nonlinear matrix equations and structured linear algebra
TRANSCRIPT
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Nonlinear matrix equations and structured linearalgebra
Beatrice Meini
Dipartimento di Matematica, Universita di Pisa, Italy
11th ILAS Conference, Coimbra, July 19–22, 2004
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Some classes of matrix equations
1 Power series matrix equations: X = A−1 + A0X + A1X2 + · · ·
MotivationTheoretical propertiesAlgorithms
2 Quadratic matrix equations: X = A−1 + A0X + A1X2
Quasi-Birth-Death processes“Non-Markovian” matrix equations
3 Matrix pth root: X p = AMatrix sign functionInverse of a matrix Laurent polynomial
4 DARE-type matrix equations: X = C +∑d
i=1 AiX−1Bi
MotivationAlgorithms
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Some classes of matrix equations
1 Power series matrix equations: X = A−1 + A0X + A1X2 + · · ·
MotivationTheoretical propertiesAlgorithms
2 Quadratic matrix equations: X = A−1 + A0X + A1X2
Quasi-Birth-Death processes“Non-Markovian” matrix equations
3 Matrix pth root: X p = AMatrix sign functionInverse of a matrix Laurent polynomial
4 DARE-type matrix equations: X = C +∑d
i=1 AiX−1Bi
MotivationAlgorithms
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Some classes of matrix equations
1 Power series matrix equations: X = A−1 + A0X + A1X2 + · · ·
MotivationTheoretical propertiesAlgorithms
2 Quadratic matrix equations: X = A−1 + A0X + A1X2
Quasi-Birth-Death processes“Non-Markovian” matrix equations
3 Matrix pth root: X p = AMatrix sign functionInverse of a matrix Laurent polynomial
4 DARE-type matrix equations: X = C +∑d
i=1 AiX−1Bi
MotivationAlgorithms
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Some classes of matrix equations
1 Power series matrix equations: X = A−1 + A0X + A1X2 + · · ·
MotivationTheoretical propertiesAlgorithms
2 Quadratic matrix equations: X = A−1 + A0X + A1X2
Quasi-Birth-Death processes“Non-Markovian” matrix equations
3 Matrix pth root: X p = AMatrix sign functionInverse of a matrix Laurent polynomial
4 DARE-type matrix equations: X = C +∑d
i=1 AiX−1Bi
MotivationAlgorithms
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
Some classes of matrix equations
1 Power series matrix equations: X = A−1 + A0X + A1X2 + · · ·
MotivationTheoretical propertiesAlgorithms
2 Quadratic matrix equations: X = A−1 + A0X + A1X2
Quasi-Birth-Death processes“Non-Markovian” matrix equations
3 Matrix pth root: X p = AMatrix sign functionInverse of a matrix Laurent polynomial
4 DARE-type matrix equations: X = C +∑d
i=1 AiX−1Bi
MotivationAlgorithms
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
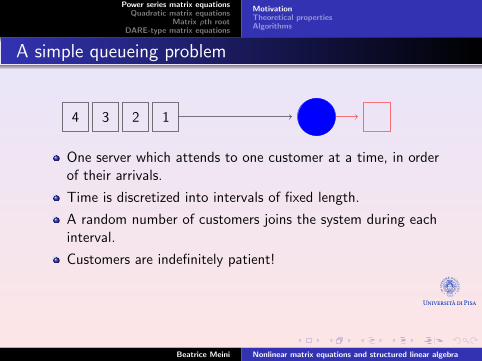
A simple queueing problem
4 3 2 1
One server which attends to one customer at a time, in orderof their arrivals.
Time is discretized into intervals of fixed length.
A random number of customers joins the system during eachinterval.
Customers are indefinitely patient!
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
A simple queueing problem
Define:
αn: the number of new arrivals in (n − 1, n);Xn: the number of customers in the system at time n.
Then
Xn+1 =
{Xn + αn+1 − 1 if Xn + αn+1 ≥ 1
0 if Xn + αn+1 = 0.
If {αn} are independent random variables, then {Xn} is aMarkov chain with space state N.
If in addition the αn’s are identically distributed, then{Xn} is homogeneous.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
A simple queueing problem
Define:
αn: the number of new arrivals in (n − 1, n);Xn: the number of customers in the system at time n.
Then
Xn+1 =
{Xn + αn+1 − 1 if Xn + αn+1 ≥ 1
0 if Xn + αn+1 = 0.
If {αn} are independent random variables, then {Xn} is aMarkov chain with space state N.
If in addition the αn’s are identically distributed, then{Xn} is homogeneous.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
A simple queueing problem
Define:
αn: the number of new arrivals in (n − 1, n);Xn: the number of customers in the system at time n.
Then
Xn+1 =
{Xn + αn+1 − 1 if Xn + αn+1 ≥ 1
0 if Xn + αn+1 = 0.
If {αn} are independent random variables, then {Xn} is aMarkov chain with space state N.
If in addition the αn’s are identically distributed, then{Xn} is homogeneous.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
A simple queueing problem
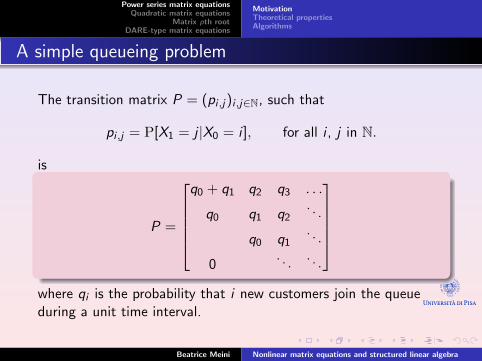
The transition matrix P = (pi ,j)i ,j∈N, such that
pi ,j = P[X1 = j |X0 = i ], for all i , j in N.
is
P =
q0 + q1 q2 q3 . . .
q0 q1 q2. . .
q0 q1. . .
0. . .
. . .
where qi is the probability that i new customers join the queueduring a unit time interval.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
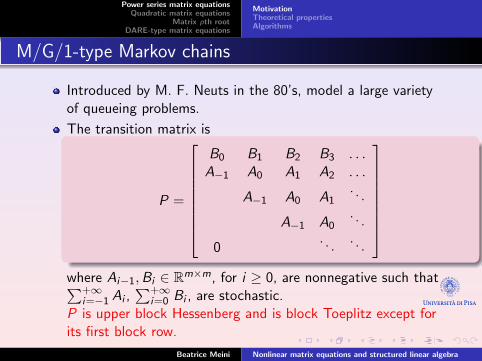
M/G/1-type Markov chains
Introduced by M. F. Neuts in the 80’s, model a large varietyof queueing problems.
The transition matrix is
P =
B0 B1 B2 B3 . . .A−1 A0 A1 A2 . . .
A−1 A0 A1. . .
A−1 A0. . .
0. . .
. . .
where Ai−1,Bi ∈ Rm×m, for i ≥ 0, are nonnegative such that∑+∞
i=−1 Ai ,∑+∞
i=0 Bi , are stochastic.P is upper block Hessenberg and is block Toeplitz except forits first block row.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
M/G/1-type Markov chains
The computation of performance measures of the queueing model(stationary vector, mean waiting time, etc.) is ultimately reducedto the computation of the minimal component-wise solution G ,among the nonnegative solutions, of
X = A−1 + A0X + A1X2 + · · ·
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
Some properties of G
Let S(z) = zI −∑+∞
i=−1 z i+1Ai .If the M/G/1-type Markov chain is positive recurrent, then:
G is row stochastic.
det S(z) has exactly m zeros in the closed unit disk.
