optimasi bi-objektif , rizka rhomadona, ft ui, 2017
TRANSCRIPT
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
Optimasi Bi-Objektif dalam Perencanaan Terintegrasi Terminal Peti Kemas Internasional PT. Pelabuhan Tanjung Priok
Rizka, Komarudin
Laboratorium Rekayasa Sistem, Pemodelan, dan Simulasi Departemen Teknik Industri, Fakultas Teknik Universitas Indonesia
Kampus Baru UI Depok 16424 Tel: (021) 7270011 ext 51. Fax: (021) 7270077
*e-mail: [email protected]
Abstrak Volume pengiriman peti kemas yang terus meningkat, mendorong pihak pelabuhan/terminal peti kemas untuk semakin meningkatkan performa. Ditambah lagi dengan semakin ketatnya persaingan antar terminal. Penerapan perencanaan yang optimal dapat membantu terminal peti kemas untuk menghadapi tantangan tersebut. Penelitian ini membahas proses optimasi perencanaan terintegrasi pada sebuah terminal peti kemas di Indonesia, dengan menggunakan dua fungsi tujuan dari segi waktu dan biaya operasional. Penelitian ini menghasilkan model dengan beberapa skenario yang telah disesuiakan dengan kondisi operasional terminal sehingga dapat menjadi salah satu bahan pertimbangan bagi pihak terminal untuk meningkatkan performa mereka, khususnya dalam perencanaan level taktis.
Kata Kunci : Bi-objective optimization, mixed integer programming, perencanaan level taktis, terminal peti kemas Bi-Objective Optimization for Container Terminal Integrated Planning at Ocean Going Terminal
PT. Pelabuhan Tanjung Priok
Abstract The increased number of container shipping nowadays, brought new challenges for container terminal to improve their operational performance. In addition with the increase of competition between ports, optimal and integrated planning will help terminal to face those challenges. This research studied about optimizing an integrated planning of the container terminal in Indonesia, using a bi-objective optimization method to minimize time violation, and also operational cost of terminal. The result of this research is a model with various scenarios which already adjusted with terminal’s real operational condition, so it would be applicable and could be help terminal for increasing their performance. Keywords: Bi-objective optimization, container terminal, mixed-integer programming, tactical level planning
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
Pendahuluan
Pertumbuhan volume pengiriman peti kemas di dunia (UNCTAD, 2010) mendorong
pelabuhan, khususnya terminal peti kemas untuk terus meningkatkan performa dalam
operasionalnya (Karam & Eltawil 2016). Perencanaan operasional yang optimal akan memiliki
dampak langsung pada waktu sandar kapal di pelabuhan (turn-round time) yang merupakan salah
satu indikator performa utama sebuah terminal peti kemas (UNCTAD 2010). Turn-round time
merupakan interval waktu sejak kapal tiba di pelabuhan sampai kapal tersebut meninggalkan
pelabuhan, dimana didalamnya termasuk waktu tunggu (waiting time) dan waktu pengerjaan
bongkar muat peti kemas (handling/service time) (Turrkoguullari et al. 2016). (Elvaretta 2012)
dalam penelitiannya menyimpulkan bahwa turn-round time menjadi faktor yang paling
berpengaruh dalam persaingan antar pelabuhan di kalangan shipping line sebagai salah satu
pengguna jasa terminal peti kemas.
Masing-masing shipping line telah memiliki window untuk mengunjungi tiap-tiap
pelabuhan, biasanya dalam kurun waktu per minggu. Pihak terminal peti kemas perlu membuat
perencanaan yang optimal agar dapat mengakomodasi jadwal milik shipping line. Dalam
praktiknya, PT. Pelabuhan Tanjung Priok sudah memiliki perencanaan dalam hal alokasi sandar
kapal, yaitu berupa BA-Map (Berth Allocation Map).
(Liu et al. 2016) menyebutkan bahwa perencanaan terminal peti kemas yang baik selain
harus dapat menyeimbangkan faktor waktu terkait lamanya waktu pelayanan dan jadwal
shipping line yang harus dipenuhi oleh pihak terminal, dengan biaya operasional yang harus
dikeluarkan terminal untuk biaya transportasi pada lapangan penumpukan, dimana biaya
transportasi tersebut bergantung pada jarak antara lokasi sandar kapal dan lokasi lapangan
penumpukan yang telah ditentukan (Budipriyanto et al. 2015).
Dari praktik yang terjadi pada terminal peti kemas PT. Pelabuhan Tanjung Priok,
perencanaan alokasi sandar kapal hanya dibuat berdasarkan data estimasi turn-round time yang
diinformasikan shipping line dari jadwal yang mereka miliki. Selain itu, perencanaan alokasi
sandar kapal serta alokasi lapangan penumpukan untuk muatan masing-masing kapal masih
dilakukan secara terpisah, sehingga tidak ada proses integrasi diantara keduanya.
Tinjauan Literatur
Sistem Operasional Terminal Peti Kemas
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
Alur aktifitas di terminal peti kemas secara umum dapat dikelompokkan berdasarkan
status peti kemas, yaitu peti kemas ekspor, impor dan transshipment. Peti kemas ekspor yang
masuk dari hinterland (luar terminal) menuju pelabuhan menggunakan kendaraan eksternal (truk
atau kereta) akan disimpan sementara pada area lapangan penumpukan (yard) sebelum akhirnya
dimuat (loading) ke atas kapal yang akan membawanya ke pelabuhan tujuan selanjutnya. Untuk
peti kemas impor berlaku alur sebaliknya, yaitu peti kemas yang telah dibongkar
(unloaded/discharged) dari kapal yang sedang sandar akan disimpan sementara pada lapangan
penumpukan sebelum akhirnya akan diangkut keluar dari area pelabuhan menuju area hinterland
oleh kendaraan eksternal milik pemilik peti kemas. Sementara untuk peti kemas transshipment,
terdapat dua cara yang biasa dilakukan yaitu (i) direct transshipment (transshipment langsung),
dimana peti kemas akan langsung dipindahkan dari satu kapal menuju kapal lainnya yang sedang
sandar di waktu yang sama, tanpa disimpan/ditumpuk di lapangan penumpukan, sedangkan pada
(ii) indirect transshipment, dimana peti kemas akan disimpan sementara pada lapangan
penumpukan sebelum dimuat pada kapal selanjutnya.
