model-based optimization of a solar-powered car · model-based optimization of a solar-powered car....
TRANSCRIPT

Clean mobility for everyoneArjo van der Ham – Chief Technology Officer
May 21st, 2019
Model-Based Optimization of a Solar-Powered Car
Clean mobility for everyone
Only 3% live near charging points
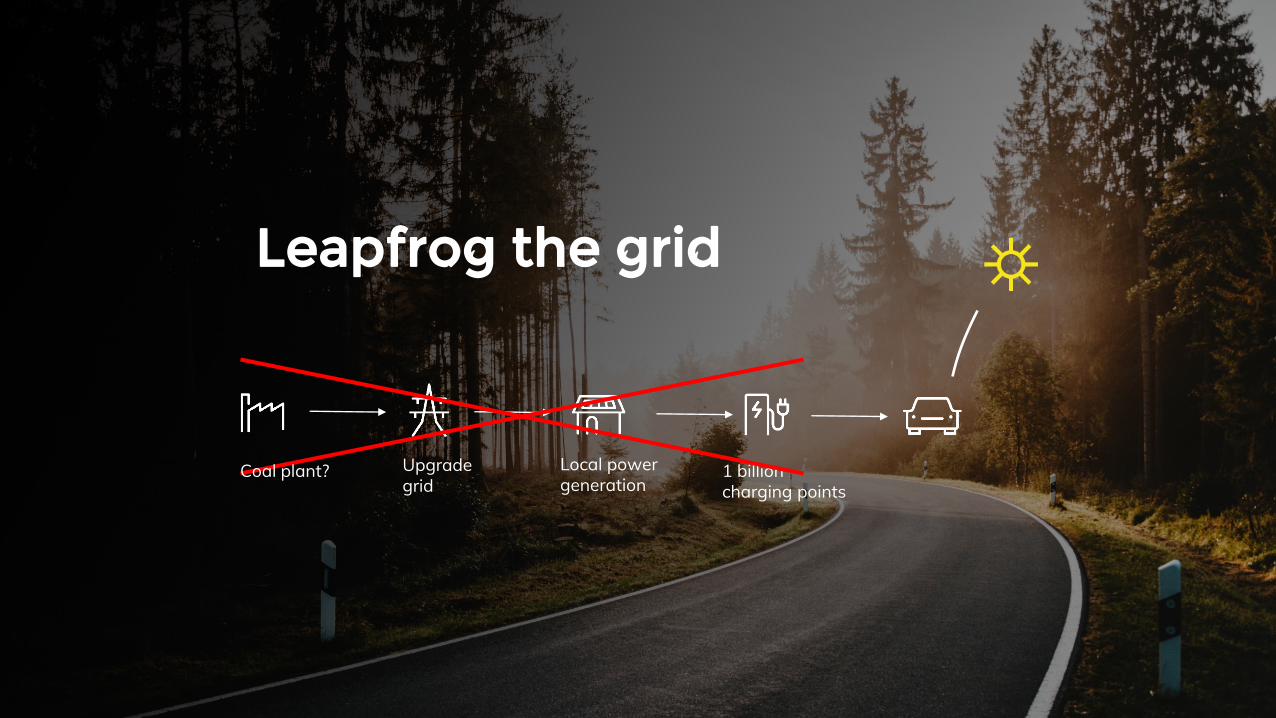
Leapfrog the grid
Local power generation
1 billion charging points
Coal plant? Upgrade grid