The eigenvalues of G are the zeros of det S(z) in the closedunit disk.
Therefore G is the minimal solvent (Gohberg, Lancaster, Rodman’82)
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
Some properties of G
Let S(z) = zI −∑+∞
i=−1 z i+1Ai .If the M/G/1-type Markov chain is positive recurrent, then:
G is row stochastic.
det S(z) has exactly m zeros in the closed unit disk.
The eigenvalues of G are the zeros of det S(z) in the closedunit disk.
Therefore G is the minimal solvent (Gohberg, Lancaster, Rodman’82)
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
Some properties of S(z)
The power series S(z) = zI −∑+∞
i=−1 z i+1Ai belongs to theWiener algebra W , therefore it is analytic for |z | < 1,continuous for |z | = 1.
Under some mild additional assumptions S(z) is analytic for|z | < r , where r > 1, and there exists a smallest modulus zeroξ of det S(z) such that 1 < |ξ| < r .
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
Some properties of G
The function φ(z) = I −∑+∞
i=−1 z iAi has a weak canonicalfactorization in W
φ(z) =(I −
+∞∑i=0
z iUi
)(I − z−1G ), |z | = 1,
where:
U(z) = I −∑+∞
i=0 z iUi is analytic for |z | < 1, det U(z) 6= 0 for|z | ≤ 1;
L(z) = I − z−1G is analytic for |z | > 1, det L(z) 6= 0 for|z | > 1, det L(1) = 0.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
Some properties of G
The function φ(z) = I −∑+∞
i=−1 z iAi has a weak canonicalfactorization in W
φ(z) =(I −
+∞∑i=0
z iUi
)(I − z−1G ), |z | = 1,
where:
U(z) = I −∑+∞
i=0 z iUi is analytic for |z | < 1, det U(z) 6= 0 for|z | ≤ 1;
L(z) = I − z−1G is analytic for |z | > 1, det L(z) 6= 0 for|z | > 1, det L(1) = 0.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
Some properties of G
The function φ(z) = I −∑+∞
i=−1 z iAi has a weak canonicalfactorization in W
φ(z) =(I −
+∞∑i=0
z iUi
)(I − z−1G ), |z | = 1,
where:
U(z) = I −∑+∞
i=0 z iUi is analytic for |z | < 1, det U(z) 6= 0 for|z | ≤ 1;
L(z) = I − z−1G is analytic for |z | > 1, det L(z) 6= 0 for|z | > 1, det L(1) = 0.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
Functional iterations
Natural iteration{Xn+1 =
∑+∞i=−1 AiX
i+1n , n ≥ 0
X0 = 0
History Several variants proposed by Neuts (’81, ’89),Ramaswami (’88), Latouche (’93), Bai (’97).
Convergence Convergence analysis performed by Meini (’97), Guo(’99). Convergence is linear, and for some problemsit may be extremely slow.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
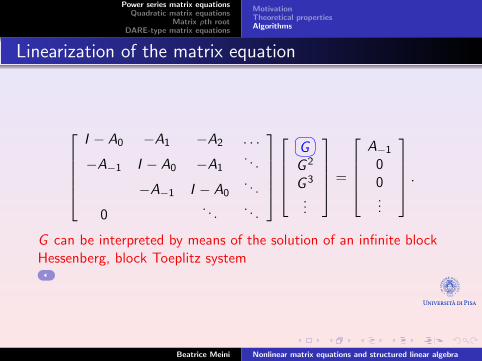
Linearization of the matrix equation
I − A0 −A1 −A2 . . .
−A−1 I − A0 −A1. . .
−A−1 I − A0. . .
0. . .
. . .
�� ��GG 2
G 3
...
=
A−1
00...
.
G can be interpreted by means of the solution of an infinite blockHessenberg, block Toeplitz system
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
Cyclic reduction: history
Introduced in the late ’60s by Buzbee, Golub and Nielson forsolving block tridiagonal systems in the context of ellipticequations.
Stability and convergence properties: Amodio and Mazzia(’94), Yalamov (’95), Yalamov and Pavlov (’96), etc.
Rediscovered by Latouche and Ramaswami (Logarithmicreduction) in the context of Markov chains (’93);
Extended to infinite block Hessenberg, block Toeplitz systemsby Bini and Meini (starting from ’96).
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
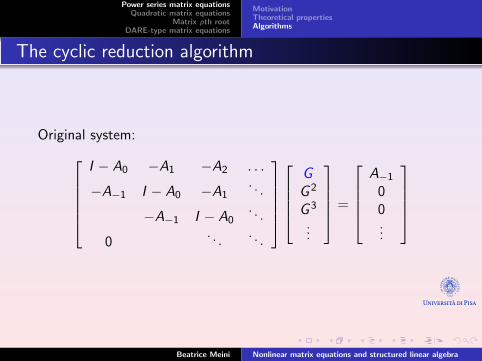
The cyclic reduction algorithm
Original system:I − A0 −A1 −A2 . . .
−A−1 I − A0 −A1. . .
−A−1 I − A0. . .
0. . .
. . .
GG 2
G 3
...
=
A−1
00...
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
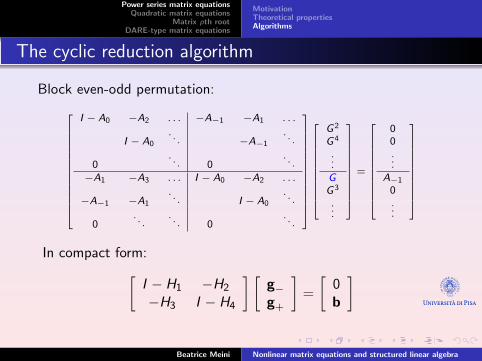
The cyclic reduction algorithm
Block even-odd permutation:
I − A0 −A2 . . . −A−1 −A1 . . .
I − A0
. . . −A−1
. . .
0. . . 0
. . .
−A1 −A3 . . . I − A0 −A2 . . .
−A−1 −A1
. . . I − A0
. . .
0. . .
. . . 0. . .
G2
G4
...GG3
...
=
00...
A−1
0...
In compact form:[I − H1 −H2
−H3 I − H4
] [g−g+
]=
[0b
]
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
The cyclic reduction algorithm
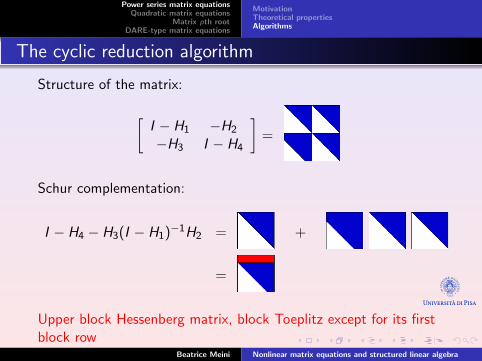
Structure of the matrix:
[I − H1 −H2
−H3 I − H4
]=
Schur complementation:
I − H4 − H3(I − H1)−1H2 = +
=
Upper block Hessenberg matrix, block Toeplitz except for its firstblock row
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
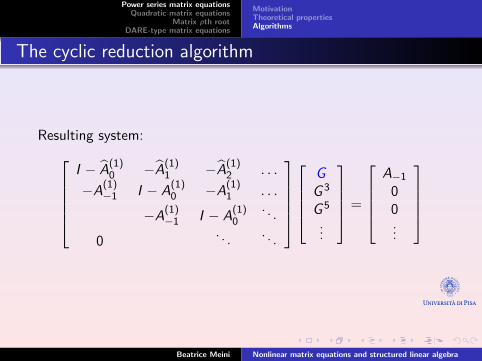
The cyclic reduction algorithm
Resulting system:I − A
(1)0 −A
(1)1 −A
(1)2 . . .
