modeling and predictive control of high buildings with
TRANSCRIPT

Modeling And Predictive Control Of High Performance Buildings
With Distributed Energy Generation And Thermal Storage
Siwei Li, Jaewan Joe, Panagiota KaravaLyles School of Civil Engineering (ArchE Group)
Purdue University
IntroductionObjectivesOverview
Integrated modellingSolar SystemBuilding Model
System Identification Gray‐BoxSubspace Algorithm (Black‐Box)
Results and AnalysisMPC SimulationEnergy Saving Potential
Conclusions2
OUTLINE

3
OUTLINE
IntroductionObjectivesOverview
Integrated modellingSolar SystemBuilding Model
System Identification Gray‐BoxSubspace Algorithm (Black‐Box)
Results and AnalysisMPC SimulationEnergy Saving Potential
Conclusions

Objectives
4
Develop models that capture the relevant system dynamics and are computationally efficient for subsequent use within model‐predictive control (MPC) algorithms.
Investigate the energy saving potential of the integrated system and the predictive controller in comparison with baseline operation strategies.

5
OverviewGrid
Building
Solar irradiance
Utility price
Electricity energy flows Thermal flow Environmental disturbances
Heat pump
Ventilation
Heating load
Radiant floor heating
TBIPV/TTBIPV/T
Ttank
qHP
Thermal storage
HVAC
BIPV/T
Occupancy Weather

6
Grid
Solar irradiance
Utility price
Electricity energy flows Thermal flow Environmental disturbances
Radiant floor heating
TBIPV/T
Ttank
qHP
Thermal storage
Occupancy Weather
Overview
Heat pump
Ventilation
Heating loadBIPV/T

7
Approach
CFD simulation
Experiments
Energy simulation –thermal network
Parametric study
Airflow and thermal field analysis
Nu correlations
Integrated energy model
Test-bed:Living Lab
Building systems integration & Model-predictive Control
ValidateValidate
Input
Coupled with TRNSYS
Assumptions
Weather data
Weather forecastuncertainty
Overview
8
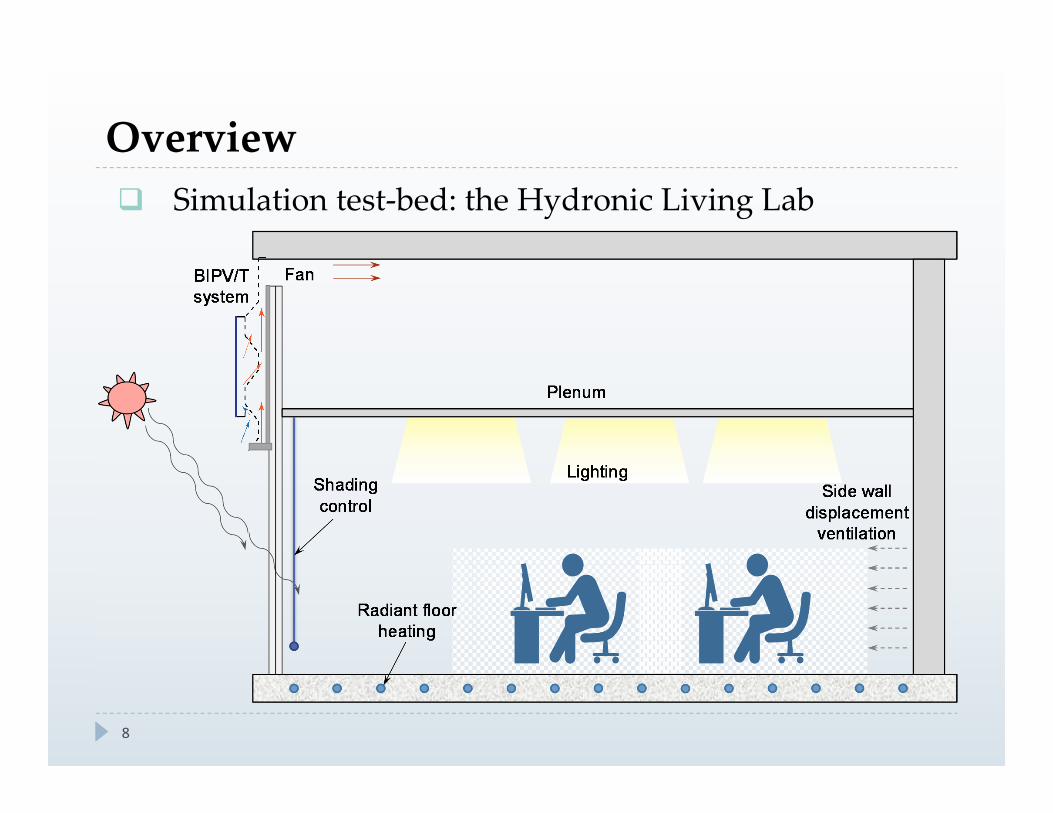
Simulation test‐bed: the Hydronic Living Lab
Overview

