new castle design associates design review of insect video tracking device april 23, 1999 team 5...
TRANSCRIPT

New Castle Design Associates
Design Review of Insect Video Tracking Device
April 23, 1999
Team 5
Sponsor: Keith Hopper, USDA & UD
The Staff
Ryan S. McDonough
Raymond M. Foulk IV Justin L. Combs
George H. Sapna III

Background
• $100 million crop damage each year due to pests
• Introduction of beneficial (predatory) insects into environment
• Study of reproductive habits - Aphelinus asychis
• Want insect position as a function of time.

Problem DescriptionExisting System: Measures insect movements
within a small arena
Specimens
Camera
Computer
Problem: Confinement disturbs the behavior of the insects

Summary
Mission: Our mission is to design, construct, and refine an insect video tracking system for agricultural research that provides our customers with a creative, realistic and performance-based solution.
Approach: Our strategy will be to gain an overall knowledge of the project and then to strive for a solution by researching, benchmarking, and defining the customer’s wants and constraints. Finally, using an iterative design synthesis process, our team will generate the best solution to satisfy our customers.

Customers WantsCustomers Wants
Keith Hopper large area, position/speed, not disturb insect, track for 20 min., existing equipment, C++, minimize post pro., wireless device, interchange camera
Mike Smith position/speed, minimize post pro, various conditions, reduce pesticides
Richard Turcotte adaptable to other insects, not disturb insect, simple interface, large area, position/speed

Top 10 Wants
• Measure position and speed of the insect
• Track the insect over large area
• Adaptability to other types of insects
• Minimize post-processing of data
• Not to disturb the insect’s behavior
• Easy-to-learn user interface
• Ability to record for 10 - 20 minutes
• Use existing equipment
• Benefits must outweigh costs
• Preferred language is C/C++

Constraints
• Project must be completed by May 1999
• Project expenses must remain below $3500
• Must cover a larger area than existing system
• Work area must occupy only Stearns Lab

Benchmarking
• Existing Video Tracking System
• Motion Control Systems
• Linear Motion Systems
• Motion Actuators
• Control Algorithms
• Image Processing

Position/speed X,Y coordinates of insectsInstantaneous errorAccumulation of errorMaximum speed of motion
Large area Size of tracking area
Adaptability to other insects Insect size rangeMaximum speed of motion
Minimize post-processing Total acquisition timeFrequency of acquisitionFeedback delay
Do not disturb insect Distance from device to insectSmoothness of surfaceVariation in luminance
Wants Metrics
Wants Metrics

