parallel checkpointing - sathish vadhiyar. introduction checkpointing? storing application’s...
TRANSCRIPT
Parallel Checkpointing
- Sathish Vadhiyar
Introduction
Checkpointing? storing application’s state in
order to resume later
Motivation The largest parallel systems in the world
have from 130,000 to 213,000 parallel processing elements. (http://www.top500.org)
Large-scale applications, that can use these large number of processes, are continuously being built.
These applications are also long-running As the number of processing elements,
increase the Mean Time Between Failure (MTBF) decreases
So, how can long-running applications execute in this highly failure-prone environment? – checkpointing and fault-tolerance
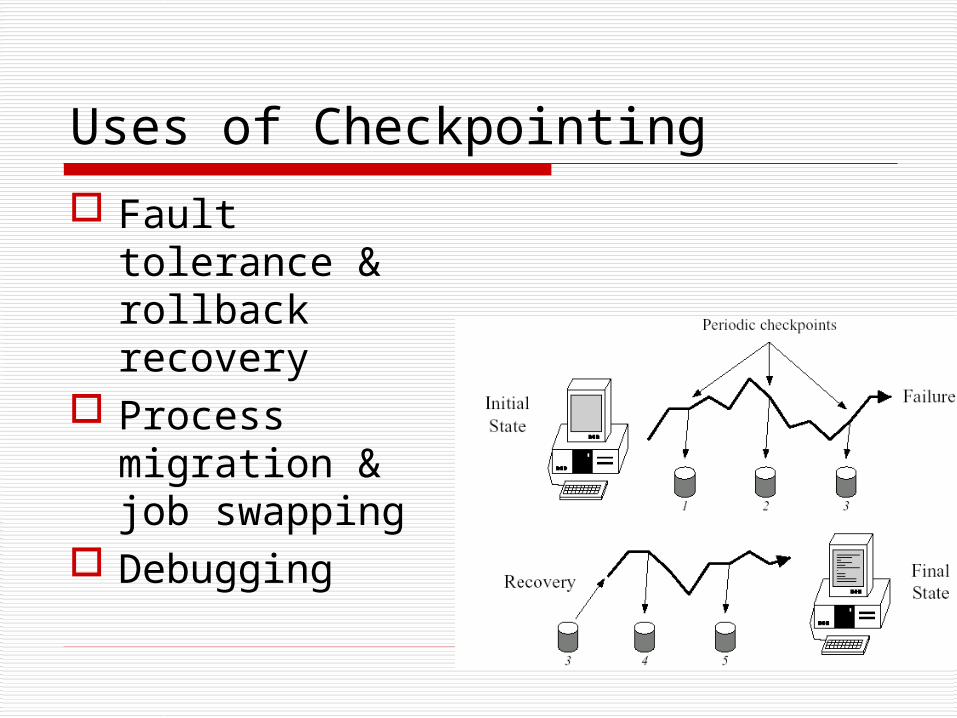
Uses of Checkpointing
Fault tolerance & rollback recovery
Process migration & job swapping
Debugging
Types of Checkpointing OS-level
Process preemption E.g. Berkeley’s checkpointing Linux
User-level Transparent Checkpointing performed by the program itself Transparency achieved by linking application
with a special library e.g. Plank’s libckpt
User-level non-transparent Users insert checkpointing calls in their
programs e.g. SRS (Vadhiyar)
