modelo de simulación computacional en · pdf fileforces and a simplified longitudinal...
TRANSCRIPT

MODELO DE SIMULACIÓN COMPUTACIONAL EN TIEMPO REAL DE
ACELERACIÓN DE UN AUTOMÓVIL EN DIFERENTES SUPERFICIES DE
RODAMIENTO.
Gustavo R. Di Rado Universidad Nacional del Nordeste
Facultad de Ingeniería
Daniel Sergio Presta García Universidade Federal do Rio Grande do Sul
Departamento de Design e Expressão Gráfica e Design
RESUMEN
El concepto de simulador de conducción existe desde los años 70 y fue ganando importancia a través del tiempo
con el desarrollo de nuevos computadores capaces de representar gráficos en tres dimensiones (3d) de alta
calidad. Numerosas investigaciones han demostrado que los simuladores interactivos son una buena alternativa
para obtener datos bajo condiciones controladas en el laboratorio, mejor que en la realidad, lo que evita riesgos
de vida y gastos de tiempo y dinero para construir los equipamientos necesarios para hacer estos mismos ensayos
in situ. Esta situación contribuye de gran manera a la realización de distintas pruebas en los diversos campos de
la seguridad vial.
El neumático es el principal elemento de interacción entre el vehículo y la carretera. En su interface se generan
fuerzas de acción y reacción, que son las responsables de dar tracción, frenado y direccionamiento al medio de
transporte en cuestión. En este trabajo se presenta un análisis de las fuerzas que actúan sobre el neumático y un
modelo simplificado de simulación de dinámica longitudinal utilizando un motor de combustión interna de
encendido por chispa y tomando en cuenta las fuerzas resistentes que se oponen al movimiento del vehículo
virtual sobre la superficie terrestre en diferentes tipos de terreno (llanos u ondulados) y bajo diferentes
condiciones ambientales. El objetivo principal del proyecto es el diseño de un simulador de conducción de
automóviles para su utilización en la verificación de la consistencia geométrica de carreteras.
ABSTRACT
The driving simulator concept has existed since the 70's, and became more important over time with the
development of new computers capable of representing high quality 3D graphics. Several investigations have
shown that interactive simulators are a good alternative to obtain data under controlled laboratory conditions,
rather than in reality, avoiding risks to human life and waste of time and money to build the necessary equipment
to do the same tests in situ. This contributes greatly to the performance of several tests in the various fields of
road safety.
Tire is the main element of interaction between the vehicle and the road. In its interface are generated action and
re-action forces that give traction, brake and steering capacity to the transport. In this work a review of the tire
forces and a simplified longitudinal dynamic simulation model is presented, using an internal combustion engine
and considering the movement resistance forces over different road surfaces and weather condition. The main
objective is the development of a driving simulator for geometric consistency verification of roads.
1. INTRODUCCIÓN
La estructura vial se compone de tres elementos fundamentales: El Conductor, El vehículo y
La Vía. Estas variables constituyen las bases sobre las cuales se funda la seguridad vial, y
como ninguna de ellas puede ser considerada de forma individual, su interacción debe ser
revisada exhaustivamente para asegurar resultados con un grado de eficiencia aceptable,
Roess et al. (2004).
Otra instancia a tener en cuenta es la condición del medio ambiente (lluvia, niebla, noche,
carpeta de rodamiento resbaladiza, etc.) la cuál cumple un rol muy importante en la
disminución de la capacidad de conducción de vehículos.
La Ingeniería de tráfico sería mucho más sencilla si los distintos componentes del sistema de
tránsito tuvieran características uniformes. Los dispositivos de control de tráfico serían
fácilmente diseñados si todos los conductores reaccionaran a ellos en la misma forma con lo
que finalmente la seguridad podría lograrse también más fácilmente. Lo cierto es que hay una
diversidad de elementos importantes a considerar y difíciles de interrelacionar a través de un
modelo de representación confiable.
En los vehículos terrestres, las fuerzas principales de control, tracción y frenado son
generadas a nivel de la interface rueda-camino en la superficie de contacto, así como también
el confort de marcha y el consumo de combustible, Genta G. (2006). El estudio y análisis del
sistema dinámico generado, es de vital importancia para simular de forma precisa el
comportamiento vehicular, a través del ajuste de diferentes parámetros en las ecuaciones
involucradas.
Dos tipos de circunstancias pueden ser abordadas con interés para la modelación matemática.
Una es la mecánica de los neumáticos circulando en superficies rígidas (hormigón, asfalto,
etc), y la otra es la mecánica de neumáticos circulando en superficies deformables como por
ejemplo arena, ripio, etc. En este artículo se abordarán ambas situaciones, se realizarán
pruebas de aceleración en tramos rectos especialmente modelados al efecto, y se obtendrán las
curvas de performance en tiempo real, para evaluar los diferentes terrenos.
2. MECÁNICA DE UN NEUMÁTICO
La mecánica del neumático se evalúa en este trabajo a partir de las propiedades relacionadas
con su estructura y su radio efectivo.
