model-based signature verification with rotation invariant features
TRANSCRIPT

Pattern Recognition 42 (2009) 1458 -- 1466
Contents lists available at ScienceDirect
Pattern Recognition
journal homepage: www.e lsev ier .com/ locate /pr
Model-based signature verificationwith rotation invariant features
Jing Wen, Bin Fang∗, Y.Y. Tang, TaiPing ZhangCollege of Computer Science, Chongqing University, Chongqing 400044, PR China
A R T I C L E I N F O A B S T R A C T
Article history:Received 27 December 2007Received in revised form 27 September 2008Accepted 13 October 2008
Keywords:Signature verificationRotation invariantRing-peripheral featureSample set pickupHMMThreshold selection
Non-linear rotation of signature patterns is one of the major difficulties to solve in off-line signatureverification. This paper presents two models utilizing rotation invariant structure features to tackle theproblem. In principle, the elaborately extracted ring-peripheral features are able to describe internal andexternal structure changes of signatures periodically. In order to evaluate match score quantitatively,discrete fast fourier transform is employed to eliminate phase shift and verification is conducted based ona distance model. In addition, the ring-hidden Markov model (HMM) is constructed to directly evaluatesimilar between test signature and training samples. With respect to the side effect of outlier trainingsamples for stable statistical model and threshold estimation, we propose a selection strategy to improvethe performance of system. Experimental results demonstrated that the proposed methods were effectiveto improve verification accuracy.
© 2008 Elsevier Ltd. All rights reserved.
1. Introduction
Biometrics research has been the focus for scientists and engi-neers in the past decades. Signature verification is an importantform of behavioral biometric identification and becomes an activeresearch field with many applications [1]. In general, automatic sig-nature verification can be categorized into two kinds of on-line ver-ification [2–5] and off-line verification [6–16], respectively. On-linesignature verification system has been achieved high accuracy rateswith dynamic features like pressure, acceleration, stroke order, etc.However, due to the lack of dynamic information, off-line signatureverification is more difficult than on-line signature verification. Usu-ally three kinds of forgery may be considered: random forgery, sim-ple forgery, and skilled forgery [6] (see Fig. 1). It is obvious fromFig. 1 that skilled signatures forgeries are very similar to the genuinesignatures to be distinguished.
With respect to skilled forgeries detection, an extensive overviewof the previouswork is included in a paper by Guo et al. [7] in 2001. Qiand Hunt [8] extracted global shape features based on the projectionof the signature and local grid features. Guo et al. [9] used the localfeatures such as the stroke and sub-stroke to detect skilled forgeriesinstead of global features. Recently, Huang and Yan [10] presented anewmethod for off-line signature verification using a combination ofstatic image pixel features and pseudo-dynamic structural features.Fang et al. [11] extracted the smoothness feature by two approaches
∗ Corresponding author. Tel.: +862365112784; fax: +862365102502.E-mail address: [email protected] (B. Fang).
0031-3203/$ - see front matter © 2008 Elsevier Ltd. All rights reserved.doi:10.1016/j.patcog.2008.10.006
including a crossing method and a fractal dimension method. Fang etal. [12] also proposed to track the positional variations of the strokesof signature and build a statistics of these variations for verificationmodel. Madasu et al. [13] extracted unique angle features in box andemployed fuzzy model for developing a robust recognition system.In Ref. [14], Coetzer et al. used the discrete Radon transform (DRT)and a hidden Markov model (HMM) to detect the skilled forgeries.Ooi et al. [15] improved the verification accuracy through biometricstrengthening based on [14]. Ref. [16] proposed a modified DTWalgorithm which is effective to improve verification accuracy. Upto now, off-line skilled forgery detection is still an open researchproblem needed more efforts to address it.
In this paper, we mainly aim at solving rotation invariant prob-lem for skilled signature. Non-linear rotation of signature patternsinevitably exists after preprocessing and causes non-stable featurestatistics for classification. Ring-peripheral features (RPF) based ontransformation-ring-projection (TRP) [17] are extracted. The elabo-rately designed features are able to describe internal and externalstructure of signature pattern. In principle, they are periodical androtation invariant. Different start points to generate the feature vec-tor will yield various phase shifts. In order to facilitate the matchprocess, two different approaches were applied to eliminate phaseshift. One method employs fast fourier transform (FFT) making sig-nature features consistent. The other approach is to construct a ring-HMM, directly evaluate match score for verification.
The rest of the paper is organized as follows. Section 2 mainlydiscusses preprocessing, the new designed features, and implemen-tation to tackle rotation variant problem. Section 3 is devoted totwo types of signature verification models including distance-based

J. Wen et al. / Pattern Recognition 42 (2009) 1458 -- 1466 1459
Fig. 1. Example of (a) genuine signatures, (b) random forgeries, (c) simple forgeries, and (d) skilled forgeries.
model and HMM. To fine tune-up the system performance, a trainingsample quality evaluation and selection method is proposed in Sec-tion 4. Some experiment results on the self-made signature databaseand a subcorpus of MCYT are reported in Section 5. Finally, conclu-sions and future work are presented in Section 6.
