modélisation optimale –choix de modèles 06 teratec... · -calcul analytique possible ... -test...
TRANSCRIPT
modélisation optimale– choix de modèles –
Gilles Fleury--------------------------
Département SSEEA2523 « Signaux et Systèmes Electroniques »
SUPÉLEC-------------------------------------------------------------
01.07.2009
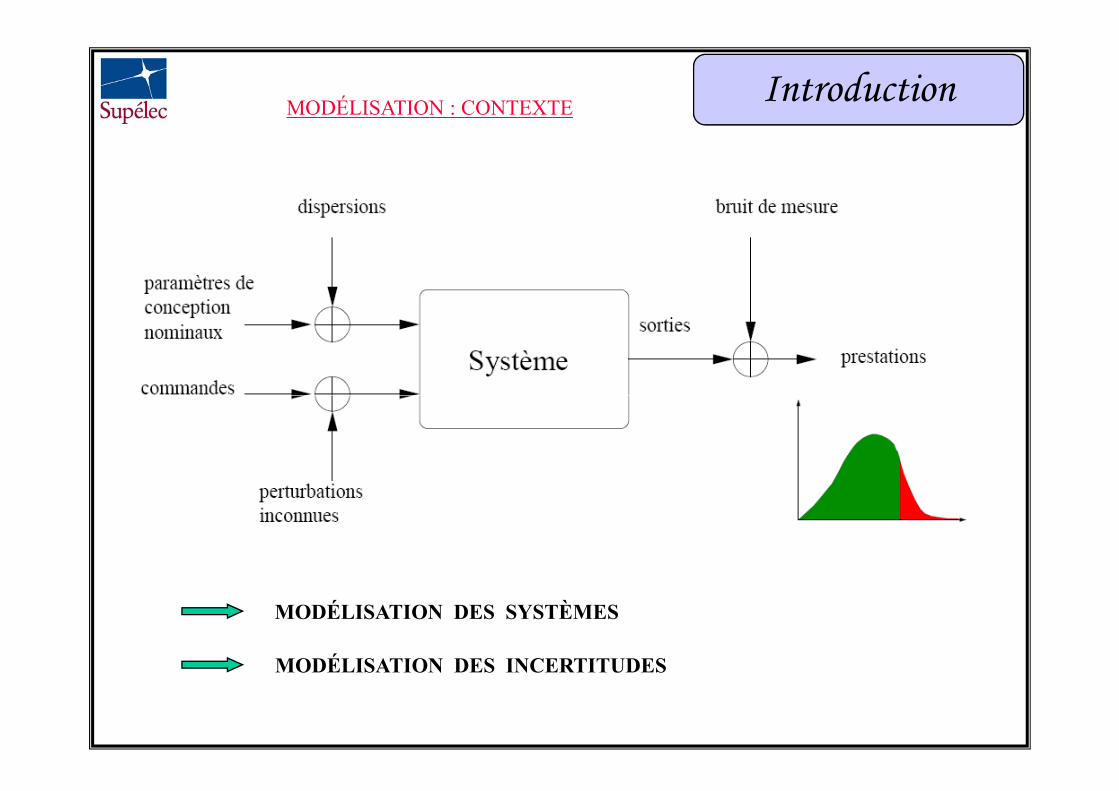
Introduction MODÉLISATION : CONTEXTE
MODÉLISATION DES SYSTÈMES
MODÉLISATION DES INCERTITUDES

Introduction
Population des États-UnisPopulation (100 M
)
EXEMPLE DE MODÉLISATION
Population (100 M
)
Temps (année)
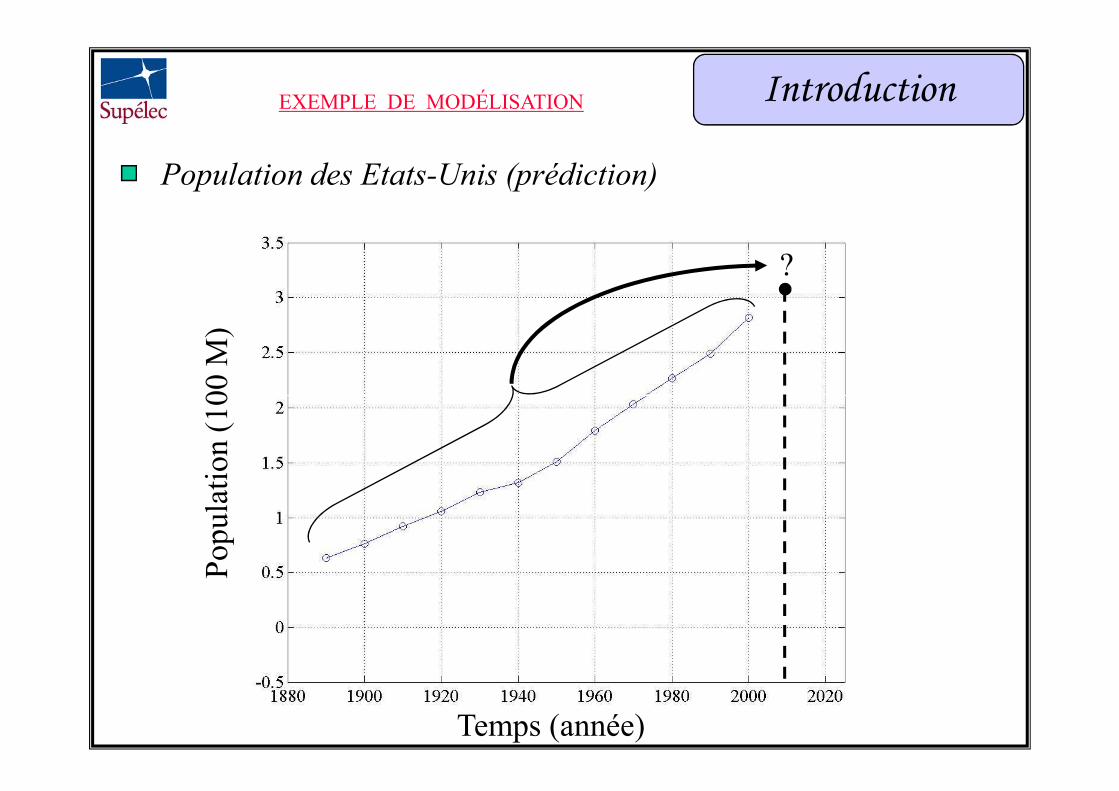
Introduction
Population des Etats-Unis (prédiction)Population (100 M
)
?
EXEMPLE DE MODÉLISATION
Population (100 M
)
Temps (année)
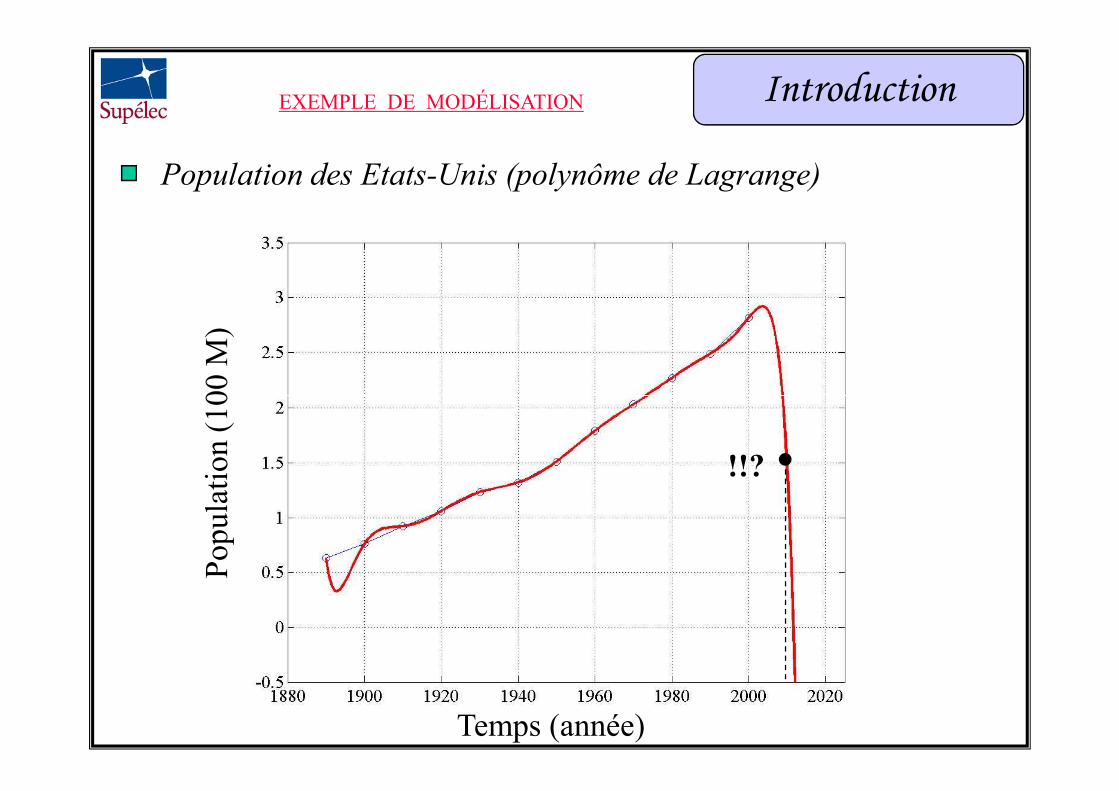
Introduction
Population des Etats-Unis (polynôme de Lagrange)Population (100 M
)
EXEMPLE DE MODÉLISATION
Population (100 M
)
Temps (année)
!!?

Introduction
Population des Etats-Unis (régression polynomiale, ordre 2)Population (100 M
)
EXEMPLE DE MODÉLISATION
Population (100 M
)
Temps (année)

Introduction
Population des Etats-Unis (interpolation ?)
zoom
Population (100 M
)
EXEMPLE DE MODÉLISATION
Population (100 M
)
Temps (année)
Plan
Modélisation des incertitudes- approches paramétriques- approches non paramétriques
Choix d’un modèle de système- choix de la complexité d’un modèle- choix d’un modèle de comportement- choix d’un modèle de comportement- choix de la paramétrisation d’un modèle- vers des méta-modèles
Aides à la prise de décision- Estimation d’évènements rares- Optimisation d’un système complexe
Exemples d’application
Plan
Modélisation des incertitudes- approches paramétriques- approches non paramétriques
Choix d’un modèle de système- choix de la complexité d’un modèle- choix d’un modèle de comportement- choix d’un modèle de comportement- choix de la paramétrisation d’un modèle- vers des méta-modèles
Aides à la prise de décision- Estimation d’évènements rares- Optimisation d’un système complexe
Exemples d’application

