novel avionics and air traffic management systems for...
TRANSCRIPT

Tenth USA/Europe Air Traffic Management Research and Development Seminar (ATM2013)
Novel Avionics and Air Traffic Management Systems
for Intent Based OperationsRoberto Sabatini, Alessandro Gardi, Subramanian Ramasamy, Yifang Liu,
David Zammit-Mangion and Daniele Quaglia
Department of Aerospace Engineering, Cranfield University
Cranfield, Bedfordshire, MK43 0AL, United Kingdom
Leopoldo Rodriguez Salazar
AEROTECH Systems Ltd
Milton Keynes, Buckinghamshire, MK11 1BY, United Kingdom
Abstract—The innovative architectures and the trajectory
computation algorithms adopted by a Next Generation Flight
Management System (NG-FMS) and by a ground based 4-
Dimensional Trajectory Planning, Negotiation and Validation (4-
PNV) system are presented. As part of the Avionics and
Communication, Navigation, Surveillance/Air Traffic
Management (CNS/ATM) research efforts in Cranfield
University, project ENDEAVOUR (Evolutionary Network-
Centric Technologies for 4-Dimensional Trajectory Based
Operations in Europe: ATM and Avionic Systems for Intent
Validation, Real-Time Optimisation and Uncertainty-Resilient
Operations) addresses the development of NG-FMS and 4-PNV
systems to meet the next generation airspace requirements. In
particular, within the scope of ENDEAVOUR, Next Generation
Flight, Mission and Air Traffic Management Systems are being
developed and tested. At present, NG-FMS for both manned
aircraft and Unmanned Aerial Vehicles (UAVs) have been
designed. The NG-FMS is fully interoperable with the 4-PNV
system, enabling automated Intent Based Operations (IBO) in the
future ATM context. The uncertainties affecting the nominal
trajectories are investigated to estimate the NG-FMS and 4-PNV
system error budgets. These budgets are compared with the
Required Navigation Performance (RNP) values set by
International Civil Aviation Organization (ICAO) for the various
operational flight tasks considered. Simulation case studies of the
trajectory optimisation, negotiation and validation processes are
performed in realistic operational scenarios. The proposed and
validated negotiation loops are well within the 5 minutes
timeframe of typical online tactical routing/rerouting tasks.
Keywords-Flight Management System; Four Dimensional
Trajectory Optimisation; Intent Based Operation; Stochastic
Trajectory; Intent Validation
I. INTRODUCTION
The rapid expansion of global air transport and the growing demand for environmentally sustainable aviation solutions pose new challenges to Avionics and Air Traffic Management (ATM) system developers. Current research is striving to achieve improved safety, increased capacity, greater efficiency and minimised environmental impacts. The Advisory Council for Aviation Research and Innovation in
Europe (ACARE) has set definite targets for the environmental sustainability of aviation [1, 2]. As indicated in the Strategic Research & Innovation Agenda (SRIA) published by ACARE, the environmental targets to be achieved by 2050 include [2]:
Reducing CO2 emissions by 75%.
Reducing perceived external noise by 65%.
Reducing NOx emissions by 90%.
The Single European Sky Air Traffic Management Research (SESAR) and the Clean Sky Joint Technological Initiative (JTI) for Aeronautics and Air Transport are the prominent programmes developing and implementing innovative concepts for the future air transportation in Europe. In parallel with the air transport modernisation efforts in Europe driven by SESAR/Clean Sky, the Next Generation Air Transportation System (NextGen) programme drives the transformation process in the United States.
As part of the Clean Sky Systems for Green Operations (SGO) Integrated Technology Demonstrators (ITD), Cranfield University is developing the Greener Aircraft Trajectories under ATM Constraints (GATAC) optimization tool [3, 4]. GATAC research activities have generated significant spinoffs, allowing the development of innovative Avionics and ATM systems that meet the combined requirements of SESAR and Clean Sky. The optimisation of aircraft trajectories is a prominent strategy for minimising fuel consumption, noise and gaseous emissions.
II. THE ENDEAVOUR CONCEPT
A. Overview
Project ENDEAVOUR (Evolutionary Network-Centric Technologies for 4-Dimensional Trajectory Based Operations in Europe: ATM and Avionic Systems for Intent Validation, Real-Time Optimisation and Uncertainty-Resilient Operations) aims at developing systems with Four Dimensional Trajectory (4DT) planning, negotiation and validation operational capabilities to be integrated into the Next Generation Air Traffic Management (NG-ATM) environment for Trajectory /
This research was partially funded by the European Union’s Seventh Framework Programme (FP7/2007-2013) through the Clean Sky Joint Technology Initiative (JTI) for Aeronautics and Air Transport under Grant Agreement n° CSJU-GAM-SGO-2008-001.
Intent Based Operations (TBO/IBO). In particular, a Next Generation Flight Management System (NG-FMS) and a ground-based 4DT Planning, Negotiation and Validation (4-PNV) system have been developed. Recent research is also addressing a variant of the NG-FMS suitable for Unmanned Aerial Vehicle (UAV) applications.
B. The CNS/ATM Systems for TBO/IBO : The 4-PNV Concept
The dynamic nature of the various models that support ATM operations is still not taken into account in many existing systems. Information is generally still treated in a static and deterministic manner for given periods of time until the next update is provided [5]. The inability to handle traffic uncertainties in a predictive real-time manner results in overall system inefficiencies. Hence, it is of paramount importance to implement 4DT concepts through the design and development of avionic and ground-based systems providing:
Continuous synchronisation of trajectories and states, so that time becomes a dynamically managed resource.
Enhancing the transition from voice communication to data-driven operations.
Native endorsement of environment-related objectives in the automated systems, in order to reduce environmental impact whilst minimising the total cost of a flight.
Enhanced capability to exploit the Collaborative Decision Making (CDM) concept among all stakeholders utilising accurate information acquired from the airborne systems.
Role shifting of the ground ATM from command and control oriented units to a highly automated decision-maker in an interoperable environment, based on the user-preferred trajectories.
