design and development of an inexpensive acoustic ...my.fit.edu/~swood/john claus technical...
TRANSCRIPT
1
Design and Development of an Inexpensive Acoustic Underwater Communications and Control System Technical Project pursuant to the M.S. Ocean Engineering degree requirements Florida Institute of Technology – Spring 2014 John Claus

2
1 CONTENTS
2 Preface .................................................................................................................................................. 4
3 Introduction .......................................................................................................................................... 4
4 Underwater Acoustics History [3] ......................................................................................................... 8
5 Acoustic Communications Design Considerations .............................................................................. 11
5.1 Frequency Attenuation ............................................................................................................... 11
5.2 Doppler shift ............................................................................................................................... 12
5.3 Multi-path ................................................................................................................................... 14
6 Signal Processing ................................................................................................................................. 16
6.1 Fourier Transform ....................................................................................................................... 16
6.2 Discrete Fourier Transform (DFT) ............................................................................................... 19
6.3 Fast Fourier Transform (FFT) ....................................................................................................... 21
7 Project Design ..................................................................................................................................... 22
7.1 Theory ......................................................................................................................................... 22
7.1.1 Motivation ........................................................................................................................... 22
7.1.2 Combinatorics ..................................................................................................................... 23
7.2 Initial System Design ................................................................................................................... 25
7.2.1 Hardware............................................................................................................................. 25
7.2.2 Software .............................................................................................................................. 26
7.3 Improved System Design ............................................................................................................ 28
7.3.1 Hardware............................................................................................................................. 28
7.3.2 Software .............................................................................................................................. 31
8 References .......................................................................................................................................... 38
9 Appendices .......................................................................................................................................... 39
9.1 Python Code ................................................................................................................................ 39
9.1.1 Shared Main ........................................................................................................................ 39
9.1.2 Laptop Main ........................................................................................................................ 40
9.1.3 Raspberry Pi Main ............................................................................................................... 41
9.1.4 freq_map function .............................................................................................................. 42
9.1.5 synthComplex function ....................................................................................................... 43
9.1.6 convert_freq function ......................................................................................................... 44
9.1.7 test_array function ............................................................................................................. 45

3
9.1.8 playback function ................................................................................................................ 46
9.1.9 file_to_wave function ......................................................................................................... 47
9.1.10 file_to_freq_array function ................................................................................................. 47
9.1.11 clean_freq function ............................................................................................................. 48
9.1.12 convert_to_map function ................................................................................................... 49
9.1.13 command_arduino function ............................................................................................... 50
9.2 Arduino Code .............................................................................................................................. 50
9.2.1 Receiver ............................................................................................................................... 50
9.2.2 Transmitter ......................................................................................................................... 56
9.2.3 FFT Library ........................................................................................................................... 67
9.3 Permutation Matrix .................................................................................................................... 75
9.4 LabView Virtual Instrument ........................................................................................................ 80

4
2 PREFACE
This project incorporates the material and academic topics covered in the majority of
my coursework here at the Florida Institute of Technology. Much of the signal processing
algorithms, specifically with DFTs, were covered in Digital Signal Processing I (ECE 5245) The
design of the frequency mapping algorithm was accomplished by using techniques learned in
Combinatorics / Graph Theory (MTH 5050). The Arduino software and hardware
implementation methodologies were covered extensively in Mechatronics (MAE 5316). The
control software was developed as a result of ample programming in a Python environment in
Artificial Intelligence/Robotics (CSE 5694). The underwater acoustic design considerations were
a direct result from coursework in Hydroacoustics (OCE 4545). The methodologies for the
design and development of the LabView signal processing software was cultivated in
Instrumentation Design and Scientific Measurement (MAE 5318) and the overall system design
incorporated techniques from Control Systems (MAE 4014). This technical project also reflects
the multi-disciplinary approach that I took to pursue my M.S. in Ocean Engineering by
incorporating aspects from Electrical Engineering, Mechanical Engineering, Computer Science,
and Ocean Engineering.
3 INTRODUCTION
The initial purpose of this technical project was to improve a personal understanding of
both the current communications methods and protocols used in modern acoustic modems as
well as develop a reliable and inexpensive system using off the shelf electronics,
microcontrollers, and single board computers. Acoustic communications are the predominant
method used today for the transfer of data underwater. There are a wide number of
applications such as underwater instrumentation monitoring, controlling and communicating
with various underwater robotic systems such as Remotely Operated Vehicles (ROVs) and
Autonomous Underwater Vehicles (AUVs), and submerged equipment recovery. Currently,
there is a great deal of research into developing a new infrastructure of underwater sensors
networks that communicate oceanographic information in near real time. These networks will
5
allow for quicker detection and analysis of pollution data, tsunami prediction, and
meteorological information. [1] A compact, inexpensive, and reliable device that can
communicate acoustically to buoys and other equipment that are interfaced with satellite
communication systems would be highly desirable for the creation of this network
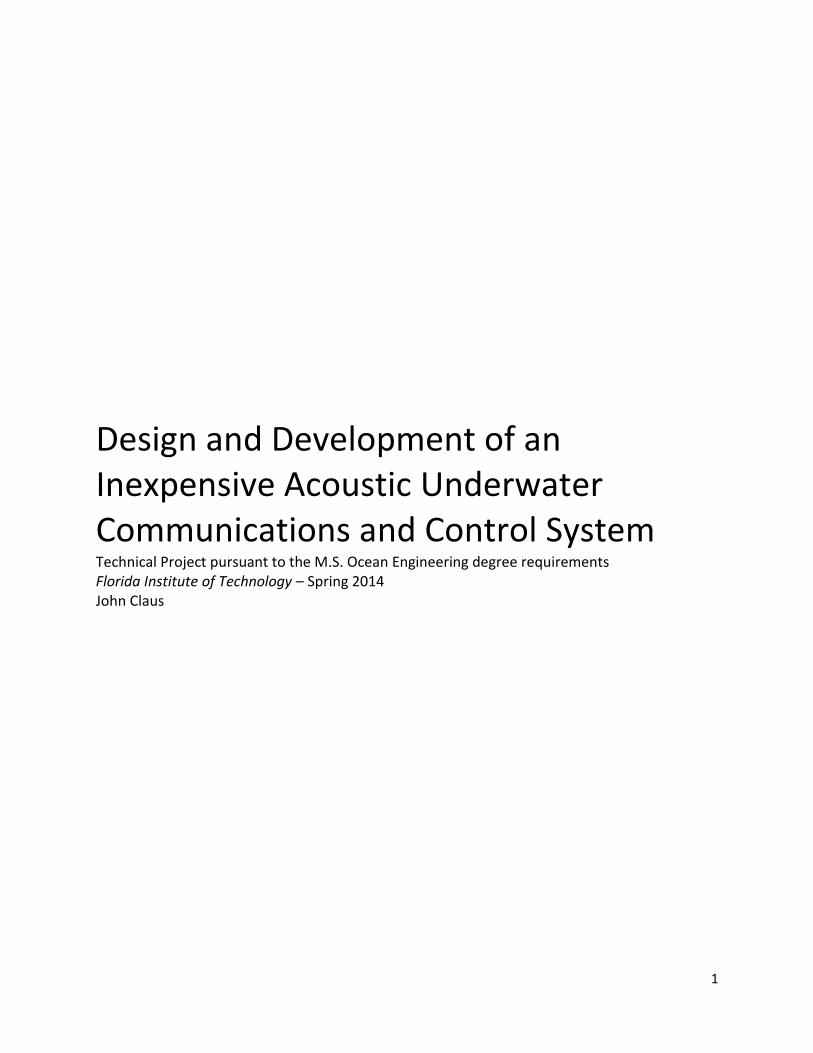
inexpensively. Initially, the end product of this Technical Project was to develop and design an
underwater communications device that could be interfaced with such a system by using Atmel
microcontrollers, a Raspberry Pi single board computer, and a Laptop computer with LabView
as seen in Figure 1.
However, the implemented communication protocol which I developed, though reliable
in its broadcast and reception, was not sufficiently fast enough to merit its use over traditional
acoustic modem methodologies for large scale data transfers. The project did provide insight
into a novel means by which an inexpensive command and control network could be
implemented for subsea systems where valves, actuators, inflation bags, switching devices, and

6
data collections systems can be controlled from the surface via laptop connected to a
hydrophone and underwater speaker. (See Figure 2)
Figure 2: Unidirectional System
The preferred medium for wireless communication underwater has been sound due to
the highly absorptive properties of seawater with respect to radio waves. Most Radio Wave (RF)
frequencies are completely absorbed by water within only a few meters. There is a logarithmic
relationship, as can be seen in Figure 2, of RF attenuation in seawater. The attenuation factor,
α, in decibels per meter for water is related to the square root of the frequency, f, in hertz [Hz]
multiplied by the conductivity of the water, σ, in Siemens per meter [S/m]. The resulting electric
field, Ex, is an exponential function of the attenuation. [2]
√
7
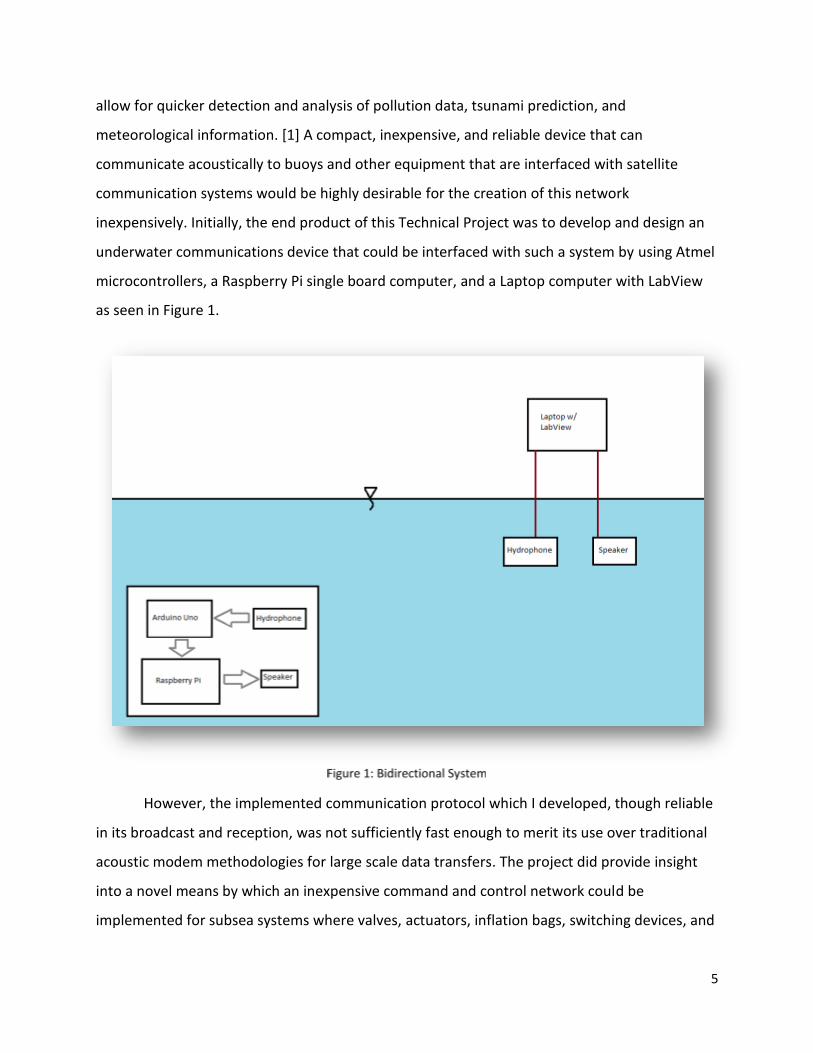
One can see that the Extremely Low Frequencies (ELF), Super Low Frequencies (SLF),
and Ultra Low Frequencies (ULF) of the order of 1 to 1000 Hz are the only practical frequencies
which can be used for subsea RF communications. Please note that these figures and
calculations only account for the primary losses from radio wave attenuation and do not
account for other additional losses such as those specific to different fluid densities. As a result
of these losses, underwater radio systems require high power and extremely long transmitting
antennae due to their long wavelengths and are therefore impractical for the majority of
underwater communications applications.
Figure 3: Approximate RF Frequency Attenuations in Seawater [2]
There are significant challenges with the signal processing of acoustic communications
that are distinctly different than that of over the air RF communications. First of all, the speed
of sound underwater (~1500 m/s) is significantly slower than that of RF energy (~3x108 m/s)
This slower speed increases the amount of time the data takes to traverse the distance
between a transmitter and receiver yielding the information to be near-real time at best. The
slower speed also results in more pronounced effects such as multipath and Doppler shift (see
Acoustic Communication Design Considerations) not normally encountered in typical RF
communications. Secondly, there is a much lower maximal frequency range (kHz) with
underwater acoustic communications than that of RF (GHz). As can be seen in the Signal
Processing section of this paper, this affects the maximum amount of information that can be
sent per second. Resultantly, the data transfer rates for current acoustic modems are limited to
a maximum of 115kbps. This Technical Project investigates these limitations through an
independent experimental development of an alternative communications protocol.