−A(1)−1 I − A
(1)0 −A
(1)1 . . .
−A(1)−1 I − A
(1)0
. . .
0. . .
. . .
GG 3
G 5
...
=
A−1
00...
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
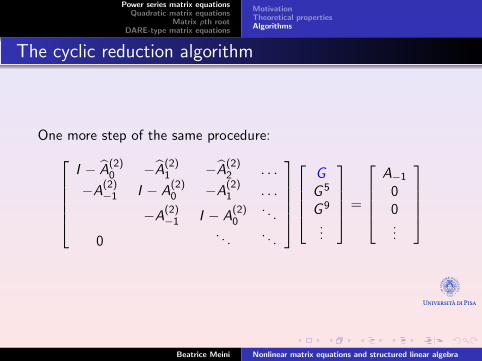
The cyclic reduction algorithm
One more step of the same procedure:I − A
(2)0 −A
(2)1 −A
(2)2 . . .
−A(2)−1 I − A
(2)0 −A
(2)1 . . .
−A(2)−1 I − A
(2)0
. . .
0. . .
. . .
GG 5
G 9
...
=
A−1
00...
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
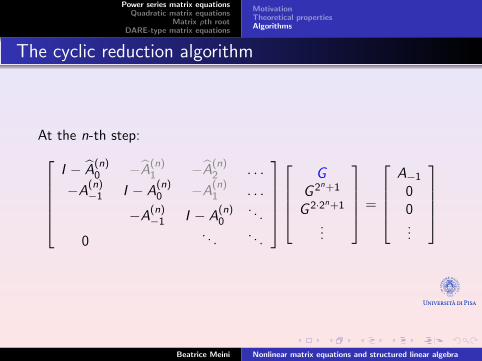
The cyclic reduction algorithm
At the n-th step:I − A
(n)0 −A
(n)1 −A
(n)2 . . .
−A(n)−1 I − A
(n)0 −A
(n)1 . . .
−A(n)−1 I − A
(n)0
. . .
0. . .
. . .
GG 2n+1
G 2·2n+1
...
=
A−1
00...
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
The cyclic reduction algorithm
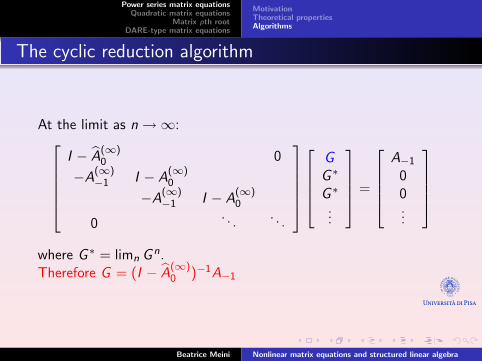
At the limit as n →∞:I − A
(∞)0 0
−A(∞)−1 I − A
(∞)0
−A(∞)−1 I − A
(∞)0
0. . .
. . .
GG ∗
G ∗
...
=
A−1
00...
where G ∗ = limn Gn.Therefore G = (I − A
(∞)0 )−1A−1
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
The cyclic reduction algorithm
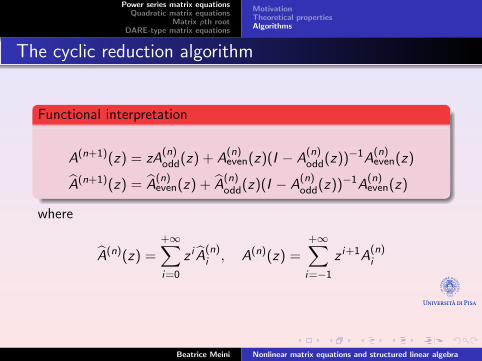
Functional interpretation
A(n+1)(z) = zA(n)odd(z) + A
(n)even(z)(I − A
(n)odd(z))−1A
(n)even(z)
A(n+1)(z) = A(n)even(z) + A
(n)odd(z)(I − A
(n)odd(z))−1A
(n)even(z)
where
A(n)(z) =+∞∑i=0
z i A(n)i , A(n)(z) =
+∞∑i=−1
z i+1A(n)i
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
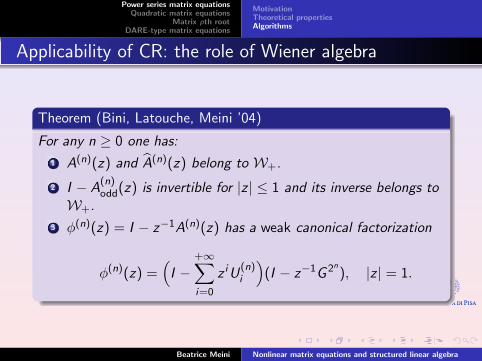
Applicability of CR: the role of Wiener algebra
Theorem (Bini, Latouche, Meini ’04)
For any n ≥ 0 one has:
1 A(n)(z) and A(n)(z) belong to W+.
2 I − A(n)odd(z) is invertible for |z | ≤ 1 and its inverse belongs to
W+.
3 φ(n)(z) = I − z−1A(n)(z) has a weak canonical factorization
φ(n)(z) =(I −
+∞∑i=0
z iU(n)i
)(I − z−1G 2n
), |z | = 1.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
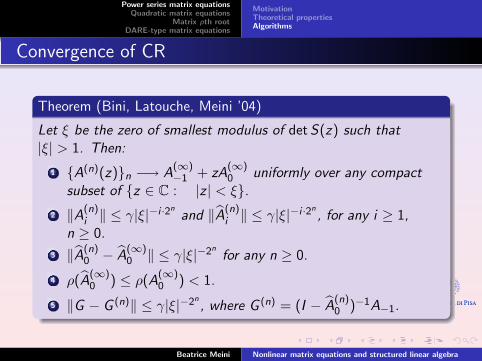
Convergence of CR
Theorem (Bini, Latouche, Meini ’04)
Let ξ be the zero of smallest modulus of det S(z) such that|ξ| > 1. Then:
1 {A(n)(z)}n −→ A(∞)−1 + zA
(∞)0 uniformly over any compact
subset of {z ∈ C : |z | < ξ}.2 ‖A(n)
i ‖ ≤ γ|ξ|−i ·2nand ‖A(n)
i ‖ ≤ γ|ξ|−i ·2n, for any i ≥ 1,
n ≥ 0.
3 ‖A(n)0 − A
(∞)0 ‖ ≤ γ|ξ|−2n
for any n ≥ 0.
4 ρ(A(∞)0 ) ≤ ρ(A
(∞)0 ) < 1.
5 ‖G − G (n)‖ ≤ γ|ξ|−2n, where G (n) = (I − A
(n)0 )−1A−1.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
Computational issues
The matrix power series A(n)(z), A(n)(z) are approximated bymatrix polynomials of degree at most dn.
