obtaining knowledge of genes behavior in genetic...
TRANSCRIPT

22
Obtaining Knowledge of Genes’ Behavior in Genetic Regulatory System by Utilizing
Multiagent Collaborative Computation
Adang Suwandi Ahmad1 and Arwin Datumaya Wahyudi Sumari2
1School of Electrical Engineering and Informatics, Institut Teknologi Bandung,
Achmad Bakrie Building, 2nd Floor, Jl. Ganeca 10, Bandung, 40132,
2Department of Electronics, Indonesian Air Force Academy,
Jl. Laksda Adisutjipto, Yogyakarta, 55002
Indonesia
1. Introduction
All living organisms are built from millions of cells that work together in a very systematic
manner. The trait of each organism is determined by the cells. The function of a living cell is
performed by a sequence of well-coordinated activities by a large number of genes. The
gene itself is a sequence of Deoxyribonucleic Acid (DNA). The products of a cell are made
by the proteins synthesized in accordance with the instructions contained in the DNA
(Willett, 2006) since it encodes all the information required for the development and
functioning of an organism (Emmert-Streib & Dehmer, 2008).
The expression of a gene is a biological process which a DNA sequence is translated to
become a protein. The protein is an important molecule for determining the structure,
mortality, metabolism, signaling, reproduction, etc. of a cell. Some genes influence how
other gene or genes are expressed. Modifying genes may change the affect of other genes.
The expression of a gene or genes is regulated by a mechanism called Genetic Regulatory
System (GRS). The GRS’ task is to control whether genes are active or inhibit.
Of ways for understanding and analyzing the behavior of GRS is by using microarray
data. Microarray is sets of miniaturized reaction areas that may also be used to test the
binding of DNA fragment (Reece, 2004). and it exploits the preferential binding of
complementary nucleic acid sequences to simultaneously measure expression levels of
thousands of genes (Dill, Liu, & Grodzinski, 2009). By having knowledge regarding the
influence of a gene or genes to the others in microarray data, we can make estimations of
the genes behavior in GRS in order to obtain better products in the future. According to
(Ewens & Grant, 2005), there are three basic questions that can be answered by using
microarray data:
a. What genes are expressed in a given sample?
b. Which genes are differentially expressed between different samples?
c. How can one find different classes, or clusters, of genes which are expressed in a
correlated fashion across a set of samples? How can one find different classes of
samples based on their gene expression behavior?
www.intechopen.com

Multi-Agent Systems - Modeling, Interactions, Simulations and Case Studies
476
In this paper we address the utilization of Multiagent Collaborative Computation (MCC) to
model the genes’ interactions in GRS to address questions (a) and (b). Simply, each gene will
be represented by an agent that performs internal activities and performs communications
with other genes as occurred in biological genes. On each interaction time, we can have
knowledge regarding individual gene expressiveness and all genes behavior. The process in
obtaining this knowledge will be carried out by Knowledge-Growing System (KGS) based
on Observation Multi-time Arwin-Adang-Aciek-Sembiring (OMA3S) information-
inferencing fusion and the results will be compared to the MCC results. The comparison
has also been done to ensure the accuracy of the KGS-based MCC results. In our research,
we use data of yeast cycle database taken from [6] as the case study. The rest of the paper is
structured as follows. The concept of MCC and a review of the state-of-the-art of GRS
research will be delivered in Section 2. In Section 3, we present the concept of KGS as well as
OMA3S method that is used as its knowledge-growing mechanism. The utilization of MCC
to GRS as well as the knowledge production by KGS will be delivered in Section 4. Finally,
the paper is concluded in Section 5 with some concluding remarks.
2. State-of-the-art of genetic regulatory system research and the concept of multiagent collaborative computation
2.1 State-of-the-art on genetic regulatory system research The research, studies, and experiments on GRS have been done widely all over the world.
These efforts are aimed to one objective, namely how to obtain the most suitable model in
order to present the mechanism occurs in GRS. In these endeavors, there are two approaches
that have been carried out as studied comprehensively by (Ahmad & Sumari, 2009a) as
follows.
In the first approach the GRS mechanism is directly modeled by utilizing available methods
such as Dynamic Bayesian Network (DBN) based on knowledge growing, weight matrices,
petri nets, artificial gnome model, Neural Network (NN) or its combination with fuzzy
technique such as Evolving Connectionist System (ECOS), piece-wise linear, Boolean, and
power graph analysis.
The second one is to model the GRS by inferring its structure utilizing techniques such as
best-fit extension problem, linear programming combined with supervised learning
framework, DBN, evolutionary computation, graph and Linearized Additive Model (LAM),
steady-state gene expression, Dynamic Differential BN (DDBN), combination of DBN with
Reversible Jump Markov chain Monte Carlo (RJMCC) or with Greedy search algorithm and
Markov Chain Monte Carlo (MCMC), Bayesian and MCMC, iterative algorithm based on
epistemic approach of conjecture and refutation, NN, and combination of clustering
techniques with NNs.
At the time of the writing of this paper, we have not found literatures that study methods in
obtaining knowledge regarding the behavior of genes in GRS in order to estimate their
expression in the future especially that utilizes multiagent approach. This is the primary
matter that will be discussed in this paper. Our hypothesis is by accurately estimating the
GRS behavior in the future we can carry out anticipation actions in order to prevent the
negative expression of genes that can cause negative effects to living organisms.
2.2 Multiagent collaborative computation MCC is a new paradigm in MultiAgent System (MAS). It is the emulation of how human
beings work in collaborative manner in solving problems or finding solutions of given
www.intechopen.com

Obtaining Knowledge of Genes’ Behavior in Genetic Regulatory System by Utilizing Multiagent Collaborative Computation
477
problems or in achieving a common or joint goal or objective, by sharing resources they
have for the successfulness of their work. Working in collaborative manner does not need
leader. What it needs is a divider agent for dividing the work or task to be solved or given
into subworks or subtasks, and distributes them to some collaborative agents, and a fusion
agent that is tasked to fuse the results from collaborative agents to obtain a comprehensive
result or joint goal. By doing it, the subworks can be processed in parallel manner to
achieve the subgoals, and therefore it can save the processing time. Before we go deeper
into MCC, we start this section with the reintroduction of the concept of agent and the
concept of collaborative computation as well as its merit.
a. The Concept of Agent (Ahmad & Sumari, 2008)
There have been many literatures that study agent, but in this section we view an agent from a
comprehensive perspective. In real life, agent is defined as a thing that causes a significant
effect on a situation. In order to give this effect, agent must have capabilities. “Capability” in
this circumstance is the ability to manage when the tasks will be carried out, knows where to
move, knows how to do the tasks, knows the success level of the tasks being carried out, and
the consequences of the tasks being done. The essential thing that enables the agent in
performing its activities is the brain, a place where the information processing is carried out.
This is the most grandeur that is not possessed by other living things.
In accomplishing the assigned tasks, the agent always senses its surrounding environment
to get as much as information that can affect its activities. The gathered information is
processed in its brain, combining it with the existing information, making inferencing on the
fused information, performing information-inferencing fusion, and making the best decision
for actions to be done in anticipating the environment dynamics. The relation of an agent
with its surrounding environment as well as its information processing mechanism is
simply depicted in Fig. 1.
Fig. 1. The concept of agent along with its information-inferencing fusion capability
www.intechopen.com

