observer-based fault detection and identification for...
TRANSCRIPT

Observer-based Fault Detection and Identification for Rotating Machinery
Haedong Jeong, Seungtae Park, and Seungchul Lee*
UNIST

Contents
• Rotating Machinery
• Model-based FDI
• FDI for Rotating Machinery
• Case Study
• Conclusion
2

Contents
• Rotating Machinery
• Model-based FDI
• FDI for Rotating Machinery
• Case Study
• Conclusion
3

Rotating Machinery
• Key component
– Safety and efficiency issues
• Prognostics and Health Management (PHM)
– Data-driven Method (Machine Learning)
– Model-based FDI (Fault detection, isolation and identification)
4
PHM
Hardware Redundancy
Analytic Redundancy
Output Estimation
Parity SpaceParameter Estimation
Observer
UnsupervisedLearning
SupervisedLearning
Data-driven Model-based
Residual Generation

Contents
• Rotating Machinery
• Model-based FDI
• FDI for Rotating Machinery
• Case Study
• Conclusion
5

• Analytic Redundancy
• Residual
– A quantitative difference between target system and mathematical model
– Observer-based residual estimation
Model-based FDI
6Chen, J., & Patton, R. J. (2012). Robust model-based fault diagnosis for dynamic systems (Vol. 3). Springer Science & Business Media.
nonzero if fault existsresidual =
0 if no fault
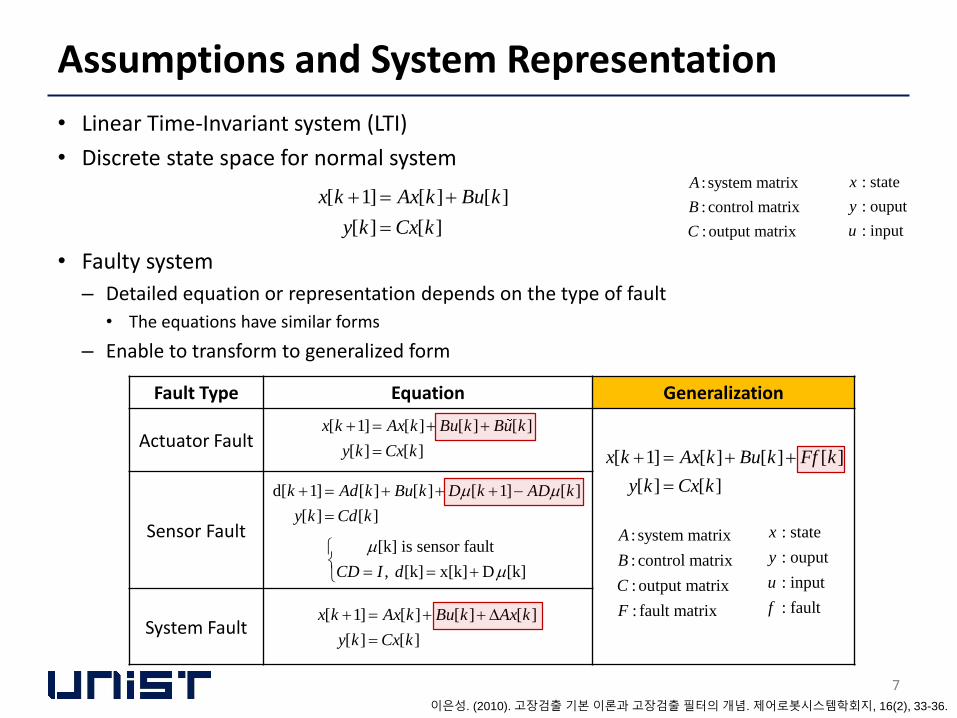
Assumptions and System Representation
• Linear Time-Invariant system (LTI)
• Discrete state space for normal system
• Faulty system
– Detailed equation or representation depends on the type of fault
• The equations have similar forms
– Enable to transform to generalized form
7
[ 1] [ ] [ ]
[ ] [ ]
x k Ax k Bu k
y k Cx k
: system matrix
: control matrix
: output matrix
A
B
C
: state
: ouput
: input
x
y
u
Fault Type Equation Generalization
Actuator Fault
Sensor Fault
System Fault
[ 1] [ ] [ ] [ ]
[ ] [ ]
x k Ax k Bu k Bu k
y k Cx k
d[ 1] [ ] [ ] [ 1] [ ]
[ ] [ ]
k Ad k Bu k D k AD k
y k Cd k
[ 1] [ ] [ ] [ ]
[ ] [ ]
x k Ax k Bu k Ax k
y k Cx k
[k] is sensor fault
, [k] x[k] D [k]CD I d
[ 1] [ ] [ ] [ ]
[ ] [ ]
x k Ax k Bu k Ff k
y k Cx k
: system matrix
: control matrix
: output matrix
: fault matrix
A
B
C
F
: state
: ouput
: input
: fault
x
y
u
f
이은성. (2010). 고장검출기본이론과고장검출필터의개념. 제어로봇시스템학회지, 16(2), 33-36.