The computation of such matrix polynomials by means ofevaluation/iterpolation at the roots of unity can be performed in
O(m3dn + m2dn log dn)
arithmetic operations
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
Doubling method
History Introduced by W.J. Stewart (’95) to solve generalblock Hessenberg systems, applied by Latouche andStewart (’95) for computing G , improved by Bini andMeini (’98) by exploiting the Toeplitz structure ofthe block Hessenberg matrices.
Idea Successively solve finite block Hessenberg systems ofblock size which doubles at each iterative step.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
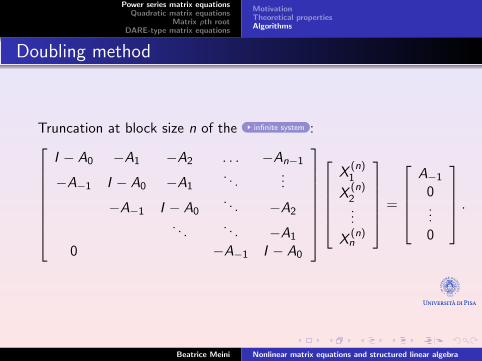
Doubling method
Truncation at block size n of the infinite system :
I − A0 −A1 −A2 . . . −An−1
−A−1 I − A0 −A1. . .
...
−A−1 I − A0. . . −A2
. . .. . . −A1
0 −A−1 I − A0
X
(n)1
X(n)2...
X(n)n
=
A−1
0...0
.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
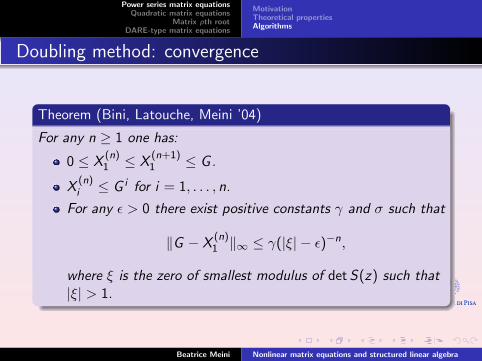
Doubling method: convergence
Theorem (Bini, Latouche, Meini ’04)
For any n ≥ 1 one has:
0 ≤ X(n)1 ≤ X
(n+1)1 ≤ G.
X(n)i ≤ G i for i = 1, . . . , n.
For any ε > 0 there exist positive constants γ and σ such that
‖G − X(n)1 ‖∞ ≤ γ(|ξ| − ε)−n,
where ξ is the zero of smallest modulus of det S(z) such that|ξ| > 1.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationTheoretical propertiesAlgorithms
Doubling method: algorithm
The algorithm consists in successively solving systems of block size2, 4, 8, 16, . . . .
Size doubling at each step =⇒ Quadratic convergence
Use of FFT and Toeplitz structure =⇒ The 2n × 2n blocksystem can be solved in O(m32n + m2n2n) arithmeticoperations.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Quasi-Birth-Death processes“Non-Markovian” matrix equations
Some classes of matrix equations
1 Power series matrix equations: X = A−1 + A0X + A1X2 + · · ·
MotivationTheoretical propertiesAlgorithms
2 Quadratic matrix equations: X = A−1 + A0X + A1X2
Quasi-Birth-Death processes“Non-Markovian” matrix equations
3 Matrix pth root: X p = AMatrix sign functionInverse of a matrix Laurent polynomial
4 DARE-type matrix equations: X = C +∑d
i=1 AiX−1Bi
MotivationAlgorithms
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Quasi-Birth-Death processes“Non-Markovian” matrix equations
Quasi-Birth-Death processes
If Ai = 0 for i > 1 the M/G/1-type Markov chain is called aQuasi-Birth-Death process (QBD).
Problem
Computation of the minimal component-wise solution G , among thenonnegative solutions, of
X = A−1 + A0X + A1X2
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Quasi-Birth-Death processes“Non-Markovian” matrix equations
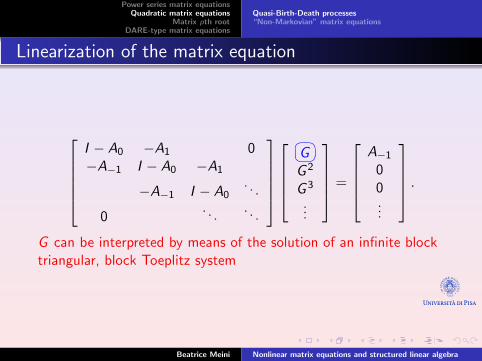
Linearization of the matrix equation
I − A0 −A1 0−A−1 I − A0 −A1
−A−1 I − A0. . .
0. . .
. . .
�� ��GG 2
G 3
...
=
A−1
00...
.
G can be interpreted by means of the solution of an infinite blocktriangular, block Toeplitz system
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Quasi-Birth-Death processes“Non-Markovian” matrix equations
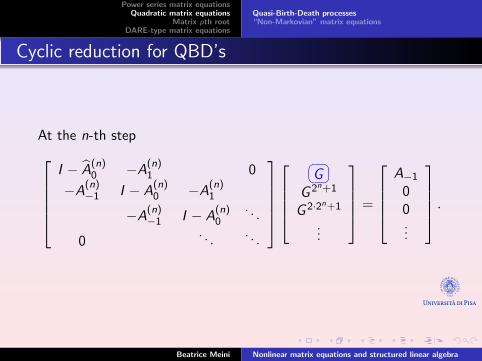
Cyclic reduction for QBD’s
At the n-th stepI − A
(n)0 −A
(n)1 0
−A(n)−1 I − A
(n)0 −A
(n)1
−A(n)−1 I − A
(n)0
. . .
0. . .
. . .
�� ��GG 2n+1
G 2·2n+1
...
=
A−1
00...
.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Quasi-Birth-Death processes“Non-Markovian” matrix equations
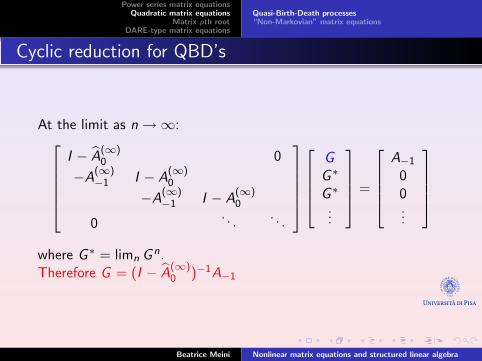
Cyclic reduction for QBD’s
At the limit as n →∞:I − A
(∞)0 0
−A(∞)−1 I − A
(∞)0
−A(∞)−1 I − A
(∞)0
0. . .
. . .
GG ∗
G ∗
...
