models for automotive embedded systems development
TRANSCRIPT

Models for Automotive Embedded Systems Development
Henrik Lönn, Technology Specialist, Embedded Software Development, AB Volvo.
TDA594 / DIT594 Software Engineering Principles for Complex Systems

Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development
Volvo Group Business Areas
V O LV O T R U C K S
U D T R U C K S & J V s
R E N AU LT T R U C K S
VOLVO AUTONOMOUS SOLUTIONS
AR Q U U S
V O LV O P E N TA
B U S E S C O N S T R U C T I O N E Q U I P M E N T
M AC KT R U C K S
V O LV O F I N AN C I AL S E R V I C E S

Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development
Our organization
BUSINESS
AREAS
TRUCK
DIVISIONS
GROUP
FUNCTIONS
Volvo Group CEO
& Group Executive Board
Mack
TrucksUD Trucks
Volvo
Trucks
Volvo
CE
Volvo
Buses
Volvo
Penta
Volvo
Financial
Services
ArquusRenault
Trucks
Group Trucks Technology
Group Trucks Operations
Group Trucks Purchasing
Volvo
Autonomous
Solutions
Group Functions
North America
17.845
Europe
49.694Asia
16.888
South America
5.228
Africa & Oceania
2.474

Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development
Innovative technology offerings
FOR OUR CUSTOMERS AND THE SOCIETY
A U T O M A T E D M A N U A L
T R A N S M I S S I O N
V O L V O D Y N A M I C
S T E E R I N G ( V D S )
R E N A U L T I N F O M A X W A V E P I S T O N F O R
B E T T E R E F F I C I E N C Y
M A C K ® G U A R D D O G ®
C O N N E C T
COLLIS ION WARNING WITH
EMERGENCY BRAKE
PREDICT IVE CRUISE
CONTROL ( I -SEE)
A U T O M A T I C T R A C T I O N
C O N T R O L
PEDESTRIAN AND CYCLIST
DETECTION SYSTEM
R E M O T E P R O G R A M M I N G
O V E R - T H E - A I R ( O T A )
Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development
Concepts and technologies for the future
ACCELERATING THE TRANSITION TO A SUSTAINABLE FUTURE
A U T O N O M O U S R E F U S E
T R U C K F O R U R B A N
E N V I R O N M E N T
V O L V O V E R AA U T O N O M O U S T R U C K
F O R M I N I N G
E L E C T R I C R O A D
S Y S T E M S
A N D M A N Y M O R EP L A T O O N I N GW I R E L E S S S E N S O R S T O
R E P L A C E C A B L E S
3 D P R I N T I N G F O R
L I G H T E R E N G I N E S
F U L L Y E L E C TR I C
C O N S TR U C TI O N E Q U I P M E N T
W I TH AU TO M ATI O N
V O L V O C O N C E P T
T R U C K

Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development
Take Home Messages:
• Appropriate Software Architecture is Instrumental
• Software Architecture Competence is
Critical for Swedish Industry
• Modeling is an Enabling Technology for
Continuous Integration of Complex Products

Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development
Reduced Lead Times
Continuous Deployment
Continuous Integration
Quality
Reuse
Multiple cycle times
Multiple Aspects
Multiple Domains
Multiple Teams
Automation
Connectivity
Electrification
Control Strategies
Architecture
(re)volution

Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Get Things Right - Continuously
Lönn: Models for Automotive Embedded Systems Development
FinalizationConception
$
Product Cost Flexibility
FinalizationConception
Design
Space
Size
Mechanical vs. Software
Design Flexibility
FinalizationConception
Cumulative Resources –
Continuous Deployment
Hours
FinalizationConception
Cumulative Resources
Hours

Volvo Group Trucks Technology
Example: Testing
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Example: Road and Track Testing
When Simulation is too difficult
When Simulation is Impossible
Because it is “Free”
Lönn: Models for Automotive Embedded Systems Development
Volvo Group Trucks Technology
Example: Analysis and Simulation Based “Testing”
To exercise rare situations
To exercise dangerous situations
To accelerate time
To accelerate coverage
To be repeatable
To allow debugging
To cover large sets of configurations
To cover fictuous configurations
Lönn: Models for Automotive Embedded Systems Development
Volvo Group Trucks Technology
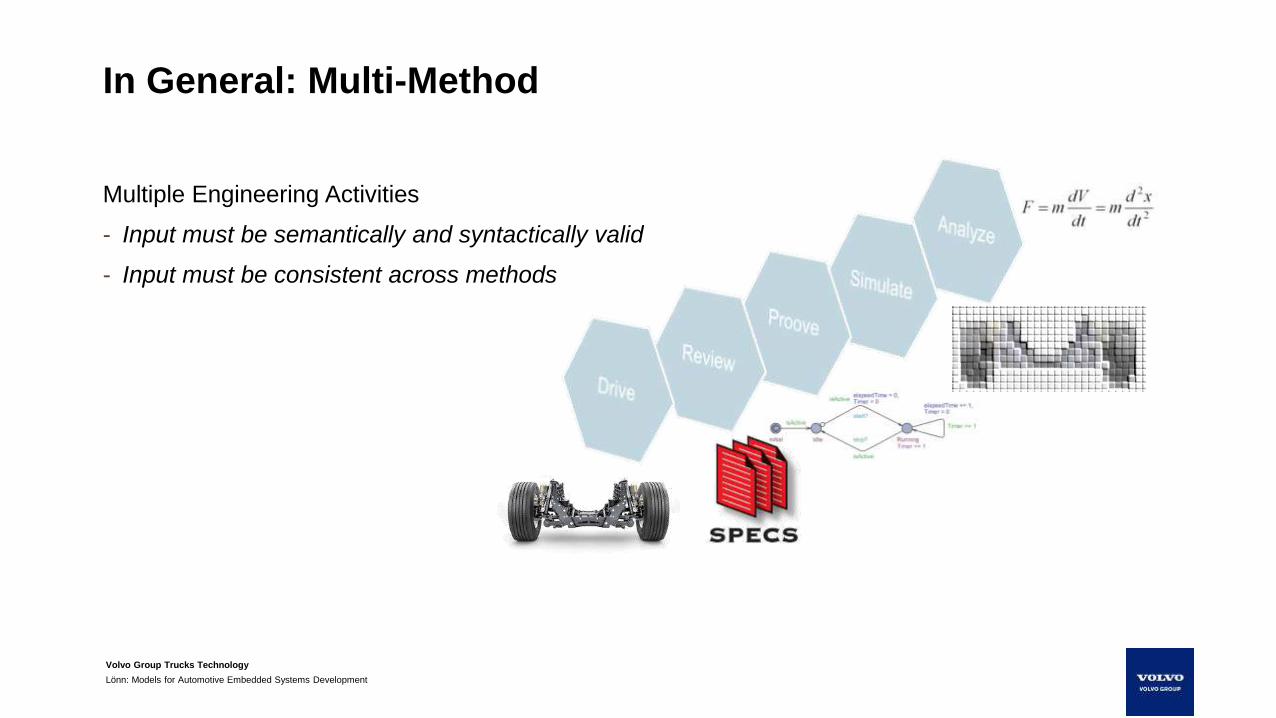
In General: Multi-Method
Multiple Engineering Activities
- Input must be semantically and syntactically valid
- Input must be consistent across methods
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Consistency and Accuracy
Models are a representation of the real truck
Data from factory, track, field is required to secure validity
Models allow engineering rigor and engineering automation
Lönn: Models for Automotive Embedded Systems Development
Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development
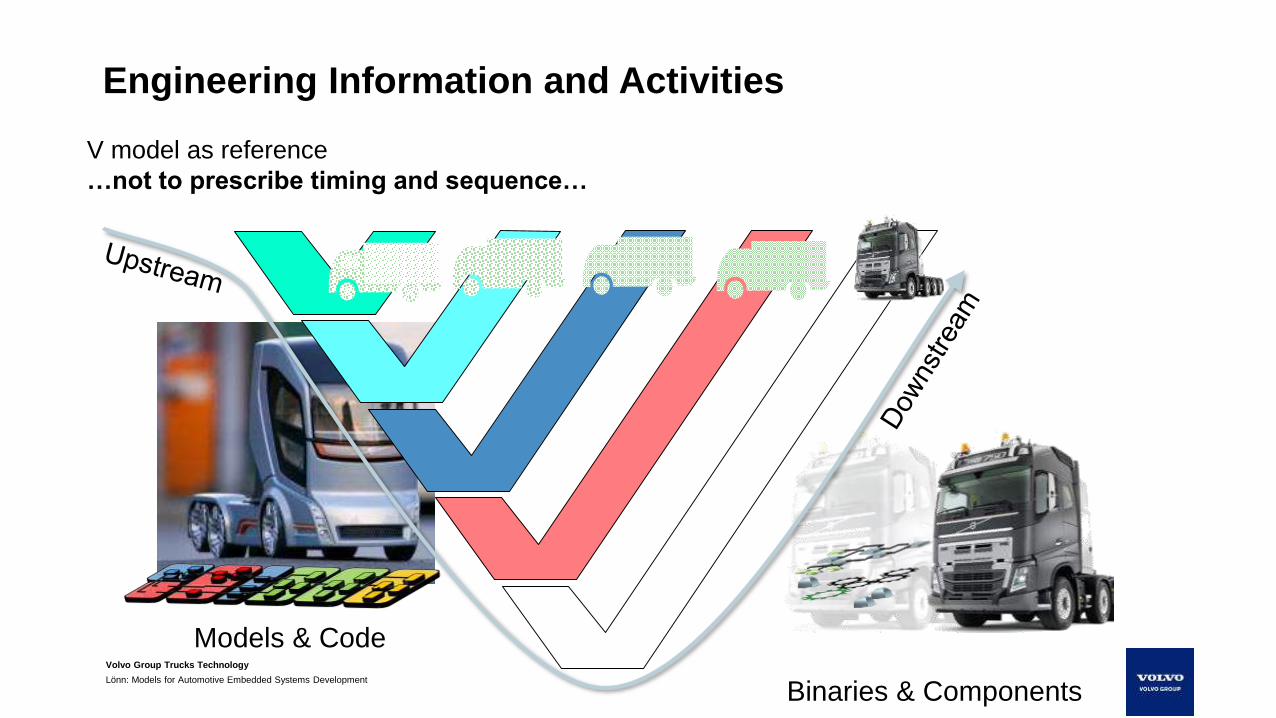
Engineering Information and Activities
Models & Code
Binaries & Components
V model as reference
…not to prescribe timing and sequence…

Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development
V model vs. Continuous Integration and Delivery
...
Every j:th iterationEvery i:th iteration Every k:th iteration
Daily/Weekly/...Hourly Weekly
......
Component
Z
Component
X
TestY

Volvo Group Trucks Technology
Collaborate Efficiently
Product complexity call for advanced models and tools
Modelling is a significant Effort
Vehicle Manufacturer must integrate models
Lönn: Models for Automotive Embedded Systems Development
Black/White/Grey-box
Clear Interfaces
Structure and Behavior

Volvo Group Trucks Technology
Control over Engineering Information
Engineering documentation is a core asset
Increased use of models represents risk
– Vendor Lock-in
– Complex Information
– Complex access to information
Vehicle Manufacturer must have control of their models
Lönn: Models for Automotive Embedded Systems Development
Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Vehicle Content
Solution independent description of vehicle
”Features” to decompose content
Lönn: Models for Automotive Embedded Systems Development
Climate Control
Speed Keeping
External Lights
Entertainment
Entertainment
Height Control
Steering

Volvo Group Trucks Technology
Application Software Architecture - Layering
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Application Software Architecture - Layering
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Virtual Engineering
...to allow
Instant Deliveries
Maximize Verification Confidence
Exercise Dangerous and Rare Events
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Virtual Integration and Simulation
Simulation requires models of all relevant functional aspects
– (Software)
– Software platform
– Electronics
– Mechatronics
– Physics
– Environment
Lönn: Models for Automotive Embedded Systems Development
Volvo Group Trucks Technology
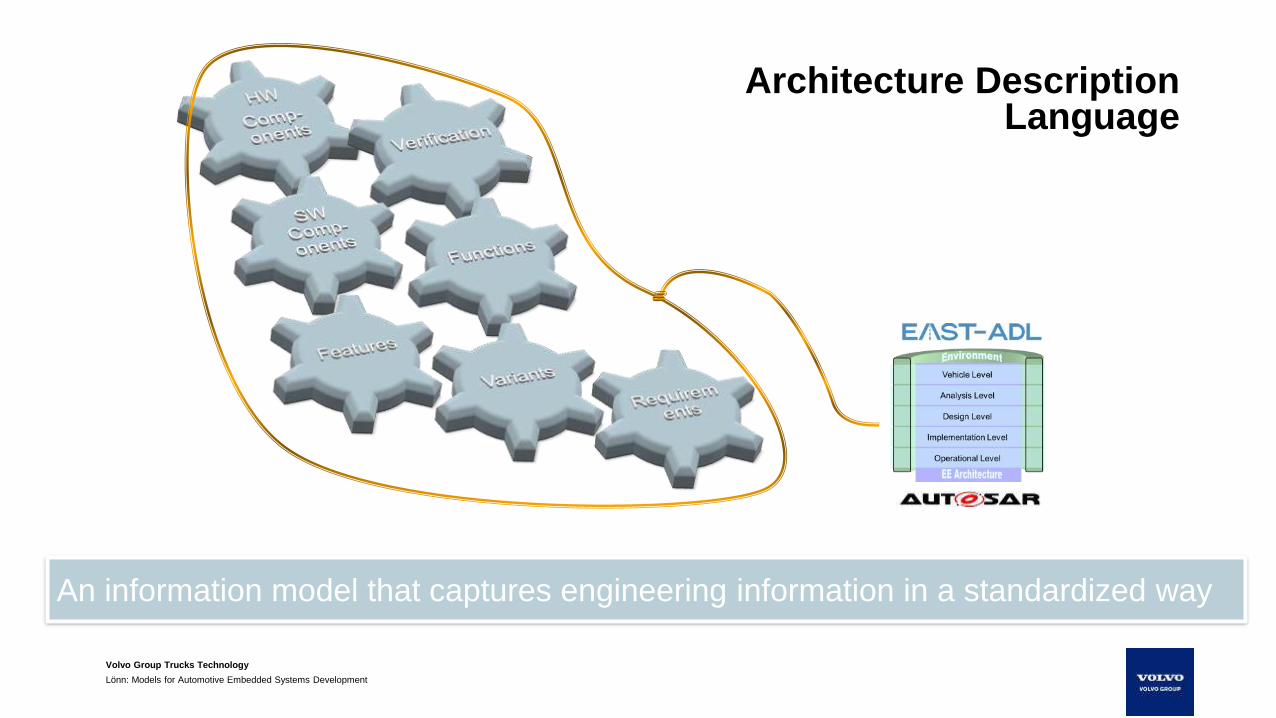
An information model that captures engineering information in a standardized way
Architecture Description Language
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Modelling & Simulation Technology
Lönn: Models for Automotive Embedded Systems Development
Models -MIL
Software - SIL
Hardware - HIL
Prototyping - RCP
Controller
(SW & Electronics)Devices Plant
(Mechanics, etc.) Environment

Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Modelling Pattern to Support Integration
Lönn: Models for Automotive Embedded Systems Development
Model-in-the-loop: Controller model interfaces to models of sensors and actuators
Software-in-the-loop: Software interfaces to models of electronics
Hardware-in-the-loop: ECU interfaces to models of sensors and actuators
Hardware+-in-the-loop: Sensor & actuator interfaces to models of plant

Volvo Group Trucks Technology
Model Structure
Lönn: Models for Automotive Embedded Systems Development
Electrical
(Logical)Engineering
Units
Electrical
(Physical)
Electrical
(Bit pattern)
En
viro
nm
ent
Pla
nt
Actu
ato
r
I/O
BS
W
Se
nso
r/act.
SW
C
Ap
plic
atio
n
La
ye
r I
Ap
plic
atio
n
La
ye
r II
Engineering
Units

Volvo Group Trucks Technology
Feature Models
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Functional & Software Architecture
Lönn: Models for Automotive Embedded Systems Development
Volvo Group Trucks Technology
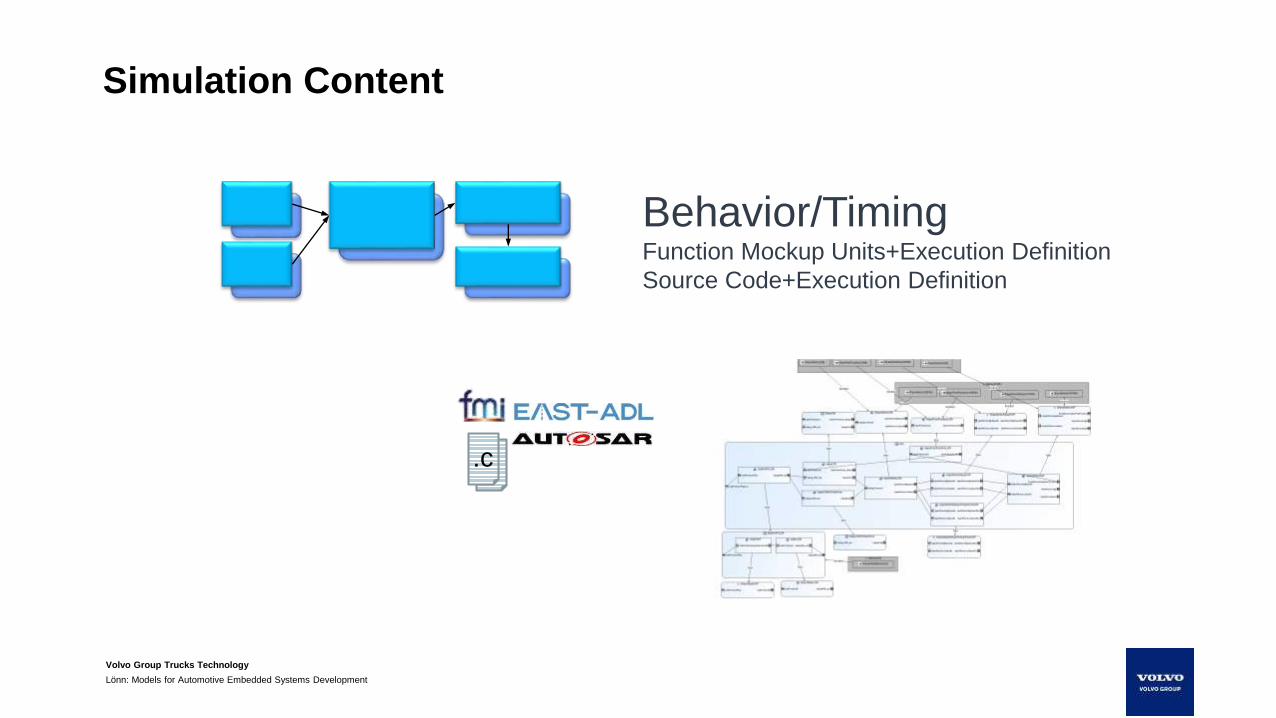
Simulation Content
Lönn: Models for Automotive Embedded Systems Development
Behavior/TimingFunction Mockup Units+Execution Definition
Source Code+Execution Definition
.c