8
4 UNDERWATER ACOUSTICS HISTORY [3]
Underwater acoustic properties have been known by man for over two millennia.
However, the majority of modern day investigations into the subject have been undertaken in
the last two hundred years. In the mid-300s B.C. Aristotle noted that sound could be heard in
water as good as in air. Nearly eighteen hundred years later, Leonardo DaVinci observed that
ships could be heard at great distances underwater. In the 1620s, Marin Mersenne published
“L’Harmonie Universelle” in which he described his experiments with sound and experimental
measurements of its speed. This is the first book of record in modern times that was published
on the subject of hydroacoustics.
Figure 4: Excerpt from “L’Harmonie Universelle” [4]
Sixty years later, a more formalized mathematical representation of sound propagation could
be found in Sir Isaac Newton’s “Philosphiae Naturalis Principia Mathematica.” Building off of
the work of Newton, Abbé J.A. Nollet later performed a series of experiments in 1743 that
proved sound could indeed travel underwater.
An accurate measure of sound velocities underwater was performed through a series of
experiments by different scientists throughout the 1800s. In 1820, Froncois Sulpice Beudant
9
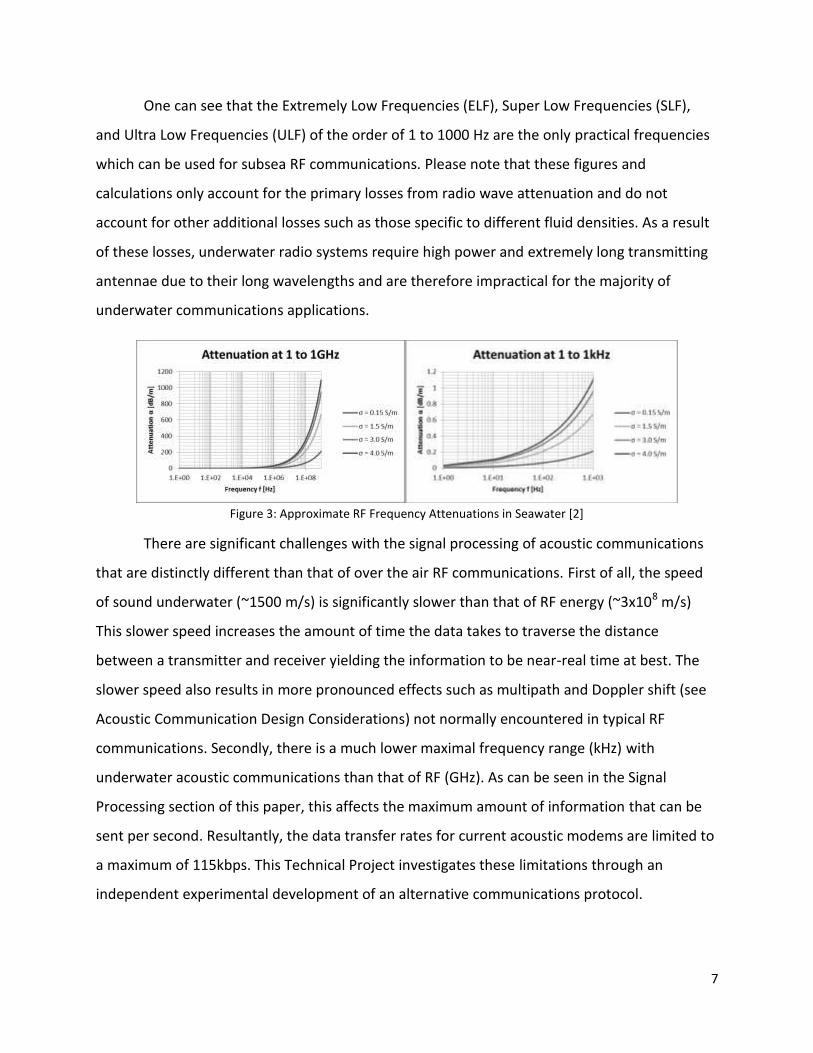
measured the speed of sound in the ocean near Marseilles as being 1500 m/s. Jean-Daniel
Colladon and Charles-Francois Sturn measured the speed of sound across Lake Geneva in 1826
by using an underwater bell and gunpowder. Two men were on a boat where a bell was rang
underwater exactly at the same time as gunpowder on the surface was ignited. Another group
of men located 10 miles away then measured the difference between the gunpowder flash and
the bell’s sound arrival times. Using this information they were able to calculate that the
sound’s velocity underwater in Lake Geneva at 8o C was 1435 m/s.
Figure 5: Colladon and Stern’s Experimental Setup [5]
The wave equation for sound was first formulated by Lord Rayleigh in 1877 in his work
“The Theory of Sound.” This equation would later be instrumental in expanding our knowledge
about scattering, absorption, and reflection of sound waves underwater. Throughout the First
World War, the technological development for underwater acoustics focused primarily on
submarine and mine detection. Advances in this branch of hydroacoustics eventually led to a
better understanding of effects of water as medium for sound as well as more robust
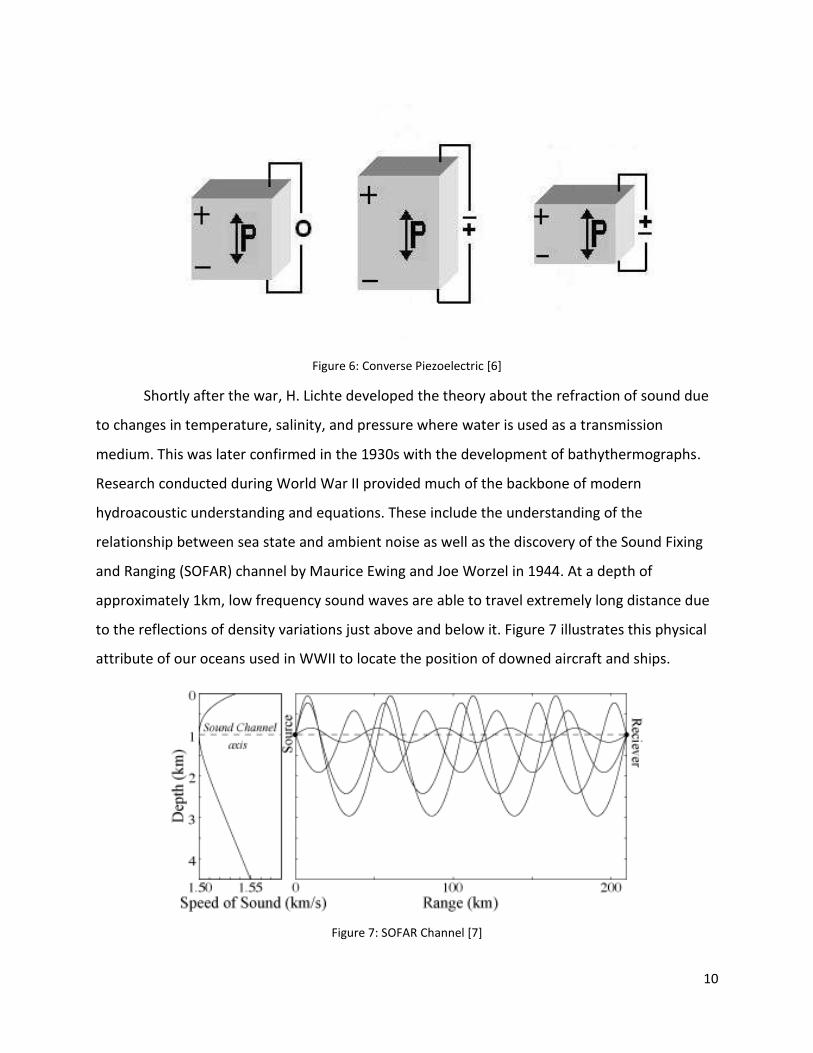
technologies for the transmission and reception of sound underwater. An example of this is the
use of the piezoelectric effect to produce sound by sandwiching quartz crystals in between to
steel plates in 1917 by Paul Langevin. They were able to create sound using a reversing voltage
polarity at a given frequency to cause the piezo crystal to expand and contract at that given
frequency. This allowed them to convert electrical energy into compressional sound waves by
way of mechanical motion as can be seen in Figure 6.
10
Figure 6: Converse Piezoelectric [6]
Shortly after the war, H. Lichte developed the theory about the refraction of sound due
to changes in temperature, salinity, and pressure where water is used as a transmission
medium. This was later confirmed in the 1930s with the development of bathythermographs.
Research conducted during World War II provided much of the backbone of modern
hydroacoustic understanding and equations. These include the understanding of the
relationship between sea state and ambient noise as well as the discovery of the Sound Fixing
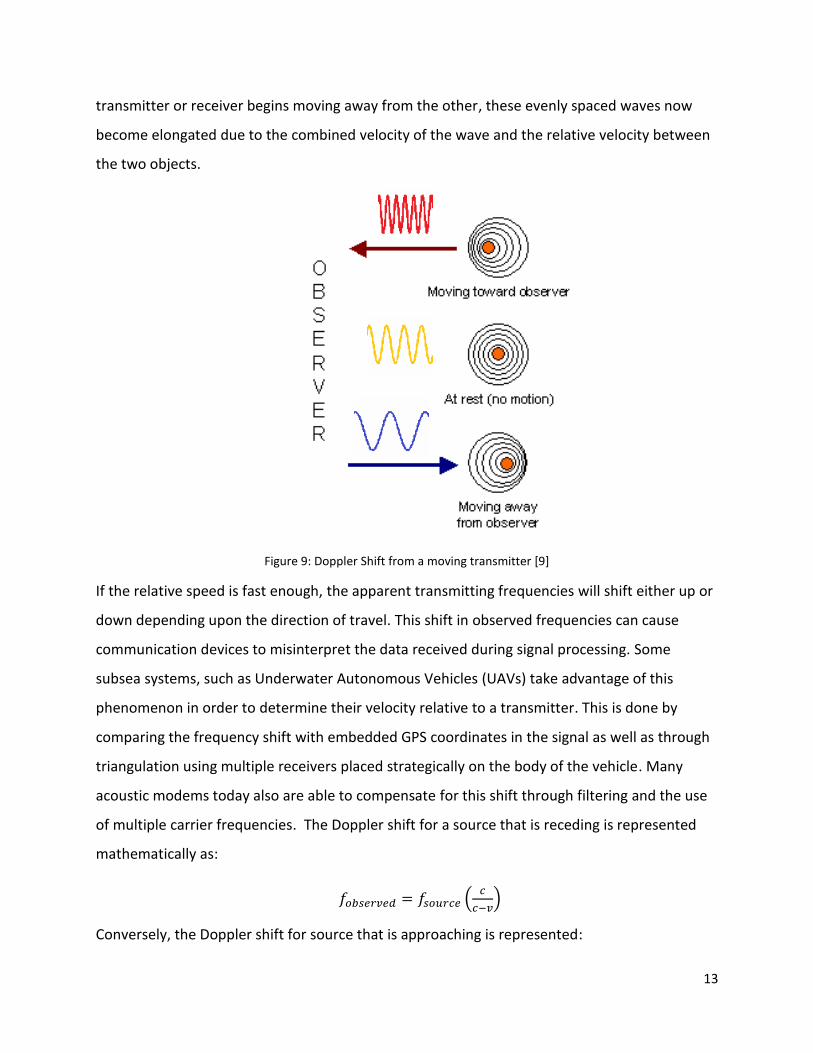
and Ranging (SOFAR) channel by Maurice Ewing and Joe Worzel in 1944. At a depth of
approximately 1km, low frequency sound waves are able to travel extremely long distance due
to the reflections of density variations just above and below it. Figure 7 illustrates this physical
attribute of our oceans used in WWII to locate the position of downed aircraft and ships.
Figure 7: SOFAR Channel [7]

11
Advances in technology continue today. A great deal of research has been devoted to
increasing bandwidth and data transfer rates as more advanced subsea devices are put in to
use in our oceans.
5 ACOUSTIC COMMUNICATIONS DESIGN CONSIDERATIONS
5.1 FREQUENCY ATTENUATION
The attenuation of an acoustic signal in water depends primarily on the frequency of the
signal. This is due to the conversion of the mechanical and compressive energy of the acoustic
signal into thermal energy by the vibration of the molecules used as a transmission medium. In
the case of seawater, the density of the medium can vary depending upon the salinity,
pressure, and temperature of the water. This means that different layers of the ocean can
attenuate certain frequencies greater than others. In general, higher frequencies tend to be
absorbed at a greater magnitude than that of lower frequencies. Additionally attenuation also
occurs from spreading loss. Spreading loss results from the geometric distribution of the
compressive mechanical energy from the transmitting source. (See Figure 8) This type of loss is
frequently modeled as spherical at short distances and cylindrical at long distances because of
the relative geometric change once the signal reaches the surface and seafloor.
Figure 8: Spherical and Cylindrical Spreading Loss [9]

