motion planning: a journey of robots, digital actors, surgical instruments, molecules and other...
Post on 20-Dec-2015
215 views
TRANSCRIPT

Motion Planning:Motion Planning:A Journey of Robots, Digital Actors, A Journey of Robots, Digital Actors,
Surgical Instruments, Molecules Surgical Instruments, Molecules and Other Artifactsand Other Artifacts
Jean-Claude LatombeJean-Claude Latombe
Computer Science DepartmentComputer Science DepartmentStanford UniversityStanford University

Goal of Motion PlanningGoal of Motion Planning
Compute Compute motion strategiesmotion strategies, e.g.:, e.g.:
– geometric paths geometric paths
– time-parameterized trajectoriestime-parameterized trajectories
– sequence of sensor-based motion commandssequence of sensor-based motion commands
To achieve To achieve high-level goals, high-level goals, e.g.:e.g.:
– go from A to B without colliding with obstaclesgo from A to B without colliding with obstacles
– assemble product Passemble product P
– build map of environment Ebuild map of environment E
– find object Ofind object O

Goal of Motion PlanningGoal of Motion Planning
Compute Compute motion strategiesmotion strategies, e.g.:, e.g.:
– geometric paths geometric paths
– time-parameterized trajectoriestime-parameterized trajectories
– sequence of sensor-based motion commandssequence of sensor-based motion commands
To achieve To achieve high-level goals, high-level goals, e.g.:e.g.:
– go from A to B without colliding with obstaclesgo from A to B without colliding with obstacles
– assemble product Passemble product P
– build map of environment Ebuild map of environment E
– find object Ofind object O
Goal of Motion PlanningGoal of Motion Planning
Compute Compute motion strategiesmotion strategies, e.g.:, e.g.:
– geometric paths geometric paths
– time-parameterized trajectoriestime-parameterized trajectories
– sequence of sensor-based motion commandssequence of sensor-based motion commands
To achieve To achieve high-level goals, high-level goals, e.g.:e.g.:
– go from A to B without colliding with obstaclesgo from A to B without colliding with obstacles
– assemble product Passemble product P
– build map of environment Ebuild map of environment E
– find object Ofind object O

Basic ProblemBasic Problem

Extensions to the Basic ProblemExtensions to the Basic Problem Moving obstaclesMoving obstacles
Multiple robotsMultiple robots
Movable objectsMovable objects
Assembly planningAssembly planning
Goal is to acquire Goal is to acquire information by sensinginformation by sensing
– Model buildingModel building
– Object finding/trackingObject finding/tracking Nonholonomic constraintsNonholonomic constraints
Dynamic constraintsDynamic constraints
Optimal planningOptimal planning
Uncertainty in control and Uncertainty in control and sensingsensing
Exploiting task mechanics Exploiting task mechanics (sensorless motions)(sensorless motions)
Physical models and Physical models and deformable objectsdeformable objects
Integration of planning Integration of planning and controland control
Extensions to the Basic ProblemExtensions to the Basic Problem Moving obstaclesMoving obstacles
Multiple robotsMultiple robots
Movable objectsMovable objects
Assembly planningAssembly planning
Goal is to acquire Goal is to acquire information by sensinginformation by sensing
– Model buildingModel building
– Object finding/trackingObject finding/tracking Nonholonomic constraintsNonholonomic constraints
Dynamic constraintsDynamic constraints
Optimal planningOptimal planning
Uncertainty in control and Uncertainty in control and sensingsensing
Exploiting task mechanics Exploiting task mechanics (sensorless motions)(sensorless motions)
Physical models and Physical models and deformable objectsdeformable objects
Integration of planning Integration of planning and controland control
Extensions to the Basic ProblemExtensions to the Basic Problem Moving obstaclesMoving obstacles
Multiple robotsMultiple robots
Movable objectsMovable objects
Assembly planningAssembly planning
Goal is to acquire Goal is to acquire information by sensinginformation by sensing
– Model buildingModel building
– Object finding/trackingObject finding/tracking Nonholonomic constraintsNonholonomic constraints
Dynamic constraintsDynamic constraints
Optimal planningOptimal planning
Uncertainty in control and Uncertainty in control and sensingsensing
Exploiting task mechanics Exploiting task mechanics (sensorless motions)(sensorless motions)
Physical models and Physical models and deformable objectsdeformable objects
Integration of planning Integration of planning and controland control

Extensions to the Basic ProblemExtensions to the Basic Problem Moving obstaclesMoving obstacles
Multiple robotsMultiple robots
Movable objectsMovable objects
Assembly planningAssembly planning
Goal is to acquire Goal is to acquire information by sensinginformation by sensing
– Model buildingModel building
– Object finding/trackingObject finding/tracking Nonholonomic constraintsNonholonomic constraints
Dynamic constraintsDynamic constraints
Optimal planningOptimal planning
Uncertainty in control and Uncertainty in control and sensingsensing
Exploiting task mechanics Exploiting task mechanics (sensorless motions)(sensorless motions)
Physical models and Physical models and deformable objectsdeformable objects
Integration of planning Integration of planning and controland control

OutlineOutline Some historical steps and achievementsSome historical steps and achievements
ApplicationsApplications
Computational approaches:Computational approaches:
– Criticality-based motion planningCriticality-based motion planning
– Random-sampling motion planningRandom-sampling motion planning Some challenging problems aheadSome challenging problems ahead
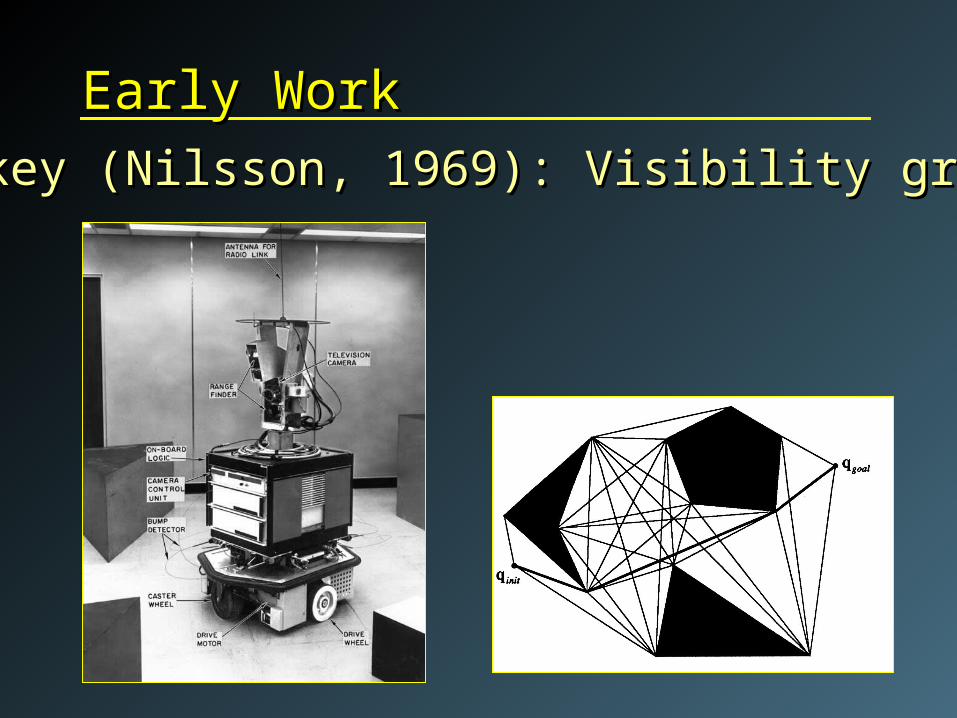
Early WorkEarly Work
Shakey (Nilsson, 1969): Visibility graphShakey (Nilsson, 1969): Visibility graph