Lightyear One
725kmWLTP range
Solar panels on roof and hood
Solar-electric family car
10.000kmSolar range per year, in NL
60kWhBattery
12km/kWhEfficiency

A two week surf trip in Portugal
0Grams of CO2
1.154 kmTotal distance
6Surfspots
0Charging stops

100+ engineers on a mission200+ years of automotive experience

65Early investors
80+Signed reservations
10Signature editions
€119,000Excluding taxes
The first pioneers
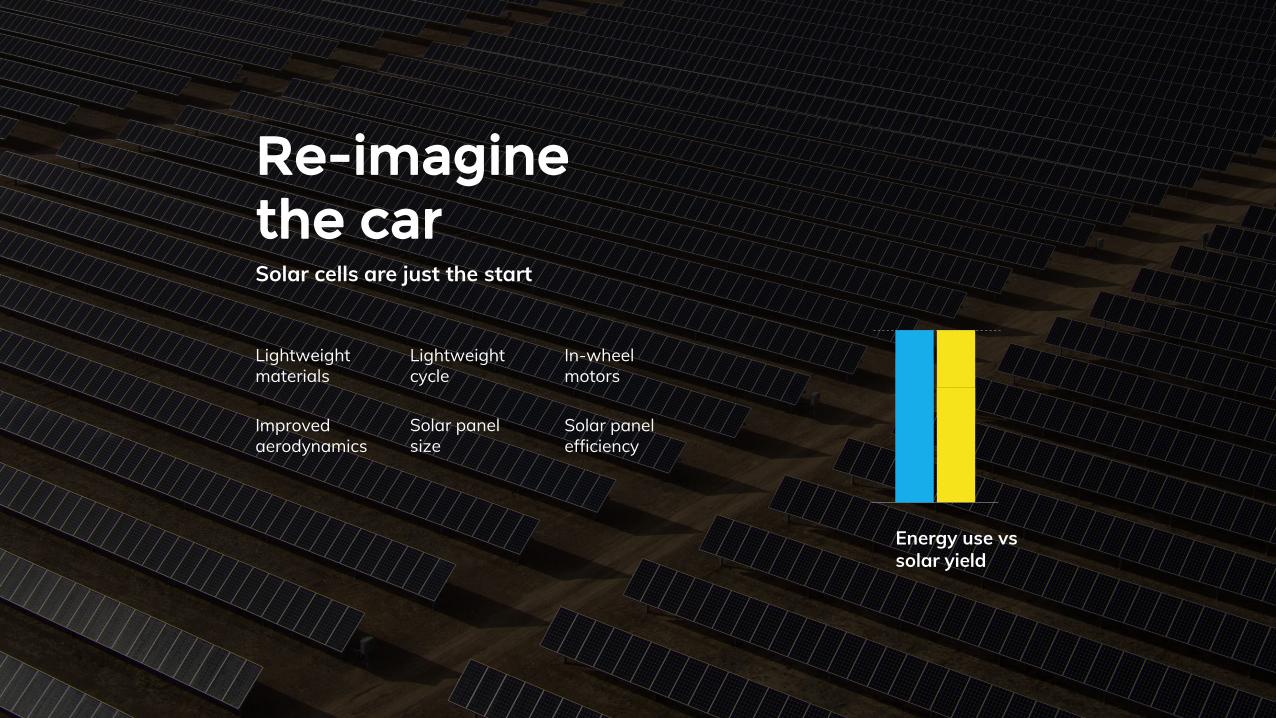