Volvo Group Trucks Technology
Property Annotations
Lönn: Models for Automotive Embedded Systems Development
V&V
Requirement
60 ms
Test
Timing
Dependability
Error Propagation Model
$
Cost
Variability
§
Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Electronic Control Unit
AUTOSAR - Technical Goals
Increased Flexibility
– Modularity
– Scalability
– Transferability
– Re-usability
Standardized platform
– Off-the-shelf purchase & integration of comm, OS, diagnosis, drivers, etc.
– Off-the-shelf hardware
Standardized Interfaces
– Off-the-shelf purchase & integration of common vehicle functions
Lönn: Models for Automotive Embedded Systems Development
Electronic Control Unit
Software Platform
Application 2
Application 1
Application 2
Application 1
Software Platform
Software Platform
Volvo Group Trucks Technology
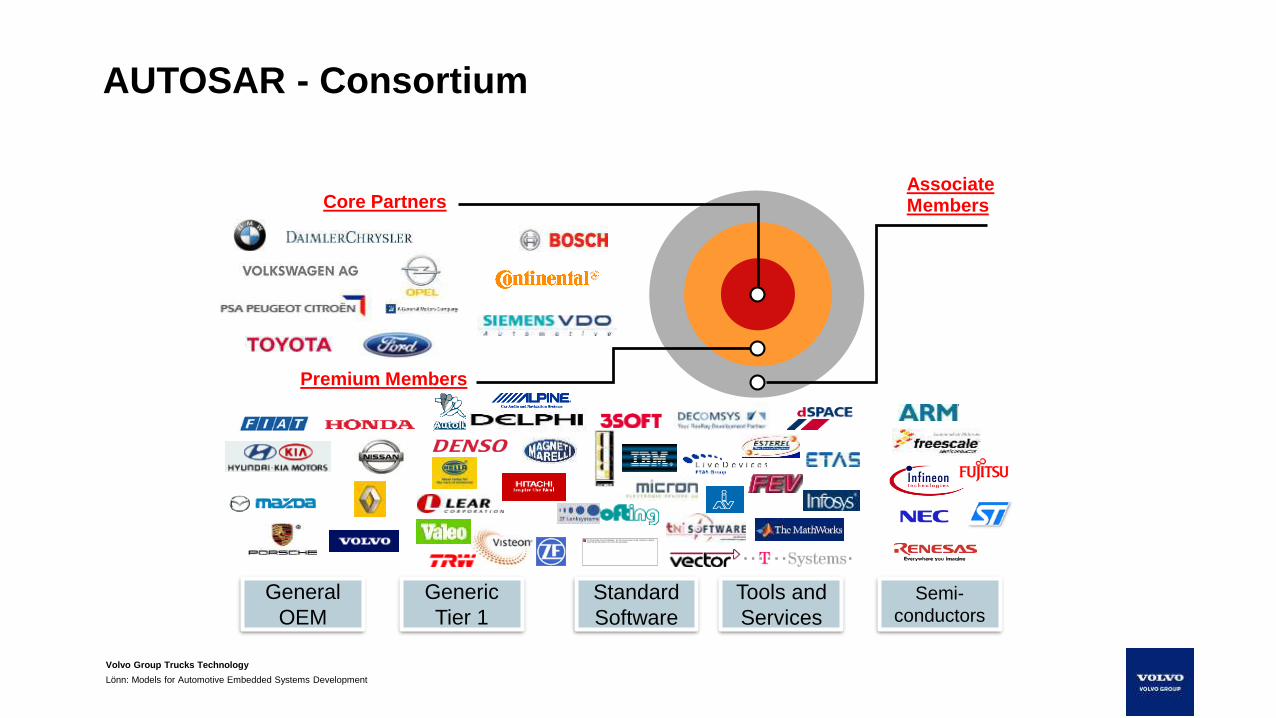
AUTOSAR - Consortium
Core Partners
General
OEM
Generic
Tier 1
Standard
Software
Tools and
Services
Semi-
conductors
AssociateMembers
Premium Members
Lönn: Models for Automotive Embedded Systems Development
Volvo Group Trucks Technology
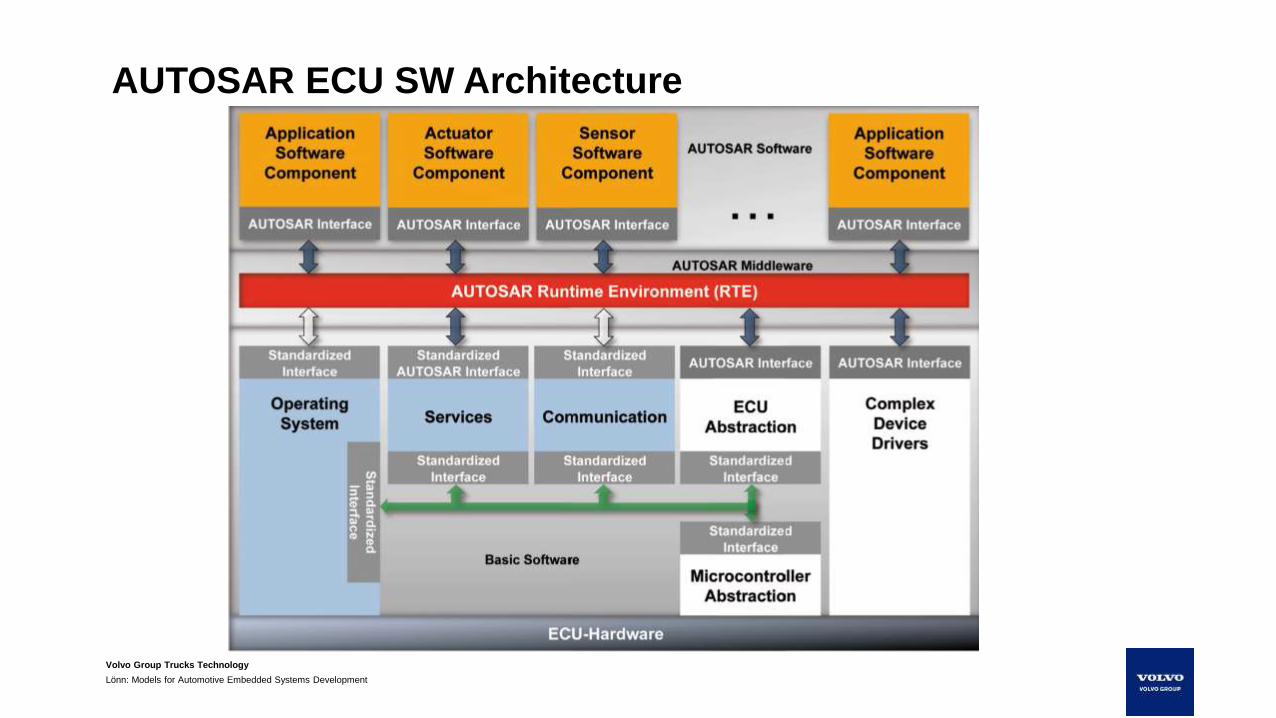
AUTOSAR ECU SW Architecture
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
AUTOSAR - Elements
Modelling
– Capture SW Components SW Component Template
– Capture ECU resources: ECU Resource Description
– Capture allocation and communication: System Description
Methodology
– Autogenerate ECU configuration
– Autogenerate platform SW configuration
– Autogenerate glue code (RTE)
Application Interfaces
– Standard interface definitions for well-established functions
Architecture
– Standard platform SW
– Standard interfaces
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
AUTOSAR Software: Software Components
Hardware independent (CPU and peripherals of ECU)
Location independent (Communication technology, platform services)
Specified by
– Interface
– Resource Requirements
– Implementation constraints
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
AUTOSAR Software: Sensors and Actuators
SensorActuatorSoftwareComponent adapts device interface to application
functions
Software architecture
to separate ECU and
device specific parts
Support for re- allocation
of sensors and actuators
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