Wants Metrics
Simple user interface Desired programming languageUser friendly
Record for 10 - 20 min. Total acquisition timeFrequency of acquisitionFeedback delay
Use existing equipment Amount of existing equipment used
Benefits outweigh costs Savings/Costs
C/C++ Programming language
Wants Metrics
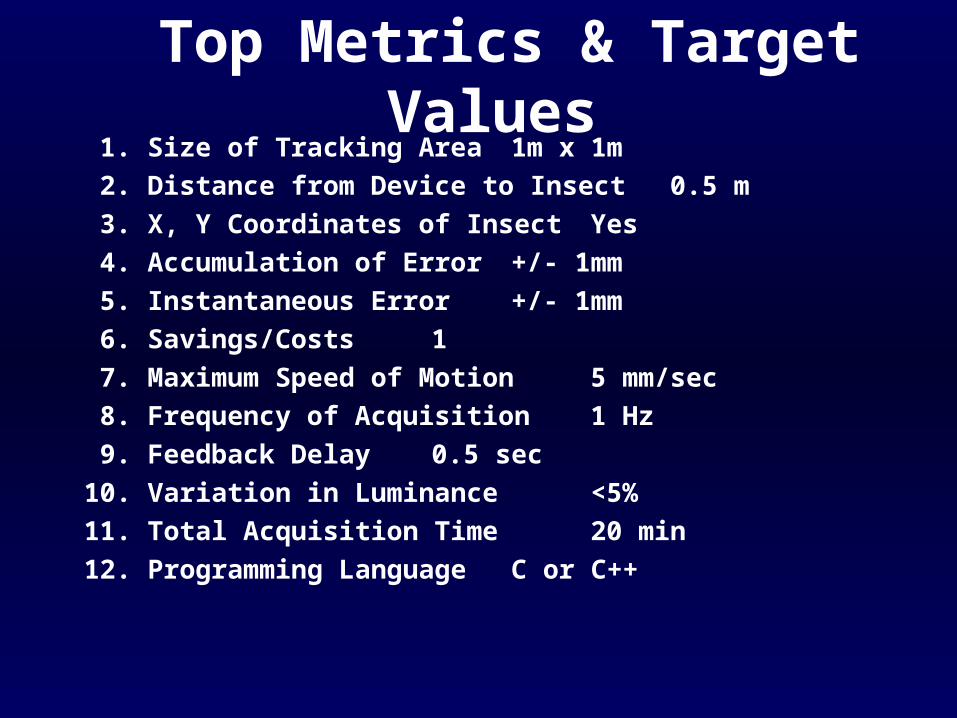
Top Metrics & Target Values 1. Size of Tracking Area 1m x 1m
2. Distance from Device to Insect 0.5 m
3. X, Y Coordinates of Insect Yes
4. Accumulation of Error +/- 1mm
5. Instantaneous Error +/- 1mm
6. Savings/Costs 1
7. Maximum Speed of Motion 5 mm/sec
8. Frequency of Acquisition 1 Hz
9. Feedback Delay 0.5 sec
10. Variation in Luminance <5%
11. Total Acquisition Time 20 min
12. Programming Language C or C++
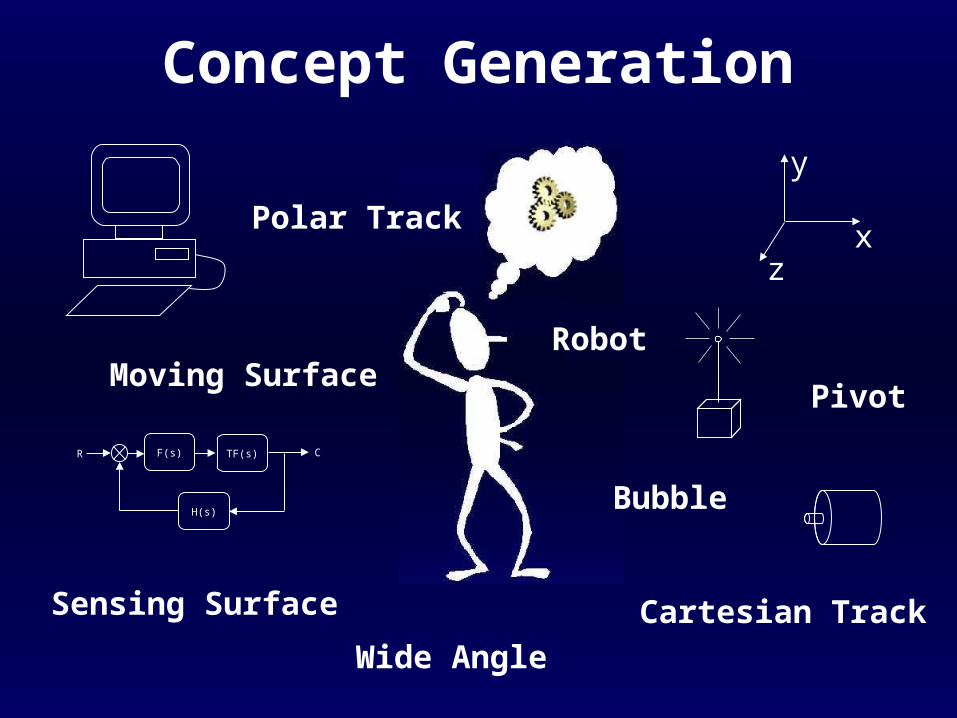
Concept Generation
x
y
z
F(s) TF(s)
H(s)
R C
Cartesian Track
Polar Track
Sensing Surface
Robot
Wide Angle
PivotMoving Surface
Bubble
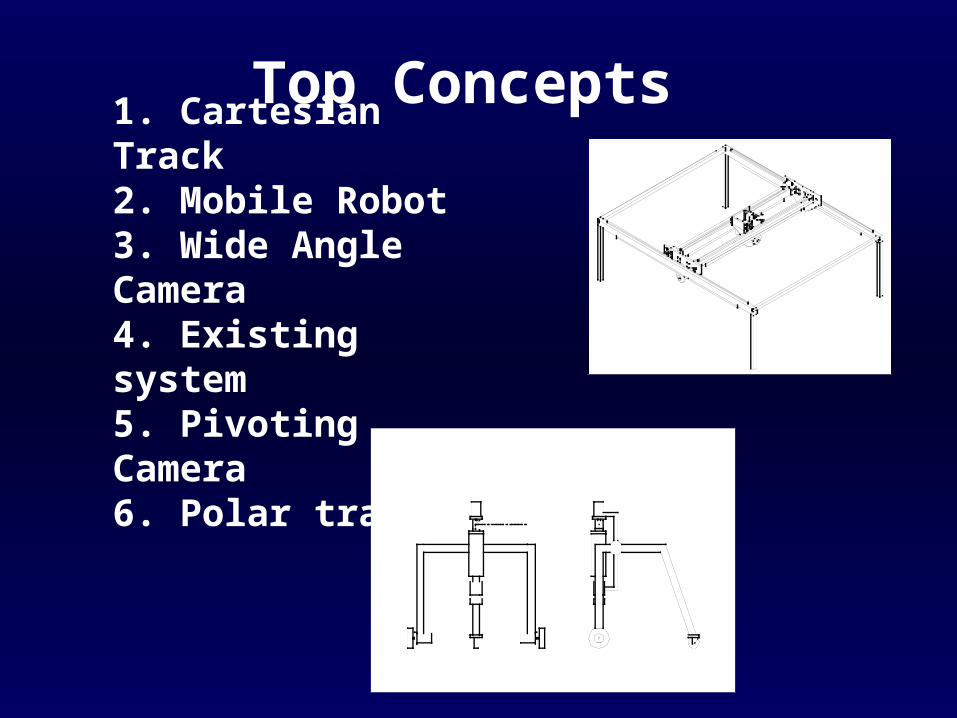
Top Concepts
1. Cartesian Track2. Mobile Robot3. Wide Angle Camera4. Existing system5. Pivoting Camera6. Polar track