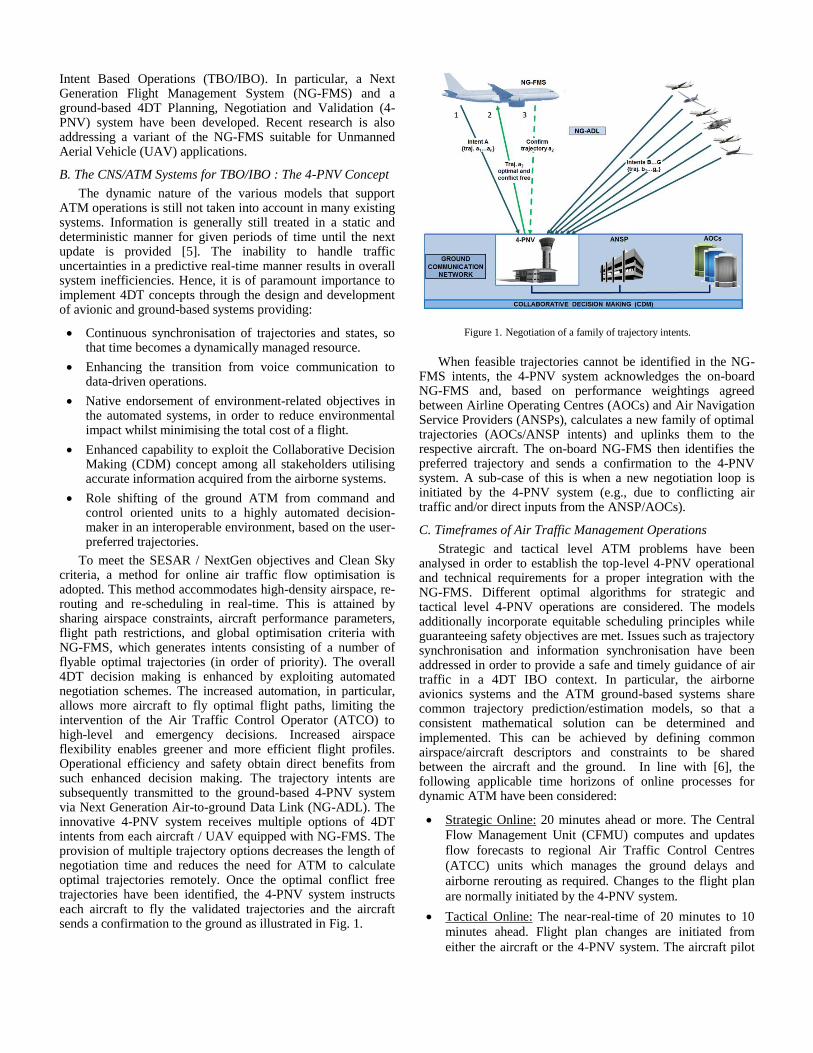
To meet the SESAR / NextGen objectives and Clean Sky criteria, a method for online air traffic flow optimisation is adopted. This method accommodates high-density airspace, re-routing and re-scheduling in real-time. This is attained by sharing airspace constraints, aircraft performance parameters, flight path restrictions, and global optimisation criteria with NG-FMS, which generates intents consisting of a number of flyable optimal trajectories (in order of priority). The overall 4DT decision making is enhanced by exploiting automated negotiation schemes. The increased automation, in particular, allows more aircraft to fly optimal flight paths, limiting the intervention of the Air Traffic Control Operator (ATCO) to high-level and emergency decisions. Increased airspace flexibility enables greener and more efficient flight profiles. Operational efficiency and safety obtain direct benefits from such enhanced decision making. The trajectory intents are subsequently transmitted to the ground-based 4-PNV system via Next Generation Air-to-ground Data Link (NG-ADL). The innovative 4-PNV system receives multiple options of 4DT intents from each aircraft / UAV equipped with NG-FMS. The provision of multiple trajectory options decreases the length of negotiation time and reduces the need for ATM to calculate optimal trajectories remotely. Once the optimal conflict free trajectories have been identified, the 4-PNV system instructs each aircraft to fly the validated trajectories and the aircraft sends a confirmation to the ground as illustrated in Fig. 1.
Figure 1. Negotiation of a family of trajectory intents.
When feasible trajectories cannot be identified in the NG-FMS intents, the 4-PNV system acknowledges the on-board NG-FMS and, based on performance weightings agreed between Airline Operating Centres (AOCs) and Air Navigation Service Providers (ANSPs), calculates a new family of optimal trajectories (AOCs/ANSP intents) and uplinks them to the respective aircraft. The on-board NG-FMS then identifies the preferred trajectory and sends a confirmation to the 4-PNV system. A sub-case of this is when a new negotiation loop is initiated by the 4-PNV system (e.g., due to conflicting air traffic and/or direct inputs from the ANSP/AOCs).
C. Timeframes of Air Traffic Management Operations
Strategic and tactical level ATM problems have been analysed in order to establish the top-level 4-PNV operational and technical requirements for a proper integration with the NG-FMS. Different optimal algorithms for strategic and tactical level 4-PNV operations are considered. The models additionally incorporate equitable scheduling principles while guaranteeing safety objectives are met. Issues such as trajectory synchronisation and information synchronisation have been addressed in order to provide a safe and timely guidance of air traffic in a 4DT IBO context. In particular, the airborne avionics systems and the ATM ground-based systems share common trajectory prediction/estimation models, so that a consistent mathematical solution can be determined and implemented. This can be achieved by defining common airspace/aircraft descriptors and constraints to be shared between the aircraft and the ground. In line with [6], the following applicable time horizons of online processes for dynamic ATM have been considered:
Strategic Online: 20 minutes ahead or more. The Central
Flow Management Unit (CFMU) computes and updates
flow forecasts to regional Air Traffic Control Centres
(ATCC) units which manages the ground delays and
airborne rerouting as required. Changes to the flight plan
are normally initiated by the 4-PNV system.
Tactical Online: The near-real-time of 20 minutes to 10
minutes ahead. Flight plan changes are initiated from
either the aircraft or the 4-PNV system. The aircraft pilot

has access to the near-term airspace conditions from
aircraft sensor system and therefore is best placed to plan
the re-route.
