path planning vs. obstacle avoidance no clear distinction, but usually: global vs. local path...
TRANSCRIPT
Path Planning vs. Obstacle Avoidance
No clear distinction, but usually: Global vs. local
Path planning low-frequency, time-intensive search method for global finding of a (optimal) path
to a goal Examples: road maps, cell decomposition
Obstacle avoidance (aka “local navigation”) fast, reactive method with local time and space horizon Examples: vector field histogram, dynamic window algorithm
Gray area Fast methods for finding path to goal that can fail if environment contains local
minima Example: potential field method
Many slides courtesy of Brian Gerkey
Local minima
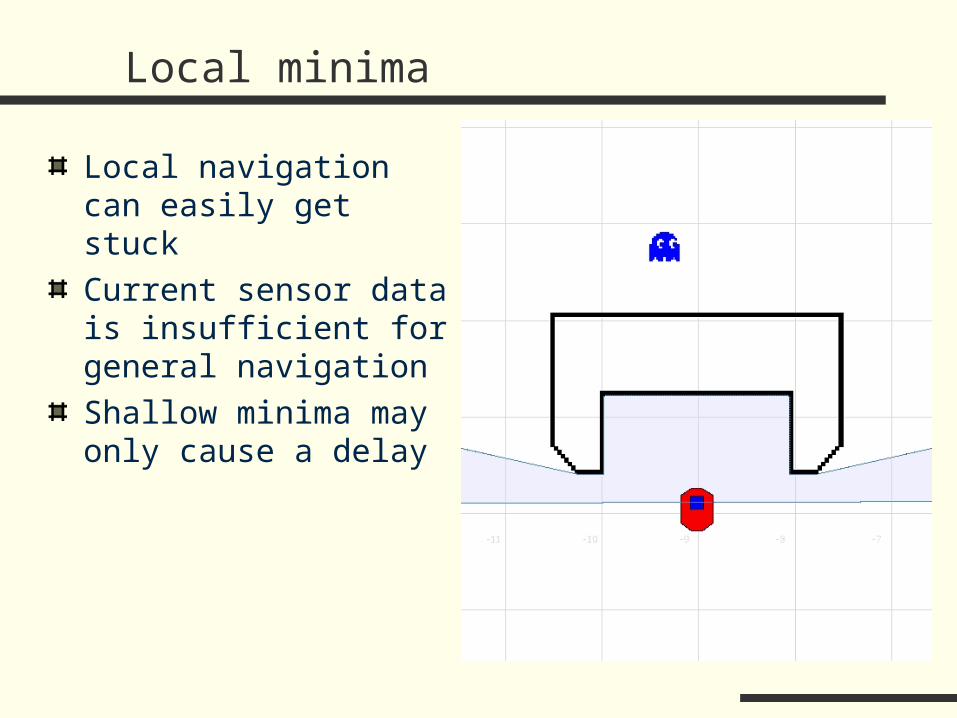
Local navigation can easily get stuck
Current sensor data is insufficient for general navigation
Shallow minima may only cause a delay
Deep minima
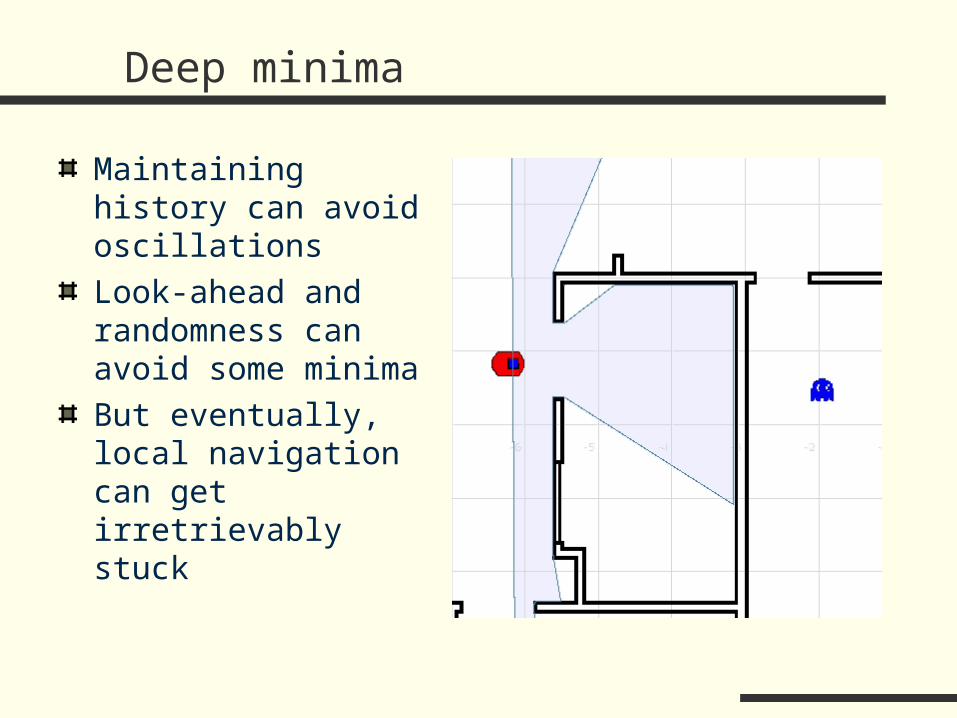
Maintaining history can avoid oscillations
Look-ahead and randomness can avoid some minima
But eventually, local navigation can get irretrievably stuck

