operation manual for - gmw associates - distributor and ... · figure 10 theodolite mounted probe...
TRANSCRIPT

www.bartington.com
Bartington Instruments Limited
5 & 10 Thorney Leys Business Park
Witney, Oxford, OX28 4GE, England.
T: +44 (0)1993 706565
F: +44 (0)1993 774813
Operation Manual forMag-01H Fluxgate Declinometer/Inclinometer
with non-magnetic WILD T1 Theodolite
OM2020
Specifications may be subject to slight alteration without prior notice. This system is not qualified for use in explosive atmospheres or life support systems. Consult Bartington Instruments for advice.
The copyright of this document is the property of Bartington Instruments Ltd. The document is supplied on the condition that it is to be treated commercially confidential and it may not therefore be disclosed to any third party without written authorisation of the Managing Directors of Bartington instruments
(89/336/EEC)EMC DIRECTIVE
Distributed By: GMW Associates955 Industrial Road, San Carlos, CA, 94070 USAPHONE: +1 650-802-8292 FAX: +1 650-802-8298EMAIL: [email protected] WEB: www.gmw.com

OM2020 ISSUE 4 PAGE 2 OF 27
LIST OF CONTENTS
1.0 INTRODUCTION1.1. THE NULL METHOD OF MEASUREMENT1.2. RESOLUTION
2.0 THE MAGNETOMETER 2.1. FRONT PANEL CONTROLS AND THEIR FUNCTIONS 2.2. REAR PANEL CONTROLS AND THEIR FUNCTIONS 2.3. THE MAGNETOMETER PROBE
2.4. ELECTROMAGNETIC COMPATIBILITY
3.0 THE THEODOLITE 3.1. NIGHT VIEWING
3.2. STEEP SIGHTING PRISMS3.3. OBJECTIVE SUN AND ORANGE FILTERS
4.0 TAKING MEASUREMENTS 4.1. MAGNETIC HYGIENE
4.2. THEODOLITE SET-UP4.3 PERFORMING OBSERVATIONS OF D AND I WITH A NON RESETTABLE
HORIZONTAL CIRCLE THEODOLITE4.4 PERFORMING OBSERVATION OF DECLINATION4.5. PERFORMING OBSERVATION OF INCLINATION4.6. OBSERVATORY RECORD SHEET
5.0 REPAIR AND MAINTENANCE 5.1. CHECKING THE SYSTEM 5.1.1. BATTERY CHECK 5.1.2. FUNCTIONAL CHECK 5.1.3. THEODOLITE OPTICAL CHECK 5.1.4. RECALIBRATION
5.2. PROBE ALIGNMENT 5.3. OFFSET TRIMMING 5.4. PROBE CABLE REPAIRS 5.5. FITTING THE MAGNETOMETER PROBE ASSEMBLY 5.6. Mag-01H BATTERY REPLACEMENT
6.0 TECHNICAL SPECIFICATIONS 6.1. Mag-01H ELECTRONICS UNIT 6.2. THEODOLITE MOUNTED Mag A PROBE 6.3. CONNECTING CABLE
6.4. THEODOLITE
7.0 WILD T1 THEODOLITE MANUAL EXTRACTS

OM2020 ISSUE 4 PAGE 3 OF 27
LIST OF DIAGRAMS FIGURE 1 THE INTERNATIONAL GENERAL REFERENCE FIELD FIGURE 2 Mag-01H SYSTEM SCHEMATIC FIGURE 3 Mag-01H FRONT PANEL FUNCTIONS FIGURE 4 Mag-01/Mag-01H REAR PANEL FUNCTIONS FIGURE 5 PLAN VIEW OF OBSERVATION POSITIONS FOR D AND I FIGURE 6 OBSERVATIONS OF DECLINATION IN THE HORIZONTAL CIRCLE FIGURE 7 OBSERVATIONS OF INCLINATION IN THE VERTICAL CIRCLE FIGURE 8 THEODOLITE - KEY OPERATIONAL FEATURES - VIEW 1
FIGURE 9 THEODOLITE - KEY OPERATIONAL FEATURES - VIEW 2 FIGURE 10 THEODOLITE MOUNTED PROBE TYPE ‘A’ ASSEMBLY FIGURE 11 PROBE TYPE ‘A’ - INTERNAL VIEW FOR CABLE REPLACEMENT FIGURE 12 MAGNETOMETER - THE INTERNAL VIEW OF BATTERY AND ADJUSTMENT COMPONENTS FIGURE 13 Mag-01H PROBE TYPE ‘A’ - CABLE AND CONNECTORS