9
OUTLINE
IntroductionObjectivesOverview
Integrated modellingSolar SystemBuilding Model
System Identification Gray‐BoxSubspace Algorithm (Black‐Box)
Results and AnalysisMPC SimulationEnergy Saving Potential
Conclusions

10
The corrugated transpired solar collector (without (left) and with (right) PV panels)
fan
cold air
solar radiation
Adiabatic w
all
Corrugated UTC
fan
cold air
solar radiation
UTC
PV module
Adiabatic w
all
Solar System

Building Model
11
Simulation test‐bed: the Hydronic Living Lab
User‐defined component

Building Model
12
Room
Temperature
18 – 26 °C, 8:00 am – 10:00 am
21 – 26 °C, 10:00 am – 18:00 pm
>15 °C, 18:00 pm – 8:00 am
Floor
Temperature19 – 29 °C (ASHRAE Standard 55)
Blind controlON, when the incident solar radiation on the window exceeds 180 W/m2
OFF, when the incident solar radiation on the window drops below 160 W/m2
BIPV/T
design
Total area: 65 m2
PV area: 58.5 m2, around 6.32 kWp
Air flow rate: 5,600 m3/hr, corresponding suction velocity: 0.024 m/s

13
OUTLINE
IntroductionObjectivesOverview
Integrated modellingSolar SystemBuilding Model
System Identification Gray‐BoxSubspace Algorithm (Black‐Box)
Results and AnalysisMPC SimulationEnergy Saving Potential
Conclusions

Gray‐Box
14
State Space 4th order Linear Time‐invariant Discrete
x: state vector (= y)u: input vectory: output vectorA, B, C, D, K: unknowns need to be identified
Ttank
Ctank
ta
Ta2 +-
Uft
qhpCfloorCroom
Urf
Tfloor
TroomUre
qSG2
Cenve
Tenve
Ta+-
Uea
qSG
qSG3
Uef
Ura
Ta3+ -Ufa
U
Identification1

15
10 1010 1010 1010 1010 1010 1010 1010 10
10 1010 1010 1010 10
Gray‐Box
Cost Function:
Subject to:
Optimization algorithm: GA
Identification
Training data set: 49 days (Jan 3rd – Feb 24th)
Calibration data set: 7 days (Feb 25th‐Mar 3rd)

16
Tenve Troom Tfloor Ttank
Training Data‐RMSE (°C) 0.48 0.62 0.84 0.39
Calibration Data‐RMSE (°C) 0.59 0.61 0.98 0.55
Gray‐BoxResults
15
25
35
45
55
2/25
2/26
2/27
2/28
2/29
3/1
3/2
Temperature [degC]
Troom‐Reduced‐order SS model Troom‐TRNSYS modelTtank‐Reduced‐order SS model Ttank‐TRNSYS model

