optimal filter theory and applications - department of eehcso/it6303_3.pdf · optimal filter theory...
TRANSCRIPT

Chapter 3 Optimal Filter Theory and Applications
References:
B.Widrow and S.D.Stearns, Adaptive Signal Processing, Prentice-Hall, 1985
S.M.Stearns and D.R.Hush Digital Signal Analysis, Prentice-Hall, 1990
P.M.Clarkson, Optimal and Adaptive Signal Processing, CRC Press, 1993
S.Haykin, Adaptive Filter Theory, Prentice-Hall, 2002
1
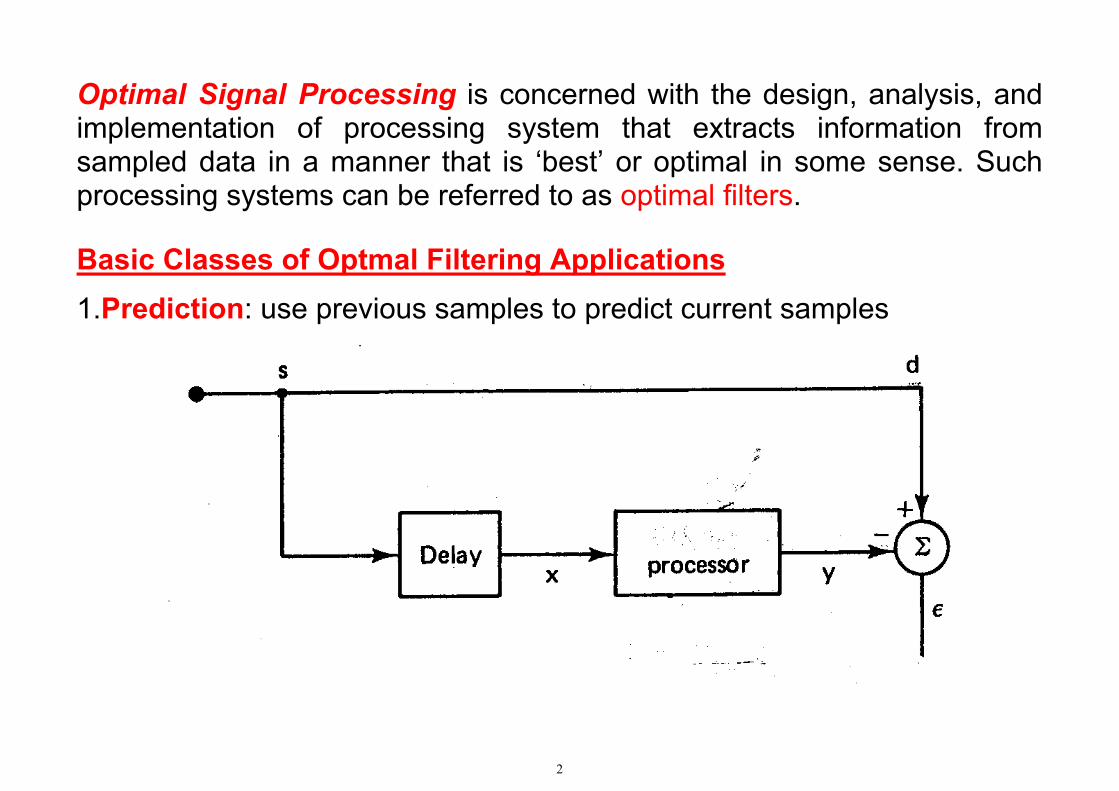
Optimal Signal Processing is concerned with the design, analysis, and implementation of processing system that extracts information from sampled data in a manner that is ‘best’ or optimal in some sense. Such processing systems can be referred to as optimal filters.
Basic Classes of Optmal Filtering Applications
1.Prediction: use previous samples to predict current samples
2

Speech Modeling using Linear Predictive Coding (LPC)
Since speech signals are highly correlated, a speech signal )(ns can be accurately modeled by a linear combination of its past samples:
)()(ˆ)(1
inswnsns iP
i−∑=≈
=
where }{ iw are known as the LPC coefficients. Techniques of optimal signal processing can be used to determine }{ iw in an optimal way.
2. Identification
3
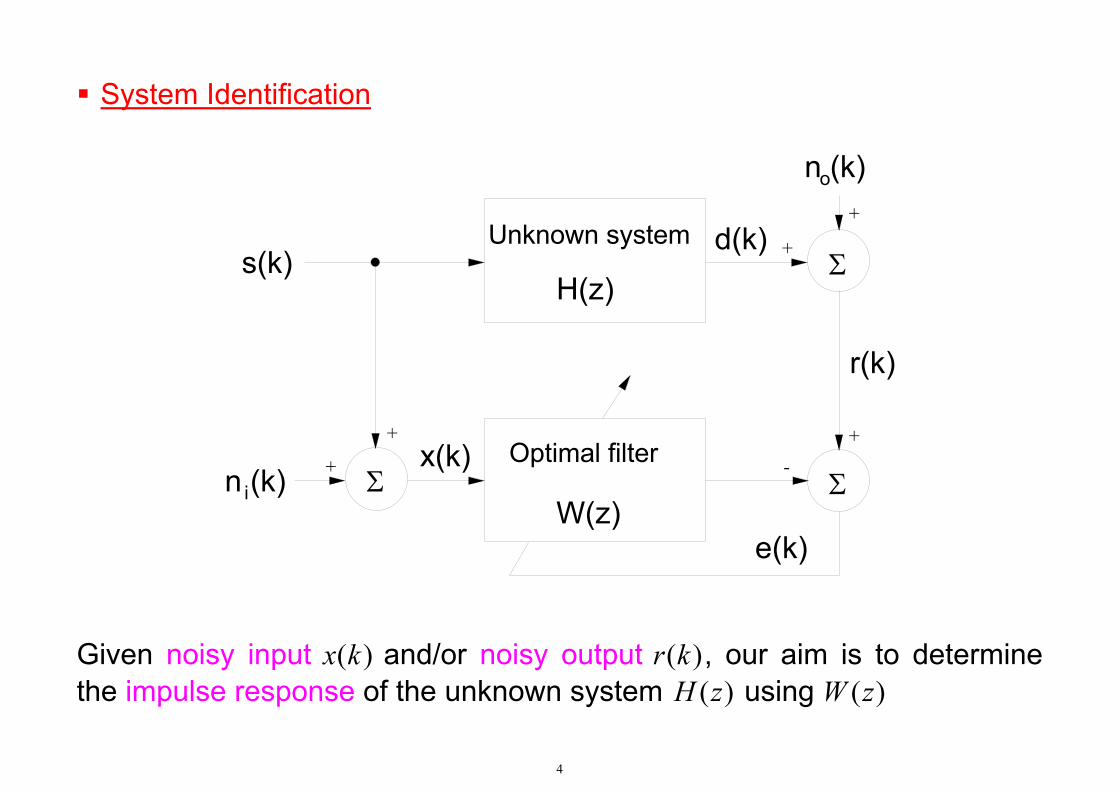
System Identification
Σ
ΣΣ
H(z)
Unknown system
Optimal filter
W(z)
+
++
+
+
-
s(k)
n (k)i
n (k)o
d(k)
r(k)
e(k)
x(k)
Given noisy input )(kx and/or noisy output )(kr , our aim is to determine the impulse response of the unknown system )(zH using )(zW
4