Modèle et incertitudes
Température maximale au parc Montsouris (Paris)C)
signal y(t)
Te = 1 jour
EXEMPLE
Temps (jour)
T (°C
)
N = 18263
T = 50 ans
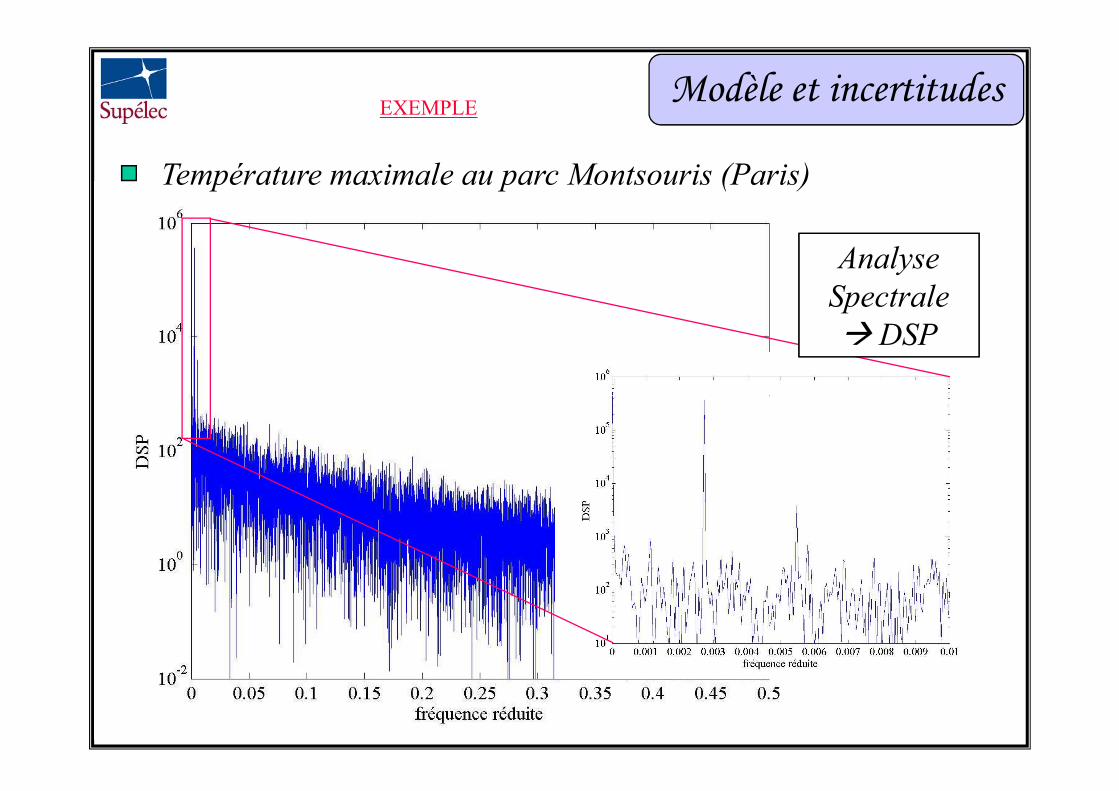
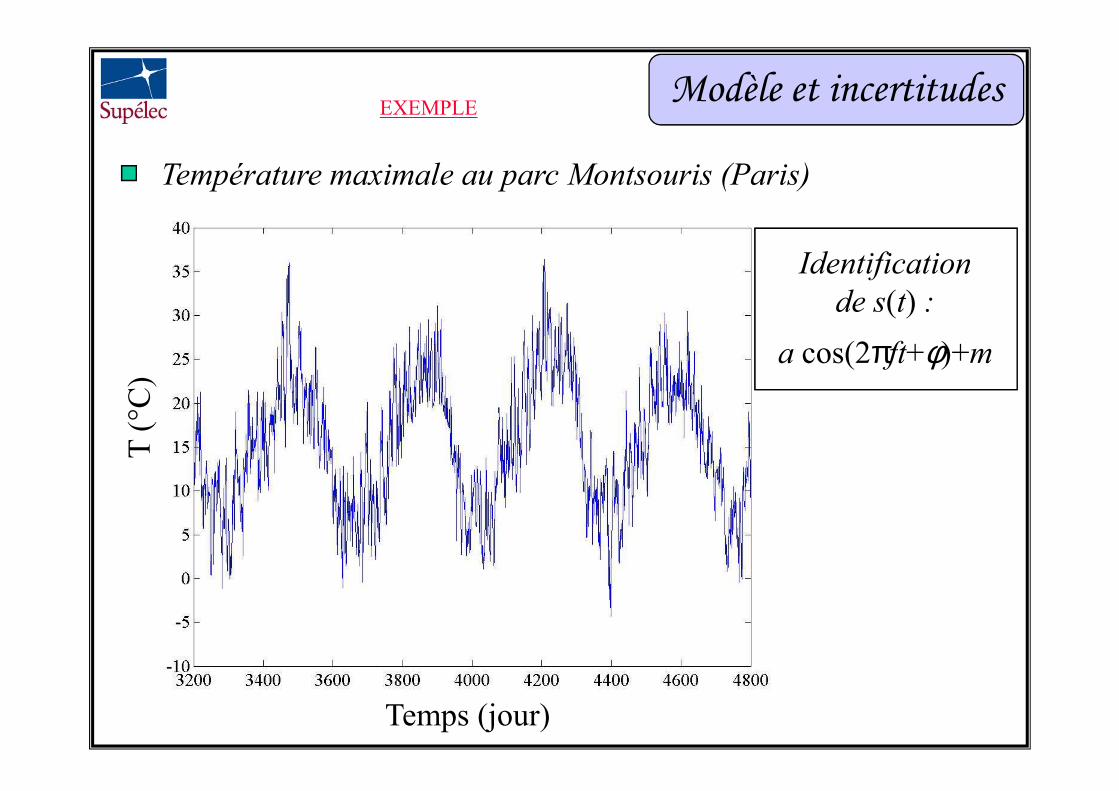
Température maximale au parc Montsouris (Paris)
AnalyseSpectrale� DSP
EXEMPLEModèle et incertitudes
Température maximale au parc Montsouris (Paris)C)
Identificationde s(t) :
a cos(2πft+φ)+m
EXEMPLEModèle et incertitudes
Temps (jour)
T (°C
)

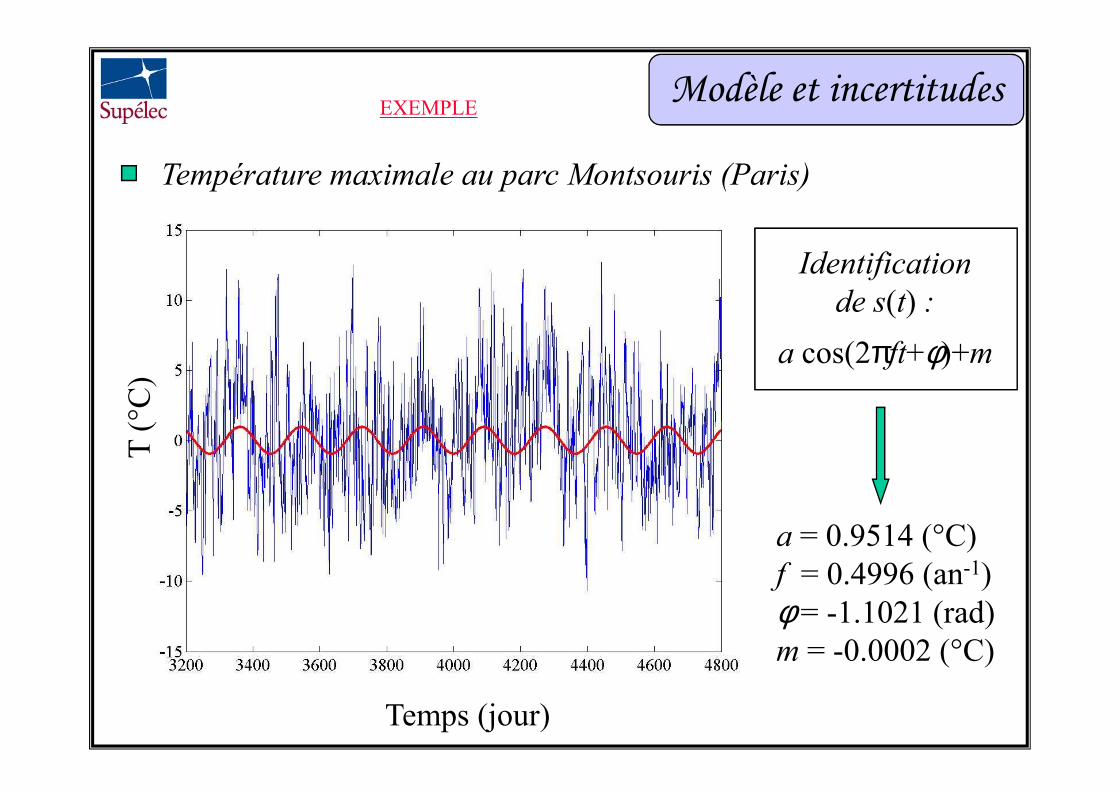
Température maximale au parc Montsouris (Paris)C)
Identificationde s(t) :
a cos(2πft+φ)+m
EXEMPLEModèle et incertitudes
Temps (jour)
T (°C
)
a = 8.9593 (°C)f = 1.0009 (an-1)φ = -1.8361 (rad)m = 15.3545 (°C)

Température maximale au parc Montsouris (Paris)C)
Résidud’identification
y(t) = s(t)+r(t)
EXEMPLEModèle et incertitudes
Temps (jour)
T (°C
)
Caractérisationdu résidu r(t)

Température maximale au parc Montsouris (Paris)
AnalyseSpectrale� DSP
EXEMPLEModèle et incertitudes
Température maximale au parc Montsouris (Paris)C)
Identificationde s(t) :
a cos(2πft+φ)+m
EXEMPLEModèle et incertitudes
Temps (jour)
T (°C
)
a = 0.9514 (°C)f = 0.4996 (an-1)φ = -1.1021 (rad)m = -0.0002 (°C)
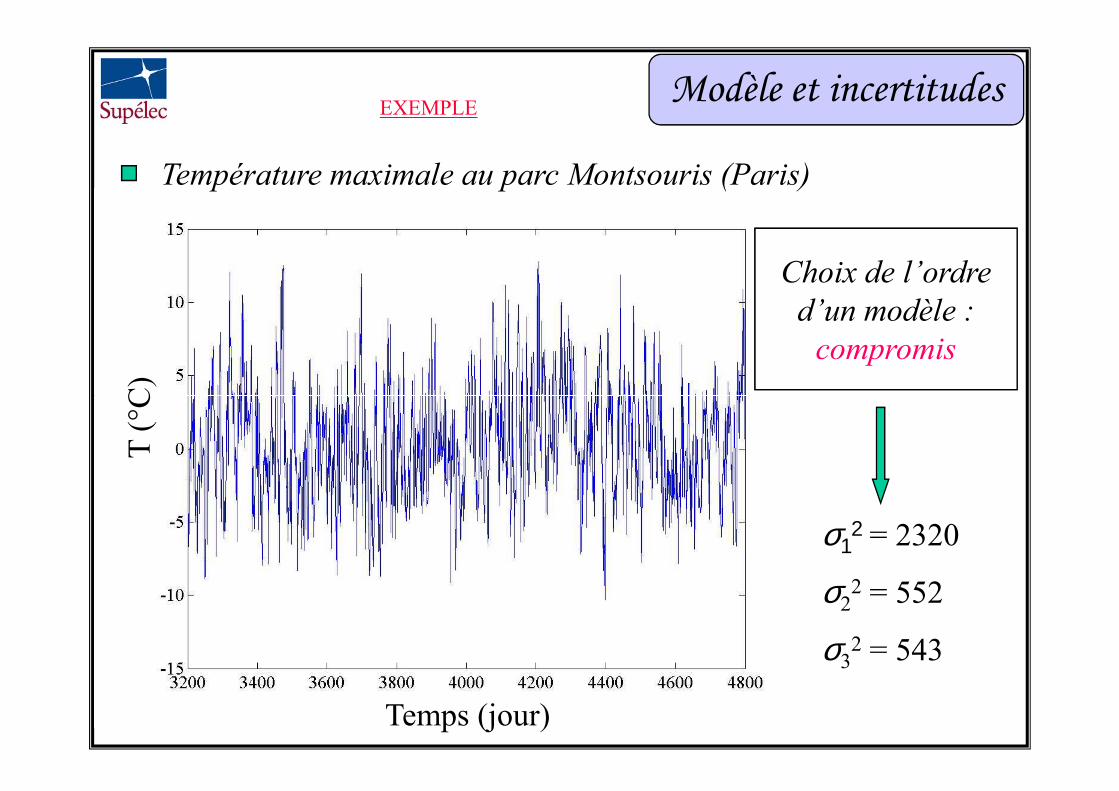
Température maximale au parc Montsouris (Paris)C)
Choix de l’ordred’un modèle :compromis
EXEMPLEModèle et incertitudes
Temps (jour)
T (°C
)
σ12 = 2320
σ22 = 552
σ32 = 543