2.1. Estructura
La estructura rígida de una rueda está rodeada por un elemento flexible con forma de toroide
con aire comprimido en su interior. La parte más importante de un neumático es la carcasa
que está compuesta por hilos entrelazados con módulo de elasticidad elevado, insertas en un
compuesto de caucho con un módulo de elasticidad bajo. Las hilos son fabricados de material
sintético o compuestos metálicos, y están ancladas en el talón, que es fabricado de un cable de
acero de alta resistencia revestido con caucho, que se asienta sobre la llanta y transfiere las
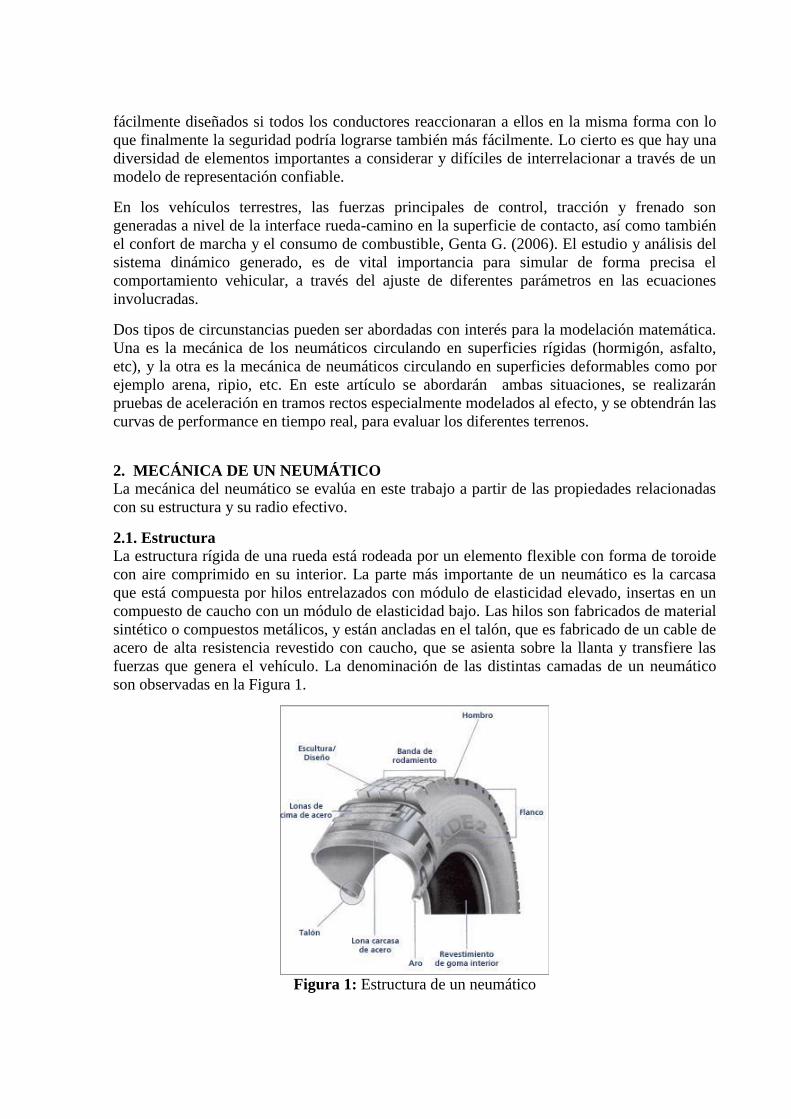
fuerzas que genera el vehículo. La denominación de las distintas camadas de un neumático
son observadas en la Figura 1.
Figura 1: Estructura de un neumático

La resistencia del neumático es frecuentemente descripta por el número de carcasas que
posee. Algunos automóviles tienen dos carcasas, mientras los aviones comerciales llegan a
tener 30 o más. Las capas internas están fabricadas de diferentes tejidos de poliéster. La capa
superior ayuda a sostener la estructura en neumáticos aptos para circular a altas velocidades.
La parte interna de la carcasa está compuesta por una fina capa de caucho butilo con alta
impermeabilidad al aire para evitar perdida de presión en neumáticos sin cámara.
Los cinturones son capas de acero, nylon, poliéster, kevlar, etc. revestidas de caucho
extendidas alrededor del neumático por debajo de la banda de rodamiento. Están diseñados
para reforzar la carcasa y mantener la banda de rodamiento contra el camino para que haga el
mejor contacto posible. Los cinturones evitan la torsión y resisten el daño por impactos y
penetraciones.
El flanco provee estabilidad lateral y protege la carcasa ayudando a prevenir el escape de aire.
La banda de rodamiento es la porción del neumático que toma contacto con el camino, está
confeccionada de una mezcla de caucho sintético y natural y posee un patrón o dibujo acorde
al propósito con que es fabricada la cubierta. Es de mayor importancia en la estructura general
del neumático, porque de su compuesto depende la adherencia, gran parte del control y
estabilidad en las curvas, la tracción y la posibilidad de que el vehículo sea incidido por el
fenómeno de "aquaplaning" en carreteras afectadas por lluvias intensas.
Estructuralmente, existen dos tipos de neumáticos: diagonales y radiales. En las cubiertas
radiales los hilos de la carcasa son colocados perpendiculares a la banda de rodamiento. Con
esto se obtiene mayor flexibilidad radial, reducción de la resistencia a la rodadura, y mejora
las capacidades en curvas.
En el Mercosur los neumáticos son identificados con una serie de cuatro números y dos letras,
como por ejemplo 215/65R16 98H, lo que implica:
215: Ancho de la cubierta descargada de flanco a flanco en mm (An).
65: Indica que la altura del flanco es el 65% del ancho (Pa).
R: Cubierta radial.
16: Diámetro de la llanta en pulgadas (Dc)
98: Código que indica el peso máximo que soporta el neumático, en este caso 750 kg.