OM2020 ISSUE 4 PAGE 4 OF 27
1.0 INTRODUCTION This manual describes the use and routine maintenance of the Bartington Observatory Declination and Inclination theodolite magnetometer. For further details of the Wild theodolite, consult the attached manual in section 7.0. The system permits very precise angular measurements of the terrestrial magnetic field F. The angular components measured are Declination D (variation) and Inclination I (dip). Declination is the azimuth angle between the Geographical Meridian GM and the Magnetic Meridian MM. Inclination is the vertical angle between F and the horizontal measured in the direction of the Magnetic Meridian. The value of F, together with the components X (MM horizontal), Y and Z (vertical) may also be measured to an accuracy of 0.25%. The Mag-01H theodolite Declinometer/Inclinometer system comprises a high sensitivity, battery powered, magnetometer type Mag-01H together with a vector sensing fluxgate probe type 'A' which is mounted on a Wild T1 non-magnetic theodolite. The system is suitable for permanent installation on a suitable non-magnetic pillar in observatories, but the provision of a non-magnetic tripod and the re-chargeable batteries within the magnetometer permit mobile observatory use. The system is used in observatories to obtain reference data, which may be used in the construction of Reference Field Charts - See Figure 1. The mobility of the system permits highly detailed mapping of D and I. Other applications include checking of compasses and monitoring of the field for compass correction purposes. Detailed knowledge of local variation in D and I may be of assistance in interpreting total field magnetometer survey data. The ultimate resolution achieved with this system is limited by four factors: 1. Prevailing magnetic conditions - measurements during magnetic storms can be extremely
difficult to perform. 2. The Wild T1 theodolite has a resolution of 6 seconds of arc. 3. Plinth stability - the tripod is less stable with time and temperature than a stone pillar. 4. The noise level, and therefore resolution, of the magnetometer. Two sensitivity settings are
provided; x1 which produces a resolution of 1nT and x10 which produces a resolution of 0.1nT. The x10 sensitivity setting would normally only be used under ideal conditions.
The system is usually operated with the assigned magnetometer and theodolite combination specified in the test documentation. Should a replacement magnetometer be used then offset errors no greater than 5nT will be encountered and the accuracy of the system will not be compromised provided that the four-measurement method described in this manual is used. 1.1. The Null Method of Measurement Measurements are obtained by operating the theodolite-mounted vector response probe in the null mode. In this mode observations are performed with the fluxgate probe orientated perpendicular to the direction of the terrestrial magnetic field F. At an angle of 90o to the field the response of the magnetometer probe produces the greatest sensitivity to small changes in the field direction. High instrument stability, together with specific measurement procedures which nullify electronic and mechanical errors, produces angular measurements of absolute accuracy. The ultimate accuracy will depend on the prevailing magnetic conditions. The high flexibility probe connecting cable does not interfere with the measurement procedure and will operate down to very low temperatures.
OM2020 ISSUE 4 PAGE 5 OF 27
The use of low magnetic signature components within the Mag-01H instrument enables this unit to be used close to the probe head. Errors will not be significant with the probe and magnetometer as close as 0.5 metres, although the magnetometer is, in practice, usually placed on the ground. Variation in either Declination dD or Inclination dI around a fixed null point can be continuously monitored via the analog output. For small angular changes the relationship between magnetometer output and angle will be linear. 1.2. Resolution The theoretical resolution R to small changes in field direction is proportional to the resolution of the magnetometer and the strength of the perpendicular magnetic field. When measuring Inclination, the magnetic axis of the probe is parallel to the vertical plane of investigation and therefore the full field strength F is available and the resolution becomes RdI = F sine dI. When measuring Declination the magnetic axis of the probe is parallel to the horizontal plane of investigation and therefore only the horizontal field component H = F cosine I is available and the resolution becomes RdD = H sine dD. Therefore at any magnetometer resolution, resolution of Inclination I is dependent on the magnitude of F alone, whereas resolution of Declination D is dependent on H and I and will generally vary with latitude. e.g. where F = 47,000nT, I = 67°° On x1 sensitivity (1nT): RdI = circa 5 seconds RdD = circa 10 seconds On x10 sensitivity (0.1nT): RdI = circa 0.5 seconds RdD = circa 1.0 seconds Note: These are theoretical values and actual values will be determined by prevailing conditions. From the IGRF chart in Figure 1 it can be seen that resolution in Declination is a minimum at the poles and a maximum at the equator. 2.0 THE MAGNETOMETER See Figure 2 The Mag-01H instrument comprises an impact-resistant enclosure which contains the electronic circuitry, a rechargeable battery and liquid crystal display. The instrument operates in the following way: An excitation waveform is transmitted to the probe which returns a measurement signal. This is converted into a current by the signal processing electronics. The current is fed back to a winding within the probe to null the magnetic field experienced by the probe. In this way very linear and drift-free measurements are obtained. An analog voltage is generated by the signal processing circuitry. This is digitised and displayed on a liquid crystal display. It is also available as an analog output.

OM2020 ISSUE 4 PAGE 6 OF 27
An internal precision reference voltage is provided to produce a bipolar offset, which can be selected in 10 μT steps to back off the field experienced by the probe. In this way the measuring range can be extended without loss of resolution. The output from the rechargeable battery is converted into a dual voltage supply to power the circuitry. The battery is charged via the charging circuitry which is polarity protected. The external battery charger can be either a mains adaptor, producing 9 V to 18 V dc, or a vehicle dashboard connector. The battery voltage is continuously monitored and an alarm will sound if the voltage falls below 5 V. An LED illuminates whilst the battery is being re-charged. A new battery provides around 10 hours use after re-charge but this will reduce as the battery ages. THE BATTERY SHOULD NEVER BE ALLOWED TO BECOME COMPLETELY DISCHARGED. The liquid crystal display is an auto ranging 4½-digit display, which displays measurements in the range 0 to ±20μT with 1nT resolution and 0 to ±200μT with 10nT resolution. Use of the x10 control will increase this resolution. The display will indicate a positive value when the front of the probe is pointing towards North. Following switch-on, the battery voltage is displayed for a few seconds. 2.1. Front Panel Controls and Their Functions See Figure 3 Power Switch : to switch the instrument on. Sensitivity Switch : increases the sensitivity of the magnetometer by a factor of 10 to increase the measurement resolution from 1nT to 0.1nT. Charge : LED is illuminated when the unit is being charged. Probe : the probe cable is connected to the magnetometer unit via a Fischer 6-way socket. Offset : the rotary switch and toggle switch are used to supply an offset signal to the probe from 0 to ±90 μT in 10 μT steps. The display value (and analog output value) becomes the algebraic sum of the measured field strength and the value of the offset. Display : the auto-ranging LCD displays directly in μT units on x1 sensitivity
and μT x10 on the x10 sensitivity setting. The decimal point shifts to the left when display value decreases below 10.00 and to the right when display value increases above 19.999.
The display will over-range if a value above 199.99 occurs and will appear blank except for the sign and first digit: 1---- 2.2. Rear Panel Controls and Their Functions See Figure 4 Analog output : provides an analog output for logging continuously varying fields. On x1 sensitivity the full- scale range is 0 to ±500 μT
(100μT/V) with a resolution of 1nT. On x10 sensitivity the full-scale range is 0 to ±50μT (10μT/V) with a resolution of 0.1nT.

