mp-208:optimal filtering with aerospace applications · 2019-02-18 · mp-208:optimal filtering...
TRANSCRIPT
MP-208: Optimal Filtering with Aerospace ApplicationsChapter 1: Introduction
Davi Antonio dos Santos
Department of MechatronicsInstituto Tecnologico de Aeronautica
Sao Jose dos Campos, BrazilFebruary 2019
1 / 15

Contents
1 Preliminary Definitions
2 History
3 Aerospace Applications
4 Example
2 / 15
Preliminary Defintions: What is filtering?
In classic signal processing:
Filtering is to separate signal and noise by their frequence.
≈ 𝑠(𝑡) 𝑠(𝑡) + 𝑟(𝑡) Filter
Examples:
Low-pass filter, high-pass filter, band-pass filter, and band-rejection filter.
3 / 15

Preliminary Definitions: What is filtering?
In statistical signal processing:
Filtering is to separate signal from noise by their statistical properties. Weare intereseted in this type of filtering!
≈ 𝑠(𝑡) 𝑠(𝑡) + 𝑟(𝑡) Filter
≈ 𝑠(𝑡) ℎ(𝑠(𝑡), 𝑟(𝑡)) Filter
Examples:
Wiener filter, Kolmogorov filter, Kalman filter, Bucy filter, etc.
4 / 15

Preliminary Definitions: What is filtering?
Three types of state estimation: prediction, filtering, and smoothing:
time
time
time
5 / 15
Preliminary Definitions: Why optimal?
Optimal design of filters:
In engineering, we are always interested in optimal solutions.
Here, we are looking for optimality in the following senses:
Minimum mean square error (MMSE).
Maximum a posteriori probability (MAP).
Least squares (LS).
Maximum likelihood (ML).
6 / 15

History
The Optimal Filtering has been constructed in the following sequence:
1795: Johann Carl Friedrich Gauss devised the Least-Squares methodfor estimating the Ceres’ orbit.
1940’s: Wiener/Kolmogorov Filter to separate signal from noise usingthe MMSE criterion. They used a frequecy-domain approach.
1950’s: Attempts to extend Wiener/Kolmogorov filters for non-stationaryand multivariate signals.
1960: Kalman-Bucy Filter was introduced as the new approach totackle and extend the Weiner and Kolmogorov problems for non-stationaryand multivariate signals.
1960-1970: Numerous applications in satellite orbit determination aswell as in attitude determination and navigation of aircrafts, ships,rockets, etc.
7 / 15
History
1960-1970: Optimal Nonlinear Filtering developed from works by Strato-novich (Russia) and consolidated from the works by Kushner (EUA).
1990-: Particle Filters or sequential Monte Carlo methods.
1990-: More approximations of the Kalman filter for nonlinear systems:unscented Kalman filter, cubature Kalman filter, ensemble Kalman fil-ter, etc.
8 / 15

Aerospace Applications
Regarding the dynamic nature of the quantity we want to estimate, we candistinguish between two types of estimation:
Parameter estimation: the parameters are quantities that characterizethe system of interest. Their values are assumed to be constant orsmoothly time-varying.
State estimation: The states are (time-varying) signals that describethe system dynamics.
9 / 15
Aerospace Applications
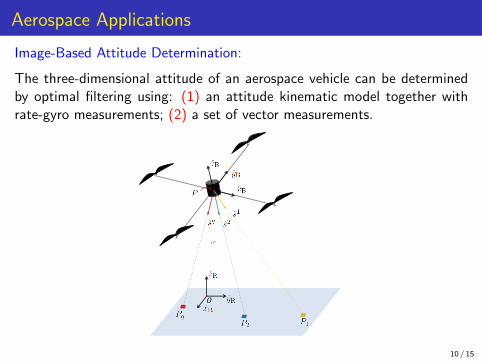
Image-Based Attitude Determination:
The three-dimensional attitude of an aerospace vehicle can be determinedby optimal filtering using: (1) an attitude kinematic model together withrate-gyro measurements; (2) a set of vector measurements.
𝑂
10 / 15
Aerospace Applications
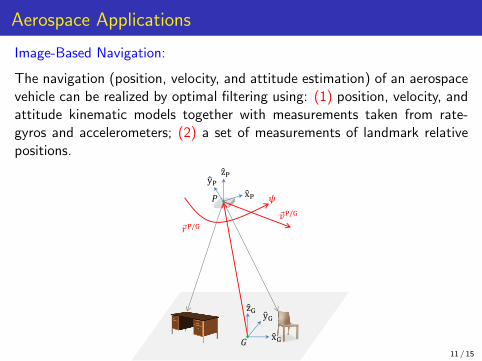
Image-Based Navigation:
The navigation (position, velocity, and attitude estimation) of an aerospacevehicle can be realized by optimal filtering using: (1) position, velocity, andattitude kinematic models together with measurements taken from rate-gyros and accelerometers; (2) a set of measurements of landmark relativepositions.
𝑟 P/G
𝑣 P/G
𝜓
z P y P
x P 𝑃
𝐺
z G
x G
y G
11 / 15
Aerospace Applications
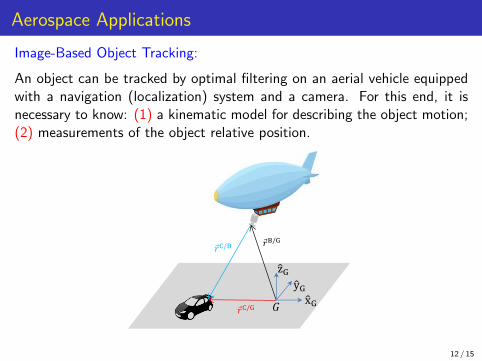
Image-Based Object Tracking:
An object can be tracked by optimal filtering on an aerial vehicle equippedwith a navigation (localization) system and a camera. For this end, it isnecessary to know: (1) a kinematic model for describing the object motion;(2) measurements of the object relative position.
𝑟 C/B
𝐺
z G
x G
y G
𝑟 B/G
𝑟 C/G
12 / 15
Aerospace Applications
In aerospace systems, the most frequent applications of parameter esti-amtion are:
Calibration of navigation sensors.
System identification.
13 / 15
Example
Height and Vertical Velocity Estimation:
Consider an MAV equipped with an ultrasonic sensor for measuring its heighthk at each discrete-time instant k. Assume that the sensor is noise-free anddenote the variable representing its measure at k > 0 by yk .
1 Obtain a dynamic model of the plant in the discrete-time state-spacerepresentation.
2 Design a Luenberger observer, with eigenvalues λ1 = 0.1 and λ2 = 0.1,for estimating the height hk and the vertical velocity hk using themeasurements yk , k > 0.
3 Implement and test the observer using MATLAB script.
14 / 15

References
Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applica-tions to Tracking and Navigation. New York: John Wiley & Sons,2001.
Markley, F. L.; Crassidis, J. L. Fundamentals of Spacecraft AttitudeDetermination and Control. Springer, 2014.
Gelb, A. (Ed) Applied Optimal Estimation. Cambridge: MIT Press,1974.
Jazwinski, A. H. Stochastic Processes and Filtering Theory. NewYork: Dover, 2007.
15 / 15