Our goal
Given: map robot pose goal pose
Compute: a feasible (preferably
efficient) path to the goal
Also, execute the path may require replanning

Configuration space
workspace (W): The ambient environment in which the robot operates Usually R2 or R3
configuration (q): Complete specification of the position of all points in the robot’s body Set of points in robot’s body is given by R(q)
configuration space, or C-space (Q): Space of all possible configurations C-space dimensionality = # degrees of freedom

Example 1: two-link arm
Two angles fully specify the configuration 2-dimensional configuration
space Q = (1, 2)
Is the position of the end effector a valid configuration specification? Q ?= (X, Y)

Example 2: Sony AIBO
4 legs, 3 dof each 2 in the shoulder 1 in the knee
1 head, 3 dof
15 dof => 15-d C-space Q = (l1,l2,l3,l4,h)
+ 6 DOF real-world pose
Example 3: planar mobile robot
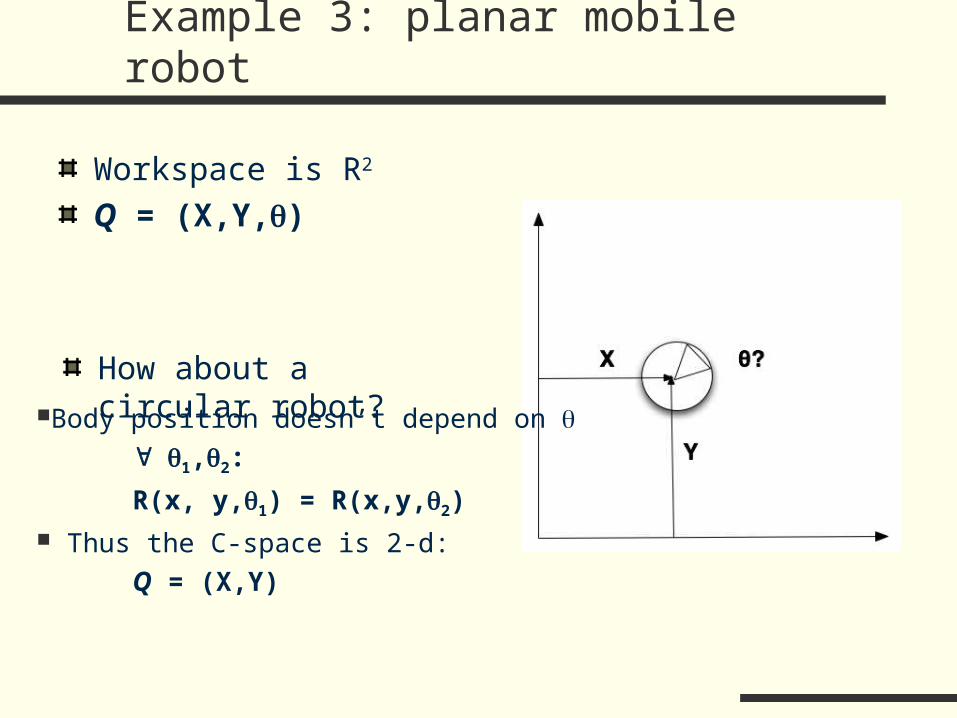
Workspace is R2
Q = (X,Y,)
How about a circular robot?Body position doesn’t depend on