Emergency: Less than 10 minutes ahead. Air Traffic
Control (ATC) issues instructions manually for safe
passage. Safety nets are also present to guide the aircraft
to safety. In an emergency, the pilot can pre-empt
clearances and, in line with the current practice, can reject
instructions if they jeopardise the continued safety of
flight.
The conceived 4-PNV system negotiation and validation capabilities are tailored, in particular, for the strategic online (20 minutes-hours ahead) and tactical online (20 to 10 minutes ahead) operations. In emergency situations (up to 10 minutes ahead), standard procedures are applied under pilot’s and/or ATCo’s direct intervention.
D. Intent Negotiaition Loops
A robust negotiation and validation protocol is essential for the 4-PNV system implementation. Negotiation loops are possible when there is enough time and adequate airspace flexibility to complete the process, and no safety concerns. To meet these requirements, an adequately fast process for finding conflict free and feasible Four-Dimensional (4D) trajectories must be adopted. A standard negotiation protocol is defined in EUROCONTROL’s DOC 97-70-14 [7]. Depending on the time available, various protocols can be used to iteratively generate an optimal flight plan change, taking all constraints into consideration. In all cases, the “single-attempt” negotiation is primarily considered.
Figure 2. 4-PNV system initiated negotiation/validation loop.
The online processes are distributed across airborne NG-FMS, AOC, System Wide Information Management (SWIM), Air Traffic Flow Management (ATFM) and ATCC. Aspects such as communication via a reliable and high capacity data link, surveillance and monitoring are always part of this
integrated architecture. The NG-FMS verifies if the Controlled Time of Arrival (CTA) and the tolerances can be achieved based on the known aircraft operational envelope. The ground-based 4-PNV system analyses and selects the best combination of intended intents among all aircraft to best achieve global objectives, while ensuring conflict free routes. The shared trajectory intents include the aircraft’s unique identification, the aircraft category and aircraft’s timing parameters. The intents are processed in terms of Three-Dimensional (3D) position, velocity and time. The 4-PNV algorithm is ensured to be very fast and robust to allow real time scheduling. The designed negotiation loops are depicted in Fig. 2 and Fig. 3, which respectively represent 4-PNV initiated and NG-FMS initiated loops.
Figure 3. NG-FMS initiated negotiation/validation loop.
E. Intent Validation
In terms of computational complexity, finding the optimal combination of aircraft trajectories is believed to be NP-hard [8, 9], meaning it could not be solved in polynomial time [10]. An algorithm is only considered ‘efficient’ if it can be solved in polynomial time or better. This means that approximate optimisation solutions are required [8]. Moreover, a few computationally efficient algorithms are suitable to model the predictive capabilities of a controller. A solution which best meets both the SESAR and Clean Sky objectives would determine the combination of conflict-free trajectory intents that would reduce overall pollution, overall costs and overall delays. A solution to this combinational optimisation problem can be found using either an exact or heuristic algorithm. Exact algorithms find the solution with brute force, trying all possible combinations and therefore the computation time is usually prohibitive for this purpose. Heuristics will find a solution in a much faster timeframe but the solution is not guaranteed to be the most optimal. Trajectory intents are processed by following a pairwise comparison scheme.
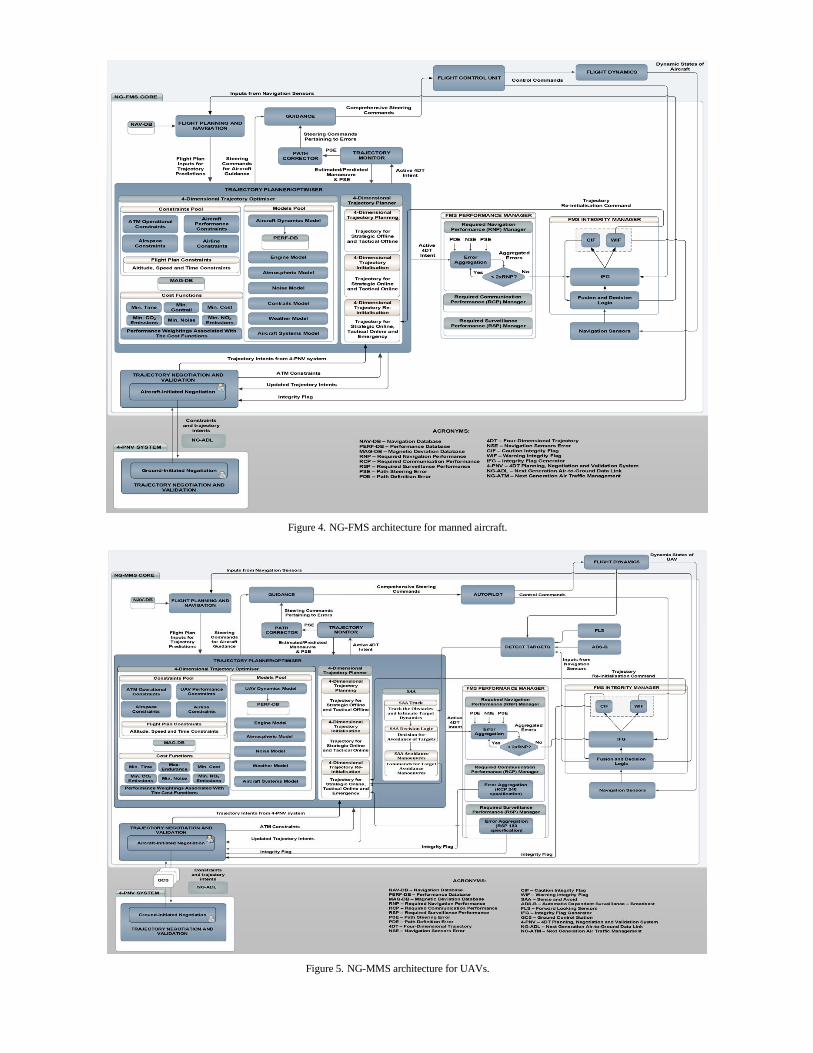
Figure 4. NG-FMS architecture for manned aircraft.
Figure 5. NG-MMS architecture for UAVs.

