optimization — introductionsc4091/download/osc_slides_opt_intro.pdf · optimization deals with...
TRANSCRIPT
Optimization — Introduction
Optimization — Introduction 1 / 33
Optimization deals with how to do things in the best possible manner:
Design of multi-criteria controllers
Clustering in fuzzy modeling
Trajectory planning of robots
Scheduling in process industry
Estimation of system parameters
Simulation of continuous time systems on digital computers
Design of predictive controllers with input-saturation
Related courses:
SC4060: Predictive and adaptive control
SC4040: Filtering & identification
EE4530 Applied Convex Optimization
WI4207 Continuous Optimization
WI4219 Discrete Optimization
Optimization — Introduction 2 / 33
Overview
Three subproblems:
Formulation:Translation of engineering demands and requirements into amathematically well-defined optimization problem
Initialization:Choice of right algorithmChoice of initial values for parameters
Optimization procedure;Various optimization techniquesVarious computer platforms
Optimization — Introduction 3 / 33
Teaching goals
I. Optimization problem → most efficient and best suited optimizationalgorithm
II. Engineering problem → optimization problem:◮ specifications → mathematical formulation◮ simplifications/approximations?◮ efficiency◮ implementation
Optimization — Introduction 4 / 33
Contents
Part I: Optimization techniques
Part II: Formulating the controller design problem as an optimizationproblem
Optimization — Introduction 5 / 33
Contents of Part I
I. Optimization Techniques1 Introduction2 Linear Programming3 Quadratic Programming4 Nonlinear Optimization5 Constraints in Nonlinear Optimization6 Convex Optimization7 Global Optimization8 Summary9 Matlab Optimization Toolbox10 Multi-Objective Optimization11 Integer Optimization
Optimization — Introduction 6 / 33
Mathematical framework
minx
f (x)
s.t. h(x) = 0
g(x) 6 0
f : objective function
x : parameter vector
h(x) = 0 : equality constraints
g(x) 6 0 : inequality constraints
f (x) is a scalarg(x) and h(x) may be vectors
Optimization — Introduction 7 / 33
Unconstrained optimization:
f (x∗) = minx
f (x)
wherex∗ = argmin
xf (x)
Constrained optimization:
f (x∗) = minx
f (x)
h(x∗) = 0
g(x∗) 6 0
wherex∗ = arg
{
minx
f (x), h(x) = 0, g(x) 6 0}
Optimization — Introduction 8 / 33
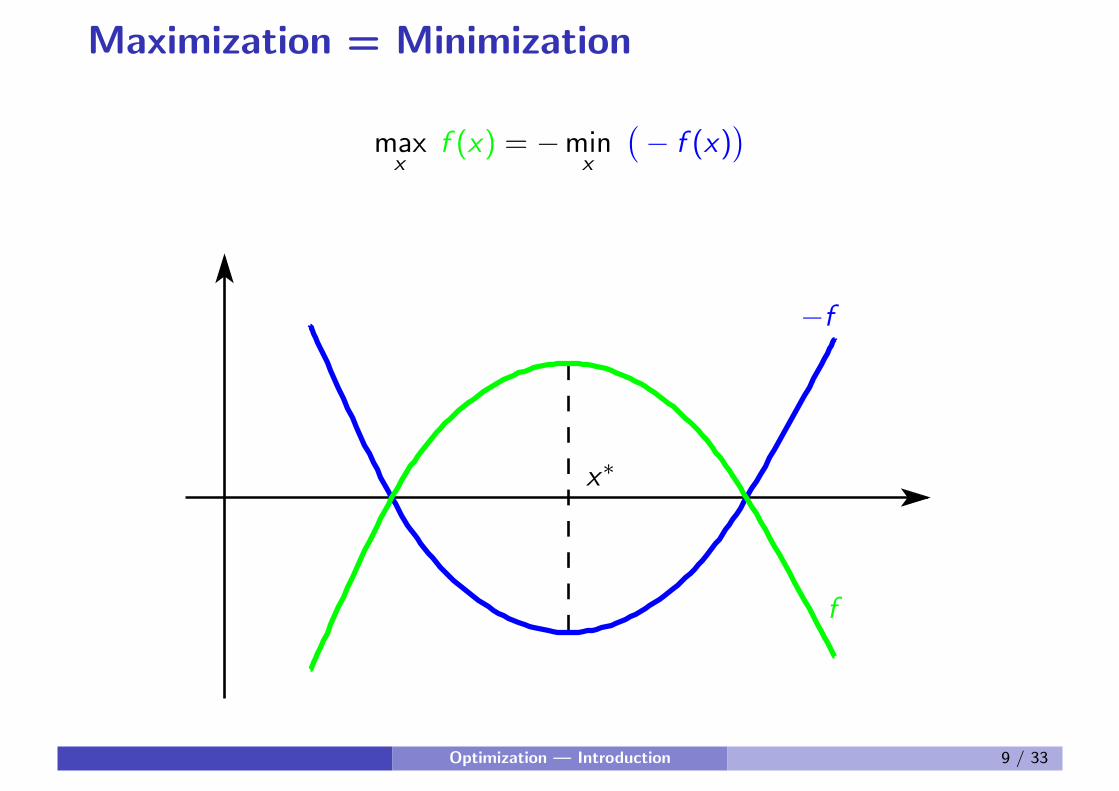
Maximization = Minimization
maxx
f (x) = −minx
(
− f (x))
f
−f
x∗
Optimization — Introduction 9 / 33
Classes of optimization problems
Linear programming
minx