=
A−1
00...
where G ∗ = limn Gn.Therefore G = (I − A
(∞)0 )−1A−1
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Quasi-Birth-Death processes“Non-Markovian” matrix equations
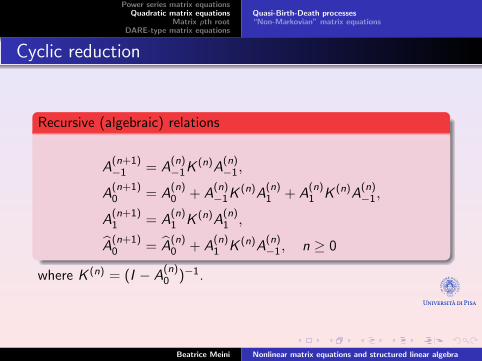
Cyclic reduction
Recursive (algebraic) relations
A(n+1)−1 = A
(n)−1K
(n)A(n)−1,
A(n+1)0 = A
(n)0 + A
(n)−1K
(n)A(n)1 + A
(n)1 K (n)A
(n)−1,
A(n+1)1 = A
(n)1 K (n)A
(n)1 ,
A(n+1)0 = A
(n)0 + A
(n)1 K (n)A
(n)−1, n ≥ 0
where K (n) = (I − A(n)0 )−1.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Quasi-Birth-Death processes“Non-Markovian” matrix equations
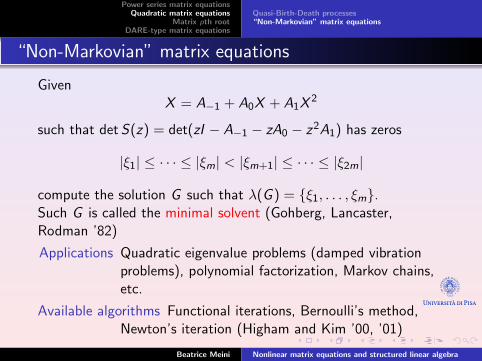
“Non-Markovian” matrix equations
GivenX = A−1 + A0X + A1X
2
such that det S(z) = det(zI − A−1 − zA0 − z2A1) has zeros
|ξ1| ≤ · · · ≤ |ξm| < |ξm+1| ≤ · · · ≤ |ξ2m|
compute the solution G such that λ(G ) = {ξ1, . . . , ξm}.Such G is called the minimal solvent (Gohberg, Lancaster,Rodman ’82)
Applications Quadratic eigenvalue problems (damped vibrationproblems), polynomial factorization, Markov chains,etc.
Available algorithms Functional iterations, Bernoulli’s method,Newton’s iteration (Higham and Kim ’00, ’01)
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Quasi-Birth-Death processes“Non-Markovian” matrix equations
Functional interpretation
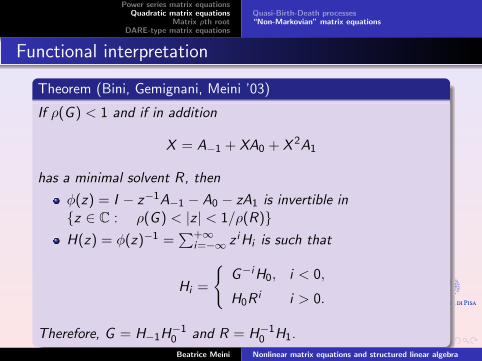
Theorem (Bini, Gemignani, Meini ’03)
If ρ(G ) < 1 and if in addition
X = A−1 + XA0 + X 2A1
has a minimal solvent R, then
φ(z) = I − z−1A−1 − A0 − zA1 is invertible in{z ∈ C : ρ(G ) < |z | < 1/ρ(R)}H(z) = φ(z)−1 =
∑+∞i=−∞ z iHi is such that
Hi =
{G−iH0, i < 0,
H0Ri i > 0.
Therefore, G = H−1H−10 and R = H−1
0 H1.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Quasi-Birth-Death processes“Non-Markovian” matrix equations
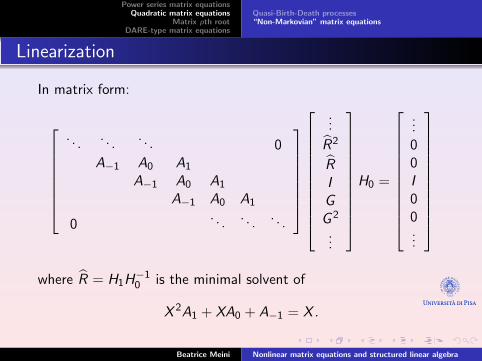
Linearization
In matrix form:
. . .. . .
. . . 0A−1 A0 A1
A−1 A0 A1
A−1 A0 A1
0. . .
. . .. . .
...
R2
RIGG 2
...
H0 =
...00I00...
where R = H1H
−10 is the minimal solvent of
X 2A1 + XA0 + A−1 = X .
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
Some classes of matrix equations
1 Power series matrix equations: X = A−1 + A0X + A1X2 + · · ·
MotivationTheoretical propertiesAlgorithms
2 Quadratic matrix equations: X = A−1 + A0X + A1X2
Quasi-Birth-Death processes“Non-Markovian” matrix equations
3 Matrix pth root: X p = AMatrix sign functionInverse of a matrix Laurent polynomial
4 DARE-type matrix equations: X = C +∑d
i=1 AiX−1Bi
MotivationAlgorithms
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
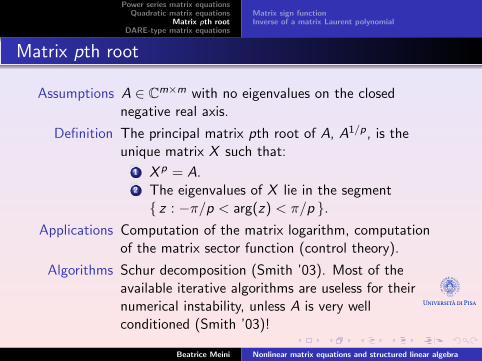
Matrix pth root
Assumptions A ∈ Cm×m with no eigenvalues on the closednegative real axis.
Definition The principal matrix pth root of A, A1/p, is theunique matrix X such that:
1 X p = A.2 The eigenvalues of X lie in the segment{ z : −π/p < arg(z) < π/p }.
Applications Computation of the matrix logarithm, computationof the matrix sector function (control theory).
Algorithms Schur decomposition (Smith ’03). Most of theavailable iterative algorithms are useless for theirnumerical instability, unless A is very wellconditioned (Smith ’03)!
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
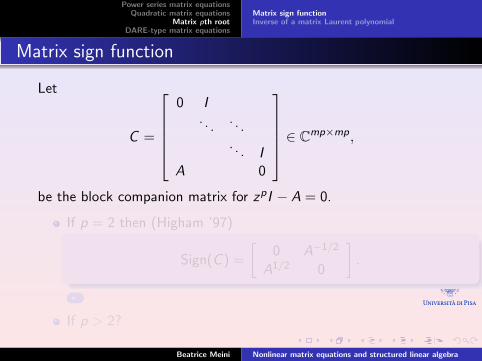
Matrix sign function
Let
C =
0 I
. . .. . .. . . I
A 0
∈ Cmp×mp,
be the block companion matrix for zpI − A = 0.
If p = 2 then (Higham ’97)
Sign(C ) =
[0 A−1/2
A1/2 0
].
If p > 2?
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
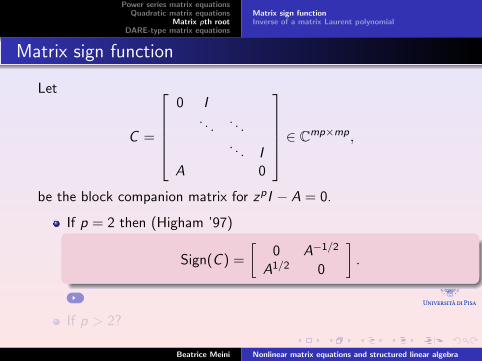
Matrix sign function
Let
C =
0 I
. . .. . .. . . I
A 0
∈ Cmp×mp,
be the block companion matrix for zpI − A = 0.
If p = 2 then (Higham ’97)
Sign(C ) =
[0 A−1/2
A1/2 0
].
If p > 2?