III. NG-FMS ARCHITECTURE
The NG-FMS, as the heart of the aircraft avionics systems and especially responsible for automated guidance services, is developed considering future environmentally sustainable 4D IBO and pursuant to PBN standards. The NG-FMS architecture is shown in Fig. 4. The key NG-FMS functionalities are: trajectory planning/optimisation, trajectory monitoring, path correction/guidance correction, and air-to-ground trajectory negotiation and validation with the 4-PNV system.
To accomplish these tasks, the key NG-FMS modules are:
Trajectory Planning/ Optimisation – It addresses various business and environmental criteria, and provides optimal trajectory solutions based on performance weightings. The 4DT planning and optimisation tasks are performed by this module for strategic, tactical and emergency situations. The 4DT optimiser includes the models pool and constraints pool and involves a number of cost functions.
Trajectory Monitoring – It performs state estimation, calculating the deviations between the active 4DT intents and the estimated/predicted aircraft states.
Path Correction – It corrects the path deviation in terms of lateral, vertical and time profiles when the Path Steering Error (PSE) exceeds the maximum tolerance associated with the RNP requirements. The generated steering commands are provided to the guidance module of the NG-FMS.
Trajectory Negotiation and Validation – It carries out the process of negotiation, which can be initiated by the pilot via the NG-FMS, making use of the information available on board, or by the 4-PNV system, supervised by the Air Traffic Control Operator (ATCO), requiring validation checks to ensure they are feasible for the aircraft.
Integrity Analysis – It monitors the active 4DT intents for errors to address integrity requirements. The integrity analysis module is based on RNP manager which accounts for the total navigation system error, Required Communication Performance (RCP) manager and Required Surveillance Performance (RSP) manager. For instance, if the aggregated errors exceed the alarm limit with respect to RNP thresholds, inputs are provided to the Integrity Manager module to ensure integrity.
Integrity Management – It manages the integrity requirements in the NG-FMS. This module is based on the Avionics-Based Integrity Augmentation (ABIA) concept [11, 12]. The sensor systems involved are Global Navigation Satellite System (GNSS), Inertial Navigation System (INS) and Aircraft Dynamics Model (ADM) as a virtual sensor. The inputs from the different sensor candidates are augmented based on predefined decision logics and the outcome is passed as input to an Integrity Flag Generator (IFG). The IFG, based on the decision logic and the dynamic aircraft states, triggers Caution Integrity Flags (CIF) and Warning Integrity Flags (WIF), when the aggregated errors exceed the alert limit. GNSS is envisaged as the primary means of navigation and hence the system generates the predictive CIF flag when a loss of GNSS data is anticipated. This process ensures that integrity is met when there is actual loss of GNSS data by triggering the reactive
WIF flag to re-initialise the trajectory planning and subsequently, the trajectory optimisation process.
The NG-FMS architecture for UAVs (Mission Management System – MMS) is illustrated in Fig. 5. To integrate the UAVs into the airspace, it is essential that UAVs are equipped with improved navigation/guidance and Track, Decide and Avoid (TDA) functionalities with 4DT capability. The main difference between manned aircraft and UAVs in terms of 4D-TBO is that, apart from 4D trajectory planning, NG-FMS for UAVs needs also to interact with the Sense and Avoid (SAA) system. The SAA system is dependent on various Forward Looking Sensors (FLS) and Automatic Dependent Surveillance-Broadcast (ADS-B) for detection of targets [13]. After detection, the targets are tracked and suitable decision logic is employed. Appropriate avoidance commands are generated to avoid the targets. The interaction of information from Next Generation Mission Management System (NG-MMS) with the 4-PNV system might be carried out via Ground Control Stations (GCS).
IV. MATHEMATICAL FORMULATION
A. Aircraft Dynamics Model
A Three-Degree-of-Freedom (3DOF) point mass model with variable mass is used as the Aircraft Dynamics Model (ADM). The 3DOF Equations of Motion (EOM) describing the aircraft states and governing the translational movements along the longitudinal, lateral and vertical axes are:
d
dt cos sin
R h (1)
d
dt cos cos
cos RT h) (2)
dh
dt sin h (3)
d
dt T , ,h) D(L, ,h)
m g sin (4)
( )
(5)
d
dt (
g
n) (
sin
cos ) (6)
dm
dt c( , ,h) T , ,h) (7)
The overall assumptions associated with this ADM are:
The aircraft is a rigid body and the wing bending effect is
not considered.
The aircraft engine is rigidly mounted on the vehicle
body and the thrust axis and aircraft velocity axis are
aligned with no bias. Hence, the thrust angle is equal to
zero.

The aircraft mass is located in the aircraft centre of
gravity and the mass is varying only as a result of fuel
consumption.
Wind effects are considered along the three translational
axes of the 3DOF EOM. The wind vector consists of two
components: the nominal wind and stochastic element.
The stochastic wind is modelled as a random error with
Gaussian distribution [14].
Symmetrical flight conditions are assumed, hence no
sideslip is considered.
The gravity is considered uniform, i.e. it does not change
with altitude variations.
The geodetic coordinate system of reference is WGS-84.
The Differential Algebraic Equations (DAEs) from (1) to (7) incorporate three control variables u ( , n, ) where is the engine power setting, is the load factor and is the bank angle. These form the inputs of the dynamic system. The seven state variables are described as (m, , , h, , , ) the derivatives of which are presented in the EOMs where is the aircraft mass, is the geodetic latitude, is the geodetic longitude, is the altitude, is the true air speed, is the flight path angle and is the heading. In the DAEs, R is the meridional radius of curvature, RT is the transverse radius of curvature, W is the wind velocity and g is the earth gravity.
B. Path Constraints
The NG-FMS considers airline constraints, which are predominately cost related, aircraft performance constraints, airspace constraints and ATM operational constraints obtained from the 4-PNV system. In addition to this, the flight plan constraints can also be included as speed, altitude or time constraints at any waypoint in the optimised trajectory. Path constraints introduced in the 4DT optimiser are functions of either the system state or control variables, which are defined to comply with the operational or safety procedures. The equality ( Cmin Cma ) and inequality ( Cmin Cma ) path constraints are expressed by:
( ) ( ) (8)
A basic application of path constraints is the No-Fly Zones (NFZ). NFZ are airspace regions or volumes, with definite boundaries, within which flying is restricted or completely prohibited. For practical purposes, NFZ can be effectively used to introduce traffic separation aspects, terrain obstacles, weather hazards, as well as a primitive representation of noise-sensitive areas and persistent contrail formation regions, for the Four Dimensional Trajectory Optimisation (4DT-O) process.