3. Inverse Filtering: find the inverse of the system
Signal Recovery
Given a noisy discrete-time signal:
)()()()( kwkhkskx +⊗=
where )(ks , )(kh and )(kw represent the signal of interest, unknown impulse response and noise, respectively. Optimal signal processing can be used to recover )(ks in an optimal way.
5
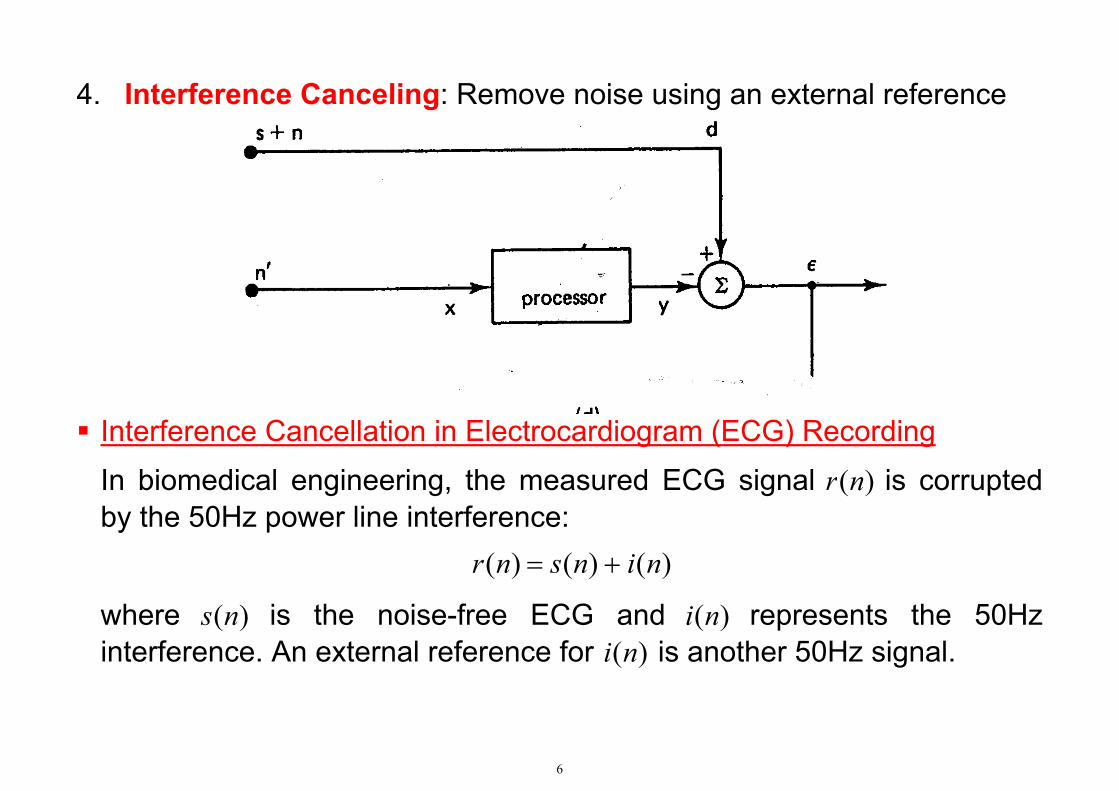
4. Interference Canceling: Remove noise using an external reference
Interference Cancellation in Electrocardiogram (ECG) Recording
In biomedical engineering, the measured ECG signal )(nr is corrupted by the 50Hz power line interference:
)()()( ninsnr +=
where )(ns is the noise-free ECG and represents the 50Hz interference. An external reference for )(ni is another 50Hz signal.
)(ni
6
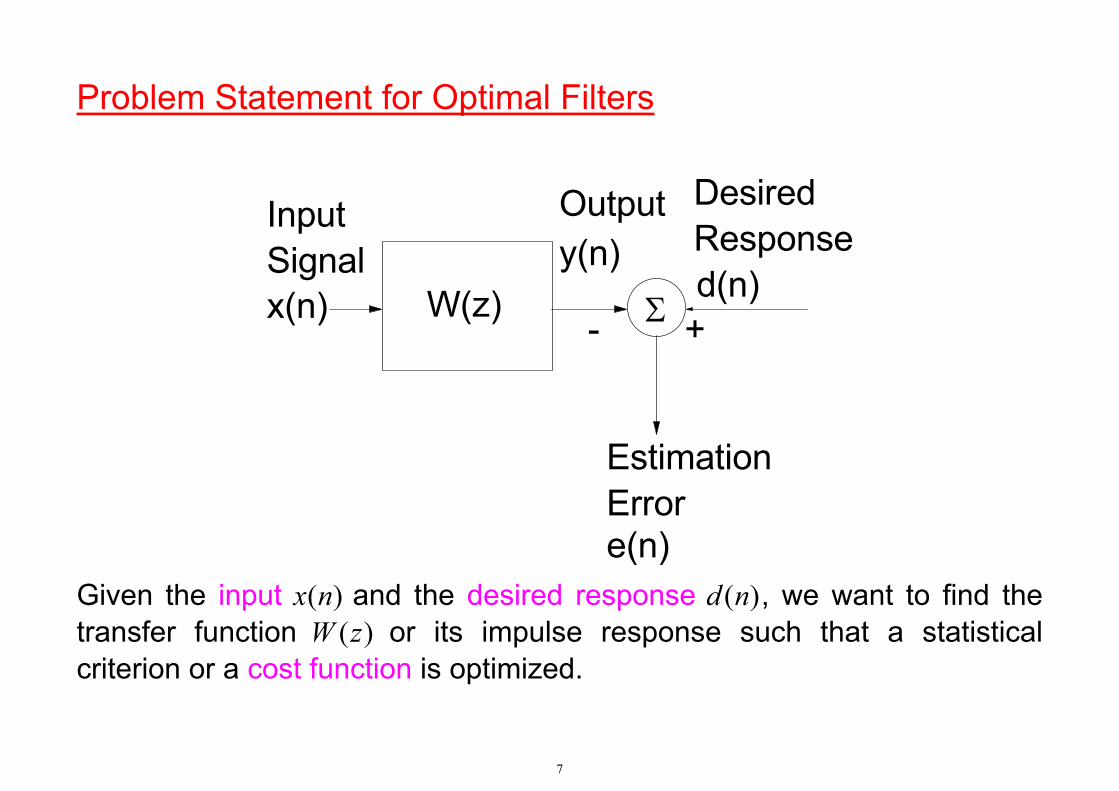
Problem Statement for Optimal Filters
W(z)x(n) Σ
y(n)d(n)
EstimationError
+-
InputSignal
Output
e(n)
DesiredResponse
Given the input and the desired response , we want to find the transfer function )
)(nx(
)(ndzW or its impulse response such that a statistical
criterion or a cost function is optimized.
7