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
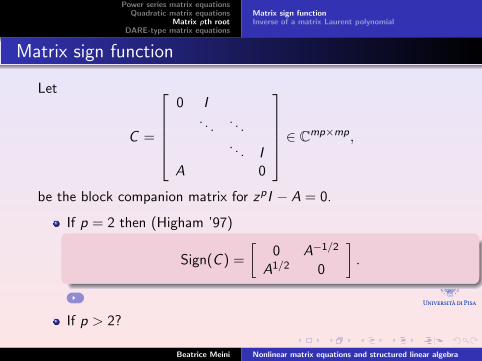
Matrix sign function
Let
C =
0 I
. . .. . .. . . I
A 0
∈ Cmp×mp,
be the block companion matrix for zpI − A = 0.
If p = 2 then (Higham ’97)
Sign(C ) =
[0 A−1/2
A1/2 0
].
If p > 2?
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
Matrix sign function
Benner, Byers, Mehrmann and Xu (’00) prove that ifU ∈ Cmp×m is such that CU = UY for some nonsingularY ∈ Cp×p, and U1 is nonsingular, then X = U2U
−11 is a pth
root of A.
For an appropriate choice of subspace, X is the principal pthroot.
Does the matrix sign of C give the appropriate subspace? YES
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
Matrix sign function
Benner, Byers, Mehrmann and Xu (’00) prove that ifU ∈ Cmp×m is such that CU = UY for some nonsingularY ∈ Cp×p, and U1 is nonsingular, then X = U2U
−11 is a pth
root of A.
For an appropriate choice of subspace, X is the principal pthroot.
Does the matrix sign of C give the appropriate subspace? YES
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
Matrix sign function
Theorem (Bini, Higham, Meini, ’04)
If p = 2q, where q is odd, then the first block column of Sign(C )is given by
1
p
θ0I
θ1A1/p
θ2A2/p
...
θp−1A(p−1)/p
where θi =
∑p−1j=0 ωij
pσj , for i = 0, . . . , p − 1,
ωp = cos(2πp ) + i sin(2π
p ) and σj = −1 forj = bq/2c+ 1, . . . , bq/2c+ q, σj = 1 otherwise.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
Matrix sign function:open issues
Design of a numerically stable algorithm for computing Sign(C ),having a low computational cost: the matrix sign iteration
Cn+1 = (Cn + C−1n )/2, n ≥ 0,
with C0 = C , requires O(m3p3) arithmetic operations at each step!
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
Inverse of a matrix Laurent polynomial: the square root
Theorem (Meini ’04)
The Laurent matrix polynomial
R(z) = z−1(I − A) + 2(I + A) + z(I − A)
is invertible for any z ∈ C such that r < |z | < 1/r where
r = ρ((A1/2 − I )(A1/2 + I )−1
)< 1.
Moreover, H(z) = R(z)−1 = H0 +∑+∞
i=1 (z i + z−i )Hi is such that
A1/2 = 4AH0.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
Inverse of a matrix Laurent polynomial: the square root
Sketch of proof.
Consider the Cayley transform w : C \ {−1} → C,
w(x) = (x − 1)/(x + 1),
which maps the right half plane C+ into the open unit disk.
Observe that
W = w(A1/2) = (A1/2 − I )(A1/2 + I )−1
is the minimal solvent of (I −A)+2(I +A)X +(I −A)X 2 = 0.
Deduce thatR(z) =
(z(A1/2 + I )−(A1/2− I )
)(z−1(A1/2 + I )−(A1/2− I )
)Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
Inverse of a matrix Laurent polynomial: the square root
Sketch of proof.
Consider the Cayley transform w : C \ {−1} → C,
w(x) = (x − 1)/(x + 1),
which maps the right half plane C+ into the open unit disk.
Observe that
W = w(A1/2) = (A1/2 − I )(A1/2 + I )−1
is the minimal solvent of (I −A)+2(I +A)X +(I −A)X 2 = 0.
Deduce thatR(z) =
(z(A1/2 + I )−(A1/2− I )
)(z−1(A1/2 + I )−(A1/2− I )
)Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
Inverse of a matrix Laurent polynomial: the square root
Sketch of proof.
Consider the Cayley transform w : C \ {−1} → C,
w(x) = (x − 1)/(x + 1),
which maps the right half plane C+ into the open unit disk.
Observe that
W = w(A1/2) = (A1/2 − I )(A1/2 + I )−1
is the minimal solvent of (I −A)+2(I +A)X +(I −A)X 2 = 0.
Deduce thatR(z) =
(z(A1/2 + I )−(A1/2− I )
)(z−1(A1/2 + I )−(A1/2− I )
)Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
Inverse of a matrix Laurent polynomial: the square root
Sketch of proof.
Consider the Cayley transform w : C \ {−1} → C,
w(x) = (x − 1)/(x + 1),
which maps the right half plane C+ into the open unit disk.
Observe that
W = w(A1/2) = (A1/2 − I )(A1/2 + I )−1
is the minimal solvent of (I −A)+2(I +A)X +(I −A)X 2 = 0.
Deduce thatR(z) =
(z(A1/2 + I )−(A1/2− I )
)(z−1(A1/2 + I )−(A1/2− I )
)Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
Inverse of a matrix Laurent polynomial: the square root
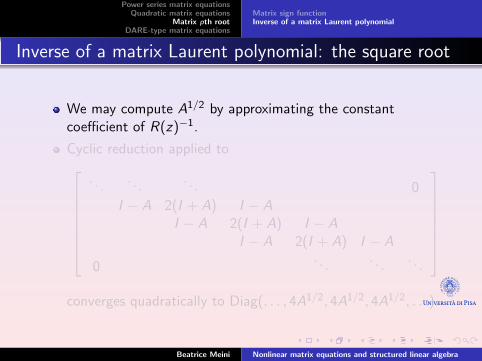
We may compute A1/2 by approximating the constantcoefficient of R(z)−1.
Cyclic reduction applied to
. . .. . .
. . . 0I − A 2(I + A) I − A
I − A 2(I + A) I − AI − A 2(I + A) I − A
0. . .
. . .. . .
converges quadratically to Diag(. . . , 4A1/2, 4A1/2, 4A1/2, . . .).
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
Inverse of a matrix Laurent polynomial: the square root
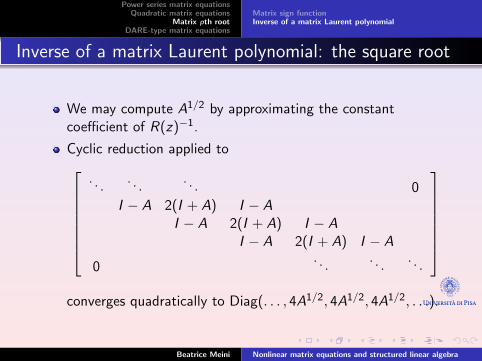
We may compute A1/2 by approximating the constantcoefficient of R(z)−1.
Cyclic reduction applied to
. . .. . .
. . . 0I − A 2(I + A) I − A
I − A 2(I + A) I − AI − A 2(I + A) I − A
0. . .
. . .. . .
converges quadratically to Diag(. . . , 4A1/2, 4A1/2, 4A1/2, . . .).
