mp205 lecture 1-2 - maynooth university department … · we will use the cosine form which...
TRANSCRIPT
MathematicalPhysics
MP205 Vibrations and WavesLecture 1 -‐ 2

MP205 Vibrations and Waves
Lecturer: Dr. Jiri Vala
Department of Theoretical Physics
Room 1.9, Science Building, North Campus
Phone: 01-7083553
Email: [email protected]
Tutor: Mr. James Smith
Department of Theoretical Physics
Science Building, North Campus
TUTORIAL SESSIONS: starting the next week (February 5)Option 1: MONDAY 10:05, Hall HOption 2: WEDNESDAY 14:05, Physics Hall

Mon
Tue
Wed
Thu
Fri
9:05 10:05 11:05 12:05 1:05 2:05 3:05 4:05 5:05
L Physics
Hall
T Physics
Hall
T Hall
H
L
CB3

MP205 Vibrations and Waves
Syllabus:Simple harmonic motionSuperposition of periodic motionsForced and damped oscillations and resonanceCoupled oscillators and normal modesVibrations in continuous systems and Fourier analysisTraveling and standing wavesSound and light as transverse and longitudinal wavesDispersion and group velocityBoundary effects and interferenceElementary quantum mechanics

Requirements:Examination (constitutes 80% of the total mark):duration: 120 minutes,requirements: answer all questions and subquestions in writing,maximum mark: 80 points.
Continuous Assessment (20% of the total mark):approximately 10 homework assignments & quizzes in tutorial sessions.

REFERENCES
Lecture notes:online access: http://www.thphys.nuim.ie/Notes/MP205/
Textbooks:A. P. FrenchVibrations and WavesThe M.I.T. Introductory Physics SeriesNorton
I. G. MainVibrations and Waves in PhysicsCambridge University Press
I. PERIODIC MOTIONS
Vibrations and oscillations constitute one of the most important study in all physicsas virtually every system possesses the capability for vibrations.
What these phenomena have in common is
PERIODICITY
i.e. a pattern of movement or displacement that repeats itself over and over again.


Sinusoidal vibrations
Force at a displacement x from equilibrium:
F(x) = −�k1x + k2x2 + k3x3 + ...
�
Assuming the constant k1 >> k2, k3 for some x, the force F(x) is dominated by −k1x.

Sinusoidal vibrations
Force at a displacement x from equilibrium:
F(x) = −�k1x + k2x2 + k3x3 + ...
�
Assuming the constant k1 >> k2, k3 for some x, the force F(x) is dominated by −k1x.
The equation of motion is then given by the Newton law as
md2xdt2= − k1 x (1)
Its solution is the simple harmonic motion (SHM) given by a function
x(t) = A sin�ωt + φ0
�(2)
where ω =�
k1/m is the angular frequency of the periodic motion.

Description of simple harmonic motion (SHM)
x(t) = A sin�ωt + φ0
�ω =
�k/m
Characteristic features of SHM:
• it is confined within x = ±A where A ≥ 0 is the amplitude of the motion;
• the motion has the period T which is the time successive occassions on which
both the displacement x and the velocity v = dx/dt repeat themeselves:
x(t) = A sin�ωt + φ0
� ⇒ ω(t + T ) + φ0 = ωt + φ0 + 2π
whence
T =2πω
(3)

• The situation at t = 0 (or any other time) is completely specified by the values ofx and v = dx/dt at that instant.
For a particular time t = 0, let denote x0 = x|t=0 and v0 = dx/dt|t=0 then
x0 = A sin φ0�⇐ x(t) = A sin
�ωt + φ0
��
v0 = ω A cos φ0
which implies that
A =
�x2
0 +�v0ω
�2�1/2(4)
φ0 = tan−1�ω x0v0
�(5)

Remarks:
• the value of the angular frequency ω is assumed o be known independently;
• the simple harmonic motion of an actual physical system must be long-continued(steady-state vibration) for the equation x(t) = A sin
�ωt + φ0
�to provide an ac-
ceptable description.
A sin(ωt)
A sin(ωt + φ0)
A sin(2ωt)
A sin(ωt/2)
2A sin(ωt)
ω = 8π/5 rad.s-1
φ0 = π/4

Rotating vector representation
SHM can be imagined as the geometric projection of uniform circular motion.
It can thus be described equally well in terms of sine and cosine functions:
A sin�ωt + φ0
�= A cos (ωt + α) = A sin
�ωt + α +
π
2
�⇒ φ0 = α +
π
2We will use the cosine form which connects with the geometric interpretation.