2. RPF extraction
2.1. Preprocessing
Preprocessing steps have to be applied before the signature im-ages ready for feature extraction. Signature patterns are digitized bya scanner with a resolution of 300dots/in. Then, mathematical mor-phology method is used to remove the noise of small area. Finally,the signature pattern skeletons identified by a thinning algorithm toreduce it to one pixel wide strokes [18]. An example of processedsignature is shown in Fig. 2.
2.2. RPF extraction
It is important to extract appropriate feature sets to represent sig-nature for match evaluation. In the case of detecting skilled signaturewhere forgeries are visually much similar to the genuine signatureson a global scale, local measurement to extract pertinent detailedinformation are needed. Moreover, obtained signatures always showdifferent orientations of various rotation angles. This motivates usto design the following RPF to deal with the rotation problem. Theimportant property of RPF features is that they are able to detectinterpersonal change by ring projection, and they are periodical tomake the resulting feature vectors for the same writer identical withonly phase shift in fact.
We suppose that each of the two-dimensional signature patternsis denoted by f (x, y). Thus, we may find the center of gravity g(x, y)from the signature image at first, which is given by⎧⎪⎨⎪⎩x = m10
m00
y = m01
m00
(1)
where mpq = ∑Mx=1
∑Ny=1x
pyqf (x, y). That is also to say, the center ofgravity is denoted by first moment of the pattern.
Next, an enclosing circle whose center locates at gravity pointwith radius R is determined. R is defined as follows:
R = maxi
√(xi − x)2 + (yi − y)2 (2)
where i ∈ [1,M × N]. Herein, (xi, yi) stands for a black pixel in thesignature image. Thus the signature can be completed enclosed inthe circle.
Further, we convert Cartesian coordinate into the polar coordi-nate based on following relations:{x = r cos�y = r sin�
(3)
Fig. 2. Sample of original and after-preprocessing signature.
Hence, TRP based on certain angle � of f (x, y) can be expressedas follows:
f (�) =M∑r=0
f (r cos�, r sin�) (4)
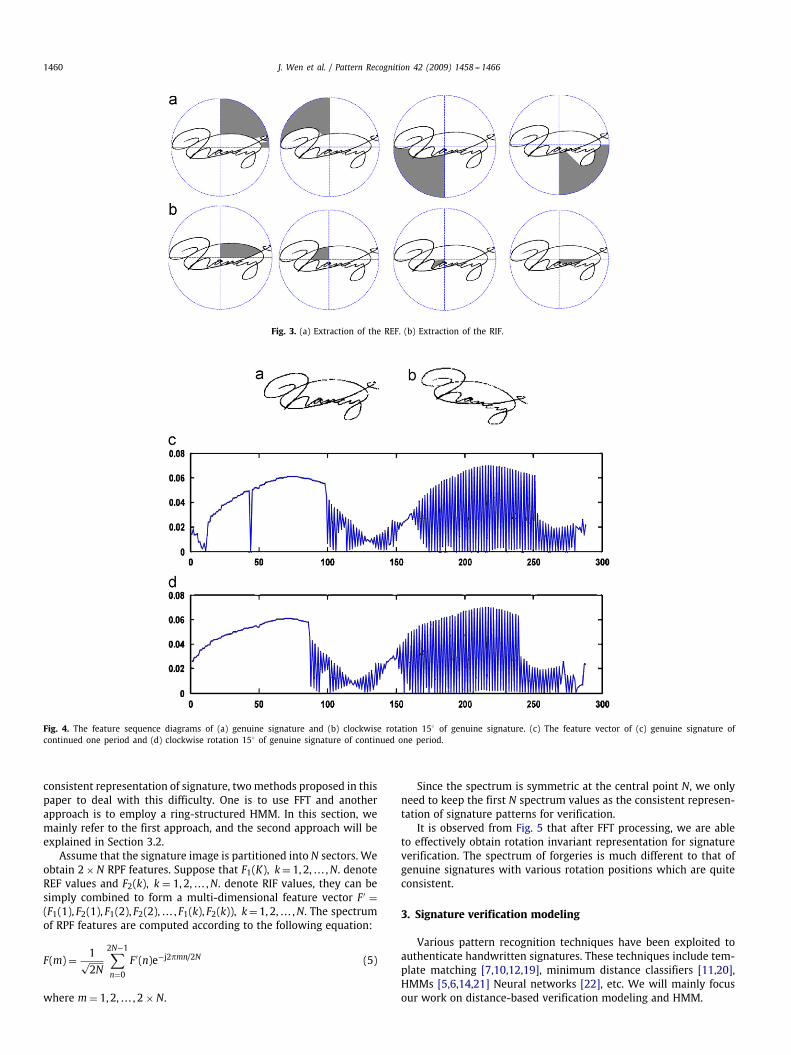
where ��[0, 2�]. Assume that we divide the signature image in thecircle into N equal sectors, along the enclosing circle of the signature,at equally spaced intervals and in a revolving fashion. The RPF cal-culates the numbers of white pixel in each signature partition. Thereare two types of such extraction: ring-external-feature (REF) andring-internal-feature (RIF). REF is the ring projection area betweenthe virtual circle frame and white-to-black pixel jump toward thecenter of circle, it is well suitable for describing the whole signatureexternal shape. The RIF calculates the ring projection area betweenthe first white pixel and the first white-to-black pixel jump begin-ning from the center of circle, consequently, it may represent moreinternal detail structure features such as stroke relative positions,etc. The REF and RIF are illustrated in Fig. 3.