Tactical Berth Allocation Planning (TBAP) & Tactical Yard Allocation Planning (TYAP)
Permasalahan utama dalam perencanaan level taktis mencakup perencanaan alokasi
sandar (TBAP) dan alokasi lapangan penumpukan (TYAP). Dalam perencanaan alokasi sandar,
pihak pengelola terminal bertugas untuk merencanakan posisi dan waktu sandar untuk kapal
yang akan sandar di pelabuhan, dimana perencanaan tersebut harus dapat memenuhi interval
waktu sandar yang diinginkan oleh shipping lines. Untuk memperkirakan waktu sandar yang
dibutuhkan, pihak pengelola juga akan merencanakan alokasi QC yang sesuai dengan muatan
kapal bersangkutan.
Sementara dalam perencanaan alokasi lapangan penumpukan, pihak terminal akan
menentukan posisi lapangan penumpukan untuk peti kemas impor dan transshipment yang akan
dibongkar dari kapal yang sandar, maupun peti kemas ekspor dan transshipment yang akan
ditempatkan sementara sebelum dimuat ke masing-masing kapal. Pada perencanaan ini, pihak
terminal akan meminimalkan jarak transportasi pada lapangan penumpukan (Liu et al. 2016).
TBAP dan TYAP saling berkaitan, dimana posisi sandar yang ditentukan dalam TBAP
akan berpengaruh pada posisi lapangan penumpukan dan juga jarak yang akan ditempuh dalam
transportasi peti kemas menuju lapangan penumpukan, dan begitu juga sebaliknya (Liu et al.
2016).
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
Mixed-Integer Programming
Mixed-Integer Programming merupakan bagian dari pemrograman matematika, dimana
permasalahan dalam sebuah sistem diformulasikan kedalam himpunan, parameter, variabel
keputusan, fungsi tujuan dan fungsi kendala. Suatu permasalahan dalam model matematika
disebut permasalahan programa linear saat fungsi tujuan dan fungsi kendala seluruhnya linear.
Termasuk dalam model programa linear dimana seluruh fungsi kendala dibatasi untuk bernilai
integer. Oleh karena itu kadang programa integer disebut juga dengan programa integer linear.
Berkaitan dengan penjelasan tersebut, muncullah definisi mixed-integer programming (MIP),
yang juga merupakan model programa linear dimana tidak seluruh fungsi kendala dibatasi untuk
bernilai integer. Beberapa studi menggunakan istilah “biner” untuk variabel dengan Batasan nilai
0 atau 1.
Solusi yang memenuhi seluruh fungsi kendala disebut solusi yang diterima (feasible
solution). Solusi diterima (feasible solution) yang menghasilkan nilai fungsi tujuan terbaik
disebut solusi optimal (optimal solution). Terkadang bisa saja tidak terdapat solusi yang diterima
pada MIP. MIP yang tidak memiliki solusi disebut infeasible Mixed-Integer Programming. Di
sisi lain, sebuah MIP bisa saja tidak mempunyai solusi optimal karena solusi juga
memungkinkan untuk memulai nilai tak terbatas. Problem MIP seperti itu disebut dengan
unbounded Mixed-Integer Programming (MIP yang tidak memiliki batasan).
Pada umumnya terdapat tiga proses dalam MIP. Proses pertama adalah mendefinisikan
set variabel keputusan yang mewakilkan pilihan-pilihan yang harus dioptimasi dalam sistem.
Langkah kedua adalah membuat pernyataan fungsi kendala, sedangkan langkah ketiga adalah
membuat fungsi tujuan. Langkah kedua dan ketiga tidak masalah bila dilakukan dalam urutan
yang sebaliknya (Smith & Taskin 2008).
Optimasi Bi-Objektif
Optimasi merupakan proses untuk membuat sebuah sistem menjadi lebih baik (Amouzgar
2012). Optimasi adalah menyesuiakan input dari sebuah proses atau sistem, untuk mendapatkan
minimal atau maksimal output (sesuai yang diinginkan). Input tersebut adalah variabel, proses
atau fungsi yang ingin dicapai adalah fungsi objektif, dengan output berupa nilai dari fungsi
tujuan tersebut.
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
Optimasi sebuah sistem yang melibatkan hanya satu fungsi tujuan disebut optimasi
dengan objektif tunggal (single-objective optimization). Namun banyak permasalahan dalam
dunia nyata membutuhkan lebih dari satu fungsi tujuan untuk dioptimasi. Berbagai permasalahan
dalam bidang teknik seringkali memiliki objektif yang saling bertentangan, seperti halnya
memaksimalkan performa dan meminimalkan biaya. Satu solusi tunggal dengan nilai ekstrem
tidak akan mencukupi kedua objektif tersebut, untuk itu dibutuhkan beberapa solusi berbeda
yang akan menghasilkan trade-off antara kedua objektif, sehingga dibutuhkan himpunan
penyelesaian yang merepresentasikan solusi optimal untuk seluruh objektif. Optimasi dengan
lebih dari satu fungsi tujuan tersebut disebut optimasi multi-objektif (multi-objective
optimization)
Metode
Terdapat beberapa tahapan besar dalam penelitian ini, yaitu pengumpulan dari PT.