Solar cells are just the start
Energy use vs solar yield
Solar panel efficiency
Solar panel size
Improved aerodynamics
In-wheel motors
Lightweight cycle
Lightweight materials
Re-imagine the car
10
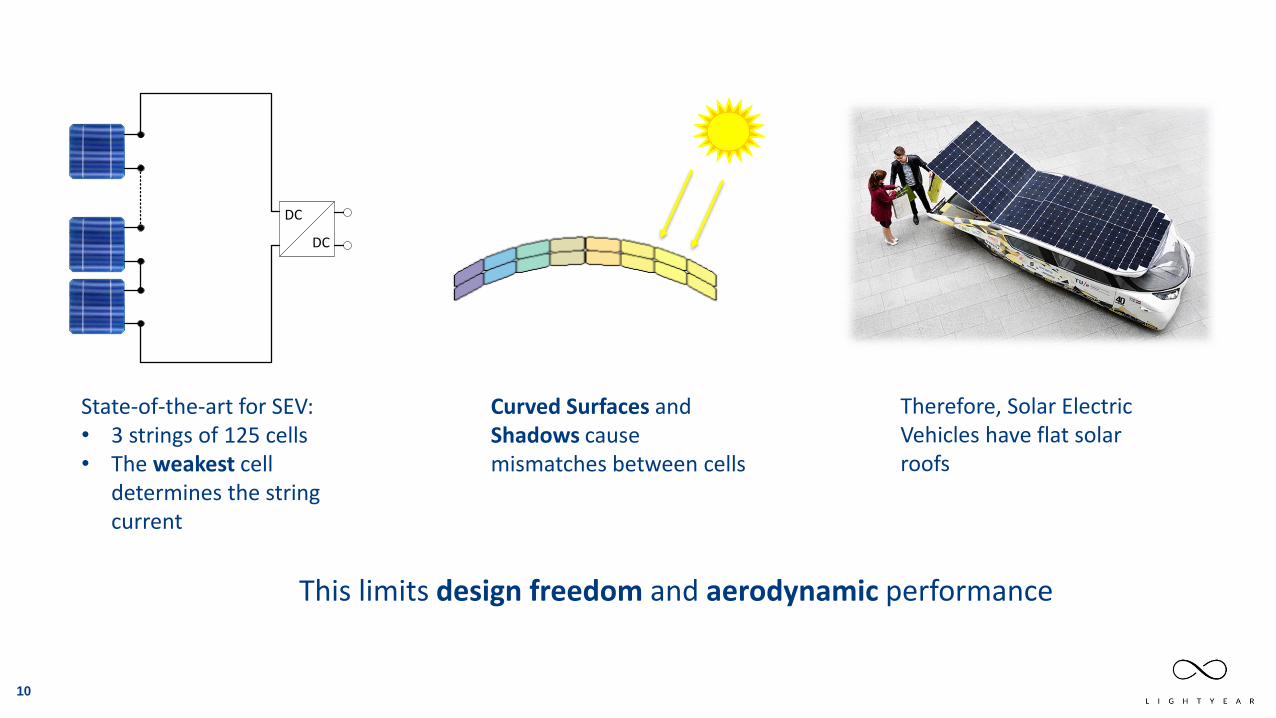
State-of-the-art for SEV:• 3 strings of 125 cells• The weakest cell
determines the string current
Curved Surfaces and Shadows cause mismatches between cells
Therefore, Solar Electric Vehicles have flat solar roofs