H: Velocidad máxima a la cuál puede llegar el vehículo por 10 minutos antes de
producirse daños irreversibles, en este caso 210 kph.
De esta manera se puede obtener el radio geométrico en mm sin inconvenientes Ec. (1).
2
4.252100
DcPa
An
rg (1)
2.2. Radio Efectivo
El radio efectivo o radio dinámico de un neumático se debe a su condición de estar fabricado
con un material elasto-plástico, es decir deformable bajo carga y en operación. Si
consideramos una rueda de material rígido, la relación entre la velocidad angular de la rueda
R y la velocidad lineal de la misma vR, es simplemente:
gRR rv (2)
En donde rg, es el radio geométrico.
Sin embargo, para una rueda de caucho, debemos definir el radio efectivo, como la relación
existente entre la velocidad angular y la velocidad lineal, pero medida efectivamente en
campo. Como aproximación, podemos decir que el radio efectivo de un neumático radial es:
ge rr 98.0 (3)
Y para un neumático diagonal:
ge rr 96.0 (4)
Esto es porque el neumático radial tiene menor rigidez radial que el diagonal. El radio
efectivo depende de varios factores como por ejemplo, carga sobre la rueda, presión de
inflado, desgaste de la cubierta, etc. Un elemento para analizar en detalle es la velocidad de
giro de la rueda, ya que esto provoca su expansión debido a las fuerzas centrífugas,
aumentando los respectivos radios geométrico, efectivo y cargado. Los neumáticos
diagonales, expanden más que los radiales, debido a que estos últimos tienen una banda de
rodamiento mucho más rígida que los primeros. En el presente trabajo, se ha tomado el valor
de la Ec. (3), ya que los vehículos actuales vienen equipados con neumáticos radiales.
3. ACELERACIÓN
El análisis de la aceleración debe considerar las fuerzas actuantes, la fuerza entregada por el
motor, la resistencia a la rodadura y la fuerza aerodinámica.
3.1. Fuerzas Actuantes
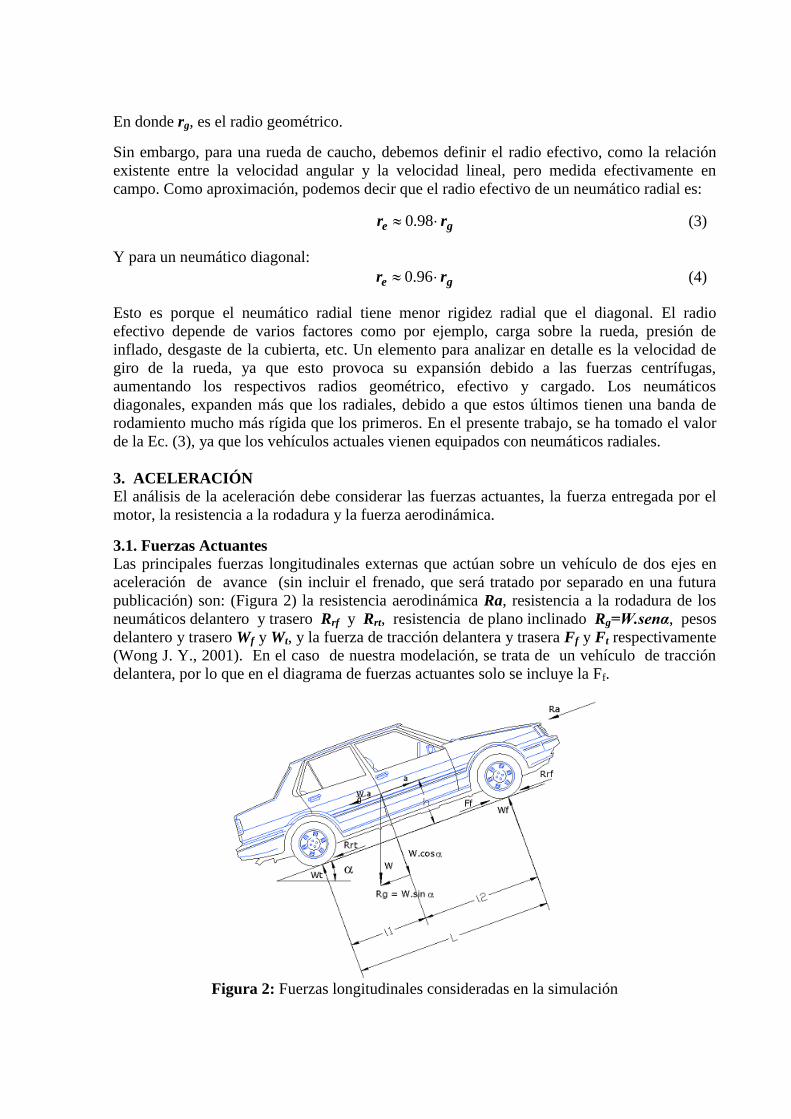
Las principales fuerzas longitudinales externas que actúan sobre un vehículo de dos ejes en
aceleración de avance (sin incluir el frenado, que será tratado por separado en una futura
publicación) son: (Figura 2) la resistencia aerodinámica Ra, resistencia a la rodadura de los
neumáticos delantero y trasero Rrf y Rrt, resistencia de plano inclinado Rg=W.senα, pesos
delantero y trasero Wf y Wt, y la fuerza de tracción delantera y trasera Ff y Ft respectivamente
(Wong J. Y., 2001). En el caso de nuestra modelación, se trata de un vehículo de tracción
delantera, por lo que en el diagrama de fuerzas actuantes solo se incluye la Ff.
