:o:-i:!:::i:i:i:i::i:!:i'.i:i:i:!:i:i:i:i:i:i:i:!:i:i - ibiblio...project apollo lm powered...
TRANSCRIPT
I i .....
:o:-i:!:::i:i:i:i::i:!:i'.i:i:i:!:i:i:i:i:i:i:i:!:i:i:!...:.:.:.:.:.'..:....:....:.:.:.-..:,,.,...:.,.,:,:,:,:,:Z
.-4
OZ
r"
m
OZ
Z
"0
m
z
-4
-4
OZ
Ld_._ _ qlb _

MSC INTERNAL NOTE NO. 68-FM-74
PROJECT APOLLO
LM POWERED ASCENT TRAJECTORY FORTHE APOLLO LUNAR LANDING MISSION
By Joe D. Payne, William C. Lamey, and Burl G. KirklandLunar Landing Branch
March 20, 1968
MISSION PLANNING AND ANALYSIS DIVISION
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION
MANNED SPACECRAFT CENTER
HOUSTON, TEXAS
Approved: /,_'-_ ';L_:: /.."_-_--I_loyd V/)_ennett, ChiefLunar Landing Branch
Approved: _ _ -,John I_}I Mayer, ChiefMissio'_ Planning and Analysis Division

T
tlb

FIGURES
Figure
I
3
6
Time histories of IM trajectory parameters during
powered ascent
(a) IM altitude ....................
(b) LM altitude rate ..................
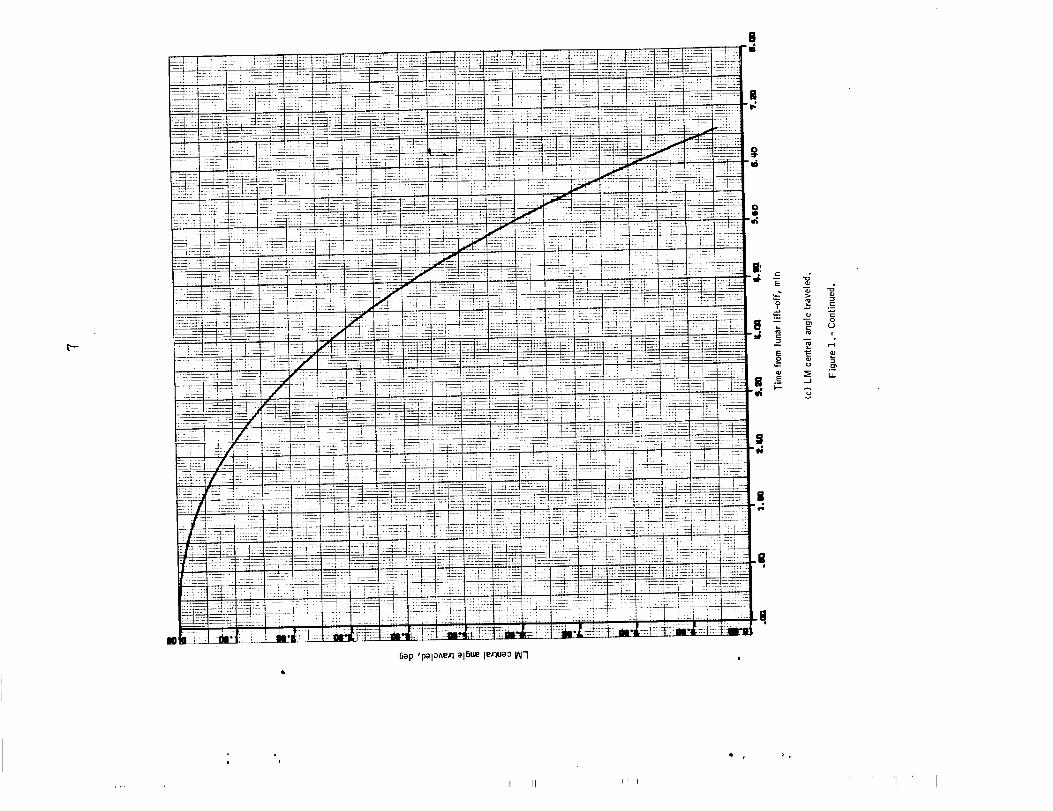
(c) IM central angle traveled ............
(d) IM velocity ....................
(e) IM flight-path angle ................(f) LM thrust angle (pitch) ..............
IM altitude rate versus altitude during powered
ascent ..... • • ..... • • • " ........
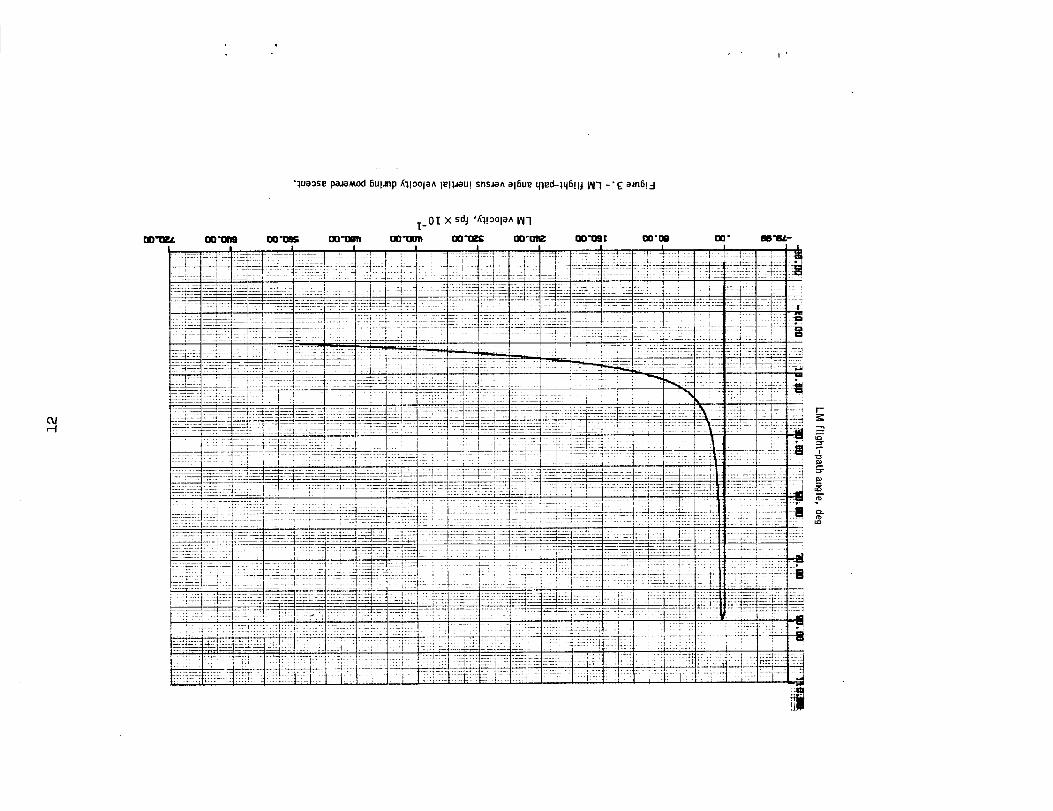
LM flight-path angle versus inertial velocity during
powered ascent ........... • ........