This limits design freedom and aerodynamic performance
DC
DC
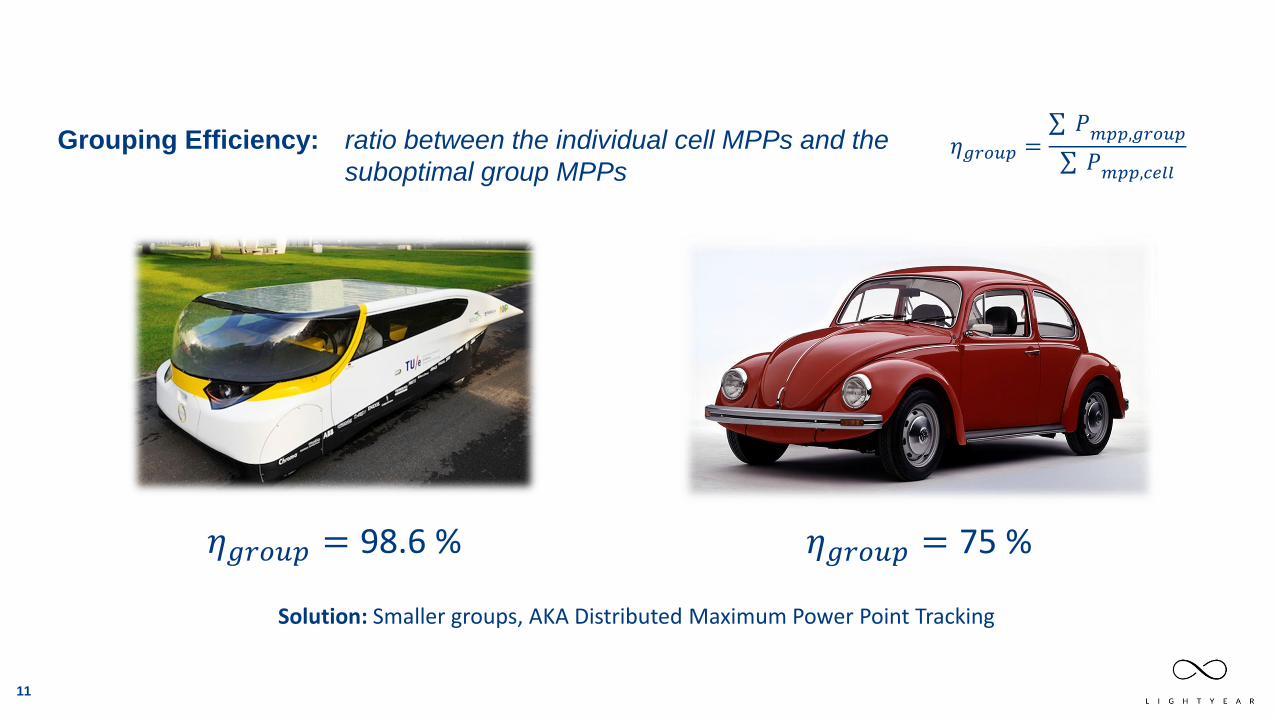
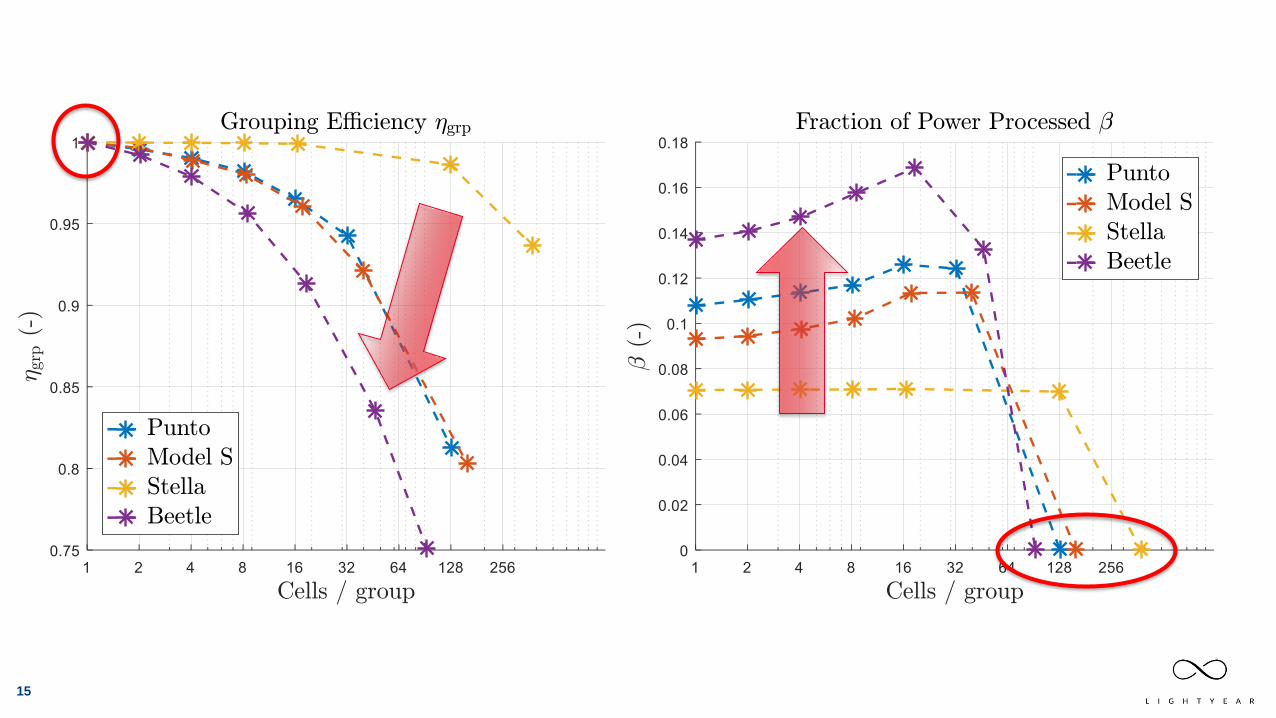
Grouping Efficiency: ratio between the individual cell MPPs and the
suboptimal group MPPs
11
Solution: Smaller groups, AKA Distributed Maximum Power Point Tracking
𝜂𝑔𝑟𝑜𝑢𝑝 =σ 𝑃
𝑚𝑝𝑝,𝑔𝑟𝑜𝑢𝑝
σ 𝑃𝑚𝑝𝑝,𝑐𝑒𝑙𝑙
𝜂𝑔𝑟𝑜𝑢𝑝 = 75 %𝜂𝑔𝑟𝑜𝑢𝑝 = 98.6 %
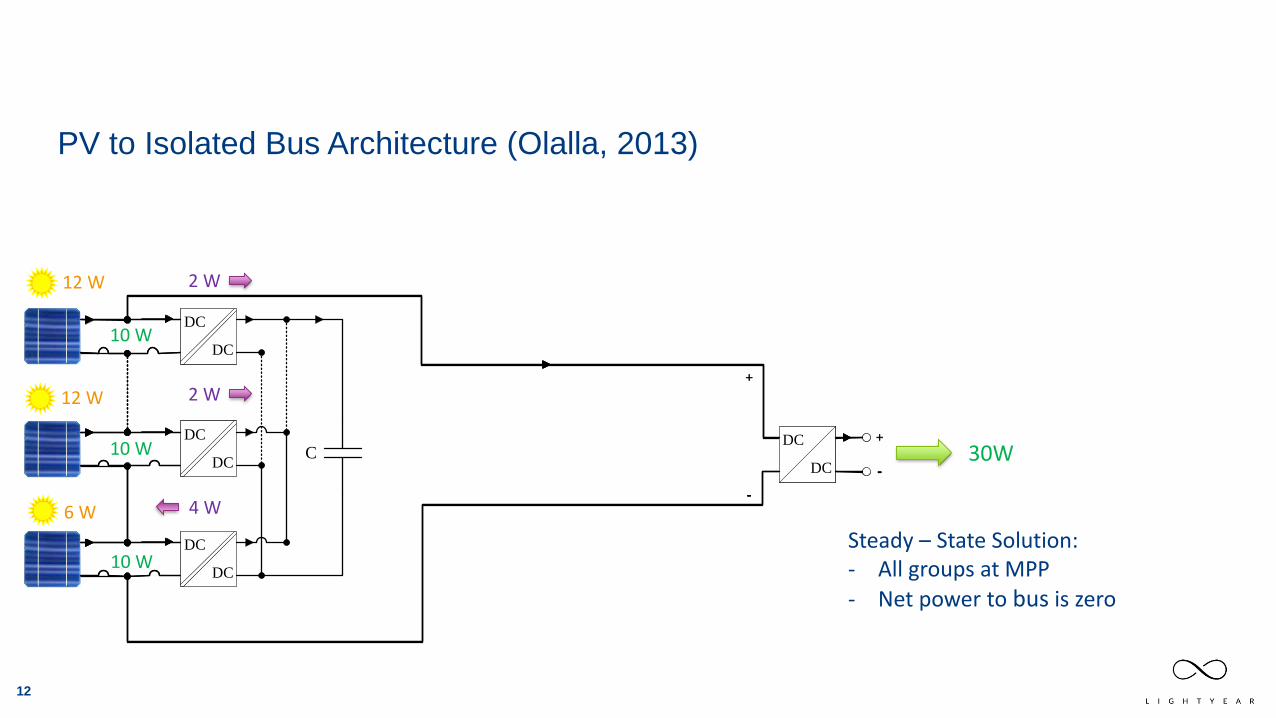