17
Subspace State‐Space System Identification (4SID)
4SIDqSG
TenveTroomTfloorTwrTtank
qSG2
qSG3
qhp
Ta
Ta2
Orders: 20 Inputs: 6; Outputs: 5; Training data set: 49 days
(Jan 3rd – Feb 24th) Calibration data set: 7 days
(Feb 25th‐Mar 3rd)
x: state vectoru: input vectory: output vectorA, B, C, D, K: unknowns need to be identified
1
zero
18
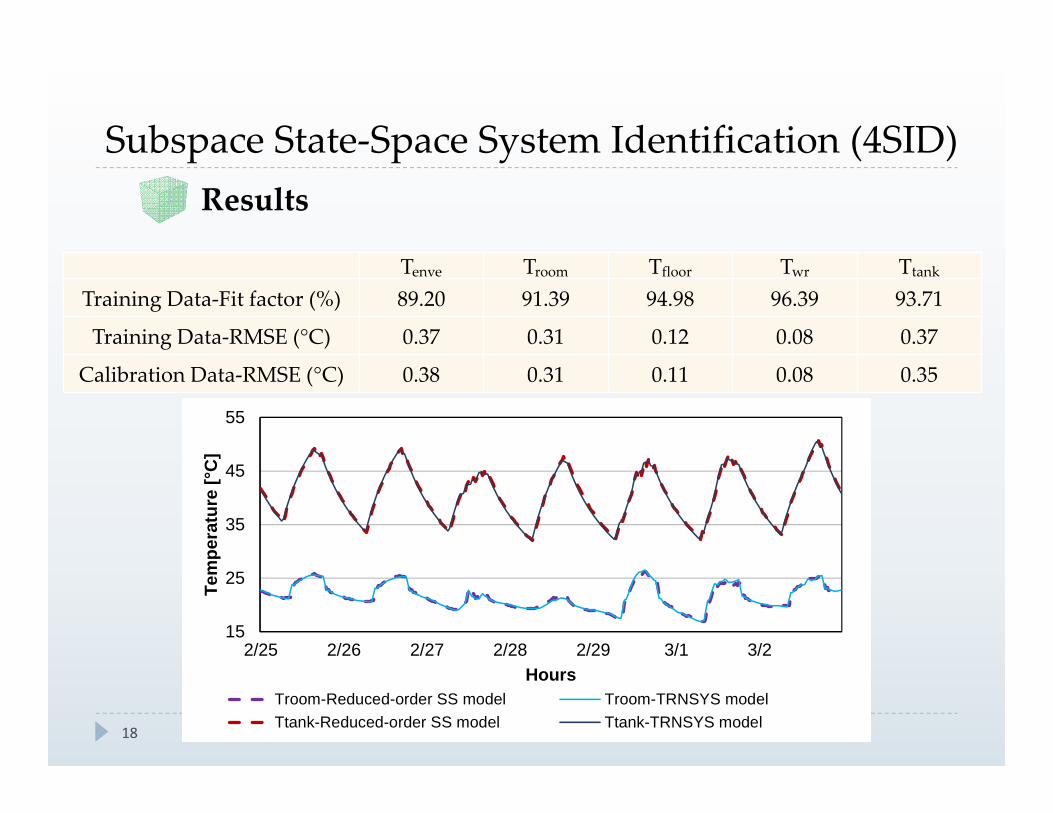
Tenve Troom Tfloor Twr Ttank
Training Data‐Fit factor (%) 89.20 91.39 94.98 96.39 93.71
Training Data‐RMSE (°C) 0.37 0.31 0.12 0.08 0.37
Calibration Data‐RMSE (°C) 0.38 0.31 0.11 0.08 0.35
Subspace State‐Space System Identification (4SID)Results
15
25
35
45
55
2/25 2/26 2/27 2/28 2/29 3/1 3/2
Tem
pera
ture
[°C
]
HoursTroom-Reduced-order SS model Troom-TRNSYS modelTtank-Reduced-order SS model Ttank-TRNSYS model

19
OUTLINE
IntroductionObjectivesOverview
Integrated modellingSolar SystemBuilding Model
System Identification Gray‐BoxSubspace Algorithm (Black‐Box)
Results and AnalysisMPC SimulationEnergy Saving Potential
Conclusions

20
MPC SimulationRead the TMY3 data as the weather forecast
Input the initial states of the building (5 temperatures)
Propose a heuristic initial guess for the control variable qhp
Substitute the control variable into the simplified model and apply the optimization algorithm to
explore and assess the potential solutions for qhp• Ensure no violations of the environmental
(temperatures) or equipment constraints• Calculate the cost function for different
sequences of the control variable
Select the sequence of the control variable with lowest cost function and output the corresponding set points of the tank
temperature
For online MPC, send the tank set point trajectory to the building automation system over the next 2 hours.
Recalculate the final states for the building and repeat the process every 2 hours.
Model-predictive controller
Flow chart:

21
∑ Cost Function:
MPC Simulation
∈ 0,∈ 25, 55∈ 19, 29
∈18,26 08:00 ~ 10:00) 21,26 10:00 ~ 18:00) 15,26 18:00 ~ 08:00)
Optimization algorithm: Pattern search
Subject to:
( )0 1 2 32
42
5

22
Three consecutive sunny days
Total electrical energy consumption: 84 kWh
Corresponding heating load: 690.3 kWh
Equivalent COP: 8.22
MPC SimulationScenario 1
0
400
800
799 809 819 829 839 849 859 869Inci
dent
Sol
ar
Rad
iatio
n [W
/m2]
0
4000
8000
12000
799 809 819 829 839 849 859 869H
eatin
g P
ower
[W]
0
2000
4000
799 809 819 829 839 849 859 869
Ele
ctric
al
Pow
er [W
]
-15-55
15253545
799 809 819 829 839 849 859 869Tem
pera
ture
[°C
]
Hours
Ttank Troom Ta

23
Two sunny days and one cloudy day
Total electrical energy consumption: 116 kWh(38% more than scenario1)
Corresponding heating load: 491.3 kWh
Equivalent COP: 4.24
MPC SimulationScenario 2
0
400
800
967 977 987 997 1007 1017 1027 1037Inci
dent
Sol
ar
Rad
iatio
n [W
/m2]
0
5000
10000
15000
965 975 985 995 1005 1015 1025 1035H
eatin
g Po
wer
[W]
0
2000
4000
965 975 985 995 1005 1015 1025 1035
Ele
ctric
al
Pow
er [W
]
-20-10
01020304050
965 975 985 995 1005 1015 1025 1035
Tem
pera
ture
[°C
]
Hours
Ttank Troom Ta