Some common optimization criteria in the literature are: −1N
1.Least Squares : find )(zW that minimizes ∑=0
2 )(n
ne where N is the
number of samples available. This corresponds to least-squares filter design.
2.Minimum Mean Square Error : find )(zW that minimizes . This corresponds to Wiener filtering problem.
)}({ 2 neE
3.Least Absolute Sum : find )(zW that minimizes )(1
0ne
N
n∑−
=.
4.Minimum Mean Absolute Error : find )(zW that minimizes })({ neE .
5.Least Mean Fourth : find )(zW that minimizes . )}({ 4 neE
The first and second are two commonly used criteria because of their relatively small computation, ease of analysis and robust performance. In later sections it is shown that both viewpoints give rise to similar mathematical expression for )(zW .
Q.: An absolute optimization criterion does not exist? Why?
8

Least Squares Filtering For simplicity, we assume )(zW is a causal FIR filter of length so that L
∑=−
=
−1
0)(
L
i
ii zwzW (3.1)
The error function is thus given by )(ne )()()( nyndne −= (3.2) where
)()()(1
0nXWinxwny TL
ii =∑ −=
−
=,
T
TLL
LnxLnxnxnxnX
wwwwW
)]1()2()1()([)(
][ 1210
+−+−−=
= −−
L
L
9
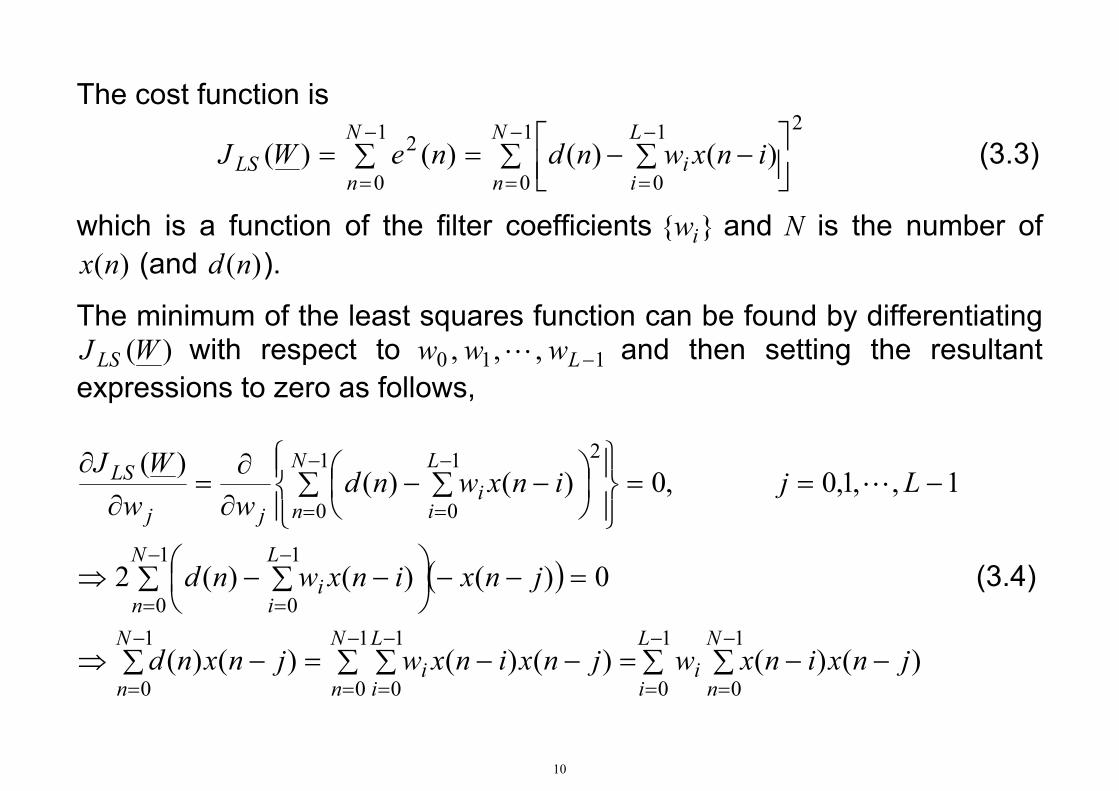
The cost function is
21
0
1
0
1
0
2 )()()()( ∑
∑ −−=∑=
−
=
−
=
−
=
N
n
L
ii
N
nLS inxwndneWJ (3.3)
which is a function of the filter coefficients }{ iw and N is the number of )(nx (and )(nd ).
The minimum of the least squares function can be found by differentiating )(WJLS with respect to ,,, 110 −Lwww L and then setting the resultant
expressions to zero as follows,
( )
∑ ∑ −−∑ =∑ −−=∑ −⇒
=−−∑
∑ −−⇒
−==
∑
∑ −−
∂∂
=∂
∂
−
=
−
=
−
=
−
=
−
=
−
=
−
=
−
=
−
=
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
21
0
)()()()()()(
0)()()(2
1,,1,0,0)()()(
L
i
N
ni
N
n
L
ii
N
n
N
n
L
ii
N
n
L
ii
jj
LS
jnxinxwjnxinxwjnxnd
jnxinxwnd
Ljinxwndww
WJL
(3.4)
10

Denote
Tdxdxdxdxdx LRLRRRR )]1(ˆ)2(ˆ)1(ˆ)0(ˆ[ˆ +−+−−= L (3.5)
where
1,,1,0,)()()(ˆ 1
0−=∑ −=−
−
=LjjnxndjR
N
ndx L
and
+−+−+−−+−+−
−+−+−−
=
)1,1(ˆ)1,1(ˆ)1,0(ˆ)2,0(ˆ
)1,0(ˆ)0,1(ˆ)0,2(ˆ)0,1(ˆ)0,0(ˆ
ˆ
LLRLRLRLR
RLRLRRR
R
xxxxxx
xx
xx
xxxxxxxx
xx
O
MOL
O
L
where
∑ −−=−−−
=
1
0)()(),(ˆ N
nxx jnxinxjiR
11