C. Deterministic 4DT-O Formulation
The fundamental objective of 4DT-O is to compute an optimal trajectory addressing minimum fuel consumption, flight time, operative cost, pollutant emissions, noise impacts and contrail formation. The 4DT-O also considers path restrictions such as NFZ. The trajectory optimisation task can be treated as an Optimal Control Problem (OCP) as the trajectory states are affected by both static parameters and functions, which are the time-dependent system state and control variables. The goal of the OCP is to find the extremes
of a cost function, either the minima or the maxima, without violating the specified constraints. Furthermore, path restrictions, which may appear as equality or inequality constraints, are introduced via weighting penalties which prevent flying over the restricted regions. Pseudospectral collocation method combined with weighted sum method was adopted to carry out real-time multi-objective deterministic 4DT-O.
The comprehensive cost function is described as in the Bolza form, which is the sum of the integral Lagrange
term ∫ ( ( ) ( ) )
representing the running cost
between the initial time and final time , and the Mayer term ( (t ), t , (tf), tf), which represents the terminal cost. The Mayer term is the sum of costs at discrete times. Hence, the cost is a function of the final system state and/or final time.
i (t ), t , (tf), tf ∫
( ) ( ) (9)
The cost function of the system is subject to dynamic
constraints d
dt, given in the first derivative form by:
( ) ( ) ( ) , t t ,tf (10)
The boundary conditions, describing the initial and final
states, are given by:
min
(t ), (tf), u(t ), u(tf) ma (11)
When multiple performance indices are required to be
optimised, the cost function can be described as the sum of
weighted indices, corresponding to different performance
criterions. The parameter is defined as the gain or the
weighting of a particular performance index.
( ) ∑ m m
m
) (12)
D. Multi-Objective Performance Criteria and Weightings
In addition to the system dynamics and constraints, the 4DT-O is predominantly driven by a set of performance indices, i.e. quality measures of the trajectory, which are described with the help of cost functions. In this paper, the modelling of performance criterions is addressed with respect to time, fuel consumption and emission, Noise-Sensitive Area (NSA) and Persistent Contrail Formations Region (PCFR), to reduce the overall cost of a flight. Since the NSAs and PCFRs are modelled as no-fly zones, only the cost functions for time and fuel consumption are present in the test cases.
E. Stochastic 4DT-O Formulation
In real conditions, aircraft motions are perturbed by a number of uncertainties in stochastic processes, for instance, the navigation/guidance errors, wind and other atmospheric estimation errors, and system modelling errors. These random elements are inherently unpredictable and significantly affect the reliability of the trajectory computation. At its definition phase, it is important to note that the identified problem is not assumed as a conventional path tracking, but a path planning

problem handling dynamic performance monitoring and trajectory optimisation, which is predictive in nature. The input uncertainties transform the deterministic trajectory optimisation case into a stochastic problem consisting of nonlinear dynamic system states and errors, whose differential form is described by:
(t) f (t),u(t),w(t),t , t t ,tf (13)
In this case, and u are the system states and controls described using the ADM. The term w represents the uncertainties which act as additive random inputs characterising the state uncertainties. Alternatively, the true system state can be interpreted as a contribution of a deterministic nominal state and a stochastic state as a result of uncertainty disturbance, which is given by:
t) nominal t) w t) (14)
where w t) is the stochastic term and depends on the noise
affecting ( ) measurement. It can be modelled as a
random error with Gaussian distribution (normal distribution)
to simplify the problem while avoiding imposing excessive
computation effort.
F. Error Propagation
According to the stochastic problem formulation, the trajectory uncertainties are added to the nominal trajectory states and the error terms are injected prior to execution of trajectory optimization loops. As a result, the propagation of parametric uncertainties is carried out using the ADM [15].
V. RESULTS
Results relative to representative case studies of 4DT intent optimization, negotiation and validation between the NG-FMS and the 4-PNV system are presented. In order to be adopted for both strategic online and tactical online contexts, it is assumed that the total duration of the developed optimisation, negotiation and validation processes must remain under 300 seconds. Two test cases were selected to demonstrate the 4DT intent optimisation capability of the NG-FMS and 4DT intent negotiation and validation processes of the NG-FMS and the 4-PNV system.
A. 4DT Intent Optimisation Test Case
This section summarises the 4DT intent optimisation case study definitions. 4DT intents are generated from the NG-FMS and the optimisation of the generated intents is accomplished with respect to time and fuel costs, whilst taking into account noise-sensitive areas or persistent contrail formation regions. The simulations performed are based on the following assumptions:
A non-rotating spherical earth model is employed
NSAs and PCFRs are represented as circular NFZ
The test mission waypoints data and path restrictions are provided in Table I. A typically loaded Airbus A380 aircraft with maximum take-off weight of 480,000 kg is assumed to be flying the mission. The aircraft parameters and aerodynamic data are extracted from EUROCONTROL Base of Aircraft Data (BADA) [16].
TABLE I. MISSION DESCRIPION
Description Latitude Longitude Radius
Departure (EGLL) N 51o 29’ 8” W 0o 28’ ” -
NFZ 1 N 51o 37’ 58” W 0o 57’ 45” 4.32 NM
NFZ 2 N 51o 45’ 38” W 1o 59’ 58” 5.39 NM
Top of Climb (DOBEM) N 51o 52’ ” W 2o 55’ 45” -
Weather Cell 1 N 36.5o ’ ” W 80o ’ ” 3000 NM
Weather Cell 2 N 49o ’ ” W 20o ’ ” 1480 NM
PCFR N 40o ’ ” W 50o ’ ” 12000 NM
Top of Descent (FLCON) N 34o ’ 58” W 83o 39’ 4” -
Destination (KATL) N 33o 38’ 2” W 84o 25’ 4 ” -
The simulation case studies were performed for the various
flight phases based on the NG-FMS architecture described earlier. The simulations were executed on the Windows 7 Enterprise platform (64-bit OS) supported by the Intel Core i7-3770 CPU with clock speed 3.4 GHz and 16.0 GB RAM.
