multidomain design and optimization based on comsol ... · multidomain design and optimization...
TRANSCRIPT

Multidomain Design and Optimization based on COMSOL Multiphysics: Applications for Mechatronic Devices
Ara Bissal, Octavian Craciun, Veronica Biagini, & Jesper Magnusson

Introduction
Methodology
Use of COMSOL Multiphysics
Experimental Verification
Test case
Results
Conclusions
Future work
Table of contents
Month DD, Year | Slide 2
© ABB Group
Due to recent advances in computers Finite Element Method (FEM) based
simulations are becoming a standard prior to designing and prototyping.
Although FEM is very accurate it has several limitations.
COMSOL Multiphysics is an excellent tool that can be used to carry out Multiphysics
simulations.
However, due to the limitation of the FEM, it is a challenge to guarantee convergent
for large parametric studies especial in the presence of nonlinear and or time
dependent studies.
Consequently, a novel smart parallelizable algorithm is developed that overcomes
these presented challenges.
Introduction
Month DD, Year | Slide 3
© ABB Group

Methodology
Month DD, Year | Slide 4
© ABB Group
Requests a token
Gets a unique key identifier
Checks if its siblings also got a
key
Locks token file to
prevent access to its siblings
Gets a token
Starts simulating
the job
If not
If token file is not locked
If token file is locked
Waits
If yes
Parent matlab file starts checks number of available processors on machine
Creates a token file containing all parameters to simulate
Starts children equal to the number of available processors
Each child consists of a Matlab instance with a Comsol server livelink running on one processor
Once all children are initiated and ready for parallel computation, the parent dies to free up memory
Process for child number 1

The process is repeated by all children until the token list is exhausted
The algorithm is smart since it identifies fails simulations cases and takes evasive
action
It is able to tighten the relative and absolute tolerances in stages until it solves
If after 3 stages it fails, it abandons and marks this particular configuration and
requests a new token
Methdology
Month DD, Year | Slide 5
© ABB Group

Used Comsol modules:
Magnetics
Solid mechanics
Moving mesh
Electric circuit
Global ODEs and DAEs
Heat transfer in solids
Weak form PDE
Use of COMSOL Multiphysics
Month DD, Year | Slide 6
© ABB Group
Use of COMSOL Multiphysics
Month DD, Year | Slide 7
© ABB Group

High speed camera 10000 fps
Motion tracking
Good match between simulations
and measurements!
Experimental Verification
Month DD, Year | Slide 8
© ABB Group

The axi-symmetric model of the TC
shown to the right
Chosen variables are:
Capacitance
Charging voltage
Number of turns
20,520 simulations
Parallelized on 4 CPUS
Solving time: 7 weeks.
If computed serially, this would take
more than half a year.
Test case
Month DD, Year | Slide 9
© ABB Group
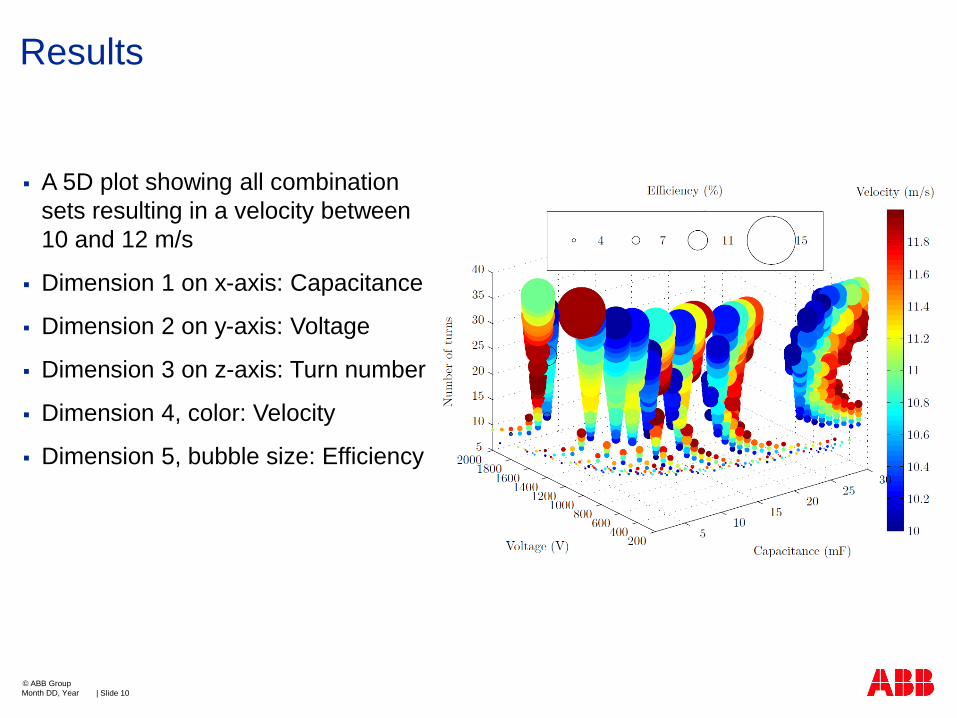
A 5D plot showing all combination
sets resulting in a velocity between
10 and 12 m/s
Dimension 1 on x-axis: Capacitance
Dimension 2 on y-axis: Voltage
Dimension 3 on z-axis: Turn number
Dimension 4, color: Velocity
Dimension 5, bubble size: Efficiency
Results
Month DD, Year | Slide 10
© ABB Group

Results
Month DD, Year | Slide 11
© ABB Group

A 5D plot showing all combination
sets resulting in a velocity between
10 and 12 m/s
Dimension 1 on x-axis: Capacitance
Dimension 2 on y-axis: Voltage
Dimension 3 on z-axis: Turn number
Dimension 4, color: Velocity
Dimension 5, bubble size: Energy
Results
Month DD, Year | Slide 12
© ABB Group

Smart and parallelizable algorithm
Increase in speed almost proportional to the number of parallel instances
This algorithm is still at its infancy
A dedicated multi-objective optimization algorithm will also be incorporated
Coupling such a tool with COMSOL Multiphysics opens up a new frontier enabling
fast and automated prototyping
This significantly speeds up the chain from ideas to products
Conclusions & Future work
Month DD, Year | Slide 13
© ABB Group
Questions?