Mathematical FoundationsMathematical Foundations
C = S1 x S1
Lozano-Perez, 1980: Configuration SpaceLozano-Perez, 1980: Configuration Space
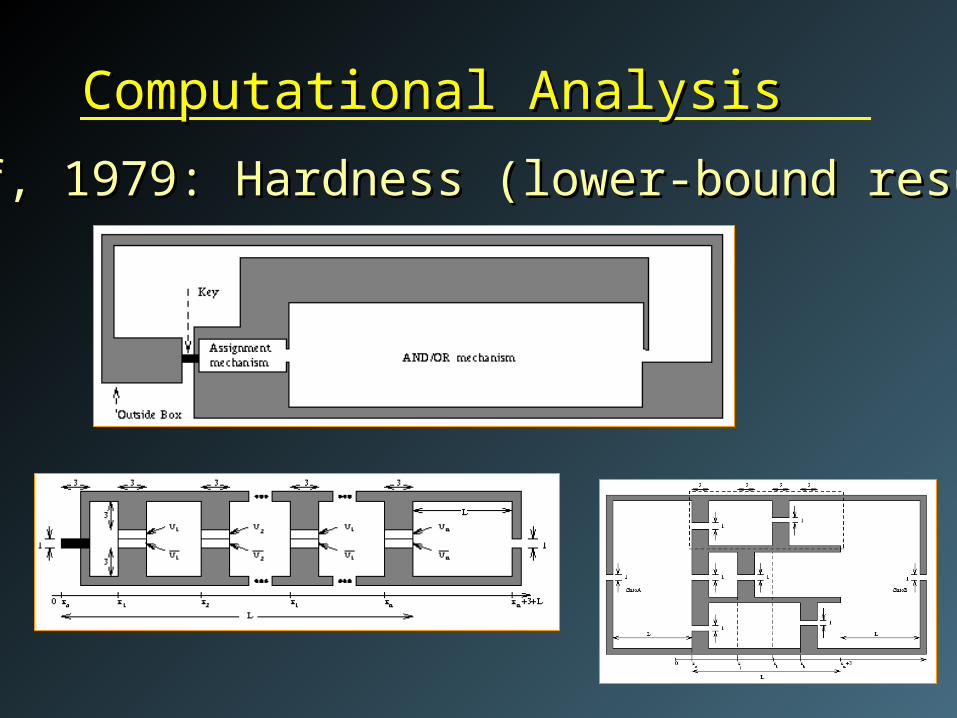
Computational AnalysisComputational Analysis
Reif, 1979: Hardness (lower-bound results) Reif, 1979: Hardness (lower-bound results)

Exact General-Purpose Path PlannersExact General-Purpose Path Planners
- Schwarz and Sharir, 1983: - Schwarz and Sharir, 1983: Exact cell Exact cell decomposition based on Collins techniquedecomposition based on Collins technique
- Canny, 1987: - Canny, 1987: Silhouette methodSilhouette method
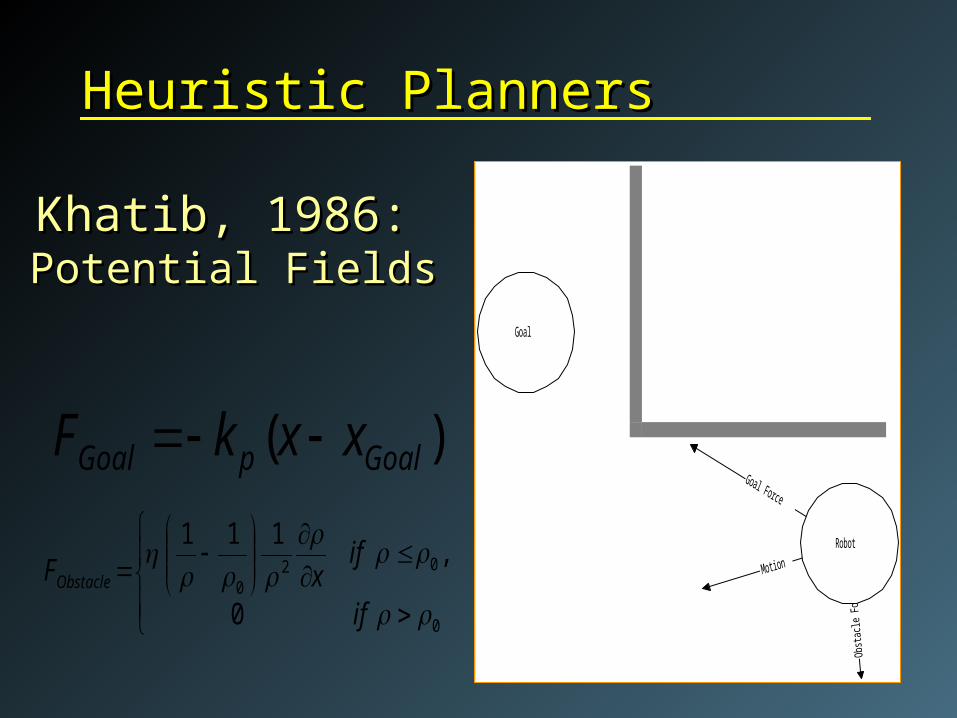
Heuristic PlannersHeuristic Planners
Goal
Robot
)( GoalpGoal xxkF
0
020
0
,111
if
ifxFObstacle
Khatib, 1986:Khatib, 1986:
Potential FieldsPotential Fields

Nonholonomic RobotsNonholonomic Robots
Laumond, 1986Laumond, 1986

Underactuated RobotsUnderactuated Robots
Lynch, Shiroma, Arai, Lynch, Shiroma, Arai, and Tanie, 1998and Tanie, 1998