12
Both of these losses act in effect as part of the frequency response of the system or medium by
which the signal is transmitted over. For frequencies under 50 kHz as in this project, these
attenuated losses ( ) can be expressed using the following equation [8]:
( ) (
)
( )
Where,
( )
The absorption coefficient is defined as ( ) where f is frequency. The transmission distance, ,
is determine in reference to distance, . The spreading loss is modeled with k which equal to 1
if the spreading loss is cylindrical and 2 if it is spherical. The calculated attenuation value in
conjunction with ambient noise. N, present in the medium and the spectral power density, S, of
the transmitter is used to determine the signal to noise ratio, SNR, as can be seen in the
following equation [8]:
( )
( ) ( )⁄
These equations are useful in determining a rough estimate of the range of the transmitter
given a known power output and spectral density. Variations in density of the ocean at various
depths and salinities do not however make it an exact science. The device designed in this
project uses relatively low frequencies and its primary function is for communications at
distances of 500 meters or less. Its operating parameters are therefore well within these
constraints given acceptable and realistic transmission power requirements.
5.2 DOPPLER SHIFT
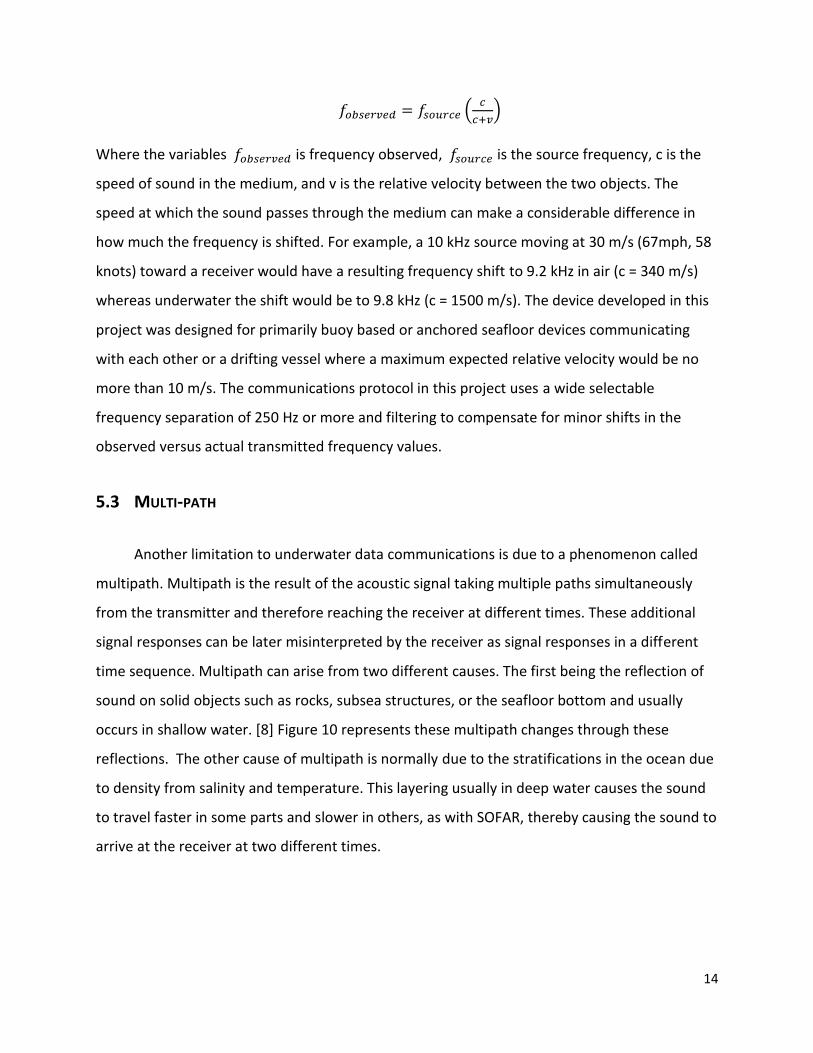
An additional consideration when designing acoustic communication systems is the
Doppler shift. This shift is due to the compression and elongation of waves by a moving object.
As can be seen with the example in Figure 9, a transmitting object that is not moving relative to
its receiver has evenly spaced wavelengths over the whole of its geometry. Once either the
13
transmitter or receiver begins moving away from the other, these evenly spaced waves now
become elongated due to the combined velocity of the wave and the relative velocity between
the two objects.
Figure 9: Doppler Shift from a moving transmitter [9]
If the relative speed is fast enough, the apparent transmitting frequencies will shift either up or
down depending upon the direction of travel. This shift in observed frequencies can cause
communication devices to misinterpret the data received during signal processing. Some
subsea systems, such as Underwater Autonomous Vehicles (UAVs) take advantage of this
phenomenon in order to determine their velocity relative to a transmitter. This is done by
comparing the frequency shift with embedded GPS coordinates in the signal as well as through
triangulation using multiple receivers placed strategically on the body of the vehicle. Many
acoustic modems today also are able to compensate for this shift through filtering and the use
of multiple carrier frequencies. The Doppler shift for a source that is receding is represented
mathematically as:
(
)
Conversely, the Doppler shift for source that is approaching is represented:
14
(
)
Where the variables is frequency observed, is the source frequency, c is the
speed of sound in the medium, and v is the relative velocity between the two objects. The
speed at which the sound passes through the medium can make a considerable difference in
how much the frequency is shifted. For example, a 10 kHz source moving at 30 m/s (67mph, 58
knots) toward a receiver would have a resulting frequency shift to 9.2 kHz in air (c = 340 m/s)
whereas underwater the shift would be to 9.8 kHz (c = 1500 m/s). The device developed in this
project was designed for primarily buoy based or anchored seafloor devices communicating
with each other or a drifting vessel where a maximum expected relative velocity would be no
more than 10 m/s. The communications protocol in this project uses a wide selectable
frequency separation of 250 Hz or more and filtering to compensate for minor shifts in the
observed versus actual transmitted frequency values.
5.3 MULTI-PATH
Another limitation to underwater data communications is due to a phenomenon called
multipath. Multipath is the result of the acoustic signal taking multiple paths simultaneously
from the transmitter and therefore reaching the receiver at different times. These additional
signal responses can be later misinterpreted by the receiver as signal responses in a different
time sequence. Multipath can arise from two different causes. The first being the reflection of
sound on solid objects such as rocks, subsea structures, or the seafloor bottom and usually
occurs in shallow water. [8] Figure 10 represents these multipath changes through these
reflections. The other cause of multipath is normally due to the stratifications in the ocean due
to density from salinity and temperature. This layering usually in deep water causes the sound
to travel faster in some parts and slower in others, as with SOFAR, thereby causing the sound to
arrive at the receiver at two different times.

15
Figure 10: Multipath Signal Distortion [7]
The multipath signal in shallow water is normally easier to model due to its uniform density.
The speed of sound remains constant as a result of this uniform density and therefore its time
delay is a linear function of sound velocity divided by the total distance traveled. Additionally,
the gain of this system decreases linearly with this increased distance as a function of the
frequency. However, changes in density as seen in a deep water environment, affect the speed
of the signal and hence the signal’s phase. It also can affect the gain of the signal differently
with no clear linear pattern. Overcoming these challenges requires the system to compensate
for these phase and gain changes by being able to both capture the frequency response of each
path and filter out path frequency responses that are asynchronous with the communication
signal. Milica Stonjanovic quantifies these variations in multipath frequency response and
impulse response through the use of the following equations in “Underwater Acoustic
Communications: Design Considerations on the Physical Layer” [8]. and are the
frequency response and impulse response respectively for each path, p, at a given frequency, f:
( ) ∑ ( )

16
( ) ∑ ( )
The variable is the time for the signal to reach the receiver for each path and ( ) is the
inverse Fourier transform of ( ). For the purposes this project, multipath was overcome
through longer transmit times. It was determined experimentally, that the system had poor
frequency separation at shorter transmit time intervals, therefore a greater number of
frequencies were used with a longer transmit time in order to balance the density of data per
second.
6 SIGNAL PROCESSING
An integral portion of the functionality of this project’s communication protocols
required an analysis of the frequency spectrum of an acoustic signal measured in the time
domain. This conversion was accomplished through the use a Fast Fourier Transform (FFT). In
order to understand an FFT works, one must first understand the Continuous Fourier Transform
and its digital version, the Discrete Fourier Transform.
6.1 FOURIER TRANSFORM
In 1822, Joseph Fourier published “Theorie analytique de la chaleur” where he
introduced the idea that nearly every function can be described as a summation of sine and
cosine functions with different weights and frequencies as seen in the equation below. This
equation is known as the Fourier series [10].
( ) ∑( )

17
This equation can also be modified to describe a periodic function of x over discrete distances
– and . [10]
( ) ∑(
)
Where the coefficients are defined,
∫ ( )
∫ ( )
Normally, periodic signals or waveforms that are analyzed for signal processing are taken over
the time domain where ( ) is a function of time rather than some distance x. The sampling
window of the periodic function now becomes –t0 to t0. The Fourier series for the periodic
function in time domain therefore come to be:
( ) ∑(
)
Where,
∫ ( )
∫ ( )
Much of signal processing also involves the complex plane. This is due to primarily to phase
shifts that take place on an analog signal as a result of the system’s physical characteristics. For
example, suppose one were to inject a sine wave voltage into three different circuits: One with
a resistor, one with an inductor, and one with a capacitor as seen in Figure 11. The measured
current of the resistive circuit A would have the same phase as that of the voltage. The

18
measured currents, however, of inductive and capacitive circuits B and C would be shifted 90o
negatively and positively respectively.
Figure 11: Phase response of a resistor, inductor, and capacitor [11]
This phase shifts are best represented mathematically over the complex plane. Therefore the
ideal Fourier series for use in signal processing is the complex Fourier series where the
coefficient sine component is an imaginary number . The series then takes the form:
( ) ∑
⁄
Where,
∫ ( )
⁄
This series represents the time dependent function ( ) as a combination of circles on the
complex plane. If we want to express those values and find the transformation to the frequency
domain we must first identify that the limits or window of the periodic function as defined by t0
can be expressed as a frequency ω0 through the relationship:

19
Through the substitution of cn into the Fourier series with some careful Calculus and Algebra as
seen on page 846 Donald A. McQuarrie’s “Mathematical Methods for Scientists and Engineers”
[10] we are able to arrive to the inverse Fourier transform:
( )
√ ∫ ( )
Where ( ) is the function of ( ) represented in the frequency domain. Inversely, the Fourier
transform can be used to map the time domain function ( ) over the frequency domain:
( )
√ ∫ ( )
This mathematical property allows us to solve both ordinary and partial differential equations
by analyzing time dependent functions in the frequency domain. For signal processing, this
gives us a bridge between the time domain and frequency domain of signal which allows one to
model the characteristics of the system that signal goes through. The calculated or measured
frequency response of the system, ( ), can be convolved with the input signal ( ) to find
and predict the effects of the system on the output ( ). These functions in the frequency
domain can then be returned time domain through the use of the Inverse Fourier Transform.
This project uses the Fourier Transform to determine the component frequencies of the
transmitted signals and also can be used to test the acoustic frequency response of various
underwater systems. The LabView Virtual Instrument in this project was developed specifically
for the purpose of signal analysis of a given transmitting medium.
6.2 DISCRETE FOURIER TRANSFORM (DFT)
One design limitation to this project is the fact that the acoustic signals could not be
measured continuously due to the non-continuous nature of digital electronics. Discrete
amplified analog voltages sampled at regular pre-determined intervals were taken from the
microphones and converted into arrays of digital representations. The conversion of these
discrete samples over time must be done using a discrete Fourier transform, or DFT for short. A
variation of the Fourier transform, known as the discrete time Fourier transform (DTFT), is
20
nearly identical to the Fourier transform with the samples ( ) are mapped over the imaginary
plane through summation rather than integration.
( ) ∑ ( )
The resulting ( ) is the representative frequency component of multiple values of ( ).
Also it is important to notice that is used instead of for the imaginary. This notation is typical
in signal processing and electrical engineering in order to avoid confusion with the current .
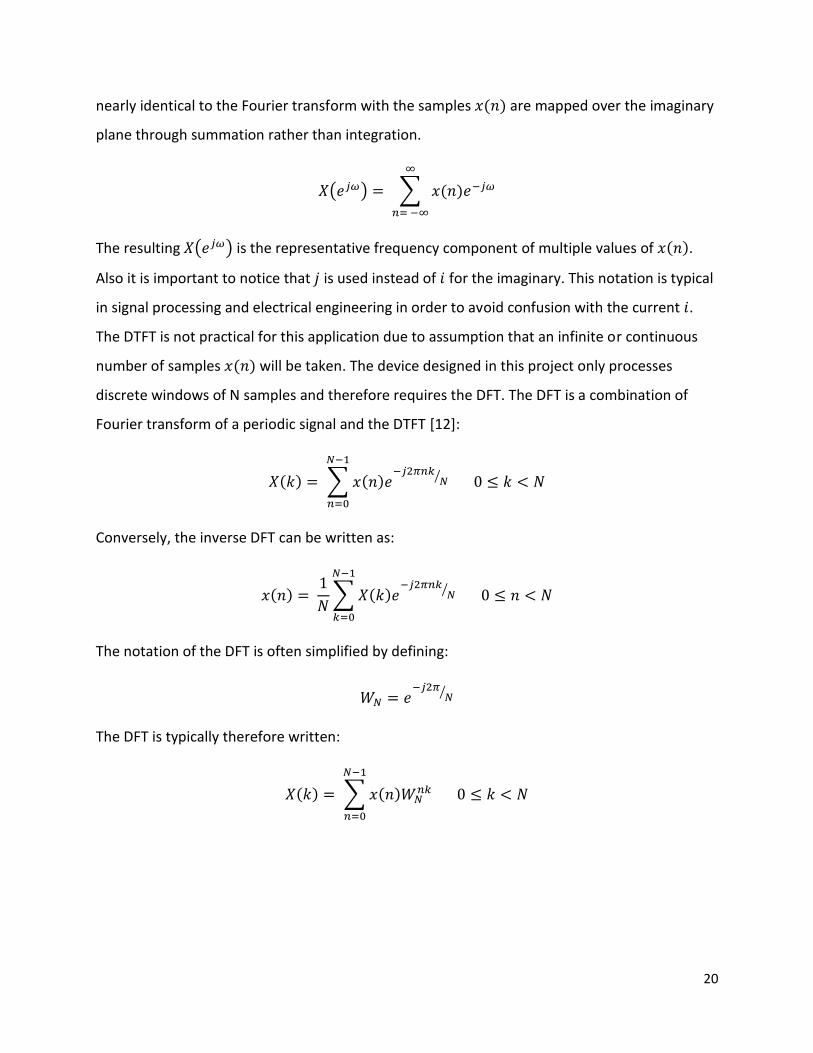
The DTFT is not practical for this application due to assumption that an infinite or continuous
number of samples ( ) will be taken. The device designed in this project only processes
discrete windows of N samples and therefore requires the DFT. The DFT is a combination of
Fourier transform of a periodic signal and the DTFT [12]:
( ) ∑ ( )
⁄
Conversely, the inverse DFT can be written as:
( )
∑ ( )
⁄
The notation of the DFT is often simplified by defining:
⁄
The DFT is typically therefore written:
( ) ∑ ( )

21
6.3 FAST FOURIER TRANSFORM (FFT)
The conversion of a time domain based array of samples into an array of magnitudes for a
correlating frequency component of the captured signal requires an extensive number of
computations by the computer processor when using the DFT. For larger processors the speed
is sufficient to make these calculations fast enough so that the data is transformed fast enough
for hardware integration. However, when using a smaller processor on microcontrollers like the
Arduino Uno, a more efficient algorithm is required. This is accomplished through the use of the
Fast Fourier Transform (FFT). The FFT takes advantage of the symmetry in order to minimize the
total number of calculations undertaken by the processor. There are many different FFT
algorithms that are in use today. The FFT used in this project was an open source FFT that used
a decimation-in-time radix-2 algorithm. This algorithm splits the captured time domain signal
into even and odd indexed terms and then exploits repetitious calculations through a butterfly
pattern where at each node a varying twiddle factor W weights the indexed term.
Figure 12: Eight point radix-2 decimation in time FFT

22
7 PROJECT DESIGN
7.1 THEORY
7.1.1 Motivation
The motivation behind this project and resulting technical report was to design, build,
and test a system that transmits and receives data acoustically through spaced frequencies as
chords representing Boolean table values. The device’s eventual intended use is for the wireless
control and actuation of various mechatronic devices underwater and/or the collection of data
from subsea instrumentation. The transmitted chord of frequencies represents a command that
is sent to an underwater device. For example, a four frequency system at 1 kHz, 2 kHz, 3 kHz,
and 4 kHz would represent a four bit binary number. Should all four frequencies be transmitted
as a chord simultaneously, the resulting binary representation of the signal would be 1111.
Similarly, if only 1 kHz and 3 kHz signals were transmitted as a chord the resulting binary
representation would be 0101. Therefore a four bit four frequency signal would correlate to 15
possible command variations. The receiver would determine the frequencies transmitted
through the use of a FFT and then correlate those frequencies to the binary command
sequence that was issued by the transmitter through the use of a table. Below is an example
table of command sequences:
Table 1: Example system command byte correlation
23
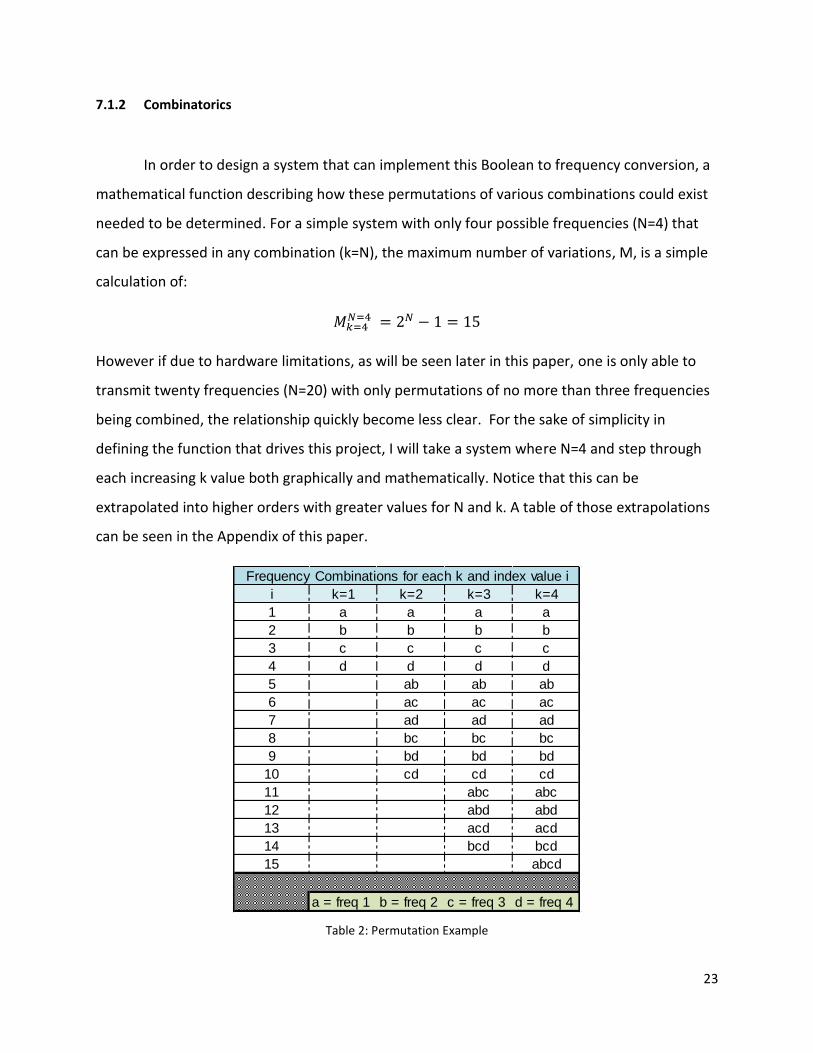
7.1.2 Combinatorics
In order to design a system that can implement this Boolean to frequency conversion, a
mathematical function describing how these permutations of various combinations could exist
needed to be determined. For a simple system with only four possible frequencies (N=4) that
can be expressed in any combination (k=N), the maximum number of variations, M, is a simple
calculation of:
However if due to hardware limitations, as will be seen later in this paper, one is only able to
transmit twenty frequencies (N=20) with only permutations of no more than three frequencies
being combined, the relationship quickly become less clear. For the sake of simplicity in
defining the function that drives this project, I will take a system where N=4 and step through
each increasing k value both graphically and mathematically. Notice that this can be
extrapolated into higher orders with greater values for N and k. A table of those extrapolations
can be seen in the Appendix of this paper.
Table 2: Permutation Example
i k=1 k=2 k=3 k=4
1 a a a a
2 b b b b
3 c c c c
4 d d d d
5 ab ab ab
6 ac ac ac
7 ad ad ad
8 bc bc bc
9 bd bd bd
10 cd cd cd
11 abc abc
12 abd abd
13 acd acd
14 bcd bcd
15 abcd
a = freq 1 b = freq 2 c = freq 3 d = freq 4
Frequency Combinations for each k and index value i

24
Notice that for a k value of 1, the maximum number of permutations is exactly equal to the
number of frequencies. This should be intuitive as only one frequency can be transmitted at a
time when k=1.
Now if k is increased to 2, the maximum number of permutations becomes the summation of
all positive integers over N.
∑
Increasing k to 3 appears to complicate things even further:
∑∑
However, analyzing a table of calculated M from N and k shows that a clear pattern exists:
Table 3: Extrapolated Values for Maximum Variation M
The maximum number of permutations can be written as a function of previous maximum
permutation values for a system with one less frequency:
This relationship between other maximum permutation calculations allows the calculation of
larger systems without requiring increased processing time for large nested summations.
1 2 3 4 5 6 7 8 9 10
2 1 3 6 10 15 21 28 36 45 55
3 1 3 7 14 25 41 63 92 129 175
4 1 3 7 15 30 56 98 162 255 385
5 1 3 7 15 31 62 119 218 381 637
6 1 3 7 15 31 63 126 246 465 847
7 1 3 7 15 31 63 127 254 501 967
8 1 3 7 15 31 63 127 255 510 1012
9 1 3 7 15 31 63 127 255 511 1022
10 1 3 7 15 31 63 127 255 511 1023
Number of Frequencies (N)
Perm
uta
tion V
alu
e (
k)
25
7.2 INITIAL SYSTEM DESIGN
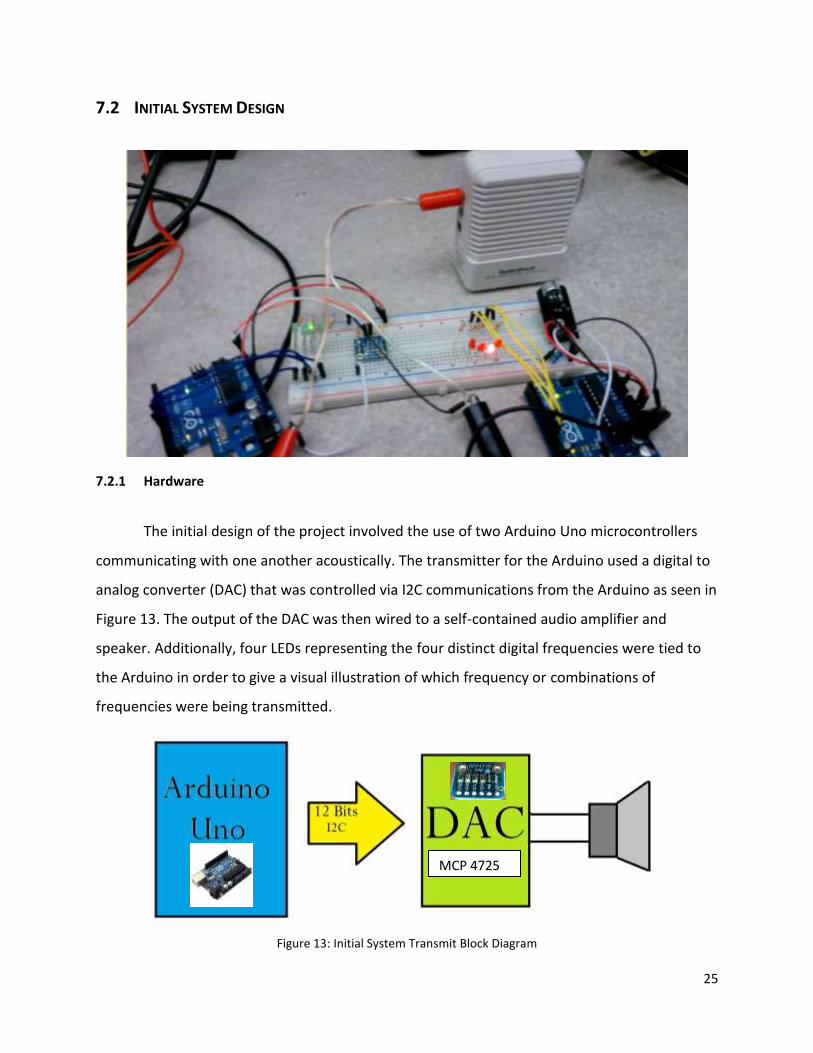
7.2.1 Hardware
The initial design of the project involved the use of two Arduino Uno microcontrollers
communicating with one another acoustically. The transmitter for the Arduino used a digital to
analog converter (DAC) that was controlled via I2C communications from the Arduino as seen in
Figure 13. The output of the DAC was then wired to a self-contained audio amplifier and
speaker. Additionally, four LEDs representing the four distinct digital frequencies were tied to
the Arduino in order to give a visual illustration of which frequency or combinations of
frequencies were being transmitted.
Figure 13: Initial System Transmit Block Diagram
MCP 4725