PV to Isolated Bus Architecture (Olalla, 2013)
12
Ipv,n
DC
DC
Istr
+
Vbat
-
Ibat
Ipv,2
Ipv,1
+
Vstr
-
DC
DC
In
DC
DC
I2
DC
DC
I1
Ipv,n
DC
DC
Istr
+
Vbat
-
Ibat
Ipv,2
Ipv,1
+
Vstr
-
Ipv,n
DC
DC
Istr
+
Vbat
-
Ibat
Ipv,2
Ipv,1
+
Vstr
-
DC
DC
In
DC
DC
I2
DC
DC
I1
In'
C
Ic
I2'
I1'
12 W
12 W
6 W
30W
2 W
2 W
4 W
10 W
10 W
10 WSteady – State Solution:- All groups at MPP
- Net power to bus is zero
13
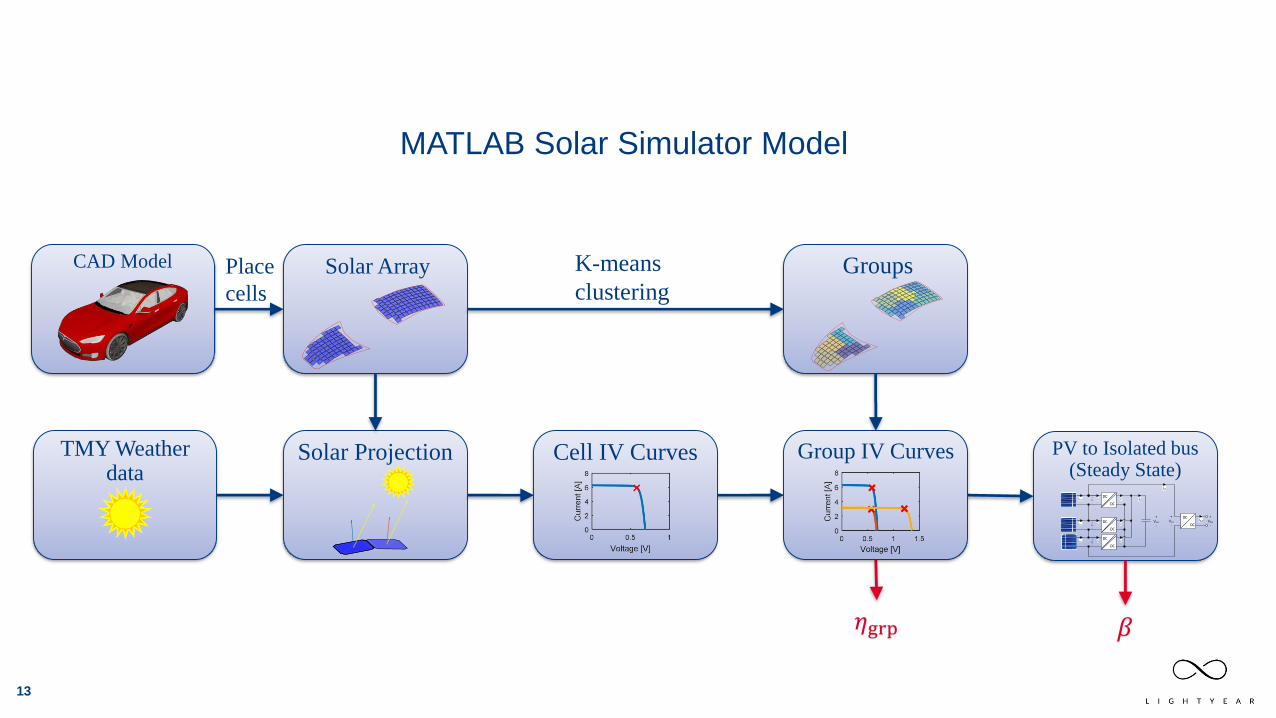
MATLAB Solar Simulator Model