Multi-Agent Systems - Modeling, Interactions, Simulations and Case Studies
478
In many literatures, agent is stated must have an intelligent characteristic. However, because
there is no uniform definition of what agent is, one common consensus is taken that the
autonomy or we call this as self-governing, as its the essential characteristic. Self-governing
means the agent has capability to instruct itself to accomplish the tasks and do self-evaluation
to value the success rate of the assigned tasks accomplishment for future enhancement.
b. The Concept of Collaborative Computation
Collaboration is taken from the Latin word “collaborare” meaning “to work together” , while
“collaborative” is an adjective form of “collaboration” . So, collaboration is defined as to
work with another or others on a joint project or in deeper definition is a process in which
Fig. 2. The concept of collaborative computation in a group of agents (Sumari & Ahmad, 2009)
www.intechopen.com

Obtaining Knowledge of Genes’ Behavior in Genetic Regulatory System by Utilizing Multiagent Collaborative Computation
479
entities share information, resources and responsibilities to jointly plan, implement, and
evaluate a program of activities to achieve a common goal (Camarinha-Matos &
Afsarmanesh, 2008).
In collaborative scheme, a group of entities enhance the capabilities of each other that
implies in sharing risks, resources, responsibilities, and reward. Collaboration involves
mutual engagement of participants to solve a problem together, which implies mutual trust
and thus takes time, effort, and dedication. On the other side, “computation” is defined as a
calculation involving numbers or quantities. By employing computational approach, we can
manipulate a large database to solve problems at hand very fast. The consequence is faster,
more complete, and more accurate results than that can be achieved by conventional
approach.
By combining the two definitions previously explained, we define “collaborative
computation” as a calculation on quantities done by a group of agent or multiagent that
works together to achieve common or joint goals (Ahmad, Sumari, & Zubir, 2009) as
depicted in Fig. 2. In an MCC scheme, each agent in the collaborative framework performs
its own tasks to achieve its own goals. The goals achieved by each agent actually are partial
parts of joint goal, which is the combination of partial goals. In simple word, the system is
given a problem along with the goal that has to be achieved. The problem is then divided
into several sub-problems that have to be solved by the agents. In achieving the sub-goals,
the agents perform computation in parallel. The achieved sub-goals are then combined to
become a single comprehensive goal that is called as joint goal (Sumari & Ahmad, 2009).
c. The Merits of Multiagent Collaborative Computation Approach (Sumari, 2010)
Fig. 3. The concept of MCC (Sumari, 2010)
www.intechopen.com

Multi-Agent Systems - Modeling, Interactions, Simulations and Case Studies
480
GRS is a very complex structure that regulates millions of genes in living organism’s body.
We believe that multiagent approach is suitable to model the genes’ interactions in GRS
with some strong reasons. MAS is aimed to cope with large-scale, realistic, and complex
problems that cannot be handled by single agent in order to find a solution of global
problems or to regulate or control complex systems. In MCC framework, the given task will
be divided into subtasks according to each agent specific task. By performing this, the
information processing can be done in simultaneous manner by all agents so that the
processing time can be reduced to minimum.
Assume that we have n agents in MCC framework. Given a task that a single agent can
process it in t time. If the task is divided into n subtasks and distributed them to n agents,
theoretically, the result of the process can be obtained in t/ n time with total t/ n +τ where τ is the time reserved for dividing the task and fusing or combining the subgoals into a joint
goal or the ultimate result. Therefore, by utilizing MCC the information-processing time can
be reduced from t to t/n+τ , or (t/n+τ) <t. This mechanism is illustrated in Fig. 3.
3. Knowledge-growing system and OMA3S information-inferencing fusion method
3.1 What is knowledge-growing? (Sumari et.al, 2010a) It is not easy to find any literature that defines or describes what the term “Knowledge-
Growing” is. The only research that used this term was for industrial application, that is,
examined how the knowledge growing old in human brain and used the analogy of it for
building a reconfiguration system for car application. It concentrated on the optimization of
knowledge retrieval rather than emulating the way of human brain grows the knowledge
over time, and used actuality measurement to measure the knowledge that is very often
used to solve an actual problem.
Up to the writing of this paper, there is no research that examines and develops an
intelligent method for an intelligent system that emulates the mechanism how the
human brain grows the knowledge from time to time. Our approach in developing KGS
was started from our observation to an intelligence characteristic displayed by human
brain in performing such matter by fusing information perceived by human sensory
organs and deliveres it to the brain. This approach is discussed in detail in (Ahmad &
Sumari, 2008). The original concept of information fusion, even though it also adopted
the mechanism occurs in living things’ brain, it is just defined how to fuse the
information for making estimation regarding a phenomenon, see (Hall & Llinas, 2001)
for the detail.
3.2 The concept of KGS Essentially, KGS is a system that is capable of growing its knowledge along with the
accretion of information it receives as the time passes (Ahmad & Sumari, 2009b). The
concept of KGS emerges from the observation of the mechanism occurs in human brain
when performing information-inferencing fusion to obtain new knowledge. In order to have
a more depth understanding on this mechanism, we developed a model of Human Inference
System (HIS) as the basis for our model of KGS as depicted in Fig. 4. The general formula to
obtain the number of inferencing is presented in (1).
www.intechopen.com

Obtaining Knowledge of Genes’ Behavior in Genetic Regulatory System by Utilizing Multiagent Collaborative Computation
481
( )2 1= − −δλ δ (1)
with λ is the number of inferencing from fused information and δ is the number of
information sources or sensors.
Fig. 4. A simplified illustration of human inference system (Sumari et.al, 2010b)
3.3 Knowledge growing mechanism As we can see in Fig. 4, the process in obtaining new knowledge from the gathered-and-
delivered information of a phenomenon observed by the sensory organs will have to get
through a five-step process, i.e. information fusion, information inferencing, information-
inferencing fusion, knowledge inferencing, and knowledge-inferencing fusion. Based on the
HIS model, we developed the mechanism that will be occurred in our model of KGS as
depicted in Fig. 5.
New knowledge in this scheme is called as information with Degree of Certainty (DoC)
whcih is introduced by (Sumari et.al, 2009b), that is, a value that determines the certainty of
the new knowledge regarding the observed phenomenon is considered accurate. Term “γ” is
www.intechopen.com