Figura 2: Fuerzas longitudinales consideradas en la simulación
La ecuación de movimiento a lo largo del eje longitudinal para el vehículo de tracción
delantera considerado, estará dada por la segunda ley de Newton como la suma algebraica del
conjunto de fuerzas planteadas, expresada en forma de ecuación diferencial:
grtrfaf RRRRFtxag
WtxF
dt
txdm ))((())((
)(2
2
(5)
En esta ecuación W representa el peso total del vehículo y g la aceleración debido a la
gravedad. Reordenando los términos de la Ec. (5) e introduciendo el concepto de fuerza de
inercia, podemos definir la fuerza de tracción necesaria para movilizar el vehículo bajo las
condiciones dispuestas:
ag
WRRRa
g
WRRRRF gragrtrfaf (6)
Rr es la fuerza de resistencia a la rodadura en el vehículo completo.
La máxima aceleración que un vehículo puede alcanzar está limitada por dos factores
principales, el torque que es aplicado en las ruedas y que depende de la potencia entregada por
el motor y las relaciones de transmisión en su máximo rendimiento, y la interacción de los
neumáticos con la carpeta de rodamiento, que depende de las condiciones del caucho con que
están fabricadas las cubiertas y de la condición del camino por el cual circulan.
Para estimar la fuerza de tracción máxima entre el neumático y el camino se deben determinar
las cargas normales en cada eje del vehículo. Esto se puede calcular realizando la sumatoria
de los momentos con respecto a los puntos de contacto de las ruedas delantera y trasera
respectivamente con el suelo, tomando en cuenta que, a los efectos de esta simulación, se
puede simplificar y asumir que la fuerza aerodinámica Ra, está aplicada en el centro de
gravedad del vehículo, y no en el centro de presión, ya que ambos se encuentran en un
entorno muy cercano, Wong J. Y. (2001). Obtenemos los pesos sobre los ejes
correspondientes:
gat Ra
g
WR
L
h
L
lWW 2cos
(7)
gaf Ra
g
WR
L
h
L
lWW 1cos
(8)
La fuerza de tracción límite para un vehículo de tracción delantera antes de producir derrape
en aceleración es la siguiente:
rfff RFt
L
hW
L
lWFt max
1max cos (9)
En donde la fuerza de Resistencia a la rodadura es:
)(cos vfWR rr (10)
Finalmente reemplazando Ec. (10) en Ec. (9), tenemos:

L
hL
hvflW
Ft
r
f
1
))((cos 1
max (11)
Donde fr(v) es el coeficiente de resistencia a la rodadura, h es la altura del centro de gravedad,
L la distancia entre ejes, l1 la distancia entre el centro de gravedad y la rueda trasera, W el
peso total del vehículo, coeficiente de adherencia y la pendiente de la superficie de
rodamiento. La ecuación de aceleración derivada de esta fuerza es:
r
graf
MM
RRRFttxaLim
max))((( (12)
En donde M es la masa del vehículo, y Mr la masa equivalente, que será explicada más
adelante en este artículo. Los valores promedio del coeficiente de adherencia longitudinal son
presentados en Tabla 1.
Tabla 1: Valores del coeficiente de fricción longitudinal
3.2. Fuerza Entregada Por El Motor
Las fuerza tractora que estará disponible en la interface rueda – camino es:
dttd
ef
rddtdcmef
tddtmf
NNN
r
aININII
r
NNTF
2
22
(13)
Donde Tm es el torque del motor, Nt la relación de caja de cambios, Nd la relación del
diferencial, Ii las inercias rotacionales de los componentes, a la aceleración. El factor td
indica un rango de eficiencia de alrededor del 90%, Gillespie T. (1992), por pérdidas
mecánicas y viscosas en los componentes del tren de transmisión.
La expresión de la fuerza tractora está compuesta por dos términos. El primero se refiere a la
amplificación del torque generado en el motor por efecto de la relación de engranajes de la
caja de cambios y el diferencial, afectado por el factor de eficiencia explicado, dividido por el

radio efectivo de la rueda. El segundo representa la pérdida de fuerza tractora debido a las
inercias rotacionales del motor y la transmisión, teniendo en cuenta la magnificación de las
inercias por el cuadrado de la relación de transmisión.
A los efectos de la modelación, las inercias rotacionales de la Ec. (13) son reemplazadas por
una masa equivalente de los componentes rotacionales Mr, que se suma a la masa del vehículo
en la ecuación general de la aceleración Ec. (5), quedando:
graef
tddtmrr RRR
r
NNTtxa
g
WWtxaMM
))((())((( (14)
rMM se denomina masa efectiva, y la relación:
2
00250041 tdr N
M
MM
.. (15)
Factor de masa (Gillespie T., 1992) y (Wong J. Y., 2001).
La ecuación de aceleración final que deriva de la fuerza entregada por el motor será:
r
grae
tddtm
MM
RRRr
NNT
txaEng
))((( (16)
3.3. Resistencia a La Rodadura
Cuando un neumático gira, la carcasa es deformada en el área de contacto con el suelo. Como
resultado de esta distorsión, la presión normal en la mitad delantera de la huella es mayor que
en la mitad trasera, esto provoca que la resultante de las fuerzas que llegan a la rueda, que
originalmente se encontraba aplicada sobre el centro de giro, se desplace en la dirección del
rodamiento, y genere una resistencia al giro, que es llamada fuerza de resistencia a la
rodadura, Di Rado et al. (2008).