CAD Model Solar Array GroupsPlace
cells
K-means
clustering
TMY Weather data
Solar Projection PV to Isolated bus (Steady State)
DC
DC
+V1
-
I1Ipv,1
DC
DC
+V2
-
I2Ipv,2
DC
DC
+Vsec
-
In'Ipv,n
I2'
I1'
IcIn+Vn
-
DC
DC
+Vstr
-
Istr
+Vbat
-
Ibat
𝜂grp 𝛽
Cell IV Curves Group IV Curves
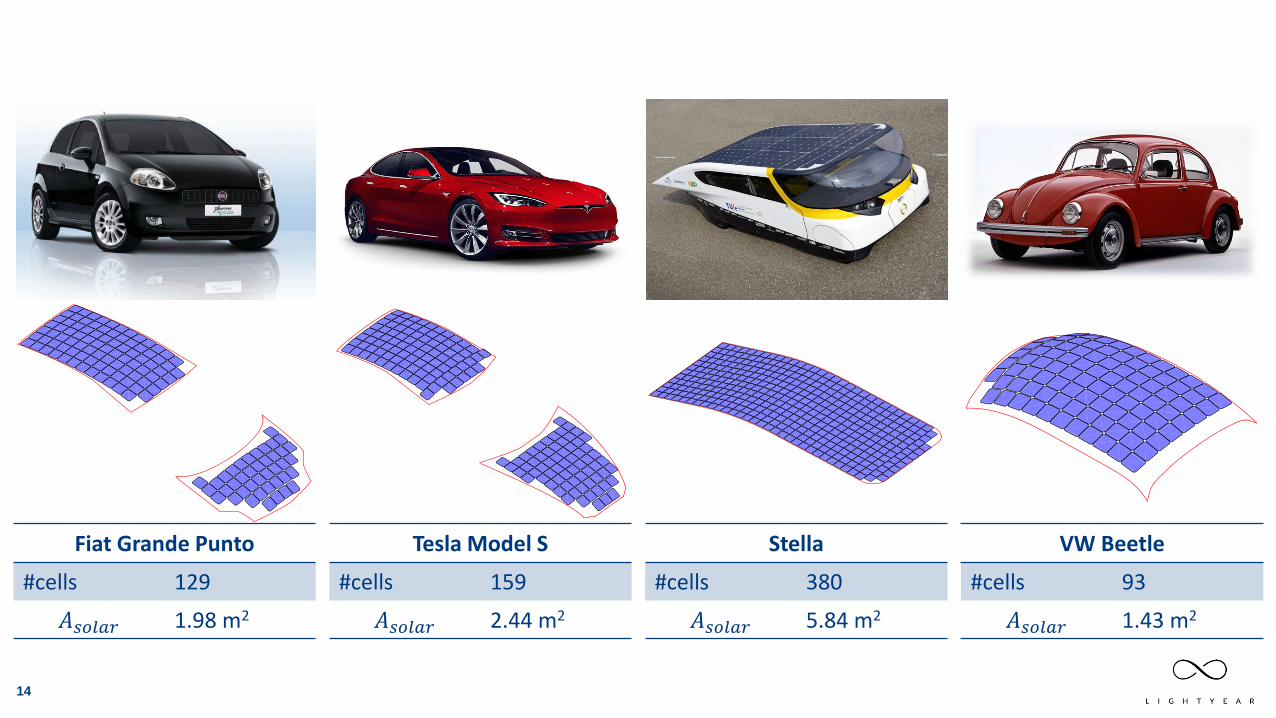
14
Fiat Grande Punto
#cells 129
𝐴𝑠𝑜𝑙𝑎𝑟 1.98 m2
Tesla Model S
#cells 159
𝐴𝑠𝑜𝑙𝑎𝑟 2.44 m2
Stella
#cells 380
𝐴𝑠𝑜𝑙𝑎𝑟 5.84 m2