Pelabuhan Tanjung Priok, pengolahan data mentah untuk menyesuaikan kebutuhan model
dengan membuat QC-profile, penentuan time horizon, serta perhitungan jarak antara dermaga
dan lapangan penumpukan peti kemas. Kemudian dilanjutkan dengan pengembangan model
sesuai kondisi aktual PT. Pelabuhan Tanjung Priok.
Pengembangan Model Matematis
Model optimasi dalam penelitian ini mengadopsi prinsip Mixed-Integer Linear
Programming dalam permasalahan perencanaan terintegrasi terminal peti kemas yang digunakan
oleh (Liu et al. 2016), dengan fungsi tujuan untuk meminimalkan ketidaksesuaian waktu dan
jarak transportasi peti kemas. Model disesuaikan dengan mengikuti kondisi aktual pada PT.
Pelabuhan Tanjung Priok.
Himpunan dan Parameter
!, ! ∈ ! Himpunan kapal, ! ≠ !
! ∈ ! Himpunan seluruh sub-blok pada lapangan penumpukan
(Impor, Ekspor, dan transshipment)
! ∈ ! Himpunan timesteps abstrak
! ∈ ! Himpunan timesteps relatif
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
! ∈ ! Himpunan QC-Profile untuk seluruh kapal
! ∈ ! Himpunan segmen dermaga
! ∈ ! Himpunan sub-blok yang berdampingan pada area lapangan
penumpukan ekspor dan transshipment
KI Himpunan sub-blok Impor
KE Himpunan sub-blok Ekspor
KT Himpunan sub-blok transshipment
s Panjang tiap segmen dermaga, ! = 100 !
L Panjang total dermaga pelabuhan, ! = 1000 !
H Jumlah timestep dalam perencanaan, 27 timesteps
Pi QC-Profile untuk masing-masing kapal
hip Handling time (waktu pelayanan) untuk masing-masing QC-
Profile
f Selisih timestep maksimal yang diizinkan untuk melakukan
direct-transshipment
E Handling time maksimal dari semua kapal
!! , !! Interval waktu turn-round time yang diizinkan
!! , !! Interval estimasi turn-round time
ui Panjang setiap kapal (setelah ditambah dengan jarak aman)
Qt Jumlah QC tersedia dalam setiap timestep
lipm Parameter biner, 1 menyatakan kapal-i, dengan menggunakan
QC-Profile p, sedang dalam aktifitas loading (muat) pada
timestep relatif ke-m, 0 berarti kapal sedang dalam aktifitas
unloading (bongkar)
qipm Jumlah QC yang digunakan oleh kapal i dengan
menggunakana QC-Profile p, pada timestep relatik ke-m
ri Jumlah sub-blok pada lapangan penumpukan impor yang
harus dialokasikan untuk kapal i
re Jumlah sub-blok pada lapangan penumpukan ekspor yang
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
harus dialokasikan untuk kapal i
rt Jumlah sub-blok pada lapangan penumpukan transshipment
yang harus dialokasikan untuk kapal i
Ri Parameter biner, 1 jika ri > 0, 0 jika sebaliknya
Re Parameter biner, 1 jika re > 0, 0 jika sebaliknya
Rt Parameter biner, 1 jika rt > 0, 0 jika sebaliknya
ci Jumlah peti kemas impor pada kapal i
ce Jumlah peti kemas ekspor pada kapal i
ct Jumlah peti kemas transshipment pada kapal i
Aij Parameter bineer, 1 jikan terdapat peti kemas transshipment
dari kapal i ke kapal j, 0 jika sebaliknya
!!"! Jarak unloading (bongkar) dari segmen dermaga b menuju
sub-blok k
!!"! Jarak loading (muat) dari sub-blok k menuju segmen dermaga
b
!!!!!! Jarak loading (muat) dari segmen b1 menuju segmen b2
!!! Bobot earliness per timestep untuk setiap kapal
!!! Bobot tardiness per timestep untuk setiap kapal
M Bilangan integer
Variabel
β i Posisi sandar kapal pada dermaga berdasarkan titik tengah kapal
ωib Variabel biner, bernilai 1 jika titik tengah kapal i sandar pada
segmen b, dan bernilai 0 jika sebaliknya, ! ∈ ! !"# ! ∈ !
!!" Variabel biner, bernilai 1 jika muatan kapal i akan dialokasikan
pada sub-blok k, sebaliknya bernilai 0, ! ∈ ! !!! ! ∈ !
!!"# Variabel biner, bernilai 1 jika sub-blok k dialokasikan untuk
muatan dari kapal i dan kapal sedang dalam proses loading pada
timestep ke-t, sebaliknya bernilai 0, ! ∈ !, ! ∈ ! !"# ! ∈ !
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
!!" Variabel biner, bernilai 1 jika kapal i dilayani menggunakan QC-
profile p, bernilai 0 jika sebaliknya, ! ∈ ! !"# ! ∈ !!
!!"# Variabel biner, bernilai 1 jika kapal i dilayani menggunakan QC-
proflile p dan mulai aktifitas bongkar muat pada timestep ke-t,
sebaliknya bernilai 0, ! ∈ !,! ∈ !! !"# ! ∈ !
!! Variabel integer yang menunjukkan waktu dimulainya aktifitas
bongkar muat untuk kapal i, ! ∈ !
!!" Variabel biner, bernilai 1 jika kapal i mulai aktifitas bongkar muat
pada timestep ke-t, ! ∈ ! !"# ! ∈ !
!! Variabel integer, menunjukkan waktu akhir pelayanan untuk kapal
i, ! ∈ !
!!"! Variabel biner, bernilai 1 jika kapal i sandar pada sisi kiri kapal j
di sepanjang sisi dermaga (sepanjang sumbu-x pada grafik time-
space), bernilai 0 jika sebaliknya, !, ! ∈ !, ! ≠ !