Time histories of relative IM-CSM parameters during
powered ascent
(a) IM-CSM range ....................
(b) IM-CSM range rate .................
(c) IM-CSM phase angle .................(d) IM-CSM angle from local vertical ..........
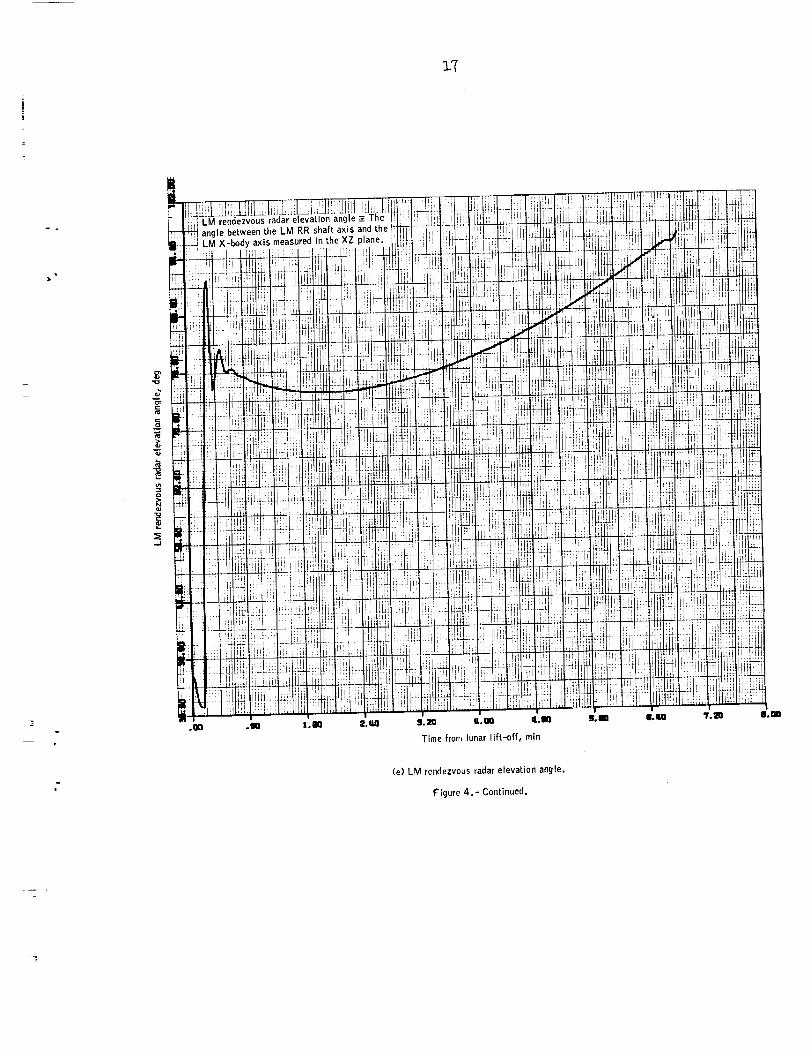
(e) IM rendezvous radar elevation angle ........
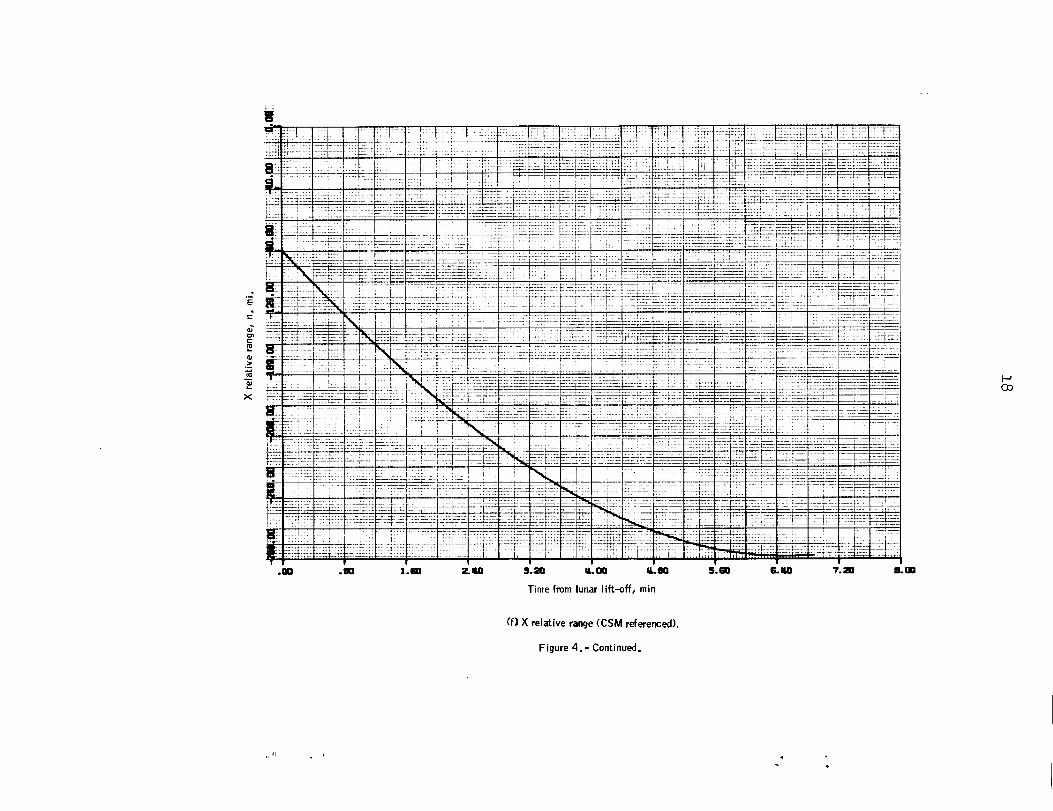
(f) X relative range (CSM referenced) .........
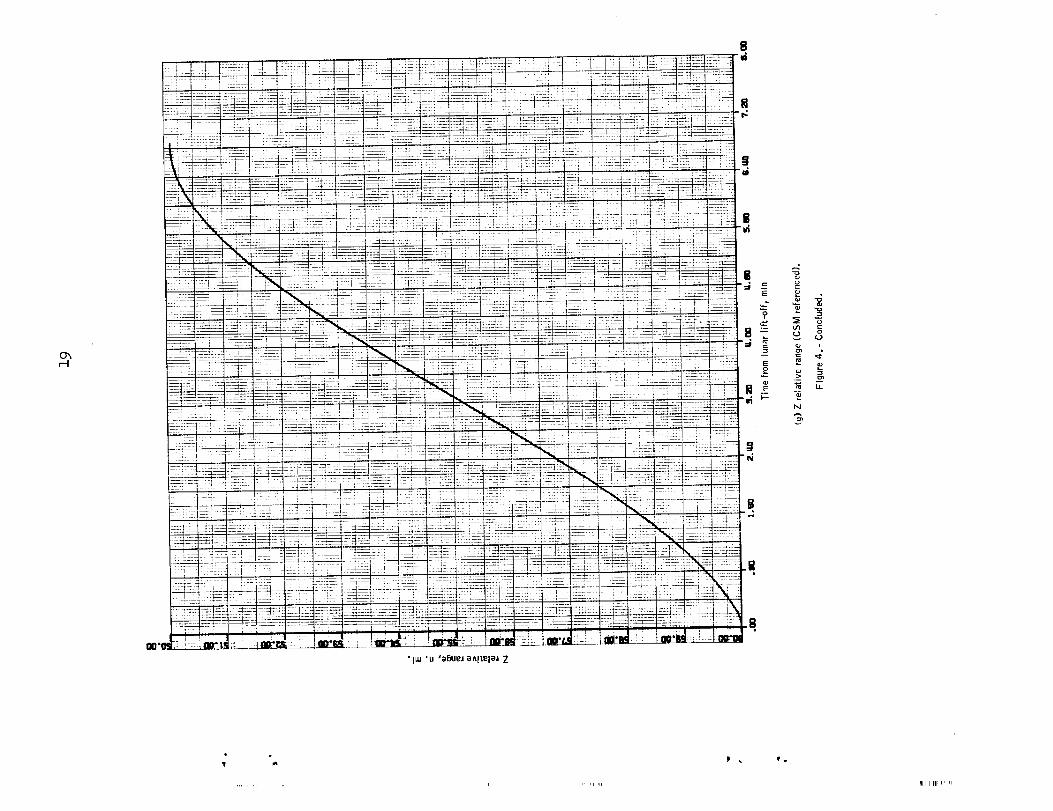
(g) Z relative range (CSM referenced) .........
Z relative range versus X relative range during
powered ascent (CSM referenced) ...........
LM-CSM range rate versus range during powered ascent. •
l_ge
56
789
I0
ii
12
1314
1516
1718
19
2O
21
iii