cT x , Ax = b , x > 0
minx
cT x , Ax 6 b , x > 0
Quadratic programming
minx
12 x
THx + cT x , Ax = b , x > 0
minx
12 x
THx + cT x , Ax 6 b , x > 0
Convex optimization
minx
f (x) , g(x) 6 0 where f and g are convex
Nonlinear optimization
minx
f (x) , h(x) = 0 , g(x) 6 0
where f , h, and g are non-convex and nonlinear
Optimization — Introduction 10 / 33
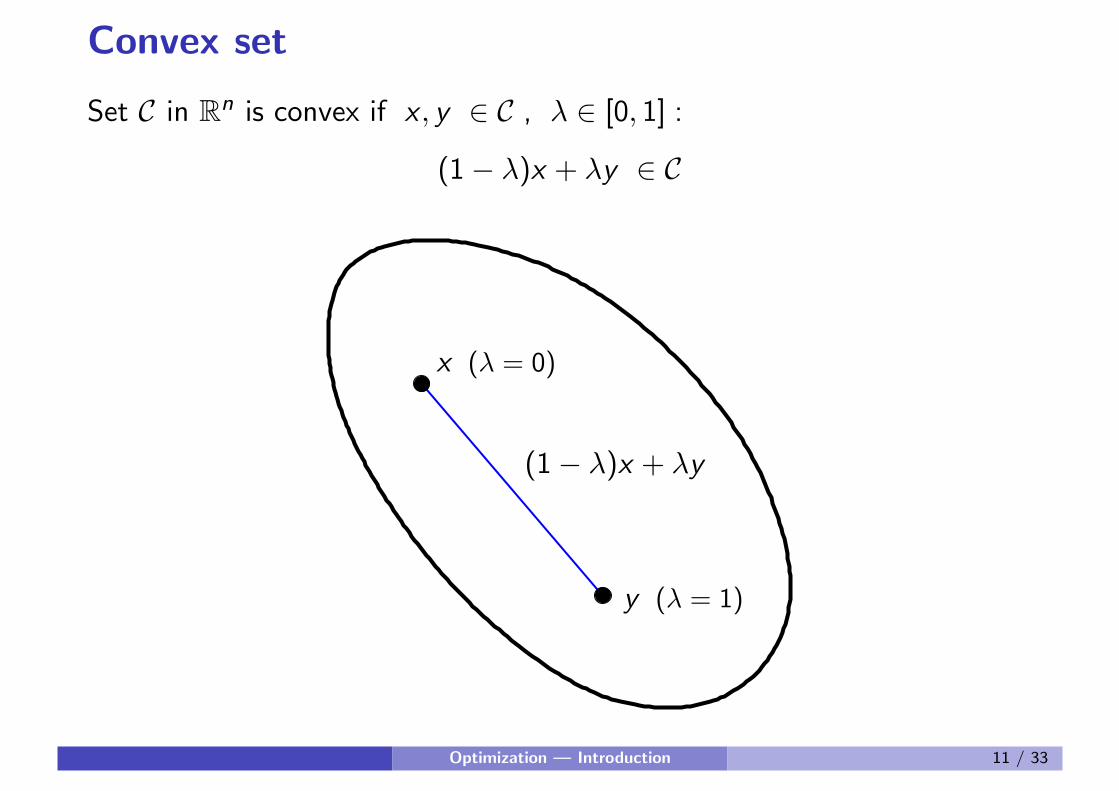
Convex set
Set C in Rn is convex if x , y ∈ C , λ ∈ [0, 1] :
(1− λ)x + λy ∈ C
x (λ = 0)
y (λ = 1)
(1− λ)x + λy
Optimization — Introduction 11 / 33
Unimodal function
A function f is unimodal if
a) The domain dom(f ) is a convex set.
b) ∃ x∗ ∈ dom(f ) such
f (x∗) 6 f (x) ∀ x ∈ dom(f )
c) For all x0 ∈ dom(f )
there is a trajectory x(λ) ∈ dom(f )
with x(0) = x0 and x(1) = x∗
such thatf(
x(λ))
6 f (x0) ∀λ ∈ [0, 1]
Optimization — Introduction 12 / 33
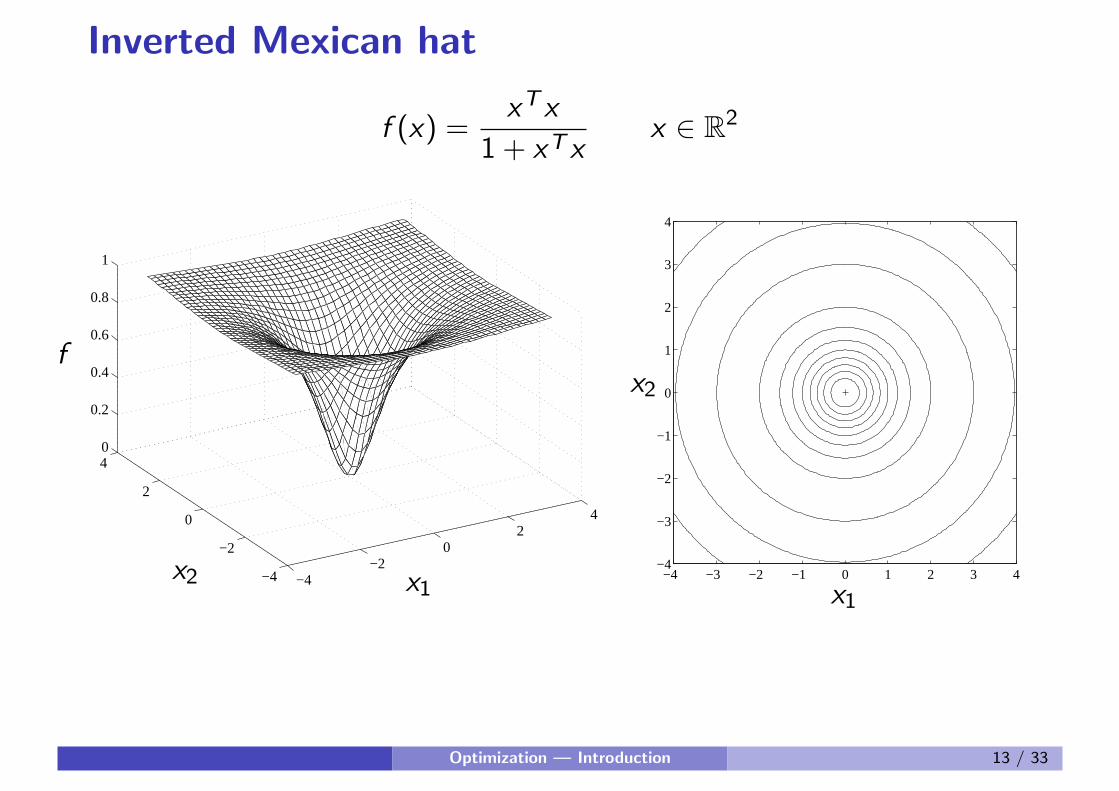
Inverted Mexican hat
f (x) =xT x
1 + xT xx ∈ R
2
−4−2
02
4
−4
−2
0
2
40
0.2
0.4
0.6
0.8
1
x1x2
f
−4 −3 −2 −1 0 1 2 3 4−4
−3
−2
−1
0
1
2
3
4
x1
x2
Optimization — Introduction 13 / 33

Rosenbrock function
f (x1, x2) = 100(x2 − x21 )2 + (1− x1)
2
−2−1
01
2
−1
0
1
2
30
500
1000
1500
2000
2500
3000
x1x2
f
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−1
−0.5
0
0.5
1
1.5
2
2.5
3