Pseudospectral method is used for solving the defined 4DT-O problem for each given performance weighting, providing the functional capabilities to compute 4DT intents on-board in quasi real-time. For the mission data considered, during the departure, the aircraft takes off from London Heathrow airport in the United Kingdom (International Civil Aviation Organization - ICAO code: EGLL) and proceeds towards the DOBEM waypoint while climbing up to the planned cruise flight level 340 (34,000 feet). Two NFZ are introduced as path constraints in the climb phase with an operational perspective. In the cruise scenario, the aircraft proceeds from DOBEM waypoint (top of climb) to FLCON waypoint (top of descent) at a constant cruise altitude of FL 340. During the descent phase, the aircraft proceeds from the top of descent waypoint towards Hartsfield Jackson Atlanta International Airport in the United States (ICAO code: KATL).
In the climb phase, a family of trajectories is generated considering a number of cost functions depending on time and fuel optimisation. Fig. 6 is a 3D view of the different trajectories generated. Results indicate that all path constraints are satisfied for each weighting option within the specified iteration limits. The simulation results demonstrate that the approach is particularly powerful when near-term traffic is detected and alternative conflict-avoidance trajectories are required to be proposed to the 4-PNV system.

Figure 6. Climb phase 4DT intents.
To account for environmental sustainability, the numerical data for time, fuel burn and the associated emissions are analysed using interpolation of data specified in the Noise-Power-Distance (NPD) table. The attained values can be used to account for emission-related factors. In this simulation case, the maximum CO2 and NOx reductions are 2203 kg and 11 kg, respectively. The trajectory with minimal fuel burn consumes 704 kg fuel less than that of the trajectory considering minimum time. The optimisation of the reference trajectory took 15 seconds while the NSA avoidance trajectory required an additional 6 seconds for optimisation. The time required for calculating each set of generated 4DT intents is always within 30 seconds time frame. This reflects the quasi real-time optimisation performance requirements of 10 minutes time scale to complete trajectory re-planning, and also provides tolerances to handle an increased number of constraints. Fig. 7 illustrates the Google Earth representation of the family of trajectory intents generated by the NG-FMS.
Figure 7. Climb phase – Google Earth representation.
A family of trajectories is generated in the cruise phase, based on PCFRs and weather cells as path constraints as shown in the Fig. 8. As the altitude is kept constant, the ground speed (and true air speed) drops from 247 m/s (480 kts TAS / Mach 0.8) at DOBEM to 233 m/s (453 kts TAS / Mach 0.78) at FLCON. The results demonstrate that the insertion of flight path constraints directly into the cost function is feasible both numerically and analytically. The trajectory intents optimised with contrails and weather cells as path constraints are generated within 10 seconds, and 72 seconds when wind is added as part of the 4DT-O process.
Figure 8. Cruise phase 4DT intent.
Figure 9. Descent Phase 4DT intents.
The effects of wind on the generated trajectory intents are analysed and suitable integrity measures are adopted in the descent phase. The 3D view of the reference trajectory and the trajectory generated in the presence of stochastic wind (with boundaries 10-21 kts, specifically chosen to trigger alerts) are depicted in Fig. 9. In the figure, also 0.5 RNP lateral boundaries relative to the A380 aircraft reference trajectory are shown. In the absence of suitable FMS-autopilot loops, the trajectory affected by wind would exceed the RNP 0.5 containment boundaries (red trajectory). However, the NG-
-3
-2.5
-2
-1.5
-1
-0.5
0
51.45 51.5 51.55 51.6 51.65 51.7 51.75 51.8 51.85 51.9 51.95
0
2000
4000
6000
8000
10000
12000
Latitude (deg)
CLIMB PHASE : 4DT intents avoiding NSAs
Longitude (deg)
Alt
itu
de (
m)
Top of Climb
NFZ 2
NFZ 1
Departure
-80 -70 -60 -50 -40 -30 -20 -10
10
20
30
40
50
60
70
Longitude (deg)
La
titu
de
(deg
)
CRUISE PHASE : 4D Trajectory Optimised in the presence of Weather Cells and PCFR
PCFR
WEATHER
CELL 2
WEATHER
CELL 1
-84.5 -84.4 -84.3 -84.2 -84.1 -84 -83.9 -83.8 -83.7 -83.633.7
33.8
33.9
34
34.1
2000
4000
6000
8000
10000
12000
Longitude (deg)
Latitude (deg)
Alt
itu
de
(m)
Reference trajectory
RNP 0.5 containment region
Trajectory in the presence
of stochastic wind
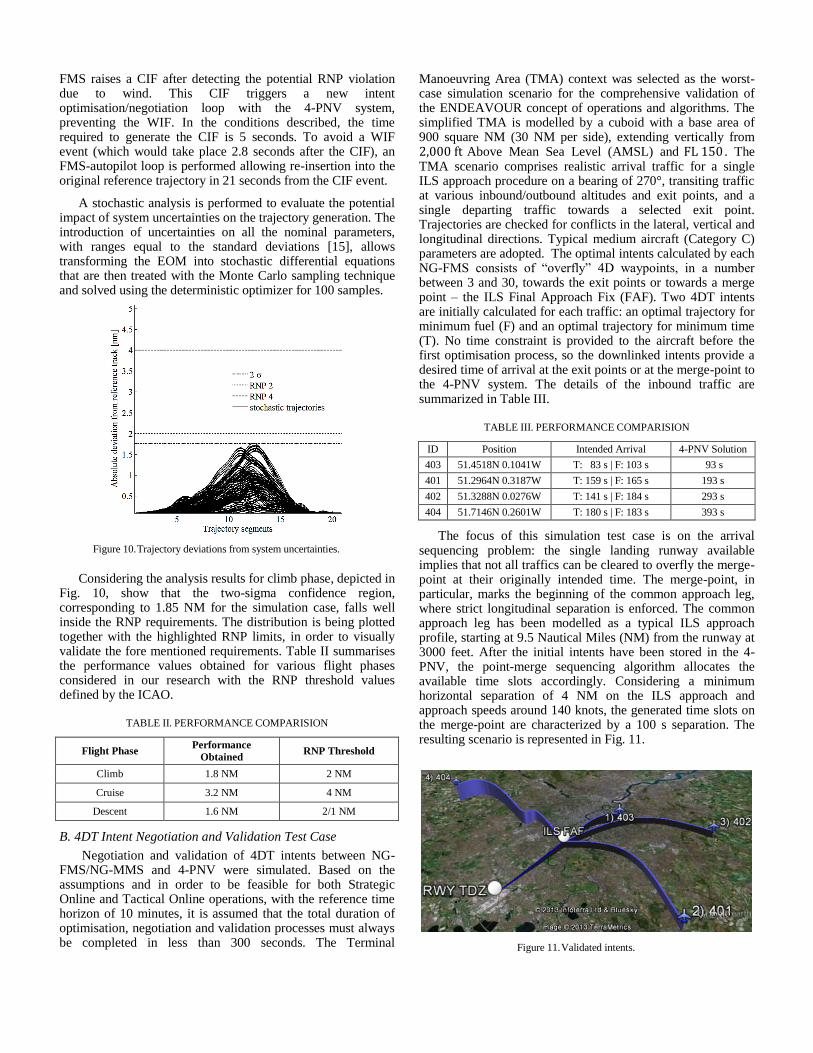
FMS raises a CIF after detecting the potential RNP violation due to wind. This CIF triggers a new intent optimisation/negotiation loop with the 4-PNV system, preventing the WIF. In the conditions described, the time required to generate the CIF is 5 seconds. To avoid a WIF event (which would take place 2.8 seconds after the CIF), an FMS-autopilot loop is performed allowing re-insertion into the original reference trajectory in 21 seconds from the CIF event.