Existen diversas ecuaciones empíricas que modelan matemáticamente este coeficiente, y que
pueden ser aplicadas a los efectos de la simulación computacional. En este trabajo se ha
utilizado la presentada por Jazar R. (2008), que posee un rango de acción amplia para
diferentes tipos de superficies de rodamiento, y hasta una velocidad de aproximadamente 150
km/h.
21 vfr o (17)
En donde o tiene un valor variable según el tipo de terreno, y 1 un valor de 7.10-6
s2/m
2, y la
velocidad está expresada en m/s. Los valores de o son presentados en la Tabla 2, para
distintas superficies de rodamiento, esto hace muy conveniente la utilización del modelo en
simuladores todo terreno.

Tabla 2: Valor de o para diferentes superficies
Finalmente la fuerza de resistencia a la rodadura se obtiene por la Ec. (10)
3.4. Fuerza Aerodinámica
Las fuerzas aerodinámicas producidas en el vehículo se originan de dos fuentes: flujo sobre el
exterior del vehículo y flujo a través del interior para propósitos de refrigeración, calefacción
y ventilación. El flujo exterior, que es el más importante, se divide a su vez en presión normal
o presión de arrastre, y tensión de corte o fuerza viscosa en la capa límite adyacente a la
superficie exterior del vehículo.
Un análisis completo acerca de este fenómeno puede ser estudiado en Di Rado et. al. (2009).
Por la complejidad que representa el flujo de aire sobre un cuerpo, es necesario desarrollar
modelos semi-empíricos que representen y caractericen el fenómeno, es así, que para el
cálculo de la resistencia aerodinámica y a los efectos de la simulación, se utilizó la siguiente
ecuación, Landau L. D. et. al. (1987).
2
2
1vACdRa (18)
En donde es la densidad del aire, Cd es el coeficiente de penetración que depende de la
forma del cuerpo y es determinado experimentalmente en túneles de viento, A es el área
transversal de exposición al flujo de aire, y v la velocidad del cuerpo relativa a la velocidad
del aire. Vemos que en esta ecuación está involucrada la presión dinámica vista en la ecuación
de Bernoulli. La densidad del aire se puede calcular con las leyes del gas ideal como:
TR
p
(19)
En donde p es la presión atmosférica (kpa), R (286.9 J/kg ºK) es la constante individual del
gas relacionada con el peso molecular y T la temperatura (ºK).
El valor del área de incidencia frontal se calcula también a través de una formula empírica que
se utiliza para vehículos con una masa de entre 800 y 2000 kg, Wong J. Y. (2001):
)(.. 76500056061 mvA (20)

En donde A es el área en m2 y mv es la masa del vehículo en kg.
Otra manera de estimar el área transversal, es aplicando el método fotográfico, y digitalizando
el perfil en un sistema de diseño asistido por computadora Di Rado et. al. (2009).
4. DISCUCIÓN DE RESULTADOS
El modelo acoplado de simulación se realizó utilizando como parámetro un automóvil
estándar de fabricación nacional Renault Clío 1.2L 16v con las siguientes características:
cilindrada 1149 cm3, Potencia máxima 75 cv a 5500 rpm, peso en orden de marcha 930 kg,
peso delantero 565 kg, peso trasero 365 kg, distancia entre ejes 2.47 m, neumáticos 175/65 r
14, diámetro de rueda 1.94 pies, coeficiente de penetración (Cd) 0.38, velocidad máxima de
aproximadamente 161 km/h, aceleración de 0 a 100 km/h 12.9 segs, aceleración de 0 a 1000
metros 34.7 segs. Datos obtenidos de manuales de usuario y de la fuente:
http://www.renault.com.ar/automoviles. La validación de este modelo de vehículo fue
demostrada en el trabajo Di Rado et al (2011) sobre asfalto seco únicamente.
Teniendo en cuenta las Ecs. (12) y (16), el simulador cuenta con un algoritmo de control de
tracción en la partida desde velocidad cero, esto es, cuantifica el valor de la fuerza entregada
por la potencia del motor, y verifica que no sea superior a la que corresponde a la máxima
adherencia, en cuyo caso, toma esta última fuerza para efectivizar el avance. En esta
oportunidad, se realizaron pruebas de aceleración sobre diferentes superficies de rodamiento,
y se construyeron diagramas velocidad – tiempo, velocidad – espacio y aceleración - tiempo.
Para lograr una representación fehaciente del entorno en que se realiza la prueba en tiempo
real, es necesario modelar el escenario con los diferentes elementos de los cuales se compone.
En este trabajo se han generado tramos de carreteras rectos de 6 km de longitud, simulando
asfalto seco y húmedo (Figura 3), terraplén de tierra compactada y terraplén de tierra suelta
(Figura 4), con el fin de representar una amplia gama de interacción neumático – carretera, y
de performance de conducción.
Los coeficientes de adherencia utilizados fueron extraídos de la Tabla 1 y los coeficientes de
resistencia a la rodadura de la Tabla 2. Por utilizarse el mismo vehículo para todas las
pruebas, los parámetros de resistencia aerodinámica y parámetros geométricos intrínsecos son
los mismos.