OM2020 ISSUE 4 PAGE 7 OF 27
Charger input : The unit is charged from either the power supply or a vehicle dashboard via a connecting cable; alternative 12 VDC sources can be used. The input is polarity protected against accidental incorrect connection. 2.3. The Magnetometer Probe See Figure 10 The probe consists of a precision fluxgate magnetic field sensor mounted within a tube. A joystick arrangement for trimming the alignment of the sensor relative to the tube is provided. The probe is mounted on a pillar, enclosed in a rugged housing, which fully protects it against mechanical damage or potential misalignment. The probe and enclosure are individually attached to a mounting plate, which is retained by four screws to the theodolite telescope. Gasket sealing is provided to prevent the ingress of moisture. The instrument is supplied with the probe aligned parallel to the optical axis of the theodolite to within 10 seconds of arc. A high flexibility cable connects the probe to the electronics unit. 2.4. Electromagnetic compatibility The Mag-01H instrument contains no high frequency electronics likely to cause emissions which could affect other apparatus. The design, including the use of a rechargeable battery, charged from a mains adaptor and decoupling of internal power supplies is intended to produce minimal emissions. Other equipment operating in the area is therefore unlikely to be affected. The unit is also unlikely to be affected by interference from other equipment in the normal operating environment. However the sensors are designed to measure magnetic fields and therefore are susceptible to electromagnetic interference. Operation close to a high frequency source of radiation should be avoided. Interference is indicated by instability in the reading when the probe is maintained in a fixed position. 3.0 THE THEODOLITE The Mag-01H and Mag A probe is supplied with a WILD T1 (6-second accuracy) non-magnetic theodolite. The accuracy stated is for the mean square of a single Circle Left (CL) measurement and a single Circle Right (CR) measurement. Circle Left and Circle Right refers to the position of the vertical circle housing relative to the observer. The theodolite is classed as non-magnetic and undergoes a rigorous magnetic hygiene inspection at Bartington Instruments prior to fitting the fluxgate probe. Any contamination is totally removed to guarantee complete magnetic cleanliness. Optical and magnetic calibrations are also carried out prior to despatch. The theodolite is not suited to operation under very wet conditions. Rough handling should be avoided as the bearing journals in this type of theodolite are manufactured from phosphor bronze and are not as strong as those manufactured in steel. Sufficient information is given in this manual to carry out routine checks and calibration. However, a full calibration service is offered by Bartington Instruments, together with optional certification at an observatory.

OM2020 ISSUE 4 PAGE 8 OF 27
3.1. Night Viewing The scale illumination lamp unit supplied by Wild is unsuitable due to its magnetic signature. The alternative recommended and supplied by Bartington is a chemiluminescent light stick. This should be 47mm length x circa 6 mm diameter. To illuminate, bend the light stick and place between the theodolite mirror and window. Night adjusted vision responds to this level of illumination but below freezing point the illumination may become inadequate. 3.2. Steep Sighting Prisms When performing steep angled telescopic observations or attempting to perform null mode magnetic measurements for shallow angles of I, a pair of steep sighting prisms will be required. These will extend the vertical-viewing angle from circa 40° to 18° There are two types of prism. The larger type fits the telescope eyepiece and results in an inverted image. The smaller prism fits the scale eyepiece and results in a non-inverted image. 3.3. Objective Sun and Orange Filters The sun filter must be fitted when performing solar observations; it provides an attenuation of above 1/100,000. Inspect the filter to ensure the free-floating silver membrane is present and undamaged prior to use. Frequently check that the filter is reliably fitted to the telescope objective lens during observations. Bartington Instruments can accept NO liability for injuries resulting from solar observations, as we have no control over the circumstances of use. The orange filter can be used to eliminate, for example, glare when viewing a target. 4.0 TAKING MEASUREMENTS See Figures 5, 6 and 7 This section describes the procedures for measurement of Declination and Inclination in the null mode. Four readings are obtained for calculation of D and four readings are obtained for calculation of I. Each set of four readings comprises two pairs of readings. One pair is averaged to eliminate electronic offset errors and the other pair is averaged to eliminate mechanical alignment errors (probe collimation). When making observations reference should be made to Figure 5, which describes the conventions for identifying the directions of observation when performing null mode measurements. Figures 6 and 7 give further details of the null mode of measurements. In the diagrams E, W, N and S refer to the direction in which the telescope is pointed, whilst U and D refer to the position of the sensor with respect to the telescope, U is UP (above the telescope) and D is DOWN (below the telescope). Declination is calculated from the mean of the four observations ED, WD, EU, WU. The reference observation for Declination is the Geographical Meridian (GM) obtained using a Circle Left / Circle Right observation to eliminate optical collimation errors. The azimuth reference for Declination may be surveyed relative to the reference position of the theodolite. Declination must be discovered before Inclination can be measured. Inclination is calculated from the mean of the four observations SU, ND, SD, NU with the telescope aligned with the calculated

OM2020 ISSUE 4 PAGE 9 OF 27
Magnetic Meridian. The reference observation for Inclination is the horizontal plane, which is automatically derived from the fluid filled gravity compensator in the vertical reference within the theodolite. Observations are made on the vertical circle, the plane of which must be parallel to the Magnetic Meridian. It is customary to record the time in Universal Time (U.T.) at which each of the eight measurements is recorded, the mean time for D and for I can then be subsequently calculated for record purposes. 4.1. Magnetic Hygiene Before attempting magnetic observations ensure adequate personal magnetic hygiene. For example, garments should be free from steel fasteners or buckles. Hygiene can be checked when commencing observations by moving hands, head and torso close to the magnetometer probe and observing any change in reading. Readings should not vary by more than 0.2nT. In practice only the hand used for circle slow motion adjustment will be close to the magnetometer sensor at critical times during measurement. Ultimate accuracy will depend on ambient magnetic noise. The diurnal variation of the terrestrial field becomes most active at dawn and dusk. 4.2. Theodolite Set Up
See figures 8 & 9 and Wild T1 Manual When moving to a new site allow at least 1 minute/1oK of temperature difference for allow the theodolite to teach the ambient temperature. To avoid ambiguous values for the magnetic meridian, place the theodolite on the pillar or tripod such that the 0/360º horizontal circle transition will be clear of the four declination null point readings. Levelling the theodolite (See also Wild T1 Manual) a) Use the three foot-screws to level the theodolite base using the circular level. b) Rotate the telescope to a horizontal position with the magnetometer at the top and apply the
vertical clamp. Release the horizontal clamp and align the tubular level between any two foot-screws A and B. Adjust foot-screw A to level the theodolite using the tubular level. Rotate 180 degrees and reduce any error to by half, again using foot-screw A.
c) Rotate by 90 degrees to align the tubular level with the third foot-screw C and adjust the level in that direction using foot-screw C. Rotate 180 degrees and reduce any error by half, again using foot-screw C.
d) Repeat as necessary. Setting over a reference point a) Position the tripod (if used) over the ground reference point with its head level.
Mount the theodolite and level the instrument using the circular plate level and foot-screws. (b) Focus the optical plummet (tripod only) on the graticule by turning the eyepiece and focus on
the ground point by pulling or pushing the eyepiece tube. Line up the graticule and target point by adjusting the tripod legs and/or instrument foot-screws as necessary.
(c) Re-level the instrument with the foot-screws and complete fine centering by moving the
instrument on the tripod head. If necessary repeat levelling and centering procedure until instrument is level, directly over the ground point.
The same procedure applies when siting the theodolite on a pillar, but in the case of the pillar the optical plummet would not be used and the pillar mount adaptor would be fitted to the theodolite.