Part OrientationPart Orientation
Godlberg, 1993Godlberg, 1993
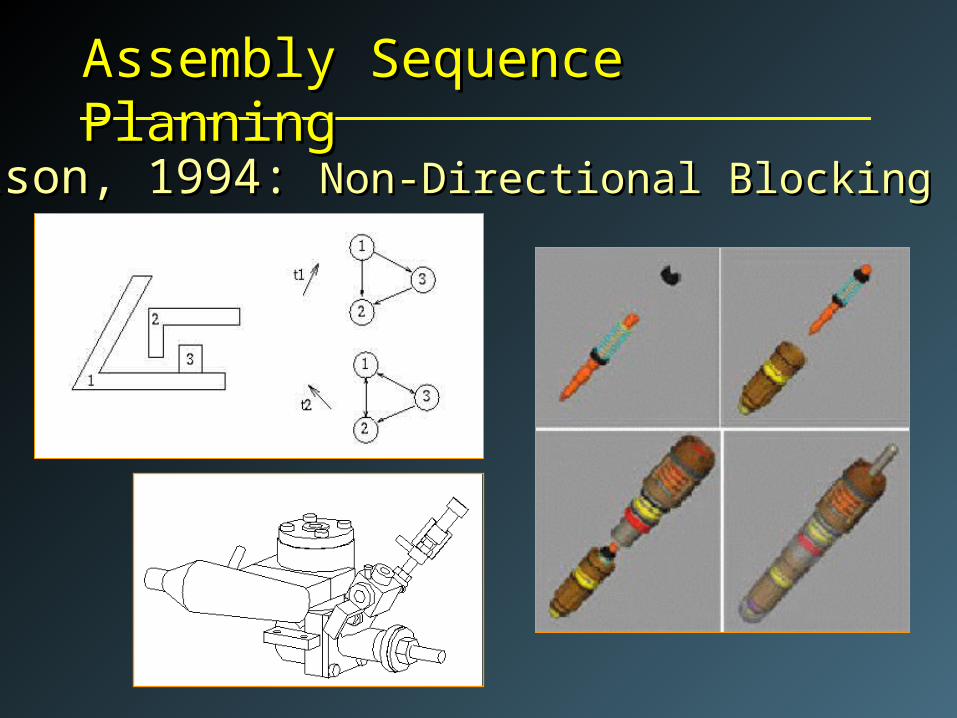
Assembly Sequence PlanningAssembly Sequence Planning
Wilson, 1994: Wilson, 1994: Non-Directional Blocking GraphsNon-Directional Blocking Graphs

Manipulation PlanningManipulation Planning
Tsai-Yen Li, 1994Tsai-Yen Li, 1994
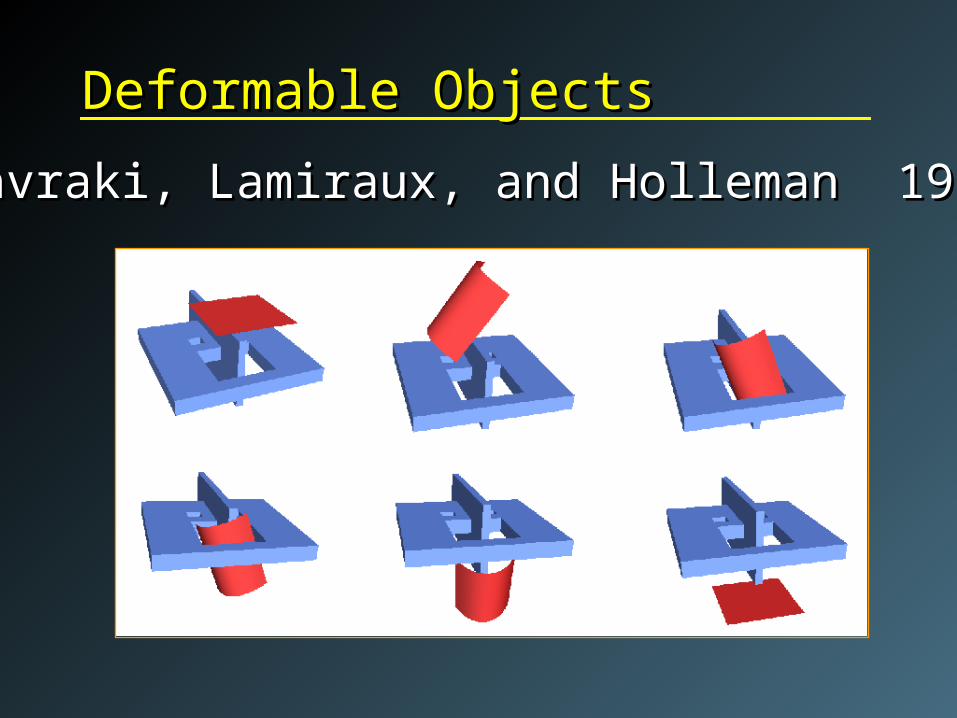
Deformable ObjectsDeformable Objects
Kavraki, Lamiraux, and Holleman 1998Kavraki, Lamiraux, and Holleman 1998

Target FindingTarget Finding
Guibas, Latombe, LaValle, Guibas, Latombe, LaValle, Lin, and Motwani, 1997Lin, and Motwani, 1997

Integration of Planning and ControlIntegration of Planning and Control
Brock and Khatib, 1999Brock and Khatib, 1999
OutlineOutline Some historical steps and achievementsSome historical steps and achievements
ApplicationsApplications
Computational approaches:Computational approaches:
– Criticality-based motion planningCriticality-based motion planning
– Random-sampling motion planningRandom-sampling motion planning Some challenging problems aheadSome challenging problems ahead

Robot Programming and PlacementRobot Programming and Placement
David Hsu, 1999David Hsu, 1999

Design for Manufacturing and ServicingDesign for Manufacturing and Servicing
General ElectricGeneral Electric General MotorsGeneral Motors
General MotorsGeneral Motors

Design of Large FacilitiesDesign of Large Facilities
EDF and LAAS-CNRS (MOLOG project), 1999

Verification of Building CodeVerification of Building Code
Charles Han, 1998Charles Han, 1998

Graphic Animation of Digital ActorsGraphic Animation of Digital Actors
Koga, Kondo, Kuffner, and Latombe, 1994Koga, Kondo, Kuffner, and Latombe, 1994
The MotionThe MotionFactoryFactory
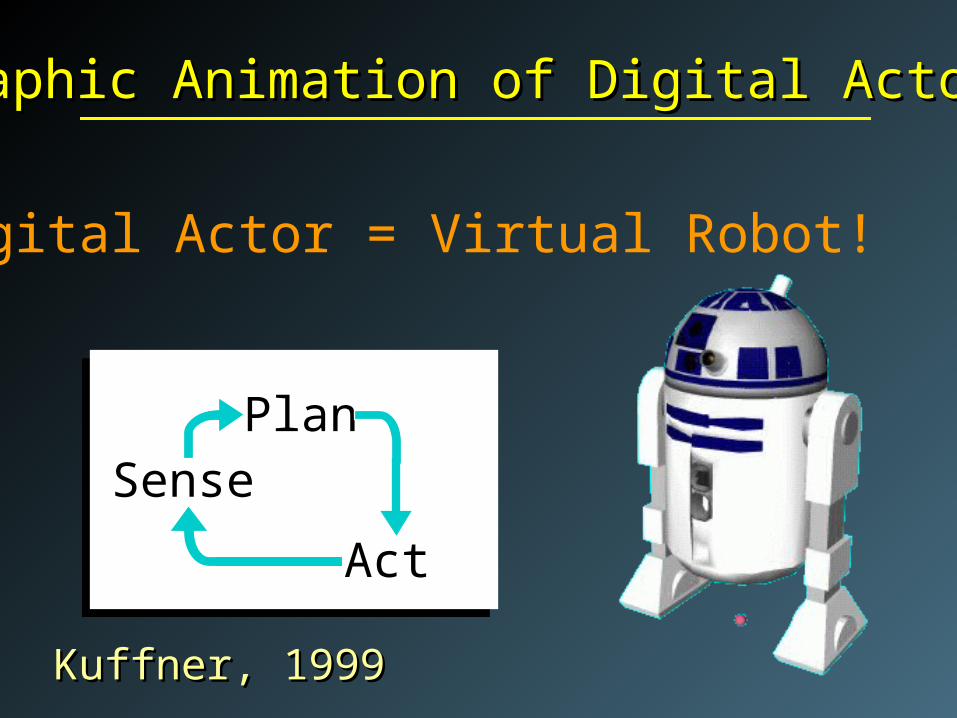
PlanSense
Act
Digital Actor = Virtual Robot!
Graphic Animation of Digital ActorsGraphic Animation of Digital Actors
Kuffner, 1999Kuffner, 1999