Multi-Agent Systems - Modeling, Interactions, Simulations and Case Studies
482
the representation of the time needed to obtain the new knowledge. The DoC is obtained by
applying A3S (Arwin-Adang-Aciek-Sembiring) method (Ahmad & Sumari, 2008).
Fig. 5. The mechanism of growing the knowledge in KGS as the representation of Fig. 4
(Sumari et.al, 2009a)
3.4 OMA3S information-inferencing fusion method To grow the knowledge, the requisites that have to be fulfilled are there has to be a
knowledge base and fusion mechanism. The fusion will be applied to the received
information with the existing or prior information/ knowledge. The knowledge is the result
of the combination between the new information and the existing one which is called as
after-processed information or posterior information. The mature technique for this
situation is Bayes Inference Method (BIM) (Hall, 1992), a special case of probability theory.
For performing the information-inferencing fusion, we have developed a method called A3S
information-inferencing fusion which is aimed to improve BIM for managing multi-
hypothesis multi-indication problems (Ahmad & Sumari, 2008). The A3S version which
involves the time parameter in the computation is called OMA3S (Sumari et.al, 2009c). The
detail how this method works is illustrated in Table I followed by its paired equations given
in (2) and (3).
www.intechopen.com

Obtaining Knowledge of Genes’ Behavior in Genetic Regulatory System by Utilizing Multiagent Collaborative Computation
483
( ) ( )11
==∑ j
ij iP
P
δ υψ δ (2)
( ) ( )1⎡ ⎤= ⎣ ⎦Y j
estimateP Pψ ψ (3)
with ( )1
jP ψ is New-Knowledge Probability Distribution (NKPD), ( )j
iP υ is information j
from sensor i, while 1= ,...,i δ is the number of sensor and 1= ,...,j λ is the number of fused
information. The ( )1
jP ψ and 1 ∈Ψjψ is the representation of “ fused information” of the
information delivered from multi-sensor. The word “estimated” means the selected fused
information is the most likely inferencing/ knowledge from all available
inferencing/ knowledge given information from multi-sensor. ( )estimate
P ψ is the largest
value of ( )1jP ψ that is called as DoC and [ ] [ ]
1==Y,...,
... max ...j m
. Term ( )1jP ψ defines NKPD at
1=γ .
Probability Distribution of Information from thi Sensor
and Probability Distribution of thj Fused Information Information
from -th
Sensor 1 2 3 … j … λ
1 ( )1iP υ ( )2
iP υ ( )31P υ … ( )1
jP υ … ( )1P λυ
… … … … … … … …
i 0 0 ( )3iP υ … ( )j
iP υ … ( )iP λυ
… … … … … … … …
δ 0 0 0 … 0 … ( )P λδυ
ψ (DoC) ( )11P ψ ( )2
1P ψ ( )31P ψ … ( )1
jP ψ … ( )1P λψ
Table 1. The illustration of the computation mechanism of A3S information-inferencing
method
Next observations on the same phenomenon will result in new NKPD at next time series
and these NKPD will form NKPD over Time (NKPDT) as presented in (4) and (5).
( ) ( )1
Γ
== Γ∑ j
j
P
P
γγφ
θ (4)
( ) ( )⎡ ⎤= ⎣ ⎦Y jestimateP Pθ θ (5)
with ( )j
tP θ is NKPDT, ( )j
tP ψ is information j observed at observation time γ , while
1= Γ,...,γ is the number of observation time and 1= ,...,j λ is the number of fused
information. The ( )jP θ and ∈Θjθ is the representation of “knowledge” of the information
delivered from multi-sensor at observation time γ . ( )estimate
P θ is the value of DoC of ( )jP θ
or the ultimate knowledge after a certain observation time.
www.intechopen.com
Multi-Agent Systems - Modeling, Interactions, Simulations and Case Studies
484
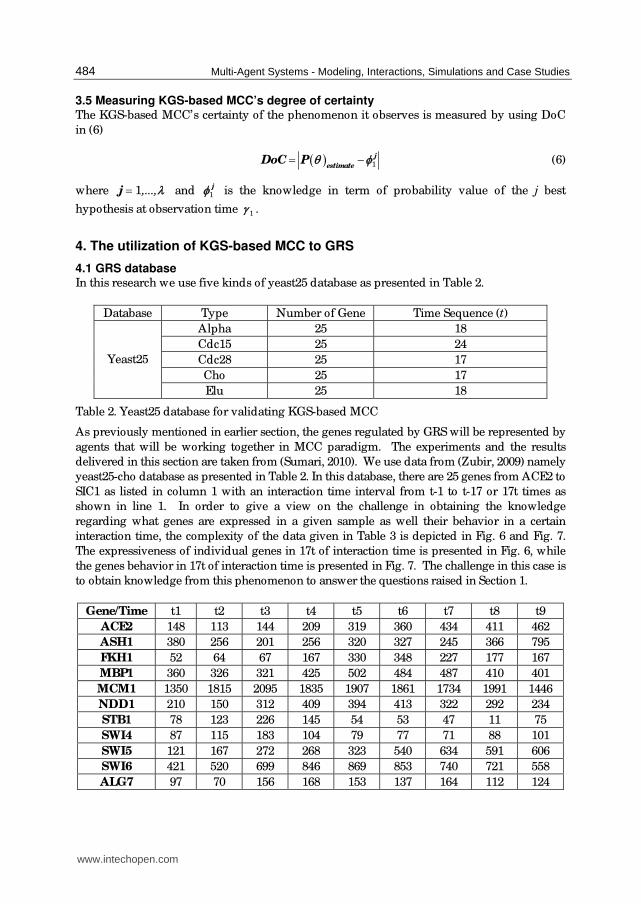
3.5 Measuring KGS-based MCC’s degree of certainty The KGS-based MCC’s certainty of the phenomenon it observes is measured by using DoC
in (6)
( ) 1= − j
estimateDoC P θ φ (6)
where 1= ,...,j λ and 1jφ is the knowledge in term of probability value of the j best
hypothesis at observation time 1γ .
4. The utilization of KGS-based MCC to GRS
4.1 GRS database In this research we use five kinds of yeast25 database as presented in Table 2.
Database Type Number of Gene Time Sequence (t)
Alpha 25 18
Cdc15 25 24
Cdc28 25 17
Cho 25 17
Yeast25
Elu 25 18
Table 2. Yeast25 database for validating KGS-based MCC
As previously mentioned in earlier section, the genes regulated by GRS will be represented by
agents that will be working together in MCC paradigm. The experiments and the results
delivered in this section are taken from (Sumari, 2010). We use data from (Zubir, 2009) namely
yeast25-cho database as presented in Table 2. In this database, there are 25 genes from ACE2 to
SIC1 as listed in column 1 with an interaction time interval from t-1 to t-17 or 17t times as
shown in line 1. In order to give a view on the challenge in obtaining the knowledge
regarding what genes are expressed in a given sample as well their behavior in a certain
interaction time, the complexity of the data given in Table 3 is depicted in Fig. 6 and Fig. 7.
The expressiveness of individual genes in 17t of interaction time is presented in Fig. 6, while
the genes behavior in 17t of interaction time is presented in Fig. 7. The challenge in this case is
to obtain knowledge from this phenomenon to answer the questions raised in Section 1.
Gene/Time t1 t2 t3 t4 t5 t6 t7 t8 t9
ACE2 148 113 144 209 319 360 434 411 462
ASH1 380 256 201 256 320 327 245 366 795
FKH1 52 64 67 167 330 348 227 177 167
MBP1 360 326 321 425 502 484 487 410 401
MCM1 1350 1815 2095 1835 1907 1861 1734 1991 1446
NDD1 210 150 312 409 394 413 322 292 234
STB1 78 123 226 145 54 53 47 11 75
SWI4 87 115 183 104 79 77 71 88 101
SWI5 121 167 272 268 323 540 634 591 606
SWI6 421 520 699 846 869 853 740 721 558
ALG7 97 70 156 168 153 137 164 112 124
www.intechopen.com