x1
x2
Optimization — Introduction 14 / 33
Quasiconvex function
A function f is quasiconvex if
a) Domain dom(f ) is a convex set
b) For all x , y ∈ dom(f )
and 0 6 λ 6 1
there holds
f(
(1− λ)x + λy)
6 max (f (x), f (y))
Optimization — Introduction 15 / 33
Quasiconvex function
Alternative definition:
A function f is quasiconvex if the sublevel set
L(α) = { x ∈ dom(f ) : f (x) 6 α }
is convex for every real number α
Optimization — Introduction 16 / 33
Convex function
A function f is convex if
a) Domain dom(f ) is a convex set.
b) For all x , y ∈ dom(f )
and 0 6 λ 6 1
there holds
f(
(1− λ)x + λy)
6 (1− λ)f (x) + λf (y)
Optimization — Introduction 17 / 33
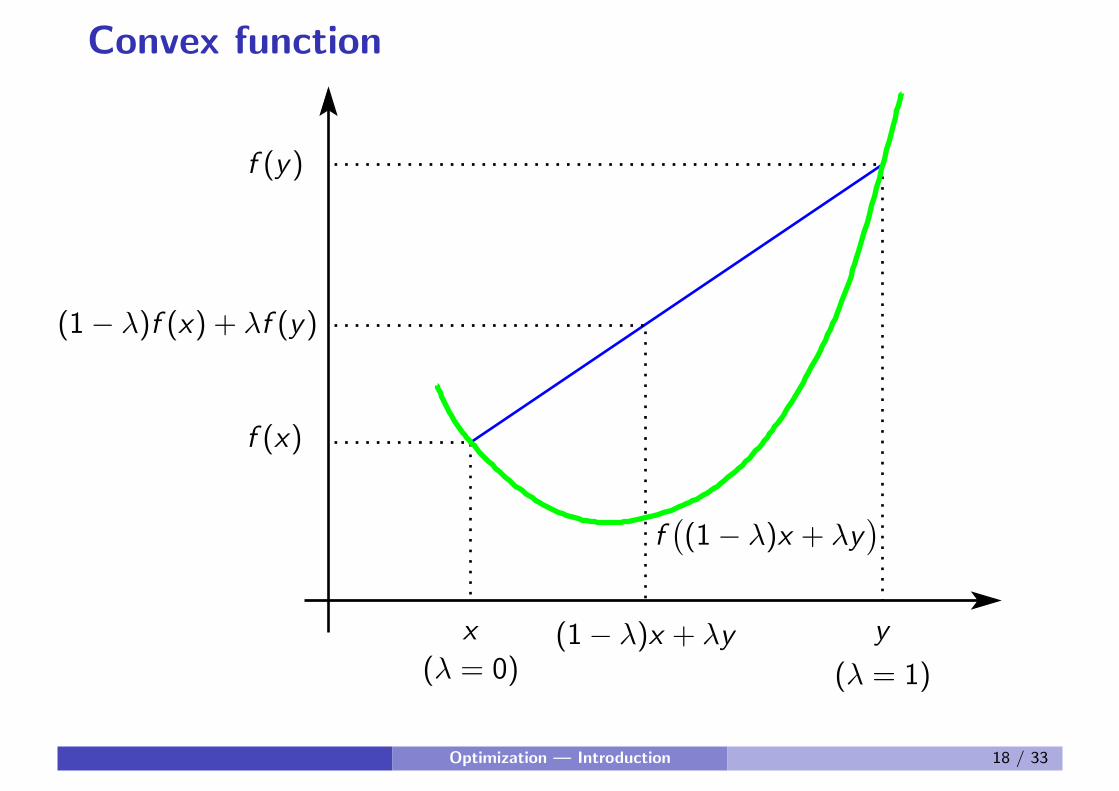
Convex function
x
(λ = 0)
y
(λ = 1)
(1− λ)x + λy
f(
(1− λ)x + λy)
(1− λ)f (x) + λf (y)
f (x)
f (y)
Optimization — Introduction 18 / 33
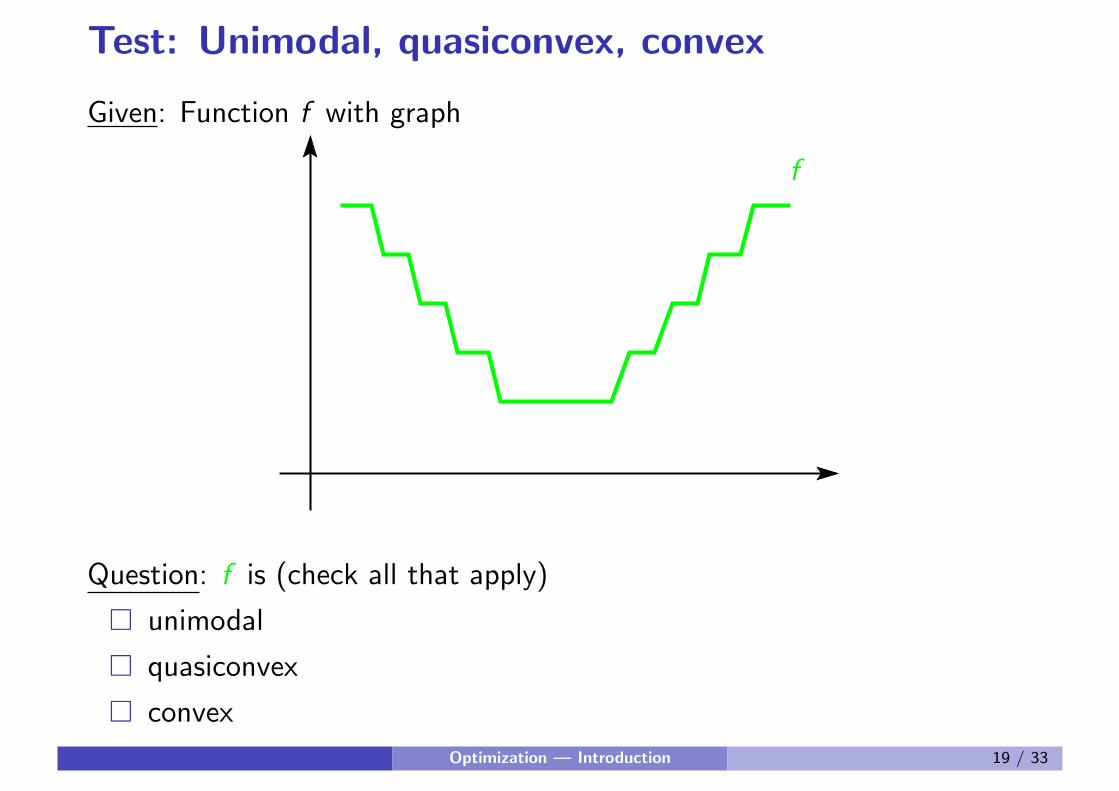
Test: Unimodal, quasiconvex, convex
Given: Function f with graph
f
Question: f is (check all that apply)
� unimodal
� quasiconvex
� convex
Optimization — Introduction 19 / 33
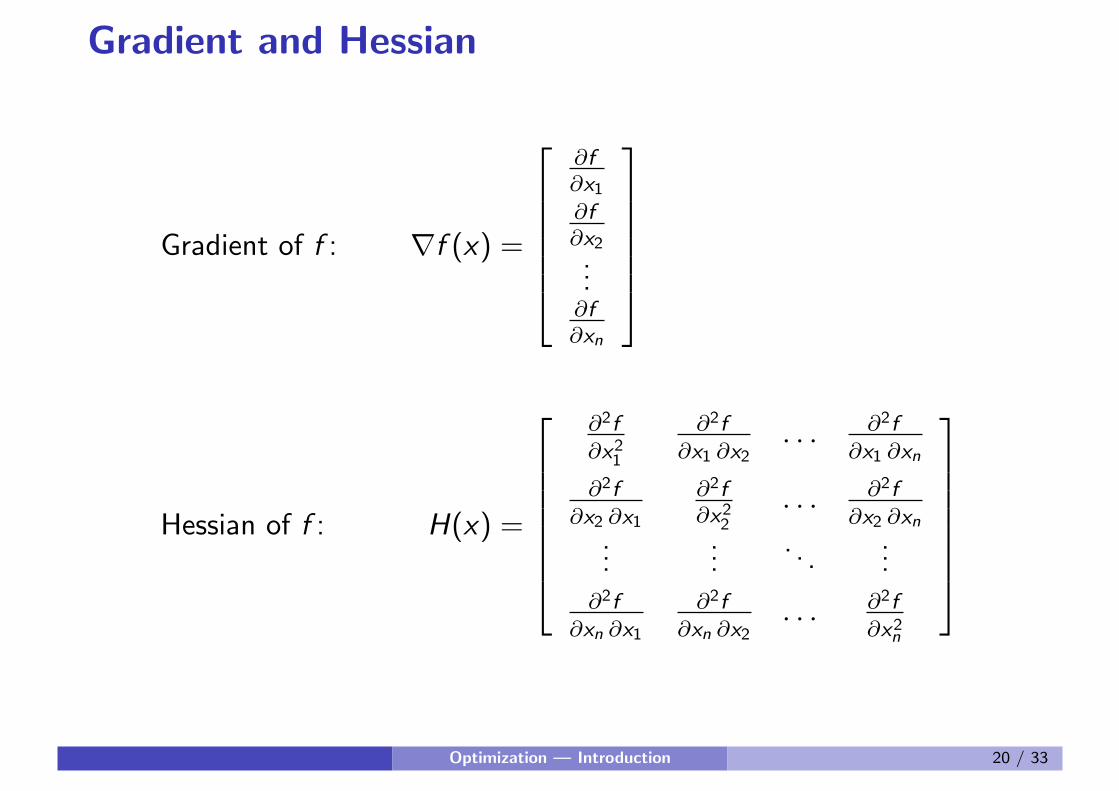
Gradient and Hessian
Gradient of f : ∇f (x) =
∂f
∂x1∂f
∂x2...∂f
∂xn
Hessian of f : H(x) =
∂2f
∂x21
∂2f
∂x1 ∂x2. . . ∂2f
∂x1 ∂xn
∂2f
∂x2 ∂x1
∂2f
∂x22. . . ∂2f
∂x2 ∂xn...