Vision module imageActor camera image
Graphic Animation of Digital ActorsGraphic Animation of Digital Actors
Segment environmentSegment environment Render false-color scene offscreen Render false-color scene offscreen Scan pixels & record IDsScan pixels & record IDs
Simulated VisionSimulated Vision

Graphic Animation of Digital ActorsGraphic Animation of Digital Actors

Surgical PlanningSurgical Planning
Cyberknife System (Accuray, Inc.) Cyberknife System (Accuray, Inc.) CARABEAMER Planner CARABEAMER Planner
Tombropoulos, 1997 Tombropoulos, 1997

Prediction of Molecular MotionsPrediction of Molecular Motions
Amit Singh, 1999Amit Singh, 1999

OutlineOutline Some historical steps and achievementsSome historical steps and achievements
ApplicationsApplications
Computational approaches:Computational approaches:
– Criticality-based motion planningCriticality-based motion planning
– Random-sampling motion planningRandom-sampling motion planning Some challenging problems aheadSome challenging problems ahead
Approaches to Motion PlanningApproaches to Motion Planning
Goal: Goal: Answer queries about the connectivity of a Answer queries about the connectivity of a certain space (e.g., the collision-free subset of certain space (e.g., the collision-free subset of configuration space)configuration space)
Approaches to Motion PlanningApproaches to Motion Planning
Old view (Latombe, 1991):Old view (Latombe, 1991):
– RoadmapsRoadmaps
– Cell decompositionCell decomposition
– Potential fieldPotential field

Approaches to Motion PlanningApproaches to Motion Planning
Old view (Latombe, 1991):Old view (Latombe, 1991):
– RoadmapsRoadmaps
– Cell decompositionCell decomposition
– Potential fieldPotential field New View (Latombe, 2000):New View (Latombe, 2000):
– Finding criticalities Finding criticalities
– Random samplingRandom sampling
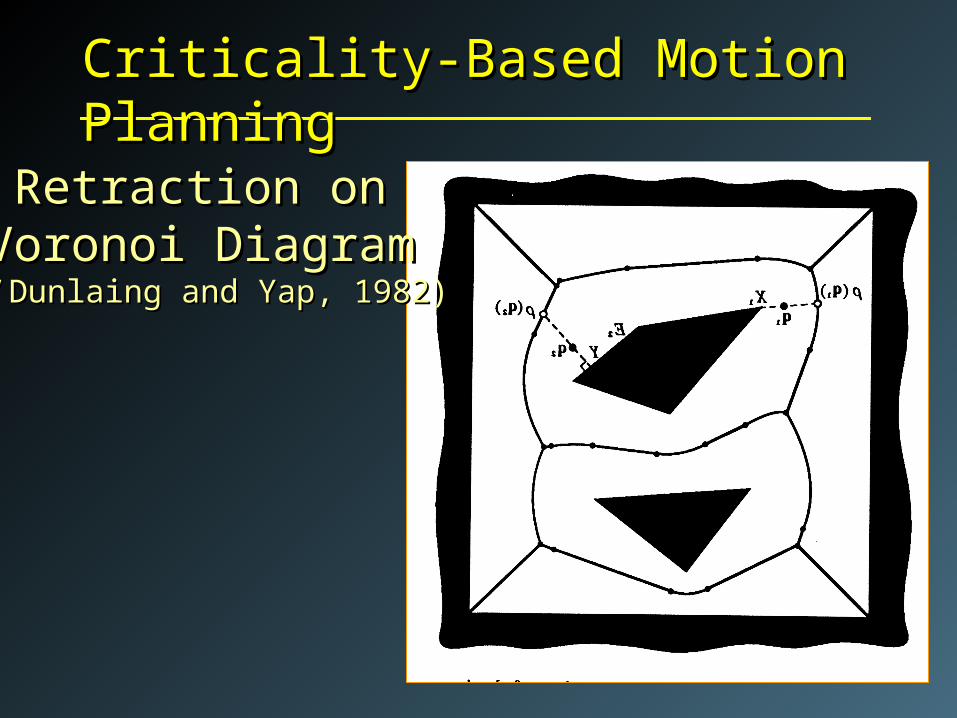
Criticality-Based Motion PlanningCriticality-Based Motion Planning
Retraction onRetraction onVoronoi DiagramVoronoi Diagram
(O’Dunlaing and Yap, 1982)(O’Dunlaing and Yap, 1982)

Criticality-Based Motion PlanningCriticality-Based Motion Planning
Part orientationPart orientation (Goldberg, 1993) (Goldberg, 1993)

Criticality-Based Motion PlanningCriticality-Based Motion Planning
Non-Directional Blocking Graphs Non-Directional Blocking Graphs for assembly planning (Wilson, 1994)for assembly planning (Wilson, 1994)

Criticality-Based Motion PlanningCriticality-Based Motion PlanningNon-Directional Preimage for Non-Directional Preimage for landmark-based navigation (Lazanas, 1995)landmark-based navigation (Lazanas, 1995)

Criticality-Based Motion PlanningCriticality-Based Motion PlanningNon-Directional Preimage for Non-Directional Preimage for landmark-based navigation (Lazanas, 1995)landmark-based navigation (Lazanas, 1995)