Obtaining Knowledge of Genes’ Behavior in Genetic Regulatory System by Utilizing Multiagent Collaborative Computation
485
CDC20 93 235 325 208 108 168 158 124 145
CDC21 17 59 106 93 57 37 18 18 19
CDC5 86 106 89 154 219 367 549 602 480
CDC6 554 471 967 930 936 876 809 831 864
CLB2 92 158 122 145 259 348 489 554 422
CLB5 562 785 1756 949 659 612 467 563 455
CLN1 149 1045 1344 1305 998 1013 717 571 323
CLN2 445 1620 2485 1303 916 808 738 636 303
CTS1 552 1080 447 258 287 466 435 299 217
EGT2 989 1244 732 786 1083 1284 816 678 1293
FAR1 235 263 160 165 303 468 429 880 903
HTA1 905 810 1490 1594 2037 999 1178 976 843
PCL2 153 510 620 260 224 235 157 130 238
SIC1 352 295 355 308 361 356 294 212 541
Table 3a. Genes’ names and their interaction values over time for yeast25-cho from t1 to t9
(continued to Table 3b)
Gene/Time t10 t11 t12 t13 t14 t15 t16 t17
ACE2 398 226 187 325 433 343 466 344
ASH1 1862 1180 640 544 388 327 517 959
FKH1 91 74 118 172 194 163 144 106
MBP1 277 341 364 507 467 484 473 382
MCM1 2227 1945 1334 1179 1830 1506 1517 1440
NDD1 198 215 319 365 333 246 250 238
STB1 120 140 129 98 66 45 75 44
SWI4 191 172 134 111 74 43 70 83
SWI5 540 463 357 449 937 743 1024 659
SWI6 651 758 641 741 887 885 744 692
ALG7 124 151 170 202 186 172 155 70
CDC20 160 172 166 175 111 113 112 112
CDC21 28 82 90 89 36 19 12 15
CDC5 238 219 202 324 326 435 496 471
CDC6 1149 902 689 859 799 832 707 921
CLB2 236 185 151 218 267 365 350 365
CLB5 1207 1325 643 647 657 509 464 508
CLN1 1152 1870 1388 989 1074 769 614 601
CLN2 791 1288 1624 1035 839 687 868 433
CTS1 1161 1840 1181 830 979 828 507 553
EGT2 4297 3430 3240 1598 1355 1044 2123 1813
FAR1 1794 1437 725 535 570 621 739 1194
HTA1 1934 1815 1998 1103 1888 2346 1708 1580
PCL2 428 659 409 284 276 178 203 211
SIC1 1286 813 595 490 398 400 389 692
Table 3b. Genes’ names and their interaction values over time for yeast25-cho from t10 to t17
www.intechopen.com

Multi-Agent Systems - Modeling, Interactions, Simulations and Case Studies
486
Fig. 6. The expressiveness of individual genes in 17t of interaction time (Sumari, 2010)
Fig. 7. The genes behavior in 17t of interaction time (Sumari, 2010)
4.2 The KGS-based MCC’s task and objective In this situation the task of KGS-based MCC is to carry out computation to obtain values of
genes behavior in a unity and individual genes expressiveness in an interval of interaction
www.intechopen.com

Obtaining Knowledge of Genes’ Behavior in Genetic Regulatory System by Utilizing Multiagent Collaborative Computation
487
time. Its objective is to obtain DoCs based on those obtained values to show genes behavior
in a comprehensive manner and to find out the most expressive genes, that is, the most
probable genes that give big influence to the product of their interaction. Therefore, for this
purpose we create a strategy as follows. • First, represent the genes into agents in multiagent system and construct the MCC framework for it. • Second, represent the genes’ interaction values into two-value state namely active and
inhibit, where an active gene will be assigned binary value ‘1’ and binary value ‘0’ if it is inhibited or not active. • Third, observe the genes’ interaction state in time-by-time manner and put arcs on the
genes which relate to each other as the representation of the existence of communication amongst agents. In this case only the active ones. Carry out this procedure until the last t in time series. During the interaction time, agents apply OMA3S method to obtain knowledge in collaborative manner. The result will be
system’s knowledge at certain interaction time t. • Fourth, obtain the inferencing of the KGS-based MCC behavior as the representation of genes behavior in biological GRS. This inferencing will become the ultimate knowledge
obtained by the system.
a. The Representation of Genes into MCC Structure
Fig. 8. The representation of genes of yeast25-cho by means agents in MCC structure
www.intechopen.com

Multi-Agent Systems - Modeling, Interactions, Simulations and Case Studies
488
We assume that the task divider agent is already done its task and produces Table 2. Refer
to Figure 3 in Section 2.2 we can simply convert the genes of yeas25-cho into agents in MCC
structure as follows. The first and the last genes in the list namely gene ACE2 and gene SIC1
are represented by agent i and agent n where i = 1,…,n and n = 25. The structure of the MCC
is depicted in Fig. 8.
b. The Representation of Genes’ Interaction Values into Two-Value State
The simplest means to represent the existence of the interaction among genes is by
representing them with value ‘1’ for ‘active’ interaction and ‘0’ for ‘inhibit‘ interaction as alsi
done by (Pasanen and Vihinen, 2005). This is what is called as Boolean representation of
genes interaction in GRS. We realize that each gene has its own highest and lowest value
that cannot be treated identically one to another. In order to minimize the chances of error in
collaborative computation process, we use the threshold-value equation as presented in (7).
1
1
1
0
=
=
⎧⎪⎪ <⎪= ⎨⎪⎪ ≥⎪⎩
∑∑
,
,
i
i i
i
i
i i
if
if
λτ
ττ λ
ττ
ψψ λφ
ψψ λ
(7)
with ∈Πiτφ is a binary-sequence which represents a set of interaction value at observation
time t, iτψ is the interaction value of agent j at observation time t, and τ is the number of
interaction sequence t when the observation is carried out. The parameter t in this case is
dimensionless. The application of (7) to the data given in Table 3 is presented in Table 4.
Gene/Time t1 t2 t3 t4 t5 t6 t7 t8 t9
ACE2 1 1 1 1 0 0 0 0 0
ASH1 1 1 1 1 1 1 1 1 0
FKH1 1 1 1 0 0 0 0 0 0
MBP1 1 1 1 0 0 0 0 1 1
MCM1 1 0 0 0 0 0 0 0 1
NDD1 1 1 0 0 0 0 0 0 1
STB1 1 0 0 0 1 1 1 1 1
SWI4 1 0 0 1 1 1 1 1 1
SWI5 1 1 1 1 1 0 0 0 0
SWI6 1 1 1 0 0 0 0 0 1
ALG7 1 1 0 0 0 1 0 1 1
CDC20 1 0 0 0 1 0 0 1 1
CDC21 1 0 0 0 0 1 1 1 1
CDC5 1 1 1 1 1 0 0 0 0
CDC6 1 1 0 0 0 0 1 0 0
CLB2 1 1 1 1 1 0 0 0 0
www.intechopen.com