OM2020 ISSUE 4 PAGE 10 OF 27
Attempt to level the theodolite using the tubular plate level to better than ± 15”. Each 2mm interval represents 30” error. If this cannot be achieved then there is a problem in the setting of the tubular level. This error can be completely eliminated using an adjuster pin as follows. (a) Attempt to level with tubular level set in line with a pair of levelling screws. (b) Rotate to the next pair of levelling screws and remove half the error using the tubular level
adjuster and half the error using both the level adjustment screws. (c) Rotate to the next pair of levelling screws and repeat the adjustment. (d) Rotate and continue adjustment until the desired accuracy is achieved. 4.3 Performing Observations of D & I with a Non-Resettable Horizontal Circle Theodolite The re-settable circle previously provided on the steel equivalent theodolite is not required for accurate measurement of D and I and has been eliminated. The likelihood of incorrect circle settings is reduced and the best observation method is adopted.
A digital calculator will be required which can convert degrees, minutes and seconds to decimal values and vice-versa. Alternatively, computer programs are available to assist with data reduction. An accurate digital clock with a large display positioned away from the theodolite is also required. The observation conventions are described pictorially in figures 5, 6 and 7.
Two optical and four magnetic measurements are performed for each observation and the results averaged to eliminate system optical and magnetic errors. Worked examples are given at the end of this section. The examples are for explanation only and do not show the system errors.
4.4 Performing Observation of Declination Connect the magnetometer probe cable to the magnetometer and switch on the instrument. Prior to commencing measurements, decide which sensitivity setting can be used. Attempt a trial null measurement on x10 sensitivity (0.1nT resolution). If noise exceeds 0.5nT p-p then x1 sensitivity setting should be used. This is recommended for most observations. IMPORTANT - A small (a few nT) offset error will be present when switching between the x1 and x10 sensitivity settings. This in no way affects observation accuracy provided that the sensitivity setting is not changed during any set of four measurements per observation. If the audio null indicator is fitted select an appropriate volume setting. For this observation a reference target with a known Azimuth (TA) is required. This is the angle subtended between the target and the Geographical Meridian (GM) at the point of observation. The target azimuth can be surveyed using GPS observations, solar or astral transit using appropriate tables and chronometer.
The setting of the horizontal circle will be arbitrary therefore the target datum (TD) reading must be recorded first. With the circles unclamped, roughly align the telescope with the target and clamp both circles. Then use the vertical and horizontal circle adjustment controls to align with the target. 1. Observe the target and record both the circle left (CL) and circle right (CR) horizontal circle
readings. Calculate the target datum (TD) as follows:

OM2020 ISSUE 4 PAGE 11 OF 27
TD(±90°) = (CL + CR)/2 Note:- this contains a ±90° component which will be subtracted when calculating D. 2. Set the vertical circle to 90º or 270º as appropriate. Perform the four null mode magnetometer
observations and calculate the Magnetic Meridian mean value (MM).
Where MM = (ED + WD + EU + WU)/4 3. Calculate the Declination (D)
Where D = MM + (TA) - TD ±90º
Select the value expected for D and reject the larger value.
Note
D will be positive if to the east and negative if to the west of GM
Observe correct use of brackets and signs Example (ideal observations)
If;
TA = -30º
CL = 260º
CR = 80º
EU, WD = 14º
WU, ED = 194º
TD(±90°) = (CL + CR)/2 = (260º + 80º) /2
= 170º
MM = (ED+ WD + EU + WU)/4
= (194º + 14º + 14º + 194º)/4 = 104º D = MM + (-30°) - TD ± 90° = 104º - 30º - 170º + 90º = - 6º - Select = 104º - 30º- 170º - 90º = - 186º - Reject

OM2020 ISSUE 4 PAGE 12 OF 27
4.5 Performing Observation of Inclination For this measurement the reference direction is the compensated vertical scale. 1. With the fluxgate sensor on the top of the telescope, set the telescope NU to the mean value
(MM) or (MM + 180º) on the horizontal circle, corresponding to the north observation of D and lock the horizontal circle.
2. Rotate the telescope in the vertical plane and obtain the (NU) and (SD) null magnetic
measurements 3. Rotate the telescope to MM or (MM + 180º) on the horizontal circle, corresponding to the south
observation of D, lock the horizontal circle and rotate the telescope in the vertical plane to obtain the SU and ND null magnetic measurements.
4. Calculate the Inclination, I.
Where I = [(360º - ND) + (180º - SU) + (SD - 180º) + NU ] /4 Example (ideal observations):
If; ND = 300º, SU = 120º, SD = 240º, NU = 60º
Then, I = (60º + 60º + 60º +60º) / 4 = 60º
The following page is a suggested record sheet for use when performing observations. This may be copied by the user as required.