Figura 3: Tramo de pista de asfalto
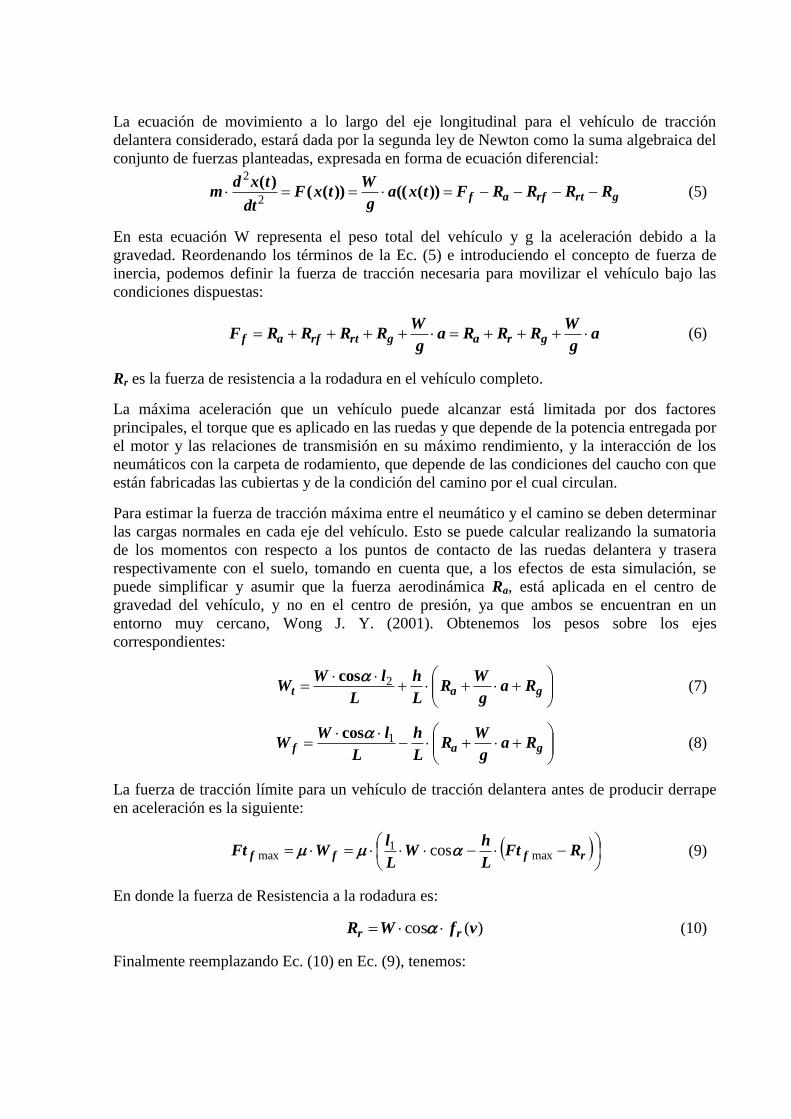
El procedimiento consistió en acelerar sostenidamente el vehículo en terreno llano (pendiente
cero), desde el reposo, y hasta la velocidad máxima permitida por sus características técnicas
y por la superficie de rodamiento, que en el caso del asfalto húmedo y seco fue de ~161 kph
(verificado con el manual del usuario), en superficie de tierra compactada de ~148 kph, y en
superficie de tierra suelta de ~124 kph, con una gran incidencia de la fuerza de resistencia a la
rodadura.
Figura 4: Tramo de pista de tierra
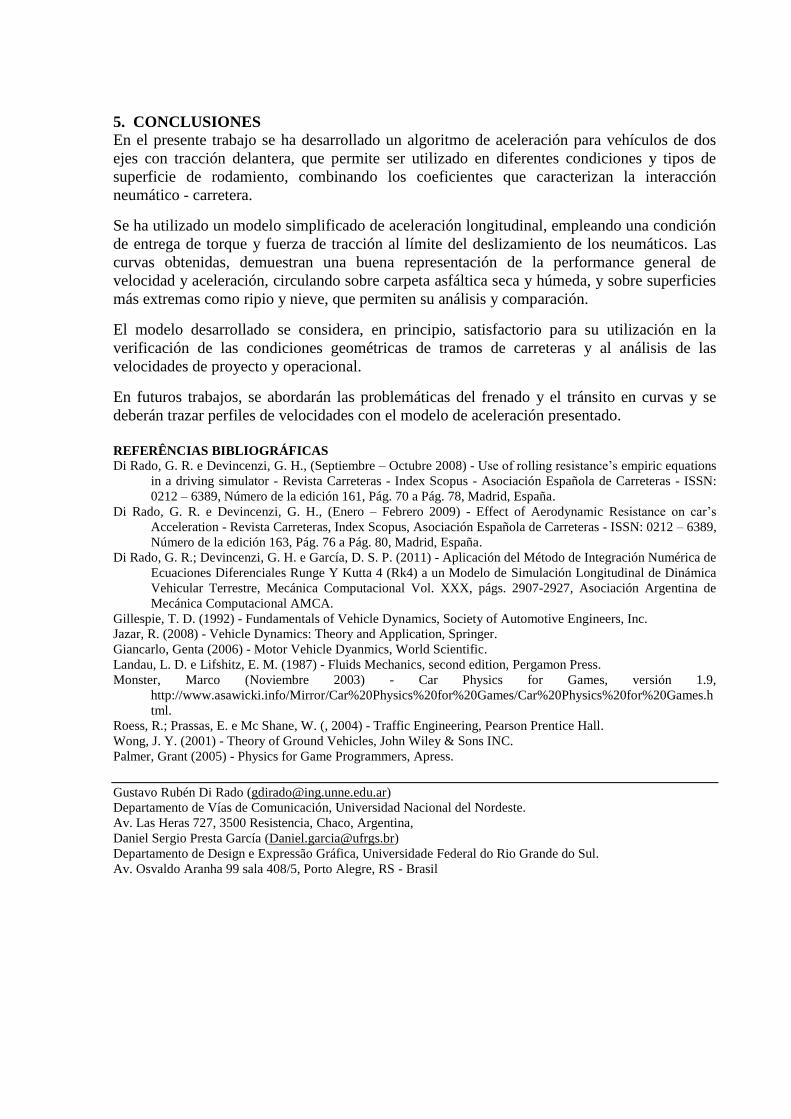
Los gráficos presentados en figuras 5 y 6, muestran en ordenadas la velocidad y la aceleración
respectivamente, y en abscisas el tiempo transcurrido durante la prueba en segundos. Todos
los datos fueron obtenidos en tiempo real durante el proceso de conducción del vehículo
virtual. El coeficiente de resistencia a la rodadura adoptado para la circulación sobre asfalto
fue de 0 = 0.018, que corresponde a un promedio para esta superficie. En el caso de tierra
compactada 0 = 0.045 y en tierra suelta 0 = 0.08.