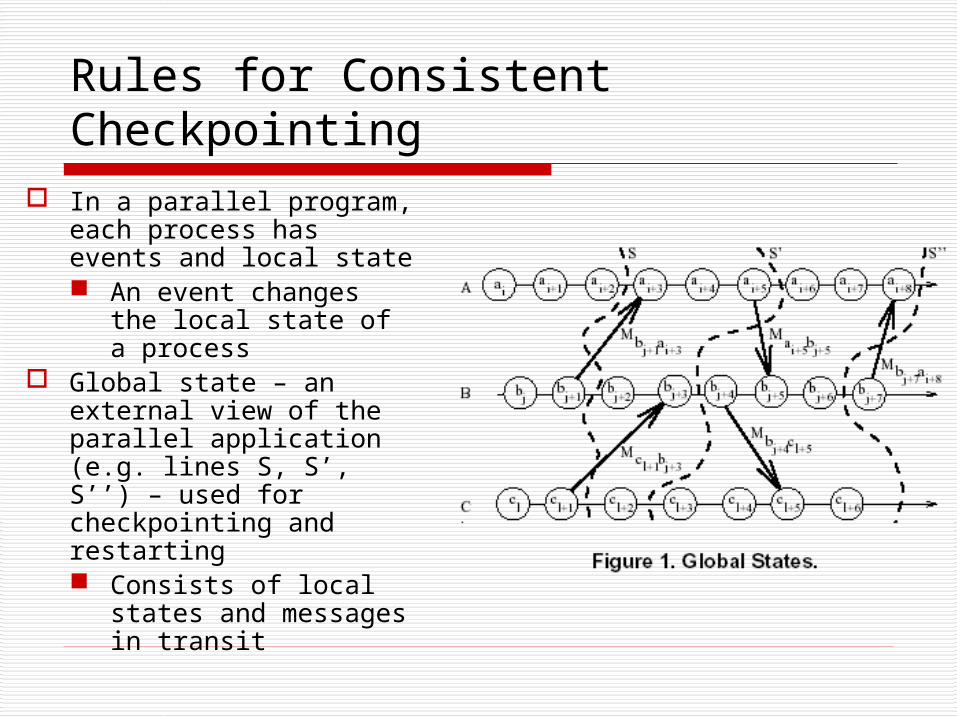
Rules for Consistent Checkpointing In a parallel program,
each process has events and local state An event changes
the local state of a process
Global state – an external view of the parallel application (e.g. lines S, S’, S’’) – used for checkpointing and restarting Consists of local
states and messages in transit
Rules for Consistent Checkpointing
Types of global states Consistent global state – from
where program can be restarted correctly
Inconsistent - Otherwise
Rules for Consistent Checkpointing
Chandy & Lamport – 2 rules for consistent global states 1. if a receive event is part of local state of a process,
the corresponding send event must be part of the local state of the sender.
2. if a send event is part of the local state of a process and the matching receive is not part of the local state of the receiver, then the message must be part of the state of the network.
S’’ violates rule 1. Hence cannot lead to consistent global state
Independent checkpointing
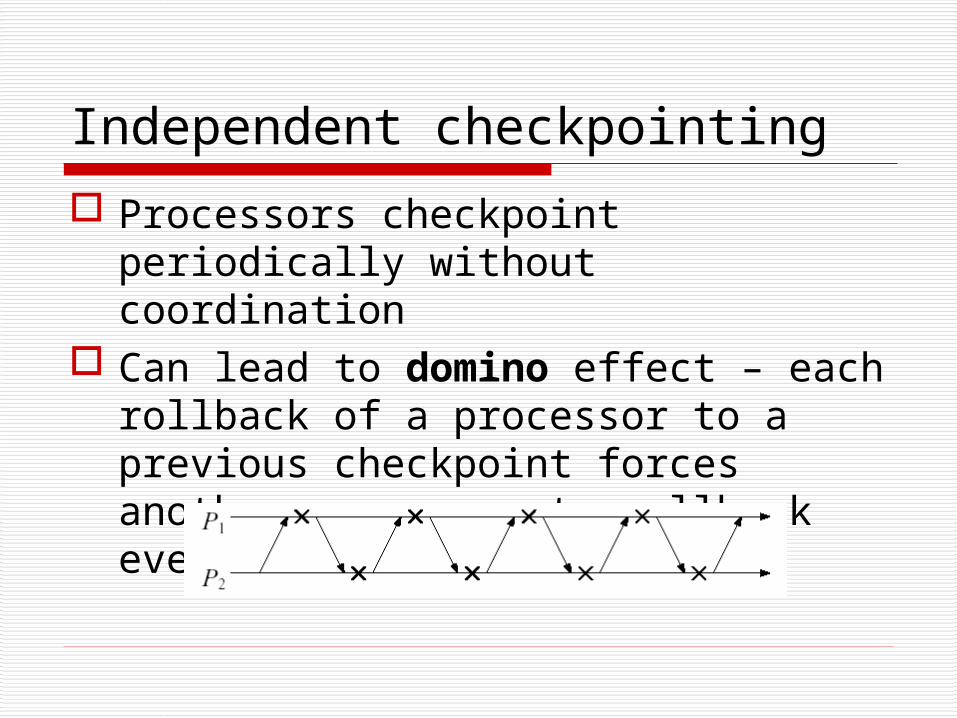
Processors checkpoint periodically without coordination
Can lead to domino effect – each rollback of a processor to a previous checkpoint forces another processor to rollback even further