!!"! Variabel biner, bernilai 1 jika kapal i selesai proses bongkar muat
sebelum kapal j mulai dilayani (sepanjang sumbu-y pada grafik
time-space), bernilai 0 jika sebaliknya, !, ! ∈ !, ! ≠ !
!!" Variabel biner, bernilai 1 jika kapal i sedang dalam aktifitas
loading pada timestep ke-t, ! ∈ ! !"# ! ∈ !
!!" Variabel biner, bernilai 1 jika kapal i menempati segmen b, 0 jika
sebaliknya, ! ∈ ! !"# ! ∈ !
ob Waktu mulai aktifitas segmen b, ! ∈ !
db Waktu selesai aktifitas segmen b, ! ∈ !
!! Jumlah QC yang digunakan pada tiap timestep, ! ∈ !
!!"! Variabel biner, bernilai 1 jika diterapkan direct-transshipment dari
kapal i ke kapal j, 0 jika sebaliknya, !, ! ∈ !, ! ≠ !
!!"! Variabel biner, bernilai 1 jika diterapkan indirect-transshipment
dari kapal i ke kapal j, 0 jika sebaliknya, !, ! ∈ !, ! ≠ !
!!! Jarak tempuh rata-rata aktifitas unloading peti kemas impor, ! ∈ !
!!! Jarak tempuh rata-rata aktifitas loading peti kemas ekspor, ! ∈ !
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
!!"!" Jarak tempuh rata-rata pada aktifitas unloading peti kemas
transshipment, !, ! ∈ !, ! ≠ !
!!!" Jarak tempuh rata-rata pada aktifitas loading peti kemas
transshipment, ! ∈ !
!!"! Jarak tempuh rata-rata antar kapal i menuju kapal j pada aktifitas
pemindahan peti kemas transshipment, !, ! ∈ !, ! ≠ !
!!! Selisih waktu mulai penangan kapal dengan waktu kedatangan
kapal, ! ∈ !
!!! Selisih waktu selesai penangan kapal dengan waktu estimasi
keberangkatan kapal, ! ∈ !
!!"#$ Variabel biner, bernilai 1 jika !!" = 1 dan !!" = 1, 0 jika
sebaliknya, !, ! ∈ !, ! ≠ !, ! ∈ !! , ! ∈ !
!!"# Variabel biner, bernilai 1 jika 1 jika !!" = 1 dan !!" = 1, 0 jika
sebaliknya, ! ∈ !, ! ≠ !, ! ∈ !!∪!∪! , ! ∈ !
!!"!!"! Variabel biner, bernilai 1 jika !!"! = 1 dan !!"! = 1, 0 jika
sebaliknya, !, ! ∈ !, ! ≠ !, !1, !2 ∈ !, !1 ≠ !2
!!"! Variabel biner, bernilai 1 jika segmen b berada pada sisi kiri kapal
i (pada sumbu-x grafik time-space)
Fungsi Tujuan
OBJ1 : !"# (!!!!!!!∈!
+ !!!!!!) (1)
OBJ2 : !"# !!!!!!!∈!
+ !!!!!!!∈!
+ !!!!∈!,!!!
!!!!∈!
(2)
Fungsi tujuan 1 adalah meminimalkan selisih waktu kedatangan dan keberangkatan
seluruh kapal (ketidaksesuaian turn-round time), sedangkan fungsi tujuan 2 adalah
meminimalkan total jarak transportasi peti kemas dari lapangan menuju dermaga maupun
sebaliknya.
Fungsi Kendala
1) Memastikan muatan masing-masing kapal mendapatkan alokasi tempat pada
lapangan penumpukan.
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
!!" ≤ 2,!∈!
! ∈ !! (3)
!!" ≤ 2,!∈!
! ∈ !! (4)
!!" ≤ 2,!∈!
! ∈ !! (5)
2) Memastikan jumlah alokasi lapangan penumpukan sesuai dengan jumlah muatan
peti kemas impor dan ekspor masing-masing kapal.
!!" = !!! ,!∈!!
! ∈ !(6)
!!" = !!! ,!∈!!
! ∈ !(7)
3) Memilih mode transshipment, jika terdapat muatan peti kemas transshipment
pada kapal
!!"! + !!"! = !!"! , !, ! ∈ !, ! ≠ !(8)
4) Memastikan jumlah alokasi lapangan penumpukan untuk peti kemas
transshipment sesuai dengan jumlah muatan transshipment, jika diterapkan mode
indirect-transshipment
!!" ≥ !!! − (1− !!"! )!∈!,!!!
!, ! ∈ ! (9)!∈!!
!!" ≥ !!! + (1− !!"! )!∈!,!!!
!, ! ∈ ! (10)!∈!!
5) Memastikan masing-masing kapal dilayani menggunakan satu QC-profile.
!!" = 1, ! ∈ ! (11)!∈!!
6) Mamastikan setiap kapal mulai aktifitas bongkar muat pada satu timestep.
!!" = 1, ! ∈ ! (12)!∈!
7) Mendefinisikan variabel waktu dimulainya aktifitas bongkar muat masing-masing
kapal.
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
!! = ! ∙ !!" , ! ∈ ! (13)!∈!
8) Menghubungkan variable waktu mulai dan selesai aktifitas bongkar muat masing-
masing kapal.
!! + !!" ∙ ℎ!" − 1 = !! , ! ∈ ! (14)!∈!!
9) Memastikan waktu mulai dan selesai aktifitas bongkar muat sesuai dengan waktu
yang tersedia untuk masing-masing kapal.
!! ≤ !!! , ! ∈ ! (15)
!! ≥ !!! , ! ∈ ! (16)
10) Menentukan earliness dan tardiness untuk masing-masing kapal.
