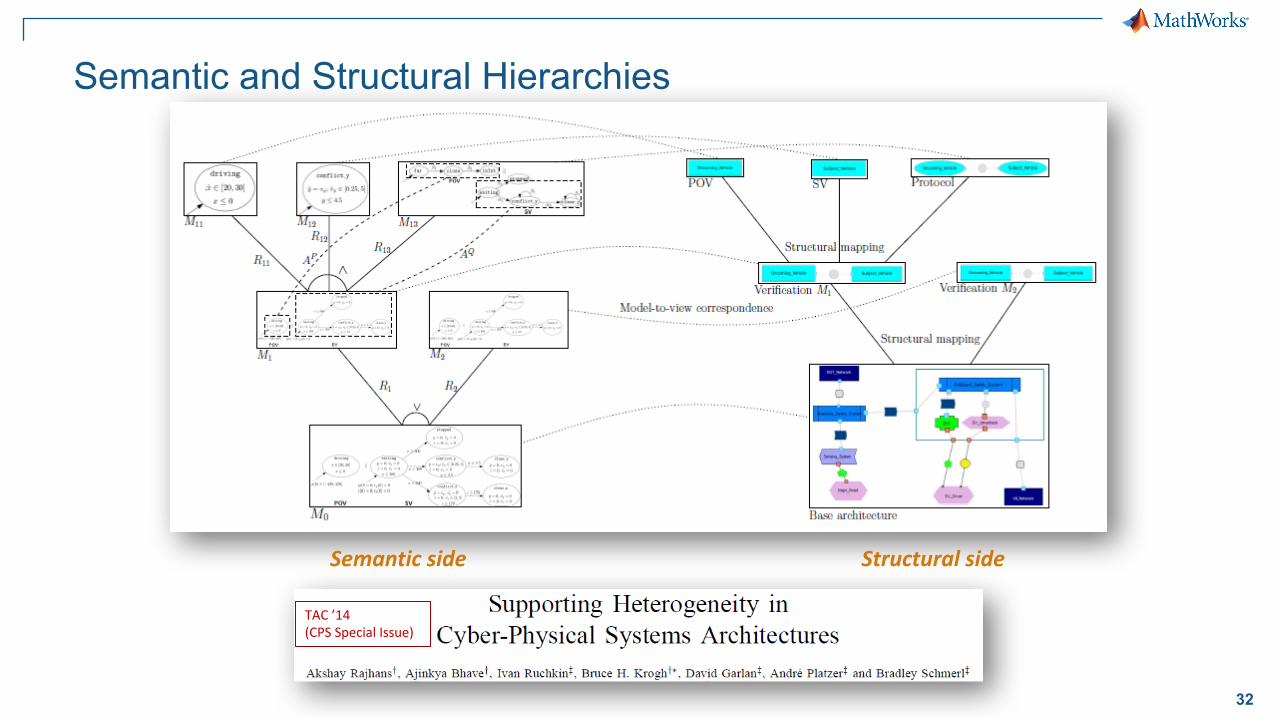
Semantic and Structural Hierarchies
TAC’14(CPSSpecialIssue)
Semanticside Structuralside
33
Summary
Cyber-Physical Systems present a major paradigm shift with systems that are– Adaptive, Autonomous, Connected, and Collaborative
Model-based design critical for safe and efficient design process– Open-ness and heterogeneity pose research challenges
Contributions for supporting heterogeneity in MBD of CPS– Architectural modeling: high-level structural representation [MPM ‘09]– Model structures as architectural views for comparing structure [ERTS ’10]– Semantic mappings using behavior relations enable (compositional) heterogeneous
verification [HSCC ’12, HSCC ’13]– Constraint consistency for consistent simplifying assumptions [CDC ’11, HSCC ‘12]
Many challenges still remain
33

34
References*
34
MPM‘09
ERTS2 ‘10
ICCPS‘11 CDC‘11
HSCC‘12 HSCC‘13
TAC:CPS’13(submitted)
*Otherworkavailableathttps://arajhans.github.io
35
®