Rotating vectors and complex numbers
The circular motion defines SHM (with A and ω) along any straight line in the plane
of the circle
x(t) = A cos (ωt + α) = r cos θy(t) = A sin (ωt + α) = r sin θ
where r and θ are polar coordinates.
We can write the vector �r = (x(t), y(t)) in complex notation, using i =√−1, as
x(t) + i y(t) = z(t) (6)
The quantity x represents SHM while the quantity y is physically irrelevant.

iy
x

Introducing the complex exponentials
The Taylor series expansion f (x) = f (0) + x f �(0) + x22! f ��(0) + ... of sine and cosine
functions
cos θ = 1 − θ2
2!+θ4
4!+ ...
sin θ = θ − θ3
3!+θ5
5!+ ...
allow us to rewrite cos θ + i sin θ as
cos θ + i sin θ = 1 + iθ − θ2
2!− iθ3
3!+θ4
4!+ ... = 1 + iθ +
(iθ)2
2!+
(iθ)3
3!+
(iθ)4
4!+ ...
cos θ + i sin θ =∞�
n=0
(iθ)n
n!= eiθ (7)

Using the complex exponentials is convenient
a) displacement
x(t) = A cos (ωt + α) = Re(z(t))z(t) = A cos (ωt + α) + iA sin (ωt + α) = A ei(ωt+α) (8)
b) velocity
v(t) =dx(t)
dt=
ddt
[A cos (ωt + α)] = −ωA sin (ωt + α) = Re�dz(t)
dt
�
dz(t)dt
= iωAei(ωt+α) = iωz = −ωA sin (ωt + α) + iωA cos (ωt + α) (9)
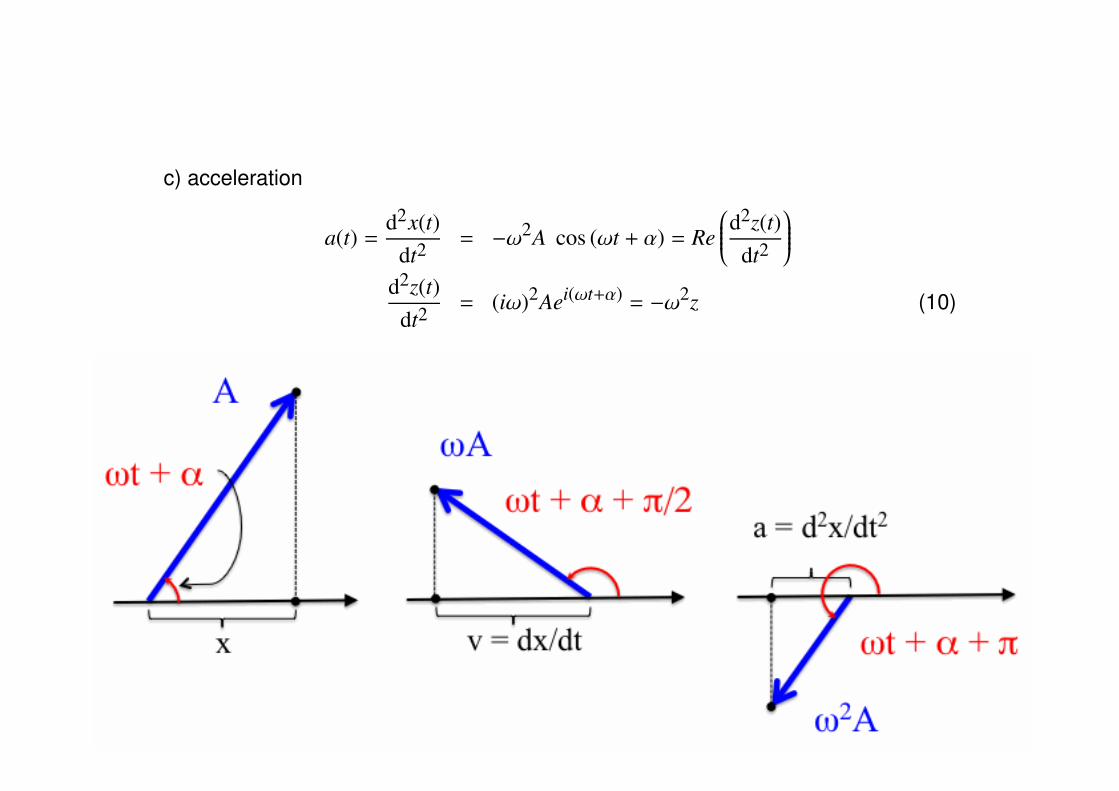
c) acceleration
a(t) =d2x(t)
dt2= −ω2A cos (ωt + α) = Re
d2z(t)
dt2
d2z(t)dt2
= (iω)2Aei(ωt+α) = −ω2z (10)
II. THE SUPERPOSITION OF PERIODIC MOTIONS
Superposed vibrations in one dimension:The resultant of two or more vibrations is the sum of the individual vibrations.
Remarks:Is the displacement produced by two disturbances, acting together, equal to the su-perposition of the displacements as they would occur separately?
Yes or no depending whether or not the displacements is strictly proportional to theforce producing it, i.e. F = md2x
dt2= −kx.
If simple addition holds, the system is said to be linear.