!!! ≥ !!! − !! , ! ∈ ! (17)
!!! ≥ !! − !!! , ! ∈ ! (18)
11) Memastikan titik tengah msing-masing kapal dialokasikan tepat pada 1 segmen
dermaga.
!!" = 1, ! ∈ ! (19)!∈!
12) Memastikan posisi sandar tiap kapal masuk dalam jangkauan jarak masing-
masing segmen.
! ! − 1 ∙ !!" ≤ !! ,!∈!
! ∈ !(20)
!! ≤ ! ! ∙ !!" − 1,!∈!
! ∈ !(21)
13) Memastikan posisi sandar 2 kapal tidak saling bertabrakan.
!! + !! 2 ≤ !! − !! 2+ 1− !!"! !, !, ! ∈ !, ! ≠ ! (22)
14) Memastikan waktu pelayanan setiap kapal tidak bertabrakan.
!! ≤ !! + 1− !!"! !, !, ! ∈ !, ! ≠ ! (23)
15) Menentukan posisi msing-masing kapal pada grafik time-space.
!!"! + !!"! + !!"! + !!"
! ≥ 1, !, ! ∈ !, ! ≠ ! (24)
16) Memastikan posisi sandar kapal paling kanan tidak melebihi panjang total
dermaga.
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
!! + !! 2 ≤ !, ! ∈ ! (25)
17) Menghubungkan QC-profile dan waktu mulai pelayanan untuk masing-masing
kapal.
!!"# ≥ !!" + !!" − 1, ! ∈ !,! ∈ !! , ! ∈ ! (27)
18) Memastikan jumlah QC yang digunakan pada tiap timestep tidak melebihi jumlah
QC yang tersedia.
!! = !!,!,!!!!! ∙ !!"! ! ∈ ! (28)!
!!!"# (!,!!!!"!!)!∈!!!∈!
19) Memastikan jumlah QC yang bekerja pada extended planning horizon.
!! + !!!! ≤ !! , ! ∈ 1,… . . ,! (29)
!! ≤ !! , ! ∈ ! + 1,… . . ,! (30)
20) Menentukan waktu aktifitas loading untuk masing-masing kapal.
!!!!!! ≥ !!"# ∙ !!"#, ! ∈ !,! ∈ !! ,! ∈ 1,… , ℎ!" , ! ∈ ! (31)
21) Menghubungkan aktifitas loading pada kapal dan lapangan penumpukan ekspor.
!!"# ≥ !!" + !!" − 1, ! ∈ !, ! ∈ !! , ! ∈ ! (32)
22) Menghubungkan aktifitas loading pada kapal dan lapangan penumpukan
trasnshipment, jika diterapkan mode indirext-transshipment.
!!"# ≥ !!" + !!" + !!"!!∈!,!!!
− 2, ! ∈ !, ! ∈ !! , ! ∈ ! (32)
23) Memastikan hanya terdapat satu sub-blok sedang dalam aktifitas loading pada
setiap timestep, untuk setiap sub-blok berdampingan pada blok ekspor.
!!"# +!"#
!!,!,!!! , ! ∈ 1,… ,! ,! ∈ ! (33)!"#!"#!"#
!!"# ≤ 1, ! ∈ ! + 1,…… ,! ,! ∈ ! (34)!"#!"#
24) Memastikan hanya terdapat 1 sub-blok sedang dalam aktifitas loading pada tiap
timestep, pada masing-masing blok ekspor.
!!"# +!"#
!!,!,!!! , ! ∈ 1,… ,! ,! ∈ ! (35)!"#!"#!"#
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017

!!"# ≤ 1, ! ∈ ! + 1,…… ,! ,! ∈ ! (36)!"#!"#
25) Menghitung jarak unloading rata-rata peti kemas impor.
!!! ≤ !!! ∙!, ! ∈ ! (37)
!!! ≤!!"# ∙ !!"!!∈!!∈!!
!!! − 1+ !!!, ! ∈ ! (38)
26) Menghitung jarak loading rata-rata peti kemas Ekspor.
!!! ≤ !!! ∙!, ! ∈ ! (37)
!!! ≤!!"# ∙ !!"!!∈!!∈!!
!!! − 1+ !!!, ! ∈ ! (38)
27) Menghitung jarak unloading rata-rata peti kemas impor.
!!"!" ≤ !!! ∙!, ! ∈ !, ! ≠ ! (39)
!!"!" ≤!!"# ∙ !!"!!∈!!∈!!
!!! − 1+ !!!, ! ∈ !, ! ≠ ! (40)
28) Menghubungkan posisi sandar kapal dengan sub-blok transshipment.
!!"#$ ≥ !!" ∙ !!" − 1, !, ! ∈ !, ! ≠ !, ! ∈ !! , ! ∈ ! (41)
29) Jarak loading rata-rata peti kemas transshipment.
!!!" ≤ !!! ∙!, ! ∈ ! (42)
!!!" ≤!!"# ∙ !!"!!∈!!∈!!
!!! − 1+ !!!, ! ∈ ! (43)
30) Menghubungkan posisi sandar dengan lapangan penumpukan untuk masing-
masing kapal.
!!"# ≥ !!" + !!" − 1, ! ∈ !, ! ∈ !, ! ∈ ! (44)
31) Jarak tempuh rata-rata peti kemas transshipment jika menggunakan indirect-
transshipment.
!!"! ≥ !!"!" + !!"!" − 1− !!"! !, !, ! ∈ !, ! ≠ ! (45)
32) Jarak tempuh rata-rata peti kemas transshipment jika menggunakan direct-
transshipment.
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
!!"! ≥ !!"! +!!"! ∙ !!!!!! − 1− !!"! !,
!, ! ∈ !, !1, !2 ∈ !, ! ≠ !, !1 ≠ !2 (46)
33) Menghubungkan posisi sandar 2 kapal.