1,2:
R(x, y,1) = R(x,y,2) Thus the C-space is 2-d:
Q = (X,Y)
C-space obstacles
Given workspace obstacle WOi , C-space obstacle QOi is the set of configurations in which the robot intersects WOi :
QOi = {q Q | R(q) WOi }
Free C-space, Qfree , is the set of configurations in which the robot intersects no obstacle:
Qfree = Q \ ( QOi)
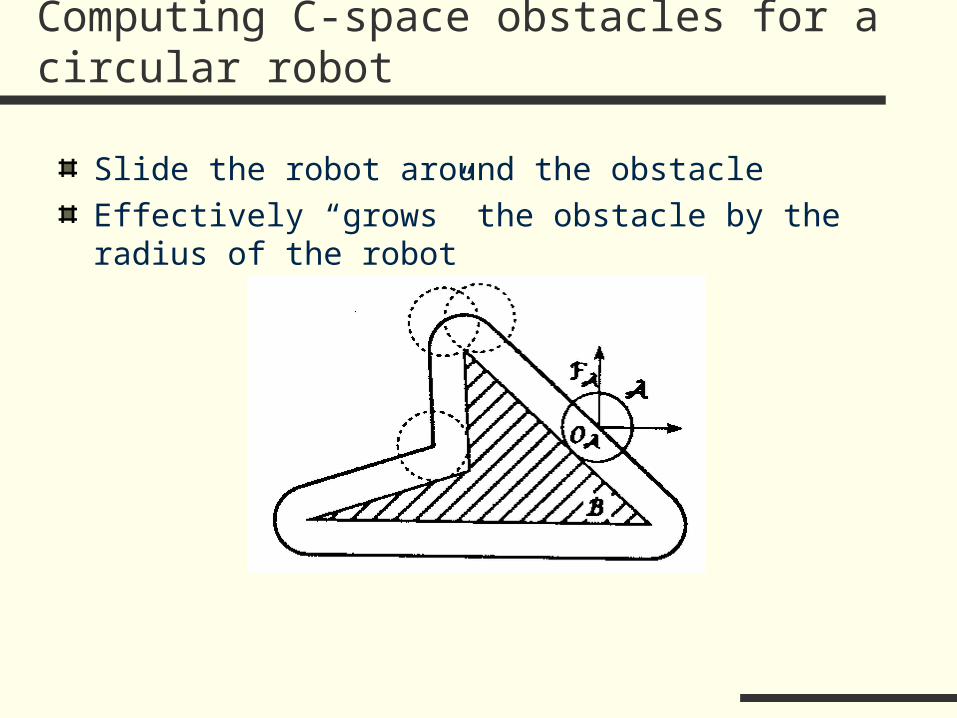
Computing C-space obstacles for a circular robot
Slide the robot around the obstacle
Effectively “grows” the obstacle by the radius of the robot
C-space, radius=1.0m
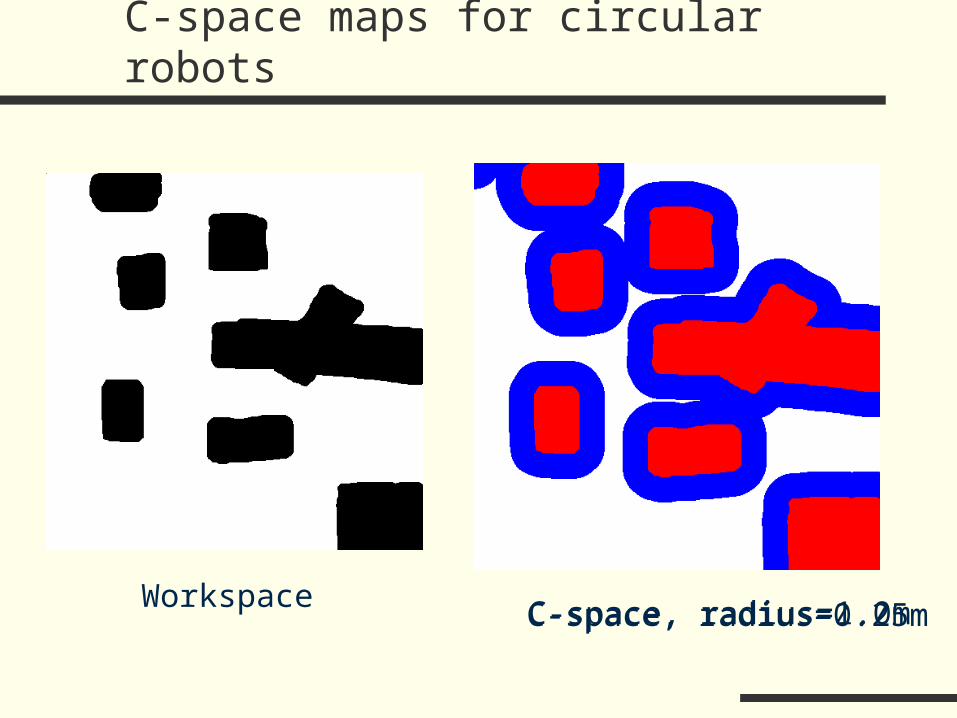
C-space maps for circular robots
WorkspaceC-space, radius=0.25m
10/31/06 CS225B Brian Gerkey
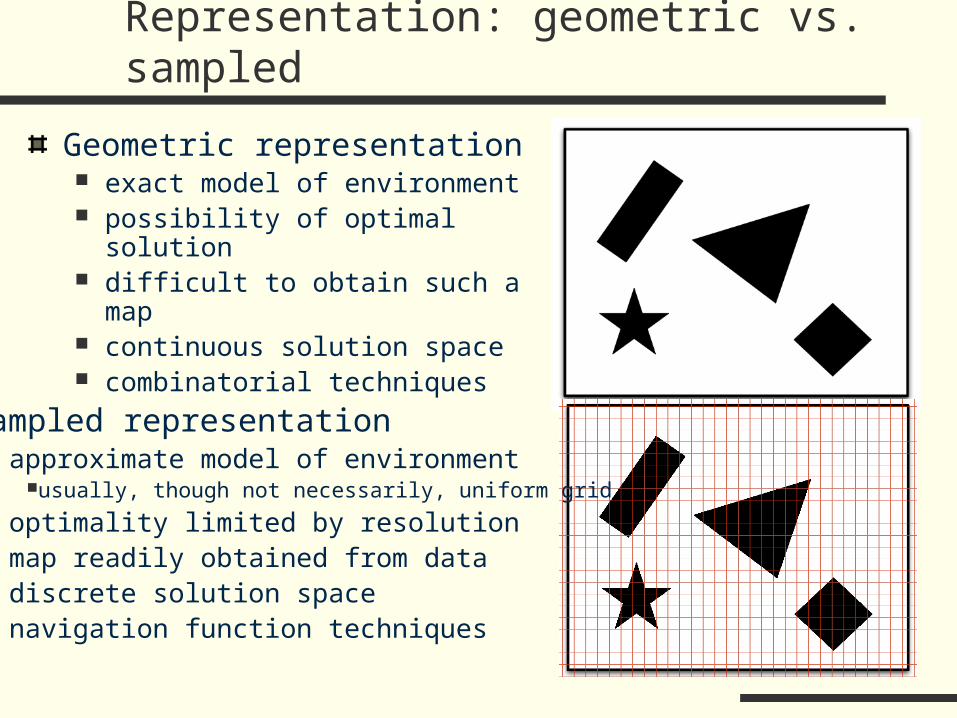
Representation: geometric vs. sampled
Geometric representation exact model of environment possibility of optimal solution difficult to obtain such a map continuous solution space combinatorial techniques
Sampled representation approximate model of environment