Development Process
• How do we move the camera around to follow the insect?
• How do we recognize the insect from the camera?
• How do we tell the motion system to follow the insect?
• How do we get the position of the insect?
Development of the Motion System
Geometry and StructureFootprint Area
Beam Bending
Torsional Deflection
Camera Mounting
Positional RequirementsRack and Pinion Design Requirements
Motor Torque Requirements
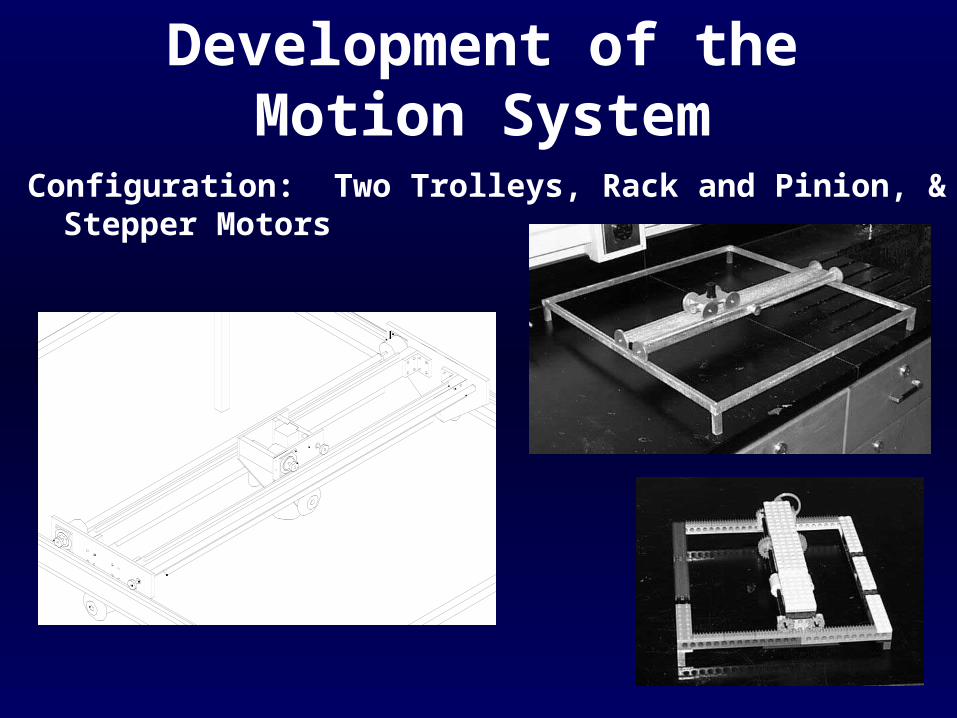
Development of the Motion System
Configuration: Two Trolleys, Rack and Pinion, & Stepper Motors