.... . .
...∂2f
∂xn ∂x1
∂2f
∂xn ∂x2. . . ∂2f
∂x2n
Optimization — Introduction 20 / 33
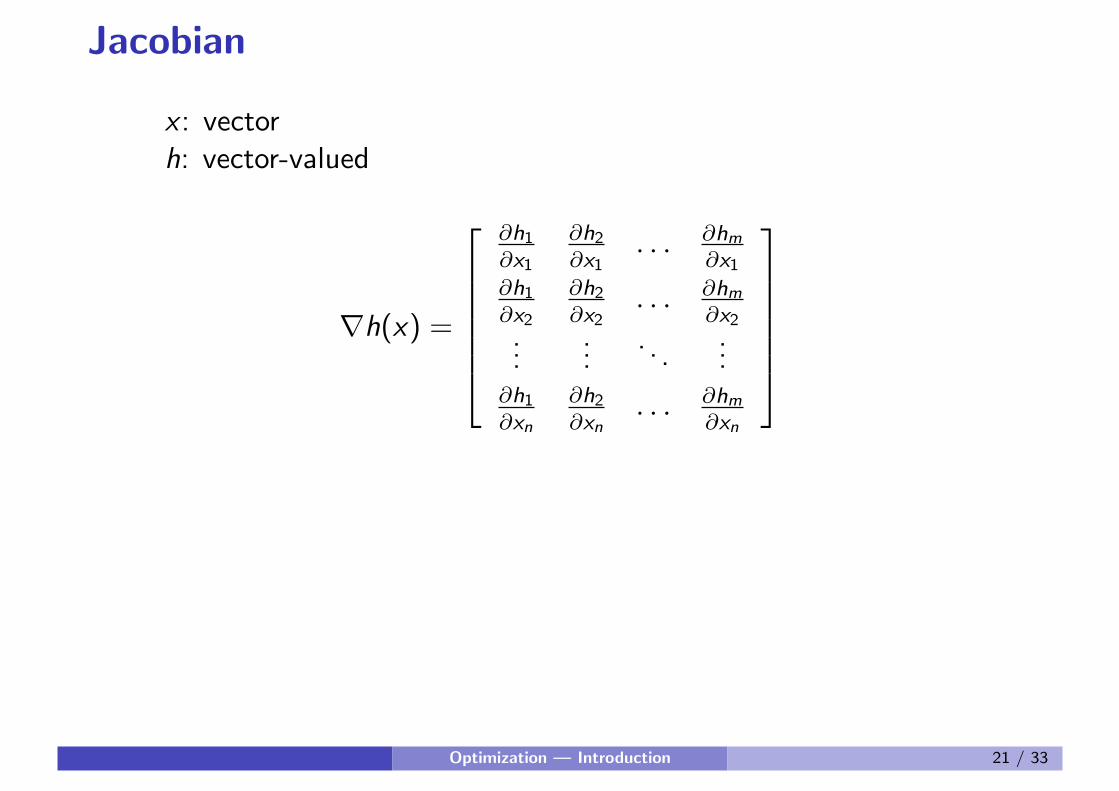
Jacobian
x : vectorh: vector-valued
∇h(x) =
∂h1∂x1
∂h2∂x1
. . . ∂hm∂x1
∂h1∂x2
∂h2∂x2
. . . ∂hm∂x2
......
. . ....