AUTOSAR Basic Software
Software platform for application SW components
Standardized Components
– System services (diagnostic protocols; NVRAM, flash and memory management)
– Communication (CAN/LIN/FlexRay... framework, I/O management, Network management)
– Operating System (OSEK based)
– Microcontroller Abstraction
ECU Specific Components
– ECU Abstraction
– Complex Device Driver
Lönn: Models for Automotive Embedded Systems Development
Volvo Group Trucks Technology
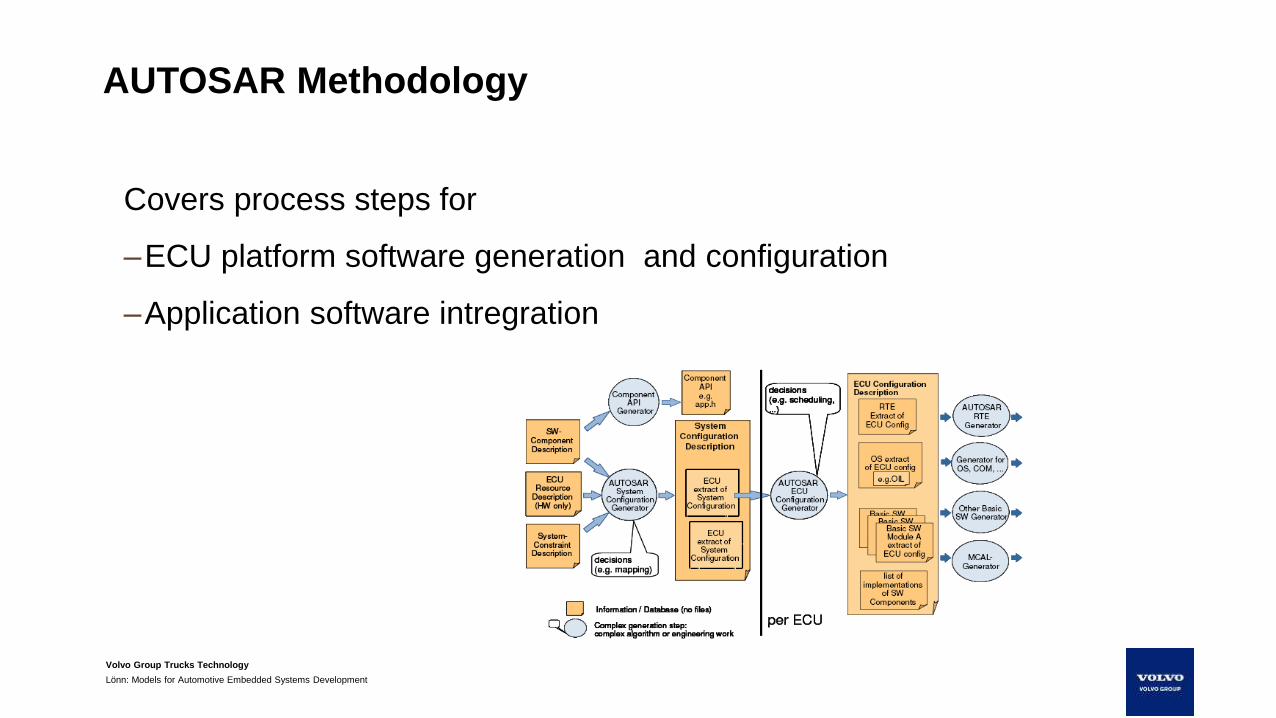
AUTOSAR Methodology
Covers process steps for
–ECU platform software generation and configuration
–Application software intregration
Lönn: Models for Automotive Embedded Systems Development
Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
SystemModel
AnalysisLevel
DesignLevel
ImplementationLevel
Envi
ron
men
t M
od
el
FunctionalAnalysisArchitecture
FunctionalDesignArchitecture
AUTOSAR Application SW
VehicleLevel
AUTOSAR Basic SW
AUTOSAR HW
HardwareDesignArchitecture
Var
iab
ility
Req
uir
emen
ts
TechnicalFeatureModel
Dep
end
abili
ty
Tim
ing
Extensions …
Data exchange over ports Allocation
EAST-ADL Representation
Lönn: Models for Automotive Embedded Systems Development
Features
of the vehicleChassis
TechnicalFeatureModel
Steer Brake Cruise
<<AnalysisArchitecture>> DemonstratorAA
<<FunctionalDevice>>
BrakePedal
<<FunctionalDevice>>
BrakeFrontLeft
<<FunctionalDevice>>
WheelSensorFrontLeft
<<FunctionalAnalysisArchitecture>> DemoFAA
<<ADLFunction>>
BrakeAlgorithm
<<ADLFunction>>
AbstractABSFrontLeft
VehicleSpeed
<<SWC>>
BaseBrake
<<SensorSWC>>
BrakePedal
<<LocalDeviceManager>>
WheelSensorFL
<<ActuatorSWC>>
Brake
<<SWC>>
ABSFrontLeft
SWComposition
VehicleSpeed
Abstract
functions
Concrete functions,
Hardware topology,
allocation to nodes
Software Architecture
as represented
by AUTOSAR
<<HWFunction>>
BrakePedal
<<HWFunction>>
BrakeFrontLeft
<<HWFunction>>
WheelSensorFrontLeft
FunctionalDesignArchitecture
<<LocalDeviceManager>>
BrakePedal
<<DesignFunction>>
BrakeController
<<DesignFunction>>
ABSFrontLeft<<LocalDeviceManager>>
BrakeActuatorFL
<<BSWFunction>>
BrakeIO
<<BSWFunction>>
PedalIO
<<LocalDeviceManager>>
WheelSensorFL<<BSWFunction>>
WSensIO
VehicleSpeed
HardwareDesignArchitecture<<ECUNode>>
PedalNode<<ECUNoder>>
WheelNode
<<Sensor>>
Pedal<<Actuator>>
Brake
<<Realize>>

