on fractional pid controllers a frequency domain approach
DESCRIPTION
On Fractional PID Controllers a Frequency Domain ApproachTRANSCRIPT

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
On Fractional PID Controllers:A Frequency Domain Approach
Blas M. VinagreEscuela de Ingenierías Industriales, UEX, Badajoz, Spain
I. Podlubny, L. DorcakBERG Faculty, Technical University of Kosice, Kosice, Slovak Rep.
V. FeliuE. T. S. Ingenieros Industriales, UCLM, Ciudad Real, Spain
IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
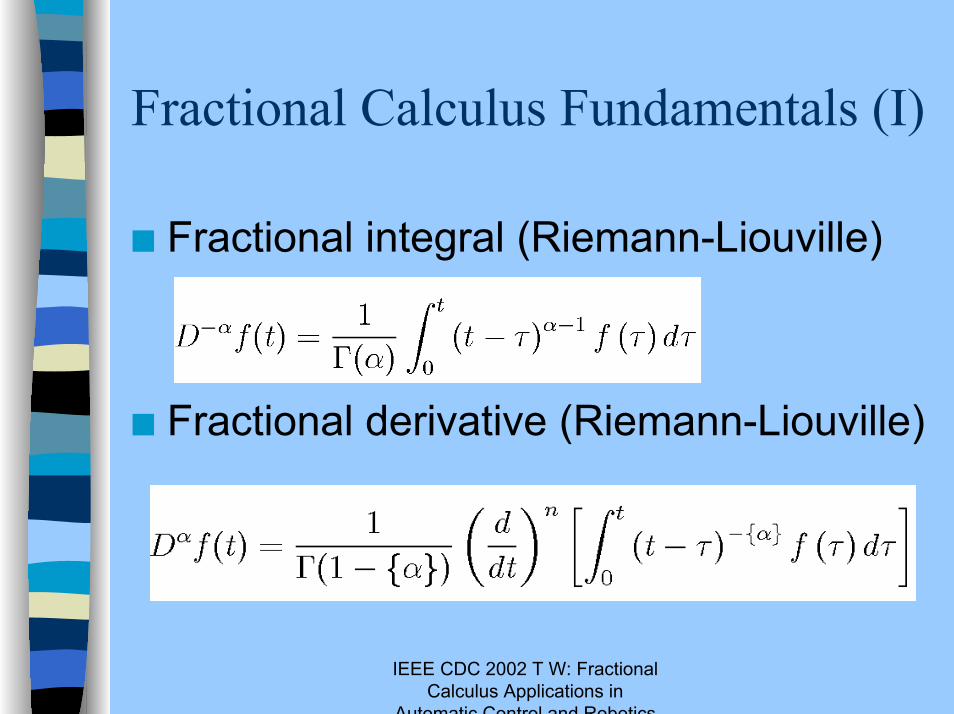
Fractional Calculus Fundamentals (I)
■ Fractional integral (Riemann-Liouville)
■ Fractional derivative (Riemann-Liouville)

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Fractional Calculus Fundamentals (II)
■ Fractional Derivative (Gründwald-Letnikov)
■ Laplace Transforms

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Classical PID
■ Equations

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Classical PID
■ Frequency response

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Fractional PID
■ Equations

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Fractional PID
■ Frequency response

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Fractional PID
■ Fractional ID controller

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Fractional PID
■ PID plane

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Illustrative examples
■ Example 1– Real system transfer function
– Approximated transfer function

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Illustrative examples
■ Example 1– Fractional PD controller

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Illustrative examples
■ Example 1– PD controller

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Example 1■ Step responses

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Illustrative examples
■ Example 2: DC Motor– Transfer function:
– Specifications: Phase Margin=60º, independent of the payload changes.

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Example 2
■ Fractional controller

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Example 2■ Step response

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Ideas for further work
■ On tuning– Generalize some methods for using the
new possibilities■ On realizations:
– The problem of memory

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
On realizations
■ Analog realizations– Partial fractions expansions, continued
fractions expansions, etc.– Rational function interpolation– Fitting or identification
■ Analog circuit

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Digital realizations
■ The “short memory” principle

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Digital realizations
■ The “short memory” principle
IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
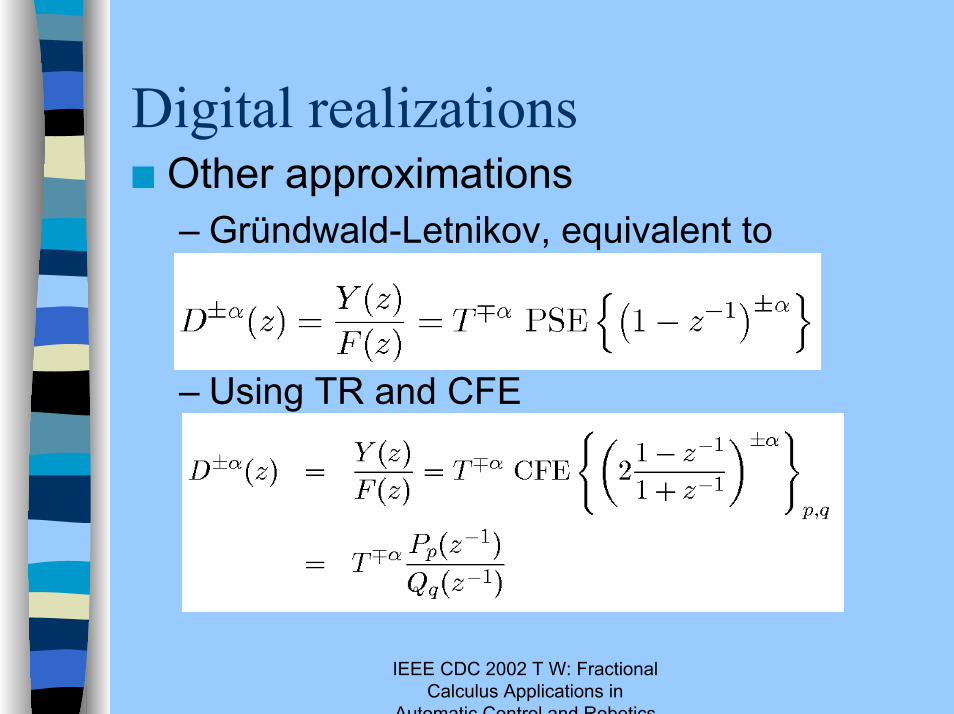
Digital realizations■ Other approximations
– Gründwald-Letnikov, equivalent to
– Using TR and CFE

IEEE CDC 2002 T W: Fractional Calculus Applications in
Automatic Control and Robotics
Conclusions
■ Advantages of fractional PID– Better for fractional systems– Similar simplicity and compactness– More general structure: added flexibility
■ Problems– Realizations
■ Work in progress– Lab prototypes of fractional operators, analog and
digital, working fine.