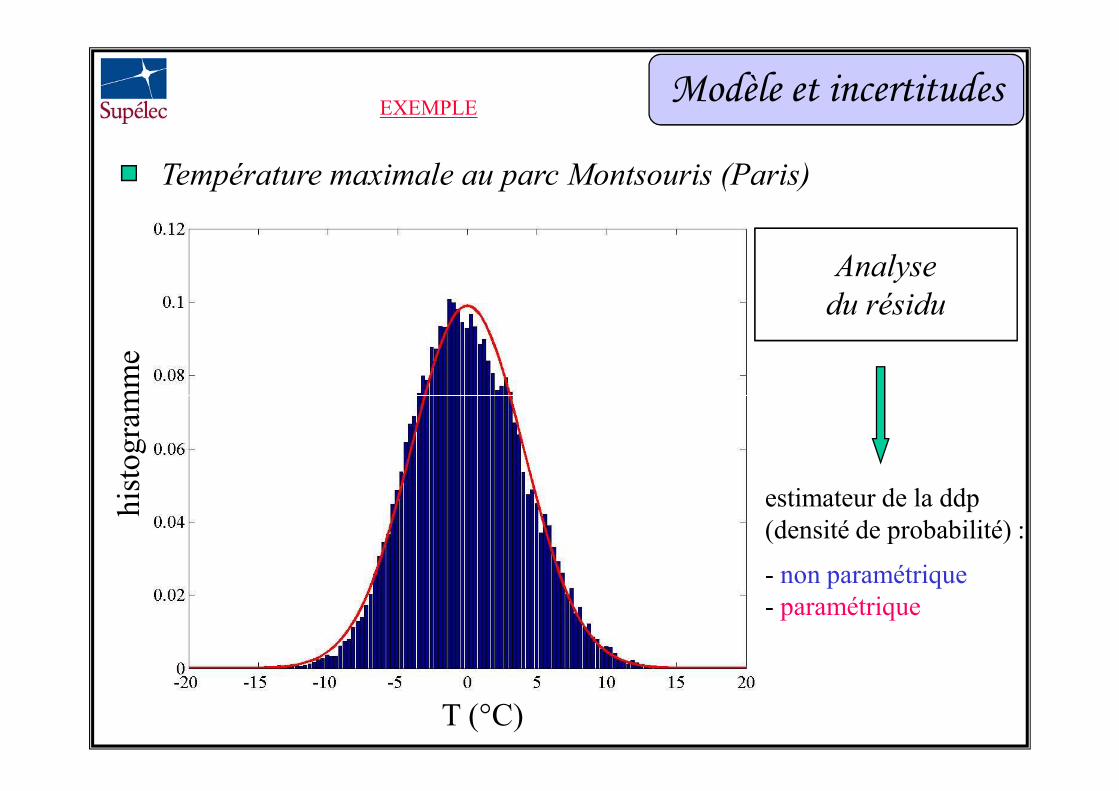
Température maximale au parc Montsouris (Paris)
histogramme
Analysedu résidu
EXEMPLEModèle et incertitudes
T (°C)
histogramme
estimateur de la ddp(densité de probabilité) :
- non paramétrique
Température maximale au parc Montsouris (Paris)
histogramme
Analysedu résidu
EXEMPLEModèle et incertitudes
T (°C)
histogramme
estimateur de la ddp(densité de probabilité) :
- non paramétrique- paramétrique
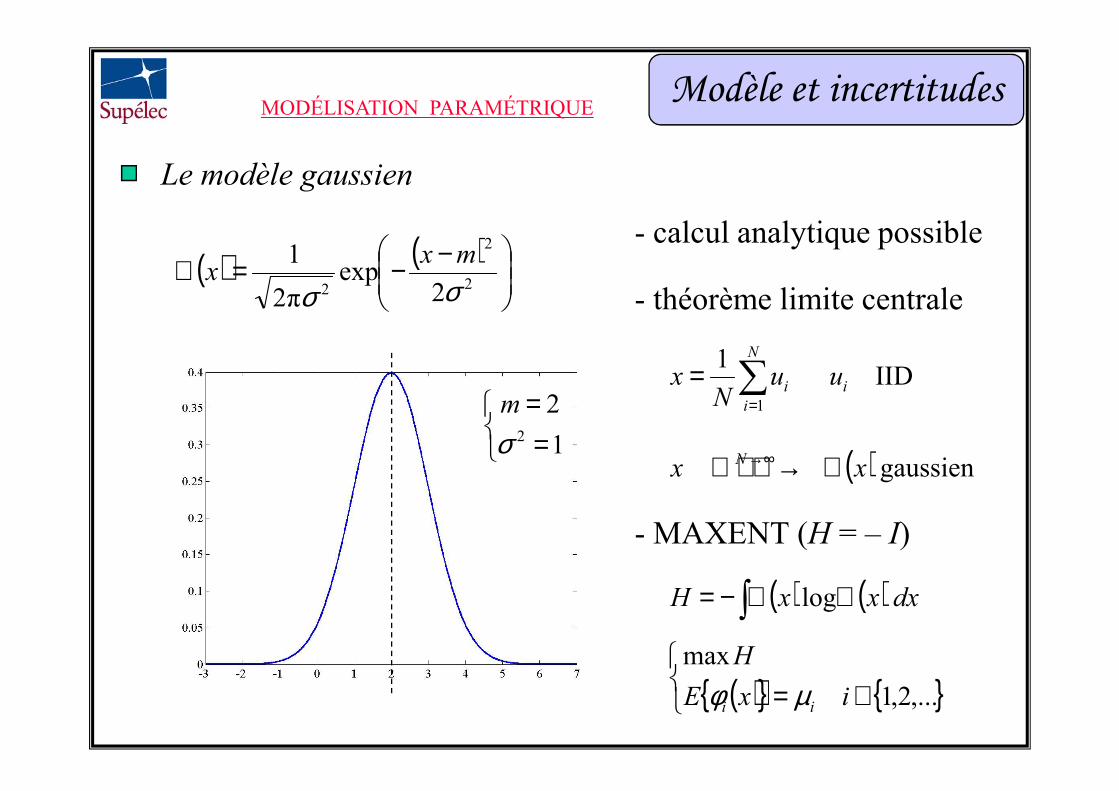
- calcul analytique possible
∑=
=N
iuNx
1
- théorème limite centrale
MODÉLISATION PARAMÉTRIQUE
Le modèle gaussien
( ) ( )
−−=℘2
2
2 2exp
π2
1
σσmx
x
= 2mIIDiu
Modèle et incertitudes
∑=iN 1
( )gaussienxx N ℘ → ∞→
- MAXENT (H = – I)
( ) ( ) dxxxH ∫ ℘℘−= log
( ){ } { }
∈= ,...2,1
max
ixE
H
ii µφ
==1
22σm

Autres modèles paramétriques
- lognormale, bêta (uniforme), gamma (exponentielle),…
Identification des paramètres de la loi
- méthode des moments- méthode du maximum de vraisemblance
MODÉLISATION PARAMÉTRIQUEModèle et incertitudes
- méthode du maximum de vraisemblance- approche bayésienne (a priori)
Tests d’ajustement
- test du Chi2- test de Kolmogorov-Smirnov- test de Cramer-von Mises- test de Wilcoxon-Mann-Whitney
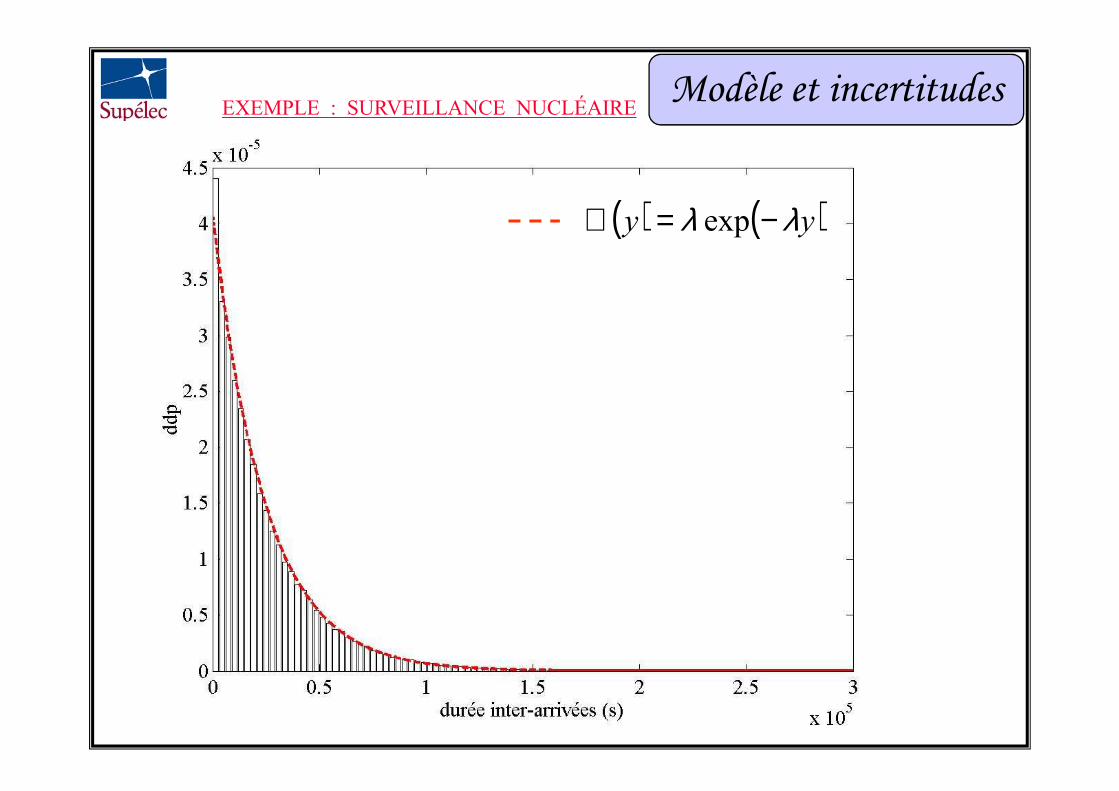
EXEMPLE : SURVEILLANCE NUCLÉAIRE
( ) ( )yy λλ −=℘ exp
Modèle et incertitudes