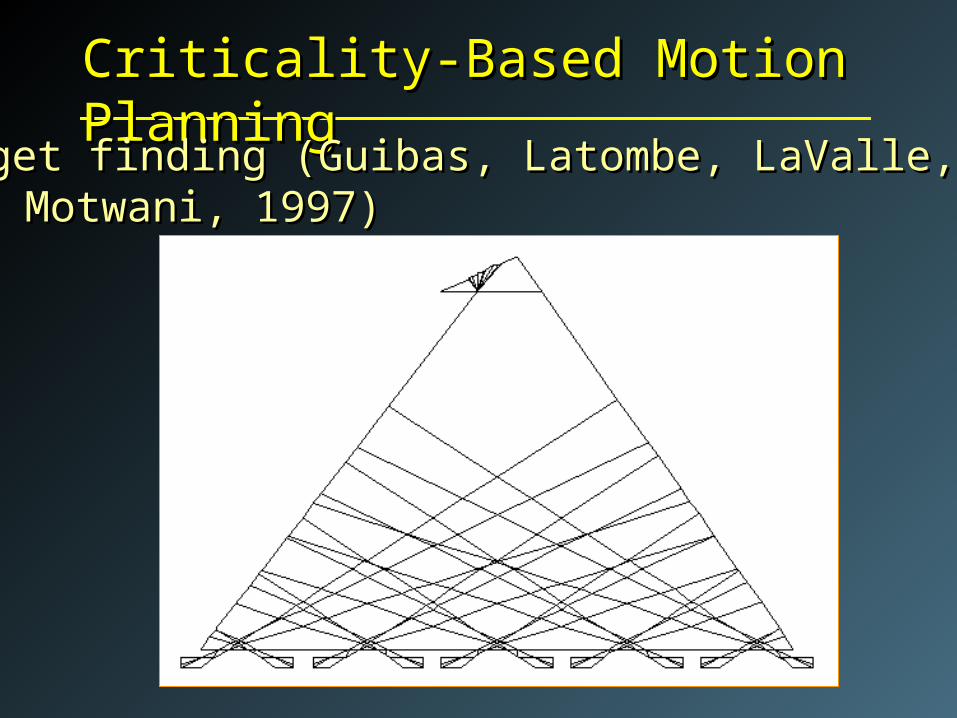
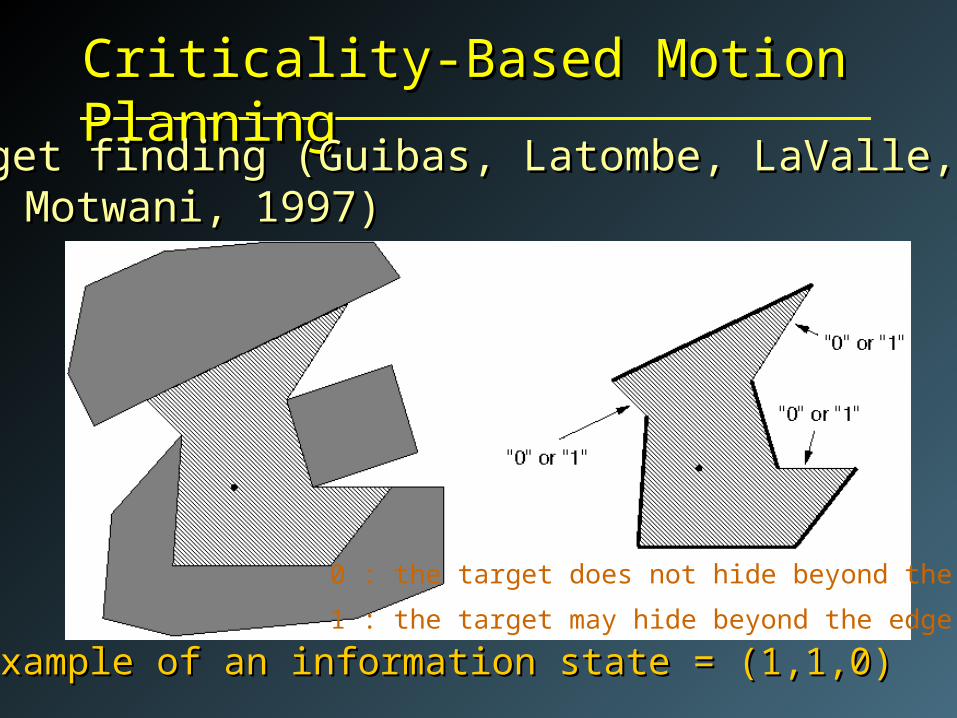
Criticality-Based Motion PlanningCriticality-Based Motion PlanningTarget finding (Guibas, Latombe, LaValle, Target finding (Guibas, Latombe, LaValle, Lin, and Motwani, 1997) Lin, and Motwani, 1997)

Criticality-Based Motion PlanningCriticality-Based Motion PlanningTarget finding (Guibas, Latombe, LaValle, Target finding (Guibas, Latombe, LaValle, Lin, and Motwani, 1997) Lin, and Motwani, 1997)
Criticality-Based Motion PlanningCriticality-Based Motion PlanningTarget finding (Guibas, Latombe, LaValle, Target finding (Guibas, Latombe, LaValle, Lin, and Motwani, 1997) Lin, and Motwani, 1997)
Criticality-Based Motion PlanningCriticality-Based Motion PlanningTarget finding (Guibas, Latombe, LaValle, Target finding (Guibas, Latombe, LaValle, Lin, and Motwani, 1997) Lin, and Motwani, 1997)
Example of an information state = (1,1,0)Example of an information state = (1,1,0)
0 : the target does not hide beyond the edge
1 : the target may hide beyond the edge

Criticality-Based Motion PlanningCriticality-Based Motion PlanningTarget finding (Guibas, Latombe, LaValle, Target finding (Guibas, Latombe, LaValle, Lin, and Motwani, 1997) Lin, and Motwani, 1997)
Recontaminated area
Criticality-Based Motion PlanningCriticality-Based Motion Planning
Advantage:Advantage:
– CompletenessCompleteness Drawbacks:Drawbacks:
– Computational complexity Computational complexity
– Difficult to implementDifficult to implement
OutlineOutline Some historical steps and achievementsSome historical steps and achievements
ApplicationsApplications
Computational approaches:Computational approaches:
– Criticality-based motion planningCriticality-based motion planning
– Random-sampling motion planningRandom-sampling motion planning Some challenging problems aheadSome challenging problems ahead

Random-Sampling PlanningRandom-Sampling Planning
admissible space
qqbb
qqgg
milestone
[Kavraki, Svetska, Latombe,Overmars, 95][Kavraki, Svetska, Latombe,Overmars, 95]
(Probabilistic Roadmap)(Probabilistic Roadmap)

MotivationMotivationComputing an explicit representation of the admissibleComputing an explicit representation of the admissiblespace is hard, but checking that a point lies in the space is hard, but checking that a point lies in the admissible space is fast admissible space is fast

Why Does it Work?Why Does it Work?
[Kavraki, Latombe, Motwani, Raghavan, 95]
Relation with Art-Gallery problemsRelation with Art-Gallery problems
In Theory, Random-Sampling Planning…In Theory, Random-Sampling Planning…
Is Is probabilistically completeprobabilistically complete, i.e., whenever a , i.e., whenever a solution exists, the probability that it finds one solution exists, the probability that it finds one tends toward 1 as the number tends toward 1 as the number NN of milestones of milestones increasesincreases
Under general hypotheses, the rate of convergence Under general hypotheses, the rate of convergence is exponential in is exponential in NN, i.e.:, i.e.:
Prob[failure] = Prob[failure] = KK exp(- exp(-NN)) Computational gain is obtained against a “small” Computational gain is obtained against a “small”
loss of completeness loss of completeness