Observer-based Residual Generation
• Faulty system
• State estimation via Observer
– Output estimation error (Residual)
• Relation between residual and fault signal
8
[ 1] [ ] [ ] [ ]
[ ] [ ]
x k Ax k Bu k Ff k
y k Cx k
ˆ ˆ ˆ[ 1] [ ] [ ] ( [ ] [ ])
ˆ ˆ[ ] [ ]
x k Ax k Bu k L y k Cx k
y k Cx k
ˆ : state estimation
ˆ : ouput estimation
: observer gain
x
y
L
1
0
ˆe[ 1] [ 1] [ 1]
ˆ( [ 1] [ 1])
[ 1]
C ( ) [ ] [ ]
( ) [0] ( ) [ ]k
k q
q
k y k y k
C x k x k
C k
A LC k Ff k
C A LC A LC Ff k q
Residual
ˆWhen [ 1] [ 1] [ 1]
( ) [ ] [ ]
k x k x k
A LC k Ff k

Observer-based Residual Generation
• Normal case
– The residual value converges to zero-value
• Faulty case
– The residual value converges to specific shape
9
2
0.099 0.011 0 0[ 1] [ ] [ ] [ ]
0.009 0.999 0.009 0.009
[ ] 0 1 [ ]
56.139 0.602 , [ ] , [ ] 5sin( )T
x k x k u k f k
y k x k
L x k R u k k
[ ] 0f k [ ] 4cos( )f k k
1
0
e[ 1] ( ) [0] ( ) [ ]k
k q
q
k C A LC A LC Ff k q

Fourier Decomposition for General Faults
• Fourier Series
– Decompose a function of time into the frequency domain
• General fault signal– Modeling as Fourier series with unknown coefficient
10Lucas V. Barbosa, https://en.wikipedia.org/wiki/Fourier_transform#/media/File:Fourier_transform_time_and_frequency_domains_(small).gif
2
exp expn n
nkR j j
N
Radius PhaseSinusoid
per frequency
2 1
2
2[ ] exp exp
N
n n
n N
nkf k R j j
N
2 1
2
2[ ] exp exp
2 1 2 0 2 1exp exp exp
N
n n
n N
nkf k R j j
N
j k j k j kN N N
2 2 1 1 0 0 1 1 2 2where exp( ) exp( ) exp( ) exp( ) exp( )T
R j R j R j R j R j

• State estimation error
• Output estimation error
Fault Projection Matrix
11
1
0
1
ˆ[ 1] [ 1] [ 1]
( ) [ ] [ ]
( ) [0] ( ) [ ]
ˆ( ) [0] [ ]
[ ]
kk q
q
k
k x k x k
A LC k Ff k
A LC A LC Ff k q
A LC k
k
2 1 2 1
1 1 1 1 1 1
1 1 0 0 1 1
1 1
1 0
ˆ [ ] ( ) ( ) ( ) ( ) ( ) ( )
2 1 2 1[ ] exp ( ) ( ) exp (
j k j kN Nk k kk e I T I T F I T I T F e I T I T F
k j k I T F I T F j k I TN N
1
1) when
2[ ] : fault projection matrix, where exp ( )n
F k
nk T j A LC
N
1
ˆe[ 1] [ 1] [ 1]
ˆ( [ 1] [ 1])
[ 1]
ˆ( ) [0] [ ]
[ ] when
k
k y k y k
C x k x k
C k
C A LC C k
C k k