Volvo Group Trucks Technology
EAST-ADL Model on Design Level
Functional Structure
Lönn: Models for Automotive Embedded Systems Development
Design Level
Application Functionality HW Functionality
<<FunctionalDesignArchitecture>> DemonstratorFDA
<<HWFunction>>
PedalSensor
<<HWFunction>>
BrakeActuatorFrontLeft
<<HWFunction>>
WheelSensorFrontLeft
<A
na
lysis
Fu
nctio
n>
>
Bra
ke
Pla
ntM
od
el
BSW Functionality
<<LocalDeviceManager>>
BrakePedal
<<DesignFunction>>
BrakeController
<<DesignFunction>>
ABSFrontLeft<<LocalDeviceManager>>
BrakeActuatorFL
<<BSWFunction>>
BrakeIO
<<BSWFunction>>
PedalIO
<<LocalDeviceManager>>
WheelSensorFL<<BSWFunction>>
WSensIO
VehicleSpeed
Pe
da
lAn
gle
Bra
ke
Fo
rce
Wh
ee
lSp
ee
dF
L
<<
En
viro
nm
en
tMo
de
l>>
De
mo
nstr
ato
rEM

Volvo Group Trucks Technology
EAST-ADL Model on Design Level
Functional Structure onto HW Architecture
Application Functionality HW Functionality
<<FunctionalDesignArchitecture>> DemonstratorFDA
<<HWFunction>>
PedalSensor
<<HWFunction>>
BrakeActuatorFrontLeft
<<HWFunction>>
WheelSensorFrontLeft
<A
na
lysis
Fu
nctio
n>
>
Bra
ke
Pla
ntM
od
el
BSW Functionality
<<LocalDeviceManager>>
BrakePedal
<<DesignFunction>>
BrakeController
<<DesignFunction>>
ABSFrontLeft<<LocalDeviceManager>>
BrakeActuatorFL
<<BSWFunction>>
BrakeIO
<<BSWFunction>>
PedalIO
<<LocalDeviceManager>>
WheelSensorFL<<BSWFunction>>
WSensIO
VehicleSpeed
Pe
da
lAn
gle
Bra
ke
Fo
rce
Wh
ee
lSp
ee
dF
L
<<
En
viro
nm
en
tMo
de
l>>
De
mo
nstr
ato
rEM
<<HardwareDesignArchitecture>>
Validator1HDA
<<Sensor>>
WheelSensorFrontLeft
<<Sensor>>
WheelSensorFrontRight
<<Sensor>>
WheelSensorRearLeft
<<Sensor>>
WheelSensorRearRight
<<ECUNode>>
Brake
<<Sensor>>
BrakePedal
<<Sensor>>
BrakeFrontLeft
<<Actuator>>
BrakeFrontRight
<<Actuator>>
BrakeRearLeft
<<Actuator>>
BrakeRearRight
<<ECUNode>>
ABS_FR
<<ECUNode>>
ABS_RL
<<ECUNode>>
ABS_RR
<<ECUNode>>
ABS_FL
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
EAST-ADL Model on Design Level
Timing/Triggering
<<FunctionTrigger>>
ABSTrigger
<<Mode>>
InMotion
<<PeriodicEventConstraint>>
ABSPeriodConstraint
Application Functionality HW Functionality
<<FunctionalDesignArchitecture>> DemonstratorFDA
<<HWFunction>>
PedalSensor
<<HWFunction>>
BrakeActuatorFrontLeft
<<HWFunction>>
WheelSensorFrontLeft
<A
na
lysis
Fu
nctio
n>
>
Bra
ke
Pla
ntM
od
el
BSW Functionality
<<LocalDeviceManager>>
BrakePedal
<<DesignFunction>>
BrakeController
<<DesignFunction>>
ABSFrontLeft<<LocalDeviceManager>>
BrakeActuatorFL
<<BSWFunction>>
BrakeIO
<<BSWFunction>>
PedalIO
<<LocalDeviceManager>>
WheelSensorFL<<BSWFunction>>
WSensIO
VehicleSpeed
Pe
da
lAn
gle
Bra
ke
Fo
rce
Wh
ee
lSp
ee
dF
L
<<
En
viro
nm
en
tMo
de
l>>
De
mo
nstr
ato
rEM
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
EAST-ADL Model on Design Level
<<FunctionBehavior>>
ABS_Behavior
Simulink model
Application Functionality HW Functionality
<<FunctionalDesignArchitecture>> DemonstratorFDA
<<HWFunction>>
PedalSensor
<<HWFunction>>
BrakeActuatorFrontLeft
<<HWFunction>>
WheelSensorFrontLeft
<A
na
lysis
Fu
nctio
n>
>
Bra
ke
Pla
ntM
od
el
BSW Functionality
<<LocalDeviceManager>>
BrakePedal
<<DesignFunction>>
BrakeController
<<DesignFunction>>
ABSFrontLeft<<LocalDeviceManager>>
BrakeActuatorFL
<<BSWFunction>>
BrakeIO
<<BSWFunction>>
PedalIO
<<LocalDeviceManager>>
WheelSensorFL<<BSWFunction>>
WSensIO
VehicleSpeed
Pe
da
lAn
gle
Bra
ke
Fo
rce
Wh
ee
lSp
ee
dF
L
<<
En
viro
nm
en
tMo
de
l>>
De
mo
nstr
ato
rEM
Transfer Function – ”Black-box” behavior
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
EAST-ADL Model on Design Level
<<FunctionBehavior>>
ABS_Behavior
Simulink model
My_ABS.mdl
Application Functionality HW Functionality
<<FunctionalDesignArchitecture>> DemonstratorFDA
<<HWFunction>>
PedalSensor
<<HWFunction>>
BrakeActuatorFrontLeft
<<HWFunction>>
WheelSensorFrontLeft
<A
na
lysis
Fu
nctio
n>
>
Bra
ke
Pla
ntM
od
el
BSW Functionality
<<LocalDeviceManager>>
BrakePedal
<<DesignFunction>>
BrakeController
<<DesignFunction>>
ABSFrontLeft<<LocalDeviceManager>>
BrakeActuatorFL
<<BSWFunction>>
BrakeIO
<<BSWFunction>>
PedalIO
<<LocalDeviceManager>>
WheelSensorFL<<BSWFunction>>
WSensIO
VehicleSpeed
Pe
da
lAn
gle
Bra
ke
Fo
rce
Wh
ee
lSp
ee
dF
L
<<
En
viro
nm
en
tMo
de
l>>
De
mo
nstr
ato
rEM
Transfer Function – ”Black-box” behavior
Lönn: Models for Automotive Embedded Systems Development
Volvo Group Trucks Technology
Application Functionality HW Functionality
<<FunctionalDesignArchitecture>> DemonstratorFDA
<<HWFunction>>
PedalSensor
<<HWFunction>>
BrakeActuatorFrontLeft
<<HWFunction>>
WheelSensorFrontLeft
<A
na
lysis
Fu
nctio
n>
>
Bra
ke
Pla
ntM
od
el
BSW Functionality
<<LocalDeviceManager>>
BrakePedal
<<DesignFunction>>
BrakeController
<<DesignFunction>>
ABSFrontLeft<<LocalDeviceManager>>
BrakeActuatorFL
<<BSWFunction>>
BrakeIO
<<BSWFunction>>
PedalIO
<<LocalDeviceManager>>
WheelSensorFL<<BSWFunction>>
WSensIO
VehicleSpeed
Pe
da
lAn
gle
Bra
ke
Fo
rce
Wh
ee
lSp
ee
dF
L
<<
En
viro
nm
en
tMo
de
l>>
De
mo
nstr
ato
rEM
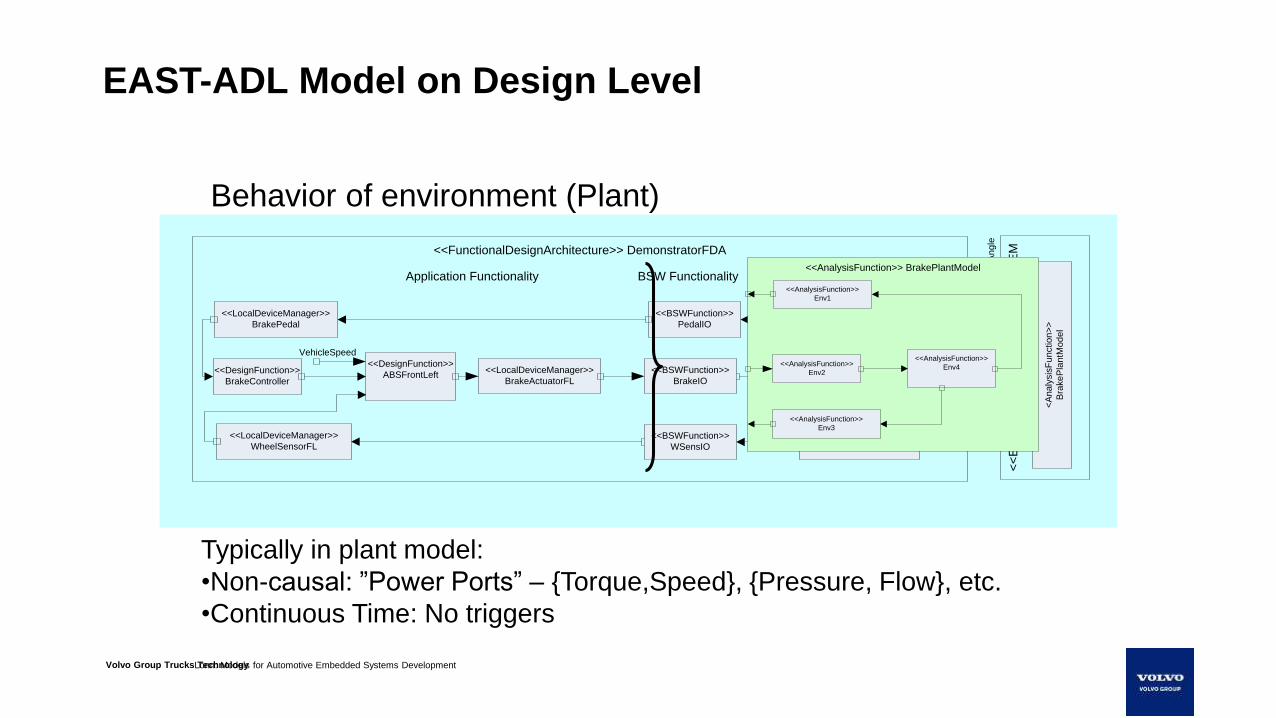
EAST-ADL Model on Design Level
Behavior of environment (Plant)
<<AnalysisFunction>> BrakePlantModel
<<AnalysisFunction>>
Env1
<<AnalysisFunction>>
Env2
<<AnalysisFunction>>
Env4
<<AnalysisFunction>>
Env3
Typically in plant model:
•Non-causal: ”Power Ports” – {Torque,Speed}, {Pressure, Flow}, etc.
•Continuous Time: No triggers
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Variability - Background
On average, less than 2 vehicles of the same configuration is built: Huge configuration space
All engineering information is governed by configuration and variant
– Requirements
– Components
– Tests
– Annotations
– ...
Co-variation SW and mechanics/plant
– SW configuration must be consistent with mechatronics and mechanics of truck
Customer variability vs technical variability
– Some variability is invisible to the user: Internal technical solutions
Detaled variability vs. Exposed variability
– Some details are only relevant for the component developer
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Variability Mechanism 1: Include/exclude
Lönn: Models for Automotive Embedded Systems Development
Feature model for configuration
Artefacts subject to configuration