!!"! ≥ !!"! + !!"! − 1,
!, ! ∈ !, !1, !2 ∈ !, ! ≠ !, !1 ≠ !2 (47)
34) Kendala siklus kedatangan periodik.
!! ≤ ! ∙ ! − 1+ !!"! !, ! ∈ !, ! ∈ ! (48)
!! ≥ ! ∙ ! − 1− !!"! !, ! ∈ !, ! ∈ ! (49)
!! + !! ≥ ! ∙ ! − 1 − !!"!!, ! ∈ !, ! ∈ ! 50
!! + !! ≤ ! ∙ ! − 1 − 1+ (1− !!"! )!, ! ∈ !, ! ∈ ! (51)
!!" ≥ 1− !!"! − !!"!!, ! ∈ !, ! ∈ ! (52)
35) Menghitung waktu mulai hingga selesai kapal menempati segmen b, dan durasi
sibuk setiap segmen sandar.
!! ≤ !! + 1− !!" !, ! ∈ !, ! ∈ ! 53
!! ≥ !! − 1− !!" !, ! ∈ !, ! ∈ ! 54
!! − !! + 1 ≤ !, ! ∈ !, ! ∈ ! 55
36) Batasan pada indirect-transshipment.
!! ≥ !! − 1− !!"! !, !, ! ∈ ! 56
!! ≤ !! + ! − 1+ 1− !!"! !, !, ! ∈ !, ! ≠ ! 57
!!" ≥ !!"! ∙ 2− !!"! − !!"! !, !, ! ∈ !, ! ≠ ! (56)
37) Membatasi seluruh variabel non negatif.
!! , !! ,!! , !!! , !!! , !! ,!! ,!! ! ℤ!, ! ∈ !, ! ∈ !, ! ∈ !
!!! , !!! , !!"!" , !!"!" , !!"! ! ℤ! !, ! ∈ !, ! ≠ !
!!" ,!!" , !!"# , !!" ! {0, 1} ! ∈ !, ! ∈ !, ! ∈ !, ! ∈ !
!!", !!"# ,!!" ,!!" ! {0,1} ! ∈ !,! ∈ !! , ! ∈ !
!!"! , !!"! , !!"! , !!"! ! 0,1 !, ! ∈ !, ! ≠ !
!!"#$ ! 0,1 !, ! ∈ !, ! ≠ !, ! ∈ !! , ! ∈ !
!!"# ! 0,1 !, ! ∈ !, ! ≠ !, ! ∈ !, ! ∈ !
!!"!!"! ! 0,1 !, ! ∈ !, ! ≠ !, !1, !2 ∈ !, !1 ≠ !2
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
!!"! ,!!"! , !!"! , !!"! ! 0,1 !, ! ∈ !, ! ≠ !, ! ∈ !
Hasil Simulasi Model
Keluaran dari penelitian ini adalah berupa berth allocation map dan peta alokasi lapangan
penumpukan yang telah terintegrasi, dari hasil optimasi bi-objektif. Berikut adalah hasil simulasi
yang didapatkan.
Hasil Simulasi Masing-Masing Fungsi Tujuan
Fungsi tujuan 1 model optimasi penelitian ini yaitu meminimalkan selisih waktu
kedatangan dan keberangkatan aktual dari jadwal milik shpping line. Model dijalankan dengan
hanya meminimalkan fungsi tujuan 1. Berth allocation map keluaran model seperti pada gambar
1.
Gambar 1 Berth allocation Map/Time Space Graph Model Optimasi 1
Dari gambar tersebut terlihat bahwa seluruh kapal yang dijadwalkan dapat diakomodasi
oleh terminal, baik dari sisi kebutuhan dermaga maupun waktu pelayanan. Untuk nilai optimal
model dengan meminimalkan fungsi tujuan 1 didapatkan ketidaksesuaian waktu aktual dengan
jadwal sebesar 2 timesteps. Untuk alokasi lapangan penumpukan, seluruh muatan sudah
0 1 2 3 4 5 6 7 8 9
10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
0 100 200 300 400 500 600 700 800 900
Tim
este
ps
Kapal A Kapal B Kapal C Kapal D Kapal E Kapal F Kapal G Kapal H Kapal I
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
teralokasikan ke seluruh lapangan penumpukan yang tersedia, namun masih terdapat satu sub-
blok yang tidak digunakan pada lapangan penumpukan.