Recursive Fault Parameter Estimation
• The linear relationship
– Least Square Estimation (LSE) can be used
– The object function and solution
12
e[ 1] where [ ]k kk M M C k
2
1
min e[ 1]n
n k
k
k
J k M
1 1ˆ ˆ ˆ(e[k] )k k k k kK M
Simon, D. (2006). Optimal state estimation: Kalman, H infinity, and nonlinear approaches. John Wiley & Sons.
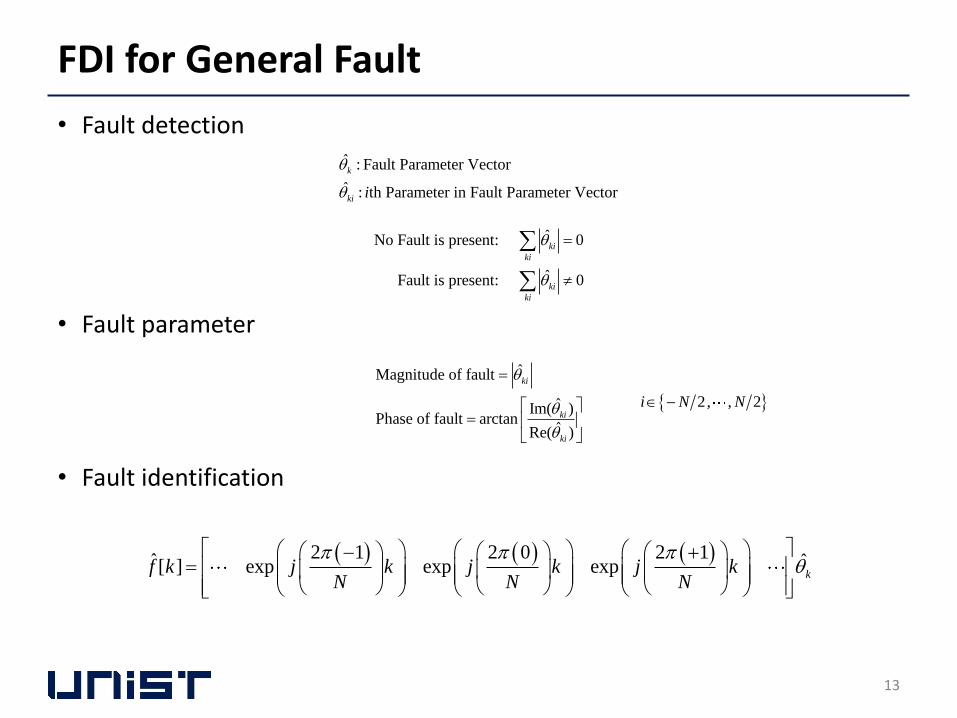
• Fault detection
• Fault parameter
• Fault identification
FDI for General Fault
13
ˆNo Fault is present: 0
ˆFault is present: 0
ki
ki
ki
ki
ˆMagnitude of fault
ˆIm( )Phase of fault arctan
ˆRe( )
ki
ki
ki
2, , 2i N N
ˆ : Fault Parameter Vector
ˆ : th Parameter in Fault Parameter Vector
k
ki i
2 1 2 0 2 1ˆ ˆ[ ] exp exp exp kf k j k j k j kN N N

Contents
• Rotating Machinery
• Model-based Fault Detection and Identification(FDI)
• FDI for Rotating Machinery
• Case Study
• Conclusion
14
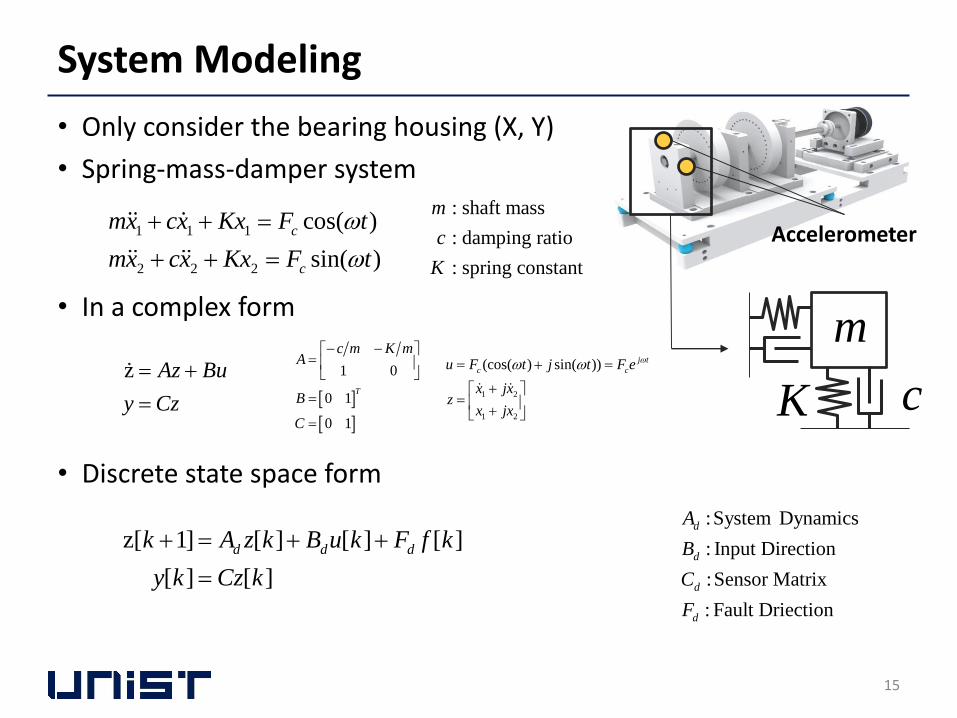
• Only consider the bearing housing (X, Y)
• Spring-mass-damper system
• In a complex form
• Discrete state space form
System Modeling
15
z[ 1] [ ] [ ] [ ]
[ ] [ ]
d d dk A z k B u k F f k
y k Cz k
:System Dynamics
: Input Direction
:Sensor Matrix
: Fault Driection
d
d
d
d
A
B
C
F
1 1 1
2 2 2
cos( )
sin( )
c
c
mx cx Kx F t
mx cx Kx F t
z Az Bu
y Cz
Accelerometer : shaft mass
: damping ratio
: spring constant
m
c
K
m
K c
1 0
0 1
0 1
T
c m K mA
B
C
1 2
1 2
(cos( ) sin( )) j t
c cu F t j t F e
x jxz
x jx