510.4ˆ −≈λMV
tests � rejet
EXEMPLE : SURVEILLANCE NUCLÉAIREModèle et incertitudes
tests � rejet(inadéquationdu modèle)
+∞
( ) ∑=
−=℘
N
k
k
h
yyK
hNy
1
11ˆ
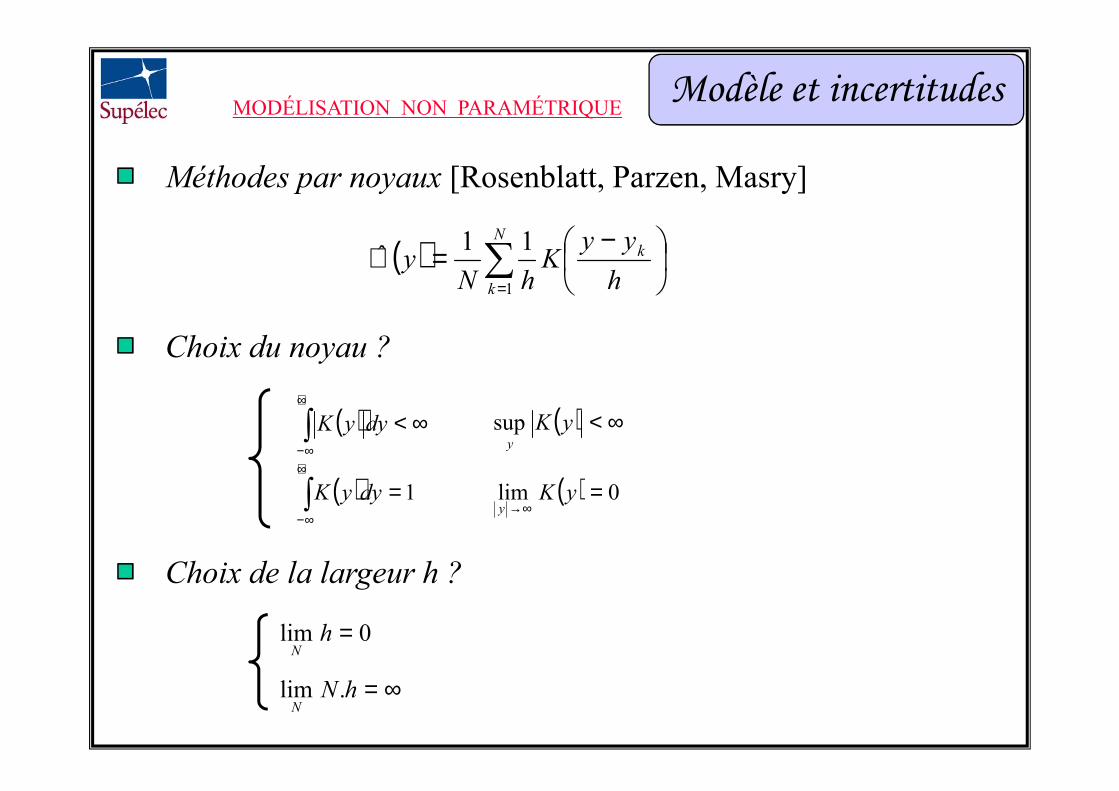
Choix du noyau ?
MODÉLISATION NON PARAMÉTRIQUE
Méthodes par noyaux [Rosenblatt, Parzen, Masry]
Modèle et incertitudes
( ) ∞<∫+∞
∞−
dyyK
( ) 1=∫+∞
∞−
dyyK
( ) ∞<yKy
sup
( ) 0lim =∞→
yKy
0lim =hN
∞=hNN
.lim
Choix de la largeur h ?

h = 1 h = 10-3
MODÉLISATION NON PARAMÉTRIQUEModèle et incertitudes
Compromisbiais-variance
biais importantvariance faible
biais faiblevariance importante
( )
( ) ( )( ) ( )
51
2
222
2
*
℘
=
∫∫
∫∞+
∞−
∞+
∞−
∞+
∞−
dyyKydyyN
dyyK
h( ) ( )( ){ }∫+∞
∞−℘−℘= dyyyEMISE
2ˆ
[Jones]
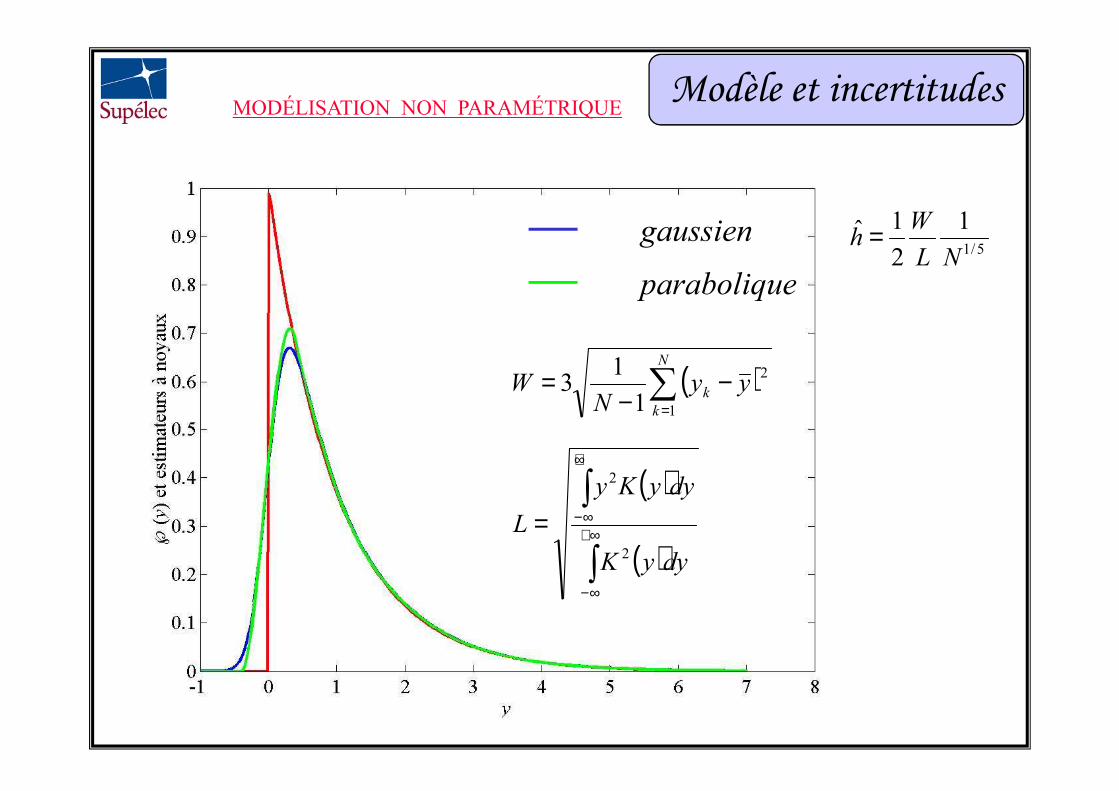
5/1
1
2
1ˆNL
Wh =
( )∑ −−
=N
k yyN
W 2
1
13
gaussien
parabolique
MODÉLISATION NON PARAMÉTRIQUEModèle et incertitudes
( )∑=
−−
=k
k yyN
W11
3
( )
( )∫
∫∞+
∞−
+∞
∞−=dyyK
dyyKy
L2
2

1. Estimer la ddp par une première approche par noyau classique
( ) ∑=
−=℘
N
k
k
h
yyK
hNy
1 11
1
11ˆ5/1
11
1
2
1
NL
Wh =
2. Estimer la dérivée seconde de la ddp au point y
Méthode par noyau optimisée (IRINCORREL) [Rivoira]
MODÉLISATION NON PARAMÉTRIQUEModèle et incertitudes
( ) ( ) ∑=
−=℘
N
k
k
h
yyK
hNy
1 22
2
2 11ˆ9/1
22
1
2
1
NL
Wh =
3. Estimer les largeurs optimales à partir de ces deux estimations
( ) ( )( ) ( )
51
2
1ˆ
ˆ
℘℘=
Ny
yLyhopt
4. Estimer la ddp au point y
( ) ( ) ( )∑=
−=℘
N
k opt
k
optopt yh
yyK
yhNy
1
11ˆ

gaussien
parabolique
« IRINCORREL »
MODÉLISATION NON PARAMÉTRIQUEModèle et incertitudes
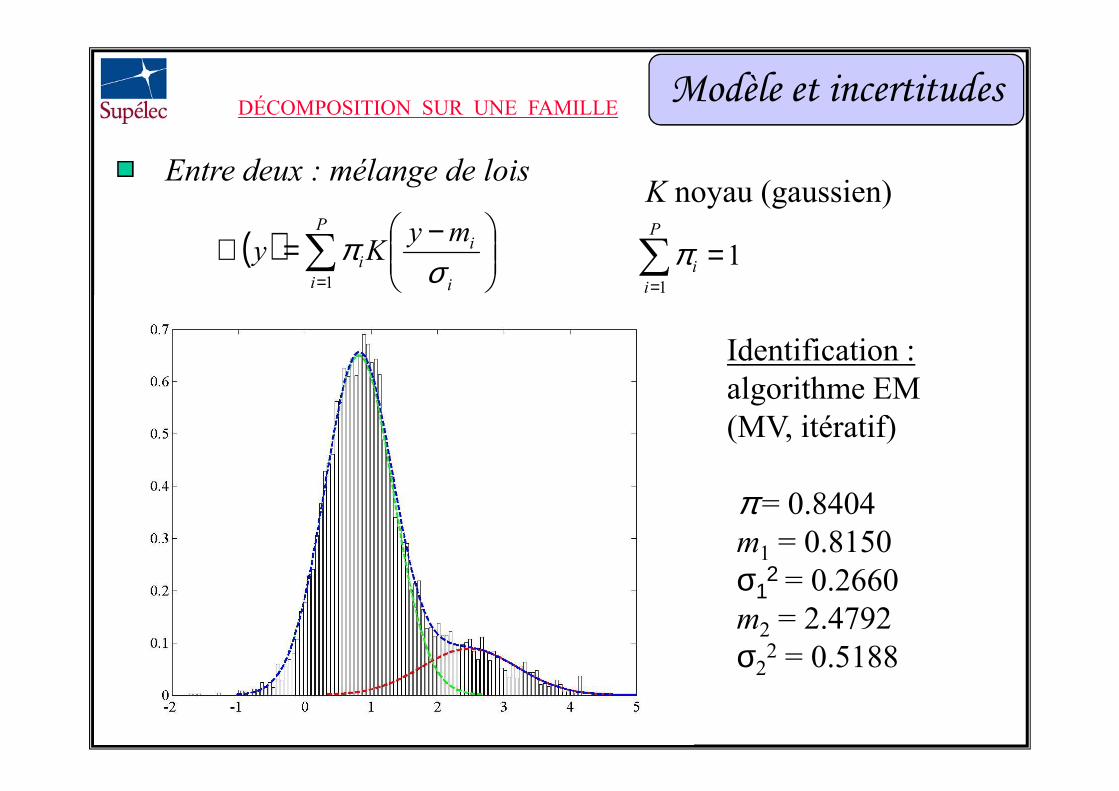
DÉCOMPOSITION SUR UNE FAMILLE
Entre deux : mélange de lois
( ) ∑=
−=℘P
i i
ii
myKy
1 σπ 1
1
=∑=
P
iiπ
K noyau (gaussien)
Identification :algorithme EM
Modèle et incertitudes
algorithme EM(MV, itératif)
π = 0.8404m1 = 0.8150σ1
2 = 0.2660m2 = 2.4792σ2
2 = 0.5188