Obtaining Knowledge of Genes’ Behavior in Genetic Regulatory System by Utilizing Multiagent Collaborative Computation
489
CLB5 1 0 0 0 1 1 1 1 1
CLN1 1 0 0 0 0 0 1 1 1
CLN2 1 0 0 0 1 1 1 1 1
CTS1 1 0 1 1 1 1 1 1 1
EGT2 1 1 1 1 1 1 1 1 1
FAR1 1 1 1 1 1 1 1 0 0
HTA1 1 1 0 0 0 1 1 1 1
PCL2 1 0 0 1 1 1 1 1 1
SIC1 1 1 1 1 1 1 1 1 0
Table 4a. The conversion results of genes interaction values from Table 2a (continued to
Table 4b)
Gene/Time t10 t11 t12 t13 t14 t15 t16 t17
ACE2 0 1 1 0 0 0 0 0
ASH1 0 0 0 1 1 1 1 0
FKH1 1 1 1 0 0 0 1 1
MBP1 1 1 1 0 0 0 0 1
MCM1 0 0 1 1 0 1 1 1
NDD1 1 1 0 0 0 1 1 1
STB1 0 0 0 0 1 1 1 1
SWI4 0 0 0 0 1 1 1 1
SWI5 0 1 1 1 0 0 0 0
SWI6 1 0 1 0 0 0 0 1
ALG7 1 0 0 0 0 0 0 1
CDC20 0 0 0 0 1 1 1 1
CDC21 1 0 0 0 1 1 1 1
CDC5 1 1 1 0 0 0 0 0
CDC6 0 0 1 0 1 0 1 0
CLB2 1 1 1 1 1 0 0 0
CLB5 0 0 1 1 1 1 1 1
CLN1 0 0 0 0 0 1 1 1
CLN2 1 0 0 0 1 1 1 1
CTS1 0 0 0 0 0 0 1 1
EGT2 0 0 0 1 1 1 0 0
FAR1 0 0 0 1 1 1 0 0
HTA1 0 0 0 1 0 0 0 0
PCL2 0 0 0 1 1 1 1 1
SIC1 0 0 0 0 1 1 1 0
Table 4b. The conversion results of genes interaction values from Table 2b
www.intechopen.com

Multi-Agent Systems - Modeling, Interactions, Simulations and Case Studies
490
c. The Observation to Agents Interaction and Obtaining Knowledge from It
Some influence graphs will be presented to show the interaction amongst KGS-based MMC
agents in GRS, and knowledge that is acquired by all agents collaboratively at 1t , 6t and
after 6t , at 17t and after 17t . The expressiveness of single agents and their behaviour at a
certain time and at a certain time interval such as from 1t to 6t are depicted in Fig. 9 to Fig.
15, while for all 17t of interaction time is presented in Fig. 16.
Fig. 9. Influence graph of KGS-based MCC behaviour at 1t . Yellow colour represents the
active agents during the interaction at that time
Fig. 10. Knowledge acquired by agents at 1t .
www.intechopen.com

Obtaining Knowledge of Genes’ Behavior in Genetic Regulatory System by Utilizing Multiagent Collaborative Computation
491
Fig. 11. Influence graph of KGS-based MCC behaviour at 6t
Fig. 12. Knowledge acquired by agents at 6t
www.intechopen.com

Multi-Agent Systems - Modeling, Interactions, Simulations and Case Studies
492
Fig. 13. Knowledge acquired by agents after 6t of interaction time
Fig. 14. Influence graph of KGS-based MCC behaviour at 17t
www.intechopen.com

Obtaining Knowledge of Genes’ Behavior in Genetic Regulatory System by Utilizing Multiagent Collaborative Computation
493
Fig. 15. Knowledge acquired by agents at 17t
Fig. 16. Knowledge acquired by agents after 17t of interaction time
d. Knowledge Obtained by KGS-based MCC
The computation results in form of the values of DoCs that are produced by KGS-based
MCC’s fusion agent which are compared with the number of communication paths formed
www.intechopen.com

Multi-Agent Systems - Modeling, Interactions, Simulations and Case Studies
494
during agents interaction is presented in Fig. 17 and Fig. 18. These DoCs become the
ultimate knowledge of the system.
Fig. 17a. The ultimate knowledge acquired by the system regarding individual agents
expressiveness after 17t of interaction time. The DoCs of the system’s knowledge are
compared with the communication paths formed amongst agents
Fig. 17b. 3D line graphic representation of system’s knowledge regarding individual agents
expressiveness after 17t of interaction time
www.intechopen.com

Obtaining Knowledge of Genes’ Behavior in Genetic Regulatory System by Utilizing Multiagent Collaborative Computation
495
Fig. 18a. The ultimate knowledge acquired by the system regarding all agents behavior
during 17t of interaction time
Fig. 18b. 3D line graphic representation of the system’s knowledge regarding all agents
behavior during 17t of interaction time
www.intechopen.com