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
Inverse of a matrix Laurent polynomial: the pth root
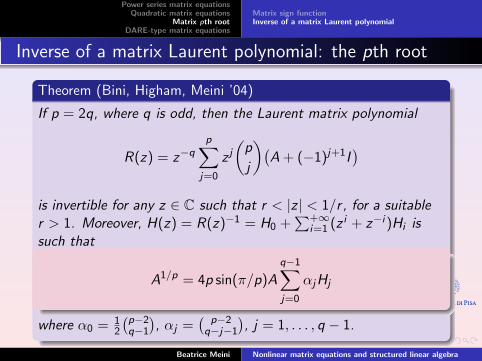
Theorem (Bini, Higham, Meini ’04)
If p = 2q, where q is odd, then the Laurent matrix polynomial
R(z) = z−qp∑
j=0
z j
(p
j
)(A + (−1)j+1I
)is invertible for any z ∈ C such that r < |z | < 1/r , for a suitabler > 1. Moreover, H(z) = R(z)−1 = H0 +
∑+∞i=1 (z i + z−i )Hi is
such that
A1/p = 4p sin(π/p)A
q−1∑j=0
αjHj
where α0 = 12
(p−2q−1
), αj =
( p−2q−j−1
), j = 1, . . . , q − 1.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
Matrix sign functionInverse of a matrix Laurent polynomial
Inverse of a matrix Laurent polynomial: open issues
Design of a numerically stable algorithm for computing the centralp coefficients of H(z).
Some ideas: use of Graeffe iteration, evaluation/interpolationtechniques
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
Some classes of matrix equations
1 Power series matrix equations: X = A−1 + A0X + A1X2 + · · ·
MotivationTheoretical propertiesAlgorithms
2 Quadratic matrix equations: X = A−1 + A0X + A1X2
Quasi-Birth-Death processes“Non-Markovian” matrix equations
3 Matrix pth root: X p = AMatrix sign functionInverse of a matrix Laurent polynomial
4 DARE-type matrix equations: X = C +∑d
i=1 AiX−1Bi
MotivationAlgorithms
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
DARE-type matrix equations
Assumptions B, Ai and Di , i = 1, . . . , d , nonnegative m ×mmatrices, such that B is sub-stochastic andB + Di + A1 + · · ·+ Ad , i = 1, . . . , d , are stochastic.
Problem Computation of the minimal component-wisesolution of the matrix equation
X +d∑
i=1
AiX−1Di = C ,
where C = I − B.Motivation Analysis of certain Markov processes called Tree-Like
processes: single server queues with LIFO servicediscipline, medium access control protocol with anunderlying stack structure, etc. (Latouche,Ramaswami ’99)
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
Tree-like processes
The generator matrix of a Tree-Like process has the form
Q =
C0 Λ1 Λ2 . . . Λd
V1 W 0 . . . 0
V2 0 W. . .
......
.... . .
. . . 0Vd 0 . . . 0 W
,
where C0 is an m ×m matrix,
Λi =[
Ai 0 0 . . .], Vi =
Di
00...
, for 1 ≤ i ≤ d
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
Tree-like processes
The infinite matrix W is recursively defined by
W =
C Λ1 Λ2 . . . Λd
V1 W 0 . . . 0
V2 0 W. . .
......
.... . .
. . . 0Vd 0 . . . 0 W
.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
Tree-like processes
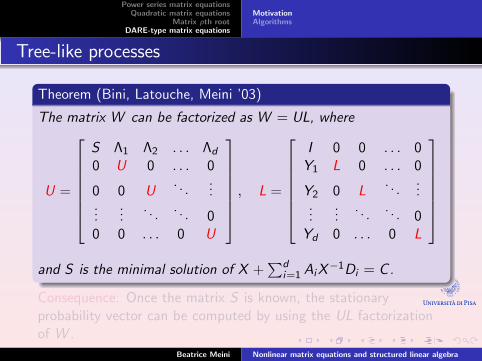
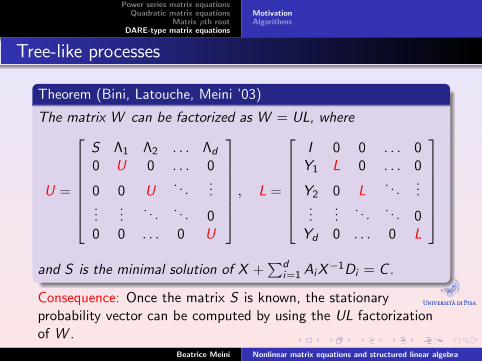
Theorem (Bini, Latouche, Meini ’03)
The matrix W can be factorized as W = UL, where
U =
S Λ1 Λ2 . . . Λd
0 U 0 . . . 0
0 0 U.. .
......
.... . .
. . . 00 0 . . . 0 U
, L =
I 0 0 . . . 0
Y1 L 0 . . . 0
Y2 0 L. . .
......
.... . .
. . . 0Yd 0 . . . 0 L
and S is the minimal solution of X +
∑di=1 AiX
−1Di = C.
Consequence: Once the matrix S is known, the stationaryprobability vector can be computed by using the UL factorizationof W .
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
Tree-like processes
Theorem (Bini, Latouche, Meini ’03)
The matrix W can be factorized as W = UL, where
U =
S Λ1 Λ2 . . . Λd
0 U 0 . . . 0
0 0 U.. .
......
.... . .
. . . 00 0 . . . 0 U
, L =
I 0 0 . . . 0
Y1 L 0 . . . 0
Y2 0 L. . .
......
.... . .
. . . 0Yd 0 . . . 0 L
and S is the minimal solution of X +
∑di=1 AiX
−1Di = C.
Consequence: Once the matrix S is known, the stationaryprobability vector can be computed by using the UL factorizationof W .
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
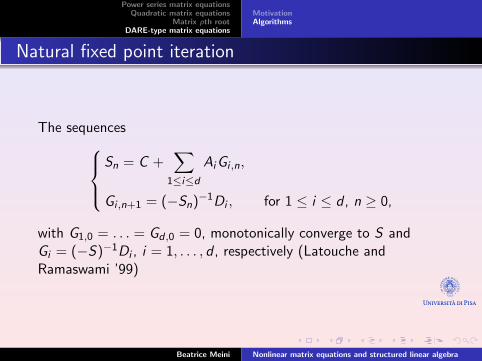
Natural fixed point iteration
The sequencesSn = C +
∑1≤i≤d
AiGi ,n,
Gi ,n+1 = (−Sn)−1Di , for 1 ≤ i ≤ d , n ≥ 0,
with G1,0 = . . . = Gd ,0 = 0, monotonically converge to S andGi = (−S)−1Di , i = 1, . . . , d , respectively (Latouche andRamaswami ’99)
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
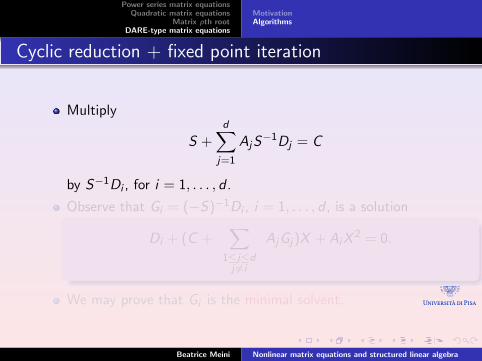
Cyclic reduction + fixed point iteration
Multiply
S +d∑
j=1
AjS−1Dj = C
by S−1Di , for i = 1, . . . , d .
Observe that Gi = (−S)−1Di , i = 1, . . . , d , is a solution
Di + (C +∑
1≤j≤dj 6=i
AjGj)X + AiX2 = 0.