OM2020 ISSUE 4 PAGE 13 OF 27
4.6 OBSERVATORY
D/I RECORD SHEET OBSERVATORY DATE OBSERVER
Degrees Minutes Seconds T.A. =
DECLINATION
Degrees Minutes Seconds Degrees Minutes Seconds CL
CR
TD(±90°)= (CL+CR)/2
Degrees Minutes Seconds TD(±90°)=
NULL ANGLE HORIZONTAL CIRCLE TIME TD (UT) Degrees Minutes Seconds Hours Minutes Seconds E.D. W.D. E.U. W.U.
MM = (ED+WD+EU+WU) /4 MEAN-TIME TD = (TED+TWD+TEU+TWU) /4
Degrees Minutes Seconds Hours Minutes Seconds MM = TD =
D = MM + (TA) - TD ± 90 Degrees Minutes Seconds
D =
INCLINATION Degrees Minutes Seconds Degrees Minutes Seconds` MM =
MM + 180° =
NULL ANGLE VERTICAL MEAN-TIME TI (UT)
Degrees Minutes Seconds Hours Minutes Seconds N.U. S.D. S.U. N.D.
I = [(360°-ND)+(180°-SU) + (SD-180°) + NU] /4 MEAN-TIME TI = (TND + TSU + TSD+ TNU) /4 Degrees Minutes Seconds Hours Minutes Seconds I =
TI =
SIGNED………………………………………

OM2020 ISSUE 4 PAGE 14 OF 27
5.0 REPAIR AND MAINTENANCE This section describes procedures for testing a theodolite and magnetometer system and carrying out field adjustments to maintain full accuracy. Procedures for mounting the probe on the theodolite are included. Maintenance procedures are restricted to probe cable test and repair and replacement of the Mag-01H battery. 5.1 Checking the System 5.1.1. Battery Check Connect the battery charger to a live supply and observe that the charge indicator illuminates. After 10 to 20 minutes switch on the magnetometer and observe that the battery voltage, shown at switch-on, has risen to between 6.5V and 7V. Disconnect the battery charger and switch the magnetometer off and on again. Observe that the battery voltage is not less than 6V 5.1.2. Functional Check Set the sensitivity switch to x1. Vary the orientation of the probe with respect to the direction of the earth's magnetic field and observe that the display responds by changes in sign and magnitude. Orientate the probe so that the display indicates some low value, e.g., approximately 5nT (+0.005μT). Momentarily select x10 sensitivity. The LCD should respond by displaying +0.050. Alternatively select ±30μT using the offset control and observe that the display responds by ±30 μT. 5.1.3. Theodolite Optical Check Eliminate optical errors. 5.1.4. Recalibration Offset errors should not exceed ±5nT per annum absolute worst case. Mechanical misalignment resulting from wear and tear cannot be predicted, but recalibration on a five-year basis is recommended. The entire system can be returned to the manufacturer for this to be carried out, if the user chooses not to attempt the adjustments. 5.2 Probe Alignment See Figure 10 The theodolite is set up in a site of known absence of magnetic gradients, less than 1nT per metre. In this procedure the telescope is erected vertically and rotated about the horizontal axis to discover and eliminate any errors due to differences between the magnetic and optical axis. Errors are removed using the joystick. Accuracy of this setting will depend on the magnitude of the horizontal geomagnetic field H at the geographical latitude. This will be strongly dependent upon the Inclination angle I and will yield a resolution equivalent to that of dD. This procedure is unaffected by any residual offset errors.

OM2020 ISSUE 4 PAGE 15 OF 27
For this procedure it is necessary to offset the vertical component Z of the geomagnetic field to obtain measurements with a resolution of 1nT. METHOD (a) To gain access to the joystick, remove the red protective cover at the cable gland end of the
probe enclosure. The probe collimation joystick adjuster is clamped by two screws which act against a clamping plate at the base of the joystick. These screws should be slackened one half turn each using the screwdriver provided to free the joystick. Some practice will be required to obtain the correct degree of slackness to permit adjustment. The screwdriver is magnetic and should be placed at least 4 meters distant when not required.
(b) Carefully level the theodolite. Switch on the magnetometer and adjust to obtain high resolution. Set the vertical circle to precisely 180o using the vertical scale and note the reading on the Mag-01H. (c) Release horizontal circle and rotate the theodolite. (d) Record the position and magnetometer value for the maximum and minimum magnetometer readings. Calculate the mean of the two magnetometer readings (R1 + R2)/2. (e) Set the direction of the theodolite to produce a maximum value and move the joystick in a
North-South direction along the Magnetic Meridian to obtain the mean value in (d). (f) Repeat steps (a) to (e), whilst gently re-tightening the clamping screws, until the difference
between two readings and each pair of readings is circa 1nT. Light finger tightness only should be used.
(g) Replace probe protective cover and four retaining screws. 5.3. Offset Trimming See Figures 5 and 12 The electronics in the magnetometer unit must be exposed to facilitate this adjustment. (a) Set up the theodolite as if to perform Inclination measurements. Select the x10 range and set
theodolite to position SU to achieve a null in I. Record this angular value. Rotate vertical circle to a position ND to achieve null and record the second value. In the presence of an offset error these values will not be 180o apart. Adjust the vertical circle to a value which is the mean of SU and ND, (ND + SU - 180)/2, and adjust the x10 offset potentiometer to produce a displayed magnetometer value of 00000.
(b) Select x1 sensitivity and adjust x1 offset potentiometer to produce a value of 0000.