In practice, for stationary signals, we use
−−−
+−+−−
=
)0(ˆ)2(ˆ)1(ˆ)2(ˆ
)1(ˆ)1(ˆ)2(ˆ)1(ˆ)0(ˆ
ˆ
xxxxxx
xx
xx
xxxxxxxx
xx
RLRLRLR
RLRLRRR
RO
MOL
O
L
(3.6)
where
)(ˆ)()()(ˆ 1
0iRinxnxiR xx
iN
nxx −=+∑=
−−
=
As a result, we have
( ) dxxxLS
LSxxdx
RR
WRR
ˆ
ˆˆ1
⋅
⋅=−W ˆ=⇒
(3.7)
ˆprovided that xxR is nonsingular.
12

Example 3.1
Σ h zi=0
4
i-i
Σ w zi=0
4
i-i
Σ
x(n)
d(n)
y(n) e(n)
+
-
Unknown System
Σq(n)+
+
In this example least squares filtering is applied in determining the impulse response of an unknown system. Assume that the unknown impulse response is causal and {h }={1,2,3,2,1}. Given i N samples of )(nx and )(nd where )(nq is a measurement noise.
13

We can use MATLAB to simulate the least squares filter for impulse response estimation. The MATLAB source code is as follows,
%define the number of samples N=50;
%define the noise and signal powers noise_power = 0.0; signal_power = 5.0;
%define the unknown system impulse response h=[1 2 3 2 1];
%generate the input signal which is a Gaussian white noise with power 5 x=sqrt(signal_power).*randn(1,N);
14

%generate R_xx corr_xx=xcorr(x); for i=0:4 for j=0:4 R_xx(i+1,j+1)= corr_xx(N+i-j); end end
%generate the desired output plus noise d=conv(x,h); d=d(1:N)+sqrt(noise_power).*randn(1,N);
%generate R_dx corr_xd = xcorr(d,x); for i=0:4 R_dx(i+1) = corr_xd(N-i); end
%compute the estimate channel response W_ls = inv(R_xx)*(R_dx)'
15
−−
−−
=
6413.2514044.244998.368182.115115.44044.246413.2514044.244998.368182.114998.364044.246413.2514044.244998.368182.114998.364044.246413.2514044.24
5115.48182.114998.364044.246413.251
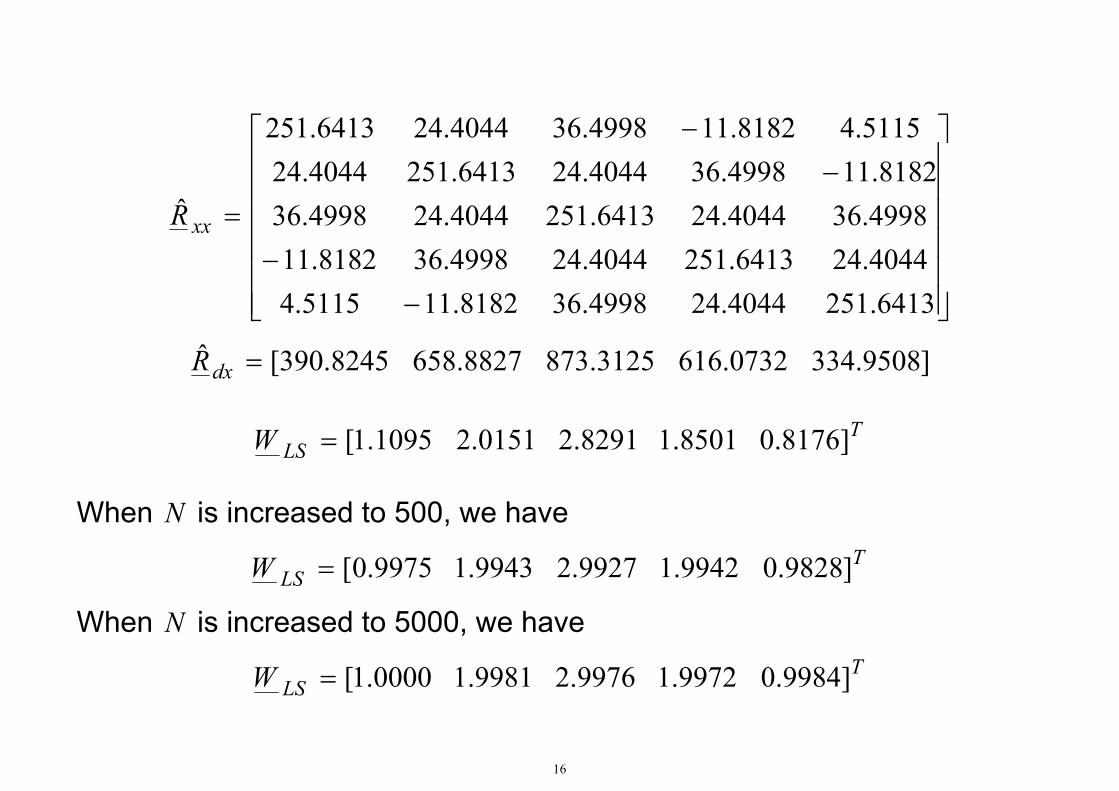
ˆxxR
]9508.3340732.6163125.8738827.6588245.390[ˆ =dxR
TLSW ]8176.08501.18291.20151.21095.1[=
When N is increased to 500, we have
TLSW ]9828.09942.19927.29943.19975.0[=
When N is increased to 5000, we have
TLSW ]9984.09972.19976.29981.10000.1[=
16

When 500=N and the noise power is 0.5 (SNR=10 dB), we have
TLSW ]9925.09773.19728.29826.10158.1[=
When 500=N and the noise power is 5.0 (SNR=0 dB), we have
TLSW ]0591.10249.29484.20138.20900.1[=
It is observed that 1. The estimation accuracy improves as N increases. It is reasonable
because as N increases, the accuracy of xxR̂ and dxR̂ increases due to more samples are involved in their computation.
2. The estimation accuracy improves as the noise power decreases.
17

Example 3.2
Find the least squares filter of the following one-step predictor system:
s(n)
zz-1 Σ-b + b z-110
+
e(n)
d(n)
x(n)
where )12/2sin(2)( nns π=
−π
=−=12
)1(2sin2)1()( nnsnx
)()( nsnd =
18