Expansiveness of Admissible SpaceExpansiveness of Admissible Space

Expansiveness of Admissible SpaceExpansiveness of Admissible Space
Lookout of Lookout of F1F1
The admissible space is expansive if each of its subsets has a large lookout
Prob[failure] = K exp(-N)
In practice, Random-Sampling Planners…In practice, Random-Sampling Planners…
Are fastAre fast Deal effectively with many-dof robots Deal effectively with many-dof robots Deal well with complex admissibility constraintsDeal well with complex admissibility constraints Are easy to implementAre easy to implement Have solved complex problemsHave solved complex problems


Real-Time Planning with Dynamic ConstraintsReal-Time Planning with Dynamic Constraints
air bearingair bearing
gaz tankgaz tank
air thrustersair thrustersobstacles
robotrobot
(Kindel, Hsu, Latombe, and Rock, 2000)(Kindel, Hsu, Latombe, and Rock, 2000)
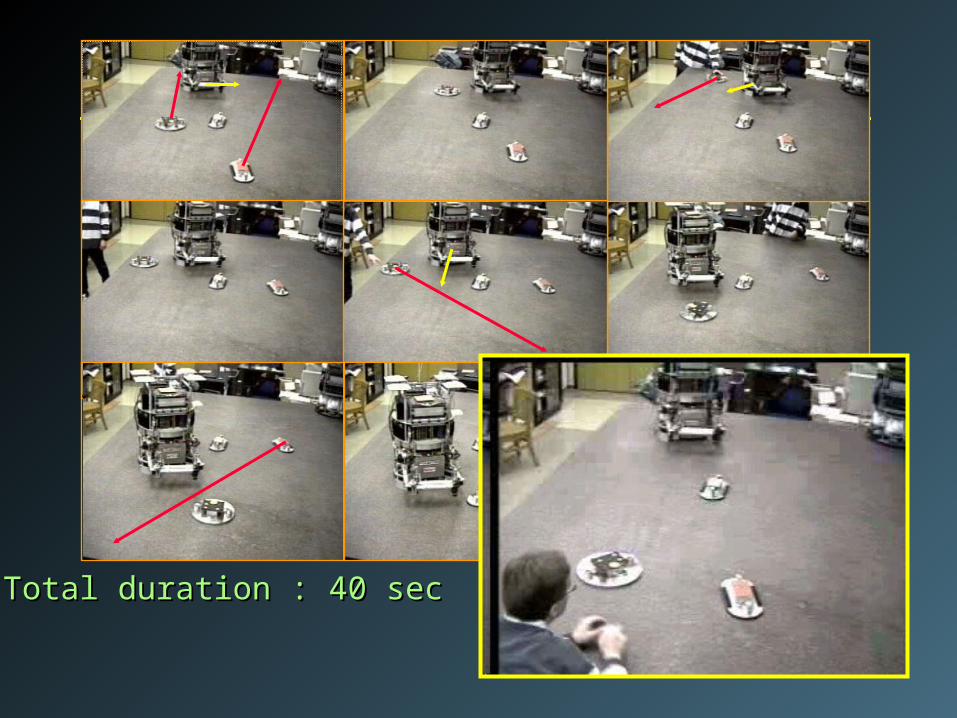
Total duration : 40 secTotal duration : 40 sec

Interactive Planning of Manipulation MotionsInteractive Planning of Manipulation Motions
ReachReach
GrabGrab
TransferTransfer
ReleaseRelease
ReturnReturn
Kuffner, 1999Kuffner, 1999

Random-Sampling Radiosurgical PlanningRandom-Sampling Radiosurgical Planning
Cyberknife (Neurosurgery Dept., Stanford, Cyberknife (Neurosurgery Dept., Stanford, Accuray) Accuray)
Tombropoulos, 1997Tombropoulos, 1997
CARABEAMER PlannerCARABEAMER Planner
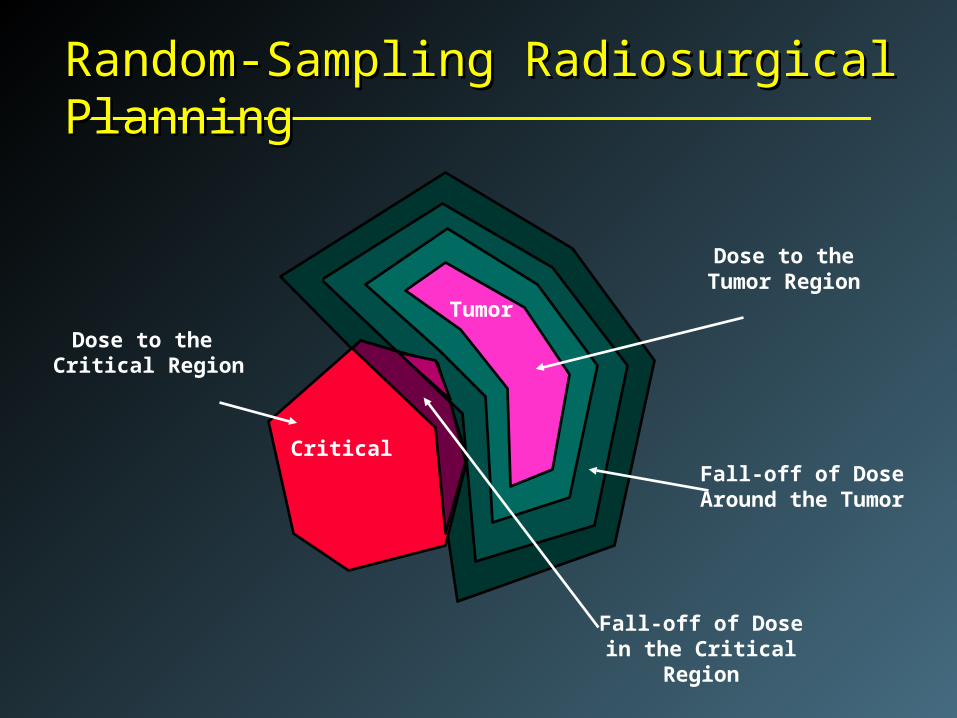
Random-Sampling Radiosurgical PlanningRandom-Sampling Radiosurgical Planning
Dose to the Critical Region
Critical
Tumor
Fall-off of Dose Around the Tumor
Dose to theTumor Region
Fall-off of Dosein the Critical Region