Development of the Motion System - X Trolley

Development of the Motion System - Y Trolley

Development of the Image Processing Algorithm
• Capture a Black and White Digital Picture
• The Insect Is Much Darker Than the Background
• Take the Derivative of the Image
• Isolate Pixels With Darkness Above A Threshold
• Average Pixel Array Coordinates to get the Center of the High Contrast Region

Taking the Derivative of an Image and Finding the Center

Development of the Motion Control Algorithm
• Keep the Bug in the Middle of the Screen
• Respond Proportionally to Bug Movements
• Avoid Unnecessary Movement

Motion Control Algorithm
Speed and Acceleration Increase as the Bug Moves Away from the Center of the Action
Circle
Bug Must Walk Outside of Action Circle
Sensitivity (Slope of Cone)
Gain
Distance from Center

Development of the Insect Position Algorithm
• Keep Track of Screen Coordinates of the Insect• Keep Track of Base Frame Coordinates of the
Camera• Add the Positions Together• Write the Absolute Position to a Data File

Insect Position
Camera Screen Coordinates, [ xS yS ]
Base Frame Coordinates, [ xB yB ]
Insect Coordinates = [ (xB+ xS) (yB+yS) ]
Keep Track of Motor Rotations
Keep Track of Pixel Location of Insect

Main Computer
ImageAnalysis
MotionControl
Algorithm
StepperController
InsectPosition
Calculator,Display, &Recorder
Digital
Camera
X-Motor
Y-Motors
Motor
Positions
Integrated System Components

Integrated System Components

Prototype Costs
Shop Fabrication: 212.5 hours ($9585)
Engineering Development: 1100 hours ($11000)
Assembly Time: 25 hours ($250)
Rack and Pinion Sets: $799.13
Motors and Controllers: $514.00
Stock Aluminum: $553.22
Software: $495.00
Other Parts: $517.07
Shipping: $184.15
TOTAL SPENT: $3062.57

5 Important Prototype Tests Metric #1: Size of Tracking Area (Target: 1m x 1m)
Test #1: Measure Limits of Tracking Area
Metric #2: Distance from Device to Insect (Target: 0.5 m)
Test #2: Measure Distance From Bottom of Camera to Substrate
Metric #3: X, Y Coordinates of Insect (Target: Yes)
Test #3: Did the System Behave As Expected?
Metric #4: Accumulation of Error (Target: +/- 1mm
Test #4: Measure Distance Between Two Points Repeatedly
Metric #5: Instantaneous Error (Target: +/- 1mm)
Test #5: Measure Largest Static Amplitude

Test Results
1 Size of Tracking Area 1 square meter 0.96 square meter pass2 Distance: Device to Object 0.5 Meter 0.505 Meter pass3 X-Y Coordinates yes yes pass
4 Accumulation of Error +/- 1mm +/- 0.99mm pass5 Instantaneous Error +/- 1mm +/- 0.23mm pass6 Savings/Cost 1 0.77 pass7 Maximum Speed of Motion 5 mm/s >27 mm/s pass8 Frequency of Acquisition 1 Hz 2-5 Hz pass9 Feedback Delay <0.5 s 0.07 s pass
10 Variation in Luminance <5% 14.88% fail11 Total Acquisition Time 20 min 25.3 min pass12 Desired Programming Language C or C++ C pass
Pass/FailMetric Rank Metric Correlation Target Value Test Results

Modifications To Original Design • Added Limit Switches
• Added Shaft Support Bearings
• Added Cosmetic Features (wire clamps, etc.)
• Improved User Interface

Demonstration

Actual Data From An Insect

Recommendations For Improvement
•Use Servo Motors to Reduce Motor Vibrations
•Bolt Legs to Table
•Stiffen Legs to Reduce Frequency of Vibrations
•Replace Computer With Faster Model
•Create a Windows-Based Interface