Given , the aim is to find and in least squares sense. )(nd 0b 1b The MATLAB source code is as follows,
N=50; %define the number of samples
n=0:N-1; d=sin(2.*pi.*n./12); %generate d(n) x= d(2:N); %generate x(n) from d(n) d=d(1:N-1); %keep lengths of x(n) and d(n) equal corr_xx=xcorr(x,’unbiased’); %unbiased estimate of correlation for i=0:1
for j=0:1 R_xx(i+1,j+1)= corr_xx(N-1+i-j);
end end
19
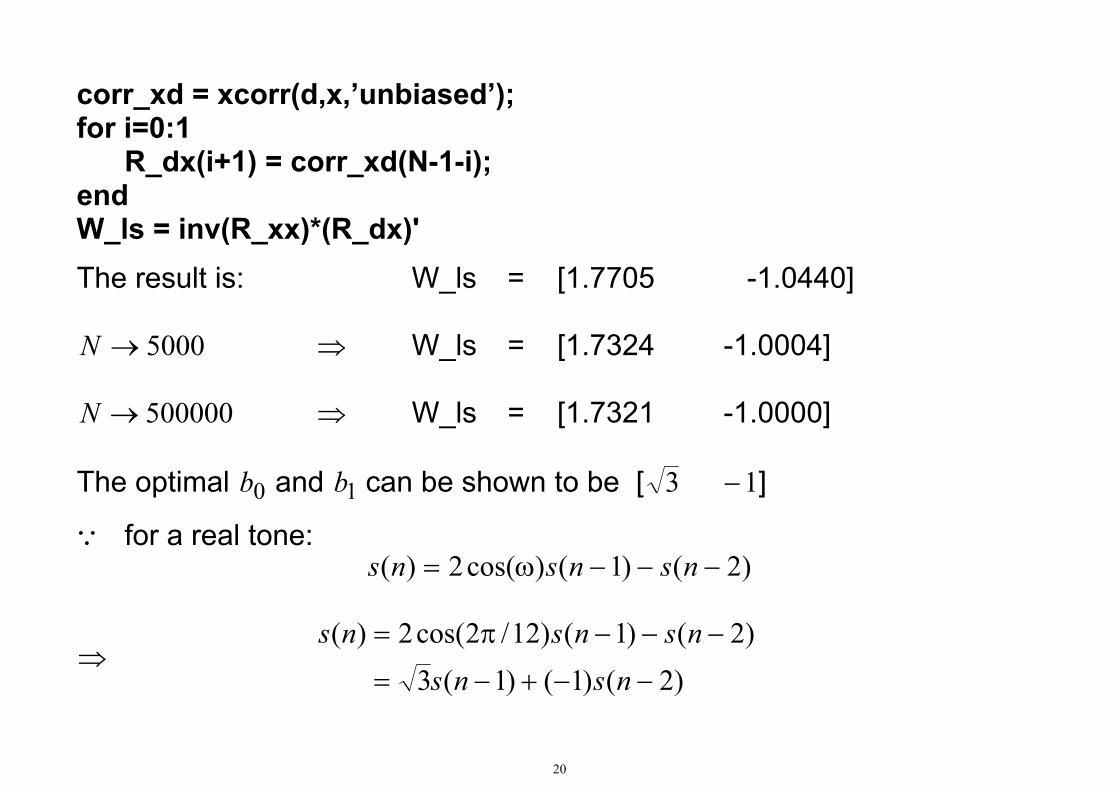
corr_xd = xcorr(d,x,’unbiased’); for i=0:1
R_dx(i+1) = corr_xd(N-1-i); end W_ls = inv(R_xx)*(R_dx)'
The result is: W_ls = [1.7705 -1.0440]
5000→N W_ls = [1.7324 -1.0004] ⇒
500000→N W_ls = [1.7321 -1.0000] ⇒ The optimal and can be shown to be [0b 1b 13 − ]
Q for a real tone:
)2()1()cos(2)( −−−ω= nsnsns
⇒ )2()1()1(3
)2()1()12/2cos(2)(−−+−=
−−−π=
nsnsnsnsns
20

Wiener Filtering The cost function to be minimized is )}({)( 2 neEWJMMSE (3.8) = Following the derivations in the least squares filter, the minimum of
)(WJMMSE is found by
( )
{ } { }∑ −−=
∑ −−=−⇒
=
−−
∑ −−⇒
−==
∑ −−
∂∂
=∂
∂
−
=
−
=
−
=
−
=
1
0
1
0
1
0
21
0
)()()()()()(
0)()()(2
1,,1,0,0)()()(
L
ii
L
ii
L
ii
L
ii
jj
MMSE
jnxinxEwjnxinxwEjnxndE
jnxinxwndE
LjinxwndEww
WJL
(3.9)
21