∂h1∂xn
∂h2∂xn
. . . ∂hm∂xn
Optimization — Introduction 21 / 33
Graphical interpretation of gradient
Directional derivative of function f in x0 in direction of unit vector β:
Dβf (x0) = ∇T f (x0) · β = ‖∇f (x0)‖2 cos θ
with θ angle between ∇f (x0) and β
Dβf (x0) is maximal if ∇f (x0) and β are parallel
→ function values exhibit largest increase in direction of ∇f (x0)
→ function values exhibit largest decrease in direction of −∇f (x0)
−∇f (x0) is called steepest descent direction
Dβf (x0) is equal to 0 (i.e., function values f do not change) if∇f (x0) ⊥ β
→ ∇f (x0) is perpendicular to contour line through x0
Optimization — Introduction 22 / 33
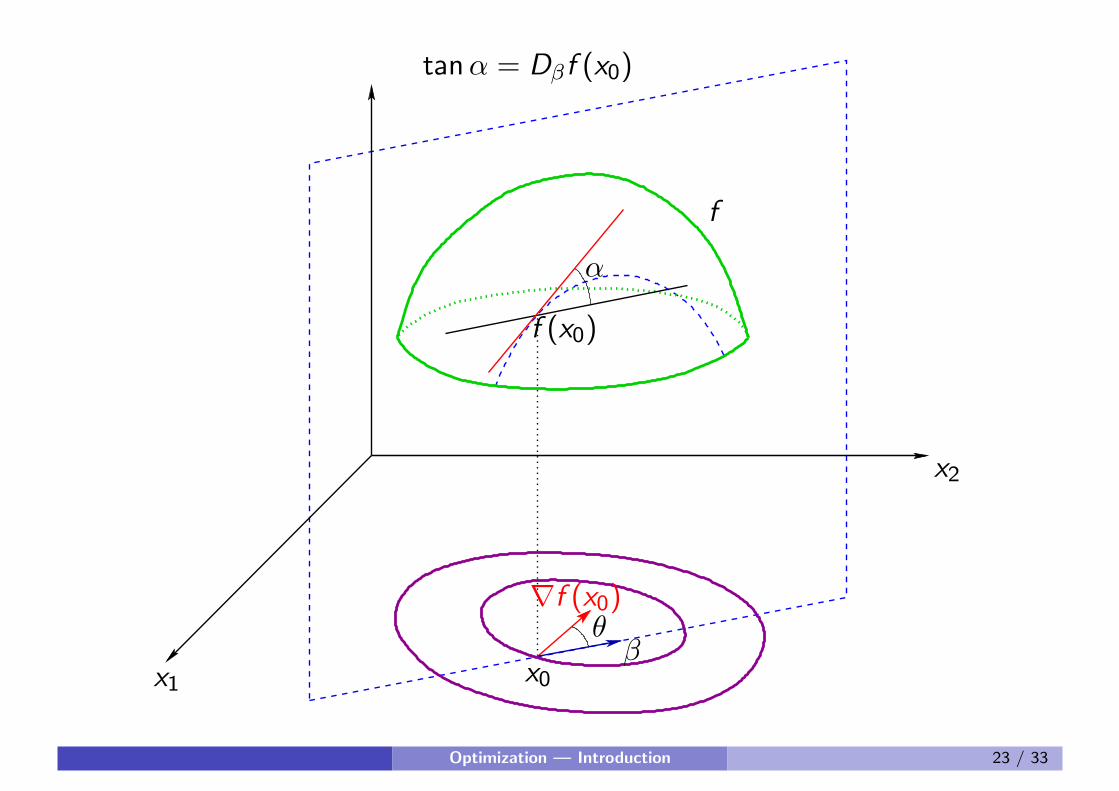
f
α
βθ
x0
f (x0)
x1
x2
∇f (x0)
tanα = Dβf (x0)
Optimization — Introduction 23 / 33
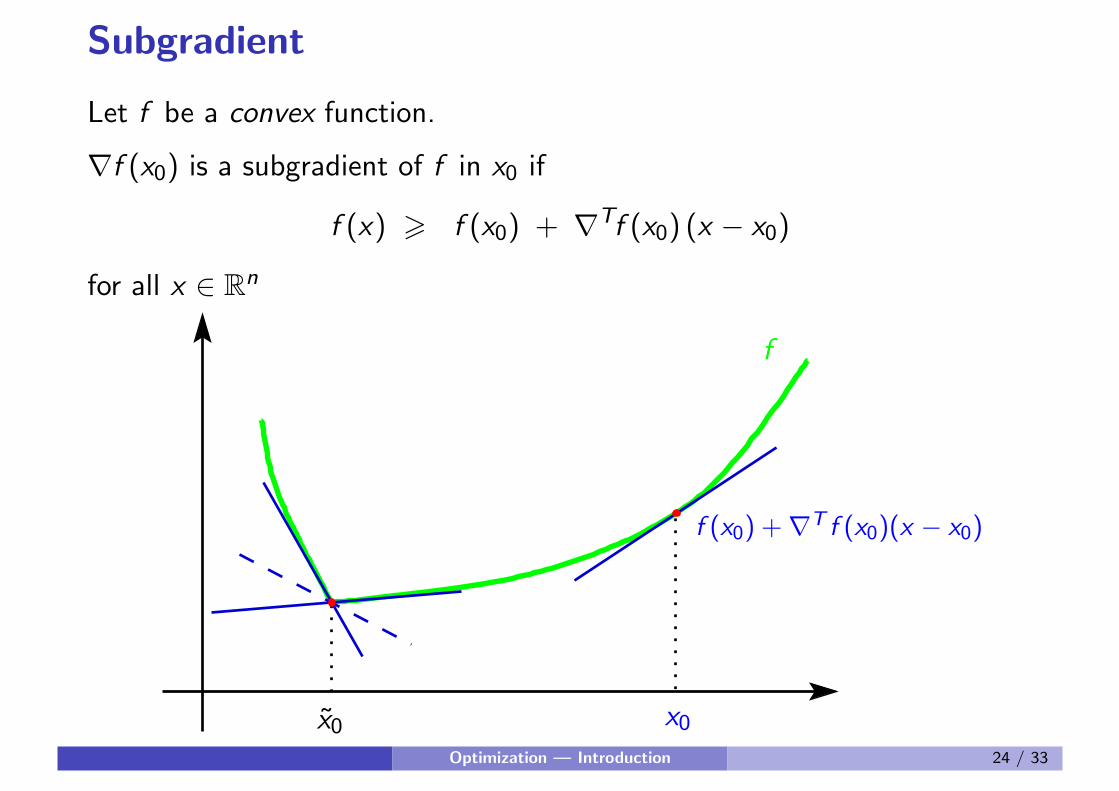
Subgradient
Let f be a convex function.