26
The receiver was connected to a self-contained microphone chip as can be seen in Figure 14. It
also had 4 LEDs connected to it so that the frequencies that it had determined to be received
could be displayed. Additionally, the FFT’s performance could be monitored via USB connection
using USART serial communications protocols to a stand-alone laptop.
Figure 14: Initial System Receive Block Diagram
This setup was designed to be simple and low cost in order to prove or disprove that it was
possible to communicate acoustically between two Arduinos using multiple frequency shift
keying. Improvements to the hardware used were made after these initial experiments for the
final design. Primarily it was determined that the Arduino was not the correct platform for
audio transmission and the microphone assembly was not fully sufficient in measuring sound at
any distance greater than one foot.
7.2.2 Software
7.2.2.1 Transmitter
The transmitted waveform for each frequency variation was the result of a hard coded
array of voltage values for the DAC to transmit. The array voltage values were transmitted to
the DAC as digital representation at the fastest timer interrupt value possible. This timer
interrupt would only allow for the transmission of a maximum frequency of 4 kHz. The arrays
that represented signals with multiple component frequencies were built in Matlab. The arrays
Microphone Assembly

27
were then hardcoded in order to conserve processing power for the I2C communications. Had
the output voltage been calculated by using a sine function of the time in the timer interrupt
clock with the desired frequency, the processor would have been slowed down considerably.
Unfortunately even with these hard-coded arrays, this system performed extremely poorly due
to the distortion from the lagged voltage response of the DAC. Additionally, only a limited
number of arrays could be stored due to limitations of memory on the Arduino.
7.2.2.2 Receiver
The receiver software would simply poll the analog input pin at specific timer interrupts
in order to measure the voltage level. This voltage level would then be stored as a value in an
array. Once enough array samples were taken, the timer interrupt would stop. The FFT function
would be then called and an array of frequency bins would be returned. The software then
compared the bins of the desired frequencies to see if their threshold was high enough for it to
be a component frequency.
Figure 15: Arduino Receiver Algorithm
This FFT worked great on the Arduino as long as no more than 3 frequencies were combined
simultaneously. The overlaps of spectrums of closely related chords at 3 frequencies caused
severe issues for the device in the discernment of the command issued.
Array of
Samples Taken
FFT Performed
on Array FFT O/P Array
Converted into
Component
Frequencies
28
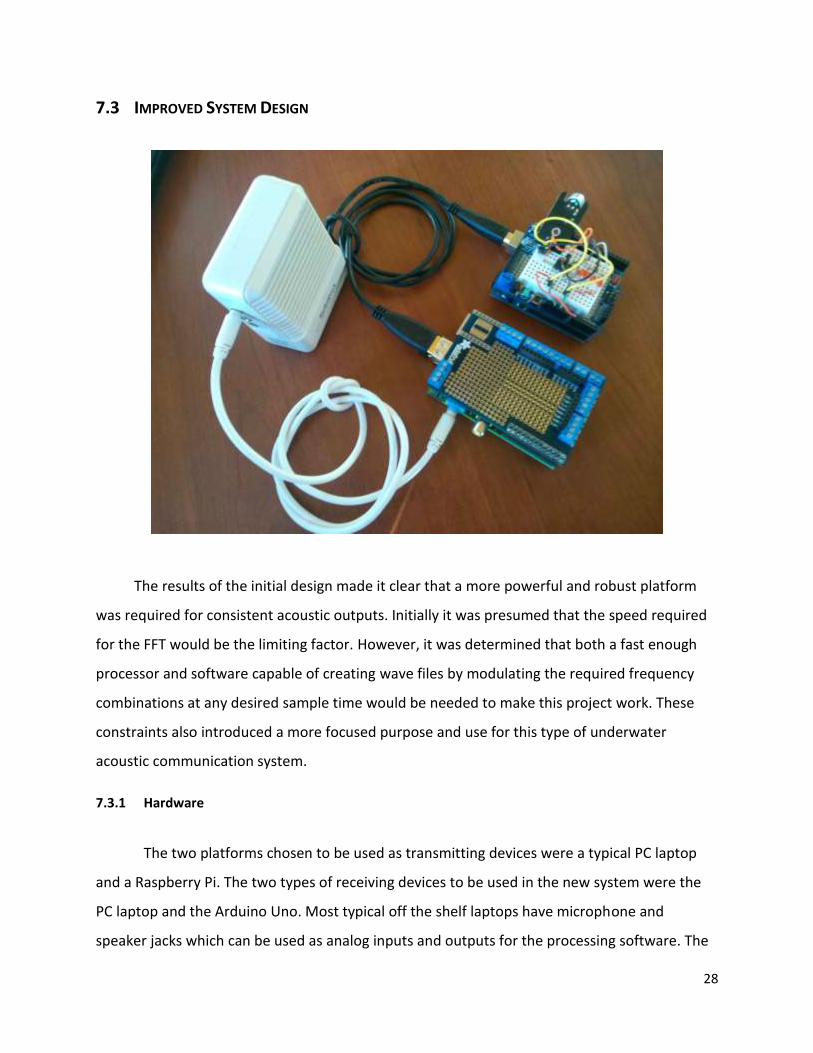
7.3 IMPROVED SYSTEM DESIGN
The results of the initial design made it clear that a more powerful and robust platform
was required for consistent acoustic outputs. Initially it was presumed that the speed required
for the FFT would be the limiting factor. However, it was determined that both a fast enough
processor and software capable of creating wave files by modulating the required frequency
combinations at any desired sample time would be needed to make this project work. These
constraints also introduced a more focused purpose and use for this type of underwater
acoustic communication system.
7.3.1 Hardware
The two platforms chosen to be used as transmitting devices were a typical PC laptop
and a Raspberry Pi. The two types of receiving devices to be used in the new system were the
PC laptop and the Arduino Uno. Most typical off the shelf laptops have microphone and
speaker jacks which can be used as analog inputs and outputs for the processing software. The

29
Raspberry Pi also comes equipped with an audio output jack for easy integration with an
underwater speaker. The Pi, however, does not have any analog inputs and therefore requires
the integration of an Arduino Uno for bi-directional communication to take place. The laptop
interface is designed for onshore or shipboard communication with remote subsea devices.
One application for the laptop is to send a broadcast signal to slave Arduino Uno’s controlling
either electronic or electro-mechanical devices such as valves, telecommunication switches, or
actuating inflatable lift bags for subsea instrumentation and equipment.
Figure 16: Applications of System Design
Another application for this system is the bidirectional communication with a Raspberry Pi link
via USB with an Arduino Uno. The laptop could issue a command for the Pi to transmit the
result of the data it has collected over the past week. As can be seen in the software section of
this report, the Laptop then converts the return acoustic transmission from the Pi into a text
file. Additionally, the system has the capability to issue a command to the Pi to transmit various
combinations of frequencies in a predictive manner so that the frequency response of the
medium in which the communication is taking place can be measured.
Laptop
Arduino
Uno
Laptop Laptop
Raspberry Pi
Arduino
Uno
Arduino
Uno
Arduino
Uno
30
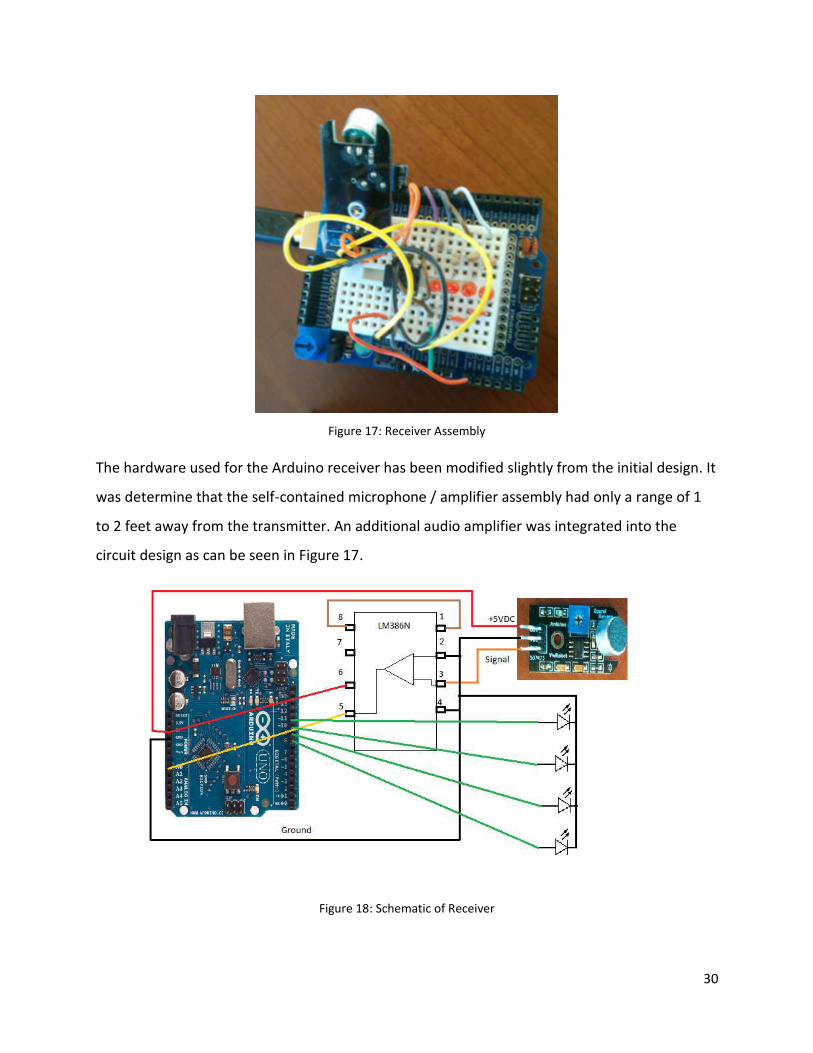
Figure 17: Receiver Assembly
The hardware used for the Arduino receiver has been modified slightly from the initial design. It
was determine that the self-contained microphone / amplifier assembly had only a range of 1
to 2 feet away from the transmitter. An additional audio amplifier was integrated into the
circuit design as can be seen in Figure 17.
Figure 18: Schematic of Receiver

31
This additional amplifier provided much better range as well as improved frequency
discrimination by the FFT.
7.3.2 Software
7.3.2.1 Laptop
The laptop incorporates the use of two separate programs running simultaneously with
one another while sharing a common text file and therefore was designed into two parts. The
signal processing of a received signal is done initially through the LabView Virtual Instrument I
developed. The instrument records acoustic data taken from the microphone jack on the laptop
via a subVI acquired online [14] and coverts it into an array.
Figure 19: LabView Virtual Instrument Signal Processing
This data is then processed via FFT and the spectral frequencies of the signals are then
displayed graphically at the user interface.