OM2020 ISSUE 4 PAGE 16 OF 27
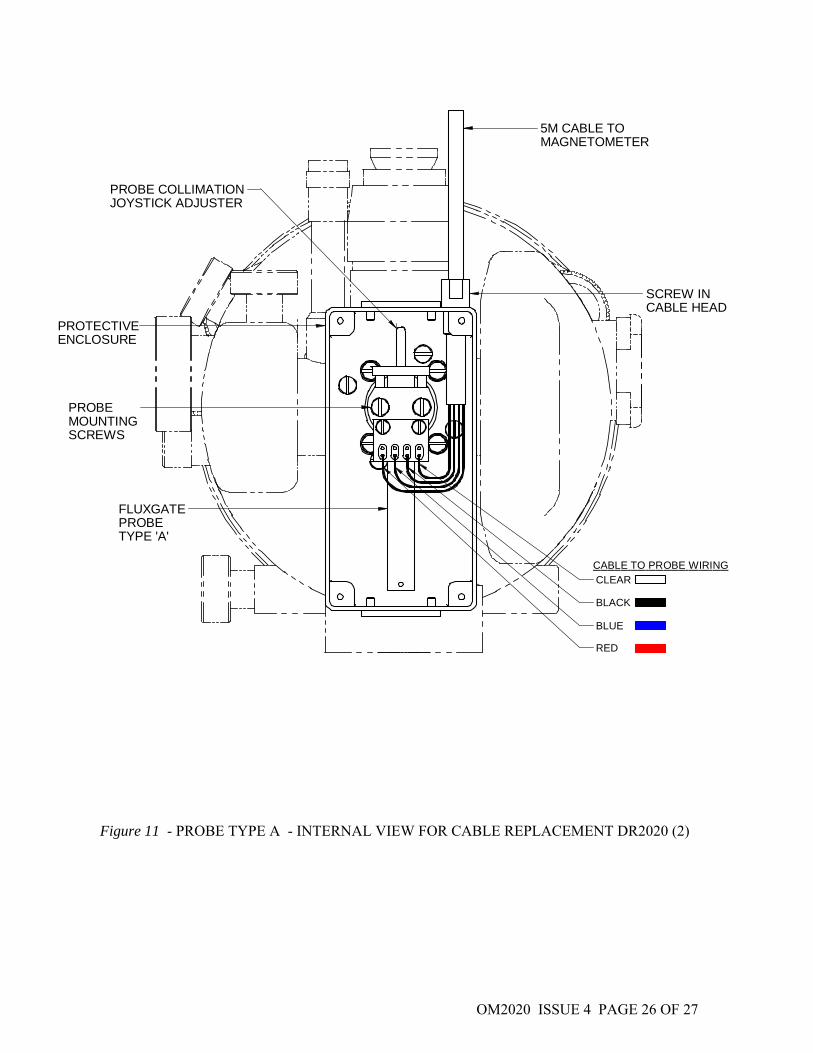
5.4. Probe Cable Repairs See Figures 10 and 13 Should the cable fail due to fatigue or damage the display will always read as if over-ranged. If the cable is suspected check the electrical resistance using a suitable meter and with reference to the values in Figure 13. The cable can be replaced in the following way: (a) Remove probe cover screws (b) De-solder the four wires from the tag strip (c) Release the screw that retains the earth lead (d) Unscrew the cable gland (e) Reconnect in the reverse order 5.5. Fitting the Magnetometer Probe Assembly See Figure 10 This is not a routine repair procedure and applies when fitting a new or replacement probe. The Mag Probe A comprises three parts: (i) The fluxgate magnetometer mounted on a mounting plate, which occupies the position of the
previously removed location plate. (ii) A protective enclosure which is retained in position around the magnetometer probe by an
attachment to the mounting plate. Fixing screws are supplied with this protective cover. (iii) A cable assembly consisting of a high flexibility audio grade cable terminated at one end
with a screw-in cable head for connection to the magnetometer probe and at the other end with a WW Fischer 6-pole waterproof connector.
If the cable is not already fitted to the cover follow the instructions for fitting in 5.4. Fitting the Protective Cover & Probe assembly (a) Remove the locating, adaptor plate from the theodolite and, if possible, save the screws as
they are useful for replacement parts. (b) Fit the mounting plate onto the theodolite and secure with four M3 countersunk screws. (c) Fit the cable assembly to the protective enclosure if not already fitted. (d) Place the protective cover (with lid removed) on the mounting plate and secure with four pan
head M3 screws. Do not over-tighten screws. Fitting the Magnetometer Probe (a) Place the probe pillar carefully into the counterbored position in the mounting plate and
almost tighten the two probe mounting screws. (b) Swing the direction of the probe to be precisely parallel with the optical axis of the
theodolite.

OM2020 ISSUE 4 PAGE 17 OF 27
(c) Fully tighten the probe retaining screws. (d) Connect the cable wire tails in the correct positions. The probe is now ready to be aligned. NOTE: Bartington Instruments cannot accept responsibility for the absolute vertical alignment of a sensor, relative to a theodolite telescope, when fitted by the customer after delivery. Some filing of the base of the pillar may be required due to unknown imperfections in the theodolite datum. 5.6. Mag-01H Battery Replacement See Figure 12
If the battery fails it can be replaced as follows:-
(a) Remove the top of the case. (b) Disconnect the push-on battery tags. (c) Remove the battery from the back panel clamp. (d) Install a new battery with the positive terminal to the left. (e) Re-connect the push-on battery tags, ensuring correct polarity. (f) Refit the top of the case.

OM2020 ISSUE 4 PAGE 18 OF 27
6.0 TECHNICAL SPECIFICATIONS 6.1. Mag-01H Electronics Unit Measuring range 0.1nT to 2mT Bandwidth - x1 sensitivity DC to 10 Hz (-3 dB) @ 20 μT p-p. Roll off -12dB per octave Calibration accuracy 0.1% Maximum resolution 0.1nT Zero field offset ±1nT @ 20˚C Offset drift 0.01nT/˚C Scaling temperature coefficient <10ppm/˚C Liquid crystal display 4½ digit autoranging x1 sensitivity
x10 sensitivity displays 0 to 20μT with 1nT resolution and 20 to 200μT with 10nT resolution displays 0 to 2μT with 0.1nT resolution and 2 to 20μT with 1nT resolution
Front panel on/off switch
probe input charge indicator offset control sensitivity control
switches on the internal battery 6 pole waterproof Fischer connector LED illuminated when external supply is connected allows ±90μT in steps of ±10μT to be subtracted from the field at the probe. increases the sensitivity of the magnetometer by a factor of 10
Rear panel Battery charger inlet
Analog output
2.1mm socket 6-18VDC 0.5A max. polarity protected, continuous or intermittent use. Full charge in 5 to 6 hours. 5V full scale via 2 x 4 mm rear panel insulated sockets
x1 sensitivity x10 sensitivity output impedance
100μT/V, ±500μT max, 1nT resolution 10μT/V, ±50μT max, 01nT resolution 1kohm
Enclosure high impact ABS Operating temperature -10˚C to +50˚C Relative humidity 80% non-condensing Environmental sealing to IP65 Dimensions 155 x 170 x 68mm Weight 950g 6.2 Theodolite Mounted Mag A Probe Calibration accuracy 0.1% Collimation error <20 seconds (collimation adjustment by joystick and clamp) Fluxgate probe mounting
temperature coefficient length
rigidly mounted on theodolite telescope <10ppm/˚C 55mm
Protective enclosure diecast aluminium housing , mechanically isolated from probe mounting Operating temperature -20˚C to 80˚C Dimensions 100 x 24 x 58mm Weight 250g 6.3 Connecting Cable Type 4-core overall screened high flexibility audio grade Length 5 m standard (alternative lengths available) Core-screen capacitance 160 pF/m Resistance 92 ohms/km Connector 6 pole Fischer waterproof 6.4 Theodolite Type Wild T1 non-magnetic theodolite, with carrying case Tripod Short wooden - non-magnetic 5/8″ - 11 UNC screw