∇f (x0) is a subgradient of f in x0 if
f (x) > f (x0) + ∇Tf (x0) (x − x0)
for all x ∈ Rn
f
f (x0) +∇T f (x0)(x − x0)
x0x̃0Optimization — Introduction 24 / 33
Positive definite matrices
Let A ∈ Rn×n be symmetric
A is positive definite (A > 0) if xTAx > 0 for all x ∈ Rn \ {0}
A is positive semi-definite (A > 0) if xTAx > 0 for all x ∈ Rn
Property
A > 0 if all its leading principal minors are positive or if all itseigenvalues are positive
A > 0 if all its principal minors are nonnegative or if all its eigenvaluesare nonnegative
Note:
principal minor: submatrix AJJ consisting of rows and columns in J
leading principal minor: submatrix AJJ with J = {1, 2, . . . , k}, k 6 n
Optimization — Introduction 25 / 33
Classes of optimization problems
Linear programming
minx
cT x , Ax = b , x > 0
minx
cT x , Ax 6 b , x > 0
Quadratic programming
minx
12x
THx + cT x , Ax = b , x > 0
minx
12x
THx + cT x , Ax 6 b , x > 0
Convex optimization
minx
f (x) , g(x) 6 0 where f and g are convex
Nonlinear optimization
minx
f (x) , h(x) = 0 , g(x) 6 0
where f , h, and g are non-convex and nonlinear
Optimization — Introduction 26 / 33
Necessary conditions for extremum → learn byheart!
Unconstrained optimization problem: minx
f (x)
Zero-gradient condition: ∇f (x) = 0
Equality constrained optimization problem: minx
f (x)
s.t. h(x) = 0Lagrange conditions:
∇f (x) +∇h(x)λ = 0
h(x) = 0
Inequality constrained optimization problem: minx
f (x)
s.t. g(x) 6 0
h(x) = 0
Karush-Kuhn-Tucker conditions:
∇f (x) +∇g(x)µ+∇h(x)λ = 0
µT g(x) = 0
µ > 0
h(x) = 0
g(x) 6 0Optimization — Introduction 27 / 33
Necessary and sufficient conditions for extremum
Unconstrained optimization problem: minx
f (x)
∇f (x) = 0 and H(x) > 0 → local minimum
∇f (x) = 0 and H(x) < 0 → local maximum