V

LM POWERED ASCENT TRAJECTORY FOR THE
APOLLO LUNAR LANDING MISSION
By Joe D. Payne, William C. Lamey, and Bur! G. Kirkland
SUMMARY
This document presents the LM powered ascent trajectory for the lunar
landing mission. The LM ascent utilizes a two-phase guided trajectory toachieve an orbit characterized by a periapsis altitude of 60 000 ft and
an apoapsis altitude of 30 n. mi. The total characteristic velocity ex-
pended during the ascent to nominal orbit insertion is 6012 fps. The nom-
inal ascent trajectory duration is 412.7 seconds.
INTRODUCTION
The last official publication containing the nominal lunar ascent tra-
Jectory was the "AS-50hA Preliminary Spacecraft Reference Trajectory"
(ref. 1), published July l, 1966. Since that time, there have been updates
in LMweights and engine performance data (ref. 2), and refinements to and
better definition of the onboard ascent guidance equations (refs. 3 and 4).
An unscheduled document (ref. 5), whose purpose was to describe the
data format planned for use in reference trajectory documentation, was
published February 16, 1968. It should be emphasized, however, that this
reference was not intended to be an official trajectory document and,
hence, did not reflect recent data and guidance equation changes.
The purposes of this report are to present the revised LM powered
ascent trajectory incorporating the latest available data along with the
latest guidance equations and to serve as an interim ascent trajectory
reference until the scheduled reference trajectory document is published.
Data describing the trajectory is defined in the tex_ and is presented in
tabular and graphical form.
i
DEFINITION OF THE LM POWERED ASCENT TRAJECTORY
Operational Phases
The LM powered ascent trajectory assumes an in-plane launch into a
60 000-ft (9.88-n. mi.) by 30-n. mi. orbit about the moon. The ascent
consists of two operational phases, a vertical rise phase (approximately
10-seconds duration) and a near-optimum guidance phase. The purpose of
the vertical rise phase is to obtain sufficient altitude for terrain
clearance prior to pitch over to the ascent guidance attitude. This phase
terminates on the first computing interval after achieving avertical ascent
rate of 50 fps. The near-optimum guidance phase is designed to insert the
LM into the desired nominal lunar orbit, which allows for completio_of
LM-CSM rendezvous in about 3 hours. Rendezvous maneuvers are performed
using the LM reaction control system (RCS). The LM-CSM phase angle at
insertion is 15.91 ° in this simulation.
Guidance and Targeting
The primary guidance and navigation control system (PGNCS) is used
to guide the LM into a preselected orbit. The ascent guidance uses a
fixed-thrust linear guidance concept (refs. 3 and 4) to control the powered
ascent to specific insertion conditions. The desired orbital conditionsat insertion are an altitude of 60 000 ft above the lunar launch site and
an inertial velocity magnitude of 5510 fps. The PGNCS guidance has posi-
tion control in the lateral and radial directions until the time to go
(T ) becomes less than l0 seconds. After T reaches l0 seconds, positiongo go
control is eliminated, but velocity control is maintained. When Tgo
reaches 4 seconds, the PGNCS initializes a_special timer to command engine
shutdown.
The time-to-go equation, included in the ascent guidance, contains
a parameter which is referred to as the Tg ° constant (KT). A change in
the value of this constant is reflected by a change in the shape of the
altitude and altitude-rate profiles and a change in the Characteristic
velocity required to achieve nominal insertion conditions, After consider-
able study (refs. 6 and 7), it was determined that KT should be assigned
a value of 0.5. The official source for guidance constants (ref. 4) now
reflects this value for KT; and is, therefore, used here.