Polynômes de chaos
( )∑=
=P
iiiPay
1
ξ ( )réduite centrée variable
polynôme.
ξiP
( ) ( ) ( )dPPPP δξξϕξξ == ∫+∞
,
- orthogonalité des polynômes
DÉCOMPOSITION SUR UNE FAMILLEModèle et incertitudes
( ) ( ) ( ) ijjiji dPPPP δξξϕξξ == ∫∞−
,
- dépend de la mesure ϕ(ξ) choisietyp. ξ gaussienne centrée réduite
� P polynôme de Hermite
( )( )( ) ( )( ) ( )
...
63
21
1
33
22
1
0
ξξξ
ξξ
ξξξ
−=
−=
==
P
P
P
P
y
x
x1 x2 x3 x4
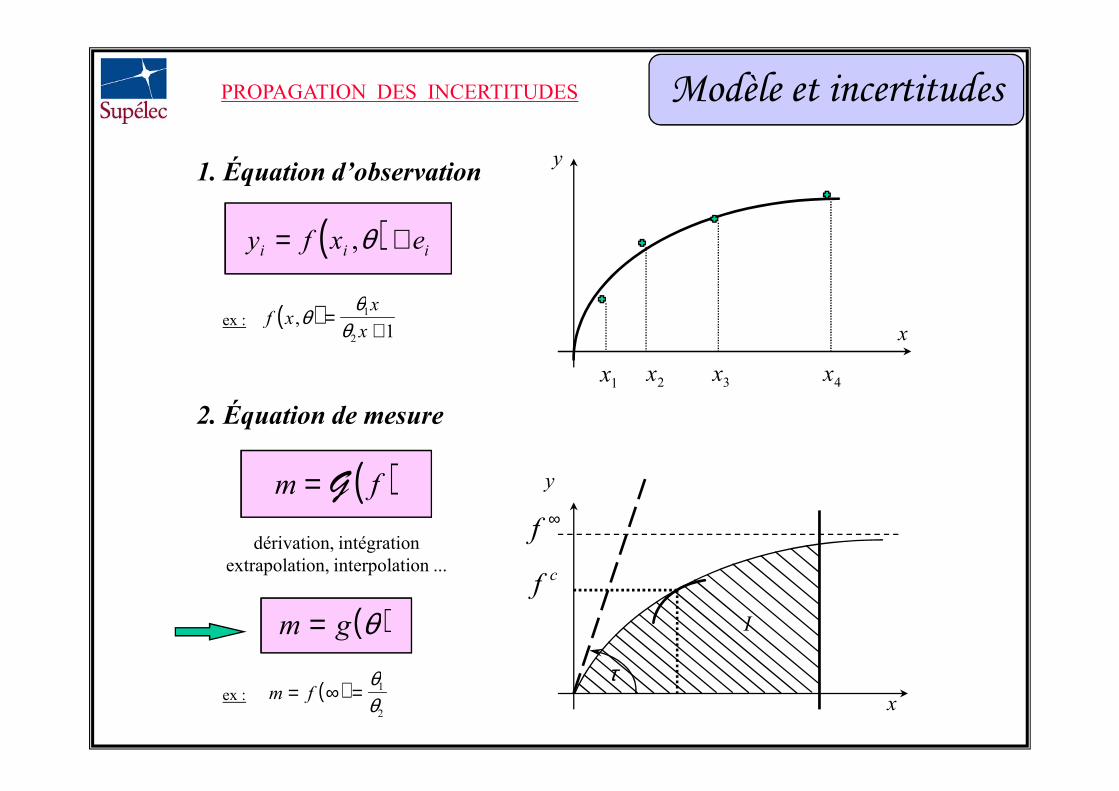
( )y f x ei i i= +,θ
1. Équation d’observation
( )f xx
x,θ
θθ
=+
1
2 1ex :
PROPAGATION DES INCERTITUDES Modèle et incertitudes
( )m f= G
dérivation, intégrationextrapolation, interpolation ...
( )m g= θ
ex : ( )m f= ∞ =θθ1
2x
y
I
f ∞
τ
f c
2. Équation de mesure

Expression littérale+∞
Différentes approches
( ) ( ) ( )℘ → ℘ → ℘ef g
m,ξ θθθθ
Modèle et incertitudes PROPAGATION DES INCERTITUDES
m = θ θ1 2 ( )( )
( )℘ =−
−−
+
−+∞
∫me
c c
mcm c1
1 22 2
2
12
22
22
22
2
2
0
21 2
1
1
2 1
1σ σ
σ σ σ θθσ
θθπ
expd
rq :
(géométrie différentielle)
Estimation de la DDP ( )℘ θθθθ [A. Pazman]
Approche Monte-Carlo (PMC, LHS, ... )
Estimation des deux premiers moments [G.P.Y. Clarke]
(développement en série de Taylor)
(biais, variance)

( )
+−+−=3
2134 exp1log,
θθθθθ x
xf θθθθ référence : Monte-Carlo
PROPAGATION PAR APPROXIMATION
[ ]b = −σ 2
1
2K B B ptr trL
T
( )( )V K Id V V V Ka b c= + + +σ σ2 2 T
(DL3)
(DL5)
biais
matrice de covariance
Approximation des deux premiers moments [Clarke]
Modèle et incertitudes
V V
VMC Lin
Lin
−=
%
. . . .
. . .
. .
.
16 2 27 4 17 1 14 5
39 2 28 5 30 8
16 4 12 1
51
V V
VMC NonLin
NonLin
−=
4
4
3 6 55 38 4 9
8 2 5 9 7 2
4 0 3 7
2 1
%
. . . .
. . .
. .
.
NL
-3 -2 -1 0 1 2 3 4 5 6
1
2
3
4
5
6
7
8
9
x
L
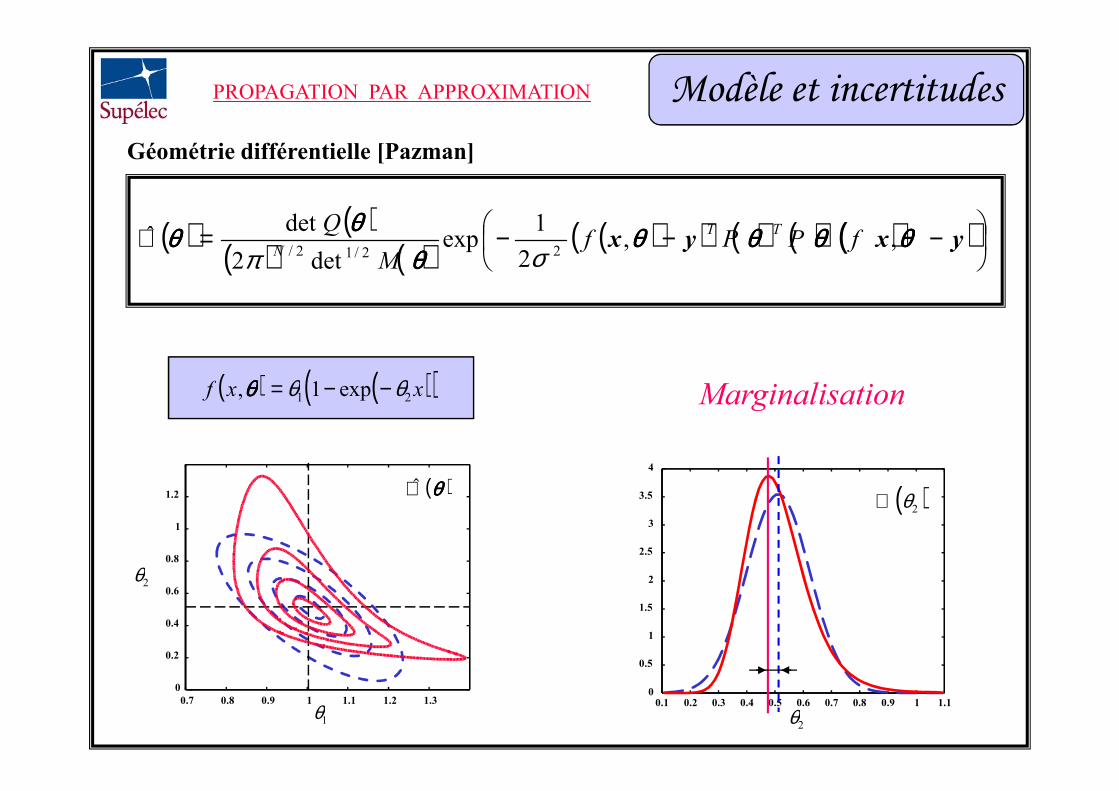
Géométrie différentielle [Pazman]
( ) ( )( ) ( ) ( )( ) ( ) ( ) ( )( )
−−−=℘ yxyx θθθθθθθθθθθθθθθθθθθθ
θθθθθθθθ ,,2
1exp
det2
detˆ22/12/
fPPfM
Q TT
N σπ
( ) ( )( )f x x, expθθθθ = − −θ θ1 21
Modèle et incertitudes
Marginalisation
PROPAGATION PAR APPROXIMATION
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.10
0.5
1
1.5
2
2.5
3
3.5
4
θ2
( )℘ θ2
( )$℘ θθθθ
0.7 0.8 0.9 1 1.1 1.2 1.30
0.2
0.4
0.6
0.8
1
1.2
θ2
θ1
( ) ( )( )f x x, expθθθθ = − −θ θ1 21 Marginalisation

Plan
Modélisation des incertitudes- approches paramétriques- approches non paramétriques
Choix d’un modèle de système- choix de la complexité d’un modèle- choix d’un modèle de comportement- choix d’un modèle de comportement- choix de la paramétrisation d’un modèle- vers des méta-modèles
Aides à la prise de décision- Estimation d’évènements rares- Optimisation d’un système complexe
Exemples d’application

Choix de modèle emboîtés
Nombreux critères dans la littérature (choix de l’ordre). VC. AIC, MDL. BIC, MAP. KICc (optimalité non asymptotique) [Bekara]
Choix de modèle COMPLEXITÉ D’UN MODÈLE
Critère de choix lié à un objectif donné. Critères de type moindres carrés. Distance entre densités de probabilité
Choix de modèles quelconques
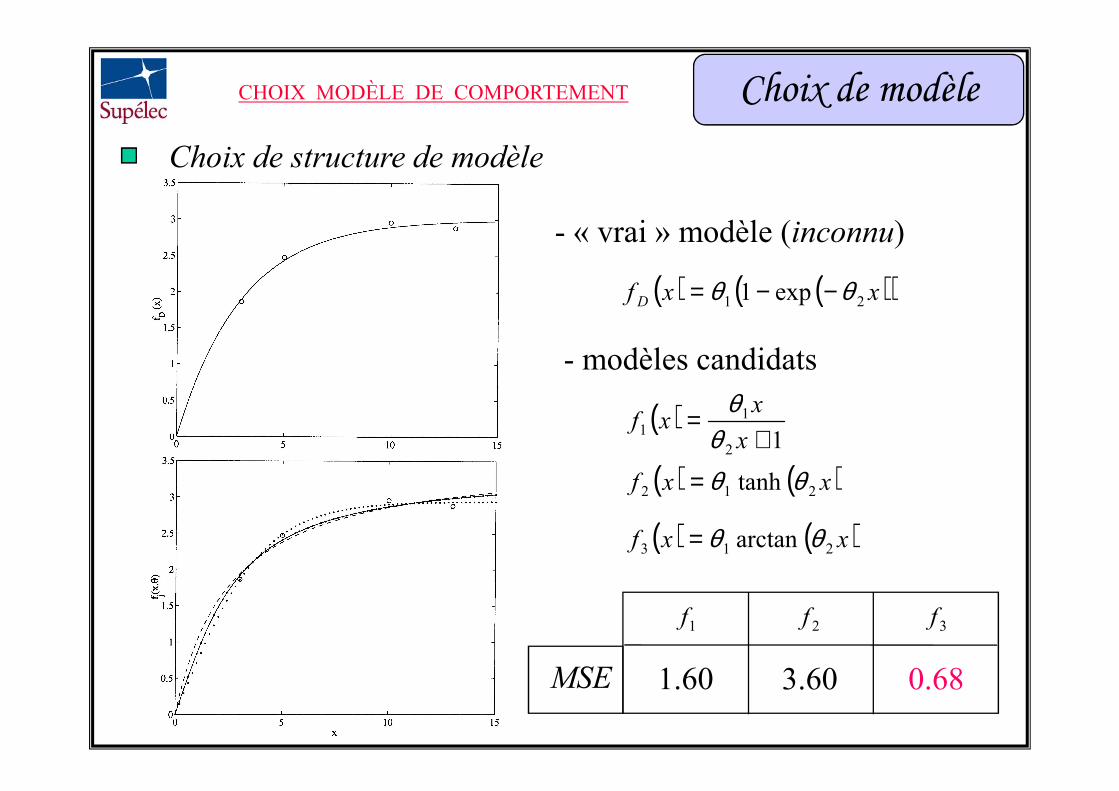
Choix de structure de modèle
( ) ( )( )xxf D 21 exp1 θθ −−=
( ) xθ
- « vrai » modèle (inconnu)
- modèles candidats
Choix de modèle CHOIX MODÈLE DE COMPORTEMENT
( ) ( )xxf 212 tanh θθ=
( ) ( )xxf 213 arctan θθ=
( )12
11 +
=x
xxf
θθ
1f 2f 3f
1.60 3.60 0.68MSE