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
Gambar 2 Peta alokasi lapangan penumpukan untuk masing-masing muatan kapal hasil keluaran model
dengan fungsi tujuan 1
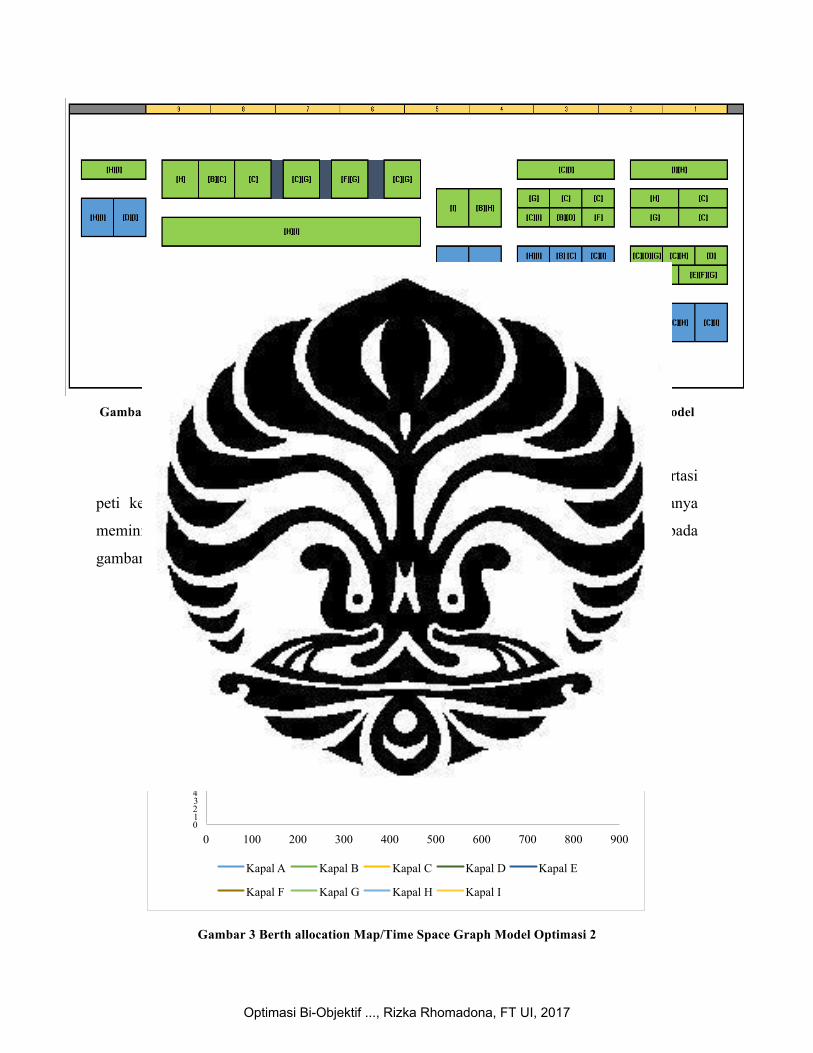
Fungsi tujuan 2 model optimasi penelitian ini yaitu meminimalkan jarak transportasi
peti kemas antara dermaga danlapangan penumpukan. Model dijalankan dengan hanya
meminimalkan fungsi tujuan 2. Berth allocation map keluaran model ditunjukkan pada
gambar 3, dan peta alokasi lapangan penumpukan model 2 pada gambar 4.
Gambar 3 Berth allocation Map/Time Space Graph Model Optimasi 2
0 1 2 3 4 5 6 7 8 9
10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
0 100 200 300 400 500 600 700 800 900
Tim
este
ps
Kapal A Kapal B Kapal C Kapal D Kapal E
Kapal F Kapal G Kapal H Kapal I
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
Gambar 4 Peta alokasi lapangan penumpukan untuk masing-masing muatan kapal hasil keluaran model
dengan fungsi tujuan 2
Dari gambar 3 dan 4 juga terlihat bahwa seluruh kapal yang dijadwalkan dapat diakomodasi
oleh terminal, baik dari sisi kebutuhan dermaga maupun waktu pelayanan. Untuk nilai optimal model
dengan meminimalkan fungsi tujuan 2 didapatkan jarak total trasnportasi peti kemas yaitu 2,777,451
meter. Untuk alokasi lapangan penumpukan, seluruh muatan sudah teralokasikan ke seluruh lapangan
penumpukan yang tersedia, dan seluruh sub-blok telah terutilisasi.
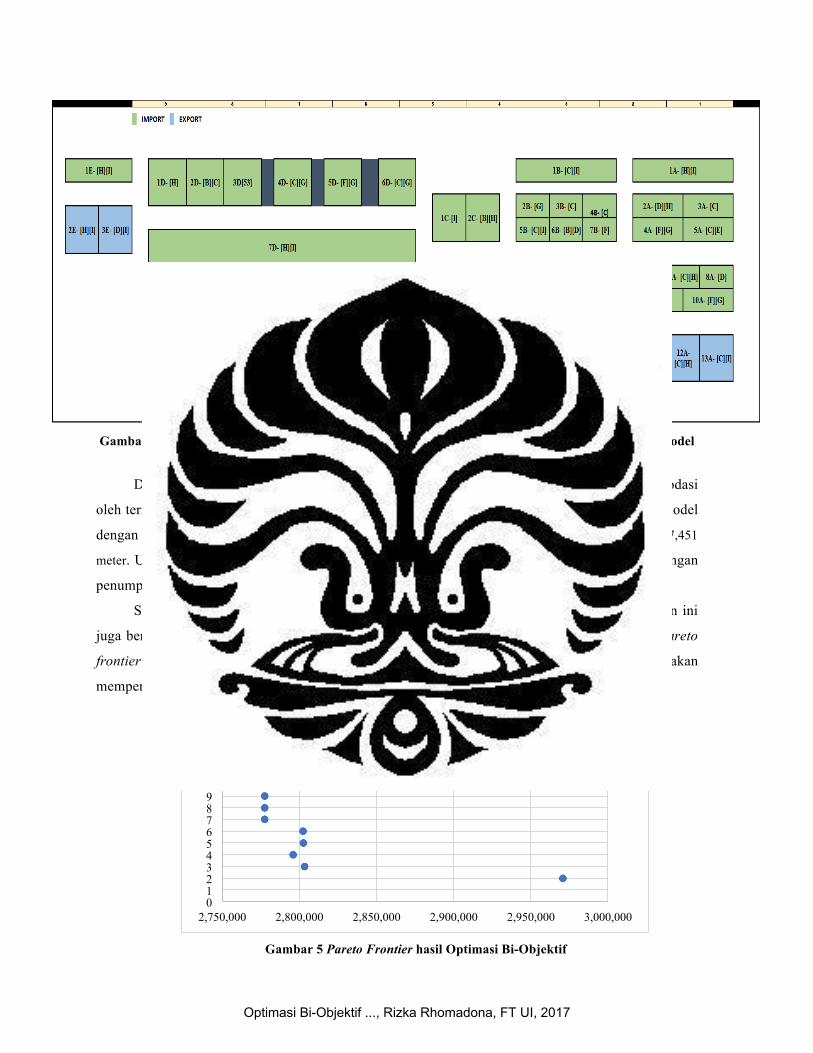
Selain berth allocation map dan peta alokasi lapangan penumpukan, output dari penelitian ini
juga berupa pareto frontier yang menggambarkan hubungan antara kedua fungsi tujuan. Dari pareto
frontier pada gambar 5 terlihat bahwa semakin tinggi selisih/ketidaksesuaian waktu yang terjadi akan
memperkecil jarak transportasi peti kemas.