A stochastic analysis is performed to evaluate the potential impact of system uncertainties on the trajectory generation. The introduction of uncertainties on all the nominal parameters, with ranges equal to the standard deviations [15], allows transforming the EOM into stochastic differential equations that are then treated with the Monte Carlo sampling technique and solved using the deterministic optimizer for 100 samples.
Figure 10. Trajectory deviations from system uncertainties.
Considering the analysis results for climb phase, depicted in Fig. 10, show that the two-sigma confidence region, corresponding to 1.85 NM for the simulation case, falls well inside the RNP requirements. The distribution is being plotted together with the highlighted RNP limits, in order to visually validate the fore mentioned requirements. Table II summarises the performance values obtained for various flight phases considered in our research with the RNP threshold values defined by the ICAO.
TABLE II. PERFORMANCE COMPARISION
Flight Phase Performance
Obtained RNP Threshold
Climb 1.8 NM 2 NM
Cruise 3.2 NM 4 NM
Descent 1.6 NM 2/1 NM
B. 4DT Intent Negotiation and Validation Test Case
Negotiation and validation of 4DT intents between NG-FMS/NG-MMS and 4-PNV were simulated. Based on the assumptions and in order to be feasible for both Strategic Online and Tactical Online operations, with the reference time horizon of 10 minutes, it is assumed that the total duration of optimisation, negotiation and validation processes must always be completed in less than 300 seconds. The Terminal
Manoeuvring Area (TMA) context was selected as the worst-case simulation scenario for the comprehensive validation of the ENDEAVOUR concept of operations and algorithms. The simplified TMA is modelled by a cuboid with a base area of 900 square NM (30 NM per side), extending vertically from Above Mean Sea Level (AMSL) and . The TMA scenario comprises realistic arrival traffic for a single ILS approach procedure on a bearing of 270°, transiting traffic at various inbound/outbound altitudes and exit points, and a single departing traffic towards a selected exit point. Trajectories are checked for conflicts in the lateral, vertical and longitudinal directions. Typical medium aircraft (Category C) parameters are adopted. The optimal intents calculated by each NG-F S consists of “overfly” 4D waypoints, in a number between 3 and 30, towards the exit points or towards a merge point – the ILS Final Approach Fix (FAF). Two 4DT intents are initially calculated for each traffic: an optimal trajectory for minimum fuel (F) and an optimal trajectory for minimum time (T). No time constraint is provided to the aircraft before the first optimisation process, so the downlinked intents provide a desired time of arrival at the exit points or at the merge-point to the 4-PNV system. The details of the inbound traffic are summarized in Table III.
TABLE III. PERFORMANCE COMPARISION
ID Position Intended Arrival 4-PNV Solution
403 51.4518N 0.1041W T: 83 s | F: 103 s 93 s
401 51.2964N 0.3187W T: 159 s | F: 165 s 193 s
402 51.3288N 0.0276W T: 141 s | F: 184 s 293 s
404 51.7146N 0.2601W T: 180 s | F: 183 s 393 s
The focus of this simulation test case is on the arrival sequencing problem: the single landing runway available implies that not all traffics can be cleared to overfly the merge-point at their originally intended time. The merge-point, in particular, marks the beginning of the common approach leg, where strict longitudinal separation is enforced. The common approach leg has been modelled as a typical ILS approach profile, starting at 9.5 Nautical Miles (NM) from the runway at 3000 feet. After the initial intents have been stored in the 4-PNV, the point-merge sequencing algorithm allocates the available time slots accordingly. Considering a minimum horizontal separation of 4 NM on the ILS approach and approach speeds around 140 knots, the generated time slots on the merge-point are characterized by a 100 s separation. The resulting scenario is represented in Fig. 11.
Figure 11. Validated intents.

The processing time averaged at 84 seconds after 10 simulations. The lowest computational time was 89 seconds and the highest was 302 seconds. Again the discrepancies in the time are put down to running the simulations on a non-dedicated system. The processing time grow approximately exponentially as the number of aircraft increase, which is in line with the literature consensus [17].