The area of each shaded sector is view as one feature value.In this example, equally spaced angle is 90◦. Therefore, altogether8-dimensional features are obtained.
From the theoretic point of view, if the sector segment parame-ter is small enough, i.e., we have fine resolution for ring projectioncomputation, and the extracted RPF features remain unchanged withonly phase shift for the different signatures with various orientations(Figs. 4c and d). Hence, they are useful to tackle the rotation problemif we can further eliminate phase shift. In practice, due to the inher-ent intra-class variation of the same person signature, RPF featureswill not be identical for different rotations. Nevertheless, they stillprovide sufficient discriminated information for the purpose of veri-fication. Because values of the REF and RIF depend on the circle area,the extracted feature values are normalized by dividing each featurevalue to the area of the circle to make them also scale invariant.
2.3. Rotation invariant implementation
The extracted RPF features are not used directly to distinguishauthentic signatures and forgeries because there exist phase shiftof RPF feature vectors. In order to eliminate phase shift and obtain
1460 J. Wen et al. / Pattern Recognition 42 (2009) 1458 -- 1466
Fig. 3. (a) Extraction of the REF. (b) Extraction of the RIF.
Fig. 4. The feature sequence diagrams of (a) genuine signature and (b) clockwise rotation 15◦ of genuine signature. (c) The feature vector of (c) genuine signature ofcontinued one period and (d) clockwise rotation 15◦ of genuine signature of continued one period.
consistent representation of signature, twomethods proposed in thispaper to deal with this difficulty. One is to use FFT and anotherapproach is to employ a ring-structured HMM. In this section, wemainly refer to the first approach, and the second approach will beexplained in Section 3.2.
Assume that the signature image is partitioned into N sectors. Weobtain 2×N RPF features. Suppose that F1(K), k= 1, 2, . . . ,N. denoteREF values and F2(k), k = 1, 2, . . . ,N. denote RIF values, they can besimply combined to form a multi-dimensional feature vector F ′ =(F1(1), F2(1), F1(2), F2(2), . . . , F1(k), F2(k)), k= 1, 2, . . . ,N. The spectrumof RPF features are computed according to the following equation:
F(m) = 1√2N
2N−1∑n=0
F′(n)e−j2�mn/2N (5)
where m = 1, 2, . . . , 2 × N.
Since the spectrum is symmetric at the central point N, we onlyneed to keep the first N spectrum values as the consistent represen-tation of signature patterns for verification.
It is observed from Fig. 5 that after FFT processing, we are ableto effectively obtain rotation invariant representation for signatureverification. The spectrum of forgeries is much different to that ofgenuine signatures with various rotation positions which are quiteconsistent.
3. Signature verification modeling
Various pattern recognition techniques have been exploited toauthenticate handwritten signatures. These techniques include tem-plate matching [7,10,12,19], minimum distance classifiers [11,20],HMMs [5,6,14,21] Neural networks [22], etc. We will mainly focusour work on distance-based verification modeling and HMM.

J. Wen et al. / Pattern Recognition 42 (2009) 1458 -- 1466 1461
Fig. 5. The feature frequency spectrum diagrams of (a) genuine signature, (b) clockwise rotation 15◦ of genuine signature, and (c) imitative signature. The feature frequencyspectrum of the feature vector of (d) genuine signature, (e) clockwise rotation 15◦ of genuine signature, and (f) imitative signature.