usually, though not necessarily, uniform grid optimality limited by resolution map readily obtained from data discrete solution space navigation function techniques
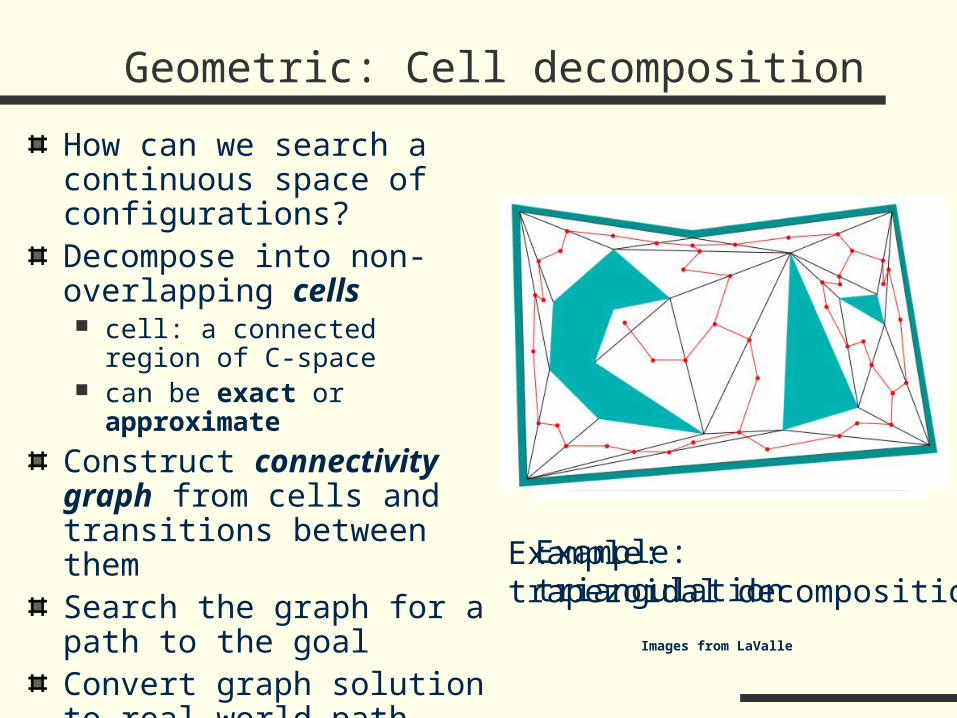
Geometric: Cell decomposition
How can we search a continuous space of configurations?Decompose into non-overlapping cells cell: a connected region of C-space can be exact or approximate
Construct connectivity graph from cells and transitions between themSearch the graph for a path to the goalConvert graph solution to real-world path
Example:trapezoidal decompositionExample:triangulation
Images from LaValle
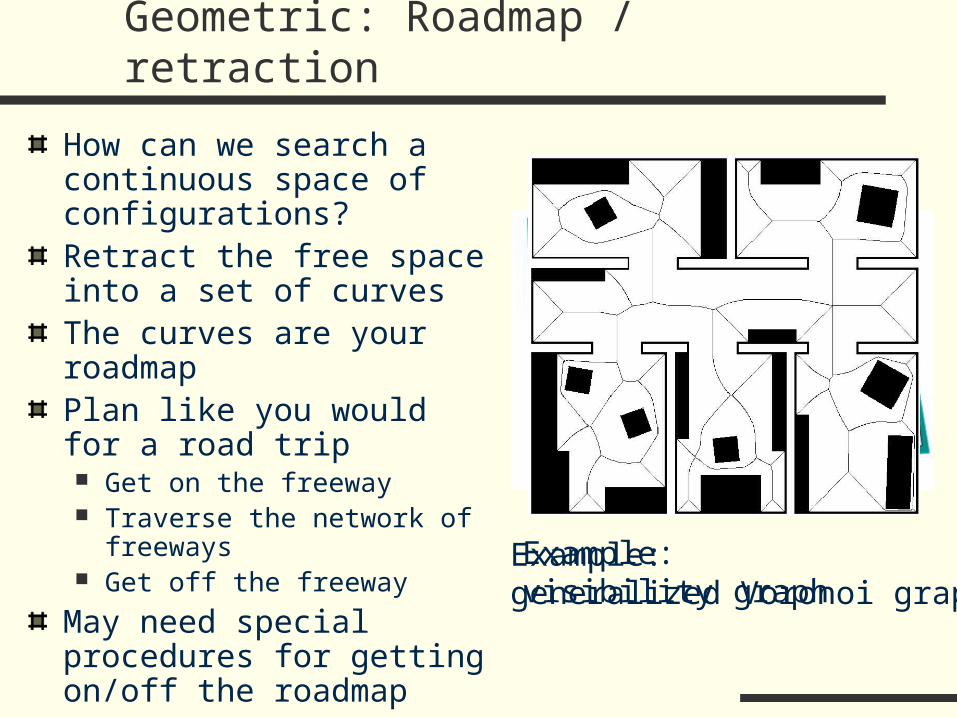
Geometric: Roadmap / retraction
How can we search a continuous space of configurations?Retract the free space into a set of curvesThe curves are your roadmapPlan like you would for a road trip Get on the freeway Traverse the network of freeways Get off the freeway
May need special procedures for getting on/off the roadmap Example:
visibility graphExample:generalized Voronoi graph