Assume and are jointly stationary, we have )(nd )(nx
1,,1,0,)()(1
0−=∑ −=−
−
=LjjiRwjR
L
ixxidx L (3.10)
Define
Tdxdxdxdxdx LRLRRRR )]1()2()1()0([ +−+−−= L (3.11)
and
−−−
−−−
=
)0()1()2()1()1()2(
)2()1()1()2()1()0(
xxxxxxxx
xxxx
xxxx
xxxxxxxx
xx
RRLRLRRLR
LRRLRLRRR
R
L
O
MOM
O
L
(3.12)
As a result,
( ) dxxxMMSE
MMSExxdx
RRW
WRR
⋅=⇒
⋅=−1 (3.13)
provided that xxR is nonsingular.
22
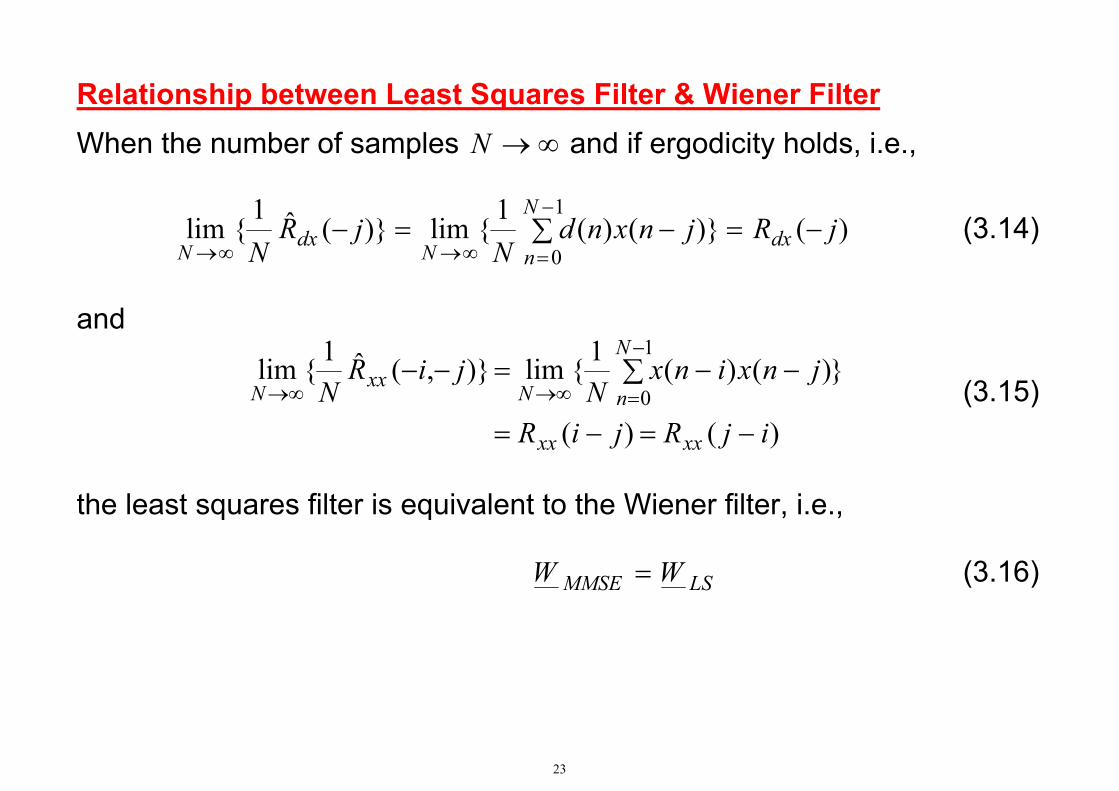
Relationship between Least Squares Filter & Wiener Filter
When the number of samples ∞→N and if ergodicity holds, i.e.,
∑ −=−=−−
=∞→∞→
1
0)()}()(
1{lim)}(ˆ1
{limN
ndx
Ndx
NjRjnxnd
NjR
N (3.14)
and
)()(
})()(1{lim)},(ˆ1{lim1
0
ijRjiR
jnxinxN
jiRN
xxxx
N
nNxx
N
−=−=
∑ −−=−−−
=∞→∞→ (3.15)
the least squares filter is equivalent to the Wiener filter, i.e., LSMMSE (3.16) WW =
23
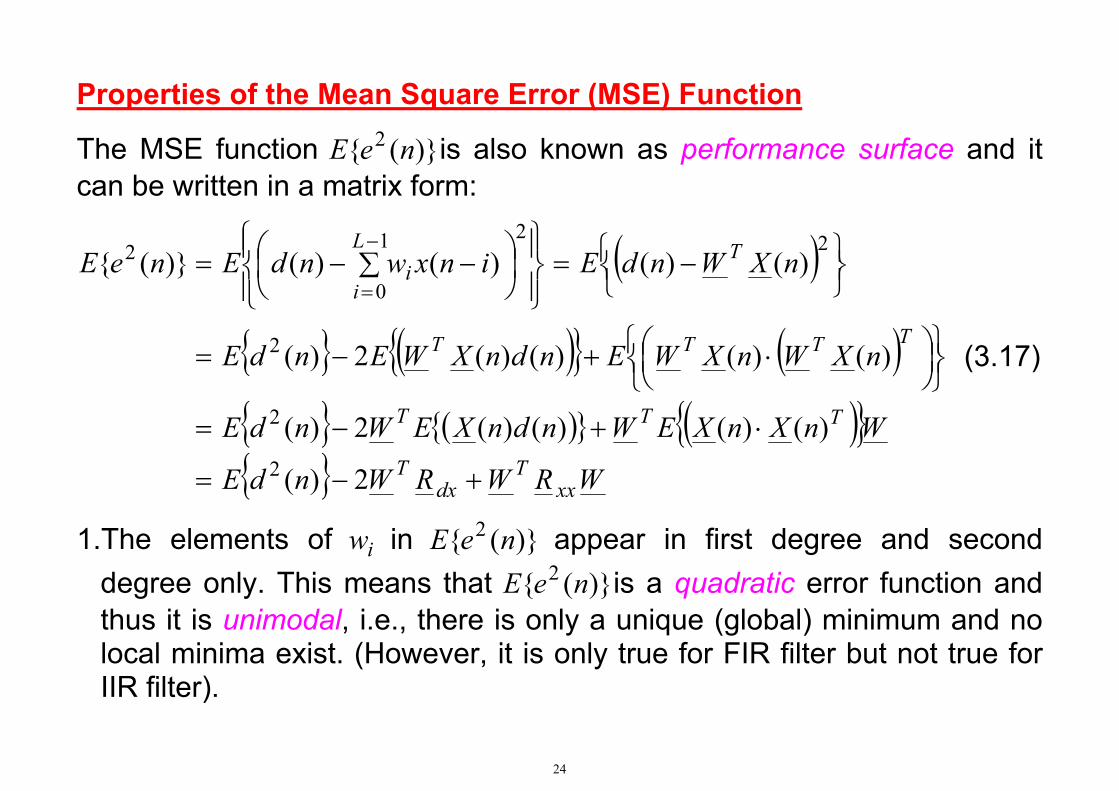
Properties of the Mean Square Error (MSE) Function
The MSE function is also known as performance surface and it can be written in a matrix form:
)}({ 2 neE
( )
{ } ( ){ } ( ){ } ( ){ } ( ){ }{ } WRWRWndE
WnXnXEWndnXEWndE
nXWnXWEndnXWEndE
nXWndEinxwndEneE
xxT
dxT
TTT
TTTT
TL
ii
+−=
⋅+−=
⋅+−=
−=
∑ −−=
−
=
2)(
)()()()(2)(
)()()()(2)(
)()()()()}({
2
2
2
221
0
2
(3.17)
1.The elements of in appear in first degree and second degree only. This means that 2 is a quadratic error function and thus it is unimodal, i.e., there is only a unique (global) minimum and no local minima exist. (However, it is only true for FIR filter but not true for IIR filter).
iw )}({ 2 neE{eE )}(n
24