Checkpointing Methods
1. Coordinated checkpointing
1. All processes coordinate to take a consistent checkpoint (e.g. using a barrier)
2. Will always lead to consistent checkpoints
2. Checkpointing with message logging
1. Independent checkpoints are taken by processes and a process logs the messages it receives after the last checkpoint
2. Thus recovery is by previous checkpoint and the logged messages.
Message Logging
Introduction In message-logging protocols, each process
stores message contents and sequence number
of all messages it has sent or received into a message log
To trim message logs, a process can also periodically checkpoint
Once a process checkpoints, all messages sent/received before this checkpoint can be removed from log
Pessimistic and Optimistic Message Logging
Pessimistic – A sender does not send a message m until it knows all messages sent before m are logged Waits for logging to complete; hence
overhead in communications during no failures
But failure recovery is fast on the occurrence of a failure
Pessimistic and Optimistic Message Logging
Optimistic – assumes messages are logged Does not wait for logs to complete to send a
message, m Hence on failure, the earlier logged messages
will be sent; message m will not be sent – leads to inconsistent states
Hence failure recovery is complex – need to trace back and carefully reconstruct application states
But minimal overhead when no failures
Message Logging – Sender or Receiver Based Can be sender or receiver based Receiver based (e.g. MPICH-V) – message logs
stored at the receiver side Each process has an associated channel
memory (CM) called home CM When P1 wants to send messages to P2, it
contacts P2’s home CM and sends message to it.
P2 retrieves message from its home CM. During checkpoint, the process state is stored
to a checkpoint server (CS) When P2 crashes, during restart, P2 retrieves
checkpoints from CS and messages from CM.
Sender-based (e.g. MPICH-V2) Sender based logging to avoid channel
memories When p sends message m to q, p logs m. m is associated with an id When q receives m, it stores (id, l) where l
is the logical clock. When q crashes and restarts from a