Random-Sampling Radiosurgical PlanningRandom-Sampling Radiosurgical Planning

Random-Sampling Radiosurgical PlanningRandom-Sampling Radiosurgical Planning
• 2000 < Tumor < 22002000 < B2 + B4 < 22002000 < B4 < 22002000 < B3 + B4 < 22002000 < B3 < 22002000 < B1 + B3 + B4 < 22002000 < B1 + B4 < 22002000 < B1 + B2 + B4 < 22002000 < B1 < 22002000 < B1 + B2 < 2200
• 0 < Critical < 5000 < B2 < 500
T
C
B1
B2
B3B4
T
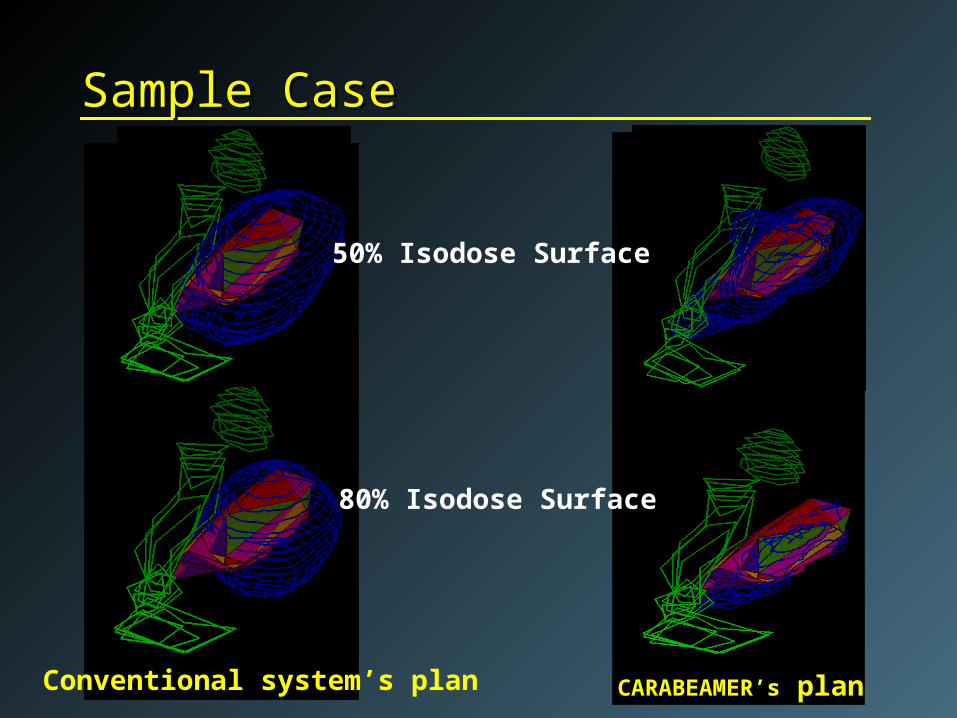
Sample CaseSample Case
50% Isodose Surface
80% Isodose Surface
Conventional system’s plan CARABEAMER’s plan

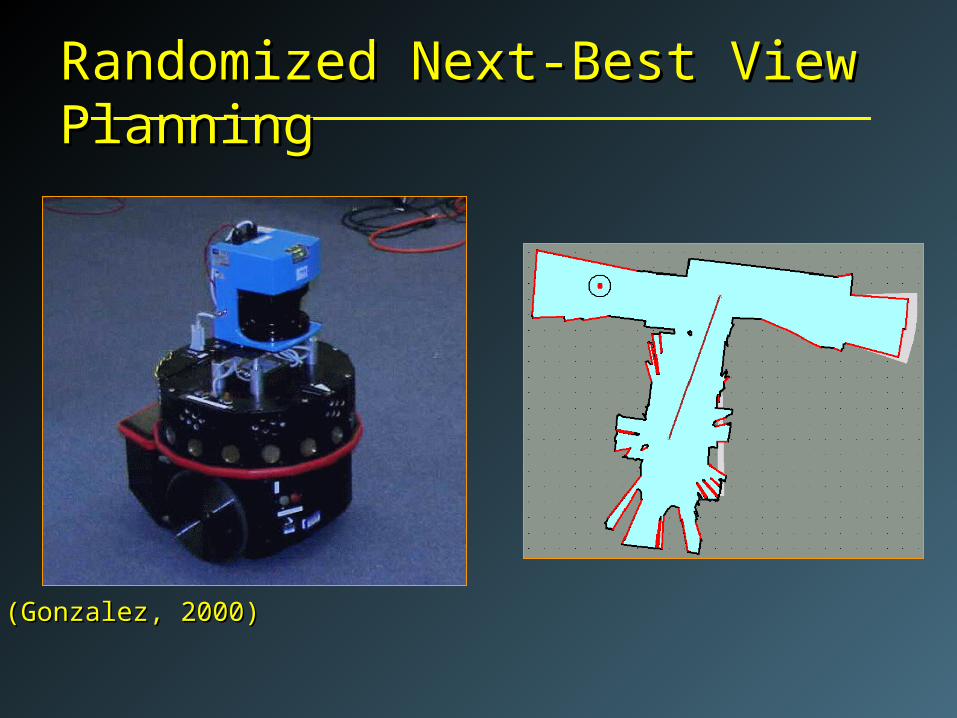
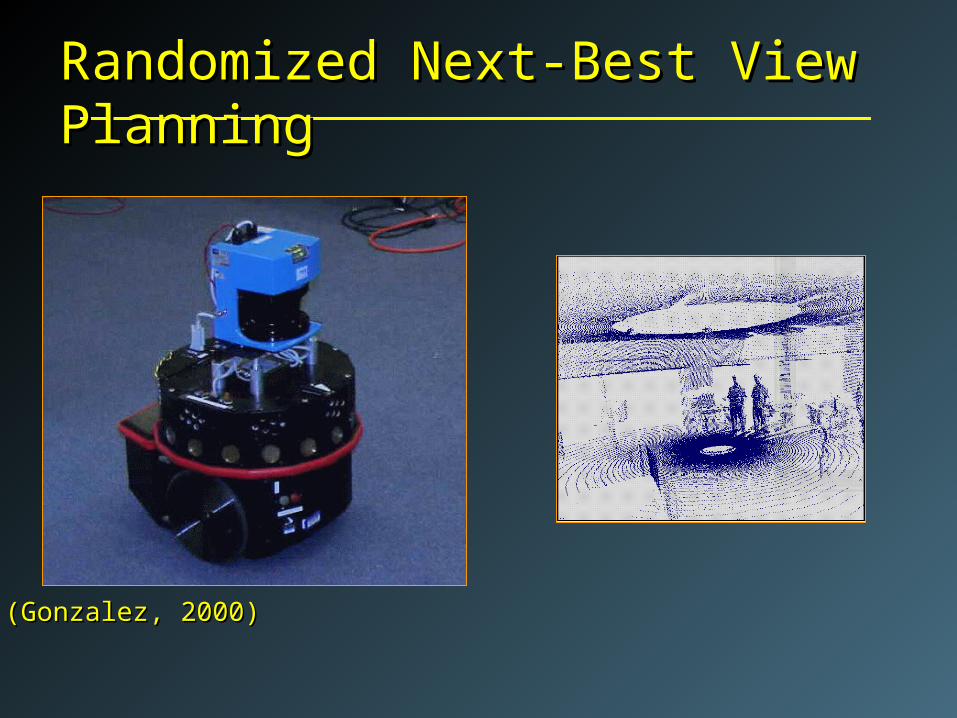
Randomized Next-Best View PlanningRandomized Next-Best View Planning
(Gonzalez, 2000)(Gonzalez, 2000)
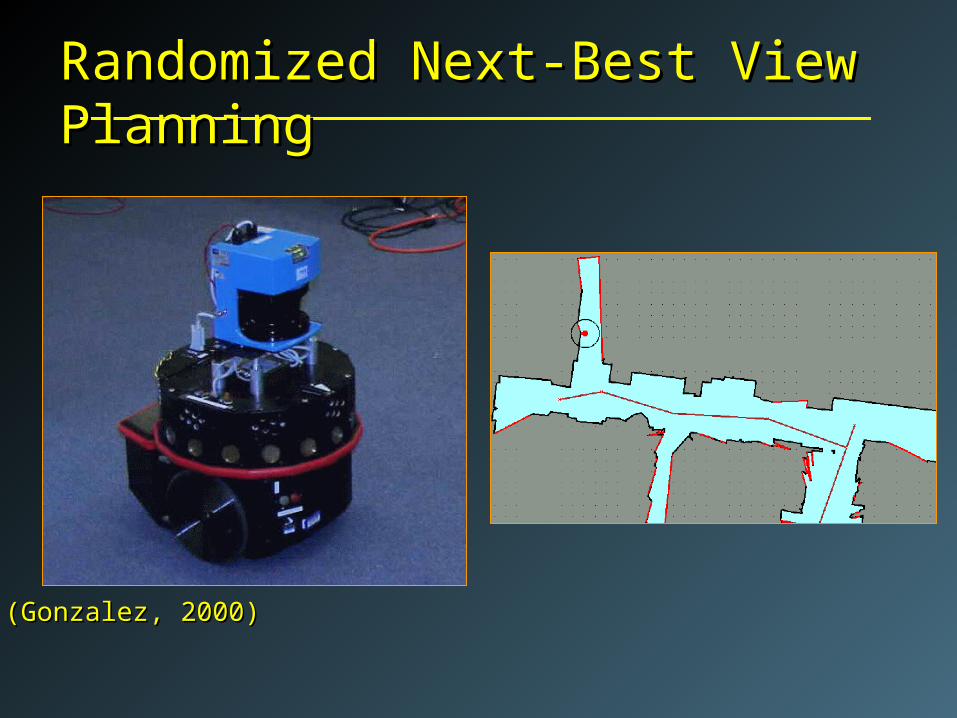
Randomized Next-Best View PlanningRandomized Next-Best View Planning
(Gonzalez, 2000)(Gonzalez, 2000)