An example for is shown below: 2=L
25
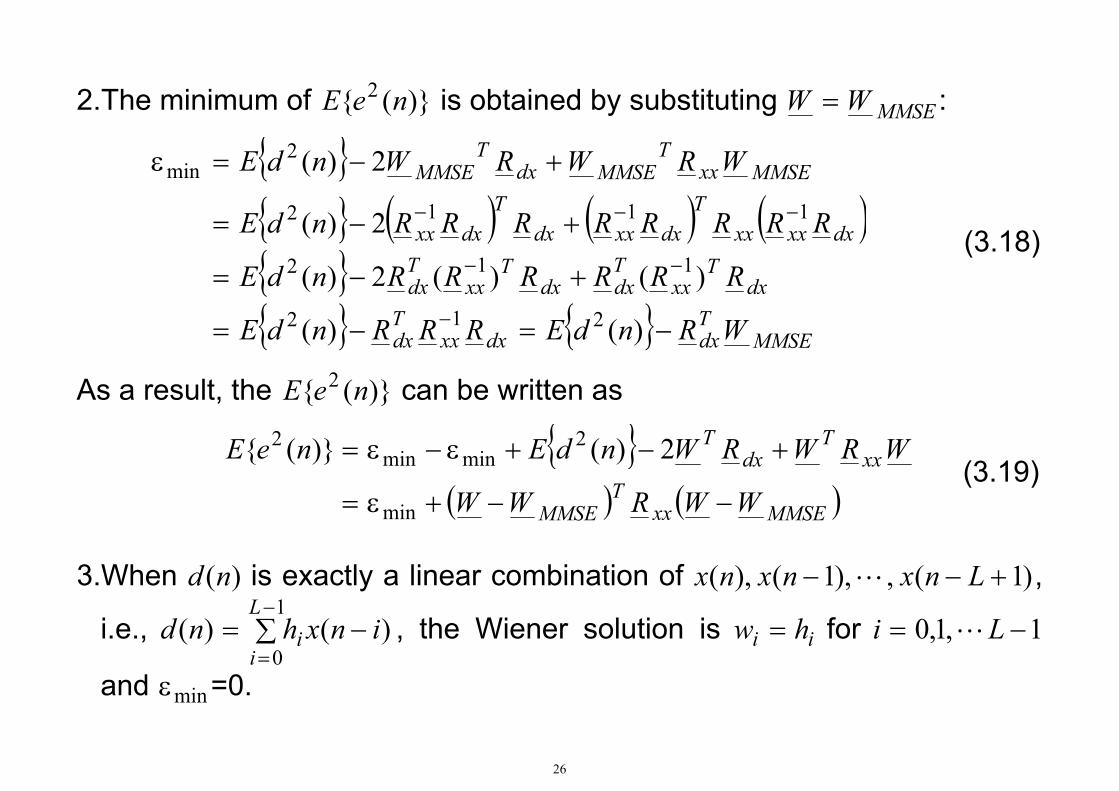
2.The minimum of is obtained by substituting )}({ 2 neE MMSEWW = :
{
}{ } ( ) ( ) ( ){ }{ } { } MMSE
Tdxdxxx
Tdx
dxT
xxTdxdx
Txx
Tdx
dxxxxxT
dxxxdxT
dxxx
MMSExxT
MMSEdxT
MMSE
WRndERRRndE
RRRRRRndE
RRRRRRRRndE
WRWRWndE
−=−=
+−=
+−=
+−=ε
−
−−
−−−
)()(
)()(2)(
2)(
2)(
212
112
1112
2min
(3.18)
As a result, the can be written as )}({ 2 neE
{
}
( ) ( )MMSExxT
MMSE
xxT
dxT
WWRWW
WRWRWndEneE
−−+ε=
+−+ε−ε=
min
2minmin
2 2)()}({ (3.19)
3.When is exactly a linear combination of )(nd )1(,),1(),( +−− Lnxnxnx L
ii hw
,
i.e., −1L
, the Wiener solution is ∑ −=0
)((i
i inxhd =)n = for 1,1,0 −= Li L
and =0. minε
26

Example 3.3 Determine the performance surface and the Wiener filter coefficients of the following system,
zz-1
Σ
w1w0
x(n)
d(n)-- +
where
=
==
87
,2112
,42)}({ 2dxxx RRndE
27
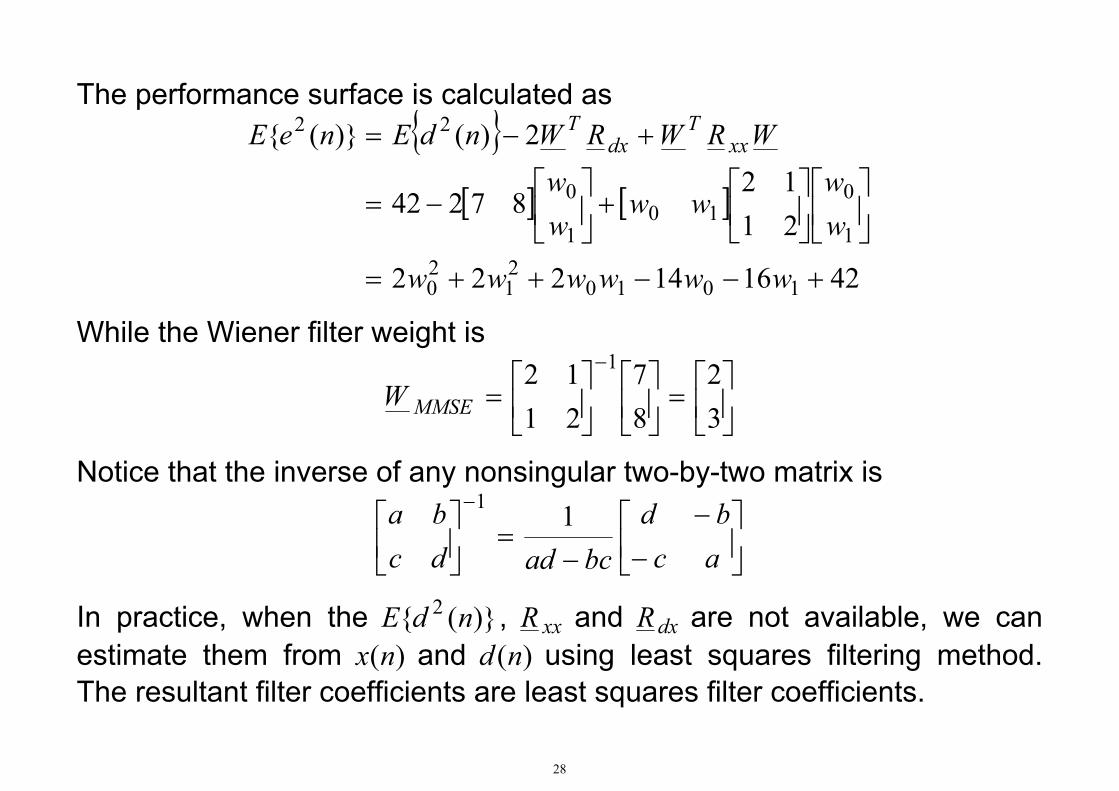
The performance surface is calculated as
{ } 2)()}({ 22 −= RWndEneE T
[ ] [ ]
421614222
2112
87242
101021
20
1
010
1
0
+−−++=
+
−=
+
wwwwww
ww
wwww
WRW xxT
dx
While the Wiener filter weight is
=
=
−
32
87
2112 1
MMSEW
Notice that the inverse of any nonsingular two-by-two matrix is
−1
−
−
−=
acbd
bcaddcba 1
In practice, when the )}({ 2 ndE , xxR and dxR are not available, we can estimate them from (x and (n using least squares filtering method. The resultant filter coefficients are least squares filter coefficients.
)n d )
28