POWEREDASCENTSIMULATIONDATA
t
Weight and Performance Data
The weight and performance data used to generate this trajectory were
obtained from reference 2. Table I gives a brief summary of these data.
The thrust used in simulating the ascent burn is the effective thrust
considering +X axis RCS thrusting for center-of-gravity control. The RCS
interconnect is used during ascent for center-of-gravity control; thus,
an average ascent burn specific impulse (Isp) is used. The ascent AV
budget of 6060 fps, which is now under configuration control, is a result
of a study documented in reference 8. This AV budget is confirmed by
reference 2 and was adhered to in designing of this trajectory•
TraJ ectory Data
The conditions achieved after a nominal ascent to insertion are listed
in table II. Time histories of trajectory parameters defining the LM
ascent are presented in figure 1. It should be noted that the oscillations
in the LM thrust angle [fig. l(f)] reflect the attitude damping by the
ascent guidance. The digital autopilot (DAP) was not included in this
simulation. Since the DAB affects attitude response, its inclusion in
the simulation would change the attitude damping characteristics. This
area will be explored further when hybrid simulation capabilities are
completed. Figure 2 shows the altitude rate with respect to altitude.
Figure 3 shows the inertial flight-path angle as a function of inertial
velocity• Time histories of the relative LM-CSM parameters are given in
figure 4. The X and Z relative range plots [figs. 4(f) and (g)] are ref-
erenced to a curvilinear coordinate system whose origin is at the CSM.
The fact that the X relative range is negative and the Z relative range
is positive means that the LM is behind and below the CSM. Figure 5 pre-sents Z relative range as a function of X relative range. Figure 6 shows
the LM-CSM range rate versus range.
CONCLUDING REMARKS
The LM powered ascent trajectory for the lunar landing mission has
been redesigned as a result of recent changes in LM weights and performance
data. These data changes also necessitated a reduction in the CSM lunar
parking orbit altitude from 80 to 60 n. mi. As far as the LM powered ascentis concerned, this altitude change affected only the time sequencing of the
LM-CSM rendezvous; and, is reflected in the relative motion plots. This
trajectory should be used in engineering simulations as the nominal LM
ascent trajectory for the Apollo lunar landing mission until it is super-
sededby the reference trajectory document.

TABLE I.- LM POWERED ASCENT WEIGHT AND PERFORMANCE DATA
Tots1 weight st lunar llft-off, lb ............
APS propellant (for AV = 6060 fpe), lb . . . . . . . . , .
APS and RCS effective thrust, lb .............
APS and RCS 8versge Isp , sec ...............
lO 729.0
4 962.0
3 627.0
303.4
TABLE II.- IM POWEKED ASCENT INSERTION CONDITIONS
Burn time, sec . . . . . . . . . . . . . . . . . . . . . . .
Burn src, deg .........................
Thrust sngle (pitch), deg ..................
Insertion phase 8ngle, deg .................
Insertion velocity, fps ...................
Insertion 81tltude, ft ...................
Delta V, fps ..... , ..................
Propellant used, lb .....................
Insertion weight, lb ....................
412.686
9.47
-5.44
15.91
5510.0
6O ooo.o
6011.74
4933.44
5795.56

i I liLi,
ei •_' . _ -._ ...... _............ _-=._,- L_:_-,_ .... 4-. _:_4-,_:_._:L, .::_ _ I_LL. _ _,i_ : _i _:_ ._,:: _:=H-: ::_!!::_ :i_:::
' :::E: :-- :_ --: :_-[::÷:_: c-:_::::: -_ :_: i '-:_::;:1_-.::::_/_-:'---Fr'T _::: .............._ '-i2:____f_-_ .......... :_
* ,: ', ............................ _...... _ ............ i.... I..... :_ ..... :_...... ,........... _ ....
._ .IO ].IO _.liQ 9._0 L. 08 IIL.O0 S.IO _.ILO 7._0 LO0
Time from lunar lift-off, rain
(a) LM altitude.
Figure 1.- Time histories of LM trajectory parameters during powered ascent.