3.1. Mahalanobis distance-based model
3.1.1. TrainingIf there are K training signatures from one writer, the statistics
of the REF and RIF can be presented by the maximum likelihoodestimates of the mean � and the covariance matrix � as follows:
� = 1K
K∑i=1
Fi
∑= 1K
K∑i=1
(Fi − �)(Fi − �)T (6)
Assume that the signature is divided into N sectors, so the featuresof each signature consist of 2×N elements. Then, by FFT, we obtainthe spectrum vector denoted as X = (x1, x2, . . . , xM)T, where T standsfor transpose and M=N. On an input signature sample with featurevector X, the distance between the set of training signatures of aclass is computed using the Mahananobis distance d given by thefollowing equation:
d =((X − �)T
∑−1(X − �)
)1/2
(7)
Let �j (j=1, 2, . . . ,M) be the jth eigenvalue of � sorted by decreas-ing order, and �j (j=1, 2, . . . ,M) be the eigenvector that correspondsto �j. So Eq. (7) can be rewritten as [23]
d2 =M∑j=1
((X − �)T�j)2
�j(8)
In real-world scenarios, each writer can only submit a small numberof training samples. Compared with dimension of extracting feature
vectors, the training samples are not enough, so the covariance ma-trix cannot be calculated accurately. We replace the value of smalleigenvalues �j (j = K + 1, . . . ,M)) with the mean value of all smalleigenvalues to solve this problem [23]. The defined squared Ma-hananobis distance function can be modified as follows:
d̂2 =K∑j=1
((X − �)t�j)2
�j+
M∑j=K+1
((X − �)t�j)2
(9)
Here, = (1/(M − K))∑M
j=K+1 �j.
3.1.2. VerificationThe verification strategy is simple and straightforward. For a com-
ing test signature declaimed to belong to writer w, its modifiedMahananobis distance dwt to writer w model is computed. If dwt islarger than a threshold T, the test signature is rejected to be a forgery,otherwise, the test signature is accepted as genuine. We will discusshow to determine the important threshold T in details in the nextsection.
3.2. The ring-HMM
HMM have been proved to be a very useful tool for sequencepattern recognition [24]. An HMM may have different structures. Asmentioned before, we extracted RPF features which are periodicalfor the same writer's signatures of various orientations. In order toguarantee rotation invariant of signature verification, we propose theuse of ring-constructed HMM [14] to deal with rotation problem. Anexample of a ring topology HMM is shown in Fig. 6, where the eightcircles represent the states of the model and states are organizedin a ring structure. Each state in the HMM represents one or morefeature vectors that occupy similar positions. This model is similar

1462 J. Wen et al. / Pattern Recognition 42 (2009) 1458 -- 1466
Fig. 6. An example of the ring-constructed HMM of eight states with one state jumpallowed.
to the left-to-right topology in which each state has a transition toitself and the next state, but a transition from the last state to thefirst state is also allowed in ring topology.
A ring-HMM is described quantitatively as following with nota-tions used by Yang et al. [25].
(i) S: set of N individual states
S = S1, S2, . . . , SN (10)
(ii) M: possible number of observed symbols in each state. We de-note the individual symbols as
V = v1,v2, . . . ,vM (11)
(iii) O: observed sequence
O = o1, o2, . . . , ot , ot ∈ v1,v2, . . . ,vM (12)
(iv) A: state transition probability distribution
A = {aij} (13)
where aij = P(qt+1 = Si|qt = Sj), 1� i, j�N.In a ring-constructed HMM, this can be expressed as followingmatrix:
{aij} =
⎛⎜⎜⎜⎜⎜⎝
a11 a12 0 0
0 a22. . . 0
0 0. . . aN−1,N
aN1 0 0 aNN
⎞⎟⎟⎟⎟⎟⎠
(v) �: the initial state probability distribution
� = {�i} (14)
where �i = P(q1 = Si), 1� i�N.(vi) B: an observation probability matrix
B = {bjk} (15)
where bjk=P(Ot=vk|qt=Sj), 1� j�N, 1�k�M are probabilitiesof observing the symbol given in state j.
3.2.1. TrainingTraining signatures for each writer are used to construct an HMM.
The training set for writer w can be written as
Xw = {Xw1 ,X
w2 , . . . ,X
wNw
}, 1�w�W (16)
where Nw is the number of samples in the training set w.Every feature vector is normalized and coded using multi-
labeling method [26] to form a discrete set of codes. Supposethat the quantified sequence of feature vector is Ot , the set of ob-served sequence after quantifying the feature sample of writer w isOw = {Ow
1 ,Ow2 , . . . ,O
wNw
}.We employ the well-known iterative Baum–Welch algorithm to
calculate the HMM parameters [24], the HMM �w model for writerw can be established.
3.2.2. VerificationAfter modeling the ring-HMM, Viterbi algorithm is used to calcu-
late the match score for test samples in the verification stage. Fea-tures Xw
Test = x1, x2, . . . , xT of a given test signature of writer w are ex-tracted as described in the previous section, where xi, i = 1, 2, . . . , Tdenotes the ith feature vector in the sequence. Then the current ob-served sequence is submitted into the ring-HMM of different states.We calculate the reasoning probability P(X|�) with which current se-quence turns up in the state by Viterbi algorithm, and we obtain anoptimal state sequence when the probability reaches the maximum.Finally, the dissimilarity between an observation sequence Xw
Test ofwriter w and an HMM �w model of writer w is calculated as follows:
dwt (XwTest ,�w) = − ln(P(Xw
Test|�w)) (17)
where P(XwTest|�w) quantifies the match score between Xw
Test and �w.A threshold T has also been set up. If dwt is larger than T, the test
signature is accepted, otherwise the test signature is rejected.