32
Figure 20: LabView Virtual Instrument User Interface
These values are then further filtered and conditioned into a usable collection of frequencies.
These frequencies are then recorded onto a log file which is then processed by the other
software. At the heart of this system’s design is the encoding, decoding, and transmitting
software. This software was written in Python due to its ease of incorporation into both a PC
Windows Operating System and the Linux based Debian Operating System for the Raspberry Pi.
Python also has a vast number of open source libraries for serial communications, construction
of wave files, and array manipulation. Most importantly, it is light enough to operate on a Pi
with less lag than that of C++. The main control software is composed of three parts: frequency
array mapping, byte to frequency encoding, wave file creation and playback, frequency to byte
decoding, and text file to byte conversion.
7.3.2.1.1 Frequency Array Mapping
Figure 21: Frequency Mapping Logic
Calculate
Array Size
Map
Frequency
Tags to
Array
k
N

33
The frequency array mapping function is the heart to this system. It is the function that
provides a map by which frequencies combinations are attributed to a decimal value. The
function builds a map from two inputs which are N and k. N is total the number desired
frequencies to be used in the system and k is maximum number of frequencies that can be
combined into one signal. The function first determines the maximum number of combinations
given N and k and then maps every permutation as an encoded integer value to a decimal index
term.
Table 4: Array Values for N=3 and k=3
The frequencies are spaced such that the maximum allowable N value is 999. For the purposes
of this project only 20 frequencies (N=20) with a maximum combination of 3 (k=3) were used.
The mathematical relationships of how the number of possible permutations can be calculated
are discussed in the section 8.1.2 of this paper. Additionally, a table showing that maximum
value for any set of k and N can be seen in the Appendix.
A[0] 000 000 000
A[1] 000 000 001
A[2] 000 000 002
A[3] 000 000 003
A[4] 000 002 001
A[5] 000 003 001
A[6] 000 003 002
k=3 A[7] 003 002 001
N = 3
k = 1
k = 2
34
7.3.2.1.2 User Interface
Figure 22: Command Software User Interface
There are four different user interface commands: Test Array, Arduino, Transmit, and
Receive. These commands are tied to functions that provide byte to frequency encoding and
wave file creation and playback, or frequency to byte decoding and/or text file to byte
conversion.
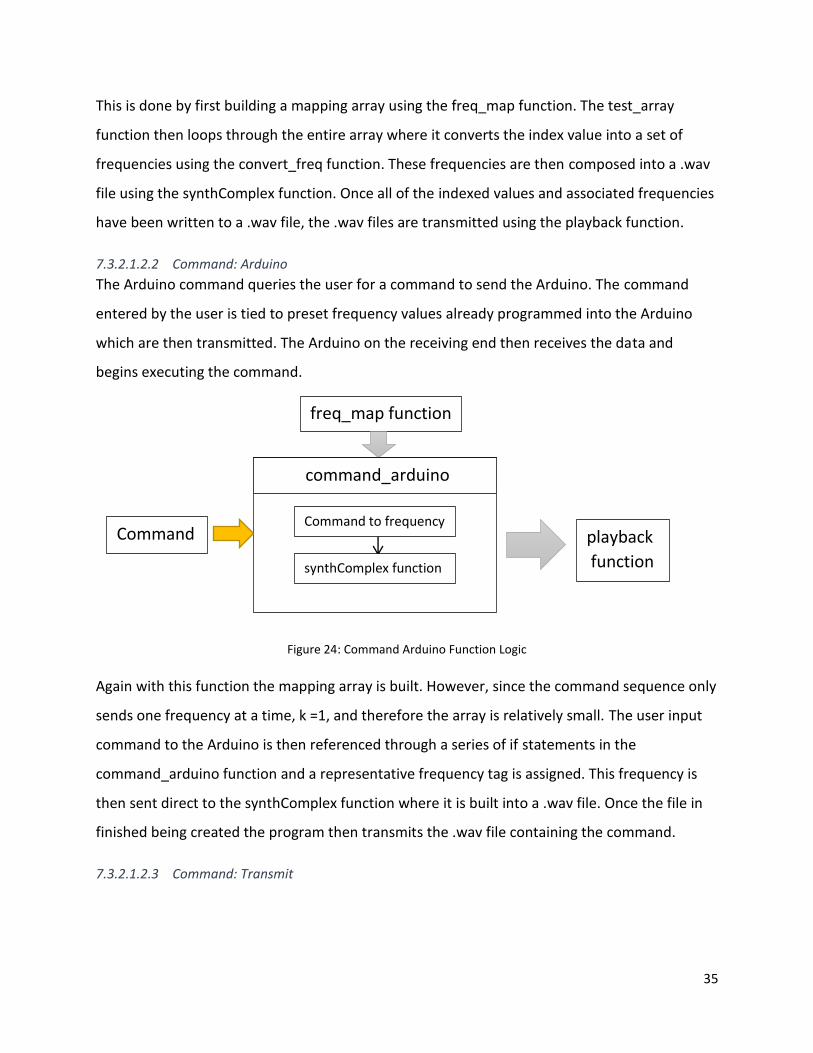
7.3.2.1.2.1 Command: Test Array
The Test Array command enables to the laptop to send out a signal which methodically steps
through every frequency that is pre-defined in the system at every possible permutations of
frequency combinations for a given maximum allowable frequencies per chord.
Figure 23: Frequency Mapping Logic
freq_map function
test_array function
freq_map array value
convert_freq function
synthComplex function
playback
function
35
This is done by first building a mapping array using the freq_map function. The test_array
function then loops through the entire array where it converts the index value into a set of
frequencies using the convert_freq function. These frequencies are then composed into a .wav
file using the synthComplex function. Once all of the indexed values and associated frequencies
have been written to a .wav file, the .wav files are transmitted using the playback function.
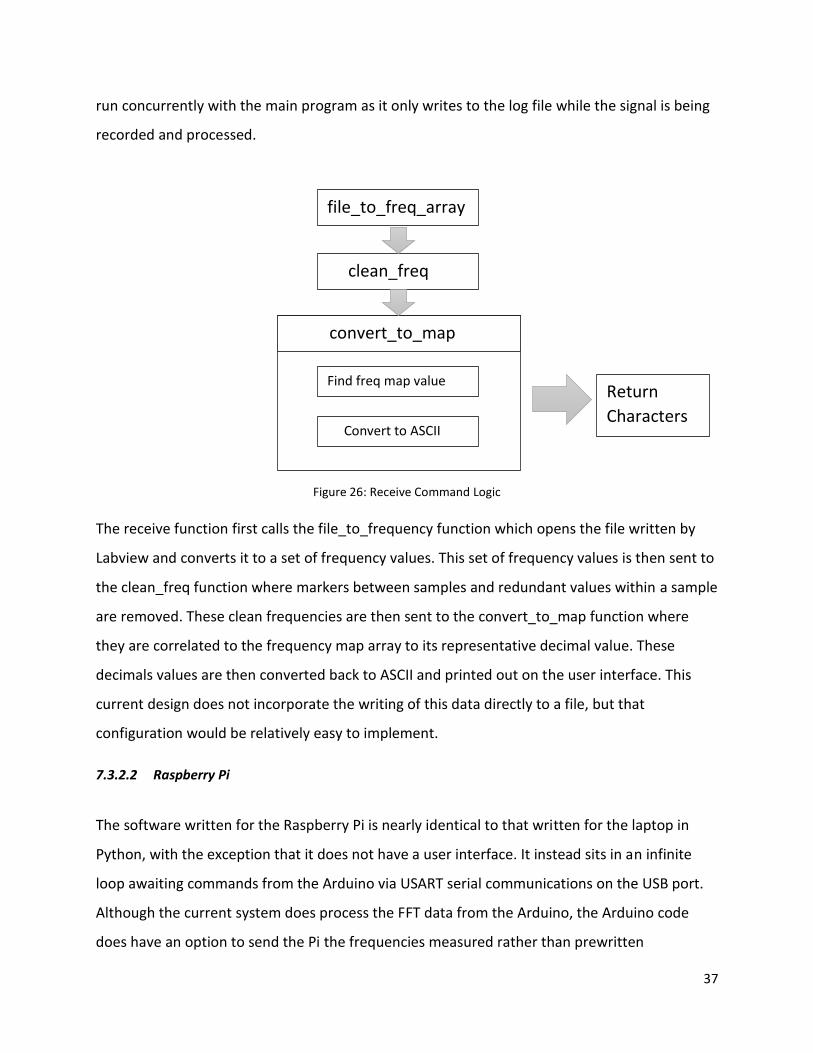
7.3.2.1.2.2 Command: Arduino
The Arduino command queries the user for a command to send the Arduino. The command
entered by the user is tied to preset frequency values already programmed into the Arduino
which are then transmitted. The Arduino on the receiving end then receives the data and
begins executing the command.
Figure 24: Command Arduino Function Logic
Again with this function the mapping array is built. However, since the command sequence only
sends one frequency at a time, k =1, and therefore the array is relatively small. The user input
command to the Arduino is then referenced through a series of if statements in the
command_arduino function and a representative frequency tag is assigned. This frequency is
then sent direct to the synthComplex function where it is built into a .wav file. Once the file in
finished being created the program then transmits the .wav file containing the command.
7.3.2.1.2.3 Command: Transmit
freq_map function
playback
function
Command
command_arduino
function Command to frequency
synthComplex function

36
The transmit command is used to convert a text file into a wave file and then transmit to a
receiving device.
Figure 25: Transmit Command Logic
The transmit command also first builds an array of frequency value using the freq_map. The
current default setting for this function is N=20 and k=3. The file_to_wave function is then
called which systematically reads each line of text from the text file, converts each character
into hex then decimal, references the frequency values for that decimal index, and sends the
corresponding frequency values to the synthComplex function where it is converted into a .wav
file. Once, the function has fully converted the document to .wav file, the playback function is
then called in order to transmit the data.
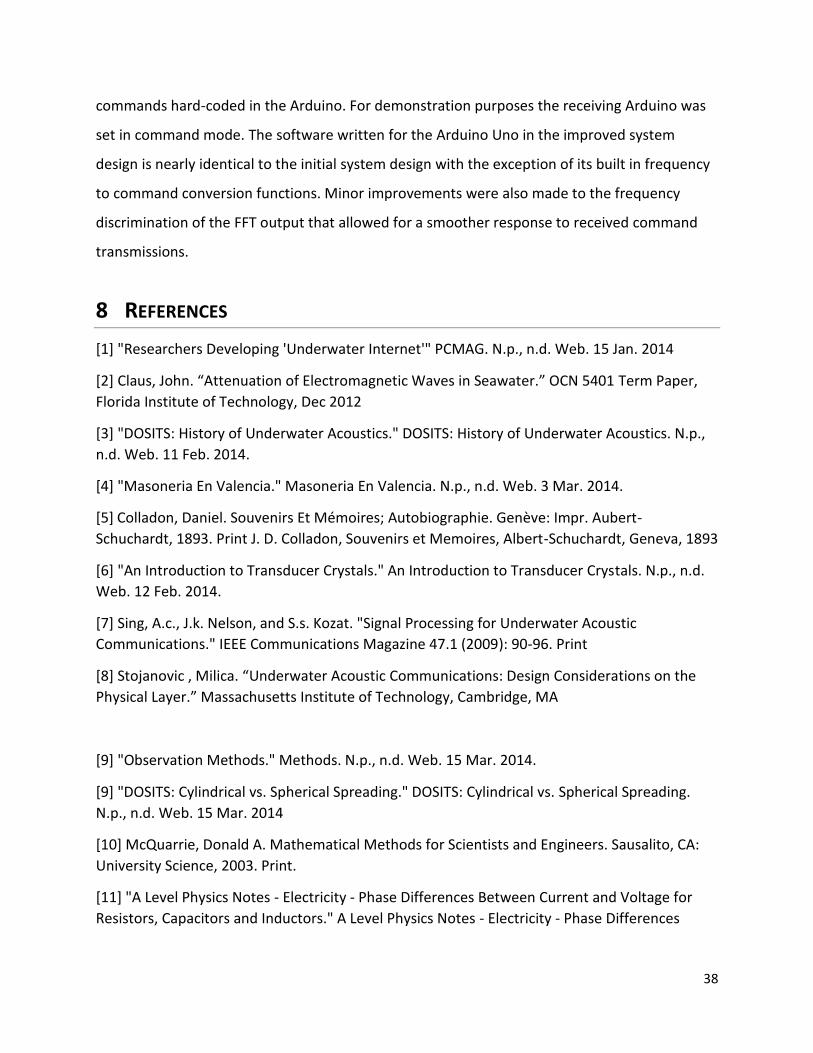
7.3.2.1.2.4 Command: Receive
This command reads a software specific log file written either by Labview which contains
frequency values from a received signal. The incoming acoustic signal should have already been
recorded and processed by the Labview software before this command is given. Labview can
freq_map function
synthComplex function
convert_freq function
Find freq_map value
Convert to decimal
Read text from the file
file_to_wave function
playback
function Text File
37
run concurrently with the main program as it only writes to the log file while the signal is being
recorded and processed.
Figure 26: Receive Command Logic
The receive function first calls the file_to_frequency function which opens the file written by
Labview and converts it to a set of frequency values. This set of frequency values is then sent to
the clean_freq function where markers between samples and redundant values within a sample
are removed. These clean frequencies are then sent to the convert_to_map function where
they are correlated to the frequency map array to its representative decimal value. These
decimals values are then converted back to ASCII and printed out on the user interface. This
current design does not incorporate the writing of this data directly to a file, but that
configuration would be relatively easy to implement.
7.3.2.2 Raspberry Pi
The software written for the Raspberry Pi is nearly identical to that written for the laptop in
Python, with the exception that it does not have a user interface. It instead sits in an infinite
loop awaiting commands from the Arduino via USART serial communications on the USB port.
Although the current system does process the FFT data from the Arduino, the Arduino code
does have an option to send the Pi the frequencies measured rather than prewritten
file_to_freq_array
clean_freq
convert_to_map
Find freq map value
Convert to ASCII
Return
Characters
38
commands hard-coded in the Arduino. For demonstration purposes the receiving Arduino was
set in command mode. The software written for the Arduino Uno in the improved system
design is nearly identical to the initial system design with the exception of its built in frequency
to command conversion functions. Minor improvements were also made to the frequency
discrimination of the FFT output that allowed for a smoother response to received command
transmissions.
8 REFERENCES
[1] "Researchers Developing 'Underwater Internet'" PCMAG. N.p., n.d. Web. 15 Jan. 2014
[2] Claus, John. “Attenuation of Electromagnetic Waves in Seawater.” OCN 5401 Term Paper,
Florida Institute of Technology, Dec 2012
[3] "DOSITS: History of Underwater Acoustics." DOSITS: History of Underwater Acoustics. N.p.,
n.d. Web. 11 Feb. 2014.
[4] "Masoneria En Valencia." Masoneria En Valencia. N.p., n.d. Web. 3 Mar. 2014.
[5] Colladon, Daniel. Souvenirs Et M moires Autobiographie. en ve: Impr. Aubert-
Schuchardt, 1893. Print J. D. Colladon, Souvenirs et Memoires, Albert-Schuchardt, Geneva, 1893
[6] "An Introduction to Transducer Crystals." An Introduction to Transducer Crystals. N.p., n.d.
Web. 12 Feb. 2014.
[7] Sing, A.c., J.k. Nelson, and S.s. Kozat. "Signal Processing for Underwater Acoustic
Communications." IEEE Communications Magazine 47.1 (2009): 90-96. Print
[8] Stojanovic , Milica. “Underwater Acoustic Communications: Design Considerations on the
Physical Layer.” Massachusetts Institute of Technology, Cambridge, MA
[9] "Observation Methods." Methods. N.p., n.d. Web. 15 Mar. 2014.
[9] "DOSITS: Cylindrical vs. Spherical Spreading." DOSITS: Cylindrical vs. Spherical Spreading.
N.p., n.d. Web. 15 Mar. 2014
[10] McQuarrie, Donald A. Mathematical Methods for Scientists and Engineers. Sausalito, CA:
University Science, 2003. Print.
[11] "A Level Physics Notes - Electricity - Phase Differences Between Current and Voltage for
Resistors, Capacitors and Inductors." A Level Physics Notes - Electricity - Phase Differences