Contents
• Rotating Machinery
• Model-based Fault Detection and Identification (FDI)
• FDI for Rotating Machinery
• Case Study
• Conclusion
16

Case Study 1
• Fault detection and identification
17
[ ] 0.08exp( ) 0.05exp( )exp( ) 0.15exp( )exp( 2 ) 0.1exp( )exp( 2 )8 6 4
f k j k j j k j j k j j k
6 25[ ] 100 where 2
1000
jj k
u k e e
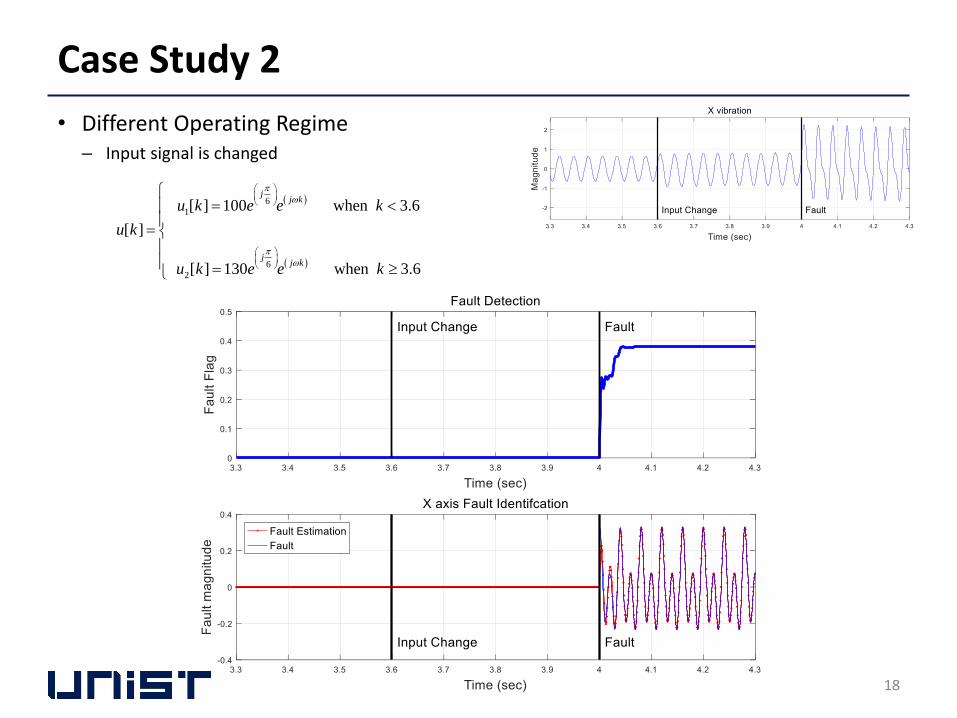
Case Study 2
• Different Operating Regime– Input signal is changed
18
6
1
6
2
[ ] 100 when 3.6
[ ]
[ ] 130 when 3.6
jj k
jj k
u k e e k
u k
u k e e k
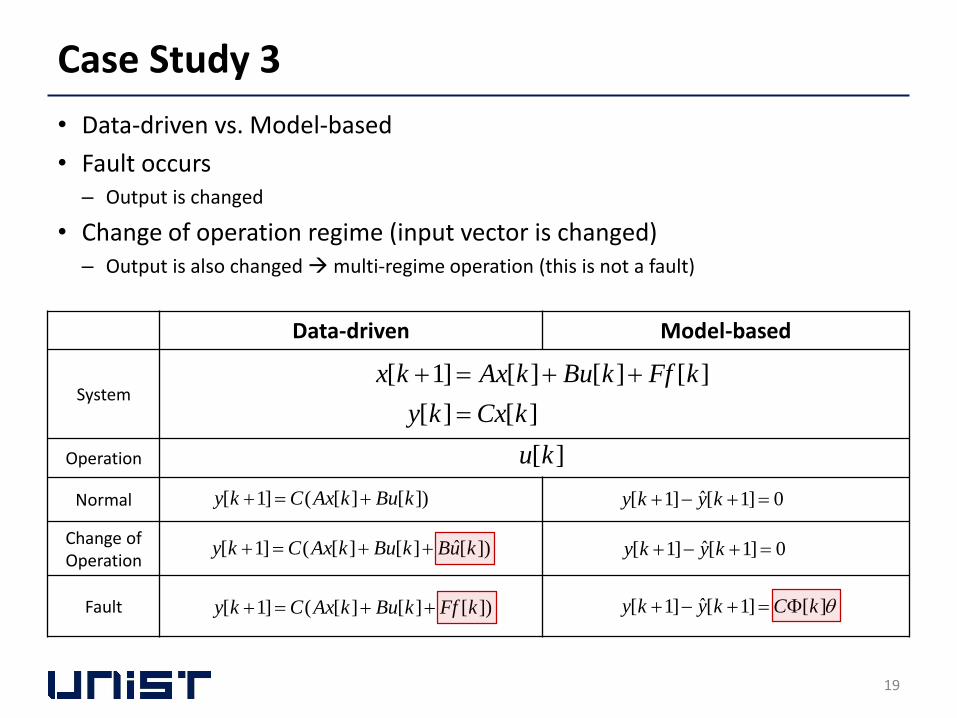
• Data-driven vs. Model-based
• Fault occurs– Output is changed
• Change of operation regime (input vector is changed)– Output is also changed multi-regime operation (this is not a fault)
Case Study 3
Data-driven Model-based
System
Operation
Normal
Change of Operation
Fault
19
[ 1] [ ] [ ] [ ]
[ ] [ ]
x k Ax k Bu k Ff k
y k Cx k
[ 1] ( [ ] [ ])y k C Ax k Bu k
ˆ[ 1] [ 1] [ ] y k y k C k
[ ]u k
ˆ[ 1] [ 1] 0y k y k
[ 1] ( [ ] [ ] [ ])y k C Ax k Bu k Ff k
ˆ[ 1] ( [ ] [ ] [ ])y k C Ax k Bu k Bu k ˆ[ 1] [ 1] 0y k y k