The superposed vibrations of equal frequency
Problem:
We have two SHMs:
x1(t) = A1 cos (ωt + α1)x2(t) = A2 cos (ωt + α2)
and we wish to express their superposition as a single SHM:
x = x1 + x2 = A1 cos (ωt + α1) + A2 cos (ωt + α2)= A cos (ωt + α)

Solution can be obtained in geometric terms using rotating vector representation of
SHM:
OP1 is a rotating vector of length A1 making an angle (ωt + α1) with the axis x at t
OP2 is a rotating vector of length A2 making an angle (ωt + α2).
The sum of these is the vector OP defined by the parallelogram law of vector ad-
dition:
A2 = A
21 + A
22 + 2A1A2 cos (α2 − α1) (1)
where α2 − α1 is the angle between OP1 and P1P.

Derivation:ON : A1 cos(ωt + α1) + A2 cos(ωt + α2)NP : A1 sin(ωt + α1) + A2 sin(ωt + α2)
A2 = A
21 sin2(ωt + α1) + A
22 sin2(ωt + α2) + 2A1A2 sin(ωt + α1) sin(ωt + α2) +
+ A21 cos2(ωt + α1) + A
22 cos2(ωt + α2) + 2A1A2 cos(ωt + α1) cos(ωt + α2)
= A21 + A
22 + 2A1A2 cos (α2 − α1)
where we used the trigonometric identities
sin2 φ + cos2 φ = 1
sin φ sinψ =12�cos (φ − ψ) − cos (φ + ψ)
�
cos φ cosψ =12�cos (φ − ψ) + cos (φ + ψ)
�

Use of complex exponential formalism:
the rotating vectors:
OP1 : z1 = A1 ei(ωt+α1)
OP2 : z2 = A2 ei(ωt+α2)
the resultant:
z = z1 + z2 = A1ei(ωt+α1) + A2 e
i(ωt+α2)
= ei(ωt+α1) �
A1 + A2 ei(α2−α1)�
- a vector of length A2 is to be added at an angle (α2 − α1) to a vector of length A1;- the factor e
i(ωt+α1) tells us that the whole diagram rotates by the angle (ωt + α1).

From the complex formalism, we get the amplitude of the resultant motion
A2 = |z|2 = z z∗
=�ei(ωt+α1) �A1 + A2 ei(α2−α1)�� �e−i(ωt+α1) �A1 + A2 e−i(α2−α1)��
= A21 + A2
2 + 2A1A2 cos (α2 − α1)

Superposed vibrations of the same frequency and amplitude
In general, the values of A and α cannot be further simplified, apart from specialcases.
Special case A1 = A2:
A =�
A21 + A2
1 + 2A1A1 cos (α2 − α1)
= 2A1
�1 + cos (α2 − α1)
2= 2A1 cos
�α2 − α12
�

The situation when
A = 2A1 cos�α2 − α1
2
�= 2A1 cos δ
occurs for example if two identical loudspeakers are driven sinusoidally from thesame signal generator and sound waves are picked up by a microphone at a fairlydistant point.
If the microphone is moved along the line OB, the phase difference δ = α2 − α1increases steadily from the initial value zero at the point O. If the wavelength of thesound waves is shorter than separation of the speakers, the resultant amplitude A
can be observed changing between zero and the maximum 2A1.


We know that oscillations in one dimension can be viewed as the projection of a rotating vector in two dimensions. This means that the superposition of two oscillations can be represented as the addition of two time-dependent complex vectors. The below animation shows this for two oscillations of the same frequency but different amplitudes (one is twice as big as the other) and phases (a difference of ):
Note that the sum -- the red arrow -- does not change its length, so the amplitude of the superposition is constant over time.






The next animation illustrates what happens when the frequencies are different, with one being 3π rad.s-1 and the other being 4π rad.s-1 :
In this case, the length of the sum does vary, so the superposition of the two oscillations produces a time-dependent amplitude.

This phenomenon is called "beating", and is most pronounced when the two frequencies are close together. The below animation shows two oscillations of frequencies ω1 = 6π rad.s-1 and ω2 = 0.8 ω1
, followed by the sum of the two. The result is a "sinewave inside a sinewave". This is the principle behind the amplitude modulation that's used for AM radio.