vb
t-
_ __ 4:==_+_:=:J_+_,+,.....-:_+_!+-_,,,_,_:__ _,,_:_,,_:_ < _ :_F<_!-=5:!<_:_- = :_:::F_ {=_=+_=== :-!]-__ : - ] n<::I_7_::- ::;:_ ------.... _::_
-:__i=_i__i !--:--:-:%-_I:_-M:_: :_i_!_- _:--i:::_:_+_::-:--::=]_- _ _1%!!=q::%:::,÷:!i::-,=_:,!<:L::,_2:
.... k -- +-- / i / __ _ ...... :Z:::! .... _ 7:[:: :n _ :iT:L: ;[:f -
--_-_--+_--_ "- : --1 -- } _[ .... ] ', | { - Jil_+ - { .J_7:::_;; }_I 1:2: 11_ 7 - _ : £ 7---11 |1 : _: :if:l:
_:.---7___--:_:==--:--_}:==_:=--:_:-}::_---=._::,==+f]= :_:-----=---==::::=_i ....::= i _:::=] + i_[ 7_ .-:I i_:ZL, I-- _ .<- ] - , i n ................ 1:_ 1= _ : _.... Z-: "=: :::...... : ...........
--_t-L=_4=----'-_=-__-:----=___:=_---_-:--=.::= ==q : 1 .....::==::......
..................... 1 i - 1 _ .......... + .... .............. ........... :_: = Z:[I I' ] Z _ [++++++++ +++.......++ +++........ ++=::
:: - - T<; : _ T " +4 '_ [ _::_- + -'"_:------:-_ ...... _ -++ : : 7 +: :: :::_: -:_ ...... : d ........._ ......+.......... ++1: :!::+:" ':- +: _ ................ +:::I+<t.::+++: ..........i:::+ :
'] _+: ....... ,:::_ ::: :7-:_ _:::_:: -::l=-_-m:::r -_ .... ::-::--_"_j_{:::_--,-_: ::::::::=:-: _]: =: ::_._-:-::--: ::::t:: ::::: :+: " I:::: ::::::_:: ::: ;::_ :!I ; -"+ _ ++ _ .... 1.... ::: :I......_.......... ] ...... ,:: :d..... ,......... +...... I--:-=-::4:_-
"-T-I_ <-I:-+=u_++:J_:+4__- i: _ _- !:_:::t:- :!:p:_.-:!j+_::.i:-+_:i+:_f:_: :: :-t_:::_: {: :_l :7_=,1-" _+-- " _ " I _ ]" + ::::: { _ _ _ " _ -- " _ r :__t' :_._ iN::::I .... :::2 ......... +-:=:: :_ ......... ]: i:_ !: i :::J::: i_-i : .........
_ :::=: t • I- " .....:' _ "_ :' :,,4......... _ 4: ,4:.,_......._ ............... +:4_=- + _-,, + , •: 4 - , .... _, ] -.L4-= ::..t::_....... -::: = ........... " <::' .......+-._....I:: ,...... +......II
_ap 'pala^R.q al6Ue teJ:lua:) It,{']
!1 II

'I,0
x
_J
E
RE-_-t i:. [:E_ ,F._ _: !: ::7 :-_f: _ _:: :: ::: : :_ :: t _ _-':-'- _: _ =: ::u--: :: =: _= : : r:-:[_: :-"H: ;::t;:i:_ i ::: : _D4::_ :;z.__r:_:] ::: _. :_z__:_: F:: :F:t: J'r_-F_;::::_-_t:/_E -_
u:: !:'.:" :! ,' _'! _!. .......... L"_ ....... [I I'!I!_.I : 'I .... ! I_L 'i . _'/_:_.i
m:! ": 'F _ i " '_ :':" ' :: . ; ' : ; ' _ . _ r " | " ' . r" 't-' | • '- _ --I _ " wI .... u'- ' ....... _T " : , : - _ -:-:s:_z
' , - - r t ,,.L L:: [:h]-L 7- _L: .: .... i..:-] _:.-L-..... i: :.::.:........LIT.I:I.:.:___.= _........ i[_]:__:_-L _ __-:= .. -:.:_ 1:-v
: ::::::: ..............:::+::::;.......F:::F-::_.... :::': ...._:t..........;..................;1:;.........:÷: _'-:--: '!-_--:: ::_ ..........;:_: _:=:_:=f_-_:F::;:_-
...................................... _- -''::_::'::"_,_ ::_-:..-:-r:*: .+=T_ _'*_';:= ::::::::::::::::::::::::::::::: .... F.-:-
.m .10 _.m _ 5.111 L.08 LIB S.m Lira "_.lm L_.
Time from lur_,r liK-..off, rain
(d) LM velocity.
Figure 1.- Continued.
co
i

• 4
l iilii iL_i I
I"o
.-I
5._ L nn uBQ
Time from lunar lift-off, min
(e) LM flight-path angle.
Figure 1.- Continued.