Example 3.4
Find the Wiener filter of the following system:
s(n)
zz-1 Σ-b + b z-110
+
e(n)
d(n)
x(n)
where )12/2sin(2)( nns π= .
It can be seen that
−π
=12
)1(2sin2)(
nnx and
π
==122
sin2)()(n
nsnd .
The required statistics )0(xxR , )1(xxR , )0(dxR and )1(−dxR are computed as follows.
29

Using
2)2cos(1
)(sin 2 AA
−=
and
( ))cos()cos(21
)sin()sin( BABABA +−−=
then
( )
( ) 1})1(4{cos12
))1(2(2cos12
12)1(2sin2
12)1(2sin2)0(
=−π+=
−π−
=
−π
⋅
−π
=
nE
nE
nnERxx
30

23
122cos
122
12)1(2cos
122
12)1(2cos
122sin2
12)1(2sin2)1(
=
π−
=
π
+−π
−
π
−−π
=
π
⋅
−π
=
nnnnE
nnERxx
21
124
cos122
sin212
)2(2sin2)1(
23
122
sin212
)1(2sin2)0(
=
π−
=
π
⋅
−π
=−
=
π
⋅
−π
=
nnER
nnER
dx
dx
As a result,
−
=
=
−
13
2123
123
23
1~~
1
1
0
bb
31

The performance surface is given by
{ }
[ ]
133
123
23
1
21
23
21
2)()}({
101021
20
1
010
1
0
22
+−−++=
⋅
⋅+
⋅
−=
+−=
bbbbbb
bb
bbbb
WRWRWndEneE xxT
dxT
Notice that Moreover, the minimum MSE is computed as
.1)}({)}({ 22 == nxEndE
{ }0
21
23
113
21
23
1
)(2min
=+−=
−
⋅
−=
−=ε MMSETdxWRndE
This means that the optimal predictor is able to shift the phase of the delayed sine wave and achieve exact cancellation, resulting in 0min =ε
32
Questions for Discussion 1. A real sinusoid )cos()( θ+ω= nAns obeys
)2()1()( 21̀ −⋅+−= nsansans
where )cos(21 ω=a and 12 −=a . Is )(ns a 2nd order AR process? 2. Can we extend the least squares filter or Wiener filter to the general IIR
system model? Try to answer this question by investigating the Wiener filter using a simple IIR model:
11
0
1)(
−−=
za
bzW
That is, given )(kd and )(kx . What are the optimal and in mean square error sense? Assume that )(
0b 1akx is white for simplicity.
33

W(z)x(k) Σ
y(k)d(k)
EstimationError
+-
InputSignal
Output
e(k)
DesiredResponse
Steps:
(i) develop )(ke (ii) compute )}({ 2 keE in terms of xxR and dxR only. (iii) differentiate )}({ 2 keE w.r.t. and 0b 1a
34
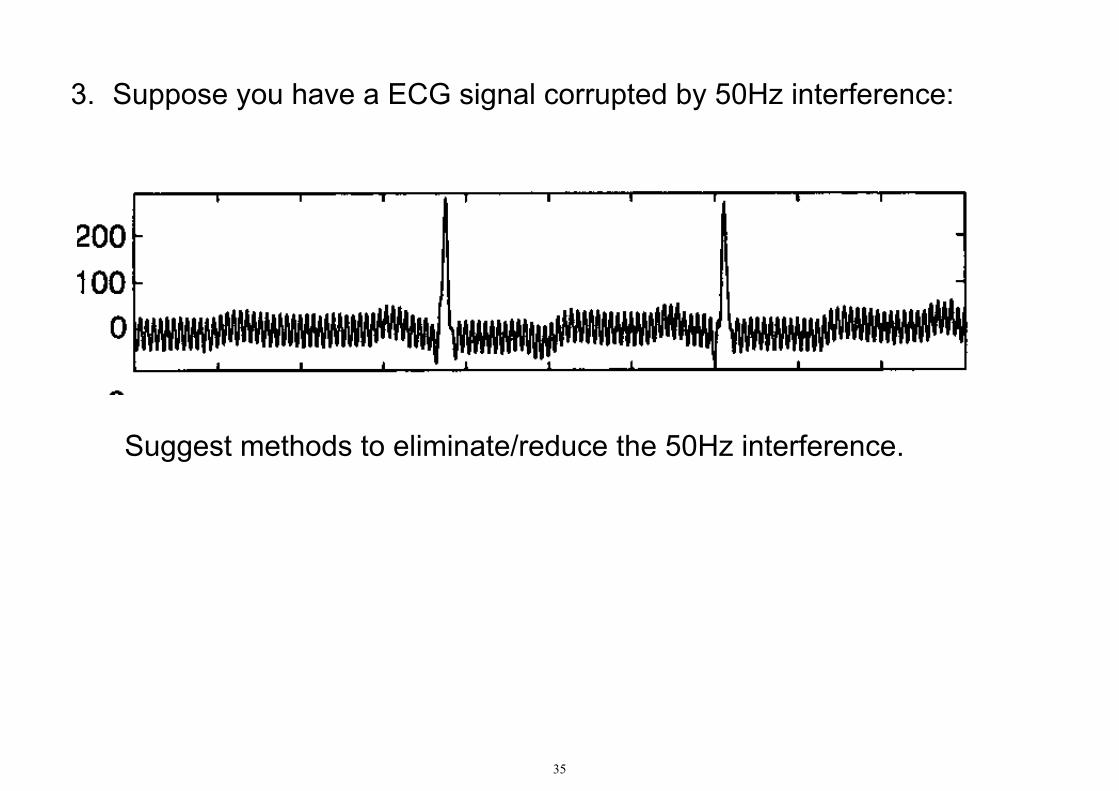
3. Suppose you have a ECG signal corrupted by 50Hz interference:
Suggest methods to eliminate/reduce the 50Hz interference.
35