39
Between Current and Voltage for Resistors, Capacitors and Inductors. N.p., n.d. Web. 18 Mar.
2014.
[12] Oppenheim, Alan V., and Ronald W. Schafer. Discrete-time Signal Processing. London:
Prentice-Hall, 1989. Print.
9 APPENDICES
9.1 PYTHON CODE
9.1.1 Shared Main
40
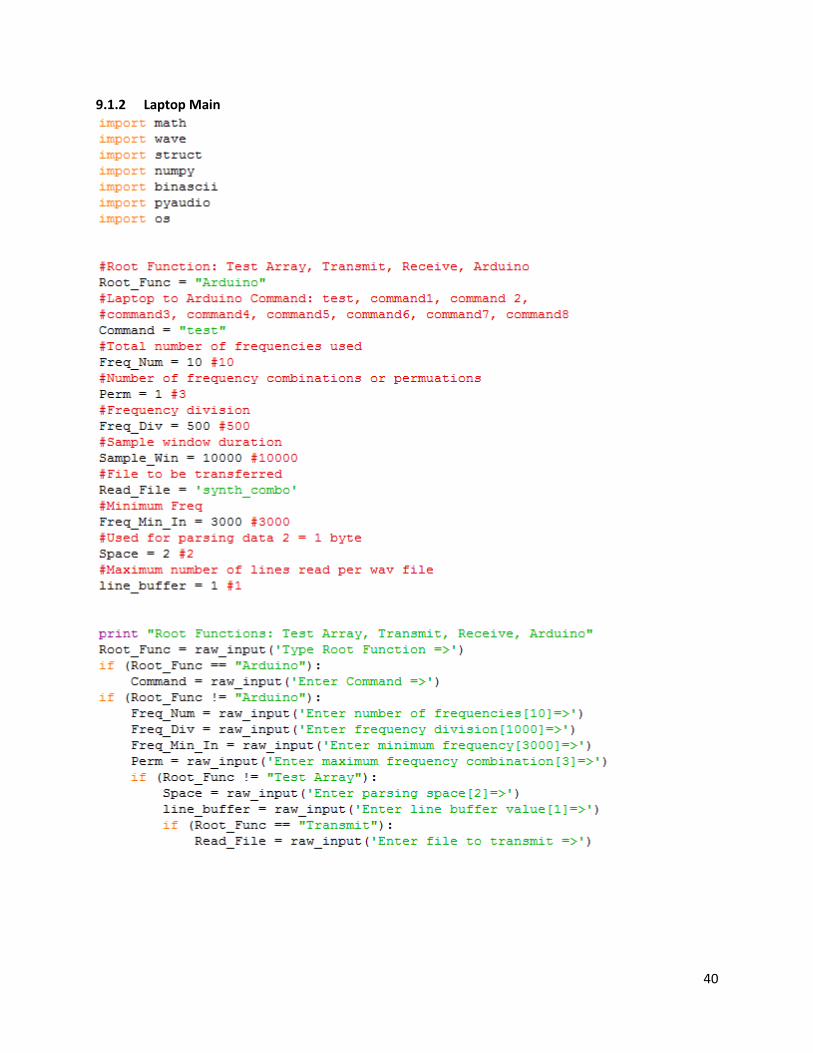
9.1.2 Laptop Main

41
9.1.3 Raspberry Pi Main

42
9.1.4 freq_map function

43
9.1.5 synthComplex function

44
9.1.6 convert_freq function
45
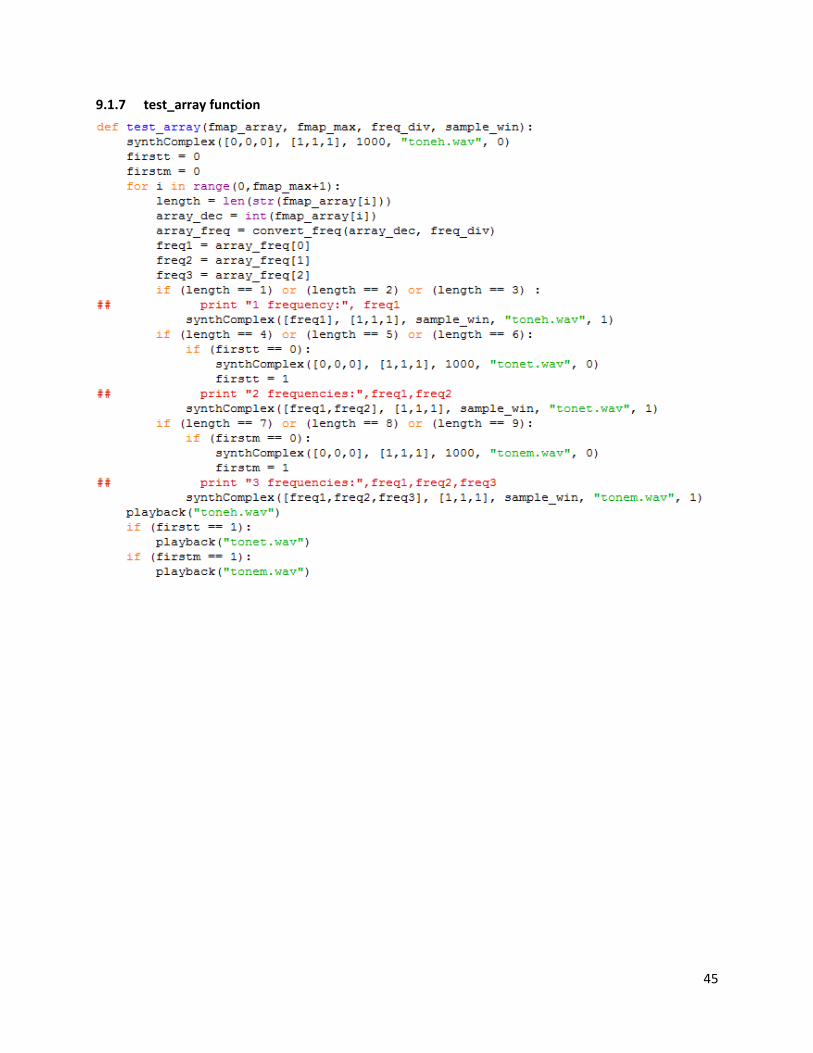
9.1.7 test_array function
46
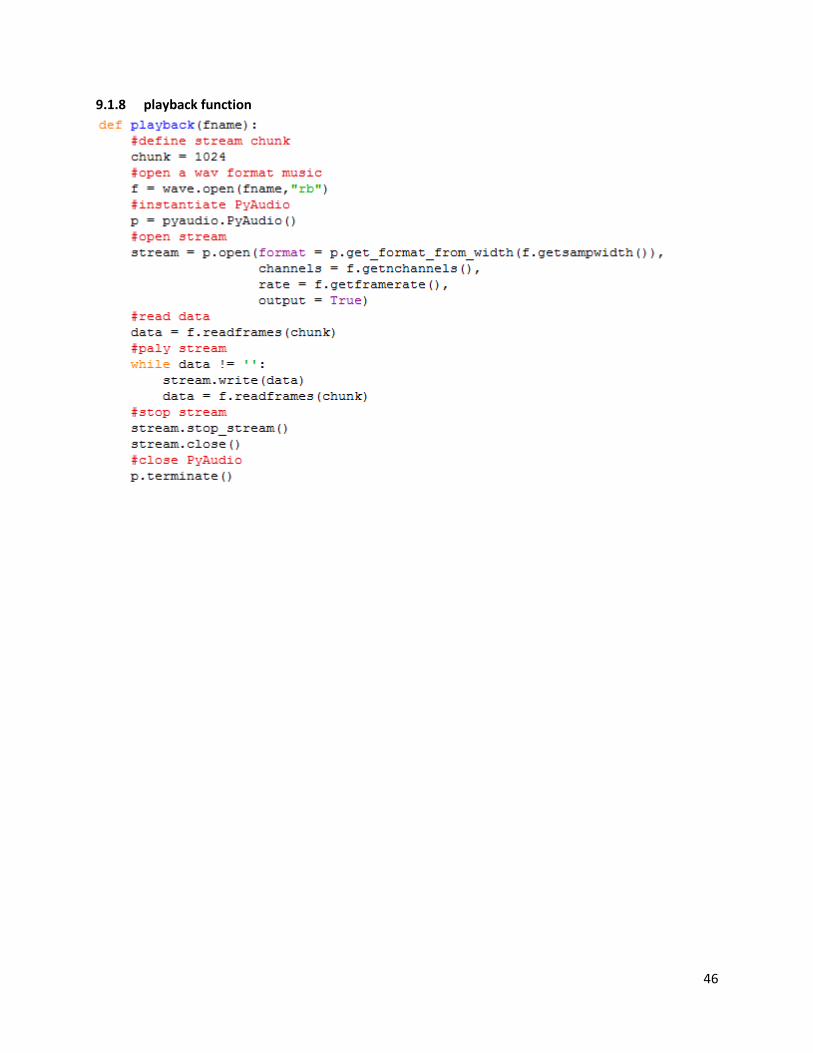
9.1.8 playback function