Gambar 5 Pareto Frontier hasil Optimasi Bi-Objektif
0 1 2 3 4 5 6 7 8 9
10 11
2,750,000 2,800,000 2,850,000 2,900,000 2,950,000 3,000,000
Distance VS Violation Time Jarak Transportasi VS Selisih Waktu
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
Kesimpulan
Dari hasil yang didapatkan setelah melakukan penelitian ini, dapat disimpulkan bahwa
proses optimasi bi-objektif dapat diterapkan pada perencanaan terintegrasi terminal peti
kemas internasional PT. Pelabuhan Tanjung Priok. Dari hasil tersebut didapatkan pula
hubungan antara kedua fungsi tujuan dalam model yaitu meminimalkan ketidaksesuaian
waktu serta meminimalkan jarak transportasi peti kemas, dimana keduanya didapatkan
memiliki hubungan berbanding terbalik untuk batasan nilai tertentu. Semakin tinggi
ketidaksesuaian waktu yang terjadi, maka jarak transportasi peti kemas pada dermaga dan
lapangan penumpukan akan semakin kecil.
Dari keluaran model pada penelitian ini juga dapat disimpulkan bahwa fasilitas yang
ada pada terminal peti kemas PT. Pelabuhan Tanjung Priok mencukupi kebutuhan (demand)
yang ada. Berth allocation map dan peta alokasi lapangan penumpukan yang didapatkan dari
penelitian ini dapat dijadikan salah satu skenario operasional alternatif untuk diterapkan
langsung pada terminal peti kemas PT. Pelabuhan Tanjung Priok karena asumsi yang
digunakan saat pembuatan model sudah sesuai dengan kondisi aktual terminal.
Penelitian selanjutnya terkait penerapan optimasi bi-ojektif pada perencanaan
terintegrasi terminal peti kemas dapat dikembangkan dengan menambahkan faktor
ketidakpastian pada kedatangan kapal atau dengan mengembangkan model eksak untuk
terminal peti kemas dengan intensitas kesibukan yang lebih tinggi (throughput lebih banyak).
Referensi
Amouzgar, K., 2012. Multi-objective optimization using Genetic Algorithms. , 0(vx), pp.1–
24.
Bierwirth, C. & Meisel, F., 2015. A follow-up survey of berth allocation and quay crane
scheduling problems in container terminals. European Journal of Operational Research,
244(3), pp.675–689. Available at: http://dx.doi.org/10.1016/j.ejor.2014.12.030.
Budipriyanto, A., Wirjodirdjo, B. & Gurning, S., 2015. Berth Allocation Problem Under
Uncertainty: A Conceptual Model using Collaborative Approach. Procedia
Manufacturing, 4(Iess), pp.429–437.
Caramia, M. & Dell’Olmo, P., 2008. Multi-objective Management in Freight Logistics. In
Evolutionary computation: advanced algorithms and operators. London: Springer-
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017
Verlag London, pp. 25–37.
Carlo, H.J., Vis, I.F.A. & Roodbergen, K.J., 2014. Storage yard operations in container
terminals: Literature overview, trends, and research directions. European Journal of
Operational Research, 235(2), pp.412–430.
Elvaretta, 2012. Analisis Persaingan Pelabuhan Peti Kemas Berdasarkan Perspektif
Pengguna.
Giallombardo, G. et al., 2010. Modeling and solving the Tactical Berth Allocation Problem.
Transportation Research Part B: Methodological, 44(2), pp.232–245. Available at:
http://dx.doi.org/10.1016/j.trb.2009.07.003.
Karam, A. & Eltawil, A.B., 2016. Functional integration approach for the berth allocation,
quay crane assignment and specific quay crane assignment problems. Computers and
Industrial Engineering, 102, pp.458–466. Available at:
http://dx.doi.org/10.1016/j.cie.2016.04.006.
Kim, K.H. & Lee, H., 2015. Container Terminal Operation : Current Trends and Future
Challenges,
Kim, Y., 2010. Book Review. The Asian Journal of Shipping and Logistics, 26(2), pp.341–
344. Available at: http://linkinghub.elsevier.com/retrieve/pii/S2092521210800082.
Liu, M. et al., 2016. Bi-objective optimization for the container terminal integrated planning.
Transportation Research Part B: Methodological, 93, pp.720–749.
Moorthy, R. & Teo, C.P., 2007. Berth management in container terminal: The template
design problem. Container Terminals and Cargo Systems: Design, Operations
Management, and Logistics Control Issues, pp.63–86.
Smith, J. & Taskin, Z., 2008. A Tutorial Guide to Mixed Integer Programming Models and
Solution Techniques. Optimization in Medicine and Biology, pp.1–23. Available at:
http://www.ie.boun.edu.tr/~taskin/pdf/IP_tutorial.pdf.
Turrkoguullari, Y.B. et al., 2016. Optimal berth allocation, time-variant quay crane
assignment and scheduling with crane setups in container terminals. European Journal
of Operational Research, 254(3), pp.985–1001.
UNCTAD, 2010. Port Performance Indicator.
UNCTAD, 2016. Review of Maritime Transport.
Optimasi Bi-Objektif ..., Rizka Rhomadona, FT UI, 2017