10/31/06 CS225B Brian Gerkey

Sampled: potential / navigation functions
For each sampled state, estimate the cost to goal similar to a policy in machine learning
Grid maps: for each cell, compute the cost (number of cells, distance, etc.) to the goalpotential functions are local
Images from LaValle
navigation functions are global

wavefront planner
Given grid map M, robot position p, goal position g
From M, create C-space map MQ
Run brushfire algorithm on MQ: Label grid cell g with a “0” Label free cells adjacent to g with a “1” Label free cells adjacent to those cells with a “2” Repeat until you reach p
Labels encode length of shortest (Manhattan distance) obstacle-free path from each cell to gStarting from p, follow the gradient of labelsComplete
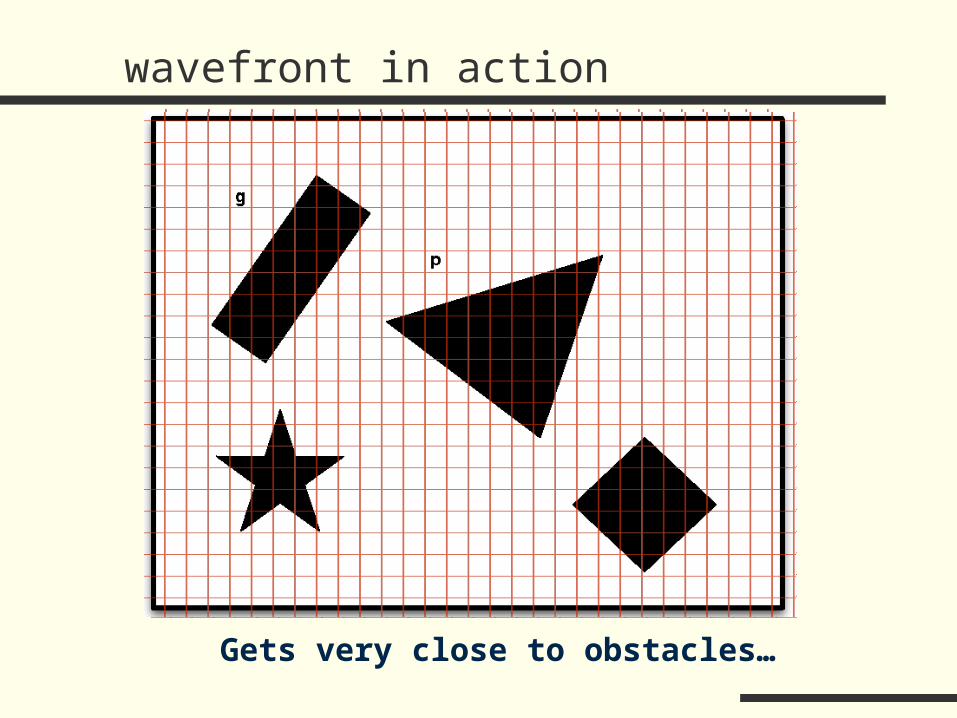
wavefront in action
Gets very close to obstacles…

Inefficient paths
Naïve single-neighbor cost update gives Manhattan distance (maybe with diagonal transitions) The gradient unnecessarily tracks the grid
Graphic fromFerguson and Stentz , Field-D*
True-distance alternatives
Theta* [Nash et al. 2007Field D* [Ferguson and Stentz 2005]E* / gradient [Phillipsen 2006 / Konolige unpub.]Hybrid A* [Dolgov et al. 2008]
Computing true distance [Gradient method]
Naïve single-neighbor cost update gives Manhattan distance (maybe with diagonal transitions) The gradient unnecessarily tracks the grid
In reality, the grid potentials are discrete samples of wave that propagates from the goalA better distance can be had by approximating this wave: Sethian’s Fast Marching Method Huygen’s Principle Konolige’s (unpublished) 2-neighbor plane wave
approximation

Interpolating a potential function
a
bc?
c = fn(a,b) Planar wave approximation
F
a << b => c = a + F
F is the intrinsic cost of motion
isopotentials

Interpolating a potential function
a
bc?
c = fn(a,b) Planar wave approximation
F
a = b => c = a + (1/sqrt(2))*F
F is the intrinsic cost of motion
isopotentia
ls