We may prove that Gi is the minimal solvent.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
Cyclic reduction + fixed point iteration
Multiply
S +d∑
j=1
AjS−1Dj = C
by S−1Di , for i = 1, . . . , d .
Observe that Gi = (−S)−1Di , i = 1, . . . , d , is a solution
Di + (C +∑
1≤j≤dj 6=i
AjGj)X + AiX2 = 0.
We may prove that Gi is the minimal solvent.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
Cyclic reduction + fixed point iteration
Multiply
S +d∑
j=1
AjS−1Dj = C
by S−1Di , for i = 1, . . . , d .
Observe that Gi = (−S)−1Di , i = 1, . . . , d , is a solution
Di + (C +∑
1≤j≤dj 6=i
AjGj)X + AiX2 = 0.
We may prove that Gi is the minimal solvent.
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
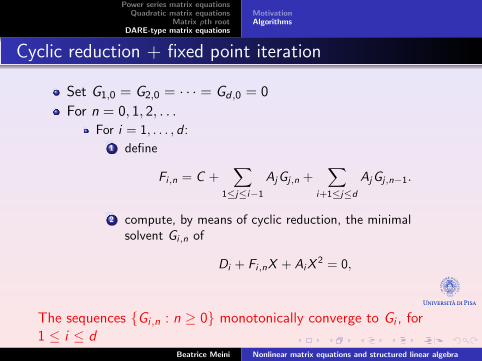
Cyclic reduction + fixed point iteration
Set G1,0 = G2,0 = · · · = Gd ,0 = 0
For n = 0, 1, 2, . . .
For i = 1, . . . , d :1 define
Fi,n = C +∑
1≤j≤i−1
AjGj,n +∑
i+1≤j≤d
AjGj,n−1.
2 compute, by means of cyclic reduction, the minimalsolvent Gi,n of
Di + Fi,nX + AiX2 = 0,
The sequences {Gi ,n : n ≥ 0} monotonically converge to Gi , for1 ≤ i ≤ d
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
Cyclic reduction + fixed point iteration
Set G1,0 = G2,0 = · · · = Gd ,0 = 0
For n = 0, 1, 2, . . .
For i = 1, . . . , d :1 define
Fi,n = C +∑
1≤j≤i−1
AjGj,n +∑
i+1≤j≤d
AjGj,n−1.
2 compute, by means of cyclic reduction, the minimalsolvent Gi,n of
Di + Fi,nX + AiX2 = 0,
The sequences {Gi ,n : n ≥ 0} monotonically converge to Gi , for1 ≤ i ≤ d
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
Cyclic reduction + fixed point iteration
Set G1,0 = G2,0 = · · · = Gd ,0 = 0
For n = 0, 1, 2, . . .
For i = 1, . . . , d :1 define
Fi,n = C +∑
1≤j≤i−1
AjGj,n +∑
i+1≤j≤d
AjGj,n−1.
2 compute, by means of cyclic reduction, the minimalsolvent Gi,n of
Di + Fi,nX + AiX2 = 0,
The sequences {Gi ,n : n ≥ 0} monotonically converge to Gi , for1 ≤ i ≤ d
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
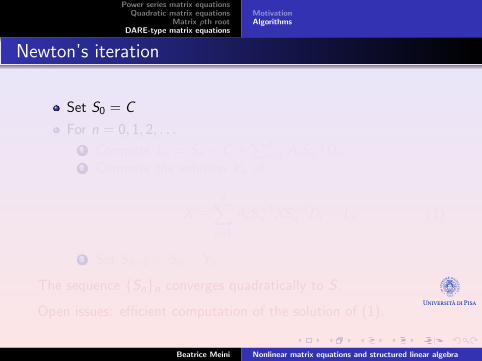
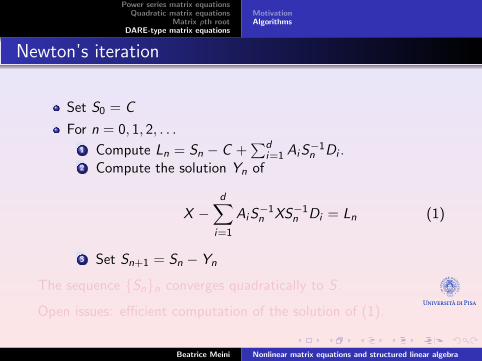
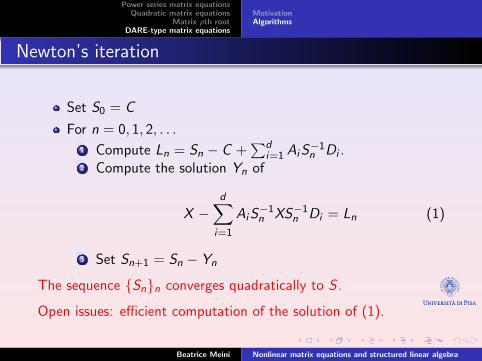
Newton’s iteration
Set S0 = C
For n = 0, 1, 2, . . .
1 Compute Ln = Sn − C +∑d
i=1 AiS−1n Di .
2 Compute the solution Yn of
X −d∑
i=1
AiS−1n XS−1
n Di = Ln (1)
3 Set Sn+1 = Sn − Yn
The sequence {Sn}n converges quadratically to S .
Open issues: efficient computation of the solution of (1).
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
Newton’s iteration
Set S0 = C
For n = 0, 1, 2, . . .
1 Compute Ln = Sn − C +∑d
i=1 AiS−1n Di .
2 Compute the solution Yn of
X −d∑
i=1
AiS−1n XS−1
n Di = Ln (1)
3 Set Sn+1 = Sn − Yn
The sequence {Sn}n converges quadratically to S .
Open issues: efficient computation of the solution of (1).
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Power series matrix equationsQuadratic matrix equations
Matrix pth rootDARE-type matrix equations
MotivationAlgorithms
Newton’s iteration
Set S0 = C
For n = 0, 1, 2, . . .
1 Compute Ln = Sn − C +∑d
i=1 AiS−1n Di .
2 Compute the solution Yn of
X −d∑
i=1
AiS−1n XS−1
n Di = Ln (1)
3 Set Sn+1 = Sn − Yn
The sequence {Sn}n converges quadratically to S .
Open issues: efficient computation of the solution of (1).
Beatrice Meini Nonlinear matrix equations and structured linear algebra
New book
Numerical Methods for Structured Markov Chains
D.A. Bini (University of Pisa)G. Latouche (Universite Libre de Bruxelles)B. Meini (University of Pisa)
Oxford University Press, 2005
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Wiener algebra
Definition
The Wiener algebra W is the set of complex m ×m matrix valuedfunctions A(z) =
∑+∞i=−∞ z iAi such that
∑+∞i=−∞ |Ai | is finite.
Definition
The set W+ is the subalgebra of W made up by power series ofthe kind
∑+∞i=0 z iAi .
Beatrice Meini Nonlinear matrix equations and structured linear algebra
Matrix sign function
Definition
Let M be an m ×m matrix, with no pure imaginary eigenvalues.Let M = S(D + N)S−1 be the Jordan decomposition of M, whereD = Diag(λ1, λ2, . . . , λm) and N is nilpotent and commutes withD. Then the matrix sign of M is the matrix
Sign(M) = S Diag(Sign(λ1),Sign(λ2), . . . ,Sign(λm))S−1,
Beatrice Meini Nonlinear matrix equations and structured linear algebra