"q r-
g
i
LM thrustangle, deg
- igll[:!: ! ll_ll_i! :_: 'lih_ i!_-K: : |GW_' i !ll,llti: L. _!itP,lt : Oll_W ..... _m: i ::Ip_ilI! __i:i:i!ll
, [::_:.Z:[_:::[LxIL..L::[_._:__:::[z::j__:[:[::2:L_tL::::L:::z:x!:x:::2L_:.Z.:X:.::L:L:.:[..:::+I...:+:::X2]]:_I.X:[:+:,::::[[:.a i:w,.]...Li,l.i:WI.,L2.LZL:
g
-I........Z:L_V.:i:L:-2-!:::2:Z:L-_:2.JCLi:12L:.,2,.y.:LI::I::222L:::_----_=::_-
::::::::::::::::::::: :::.::_ :::: ::: : : : i;: ,: :: ; .' :; ::x::::::: :::_::::_: ::_::::::'. :::::: ::::: : : :::',:':4 : ;::: =========================== -
::._ .... G:--F:_: :::I::a ....................... :.............................. ...... _............... --_ ..... _....... ;.... "...........;-'-..... _:=
...._-----._-:-: __C ;_--_ _-_...L_:.:_:;_:::;;:_::i;;;;:;_i;:_:;1;!:._;_:L_i_;C.;L;;;_;--_---_i-:___ l]-C. C __-p_:-::_::__--_-._7:il_
:,: _L . ...: L,L: +: _ i:;7 _-_ :_E:: :::::::::::::::::::::::
:i.:: :::::::_ _:::!::: :::: :: :: ...... : ::::[:_!i: ::_..... --,_.:i.i{ili ::i:;!!;_: ::F:i::" _::i :_ _:_X::- :_::F-._:::i_C___:i_::F::_:::_-:_-ii:h:_-_
II
I,M
i,-i0

,,_1
Figure 2.- LM altitude rate versus altitude during powered ascent.
•luaose paJaMod5u!Jnp _l!_ola^ le!_au! snsJa^al6ue q:led-lq6!lJIN-I -'_ aJn6!d
OJr'-I
r-
.,,
'T
a-

r_
• _uaose pa_aMod 6u!_np s_alamRJ_d I/_S3-1fll-I aA!_elaJ jo sapols!q awU. - "b _un6!cl
• a6ueJ I/_SO-IAI1 (_)
r
k
,i i I I

.--t-,-4
sd_ 'e_e_ a6ue_ IAISD-IAI'I
d
o=i

v
w
==
U3
--I
F_
Time from lunar lift-off, min
(c) LM-CSM phase angle.
Figure 4.- Continued.

LM-CSManglefromlocalvertical,deg
!
O_
m
i
i.J
,Ll,i!,iiand the
plane.
!!
_H
iii
_L
H
Iii
;I
!
:I.II_
(e) LM rendezvous radar elevation angle,
Figure 4.- Continued,
I_° IIU
liii
_HH!llil
li
E
c
X
i -
il
_,-_: i_:.:: :':: i=:::::::_::: :::::L_:I:: '::i [:::i :.i_:': .... 7::::i:': iiii::;:: _i:::i_::i ::i_:_i:-fiiT:Li-:,J ,:::ii:_i:...........i:..........[3c..........._::::!::._,.i.::
,...... _......_:::............_p:=-==_...... _......................_-::.f=-...............:......_..............._...........:=:t::::_P:_......._..... ,=-
_:: -: ......... t........ =_=:-==,:==!::=_:---::.. ......... _-::[-=: _--=:==- =._-_ .... _ =_== =r:= =:_= .... - =:_ ...... =_-::'-.... _.: _ ............... _...............[-.-..-,........:*:-- --7-- ,--f , " :=_ --=' -Z: .......r........:.... i_ _ :_:3
......_::::i.:i:-:=-_::: : :_:! .... -:::_:::::I:: !-=:-: ...._ .... _, :==; _::::::=:I-_.:::_ !_:_'_!=:_:::':.........._:::::I:-::_......
_: :33::!i;:7_i_7:;: _. :3- :!:-3-t -:::7 : : [ i 7i:::i::L i: I ;:::_-3_ !; i777k:7:7 717 :÷_3_ :][3 1:7:7_:711:_...............
,_:=:[-==P:-:::::t:=:_:-=; ............ -p:::[ ............ r ....... :=::: " ................ :..... '==: , _---= - ..........: _-=F===-:---: =-..... f-- --_--
_11{.i:'i:' ::_ i: ::i t • :[:m:::_:_::-:-_"'_ :: l"_:_{::: .......... l: ......L::.:: d:::::l.4::;3_::-__-':_::_,:::: ;: _ffiff:i _ i:- i -1_: ' _-I:'773-_t_"Tl--'-:_GU:_7_ :i_= ::=====================================:::_[::::=_-- :
. IO .!_ l.il Z. fill _1. ill ILIii I1.. lib _°il !_1_ ?.Z! IL nn
Time from lunar lift-off, rain
Cf) X relative range(CSM referenced).
Figure 4.- Continued.
Co
C_r-I
o
z#)o
r._ r.,3
'_ u_
l_J
......... i i i,r ,i _i IIIIII l_I r,' ,!