4. Optimal samples and threshold decision
4.1. Selection of optimal samples
It is well known that there are inevitable variations in the sig-nature patterns written by the same person, some of them show alot of change due to various bad writing conditions. If such samplesare used for training to establish verification models, statistics of themodels will not be stable and it is difficult to setup the threshold forevaluating match scores. As a result, verification performance tendsto be poor. Fig. 7 shows the mean values of the distances of the gen-uine signatures of four persons. It is obvious that outliers occur forcertain person, for instance, signature sample no. 22 of the fourthperson. In real-world applications, outliers like this exist from timeto time when we collect training samples. Therefore, in order to im-prove the verification system performance, we need to detect such“bad” samples and take them out during enrollment.
The selecting procedure is as follows:
(i) The mean �d of the distance values between the set of trainingsignatures is computed.
(ii) The dissimilarity ratio of all distance values of training signa-tures is defined as
SDi =di − �d
�d, i = 1, 2, . . . ,N (18)

J. Wen et al. / Pattern Recognition 42 (2009) 1458 -- 1466 1463
Fig. 7. Mean values of the matching distance of training signatures for four persons.
where di is the distance of the ith training sample and N is thenumber of training samples.
(iii) For a training sample, if SD is less than a given value, this samplewill be used for model estimation and decide the threshold,otherwise, this sample will be discarded. In our experiments,the given value is 0.3.
4.2. Threshold decision
In the authentication phase, match score in terms of distancebetween the test signature and verification model is calculated. Ifthe distance for similar evaluation is found to be greater than a giventhreshold T, it is considered as a forgery; otherwise it is accepted asauthentic. The threshold T should be set based on statistical modelof training samples to minimize the average error rate on the wholetraining database.
Assume that number of optimal samples to compute model is M,the threshold is evaluated using following equation:
T = �d + �
⎛⎝ 1M
M∑i=1
(di − �d)2
⎞⎠
1/2
(19)
where �d is the mean of distances for the set of training signaturesand � is the deviation parameter, which is set according to experi-ment and minimize the average error rate when training. Analysis ofthe effect of the parameter � on error rates is given in Section 5.1.2.
5. Experiments
Experiments are carried out by using the above described meth-ods on self-made signature database and MCYT corpus, respectively.
5.1. Experiments on self-made database
5.1.1. Self-made signature databaseFor comparing the performance of different signature verification
systems, we constructed a dataset of signatures. Our proposed meth-ods were evaluated on a self-made signature database which consistsof 1320 genuine signatures and 1320 skilled forgeries. These signa-tures collected from 55 volunteers who contributed 24 signatures, 12
Fig. 8. Performance comparison of whether or not performing training samplesselecting for the distance model.
other persons were recruited for providing forgeries, and each per-son imitated two signatures for each of the 55 subjects after practicefor a while. All signatures were written with ball pens or fountainpens and were written into a 1 in × 3 in white rectangular box witha light yellow boundary. The signature images were scanned andbinarized by a desk scanner with a resolution of 300dots/in. Thesebinary images from the database are used for the present study. Be-cause the number of samples from each writer is limited we adoptcross-validation leave-1/3-out method as our training-verifyingscheme.
5.1.2. Results of sample selection and threshold setupAfter sample selection method is used, signature database com-
prises 1272 genuine signatures and 1320 skilled forgeries. It hasshown the importance of using good training samples. Figs. 8 and 9illustrate the fact of impact on FAR (false accepted rate) and FRR

1464 J. Wen et al. / Pattern Recognition 42 (2009) 1458 -- 1466
Fig. 9. ROC graph of whether or not performing training sample selecting for thering-HMM.
Table 1Error rates of the proposed method with different feature dimensions based ondistance model
Feature dimension EER (%)
16 23.524 21.336 19.948 18.472 16.8144 12.1180 15.8240 16.3
(false rejected rate) by using different training sample sets for dis-tance model and HMM, respectively.
In Fig. 8, dotted curves denote FAR and FRR before the selectionof the training samples being performed, in which FAR is denoted asFAR1 curve and FRR is denoted as FRR1 curve. FAR2 and FRR2 wereindicated by solid curves, respectively, after selecting the trainingsamples. In addition, figures show different FAR and FRR results forvarious deviation parameters �. FAR will be larger while FRR smalleras � increases. Threshold should be set at the crossing point of twocurves for the balance between FAR and FRR. It is observed that theposition of the crossing point of two dotted curves is higher thanthat of the crossing point of two solid curves. This is to say, afterthe selection of training samples being carried out, we have betterverification performance as expected.
Fig. 9 shows the receiver operative curves (ROC) graph (FARagainst FRR) for the HMM. The verification results after choosingsample algorithms are represented by solid curve, and the verifica-tion results before choosing samples are denoted by dot curve. It isclear that error rate after sample selection is less than that of nosample selection and the performance of the system is improved.