Interpolating a potential function
a
bc?
c = fn(a,b) Planar wave approximation
F
a < b => c = ???
F is the intrinsic cost of motion
isopotentials
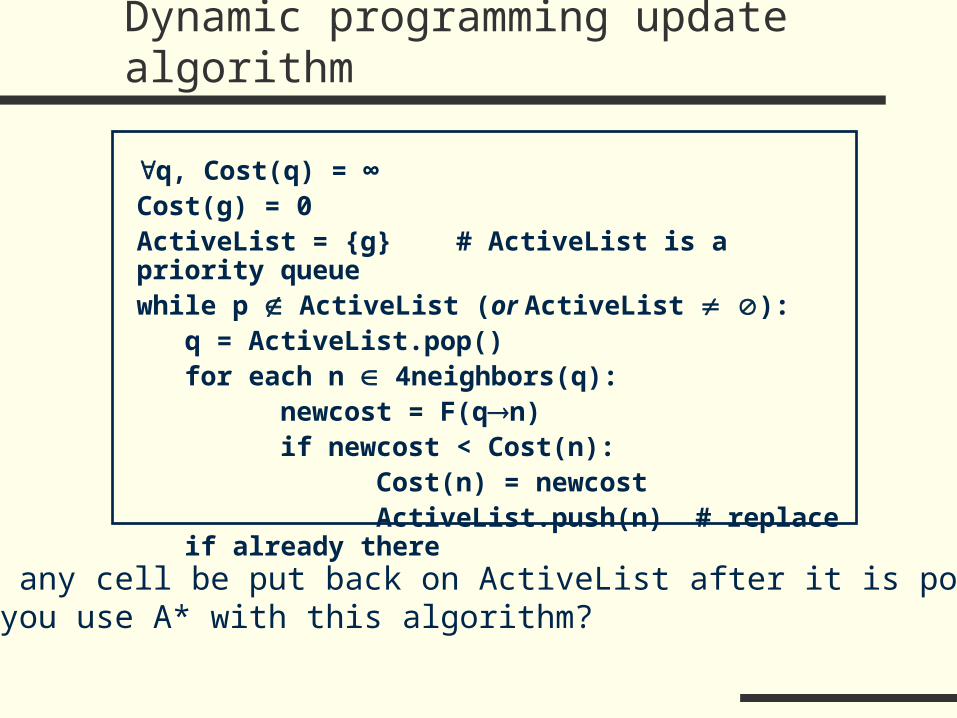
Dynamic programming update algorithm
q, Cost(q) = ∞Cost(g) = 0ActiveList = {g} # ActiveList is a priority queuewhile p ActiveList (or ActiveList ):
q = ActiveList.pop()for each n 4neighbors(q):
newcost = F(qn)if newcost < Cost(n):
Cost(n) = newcostActiveList.push(n) # replace if already
there
Will any cell be put back on ActiveList after it is popped?Can you use A* with this algorithm?
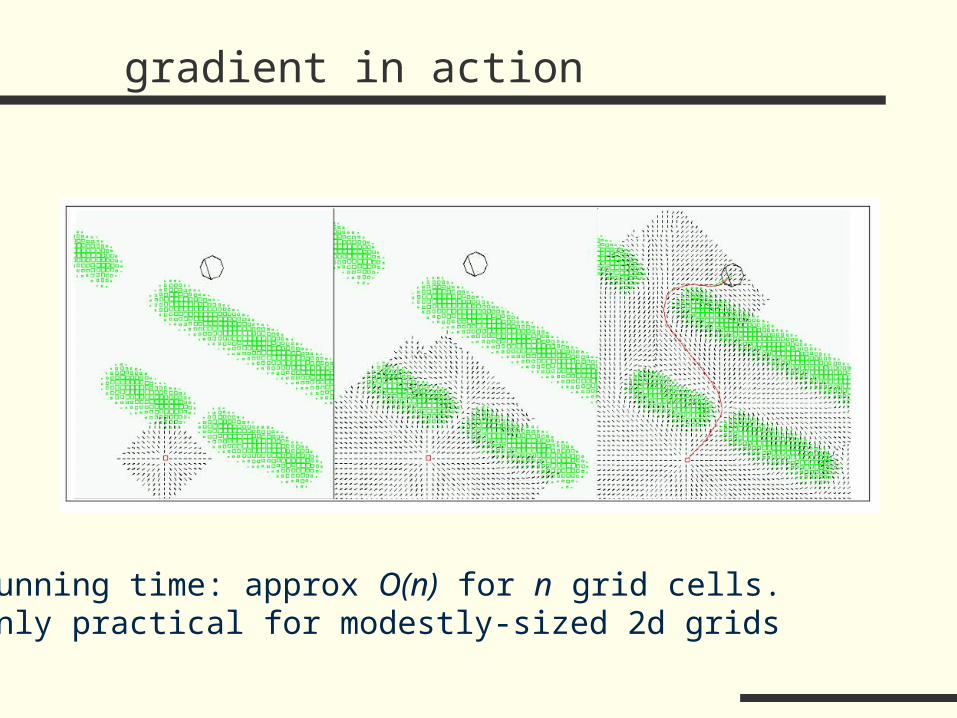
gradient in action