Energy Saving Potential
24
Two optimal trajectories for scenario one Total electrical energy consumption: 116 kWh vs. 84 kWh (34.5% more for red line)
15
20
25
30
799 809 819 829 839 849 859 869
Roo
m
Tem
pera
ture
[°
C]
2530354045
799 809 819 829 839 849 859 869
Tank
Te
mpe
ratu
re
[°C
]
0
4,000
8,000
12,000
799 809 819 829 839 849 859 869
Ele
ctric
al
Pow
er [W
]
Hours

25
Building heating load: 3896 kWh (February)
10.8 %
33.9 %
11.7 %17.4 %
45.4 %
Energy Saving Potential ‐One month Simulation

Conclusions
26
The developed low‐order models capture the control‐relevant system dynamics Gray‐box model: RMSE of 0.61°C and 0.55 °C for the zone and
tank temperature Black‐box model: RMSE of 0.31°C and 0.35 °C for the zone and
tank temperature
Model‐predictive control is an efficient solution for the proposed solar system with hydronic floor and thermal storage Significant energy savings can be achieved (up to 34.5% based on
the analysis for scenario 1 and 2) The total energy saving of the proposed system with MPC can be
up to 45.4 % compared to baseline RFH operation.

27
Improve the solution algorithm for the nonlinear optimization problem.
Incorporate the water flow rate as a control variable to have a more precise control of the room temperature.
Investigate the weather forecast uncertainty modeling and propagation over the planning horizon.
Investigate the energy efficiency of the integrated system using other solar collectors.
Future Work

Acknowledgements
28
Purdue Research Foundation. ASHRAE (New Investigator Award).
29
Thank You !
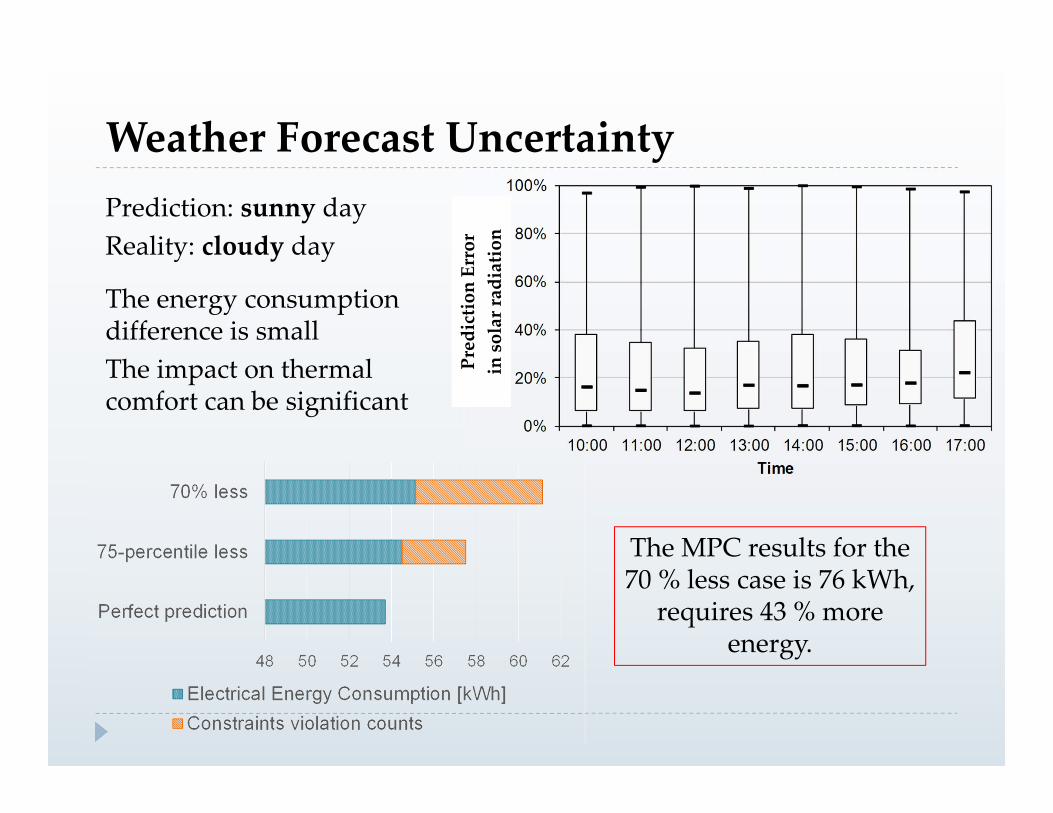
Prediction: sunny dayReality: cloudy day
The energy consumption difference is smallThe impact on thermal comfort can be significant
The MPC results for the 70 % less case is 76 kWh,
requires 43 % more energy.
Weather Forecast Uncertainty
Prediction Error
in solar radiation

Control In TRNSYS
Tankset‐pointtemp min Tout 50,55