5.1.3. Verification results of the distance modelThe selection of feature dimensions would directly affect veri-
fication error rates. The more feature dimensions are adopted, themore the details of signature patterns are represented. But, no twosignatures by the same person are identical on a detailed scale, if toomuch feature dimensions are adopted, on the contrary, equal errorrate EER (FAR = FRR) will be larger. In Table 1, EERs using differentfeature dimensions are presented. These include the error rates offeature dimensions from 16, 24, up to 240, which correspond to an-gular intervals of 45◦, 30◦, up to 3◦. That is to say, the signatures weredivided into different sectors of N, N = 8, 12, up to 120. It showedthat the best results were obtained with feature dimension of 144.
Table 2Error rates of the proposed method with different feature dimensions and thenumber of states N based on HMM
Feature dimension N EER (%)
120 60 14.9120 40 18.7120 30 24.6144 72 11.4144 48 15.6144 36 17.3180 90 18.5180 60 17.3180 45 17.6180 36 19.2240 120 13.8240 80 16.9240 60 17.2
Table 3Performance comparison of the proposed methods with the methods given in Refs.[12,16,20]
Method EER (%)
DTW [12] 19.1Modified DTW [16] 17.2ET1 and DT12 [20] 15.6The distance model 12.1HMM 11.4
5.1.4. Verification results of the HMMTable 2 tabulates EER for various dimensions of feature vector
and state numbers N. As can be seen, the best result was obtainedwith the feature dimension of 144, that is, angular interval is 5◦, andthe number of states in HMM was equal to half of the number offeature vectors.
5.1.5. Comparison with other published methods [12,16,20]Since our methods are based on the x/y sequences, it is valuable
to compare our methods with other methods based on the x/y se-quences. Experimental results on various approaches can be foundin Table 3 in terms of EER, and the table presents that the proposedmethods outperformed the previously published x/y sequences basedmethods.
5.2. Experiment on MCYT corpus
5.2.1. MCYT databaseFor further evaluating effectiveness of our method, a subcorpus
of the larger MCYT bimodal database [27] is used in the experiments.Off-line signature subcorpus comprises 2250 signature images, with15 genuine signatures and 15 forgeries per user (contributed by threedifferent user-specific forgers). The 15 genuine signatures were ac-quired at different times (between three and five) of the same acqui-sition session. At each time, between one and five signatures wereacquired consecutively [28]. After sample selection method, signa-ture database comprises 1112 genuine signatures and 1125 skilledforgeries.
We use cross-validation method for training and test. Off-linesignature subcorpus was divided into training and test sets. Trainingset comprises five genuine signatures for per user, and test set consistof the remaining signatures.
5.2.2. Verification results of samples selection method and targetdependent score normalization techniques
The samples selection method described above is also a scorenormalization. The samples selection is done only on genuine sig-natures. Ref. [29] introduced target dependent score normalizationtechniques which are classified into impostor-centric (IC) methods,

J. Wen et al. / Pattern Recognition 42 (2009) 1458 -- 1466 1465
Fig. 10. Verification performance for various score normalization methods based onthe distance model.
Fig. 11. Verification performance for various score normalization methods based onHMM.
target-centric (TC) methods, and target-impostor (TI) methods. TCdoes not use information about impostor score variability, and thebest result is obtained using TC-3. Therefore, we compare ourmethodwith TC-3. In Figs. 10 and 11, the ROC of the samples selectionmethod and TC-3 method using the distance model and HMM aredepicted, respectively.
It is observed from Figs. 10 and 11 that score normalization meth-ods would improve the performance of system, and the samples se-lection method is better than the score normalization method TC-3.
5.2.3. Verification results of different feature dimensionsAs mentioned before, the verification results of our method de-
pend on feature dimensions. Table 4 presents the relations betweenEERs and selected feature dimensions. In this experiment, the num-ber of states in HMM is also equal to the half of the number of fea-ture vectors. Observing from Table 4, for MCYT corpus, when featuredimension is 144, the best result will be obtained.
5.2.4. Comparison with other published methods [12,16,20]To evaluate effectiveness of our methods, three methods
[12,16,20] were implemented using the MCYT subcorpus. Their
Table 4EERs of the proposed method with different feature dimensions based on the distancemodel and HMM
Feature dimension EER(%)
Distance model HMM
90 22.3 22.1120 20.4 19.9144 15.3 15.02180 18.7 18.5240 21.2 20.8
Table 5Performance comparison of the proposed method with other methods using theMCYT subcorpus
Method EER (%)
DTW [12] 23.5Modified DTW [16] 20.9ET1 and DT12 [20] 18.3The distance model 15.3HMM 15.02
EERs were 23.5%, 20.9%, 18.3%, respectively. However, EERs of ourproposed method were 15.3% and 15.02%, respectively. This demon-strated that the proposed methods outperformed the previouslypublished methods. The results are presented in Table 5.