Choix de structure de modèle
Choix de modèle CHOIX MODÈLE DE COMPORTEMENT
( )θθθθ̂ˆj℘
ddp des paramètres(Pazman) :
� HPC

1) ddp de l’objectif ( )mj℘̂ 2) distance entre ddps k∆
1f 2f 3f
0.317 1.233 0.688
0.514 1.473 0.888
1∆
∆
Choix de structure de modèle
Choix de modèle CHOIX MODÈLE DE COMPORTEMENT
1θ
21θθ
21θθ1θ
21 θθ
21πθ
( )( )II xx 22221 1log θθθθ +−
( )( )Ix221 coshlog θθθ
( ) ( )2222121 1log2arctan III xxx θθθθθ +−
1f
2f
3f
Sm Am Im
1 3 2
0.095 1.377 0.258
0.514 1.473 0.8882∆
3∆

Choix de modèles
structure
structureparamétrée
•• + •
x
x
θθ
1
1
x
x +
Code de générationformelle de modèles
Choix de laparamétrisation
Choix de la paramétrisation d’une structure
PARAMÉTRISATION ET MODÈLES
paramétrée
fonction
θ2 1x +
3
4 1
x
x +
paramétrisation
Procédured’estimation / d’identification
( )f xx
xθθ
θ=+
1
2 1( )f x
x
xϕ ϕ ϕ=
+1 2Pourquoi choisir plutôt que ?

- Influence sur la mesure
t homéomorphisme
( )θθθθ ϕϕϕϕ= treparamétrisation :
Choix de modèles
Pour optimiser la phase d’identification des paramètres !
PARAMÉTRISATION ET MODÈLES
m dépend d’un θi
t homéomorphisme( ) ( )℘ = ℘m mθ ϕ
- Comment optimiser la reparamétrisation
θθθθ ϕϕϕϕ?
critère d’optimalité ?
“Optimal Nonlinear Modeling and Reparameterization”, IEEE WISP, 1999.
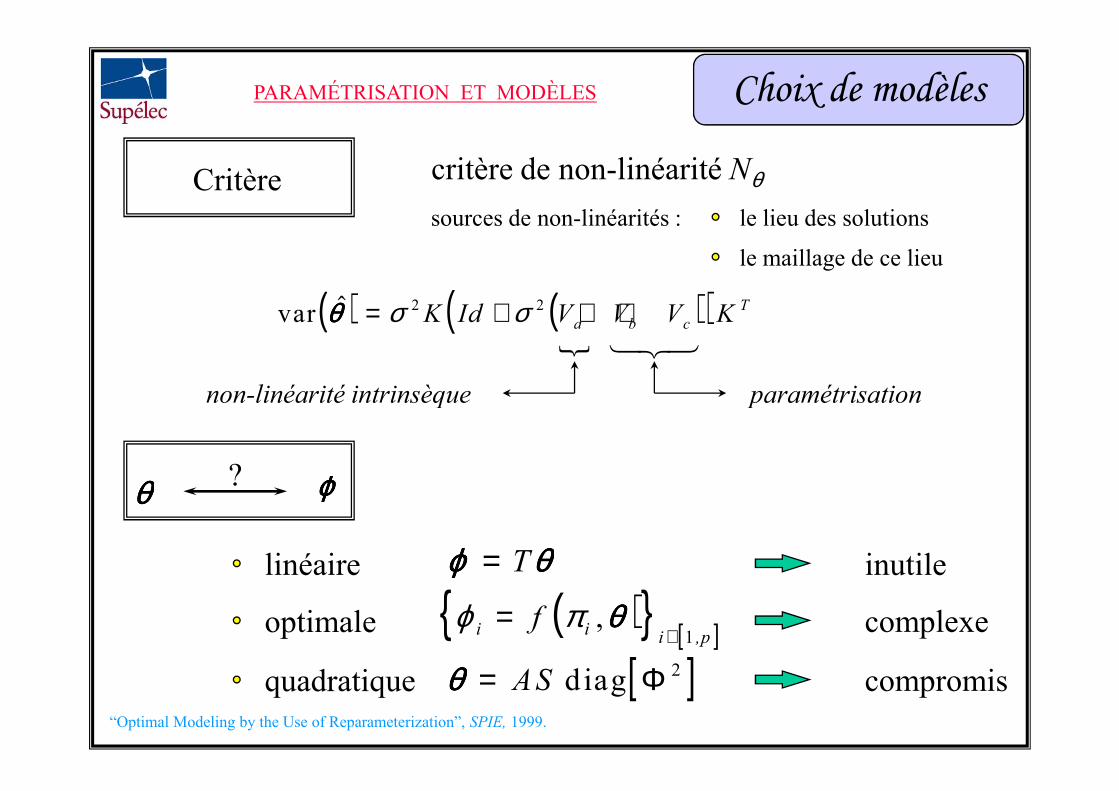
Critère critère de non-linéarité Nθ
sources de non-linéarités : le lieu des solutions
le maillage de ce lieu
( ) ( )( )var $θθθθ = + + +σ σ2 2K Id V V V Ka b cT
non-linéarité intrinsèque paramétrisation
123{
Choix de modèles PARAMÉTRISATION ET MODÈLES
θθθθ ϕϕϕϕ?
non-linéarité intrinsèque paramétrisation
ϕϕϕϕ θθθθ= Tlinéaire inutile
( ){ } [ ]ϕ πi i i ,pf=
∈,θθθθ
1optimale complexe
[ ]θθθθ = AS diag Φ 2quadratique compromis“Optimal Modeling by the Use of Reparameterization”, SPIE, 1999.

Exemple
( )f xx
x,θθθθ =
+θ
θ1
2 1
[ ]θθθθ 0 3 2 1 2=T
Choix de modèles PARAMÉTRISATION ET MODÈLES
[ ]x = 1 20LT
σ 2 0 1= .
( ) ( )( ) ( )f x
x
xϕ
π π ϕ ϕπ ϕ π ϕ π π ϕ ϕ
=− ⋅
− ⋅ + −1 2 1 2
1 2 2 1 1 2 1 2

structures
( )θ θ1 2 1x x +
( )θ θ1 2x x +
( )x xθ θ1 2+
quadratique
optimale
N θ ρ n it σ m ax
4.304
1.408
0.797
0.263
0.201
0.997
0.969
0.808
0.203
0.078
16.2
13.9
12.0
11.6
10.6
X
6.426
0.634
0.512
0.415
Choix de modèles PARAMÉTRISATION ET MODÈLES
densités de probabilité
optimisation :
décorrélation
temps de calcul
robustesse numérique

Choix de modèle VERS DES MÉTA-MODÈLES
Littérature

Choix de modèle
Krigeage [Vazquez]
( )y f x ei i i= +,θ
( ) ( )iiii xexfy ωθ ++= ,
erreur de modélisation
VERS DES MÉTA-MODÈLES
erreur de modélisationprocessus gaussien
( ) ( ) ( ){ }jiji xxExxk ωω=,- covariance
- moyenne nulle
( ) ( ) ( )hkxxkxxk jiji =−=,
modèle : structure de la covariance
( ) ( )22exp ρhhk −=ex. …
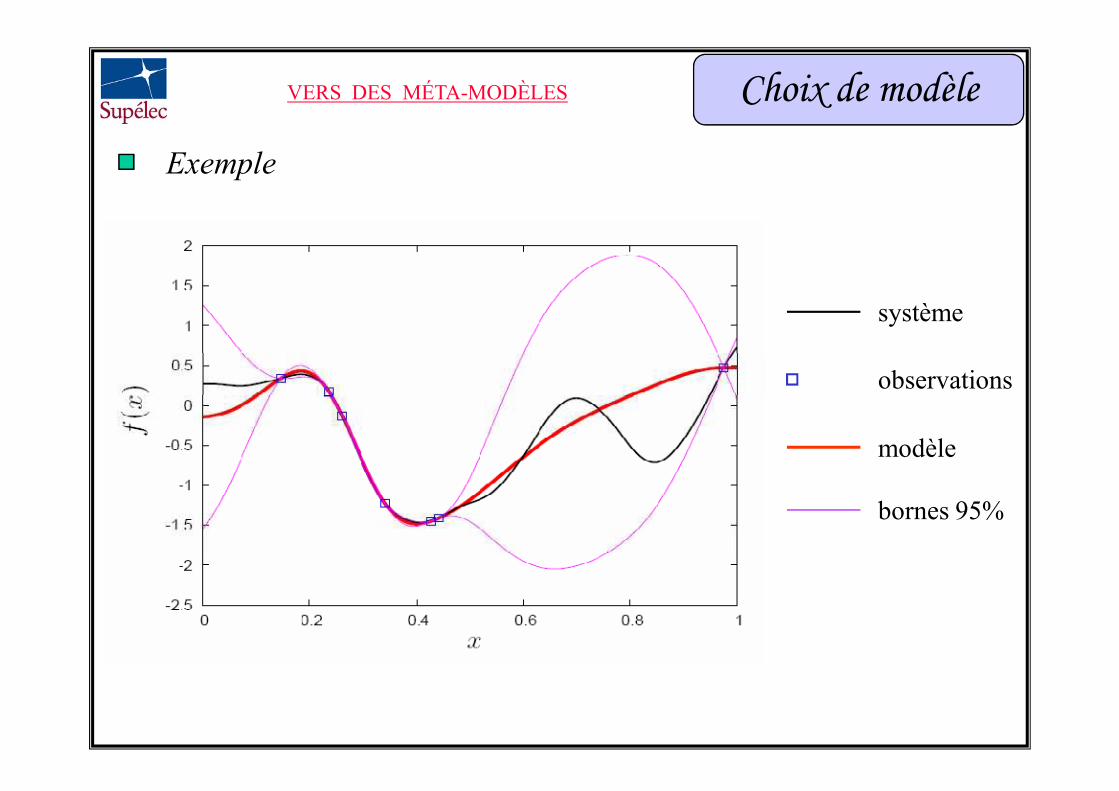
Exemple
Choix de modèle
système
observations
VERS DES MÉTA-MODÈLES
modèle
bornes 95%
Plan
Modélisation des incertitudes- approches paramétriques- approches non paramétriques
Choix d’un modèle de système- choix de la complexité d’un modèle- choix d’un modèle de comportement- choix d’un modèle de comportement- choix de la paramétrisation d’un modèle- vers des méta-modèles
Aides à la prise de décision- Estimation d’évènements rares- Optimisation d’un système complexe
Exemples d’application