Volvo Group Trucks Technology
Variability Mechanism 2: Parameterize
Lönn: Models for Automotive Embedded Systems Development
Parameter
”FunctionAvailable”
Feature model for configuration
Artefacts subject to configuration
• Include/exclude
• Variant-specific calibration
True
False
Parameter
”MaxRideHeight”12
8

Volvo Group Trucks Technology
Public Feature Model
Compositional Variability
Lönn: Models for Automotive Embedded Systems Development
wi:WiperIntegrator
rsThr:Threshold
wiperBtnSig
rainSensorSig
thresholdValuerainSensor
Request
driver
Request
WiperController
WiperControlthresholdValue :=
front ? 140 : rear ? 80 : undef
Variant 1
Variant 2
Front Rear
Volvo Group Trucks Technology
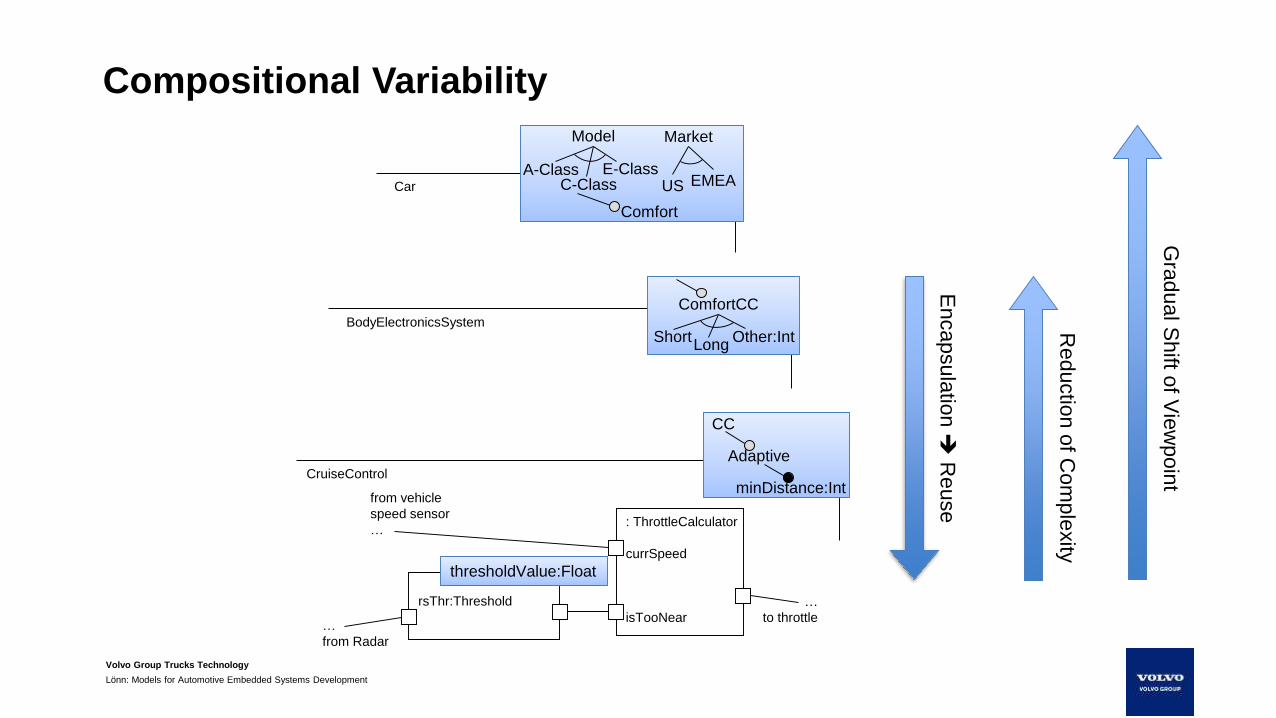
Compositional Variability
Lönn: Models for Automotive Embedded Systems Development
: ThrottleCalculator
rsThr:Threshold
…
from Radar
isTooNear
currSpeed
…
to throttle
CruiseControl
thresholdValue:Float
BodyElectronicsSystem
CC
minDistance:Int
Adaptive
ComfortCC
ShortLong
Other:Int
Car
Model
A-ClassC-Class
E-Class
Market
US EMEA
Comfort
from vehicle
speed sensor
…
Reductio
n o
f Com
ple
xity
Gra
dual S
hift o
f Vie
wpoin
t
Encapsula
tion
Reuse

Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Engineering Workflow
Represent
– Models and Code
Resolve
– Configure and Resolve variability
Generate
– Automatic preparation for each tool
Simulate/Analyze/Verify
– Software centric simulations
– Physics centric simulations
– Arithmetic analysis
– Formal verification
– ...
Lönn: Models for Automotive Embedded Systems Development
Simulate
Resolve
Adapt System
ADAPT Virtual System Bus
RepresentFunctional Block
Software Component
Plant Element
Electrical Device
Environment Element
Analyse
UPPAAL
Verify
UPPAAL
GenerateModule
SWC
Module
FMU
GenerateModule
SWC
Module
FMU

Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development
Configuration
Application SW
Integration
Platform SW
Integration
ECU, I/O,
Sensors & Actuators
Plant
Integration
Environment
Integration