checkpoint state, retrieves (id, l) sets from storage and asks other processes to resend from the sets.
Coordinated Checkpointing
Coordinated Checkpointing
During checkpointing, all processes coordinate by means of a barrier and then checkpoint the respective data
This way, all are consistent checkpoints; messages are cleared at the time of checkpoints;
During recovery, all processes rollback to the respective consistent state (coordinated)
No need to replay messages
Coordinated Checkpointing
Example: Start Restart System (SRS) A user-level non-transparent checkpointing
library User inserts checkpointing calls specifying
data to be checkpointed Advantage: Small amount of checkpointed
data Disadvantage: User burden Allows reconfiguration of applications. Reconfiguration of number of processors and /
or data distribution.
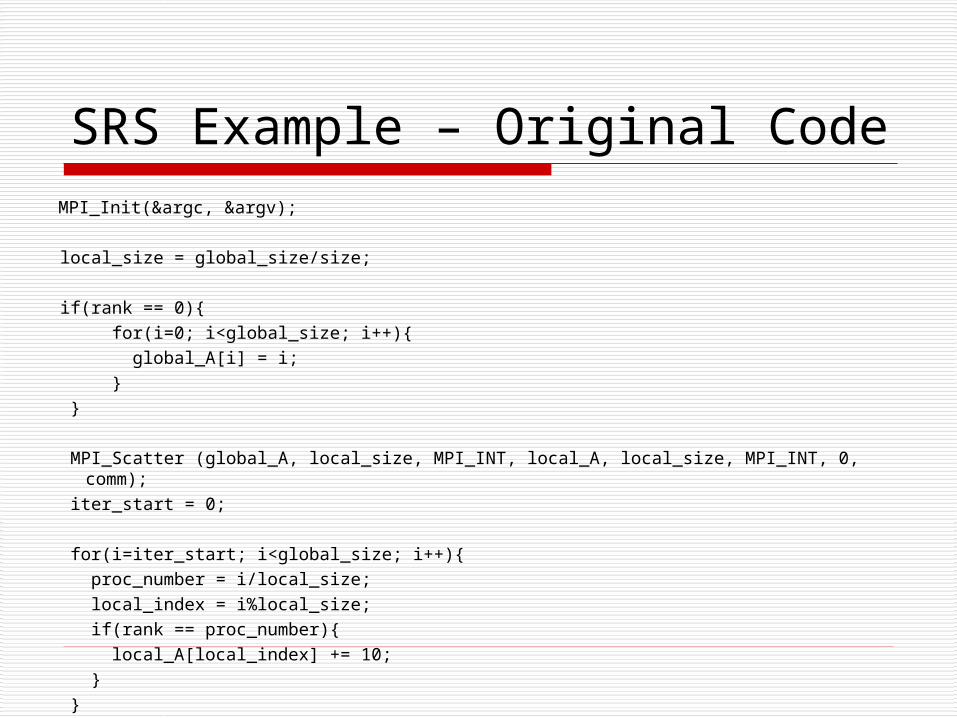
SRS Example – Original Code MPI_Init(&argc, &argv); local_size = global_size/size;
if(rank == 0){ for(i=0; i<global_size; i++){ global_A[i] = i; } }
MPI_Scatter (global_A, local_size, MPI_INT, local_A, local_size, MPI_INT, 0, comm); iter_start = 0; for(i=iter_start; i<global_size; i++){ proc_number = i/local_size; local_index = i%local_size; if(rank == proc_number){ local_A[local_index] += 10; } } MPI_Finalize();
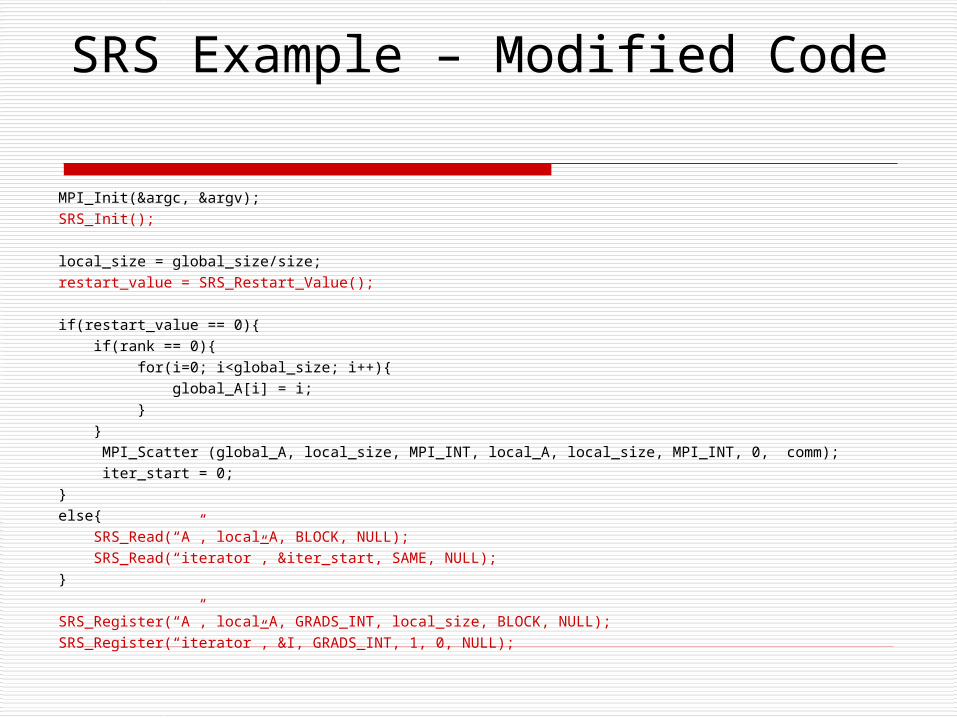
SRS Example – Modified Code
MPI_Init(&argc, &argv); SRS_Init(); local_size = global_size/size; restart_value = SRS_Restart_Value();
if(restart_value == 0){ if(rank == 0){ for(i=0; i<global_size; i++){ global_A[i] = i; } } MPI_Scatter (global_A, local_size, MPI_INT, local_A, local_size, MPI_INT, 0, comm); iter_start = 0; } else{ SRS_Read(“A”, local_A, BLOCK, NULL); SRS_Read(“iterator”, &iter_start, SAME, NULL); } SRS_Register(“A”, local_A, GRADS_INT, local_size, BLOCK, NULL); SRS_Register(“iterator”, &I, GRADS_INT, 1, 0, NULL);
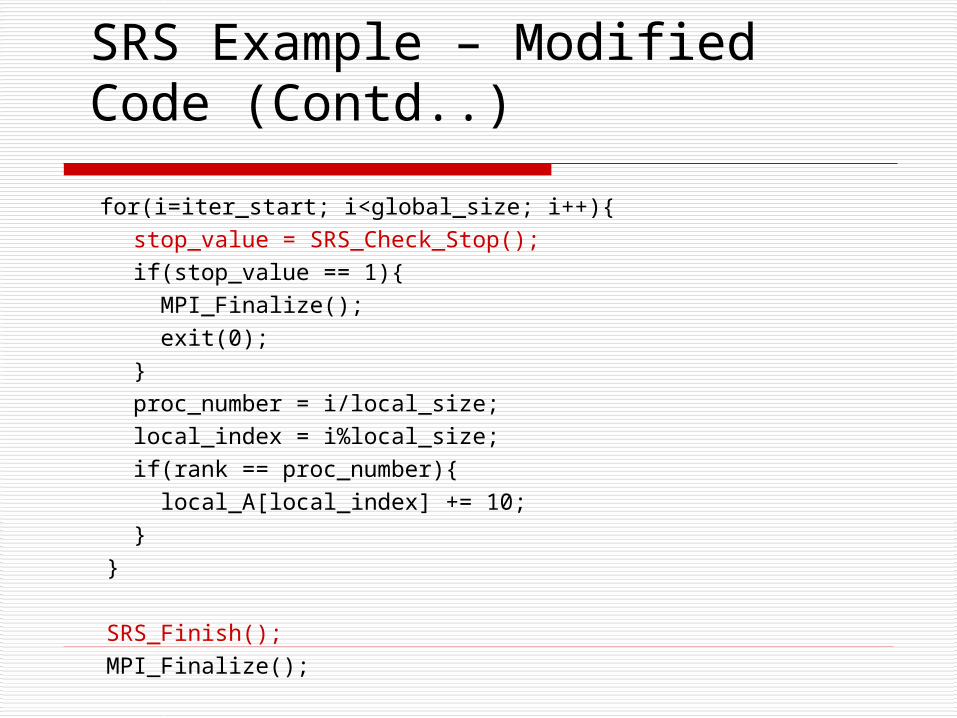
SRS Example – Modified Code (Contd..)
for(i=iter_start; i<global_size; i++){ stop_value = SRS_Check_Stop(); if(stop_value == 1){ MPI_Finalize(); exit(0); } proc_number = i/local_size; local_index = i%local_size; if(rank == proc_number){ local_A[local_index] += 10; } }