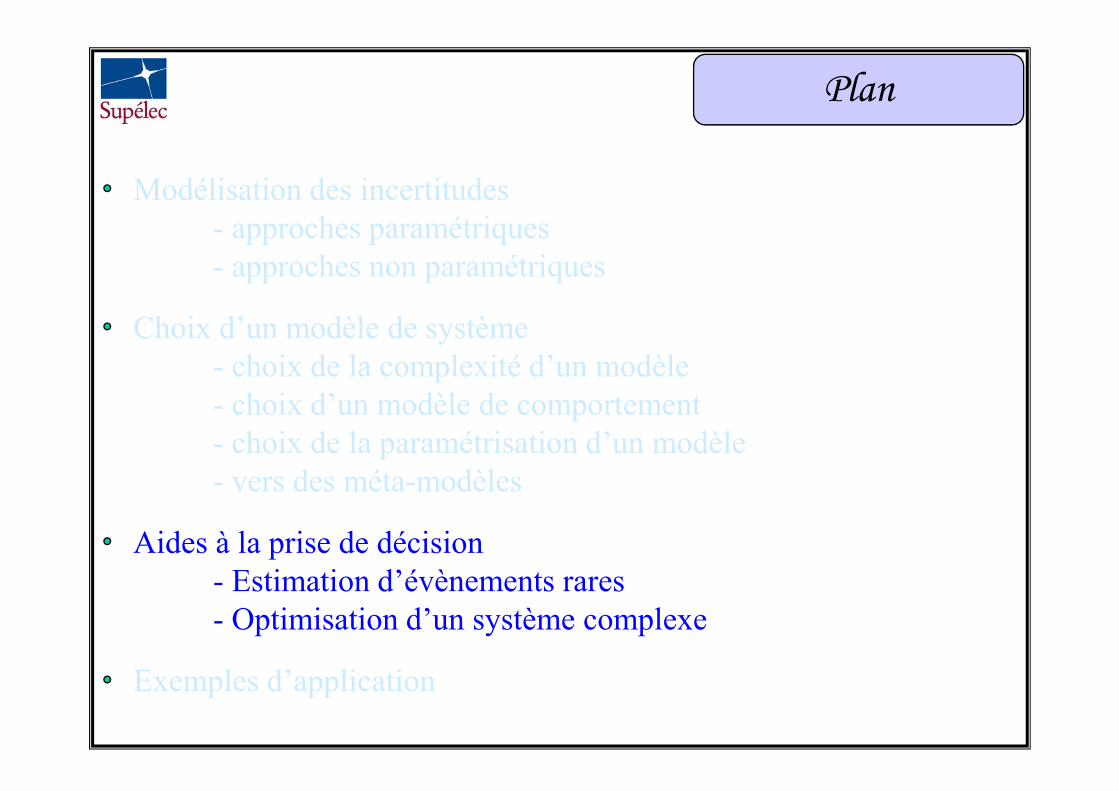
Prise de décision ESTIMATION D’ÉVÈNEMENTS RARES

Prise de décision ESTIMATION D’ÉVÈNEMENTS RARES
Prise de décision ESTIMATION D’ÉVÈNEMENTS RARES

Prise de décision ESTIMATION D’ÉVÈNEMENTS RARES
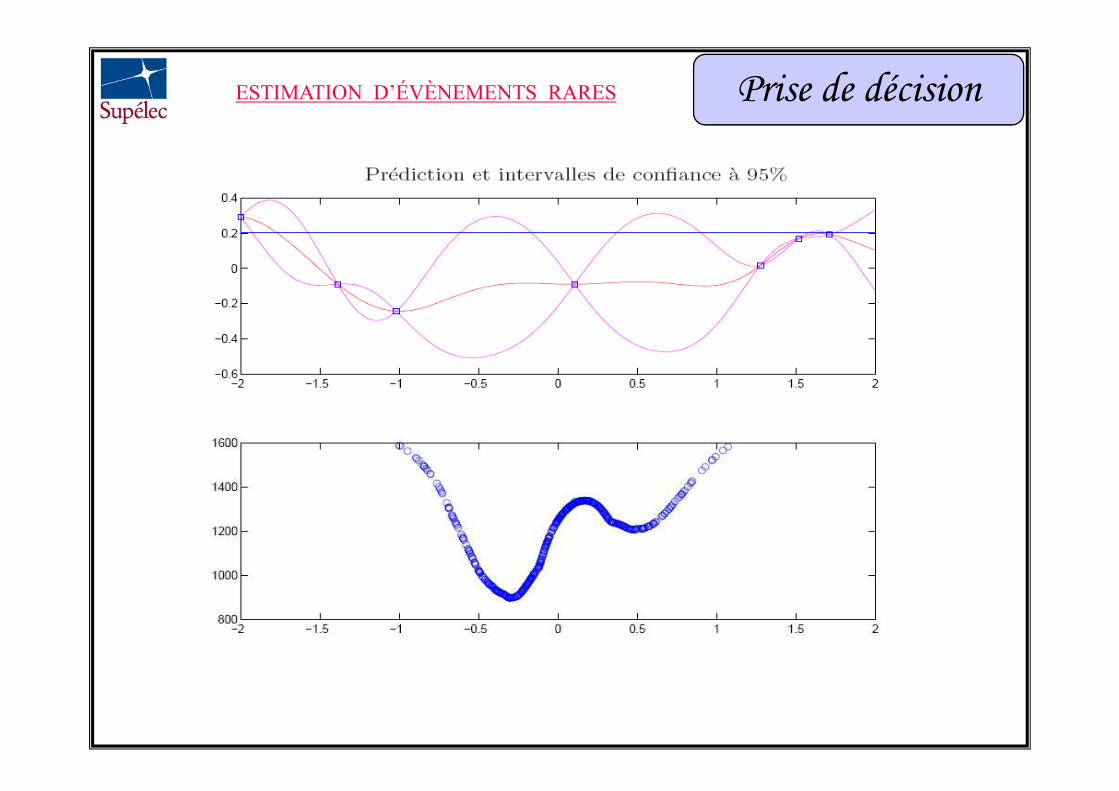
Estimation d'un quantile à 99.9%
à partir de 200 données par classification
SVM et utilisation de la théorie statistique
des valeurs extrêmes
Prise de décision ESTIMATION D’ÉVÈNEMENTS RARES
Détermination de quantiles multidimensionnels extrêmes et détection d’outliers[M. Piera-Martinez et E. Vazquez (2006)]
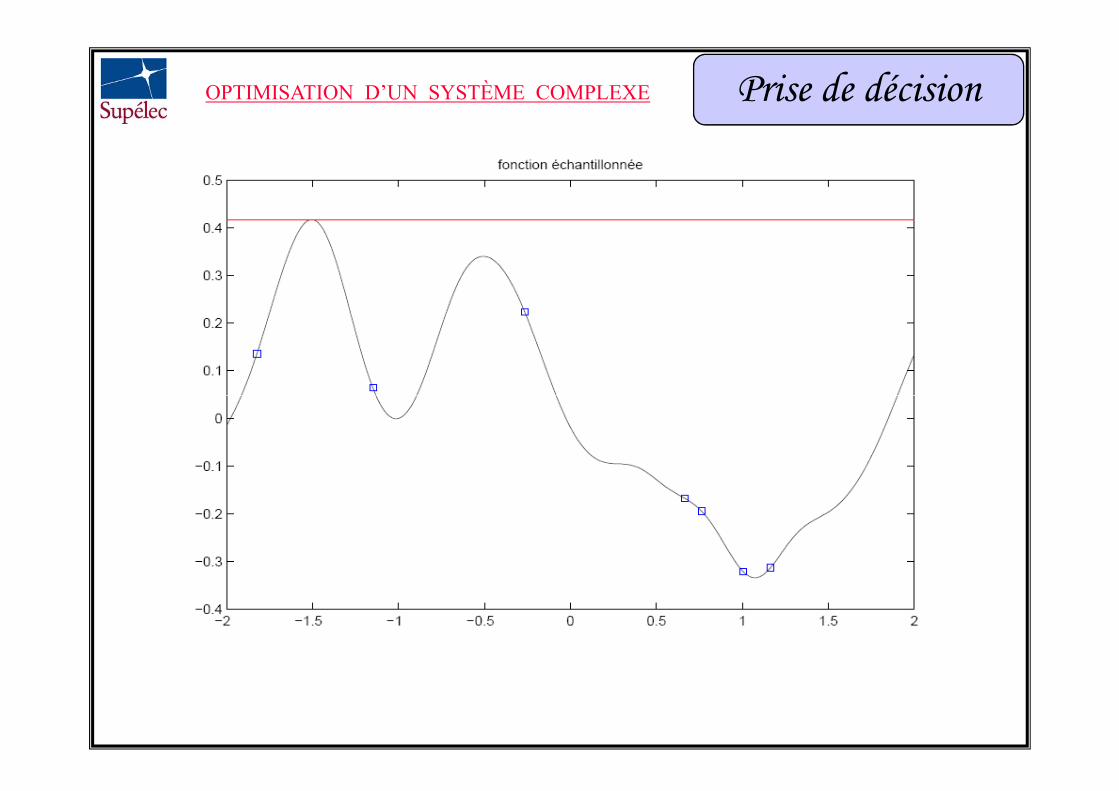
Prise de décision OPTIMISATION D’UN SYSTÈME COMPLEXE
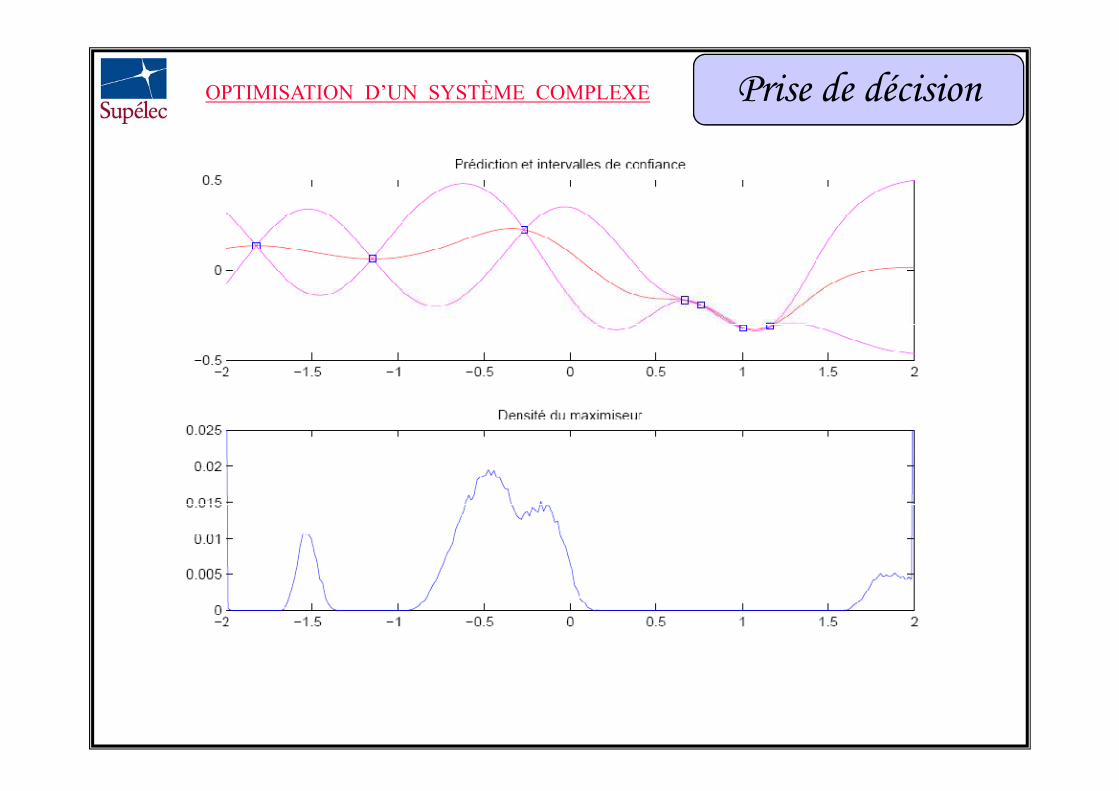
Prise de décision OPTIMISATION D’UN SYSTÈME COMPLEXE
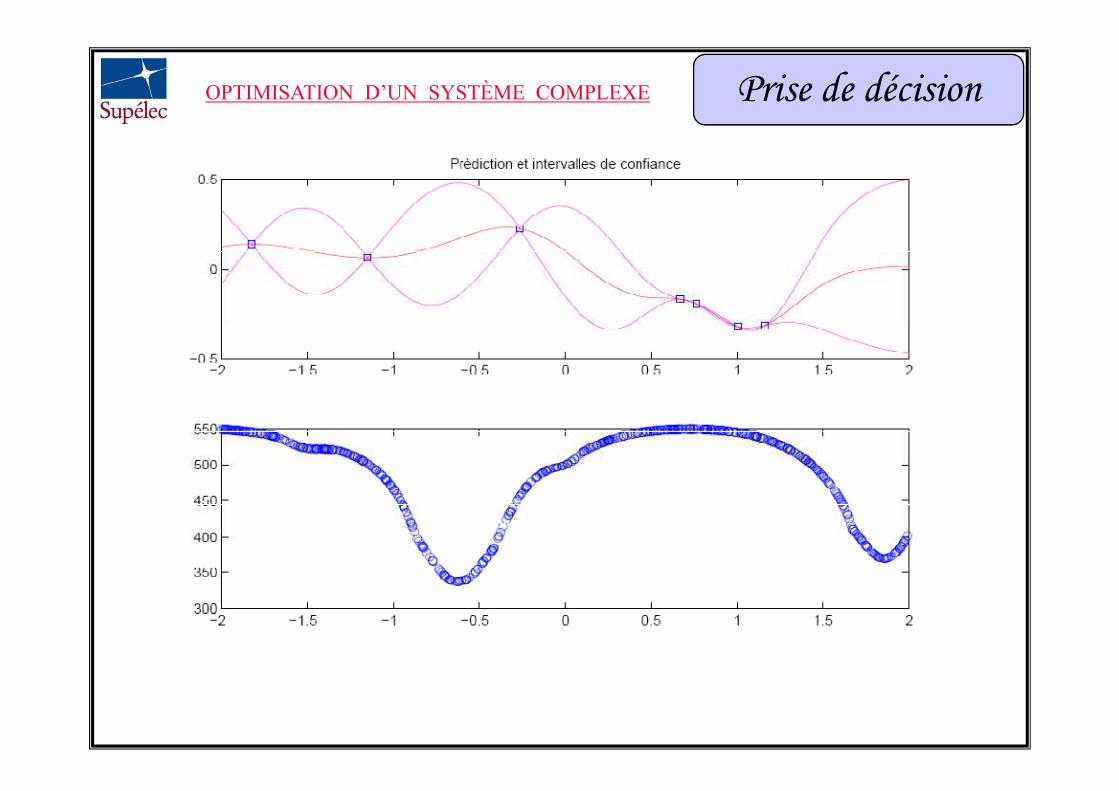
Prise de décision OPTIMISATION D’UN SYSTÈME COMPLEXE
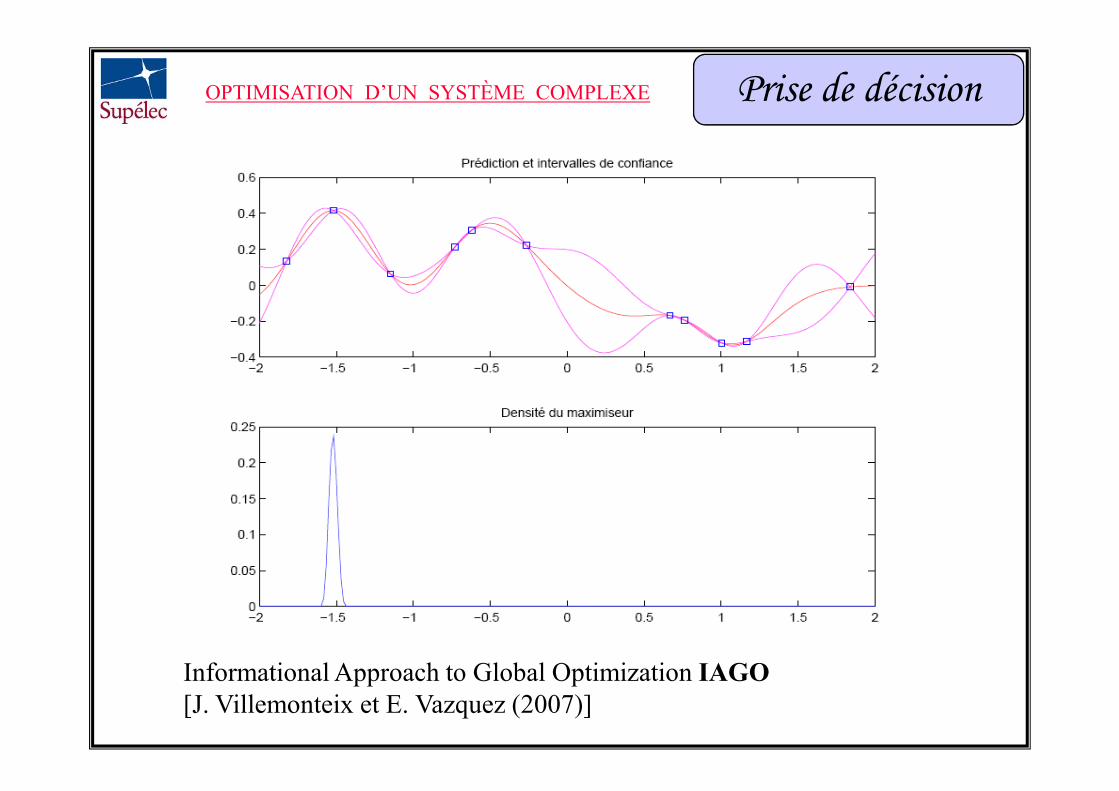
Prise de décision OPTIMISATION D’UN SYSTÈME COMPLEXE
Informational Approach to Global Optimization IAGO[J. Villemonteix et E. Vazquez (2007)]