6. Conclusion
Verification scheme for signature of various orientations has beenproposed in this paper to tackle rotation problems. RPF features areelaborately designed to make them not only rotation-invariant butshift- and scale-invariant as well. Two approaches of FFT transfor-mation and ring-HMM, respectively, are presented to establish train-ing models for stable and consistent feature extraction. Experimentsdemonstrated that the proposed methods achieved favorable ver-ification accuracy. This paper also demonstrates that choosing thetraining samples is necessary to build verification model for perfor-mance improvement. Future work focuses on computation complexanalysis, classifier combination, and real-world implementation.
Acknowledgments
This work is supported by the Program for New Century Ex-cellent Talents of Educational Ministry of China (NCET-06-0762),National Natural Science Foundation of China (60873092) and Nat-ural Science Foundations of Chongqing CSTC (CSTC2007BA2003 andCSTC2006BB2003).
References
[1] R. Plamondon, S.N. Srihari, On-line and off-line handwriting recognition: acomprehensive survey, IEEE Trans. Pattern Anal. Mach. Intell. 22 (1) (2000)63–84.
[2] D.Y. Yeung, et al., SVC2004: first international signature verification competition,in: International Conference on Biometric Authentication 2004, Fort Lauderdale,USA, July 15–17, 2004, pp. 16–22.
[3] L. Nanni, Experimental comparison of one-class classifiers for on-line signatureverification, Neurocomputing 69 (7–9) (2006) 869–873.
[4] A. Kholmatov, B. Yanikoglu, Identity authentication using improved onlinesignature verification method, Pattern Recognition Lett. 26 (15) (2005)2400–2408.
[5] J. Fierrez, J. Ortega-Garcia, D. Ramos, J. Gonzalez-Rodriguez, HMM-based on-line signature verification: feature extraction and signature modeling, PatternRecognition Lett. 28 (16) (2007) 2325–2334.
[6] E.J.R. Justino, F. Bortolozzi, R. Sabourin, An off-line signature verification usingHMM for random, simple and skilled forgeries, in: Proceedings of the SixthInternational Conference on Document Analysis and Recognition, Seattle, WA,USA, September 2001, pp. 1031–1034.
[7] J.K. Guo, D.S. Doermann, A. Rosenfeld, Forgery detection by localcorrespondence, Int. J. Pattern Recognition Artif. Intell. 15 (4) (2001) 579–641.

1466 J. Wen et al. / Pattern Recognition 42 (2009) 1458 -- 1466
[8] Y. Qi, B.R. Hunt, Signature verification using global and grid features, PatternRecognition 27 (12) (1994) 1621–1629.
[9] J.K. Guo, D. Doermann, A. Rosenfeld, Off-line skilled forgery detection usingstroke and sub-stroke properties, in: 15th International Conference on PatternRecognition, vol. 2, Barcelona, Spain, 2000, pp. 355–358.
[10] K. Huang, H. Yan, Off-line signature verification using structural featurecorrespondence, Pattern Recognition 35 (11) (2002) 2467–2477.
[11] B. Fang, Y.Y. Tang, C.H. Leung, et al., Offline signature verification by the analysisof cursive strokes, Int. J. Pattern Recognition Artif. Intell. 15 (4) (2001) 659–673.
[12] B. Fang, et al., Off-line signature verification by the tracking of feature andstroke positions, Pattern Recognition 36 (1) (2003) 91–101.
[13] H. Madasu, M.H.M. Yusof, V.K. Madasu, Off-line signature verification andforgery detection using fuzzy modeling, Pattern Recognition 38 (3) (2005)341–356.
[14] J. Coetzer, B.M. Herbst, J.A. du Preez, Offline signature verification using thediscrete radon transform and a hidden Markov model, EURASIP J. Appl. SignalProcess. 2004 (1) (2004) 559–571.
[15] S.-Y. Ooi, A.B.J. Teoh, T.S. Ong, Offline signature verification through biometricstrengthening, in: 2007 IEEE Workshop on Automatic Identification AdvancedTechnologies, June 2007, pp. 226–231.
[16] A. Piyush Shanker, A.N. Rajagopalan, Off-line signature verification using DTW,Pattern Recognition Lett. 28 (2007) 1407–1414.
[17] Y.Y. Tang, H.D. Cheng, C.Y. Suen, Transformation-ring-projection (TRP) algorithmand its VLSI implementation, Int. J. Pattern Recognition Artif. Intell. 5 (1–2)(1991) 25–56.
[18] B. Fang, W.-S. Chen, X. You, et al., Wavelet thinning algorithm based similarityevaluation for offline signature verification, in: Intelligent Computing inSignal Processing and Pattern Recognition, Kunming, China, August 2006,pp. 547–555.
[19] S. Chen, S. Srihari, Y.Y. Tang, et al., A new off-line signature verificationmethod based on graph matching, in: 18th International Conference on PatternRecognition, Hong Kong, August 2006, pp. 869–872.