SRS_Finish(); MPI_Finalize();
Checkpointing Performance Checkpoint overhead – time added to the
running time of the application due to checkpointing
Checkpoint latency hiding Checkpoint buffering – during checkpointing,
copy data to local buffer, store buffer to disk in parallel with application progress
Copy-on-write buffering – only the modified pages are copied to a buffer. Other pages can be directly stored without copying to buffer. Can be implemented using fork() – forked checkpointing
Checkpointing Performance
Reducing checkpoint size – memory exclusion and checkpoint compression
Memory exclusion – no need to store dead and read-only variables A dead variable is one whose current value
will not be used by the program; The variable will not be accessed again by the program or it will be overwritten before it is read
Read only variable – whose value has not changed since the previous checkpoint
Incremental Checkpointing
Memory exclusion can be made automatic by using incremental checkpointing Store only that part of data that have been
modified from the previous checkpoint Following a checkpoint, all pages in memory
are set to read-only When the program attempts to write a page,
an access violation occurs During next checkpoint, only pages that have
caused access violations are checkpointed
Checkpointing performance – using compression
Using a standard compression algorithm
This is beneficial only if the extra processing time for compression is lower than the savings that result from writing a smaller file to disk
Redundancy/replication + checkpointing for fault tolerance
Replication Every node/process N has a shadow
node/process N’, so that if one of them fail, the other can still continue the application – failure of the primary node no longer stalls the application
Redundancy scales: As more nodes are added to the system, the probability of failure of both a node and its shadow rapidly decreases Only one of the remaining n-1 nodes represent a
shadow node
Replication
Less overhead for checkpointing Higher checkpointing interval/period for
periodic checkpointing Recomputation and restart overheads
are nearly eliminated
Still need checkpointing: Why?