OM2020 ISSUE 4 PAGE 19 OF 27
Figure 1 – INTERNATIONAL GENERAL REFERENCE FIELD DR0609 (1)
OM2020 ISSUE 4 PAGE 20 OF 27
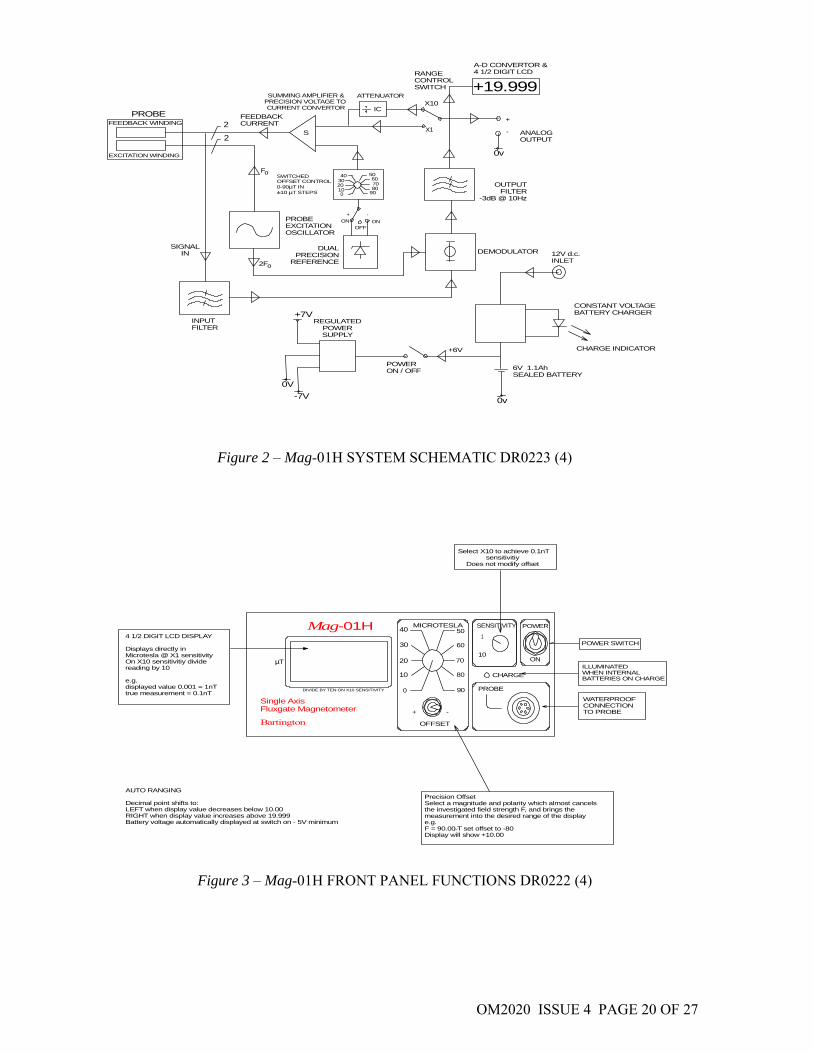
Figure 2 – Mag-01H SYSTEM SCHEMATIC DR0223 (4)
Figure 3 – Mag-01H FRONT PANEL FUNCTIONS DR0222 (4)
m
µT
Mag-01H
Select X10 to achieve 0.1nTsensitivitiy
Does not modify offset
POWER SWITCH
ILLUMINATED WHEN INTERNAL BATTERIES ON CHARGE
WATERPROOF CONNECTION TO PROBE
Precision OffsetSelect a magnitude and polarity which almost cancelsthe investigated field strength F, and brings themeasurement into the desired range of the displaye.g.F = 90.00 T set offset to -80Display will show +10.00
AUTO RANGING
Decimal point shifts to:LEFT when display value decreases below 10.00RIGHT when display value increases above 19.999Battery voltage automatically displayed at switch on - 5V minimum
4 1/2 DIGIT LCD DISPLAY
Displays directly inMicrotesla @ X1 sensitivityOn X10 sensitivitiy dividereading by 10
e.g. displayed value 0.001 = 1nTtrue measurement = 0.1nT
Bartington
MICROTESLA SENSITIVITY40
30
20
10
0
OFFSET
+ -
60
50
80
70
90
10
1
CHARGE
PROBE
ON
POWER
Single AxisFluxgate Magnetometer
DIVIDE BY TEN ON X10 SENSITIVITY
SIGNALIN
PROBE
EXCITATION WINDING
FEEDBACK WINDING
SUMMING AMPLIFIER &PRECISION VOLTAGE TO CURRENT CONVERTOR
6V 1.1AhSEALED BATTERY
0v
DEMODULATOR
CHARGE INDICATOR
CONSTANT VOLTAGEBATTERY CHARGER
12V d.c.INLET
+19.999
A-D CONVERTOR &4 1/2 DIGIT LCD
ANALOGOUTPUT
OUTPUTFILTER
-3dB @ 10Hz
-
0v
+
X10ATTENUATOR
RANGECONTROLSWITCH
SWITCHEDOFFSET CONTROL0-90µT IN±10 µT STEPS
2
2FEEDBACKCURRENT
S
Fo
IC
4060
50
X1
INPUTFILTER
o2F
REGULATEDPOWERSUPPLY
-7V0V
POWERON / OFF
+6V
90
DUALPRECISION
REFERENCE
+7V
PROBEEXCITATIONOSCILLATOR
+ON
-
OFF
10
30
0
20
ON
8070