[20] B. Fang, C.H. Leung, Y.Y. Tang, P.C.K. Kwok, K.W. Tse, Y.K. Wong, Off-linesignature verification with generated training samples, IEE Proc. Vision ImageSignal Process. 149 (2) (2002) 85–90.
[21] A. El-Yacoubi, E.J.R. Justino, R. Sabourin, F. Bortolozzi, Off-line signatureverification using HMMS and cross-validation, in: IEEE International Workshopon Neural Networks for Signal Processing, Sydney, Australia, December 2000,pp. 859–868.
[22] H. Baltzakis, N. Papamarkos, A new signature verification technique based ona two-stage neural network classifier I, Eng. Appl. Artif. Intell. 14 (1) (2001)95–103.
[23] F. Sun, S. Omachi, N. Kato, H. Aso, S. Kono, T. Takagi, Two-stage computationalcost reduction algorithm based on Mahalanobis distance approximations, in:Proceedings of the 15th International Conference on Pattern Recognition,Barcelona, December 2000, pp. 696–699.
[24] L.R. Rabiner, A tutorial on hidden Markov models and selected applications inspeech recognition, Proc. IEEE 77 (2) (1989) 257–286.
[25] L. Yang, B.K. Widjaja, R. Prasad, Application of hidden Markov model forsignature verification, Pattern Recognition 28 (2) (1995) 161–170.
[26] S. David, M.A. Ferrer, C.M. Travieso, J.B. Alonso, gpdsHMM: a hidden Markovmodel toolbox in the Matlab environment, Complex Systems Intelligence andModern Technological, 2004 〈http://www.gpds.ulpgc.es〉.
[27] J. Ortega-Garcia, J. Fierrez-Aguilar, D. Simon, et al., MCYT baseline corpus: abimodal biometric database, IEE Proc. Vision Image Sensor Process. 150 (6)(2003) 395–401.
[28] J. Fierrez-Aguilar, N. Alonso-Hermira, G. Moreno-Marquez, J. Ortega-Garcia,An off-line signature verification system based on fusion of local and globalinformation, in: Workshop on Biometric Authentication, Lecture Notes inComputer Science, vol. 3087, Springer, Berlin, May 2004, pp. 295–306.
[29] J. Fierrez-Aguilar, J. Ortega-Garcia, J. Gonzalez-Rodriguez, Target dependentscore normalization techniques and their application to signature verification,IEEE Trans. Syst. Man Cybern. Part C 35 (3) (2005) 418–425.
About the Author—JING WEN received the B.Sc degree in Computer Science from China West Normal University, Nanchong, China in 2000, the M.Sc degree in ComputerScience from Southwest Petroleum University, Nanchong, China in 2003. She is currently working toward the Ph.D degree at the College of Computer of Chongqing University.Her research interests include pattern recognition, biometrics, etc.
About the Author—BIN FANG received the B.E. degree in Electrical Engineering from Xi'an Jiaotong University, Xi'an, China, the M.Sc. degree in Electrical Engineering fromSichuan University, Chengdu, China, and the Ph.D. degree in Electrical Engineering from the University of Hong Kong, Hong Kong, China.He is currently a Professor in the Department of Computer Science at the Chongqing University. His research interests include computer vision, pattern recognition, medicalimage processing, biometrics applications, and document analysis.
About the Author—YUANYAN TANG received the B.S. degree in Electrical and Computer Engineering from Chongqing University, Chongqing, China, the M.E. degree in ElectricalEngineering from the Graduate School of Post and Telecommunications, Beijing, China, and the Ph.D. degree in Computer Science from Concordia University, Montreal, Canada.He is presently a Professor in the Department of Computer Science at Chongqing University and a Chair Professor in the Department of Computer Science at Hong KongBaptist University and Adjunct Professor in Computer Science at Concordia University. He is an Honorary Lecturer at the University of Hong Kong and an Advisory Professorat many institutes in China. His current interests include wavelet theory and applications, pattern recognition, image processing, document processing, artificial intelligence,parallel processing, Chinese computing, and VLSI architecture. He has published more than 250 technical papers and is the author/co-author of 21 books/book chapters onsubjects ranging from electrical engineering to computer science.He has serviced as General Chair, Program Chair, and Committee Member for many international conferences. Professor Tang will be the General Chair of the 19th InternationalConference on Pattern Recognition (ICPR'06). He is the Founder and Editor-in-Chief of International Journal on Wavelets, Multiresolution, and Information Processing (IJWMIP)and Associate Editors of several international journals related to Pattern Recognition and Artificial Intelligence. Professor Y.Y. Tang is an IAPR Fellow and an IEEE Fellow.
About the Author—TAIPING ZHANG received his B.Sc. and M.Sc. degrees in Computational Mathematics, from Chongqing University in 1999 and 2001, respectively. Since2005, he is a doctoral student in the Department of Computer Science at the Chongqing University. His research interests include pattern recognition, image processing,machine learning, and computational mathematics.