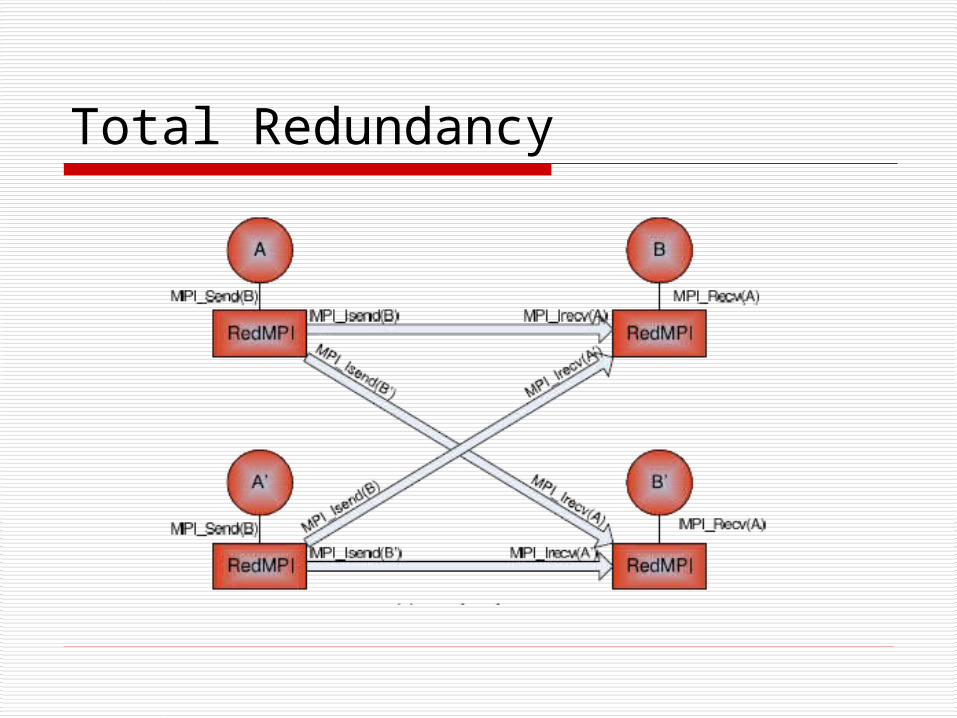
Total Redundancy
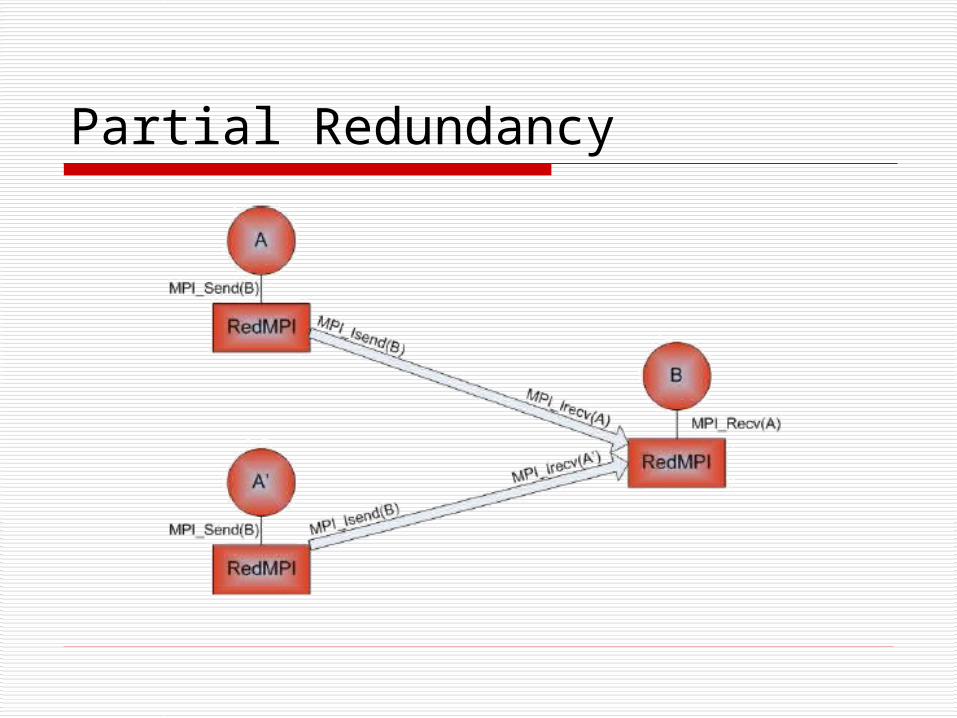
Partial Redundancy
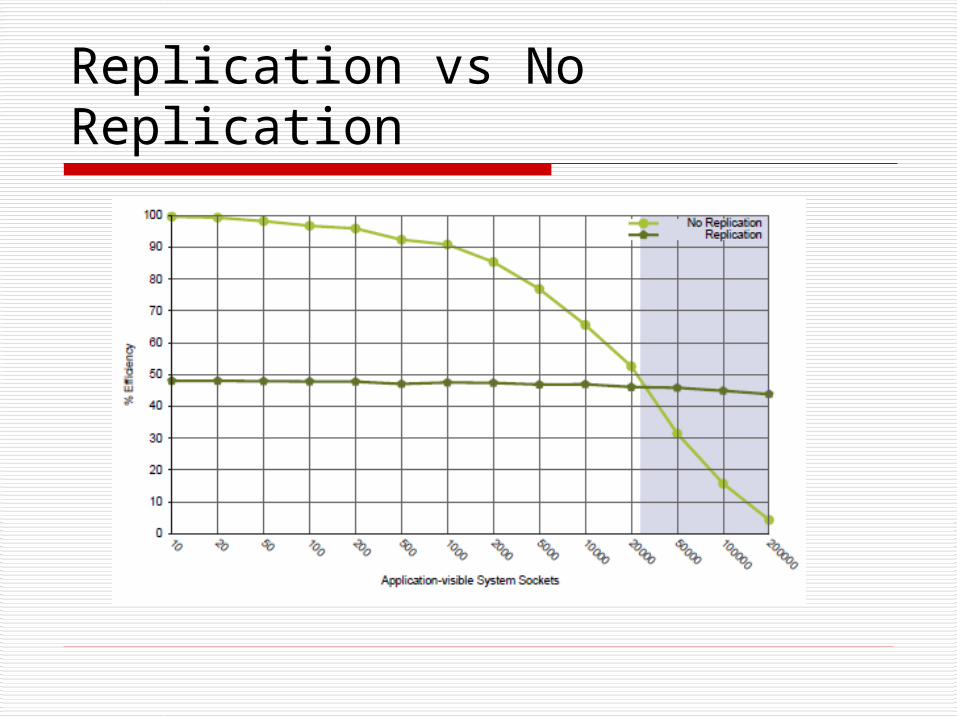
Replication vs No Replication
References James S. Plank,
``An Overview of Checkpointing in Uniprocessor and Distributed Systems, Focusing on Implementation and Performance'', University of Tennessee Technical Report CS-97-372, July, 1997
James Plank and Thomason. Processor Allocation and Checkpointing Interval Selection in Cluster Computing Systems. JPDC 2001.
References MPICH-V: Toward a Scalable Fault Tolerant
MPI for Volatile Nodes -- George Bosilca, Aurélien Bouteiller, Franck Cappello, Samir Djilali, Gilles Fédak, Cécile Germain, Thomas Hérault, Pierre Lemarinier, Oleg Lodygensky, Frédéric Magniette, Vincent Néri, Anton Selikhov -- SuperComputing 2002, Baltimore USA, November 2002
MPICH-V2: a Fault Tolerant MPI for Volatile Nodes based on the Pessimistic Sender Based Message Logging -- Aurélien Bouteiller, Franck Cappello, Thomas Hérault, Géraud Krawezik, Pierre Lemarinier, Frédéric Magniette -- To appear in SuperComputing 2003, Phoenix USA, November 2003
References Vadhiyar, S. and Dongarra, J. “SRS - A
Framework for Developing Malleable and Migratable Parallel Applications for Distributed Systems”. Parallel Processing Letters, Vol. 13, number 2, pp. 291-312, June 2003.
References
Schulz et al. Implementation and Evaluation of a Scalable Application-level Checkpoint-Recovery Scheme for MPI Programs. SC 2004.
References for Replication
Evaluating the viability of process replication reliability for exascale systems. SC 2011.
Combining Partial Redundancy and Checkpointing for HPC. ICDCS 2012