OM2020 ISSUE 4 PAGE 21 OF 27
Figure 4 – Mag-01 & H REAR PANEL FUNCTIONS DR0237 (4)
Figure 5 – PLAN VIEW OF OBSERVATION POSITIONS FOR D & I DR0611 (2)
Va OUTPUT ++ 5V FS
z=1k
W
ANALOGUE OUTPUT ±5V maximum = ±500µT Offsets and range change apply ( For high field probe D ±4.5V = ±4.5µT)
2.1mm d.c. inletCharge from mains adaptor orvehicle dashboard cable
Voltage may be between 9-18V
Serial No.
FULL CHARGE 6 HOURS
POLARITY PROTECTED
12V DC
ED
V = 270
WD
V = 270
EU
V = 90
WU
V = 90
CR
CL
SU ND SD NU
N
W E
SMEASUREMENT OF INCLINATION
MEASUREMENT OF DECLINATION

OM2020 ISSUE 4 PAGE 22 OF 27
Figure 6 – OBSERVATIONS OF DECLINATION IN THE HORIZONTAL CIRCLE DR0612 (2)
Figure 7 – OBSERVATIONS OF INCLINATION IN THE VERTICAL CIRCLE DR0613 (2)
0360
3600
N(0)
(+Z)
S
NADIR
F
ANGLE OF INCLINATION I (DIP)IS THE VERTICAL ANGLE OF THETERRESTRIAL FIELD F RELATIVETO THE HORIZONTAL PLANE.THE PLANE OF THE VERTICAL CIRCLEIS SET PARALLEL TO THE MAGNETICMERIDIAN MM
THE HORIZONTAL DATUM (O) IS DETERMINEDBY THE PENDULUM COMPENSATEDVERTICAL REFERENCE (+Z)
AXIS
NULL
HORIZONTAL DATUM
VERT
ICAL
REF
EREN
CE
ISU SD
NUND
AXIS
NULL
-D
360 0
W (-90)(-Y)
(+90)(+Y) E
S
NMM
FGM(+X)
EU,WD
WU,ED
ANGLE OF DECLINATION D (VARIATION)IS THE AZIMUTH ANGLE BETWEEN THEGEOGRAPHICAL MERIDIAN GM AND THEMAGNETIC MERIDIAN MM
F IS THE DIRECTION OF THETERRESTRIAL FIELD
+TA
REFERENCETARGET DATUM
TD

OM2020 ISSUE 4 PAGE 23 OF 27
Figure 8 NON-MAGNETIC WILD T1 THEODOLITE
KEY OPERATIONAL FEATURES VIEW 1
FLUXGATE SENSOR
HIGH FLEXIBILITY CABLE TO MAGNETOMETER
MICROMETER
VERTICAL CIRCLE CLAMP
HORIZONTAL CIRCLE ADJUSTMENT
HORIZONTAL CIRCLE CLAMP
PILLAR MOUNT ADAPTOR (TRIVET)
TUBULAR LEVEL
VERTICAL CIRCLE ADJUSTMENT
TELESCOPE FOCUSING RING
GRATICULE FOCUSING RING
SCALE FOCUSING RING

OM2020 ISSUE 4 PAGE 24 OF 27
Figure 9
SOLAR OR ORANGE FILTER
SCALE ILUMINATOR MIRROR
OPTICAL PLUMB
LEVELLING SCREWS
STEEP SIGHTING PRISM (NON-INVERTING)
STEEP SIGHTING PRISM
TUBULAR LEVEL ADJUSTER
CIRCULAR LEVEL
NON-MAGNETIC WILD T1 THEODOLITE KEY OPERATIONAL FEATURES
VIEW 2
HORIZONTAL CIRCLE HOUSING
VERTICAL CIRCLE HOUSING

OM2020 ISSUE 4 PAGE 25 OF 27
Figure 10 – THEODOLITE MOUNTED PROBE TYPE ‘A’ ASSEMBLY DR2020 (2)
BLANKING PLUGS
MOUNTING PLATE
SOLAR / ORANGEFILTER
ENCLOSURE LID
ENCLOSURE GASKET
PROBE MOUNTINGSCREWS
FLUXGATE PROBETYPE 'A'
ENCLOSUREMOUNTINGSCREWS
ENCLOSURE
5M CABLE TOMAGNETOMETER
MOUNTING PLATESCREWS
THEODOLITE
STEEPSIGHTINGPRISMS
OM2020 ISSUE 4 PAGE 26 OF 27
Figure 11 - PROBE TYPE A - INTERNAL VIEW FOR CABLE REPLACEMENT DR2020 (2)
5M CABLE TOMAGNETOMETER
SCREW INCABLE HEAD
PROBE COLLIMATIONJOYSTICK ADJUSTER
PROBEMOUNTINGSCREWS
FLUXGATEPROBETYPE 'A'
CLEAR
BLACK
BLUE
RED
CABLE TO PROBE WIRING
PROTECTIVEENCLOSURE

OM2020 ISSUE 4 PAGE 27 OF 27
Figure 12 – Mag-01H INTERNAL VIEW DR0615(1)
Figure 13 – Mag-PROBE TYPE ‘A’ CABLE & CONNECTIONS DR0616(2)
-
RV3
PC 13 TP2
+
RV5
M1 DPM
RV4TP1
BR
OW
N
TP4
GR
EY
IC7
J1
TP3
8-WAYRIBBONCABLE
LK1
BATTERY 6V 1.2AhLEAD ACID GEL TYPE
VR3 X1 O/S
VR2 X10 O/SDPM SCALING
VR1PRECISIONREF.ADJUST
5200mm
ITEM 1WIRING SIDE VIEW
BLACKEx
CLEAREx
23
4
N.C.
SCREEN
1
RED +Fb6
5
42.5
MOGAMI CABLEPREPARATION
BLUE-Fb
PROBE ELECTRICALRESISTANCE VALUES+Fb to -Fb = 230 ±10Ω
Ex to Ex = 20 ±3Ω