Running time: approx O(n) for n grid cells.Only practical for modestly-sized 2d grids
Obstacle costs
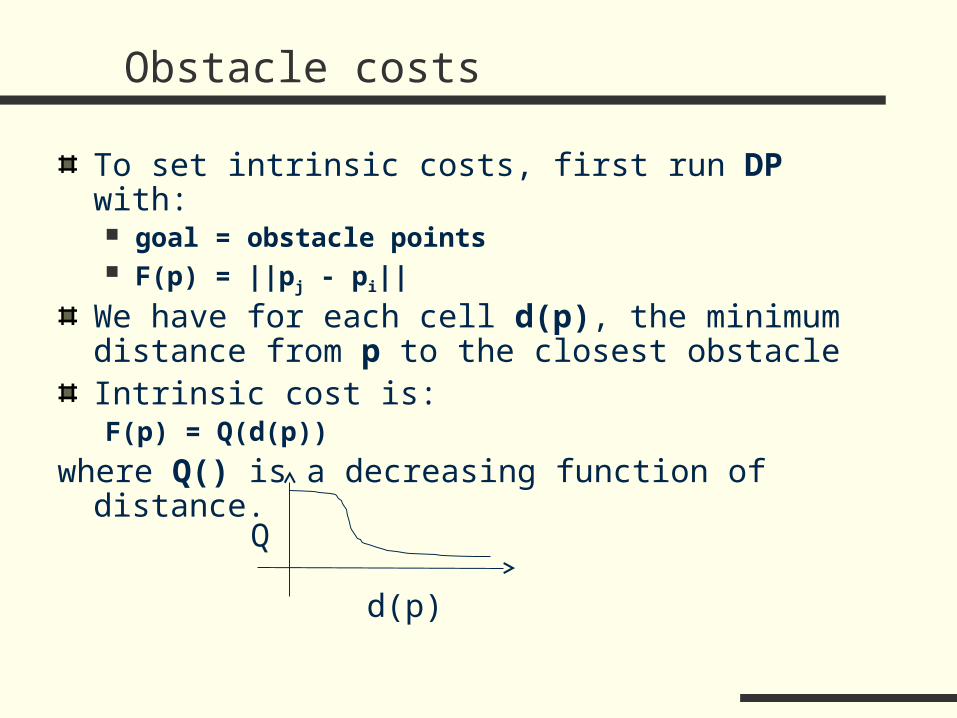
To set intrinsic costs, first run DP with: goal = obstacle points F(p) = ||pj - pi||
We have for each cell d(p), the minimum distance from p to the closest obstacleIntrinsic cost is:F(p) = Q(d(p))
where Q() is a decreasing function of distance.
d(p)
Q
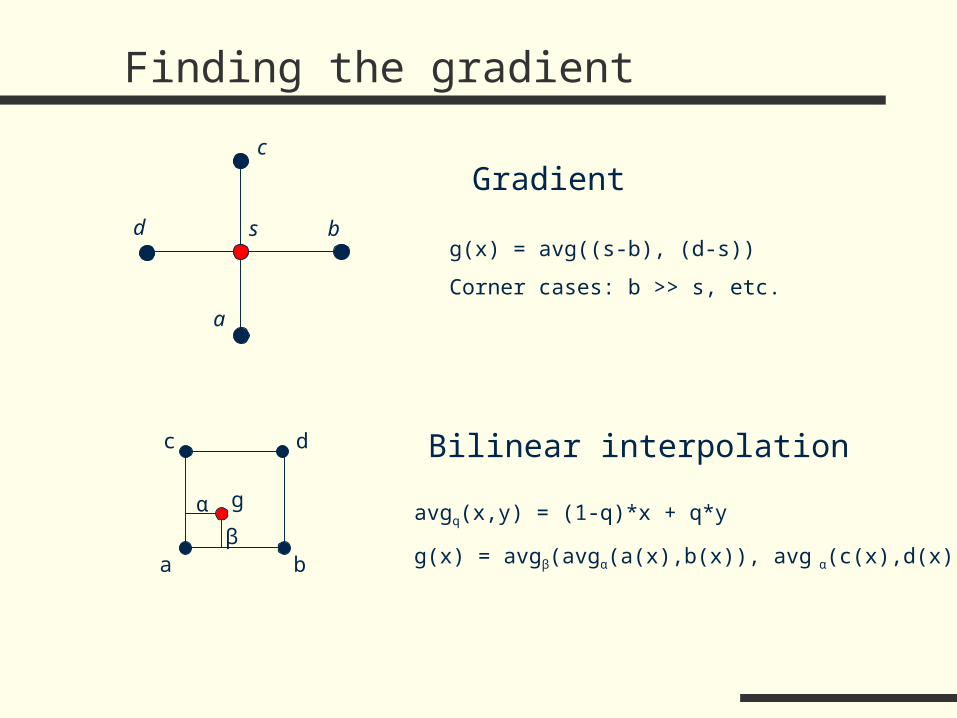
Finding the gradient
Bilinear interpolation
a b
c d
gα
βavgq(x,y) = (1-q)*x + q*y
g(x) = avgβ(avgα(a(x),b(x)), avg α(c(x),d(x)))
a
bsd
c
Gradient
g(x) = avg((s-b), (d-s))
Corner cases: b >> s, etc.