VW Beetle
#cells 93
𝐴𝑠𝑜𝑙𝑎𝑟 1.43 m2
15
16
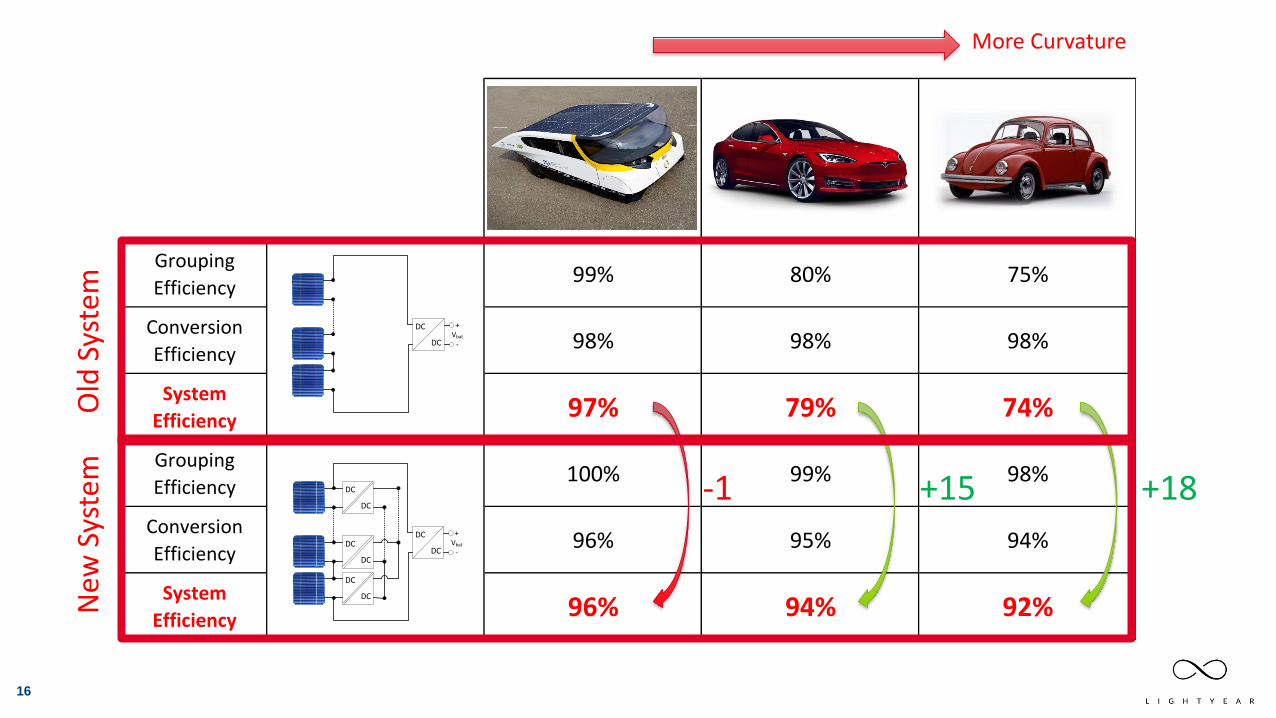
Grouping
Efficiency99% 80% 75%
Conversion
Efficiency98% 98% 98%
System
Efficiency97% 79% 74%
Grouping
Efficiency100% 99% 98%
Conversion
Efficiency96% 95% 94%
System
Efficiency96% 94% 92%
DC
DC
+Vbat
-
DC
DC
DC
DC
DC
DC
DC
DC
+Vbat
-
-1 +15 +18
More Curvature
Old
Sys
tem
New
Sys
tem

A look into the future
2019Lightyear One prototypes
2020First deliveries of Lightyear One
20211000 deliveries of Lightyear One
Start Lightyear Two
Key Takeaways
Detailed modelling is key to understanding the design space and creating optimized solutions
For typically curved cars, the DMPPT system can improve performance by up to 18%-points
The diversity of MATLAB / Simulink allows It to be used as a ‘swiss army knife’ for engineers

Clean mobility for everyoneArjo van der Ham – Chief Technology Officer
Thank you