Volvo Group Trucks Technology
Software:
AUTOSAR SWC Selection
AUTOSAR SWC Parameterization
Configuration ports
Initialization valuesNon-Software
Logical Component Selection
Function Mockup Unit Parameterization
Configuration Ports
Initialization values
Lönn: Models for Automotive Embedded Systems Development
Configuration
Environment:
Traffic Scenario:
OpenScenario Selection & Parameterization
Roads:
OpenRoad Selection and Parameterization
Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development
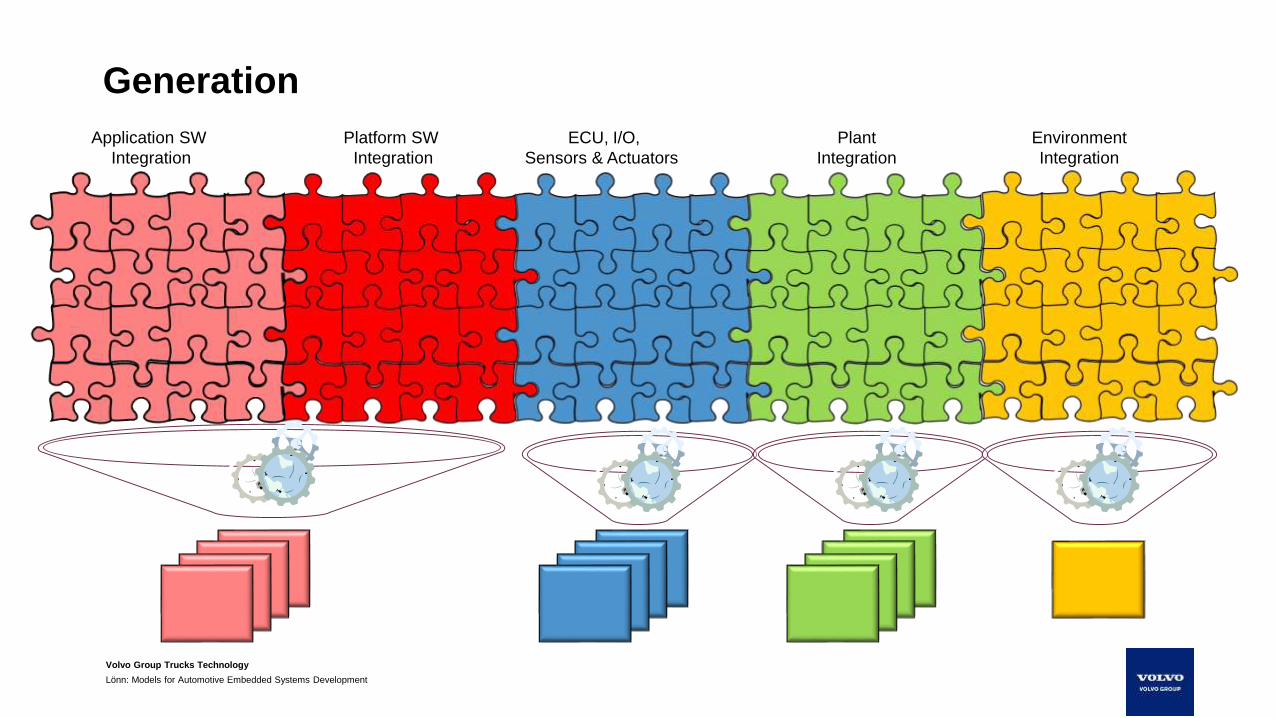
Generation
Application SW
Integration
Platform SW
Integration
ECU, I/O,
Sensors & Actuators
Plant
Integration
Environment
Integration
Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development
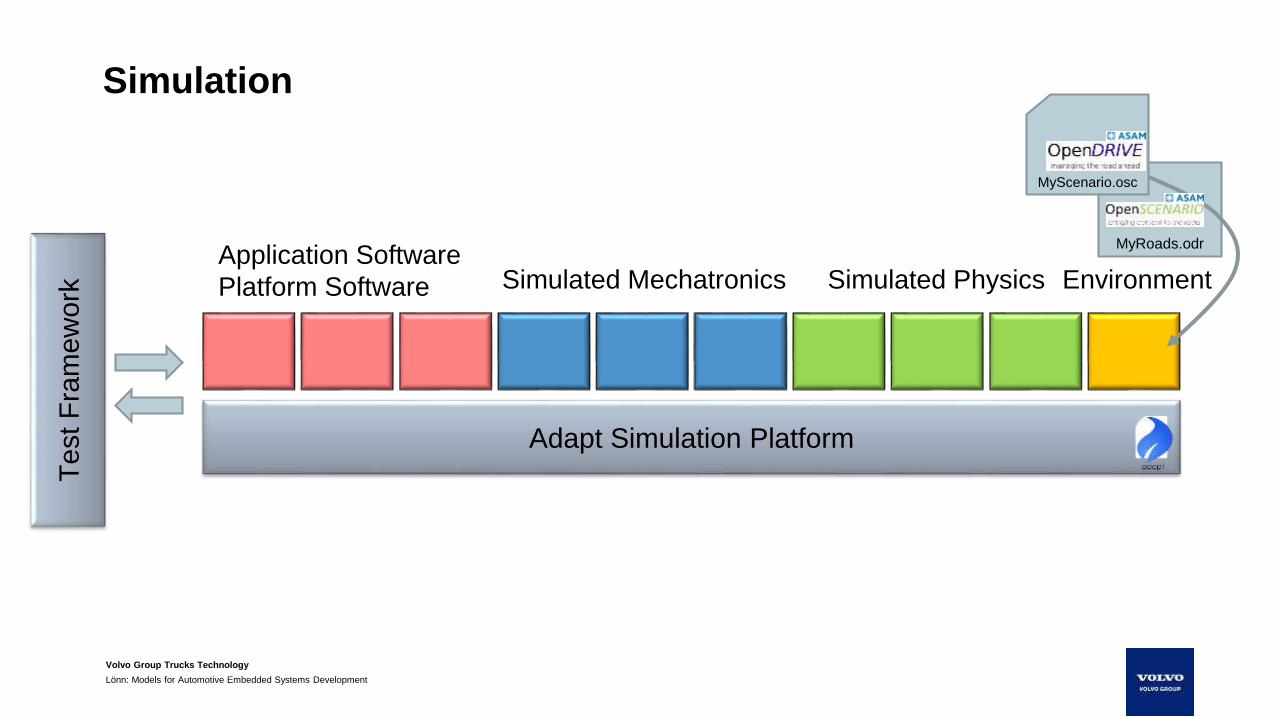
Simulation
Adapt Simulation Platform
Simulated MechatronicsApplication Software
Platform Software Simulated Physics Environment
MyRoads.odr
MyScenario.osc
Test F
ram
ew
ork

Volvo Group Trucks Technology
.eaxml
.arxml
.fmu
.c
.h
Lönn: Models for Automotive Embedded Systems Development
Engineering Automation
gitLocal Unit Test
Test
Cases
Local PC or Cloud
Publish.xml
.dllArtifactory
TestSimulation Build
Make
Changes
Automatic
Resolution
and
Build
Automatic
InvocationAutomatic Test

Volvo Group Trucks Technology
Conclusion
AUTOSAR software platform is automotive de-facto standard
EAST-ADL supports automotive embedded systems modelling
“starting” with needs and requirements and
“ending” with an AUTOSAR SW architecture
An agreed modelling language makes it possible
– to understand engineering information from other departments/disciplines/companies
– to exchange engineering models between different organizations and tools
– to progress jointly on tools and methodology for modelling, analysis and synthesis
Lönn: Models for Automotive Embedded Systems Development

Volvo Group Trucks Technology
Lönn: Models for Automotive Embedded Systems Development
Summary
New Vehicle Functionality
Development Efficiency
Short Lead Time
Iterative & Incremental
Development
Engineering Automation
Automatic Configurability
Automatic Evaluation
Variability Modelling
System &Plant Modelling
ConfigureModel Simulate