Plan
Modélisation des incertitudes- approches paramétriques- approches non paramétriques
Propagation des incertitudes- par approximations- par simulations
Choix d’un modèle de système- choix d’un modèle de comportement- vers des méta-modèles
Aides à la prise de décision- Estimation d’évènements rares- Optimisation d’un système complexe
Exemples d’application

Applications
Estimation de SAR (GSM)
ESTIMATION ROBUSTE
Données :- champ électromagnétique mesuré(norme : 3D, 600 points)- 70 portables testés
Méthodes : - réseaux de neurones- modélisation paramétrique (11 ddl) � 20 points
Conclusion :estimation du SAR avec une très bonne précision
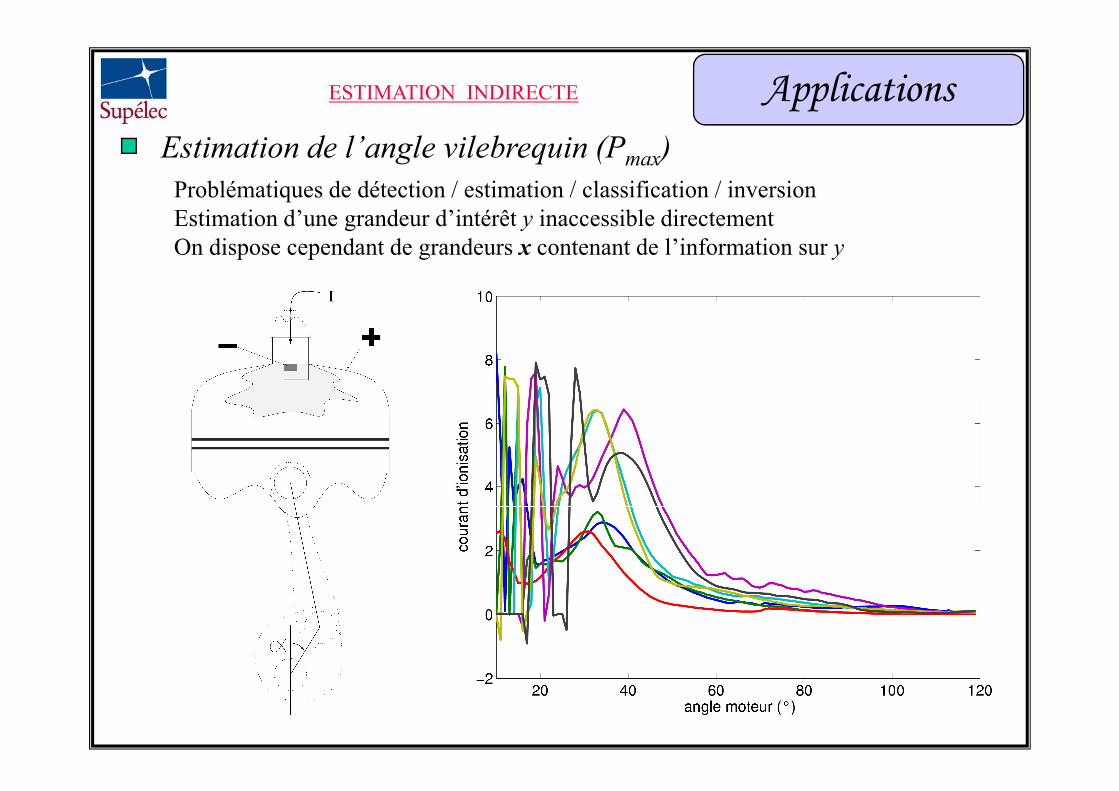
Problématiques de détection / estimation / classification / inversionEstimation d’une grandeur d’intérêt y inaccessible directementOn dispose cependant de grandeurs x contenant de l’information sur y
Applications ESTIMATION INDIRECTE
Estimation de l’angle vilebrequin (Pmax)

Applications DESIGN DE STRUCTURE MÉCANIQUE
Optimisation d’un conduit d’admission

Systèmes hybrides stochastiques (thermostat)
ESTIMATION DYNAMIQUE Applications

Conclusion
L’aléatoire est un modèle qui permet
L’aléatoire est assez incontournable du fait- de la méconnaissance- de perturbations de l’environnement- de la miniaturisation des composants- de la complexité croissante des systèmes
L’aléatoire est un modèle qui permet- d’éviter la surparamétrisation- d’éviter de surestimer des marges de sécurité- de quantifier la robustesse de systèmes
De nombreux travaux en cours- recherche- applications- regroupement de partenaires… (MASCOTNUM, ISRI, CSDL, …)