Multi-Agent Systems - Modeling, Interactions, Simulations and Case Studies
496
After observing Fig. 17 and Fig. 18, we can have knowledge regarding KGS-based MCC
agents’ behaviour as follows.
1. Viewed from individual agents expressiveness we can obtain knowledge that gene
ASH1 exhibit a dominant role even though there are genes CLB5, EGT2, and PCL2 that
also show their expressiveness with DoC = 0.053. The certainty that gene ASH1 is the
most expressive gene amongst other expressive genes is shown by the difference
between DoC and the number of weighted arcs that is very minimum, that is, 0.01%.
Fig. 17 is the comprehensive inferencing of the information given in Fig. 6.
2. The time where the highest interaction is achieved is at 1t or 1=hight t , when 100% of
yeast25-cho agents involve in the interaction with DoC = 0.116. On the other hand, the
time where the lowest interaction is achieved is at 11t or 11=lowt t with DoC = 0.035.
Fig. 18 is the comprehensive inferencing of the information given in Fig. 7.
4.2 Estimations based on the knowledge obtained by KGS-based MCC Based on the knowledge obtained by KGS-based MCC regarding the phenomena displayed
by all agents, we can make estimations as follow.
a. The most probable gene that will be playing the important role in the interaction time
between t18 to t24 , with the assumption that the interaction cycle will restart every 17t
times, is gene ASH1. This phenomenon is in line with the information presented in
(http:/ / www.yeastgenome.org/ ) regarding the role of that gene as an inhibitor in
transcription process.
b. Estimation of hight t= 18 and estimation of lowt t= 28
5. Measuring the accurateness of KGS-based MCC results
Validating the results is of importance matter to ensure that the new paradigm we deliver in
this paper is valid. For this purpose we have developed some parameters to compare DoC
values with the number of arcs which is the representation of the existence of
communication paths amongst agents in the influence graphs depicted in previous section.
These parameters are:
a. The number of arcs, ξ and weighted arc, Ξ . Arcs are the arcs that connect the active
agents in each interaction time and are observed by the help of influence graphs.
Weighted arc is normalized value of arc in each interaction time, t or for each gene, g by
the total number of arcs formed in each interaction time, t.
[ ][ ]
1=
Ξ =∑ni
i
i
ξξ
(7)
with 1= ,...,i n and n is the number of genes or one cell cycle, as example 17t.
b. ΔDKJ, Δ% DK , and Δ% _DKJ total . The absolute value of the difference between DoC
and the number of arcs formed at each interaction time, t or for each gene, g. Δ% DK is
the percentage of ΔDKJ while Δ% _DKJ total is the total number of Δ% DK .
www.intechopen.com

Obtaining Knowledge of Genes’ Behavior in Genetic Regulatory System by Utilizing Multiagent Collaborative Computation
497
[ ] [ ] [ ]Δ = −DKJ i DoC i iξ (8)
[ ] 100Δ = Δ ×% %DKJ DKJ i (9)
1=
Δ = Δ∑% _ %n
i
DKJ total DKJ (10)
with 1= ,...,i n and n is the number of genes or one cell cycle, as example 17t.
c. Behavior match, χ , the total number of match, Χ , and percentage of the behavior
match, Χ% . Parameter that shows the difference of genes behaviour is viewed from
DoC and Ξ with an assumption that the arrangement of genes as given in Table 2 is not
changed. Behaviour matching comparison is done by observing the graphic dynamic
from gene thi to gene thn .
[ ] [ ] [ ][ ] [ ]
1
0
= Ξ⎧⎪= ⎨⎪ ≠ Ξ⎩
,
,
if DoC i i
i
if DoC i i
χ (11)
[ ]1
1=Χ =∑n
i
iχ (12)
[ ]1
1==∑%
n
i
i
Xn
χ (13)
with 1= ,...,i n and n is the number of genes or one cell cycle, as example 17t. [ ]1
iχ is
match gene behaviour otherwise it will be [ ]0
iχ , and %X is the percentage of
behaviour match.
d. Erroneous of behavior match, ε . The percentage of the comparison between the total
number of match of gene behavior, Χ , with the total number of absolute erroneous,
Δ% _DKJ total .
Δ= % _DKJ total
Xε (13)
In this case even though 100=% %X , ε does not always have value of 0% because of
the influence of [ ]ΔDKJ i factor.
On the next tables we will see how these parameters are used to measure the accurateness of
the application of KGS-based MCC to obtain the knowledge regarding the GRS behaviour.
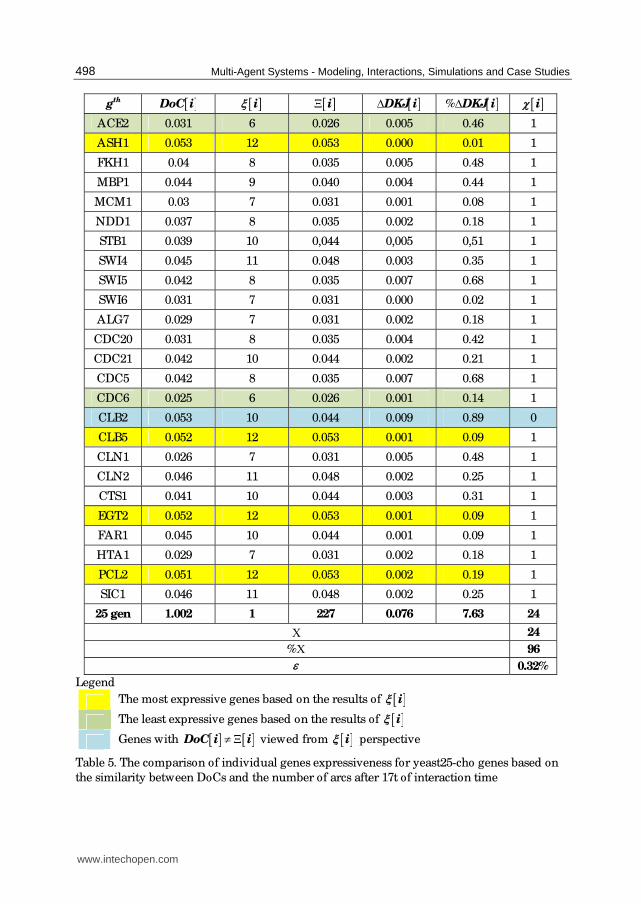
Table 5 contains the system’s knowledge taken from Fig. 17 while Table 6 contains the
system’s knowledge taken from Fig. 18.
www.intechopen.com
Multi-Agent Systems - Modeling, Interactions, Simulations and Case Studies
498
thg [ ]DoC i [ ]iξ [ ]Ξ i [ ]ΔDKJ i [ ]Δ% DKJ i [ ]iχ
ACE2 0.031 6 0.026 0.005 0.46 1
ASH1 0.053 12 0.053 0.000 0.01 1
FKH1 0.04 8 0.035 0.005 0.48 1
MBP1 0.044 9 0.040 0.004 0.44 1
MCM1 0.03 7 0.031 0.001 0.08 1
NDD1 0.037 8 0.035 0.002 0.18 1
STB1 0.039 10 0,044 0,005 0,51 1
SWI4 0.045 11 0.048 0.003 0.35 1
SWI5 0.042 8 0.035 0.007 0.68 1
SWI6 0.031 7 0.031 0.000 0.02 1
ALG7 0.029 7 0.031 0.002 0.18 1
CDC20 0.031 8 0.035 0.004 0.42 1
CDC21 0.042 10 0.044 0.002 0.21 1
CDC5 0.042 8 0.035 0.007 0.68 1
CDC6 0.025 6 0.026 0.001 0.14 1
CLB2 0.053 10 0.044 0.009 0.89 0
CLB5 0.052 12 0.053 0.001 0.09 1
CLN1 0.026 7 0.031 0.005 0.48 1
CLN2 0.046 11 0.048 0.002 0.25 1
CTS1 0.041 10 0.044 0.003 0.31 1
EGT2 0.052 12 0.053 0.001 0.09 1
FAR1 0.045 10 0.044 0.001 0.09 1
HTA1 0.029 7 0.031 0.002 0.18 1
PCL2 0.051 12 0.053 0.002 0.19 1
SIC1 0.046 11 0.048 0.002 0.25 1
25 gen 1.002 1 227 0.076 7.63 24
Χ 24
Χ% 96
ε 0.32%
Legend
The most expressive genes based on the results of [ ]iξ
The least expressive genes based on the results of [ ]iξ
Genes with [ ] [ ]≠ ΞDoC i i viewed from [ ]iξ perspective
Table 5. The comparison of individual genes expressiveness for yeast25-cho genes based on
the similarity between DoCs and the number of arcs after 17t of interaction time
www.intechopen.com