VI. CONCLUSIONS
The conceptual design of a novel NG-FMS/NG-MMS was presented, providing 4-Dimensional Trajectory Optimisation (4DT-O) and air-to-ground trajectory negotiation/validation functionalities with NG-ATM system to support future intent based operations. A detailed functional architecture of the NG-FMS suitable for both manned aircraft and UAV platforms was described. Suitable mathematical models were developed to implement the 4DT-O capability, addressing both the deterministic and stochastic trajectory optimisation problems. Pseudospectral and weighted sum methods were adopted to carry out real-time multi-objective deterministic 4DT-O. Objectives such as fuel consumption, time, noise impact and contrails were considered via an appropriate set of performance weightings. Investigation of the total system error boundaries was conducted to evaluate the effects of uncertainties propagation in the aircraft dynamics model. In addition, air-to-ground 4DT negotiation algorithms were developed, aiming to a “single-attempt” trajectory validation process. In line with the SESAR and NextGen concepts of operations, a near-real-time validation process for dynamic rerouting was implemented.
Simulation case studies were performed for three different flight phases and the results demonstrated the functional capability of the NG-FMS to generate cost-effective trajectory profiles with a reduced environmental impact, satisfying the ATM operational constraints in quasi real-time (less than 120 seconds required for trajectory re-planning). Finally, a family of stochastic trajectories was obtained and it was compared with the reference trajectory computed for each of the three different flight phases. Comparison of the NG-FMS trajectory error budgets with the applicable RNP thresholds demonstrated compliance at the 2-sigma level. The 4-PNV simulation cases have also been presented. The processing time required to elaborate a conflict-free solution (i.e., a validated trajectory for each aircraft) is below 180 seconds for up to 10 aircraft in a Terminal Manoeuvring Area (TMA) environment, accounting for both arriving and departing aircraft over a ten minute timeframe. In high density air traffic conditions, the complete process of NG-FMS intent generation, downlink to the 4-PNV and negotiation/validation is performed in less than 300 seconds. These results meet the 10 minutes timeframe of typical online tactical routing/rerouting tasks and make the ENDEAVOUR approach feasible for the intended applications.
ACKNOWLEDGMENT
The authors thank, in particular, the Avionics and ATM research team members at Cranfield University for their support in carrying out this research. We would also like to acknowledge, in particular, the Clean Sky SGO partners for their involvement in the development of GATAC.
REFERENCES
[1] Advisory Council for Aviation Research and Innovation in Europe ACARE), “2 8 Addendum to the Strategic Research Agenda,” 2008. Available online at:
http://www.acare4europe.org/sites/acare4europe.org/files/document/ACARE_2008_Addendum_1.pdf. [Accessed 18th February 2013].
[2] Advisory Council for Aviation Research and Innovation in Europe ACARE), “Strategic Research & nnovation Agenda (SRIA), Volume ,” September 2012. Available online at:
http://www.acare4europe.org/sites/acare4europe.org/files/attachment/SRIA%20Volume%201.pdf. [Accessed 12th April 2013].
[3] W. Gu, R. Navaratne, D. Quaglia, Y. Yu, I. Madani, V. Sethi, H. Jia, K. Chircop, R. Sabatini, and D. Zammit- angion, “Towards the development of a multi-disciplinary flight trajectory optimisation tool – GATAC,” AS E Turbo E po Conference, Copenhagen, Denmark, 2012.
[4] M. Xuereb, K. Chircop, and D. Zammit- angion, “GATAC – A generic framework for multi-parameter optimisation of flight trajectories,” AIAA Modeling and Simulation Technologies Conference, Minneapolis, Minnesota, 2012.
[5] SESAR JU, SESAR Consortium, “ odernising the European Sky,” Brussels, Belgium, 2011.
[6] N. Barnier, and C. Allignol, “Trajectory De-confliction with Constraint Programming,” The Knowledge Engineering Review, Cambridge University Press, 2009, pp. 1–15.
[7] EUROCONTROL, “Trajectory Negotiation in a ulti-sector Environment,” Programme for Harmonised ATM Research in Europe (PHARE), Brussels, Version 1.1, June 1998.
[8] M. R. Jardin, “Real-Time Conflict-Free Trajectory Optimization,” 5th USA/Europe ATM 2003 R&D Seminar, Budapest, Hungary, 23-27 June 2003.
[9] C. Tomlin, A. Bayen, Y. Ye, and J. Zhang, “ L formulation and polynomial time algorithm for an aircraft scheduling problem,” Proceedings of the 42nd IEEE Conference on Decision and Control, Maui, Hawaii, USA, December 2003.
[10] J. Erickson, “Algorithms Course aterials. Lecture 29: NP-Hard roblems,” 2009. Available online at:
http://www.cs.uiuc.edu/~jeffe/teaching/algorithms/. [Accessed 1 Aug 2012].
[11] R. Sabatini, T. Moore, and C. Hill, “A New Avionics-Based GNSS Integrity Augmentation System: Part 1 – Fundamentals,” Journal of Navigation, March, 2013, pp. 1-22.
[12] R. Sabatini, T. Moore, and C. Hill, “Avionics-Based Integrity Augmentation System for Mission-and Safety-Critical GNSS Applications,” Proceedings of the 25th International Technical Meeting of The Satellite Division of the Institute of Navigation – ION GNSS 2012, Tennessee, USA, 17-21 Sptember, 2012.
[13] L. Rodriguez, R. Sabatini, A. Gardi, and S. Ramasamy, “A Novel System for Non-Cooperative UAV Sense-and-Avoid,” Proceedings of European Navigation Conference 2013, Vienna, Austria, 2013.
[14] J. Lygeros, and M. randini, “Aircraft and eather odels for Probabilistic Collision Avoidance in Air Traffic Control,” Proceedings of 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 2003.
[15] S. Ramasamy, R. Sabatini, Y. Liu, A. Gardi, L. Rodriguez, and D. Zammit-Mangion, “A Novel Flight anagement System for SESAR ntent Based Operations,” Proceedings of European Navigation Conference 2013, Vienna, Austria, 2013.
[16] EUROCONTROL, “User anual for the Base of Aircraft Data (BADA), Revision 3.8,” Brussels, Belgium, 2000.
[17] A. Globus, R. H. Jacoby, T. Prevot, and J. K. ong, “Rapid Generation and Utilization of Four Dimensional Trajectories for Air Traffic Control and Management Applications in ACS,” Proceedings of AIAA InfoTech 2011, Missouri, USA, 2011.