Gradient in LAGR Test 26A

Gradient with A*
Practical concerns
Goals and robot positions will rarely fall exactly at the center of a grid cell Pick the closest cell center OR interpolate cost information between cells
When computing obstacle costs, stop DP when costs drop below a threshold (i.e., far enough from any obstacle)Q(d(p)) should be very large (essentially infinite) when
d(p) < (1/2 * robot_radius) + safety_distance Costs should decrease smoothly and quickly after that.
Choose the step size for gradient carefullyLarger step sizes cause trouble in narrow pinch pointsSmaller step sizes are computationally inefficient
For non-circular robots (e.g,. Erratic), use the longer half-width as the radius No longer complete, but usually works
10/31/06 CS225B Brian Gerkey
Dealing with local obstacles
The map isn’t perfect; neither is localizationHow do you deal with locally-sensed obstacles?
=> LOCAL CONTROLLER
Option 1: VFH or other local controller Pro: easy to implement Pro: can take safety, global path, etc. into account Con: planner / navigator interaction may be suboptimal
Option 2: Local Planner Pro: potentially optimal behavior for unforseen obstacles Con: planner has to run FAST
10/31/06 CS225B Brian Gerkey
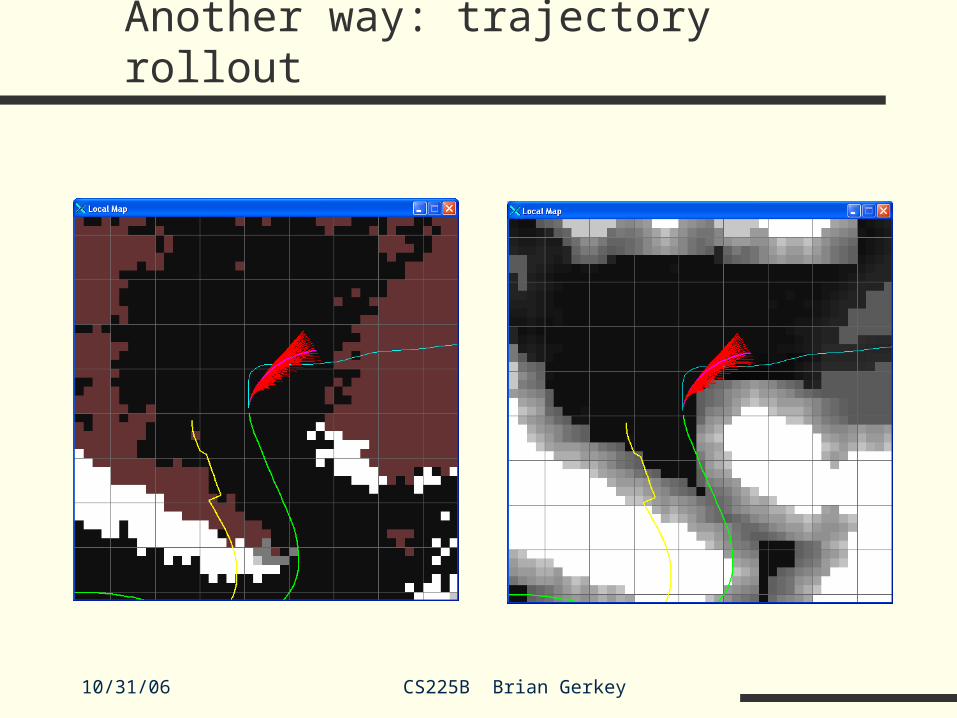
Another way: trajectory rollout

10/31/06 CS225B Brian Gerkey
Gradient + trajectory rollout in exploration: LAGR
Average speed > 1m/s
LAGR-Eucalyptus run
LAGR-Eucalyptus run - montage
LAGR-Eucalyptus run - map

10/31/06 CS225B Brian Gerkey
Local Planner
Pick some small area to do local planning Look ahead on global plan for the local goal point Add in local obstacles from sensors
Things to look out for: How do you track the local path? When do you replan the global plan?
10/31/06 CS225B Brian Gerkey
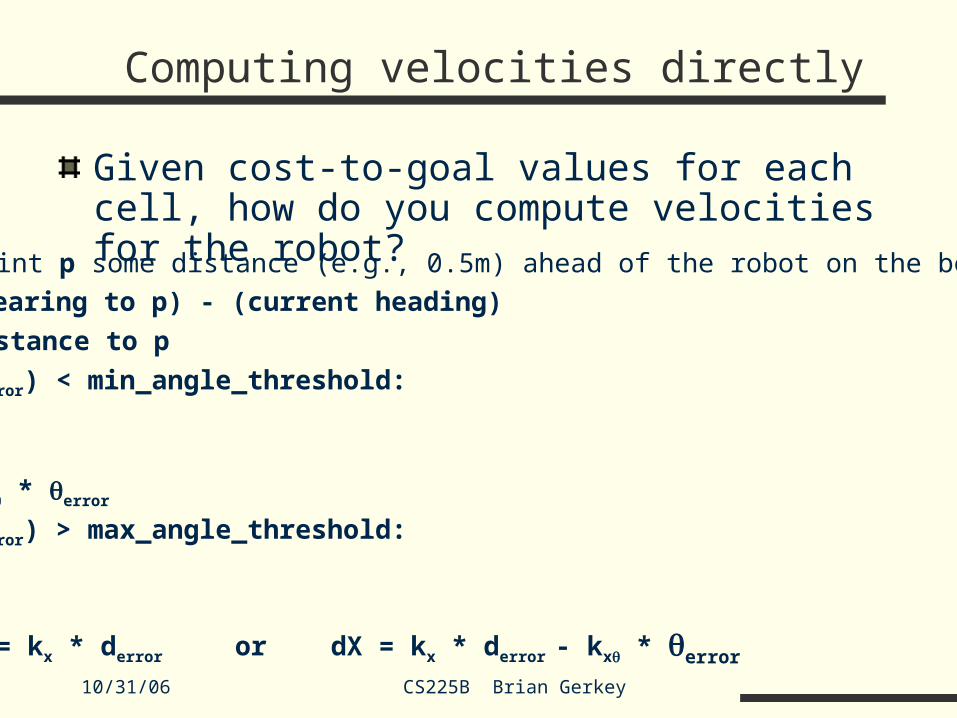
Computing velocities directly
Given cost-to-goal values for each cell, how do you compute velocities for the robot?
Pick a point p some distance (e.g., 0.5m) ahead of the robot on the best path
error = (bearing to p) - (current heading)
derror = distance to p
if abs(error) < min_angle_threshold:d = 0
else:
d = k * error
if abs(error) > max_angle_threshold:dX = 0
else:
dX = kx * derror or dX = kx * derror - kx * error