Obtaining Knowledge of Genes’ Behavior in Genetic Regulatory System by Utilizing Multiagent Collaborative Computation
499
tht [ ]DoC i [ ]iξ [ ]Ξ i [ ]ΔDKJ i [ ]Δ% DKJ i [ ]iχ
1 0.116 25 0.110 0.006 0.59 1
2 0.073 15 0.066 0.007 0.69 1
3 0.054 12 0.053 0.001 0.11 1
4 0.046 11 0.048 0.002 0.25 1
5 0.055 14 0.062 0.007 0.67 1
6 0.052 13 0.057 0.005 0.53 1
7 0.058 14 0.062 0.004 0.37 1
8 0.063 15 0.066 0.003 0.31 1
9 0.072 16 0.070 0.002 0.15 1
10 0.043 9 0.040 0.003 0.34 1
11 0.035 7 0.031 0.004 0.42 1
12 0.052 10 0.044 0.008 0.79 1
13 0.038 9 0.040 0.002 0.16 1
14 0.052 13 0.057 0.005 0.53 1
15 0.058 14 0.062 0.004 0.37 1
16 0.066 15 0.066 0.000 0.01 1
17 0.068 15 0.066 0.002 0.19 1
17t 1.001 227 1 0.06 6.46 17
Χ 17
Χ% 100
ε 0.38
Legend
hight
lowt
Table 6. The behaviour comparison for all yeast25-cho genes based on the similarity
between DoCs and the number of arcs after 17t of interaction time
From the comparison results presented in Table 4 and Table 5, we can conclude as follows.
3. Viewed from the individual genes expressiveness in interaction in 17t times, the
accurateness of system’s result is 24/25 * 100% = 96%, with the erroneous of behaviour
match as much as 0.32%.
4. Viewed from the behaviour of all genes in 17t times of interaction time, the accurateness
of system’s result is 17/17 * 100% = 100%, with the erroneous of behaviour match as
much as 0.38%.
6. The results of the application of KGS-based MCC to other types of yeast25
With the same manner, we apply KGS-based MCC to the other types of yeast25 and the
results are presented in Table 7 for individual gene expressiveness and Table 8 for all genes
behaviour.
www.intechopen.com

Multi-Agent Systems - Modeling, Interactions, Simulations and Case Studies
500
Type Accurateness The Most Expressive Genes Time Interval
Alpha 88% MBP1, CDC5, FAR1 18t
Cdc15 72% ASH1, STB1, CLN2, PCL2 24t
Cdc28 92% CLB5, EGT2 18t
Cho 96% ASH1 17t
Elu 92% SWI6, SIC1 18t
Average 88%
Table 7. The accurateness of the application KGS-based MCC to yeast25 database for
obtaining knowledge regarding the most expressive genes
Interaction Time Type Accurateness
hight lowt
Alpha 100% 5t , 6t 1t
Cdc15 100% 9t , 22t 6t
Cdc28 100% 5t 15t
Cho 100% 1t 11t
Elu 94.4% 6t 13t
Average 98.8%
Table 8. The accurateness of the application KGS-based MCC to yeast25 database for
obtaining knowledge regarding al genes behaviour
Based on the information delivered in the two tables above, we can conclude the
accurateness of KGS-based MCC in obtaining knowledge regarding GRS behaviour as
follows.
1. The average accurateness of the knowledge regarding the most expressive genes
reaches 88%.
2. The averaged accurateness of the knowledge regarding the behaviour of all genes
reaches 98.8%.
7. Conclusion
GRS is a unique system within all living things which regulates the “core“ of living cells
called gene, that is, a sequence of DNA. The regulation performed by GRS to the genes
displays a interesting phenomena that if we can obtain knowledge about them we can use it
to refine the products of the cells in the future. Harmonious with it, in this paper we have
presented in concise manner the process in obtaining knowledge regarding GRS behaviour
by applying KGS-based MCC paradigm on several types of yeast25 database. The core of
KGS-based MCC paradigm is OMA3S information-inferencing fusion method that is
developed primarily for KGS, a new perspective in Artificial Intelligence (Sumari, 2010).
From the strategy as well as the research results we have presented in this paper we can
conclude that the representation of GRS by means of KGS-based MCC paradigm is a very
good approach and very advantegous for obtaining knowledge regarding the behavior of
genes in it. The knowldege includes the most expressive genes and all genes behaviour in a
www.intechopen.com

Obtaining Knowledge of Genes’ Behavior in Genetic Regulatory System by Utilizing Multiagent Collaborative Computation
501
single cell cycle, that is, a certain interval of interaction time. One example, that is yeast25-
cho, has already been given and the accurateness of the knowledge acquired by the system
is 96% and 100% for having a knowledge of the most expressive genes and all genes
behaviour subsequently. By applying the same technique to other types of yeast25, we
found that in average the knowledge accurateness of the knowledge acquired by the system
is 88% and 98.8% for having a knowledge of the most expressive genes and all genes
behaviour subsequently. These results show that KGS-based MCC paradigm is one of
appropriate means for obtaining knowledge regarding GRS behaviour.
One of our further works will be applying KGS-based MCC paradigm on a larger number of
genes from the same database. We have been conducting a research on this matter and in
the same time perfecting our method so it can be applied to diverse problems.
8. References
Ahmad, A.S. & Sumari, A.D.W. (2008). Multi-Agent Information Inferencing Fusion in
Integrated Information System, Institut Teknologi Bandung Publisher, ISBN 978-979-
1344-31-9, Bandung.
Ahmad, A.S. & Sumari, A.D.W. (2009a). The modeling of genes’ interactions by means of
multiagent collaborative computation, Proceedings of International Conference on
Instrumentation, Communication, and Information Technology and Biomedical
Engineering 2009 (ICICI-BME2009), Plenary Speech Paper, pp. 6-11, ISBN 978-979-
1344-67-8, IEEE CFP0987H-CDR, Institut Teknologi Bandung, November 2009,
Institut Teknologi Bandung, Bandung.
A Ahmad, A.S. & Sumari, A.D.W. (2009b), A novel perspective on Artificial Intelligence:
information-inferencing fusion for knowledge growing, The 2nd International
Conference on Electrical Engineering and Informatics 2009 (ICEEI2009), Keynote Speech
Paper, Universiti Kebangsaan Malaysia, August 2009, Universiti Kebangsaan
Malaysia, Kuala Lumpur.
Ahmad, A.S.; Sumari, A.D.W. & Zubir, H.Y. (2009) Collaborative computation in
bioinformatics for better life, Proceedings of National Seminar on Information
Technologi and Its Applications 2009, Keynote Speech Paper, ISBN 977-208-5234-00-7,
Malang State Politechnic, March 2009, Malang State Politechnic, Malang.
Camarinha-Matos, L. M. & Afsarmanesh, H. (eds) (2008). Collaborative Network: Reference
Modeling, Springer, ISBN 978-0387794259, New York.
Dill, K.; Grodzinski, P. & Liu, R.H. (eds) (2009). Microarrays: Preparation, Microfluidics,
Detection Methods, and Biological Applications, Springer, ISBN 978-0387727165, New
York.
Emmert-Streib, F. & Dehmer, M. (eds) (2008). Analysis of Microarray Data: A Network-Based
Approach, Wiley-VCH, ISBN 978-3527318223, Weinheim.
Ewens, W. & Grant, G. (2005). Statisical Methods in Bioinformatics: An Introduction, 2nd Ed,
Springer, ISBN 0-387-40082-6, New York.
Hall, D.L. (1992). Mathematical Techniques in Multisensor Data Fusion, Artech House, ISBN 0-
890065586, London.
Hall, D.L. & Llinas, J.L. (2001). Handbook of Multisensor Data Fusion, CRC Press, ISBN 978-
0849323799, New York.
www.intechopen.com