La curva a), representa la aceleración sobre una superficie de asfalto seco (. Es la
que mayor pendiente presenta, y la que menos tiempo utiliza para acceder a la máxima
velocidad de 161 kph (~ 65 seg.) (Figura 5). Esto es un indicativo de la mayor capacidad de
tracción con respecto de los demás terrenos, que se pone de manifiesto al observar la Figura 6,
en donde en 1ª marcha, aún cuando se ve limitada por el coeficiente de adherencia, se llega a
una aceleración de casi 9 pies/seg2. En 2ª marcha, la fuerza de tracción cedida por la potencia
del motor se torna menor que la fuerza límite, y de ahí en adelante controla la prueba, con
aceleraciones que en 5ª velocidad son cercanas a cero, y el vehículo no puede aumentar su
velocidad en terreno llano.
La curva b), representa la circulación sobre asfalto húmedo (, sin película de agua,
esto es, sin posibilidad de hidroplaneo dinámico. Podemos observar que también accede a la
máxima velocidad de 161 kph, pero en un tiempo mayor, con una diferencia que en 2ª, 3ª y 4ª
marcha se incrementa de 2 a 4 seg., con una pendiente sensiblemente menor, con menor
capacidad de tracción (Figura 5). En (Figura 6), vemos que en este caso, la máxima
aceleración en 1ª marcha, controlada por la adherencia, es de ~5.3 pies/seg2, y en 2ª marcha,
también controlada por la adherencia, se produce un salto positivo a ~6.6 pies/seg2, esto es
porque la fuerza de tracción límite es constante, y ahora la masa equivalente de la Ec. (29),
que deriva del factor de masa de la Ec. (28), es menor, porque las pérdidas de la relación de
transmisión Ntd son menores. En 3ª marcha la potencia entregada por el motor es la que regula
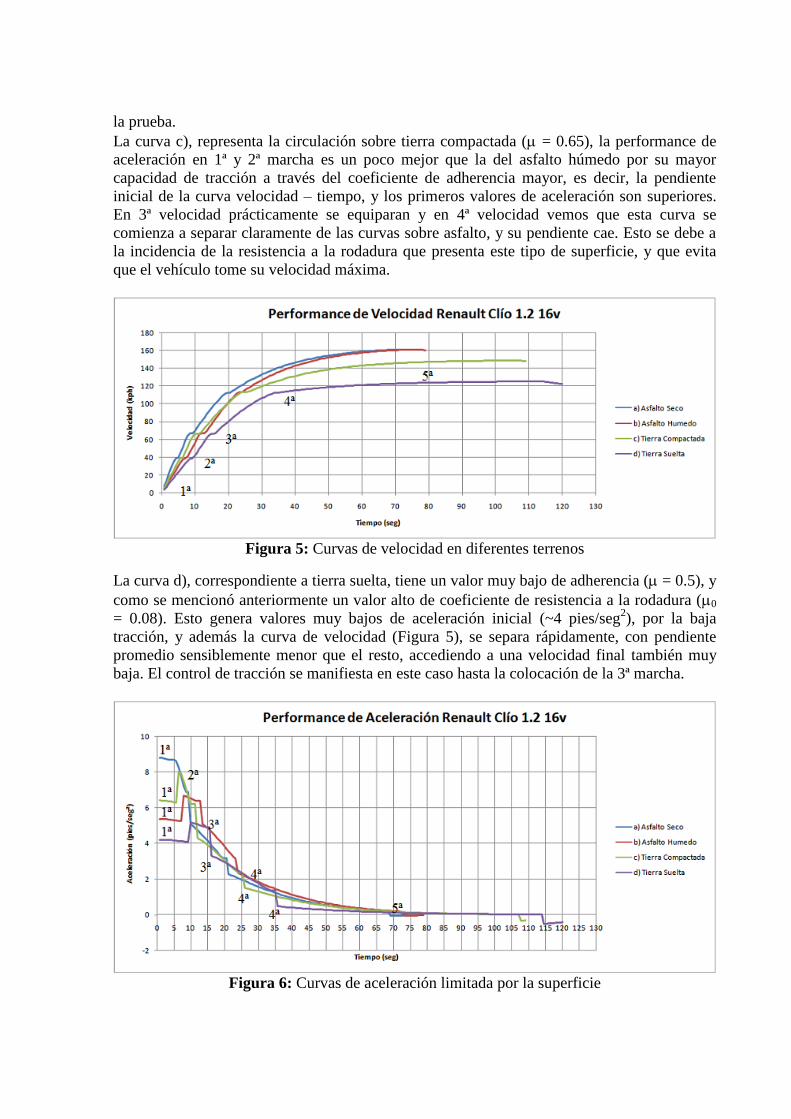
la prueba.