•(pa_ua_ajaJ IAIS0) _ua_s_ paJaMOd6uNnp a6uEJaA!lela_ X snsJaaa6ue_ aA!lelaJ Z -°_ aJn6l.-I
n
_] °rN=:_
1;i
J_L
[Ii!
i;t}
iFiliiii
ilil
iTTi
iili_TT_
iUilH
!iF
;!!
PI
_H
QO'OII--
_:_
t.il;rll
HHH_4
tit"iF I
TT_T
:rl;U
i_r: i :
i:f !: !
' -T---!
i'. IH:I:
,Nd ._: t 1
J! tii
ili:TTI_!!:Iii i
77_7!!il!!;' iII!;
r:i!t-H
itHl
i-iTI!i]ih]ii i
J_qT,:,l_H,+H*
111:l't:
:!:i!, t
:_iiHi!. t,iil!!: :_:
:ii!ii _
it ;i!:': i___!:i_Tii1i
1::_i_ill ]
!iii_I
!ii._
ii,,_Ji!iTTT
; Z !t;-H_
N
E
t_
itl
"4,
g
o_

...... '_[,I1 ,i 11 i I i i I i
LM-CSM range rate, fps X i0 -I
m:
r_........ ri_ :.,_x ..... _. I .... ::T:::-_ .:-, !: 2: :2: : ;7 x:K: : _ ::_: :: ;LI : i: _2. ::_:_ : :_ :_ :] -;:
.k TZL2'_--["-L--I---_ ...... £ 71 1:_ ;--7:2 ....... :.'7Z [2:_-- *- -- 1. _ + h __:"
o --. ..... _.-. : ........ __ .... ,....... _ ....... _k_-:+. ._ - _ ..... ._--
'_ _= I -:_:-_ _ 7_77{-._-_77t:Ti:::7_-i:--7:m÷ _i:-:-_:_ qT_-rZ1-i1_'7:1i_71:IT-:::::::!-:: _: :: 7:-:-7U%-......LL_: _:: ':
- _ T t' , ...... ;_ : :: ZTr:_t::TTr :: :--_m m::_:_:--:"-_- :--: _2_ : ___::;:2L-mj----:; 2_2 _:12 .
:L::, :" 1 7.-. - :ceLT: : _::-:_: 4: 2t ...... _2::" --- F_:_-, ....... 1- b---7_ --' : _ ..... _:-- - "'G:::'_::
_r: :: -- : _ : 1::: : - ,:: :i _ : ::=r: _:=::_ t- :-_ :-FIT: :_-t-_: :-m___: ::_k-_ --_--:Z_-L- _-t__=::_:_-_,-:
• .... _ ...... __ X::_7]_ , :Z7: : F :£ _ ...... _:LL: ::ZI'LCT:£- TL:Z:[: 7 ...... _-71L: iLL 77_ :_3 • -- t?:
_4 :qk::: _FT T p-_:* : :t *:- r-:r::-rT:l _._ -:---:b : :_k::_:::_.-_ :t::_p:r ....... _ .= - x I - i ¢ r ,
!

22
REFERENCES
.
.
,
,
.
,
,
.
Mission Analysis Branch: AS-504A Preliminary Spacecraft Reference
Trajectory (U). MSC IN 66-FM-70, July l, 1966. Confidential.
Low, George M.: Apollo Spacecraft Weight and Mission Performance
Definition. December 12, 1967.
Payne, Joe D.: Comparison of LM PGNCS and AGS Orbit Insertion Guidance
Logic and Procedures. MSC IN 68-FM-73, March 22, 1968.
MIT instrumentation Laboratory: Guidance System Operations Plan for
Manned LM Lunar Landing Missions Using Program Luminary. Section 5
R-567. January 1968.
Lunar Mission Analysis Branch and Lunar Landing Branch: Preflight
Data for a Lunar Landing Mission. MSC IN 68-FM-41, February 16, 1968.
Lamey, William C.: Effects of Varying the Time-to-Go Equation for the
LMAscent. MSC IN 67-FM-133, September 22, 1967.
Payne, Joe D.: Specification of the Time-to-Go Constant for Lunar
Ascent. MSC Memo 67-FM91-8, November 27, 1967.
Bennett, Floyd V.: Revised LM Descent and Ascent AV Budgets for the
Lunar Landing Mission. MSC IN 67-FM-203, December 27, 1967.