Case Study 3
• Data-driven vs. Model-based
– Under stationary condition
• Observation (Normal) VS Observation (Fault)
• Observation (Fault) VS Fault signal
– Fault detection problem
• Classification problem
20
Dat
a-d
rive
nFD
I
[ 1] [ 1]
( [ ] [ ] [ ])d d d
y k Cx k
C A x k B u k F f k
ˆ[ 1]f k
Signal
Ob
serv
atio
n(N
)O
bse
rvat
ion
(F)
Fau
lt

Case Study 3
• Data-driven vs. Model-based
– Under non-stationary condition (or Transient)
• 1) : The normal state
• 2) : Although the fault occurs, the state is transient
• 3) : The fault state
21
5k
5 8k
8k

Case Study 3
• Data-driven vs. Model-based
– Under non-stationary condition (or Transient)
• 1) : The normal state
• 2) : Although the fault occurs, the state is transient
• 3) : The fault state
22
5k
5 8k
8k

Case Study 4
• Proposed method
– Deterministic study
– But the method can be applied for the stochastic case
• Reduction of the number of basis in the fault projection matrix
• Effect of low-pass filter
23
[ ]k
1 1 1 1 1
2 1 0 1 2
2 2 2 1 2 1 2 2[ ] exp ( ) exp ( ) ( ) exp ( ) exp ( )k j k I T F j k I T F I T F j k I T F j k I T F
N N N N
2 1 2 1
1 1 1
1 0 1[ ] ( ) ( ) ( )j k j k
N Nk e I T F I T F e I T F
The number of basis is determined by sampling rate
Low frequency

Conclusion
• Model-based FDI is introduced
– Observer-based residual estimation
• The fault projection matrix is defined for FDI
• Proposed FDI method is validated through simulation
– 4 case studies
• Future work
– Include uncertainty into model (Modeling error, disturbance)
• Kalman filtered FDI or Unknown input observer-based FDI
– Implementation on testbed
24