Multi-Agent Systems - Modeling, Interactions, Simulations and Case Studies
502
Pasanen, T. dan Vihinen, M. (2005). Gene regulatory networks, In: DNA Microarray Data
Analysis, Tuimala, J. & Laine, M.M. (Ed.), pp. 135-142, CSC-Scientific Computing
Ltd., ISBN 952-5520129, Helsinki.
Reece, R.J. (2004). Analysis of Genes and Genomes, John Wiley & Sons, ISBN 978-0470843802,
Chichester.
Sumari, A.D.W. & Ahmad, A.S. (2009). Multiagent collaborative computation paradigm for
decision-making support system, Proceedings of International Industrial Informatics
Seminar 2009 (IIIS2009), pp. 17-22, ISSN 2085-4854, Sunan Kalijaga Islamic State
University, August 2009, Sunan Kalijaga Islamic State University, Yogyakarta.
Sumari, A.D.W.; Ahmad, A.S.; Wuryandari, I. & Sembiring, J. (2009a). A mathematical
model of knowledge-growing system: a novel perspective In Artificial Intelligence,
Proceedings of IndoMS International Conference on Mathematics and Its Applications
2009 (IICMA2009), pp. 229-240, ISBN 978-6029642605, Gadjah Mada University,
October 2009, Gadjah Mada University, Yogyakarta.
Sumari, A.D.W.; Ahmad, A.S.; Wuryandari, I. & Sembiring, J. (2009b), Multiagent-based
information fusion system in network-centric warfare paradigm, Journal of
Computer Technology “COMPILE” , Vol.2, No. 1 (January 2009) pp. 39-55, ISSN 1978-
4678.
Sumari, A.D.W.; Ahmad, A.S.; Wuryandari, I. & Sembiring, J. (2009c), The application of
knowledge-growing system to multiagent collaborative computation for inferring
the behavior of genes interaction, International Journal of Computer Science & Network
Security (IJCSNS), Vol. 9, No. 11 (November 2009) pp. 82-92, ISSN 1738-7906.
Sumari, A.D.W. (2010). Knowledge-Growing System: a novel perspective in Artificial
Intelligence, Doctor (Dr.) Dissertation, Institut Teknologi Bandung, July 2010, Institut
Teknologi Bandung, Bandung.
Sumari, A.D.W.; Ahmad, A.S.; Wuryandari, I. & Sembiring, J. (2010a). Knowledge sharing in
knowledge-growing-based systems, Proceedings of the First International Conference
on Green Computing 2010 and the Second AUN/SEED-Net Regional Conference on ICT
(ICGC-RCICT2010), Gadjah Mada University, pp. 329-333, ISSN 2086-4868, March
2010, Gadjah Mada University, Yogyakarta.
Sumari, A.D.W.; Ahmad, A.S.; Wuryandari, I. & Sembiring, J. (2010b), Constructing brain-
inspired knowledge-growing system: a review and a design concept, The Second
International Conference on Distributed Framework and Applications 2010 (DFmA2010),
Gadjah Mada University, pp. 95-102, ISBN 978-602974704, August 2010, Gadjah
Mada University, Yogyakarta.
Zubir, H.Y. (2008). The modeling of genetic regulatory system using knowledge growing
basis, Doctor (Dr.) Dissertation, Institut Teknologi Bandung, December 2009, Institut
Teknologi Bandung, Bandung.
Willett, E. (2006). Genetic Demystified, McGraw-Hill, ISBN 978-0071459303, New York.
www.intechopen.com
Multi-Agent Systems - Modeling, Interactions, Simulations andCase StudiesEdited by Dr. Faisal Alkhateeb
ISBN 978-953-307-176-3Hard cover, 502 pagesPublisher InTechPublished online 01, April, 2011Published in print edition April, 2011
InTech EuropeUniversity Campus STeP Ri Slavka Krautzeka 83/A 51000 Rijeka, Croatia Phone: +385 (51) 770 447 Fax: +385 (51) 686 166www.intechopen.com
InTech ChinaUnit 405, Office Block, Hotel Equatorial Shanghai No.65, Yan An Road (West), Shanghai, 200040, China
Phone: +86-21-62489820 Fax: +86-21-62489821
A multi-agent system (MAS) is a system composed of multiple interacting intelligent agents. Multi-agentsystems can be used to solve problems which are difficult or impossible for an individual agent or monolithicsystem to solve. Agent systems are open and extensible systems that allow for the deployment of autonomousand proactive software components. Multi-agent systems have been brought up and used in severalapplication domains.
How to referenceIn order to correctly reference this scholarly work, feel free to copy and paste the following:
Adang Suwandi Ahmad and Arwin Datumaya Wahyudi Sumari (2011). Obtaining Knowledge of Genes’Behavior in Genetic Regulatory System by Utilizing Multiagent Collaborative Computation, Multi-Agent Systems- Modeling, Interactions, Simulations and Case Studies, Dr. Faisal Alkhateeb (Ed.), ISBN: 978-953-307-176-3,InTech, Available from: http://www.intechopen.com/books/multi-agent-systems-modeling-interactions-simulations-and-case-studies/obtaining-knowledge-of-genes-behavior-in-genetic-regulatory-system-by-utilizing-multiagent-collabora

© 2011 The Author(s). Licensee IntechOpen. This chapter is distributedunder the terms of the Creative Commons Attribution-NonCommercial-ShareAlike-3.0 License, which permits use, distribution and reproduction fornon-commercial purposes, provided the original is properly cited andderivative works building on this content are distributed under the samelicense.