∇f (x) = 0 and H(x) indefinite → saddle point
Convex optimization problem: minx
f (x)
s.t. g(x) 6 0Karush-Kuhn-Tucker conditions are necessary and sufficientfor global optimum
Optimization — Introduction 28 / 33
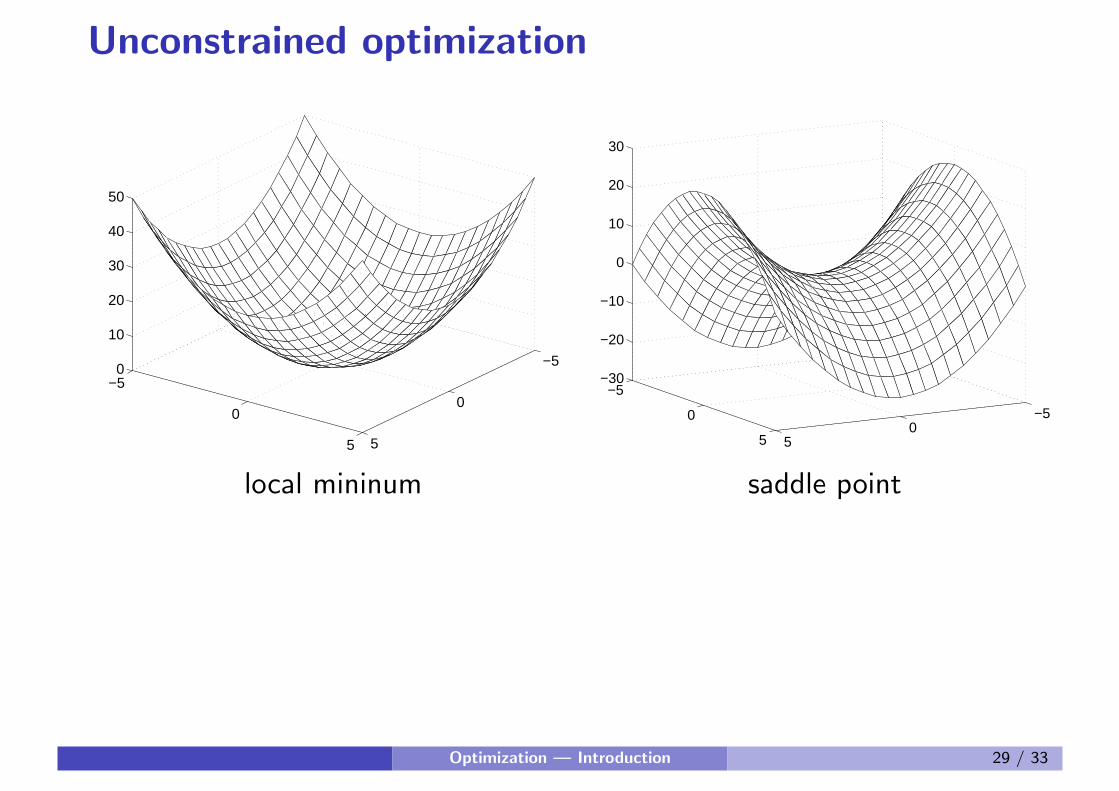
Unconstrained optimization
−5
0
5
−5
0
5
0
10
20
30
40
50
−50
5
−5
0
5
−30
−20
−10
0
10
20
30
local mininum saddle point
Optimization — Introduction 29 / 33
Convergence
β1 = limk→∞
‖ xk+1 − x∗ ‖2‖ xk − x∗ ‖2
Linear convergent if 0 < β1 < 1
Super-linear convergent if β1 = 0
β2 = limk→∞
‖ xk+1 − x∗ ‖2‖ xk − x∗ ‖22
Quadratic convergent if 0 < β2 < 1
Optimization — Introduction 30 / 33
Stopping criteria
Linear and Quadratic programming: Finite number of steps
Convex optimization: |f (xk)− f (x∗)| 6 εf , g(xk) 6 εg , and forellipsoid: ‖xk − x∗‖2 6 εx
Unconstrained nonlinear optimization: ‖∇f (xk)‖2 6 ε∇
Constrained nonlinear optimization:
‖ ∇f (xk) +∇g(xk)µ+∇h(xk)λ ‖2 6 εKT1
| µT g(xk) | 6 εKT2
µ > −εKT3
‖ h(xk) ‖2 6 εKT4
g(xk) 6 εKT5
Maximum number of steps
Heuristic stopping criteria (last resort):‖xk+1 − xk‖2 6 εx or |f (xk)− f (xk+1)| 6 εf
Optimization — Introduction 31 / 33
Summary
Standard form of optimization problem:minx
f (x) s.t. h(x) = 0, g(x) 6 0
Classes of optimization problems: linear, quadratic, convex, nonlinear
Convex sets & functions
Gradient, subgradient, and Hessian
Conditions for extremum
Stopping criteria
Optimization — Introduction 32 / 33
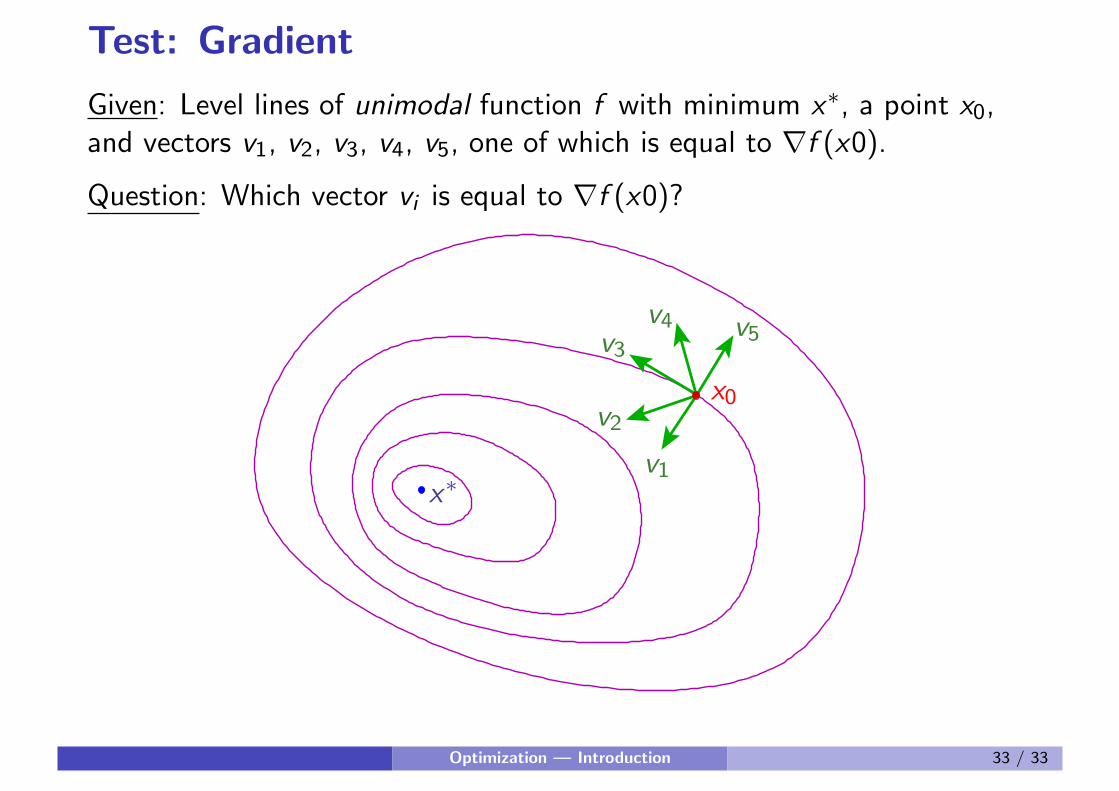
Test: Gradient
Given: Level lines of unimodal function f with minimum x∗, a point x0,and vectors v1, v2, v3, v4, v5, one of which is equal to ∇f (x0).
Question: Which vector vi is equal to ∇f (x0)?
x∗
x0
v1
v2
v3v4 v5
Optimization — Introduction 33 / 33