La curva c), representa la circulación sobre tierra compactada ( = 0.65), la performance de
aceleración en 1ª y 2ª marcha es un poco mejor que la del asfalto húmedo por su mayor
capacidad de tracción a través del coeficiente de adherencia mayor, es decir, la pendiente
inicial de la curva velocidad – tiempo, y los primeros valores de aceleración son superiores.
En 3ª velocidad prácticamente se equiparan y en 4ª velocidad vemos que esta curva se
comienza a separar claramente de las curvas sobre asfalto, y su pendiente cae. Esto se debe a
la incidencia de la resistencia a la rodadura que presenta este tipo de superficie, y que evita
que el vehículo tome su velocidad máxima.
Figura 5: Curvas de velocidad en diferentes terrenos
La curva d), correspondiente a tierra suelta, tiene un valor muy bajo de adherencia ( = 0.5), y
como se mencionó anteriormente un valor alto de coeficiente de resistencia a la rodadura (0
= 0.08). Esto genera valores muy bajos de aceleración inicial (~4 pies/seg2), por la baja
tracción, y además la curva de velocidad (Figura 5), se separa rápidamente, con pendiente
promedio sensiblemente menor que el resto, accediendo a una velocidad final también muy
baja. El control de tracción se manifiesta en este caso hasta la colocación de la 3ª marcha.
Figura 6: Curvas de aceleración limitada por la superficie
5. CONCLUSIONES
En el presente trabajo se ha desarrollado un algoritmo de aceleración para vehículos de dos
ejes con tracción delantera, que permite ser utilizado en diferentes condiciones y tipos de
superficie de rodamiento, combinando los coeficientes que caracterizan la interacción
neumático - carretera.
Se ha utilizado un modelo simplificado de aceleración longitudinal, empleando una condición
de entrega de torque y fuerza de tracción al límite del deslizamiento de los neumáticos. Las
curvas obtenidas, demuestran una buena representación de la performance general de
velocidad y aceleración, circulando sobre carpeta asfáltica seca y húmeda, y sobre superficies
más extremas como ripio y nieve, que permiten su análisis y comparación.
El modelo desarrollado se considera, en principio, satisfactorio para su utilización en la
verificación de las condiciones geométricas de tramos de carreteras y al análisis de las
velocidades de proyecto y operacional.
En futuros trabajos, se abordarán las problemáticas del frenado y el tránsito en curvas y se
deberán trazar perfiles de velocidades con el modelo de aceleración presentado.
REFERÊNCIAS BIBLIOGRÁFICAS
Di Rado, G. R. e Devincenzi, G. H., (Septiembre – Octubre 2008) - Use of rolling resistance’s empiric equations
in a driving simulator - Revista Carreteras - Index Scopus - Asociación Española de Carreteras - ISSN:
0212 – 6389, Número de la edición 161, Pág. 70 a Pág. 78, Madrid, España.
Di Rado, G. R. e Devincenzi, G. H., (Enero – Febrero 2009) - Effect of Aerodynamic Resistance on car’s
Acceleration - Revista Carreteras, Index Scopus, Asociación Española de Carreteras - ISSN: 0212 – 6389,
Número de la edición 163, Pág. 76 a Pág. 80, Madrid, España.
Di Rado, G. R.; Devincenzi, G. H. e García, D. S. P. (2011) - Aplicación del Método de Integración Numérica de
Ecuaciones Diferenciales Runge Y Kutta 4 (Rk4) a un Modelo de Simulación Longitudinal de Dinámica
Vehicular Terrestre, Mecánica Computacional Vol. XXX, págs. 2907-2927, Asociación Argentina de
Mecánica Computacional AMCA.
Gillespie, T. D. (1992) - Fundamentals of Vehicle Dynamics, Society of Automotive Engineers, Inc.
Jazar, R. (2008) - Vehicle Dynamics: Theory and Application, Springer.
Giancarlo, Genta (2006) - Motor Vehicle Dyanmics, World Scientific.
Landau, L. D. e Lifshitz, E. M. (1987) - Fluids Mechanics, second edition, Pergamon Press.
Monster, Marco (Noviembre 2003) - Car Physics for Games, versión 1.9,
http://www.asawicki.info/Mirror/Car%20Physics%20for%20Games/Car%20Physics%20for%20Games.h
tml.
Roess, R.; Prassas, E. e Mc Shane, W. (, 2004) - Traffic Engineering, Pearson Prentice Hall.
Wong, J. Y. (2001) - Theory of Ground Vehicles, John Wiley & Sons INC.
Palmer, Grant (2005) - Physics for Game Programmers, Apress.
Gustavo Rubén Di Rado ([email protected])
Departamento de Vías de Comunicación, Universidad Nacional del Nordeste.
Av. Las Heras 727, 3500 Resistencia, Chaco, Argentina,
Daniel Sergio Presta García ([email protected])
Departamento de Design e Expressão Gráfica, Universidade Federal do Rio Grande do Sul.
Av. Osvaldo Aranha 99 sala 408/5, Porto Alegre, RS - Brasil