Randomized Next-Best View PlanningRandomized Next-Best View Planning
(Gonzalez, 2000)(Gonzalez, 2000)
Randomized Next-Best View PlanningRandomized Next-Best View Planning
(Gonzalez, 2000)(Gonzalez, 2000)
Randomized Next-Best View PlanningRandomized Next-Best View Planning
(Gonzalez, 2000)(Gonzalez, 2000)
OutlineOutline Some historical steps and achievementsSome historical steps and achievements
ApplicationsApplications
Computational approaches:Computational approaches:
– Criticality-based motion planningCriticality-based motion planning
– Random-sampling motion planningRandom-sampling motion planning Some challenging problems aheadSome challenging problems ahead
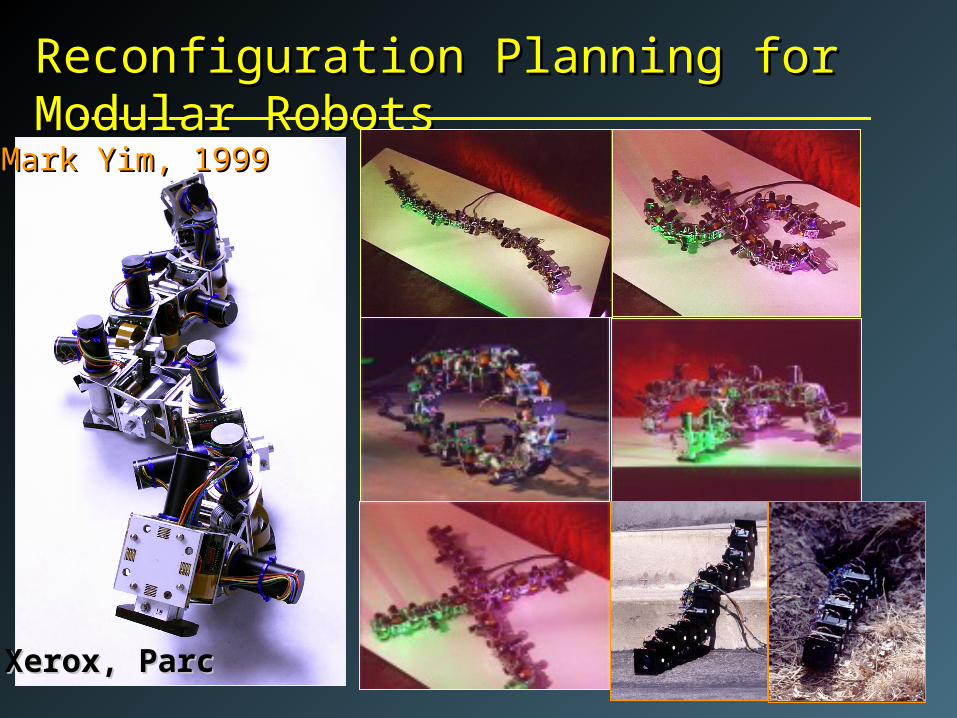
Reconfiguration Planning for Modular RobotsReconfiguration Planning for Modular Robots
Xerox, ParcXerox, Parc
Mark Yim, 1999Mark Yim, 1999

Planning Minimally Invasive SurgeryPlanning Minimally Invasive SurgeryProcedures Amidst Soft Tissue StructuresProcedures Amidst Soft Tissue Structures

Truly Autonomous Interactive Digital Actors Truly Autonomous Interactive Digital Actors with Nice-Looking Motionswith Nice-Looking Motions
A Bug’s Life (Pixar/Disney) Toy Story (Pixar/Disney)
Tomb Raider 3 (Eidos Interactive) Final Fantasy VIII (SquareOne)The Legend of Zelda (Nintendo)
Antz (Dreamworks)

Generating Energetically Plausible Generating Energetically Plausible Docking and Folding Motions of ProteinsDocking and Folding Motions of Proteins
ConclusionConclusion Over the last decade there has been tremendousOver the last decade there has been tremendous
progress in motion planning and its applicationprogress in motion planning and its application Though motion planning originated in robotics, Though motion planning originated in robotics,
applications are now very diverse: design, applications are now very diverse: design, manufacturing, graphic animation, video games, manufacturing, graphic animation, video games, surgery, biology, etc…surgery, biology, etc…
Most future problems in motion planning are Most future problems in motion planning are likely to be motivated by applications that are likely to be motivated by applications that are regarded today as non-robotics applicationsregarded today as non-robotics applications