47
9.1.9 file_to_wave function
9.1.10 file_to_freq_array function

48
9.1.11 clean_freq function
49
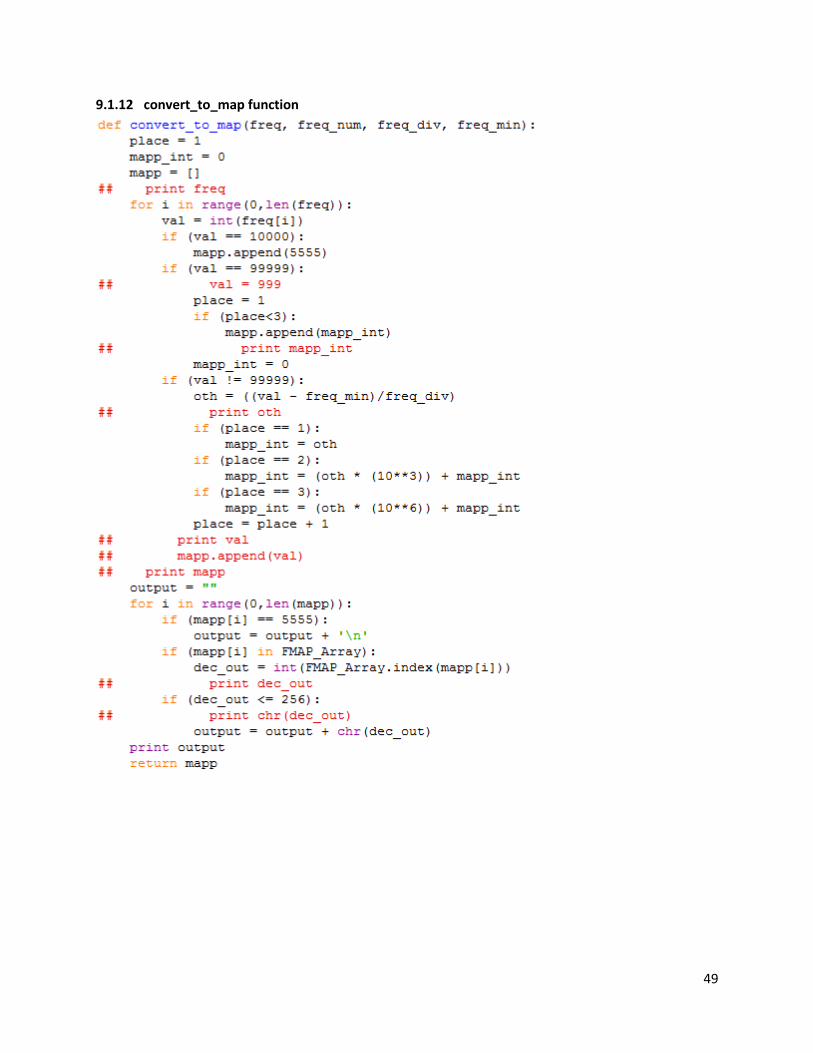
9.1.12 convert_to_map function

50
9.1.13 command_arduino function
9.2 ARDUINO CODE
9.2.1 Receiver
#include "fix_fft.h"
char im[256];
char data[256];
float freq_min = 500;
float freq_div = 1000;
int send_freq = 0;
int bin = 0;

51
int bin_min;
int bin_div;
int count = 0;
int freq = 0;
int threshold = 5;
void command1(){
if (send_freq == 0) Serial.println("command1");
digitalWrite(8, HIGH);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
}
void command2(){
if (send_freq == 0) Serial.println("command2");
digitalWrite(8, LOW);
digitalWrite(9, HIGH);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
}
void command3(){
if (send_freq == 0) Serial.println("command3");
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, HIGH);
digitalWrite(11, LOW);
}
void command4(){

52
if (send_freq == 0) Serial.println("command4");
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, HIGH);
}
void command5(){
if (send_freq == 0) Serial.println("command5");
digitalWrite(8, LOW);
digitalWrite(9, HIGH);
digitalWrite(10, LOW);
digitalWrite(11, HIGH);
}
void command6(){
if (send_freq == 0) Serial.println("command6");
digitalWrite(8, HIGH);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, HIGH);
}
void command7(){
if (send_freq == 0) Serial.println("command7");
digitalWrite(8, LOW);
digitalWrite(9, HIGH);
digitalWrite(10, HIGH);
digitalWrite(11, LOW);
}
void command8(){
if (send_freq == 0) Serial.println("command8");
53
digitalWrite(8, HIGH);
digitalWrite(9, HIGH);
digitalWrite(10, HIGH);
digitalWrite(11, HIGH);
}
void commandoff(){
if (send_freq == 0) Serial.println("commandoff");
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
}
void setup(){
Serial.begin(9600);
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
bin_min = int(((-0.003)*freq_min)+63.5);
bin_div = int(freq_div/333);
Serial.println(bin_min);
Serial.println(bin_div);
}
void loop(){

54
int static i = 0;
static long tt;
int val;
if (millis() > tt){
if (i < 128){
val = analogRead(1)*2 -128;
//Serial.print(val);
//Serial.print(" ");
data[i] = val;
im[i] = 0;
i++;
}
else{
fix_fft(data,im,7,0);
for (i=0; i< 64;i++){
//Serial.print(data[i], DEC);
//Serial.print(" ");
data[i] = sqrt(data[i] * data[i] + im[i] * im[i]);
//if (data[i] > threshold)
//Serial.print(i,DEC);
//Serial.print(data[i], DEC);
//Serial.print(" ");
if (send_freq == 1)
{
if (data[i] > threshold)
freq = int((-333.33*i)+21166.7);
Serial.println(freq);
}
}
55
if (send_freq == 1) Serial.println("###########");
if (data[bin_min] >= threshold) command1();
else if (data[bin_min-(bin_div)] >= threshold)
{
command2();
count = 0;
}
else if (data[bin_min-(2*bin_div)] >= threshold)
{
command3();
count = 0;
}
else if (data[bin_min-(3*bin_div)] >= threshold)
{
command4();
count = 0;
}
else if (data[bin_min-(4*bin_div)] >= threshold)
{
command5();
count = 0;
}
else if (data[bin_min-(5*bin_div)] >= threshold)
{
command6();
count = 0;
}
else if (data[bin_min-(6*bin_div)] >= threshold)
56
{
command7();
count = 0;
}
else if (data[bin_min-(7*bin_div)] >= threshold)
{
command8();
count = 0;
}
else
{
count = count + 1;
if (count > 2) commandoff();
}
}
tt = millis();
}
}
9.2.2 Transmitter
#include <Wire.h>
#include <Adafruit_MCP4725.h>
Adafruit_MCP4725 dac;
int wait_in = 10000;
int wait = 0;
int count = 0;
int led1 = 8;

57
int led2 = 9;
int led3 = 10;
int led4 = 11;
int DAC_Command = 1;
int n = 1;
PROGMEM uint16_t DAC_4321[16] =
{
2094, 2139, 2967, 1393,
2606, 1693, 1944, 392,
2094, 1748, 2244, 447,
1582, 747, 1220, 0
};
PROGMEM uint16_t DAC_432[16] =
{
1070, 2139, 1944, 1393,
1582, 1693, 920, 392,
1070, 1748, 1220, 447,
558, 747, 196, 0
};
PROGMEM uint16_t DAC_431[16] =
{
1859, 1393, 2732, 1670,
2371, 946, 1709, 669,
1859, 1001, 2009, 724,
1347, 0, 985, 277

58
};
PROGMEM uint16_t DAC_421[16] =
{
2009, 1693, 2371, 946,
2521, 1970, 2371, 669,
2009, 1301, 1647, 0,
1497, 1024, 1647, 277
};
PROGMEM uint16_t DAC_43[16] =
{
874, 1432, 1748, 1709,
1386, 985, 724, 708,
874, 1040, 1024, 763,
362, 39, 0, 316
};
PROGMEM uint16_t DAC_42[16] =
{
985, 1693, 1347, 946,
1497, 1970, 1347, 669,
985, 1301, 623, 0,
473, 1024, 623, 277,
};
PROGMEM uint16_t DAC_41[16] =
{
1497, 669, 1859, 946,
59
2009, 946, 1859, 669,
1497, 277, 1135, 0,
985, 0, 1135, 277,
};
PROGMEM uint16_t DAC_321[16] =
{
1898, 1748, 2410, 724,
1898, 1024, 1386, 0,
1898, 1748, 2410, 724,
1898, 1024, 1386, 0
};
PROGMEM uint16_t DAC_32[16] =
{
874, 1748, 1386, 724,
874, 1024, 362, 0,
874, 1748, 1386, 724,
874, 1024, 362, 0
};
PROGMEM uint16_t DAC_31[16] =
{
1386, 724, 1898, 724,
1386, 0, 874, 0,
1386, 724, 1898, 724,
1386, 0, 874, 0
};
60
PROGMEM uint16_t DAC_21[16] =
{
1536, 1024, 1536, 0,
1536, 1024, 1536, 0,
1536, 1024, 1536, 0,
1536, 1024, 1536, 0
};
PROGMEM uint16_t DAC_4[16] =
{
2048, 2831, 3495, 3939,
4095, 3939, 3495, 2831,
2048, 1264, 600, 156,
0, 156, 600, 1264
};
PROGMEM uint16_t DAC_3[8] =
{
600, 2048, 3495, 4095,
3495, 2048, 600, 0
};
PROGMEM uint16_t DAC_2[4] =
{
2048, 4095, 2048, 0
};
PROGMEM uint16_t DAC_1[2] =
{
61
4095, 0
};
void setup(void)
{
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(led3, OUTPUT);
pinMode(led4, OUTPUT);
dac.begin(0x62);
}
void loop(void) {
DAC_Command = n;
if (DAC_Command == 2) wait = 2*wait_in;
else if (DAC_Command == 4) wait = 4*wait_in;
else if (DAC_Command == 8) wait = 8*wait_in;
else wait = wait_in;
if (count == wait)
{
n = n + 1;
count = 0;
}
if (n == 16) n = 0;
count = count + 1;
uint16_t i;
if (DAC_Command == 15)
{

62
digitalWrite(led1, HIGH);
digitalWrite(led2, HIGH);
digitalWrite(led3, HIGH);
digitalWrite(led4, HIGH);
for (i = 0; i < 16; i++)
{
dac.setVoltage(pgm_read_word(&(DAC_4321[i])), false);
}
}
if (DAC_Command == 14)
{
digitalWrite(led1, HIGH);
digitalWrite(led2, HIGH);
digitalWrite(led3, HIGH);
digitalWrite(led4, LOW);
for (i = 0; i < 16; i++)
{
dac.setVoltage(pgm_read_word(&(DAC_321[i])), false);
}
}
if (DAC_Command == 13)
{
digitalWrite(led1, HIGH);
digitalWrite(led2, HIGH);
digitalWrite(led3, LOW);
digitalWrite(led4, HIGH);
for (i = 0; i < 16; i++)
{
dac.setVoltage(pgm_read_word(&(DAC_421[i])), false);
63
}
}
if (DAC_Command == 12)
{
digitalWrite(led1, HIGH);
digitalWrite(led2, HIGH);
digitalWrite(led3, LOW);
digitalWrite(led4, LOW);
for (i = 0; i < 16; i++)
{
dac.setVoltage(pgm_read_word(&(DAC_21[i])), false);
}
}
if (DAC_Command == 11)
{
digitalWrite(led1, HIGH);
digitalWrite(led2, LOW);
digitalWrite(led3, HIGH);
digitalWrite(led4, HIGH);
for (i = 0; i < 16; i++)
{
dac.setVoltage(pgm_read_word(&(DAC_431[i])), false);
}
}
if (DAC_Command == 10)
{
digitalWrite(led1, HIGH);
digitalWrite(led2, LOW);
digitalWrite(led3, HIGH);

64
digitalWrite(led4, LOW);
for (i = 0; i < 16; i++)
{
dac.setVoltage(pgm_read_word(&(DAC_31[i])), false);
}
}
if (DAC_Command == 9)
{
digitalWrite(led1, HIGH);
digitalWrite(led2, LOW);
digitalWrite(led3, LOW);
digitalWrite(led4, HIGH);
for (i = 0; i < 16; i++)
{
dac.setVoltage(pgm_read_word(&(DAC_41[i])), false);
}
}
if (DAC_Command == 8)
{
digitalWrite(led1, HIGH);
digitalWrite(led2, LOW);
digitalWrite(led3, LOW);
digitalWrite(led4, LOW);
for (i = 0; i < 2; i++)
{
dac.setVoltage(pgm_read_word(&(DAC_1[i])), false);
}
}
if (DAC_Command == 7)

65
{
digitalWrite(led1, LOW);
digitalWrite(led2, HIGH);
digitalWrite(led3, HIGH);
digitalWrite(led4, HIGH);
for (i = 0; i < 16; i++)
{
dac.setVoltage(pgm_read_word(&(DAC_432[i])), false);
}
}
if (DAC_Command == 6)
{
digitalWrite(led1, LOW);
digitalWrite(led2, HIGH);
digitalWrite(led3, HIGH);
digitalWrite(led4, LOW);
for (i = 0; i < 16; i++)
{
dac.setVoltage(pgm_read_word(&(DAC_32[i])), false);
}
}
if (DAC_Command == 5)
{
digitalWrite(led1, LOW);
digitalWrite(led2, HIGH);
digitalWrite(led3, LOW);
digitalWrite(led4, HIGH);
for (i = 0; i < 16; i++)
{

66
dac.setVoltage(pgm_read_word(&(DAC_42[i])), false);
}
}
if (DAC_Command == 4)
{
digitalWrite(led1, LOW);
digitalWrite(led2, HIGH);
digitalWrite(led3, LOW);
digitalWrite(led4, LOW);
for (i = 0; i < 4; i++)
{
dac.setVoltage(pgm_read_word(&(DAC_2[i])), false);
}
}
if (DAC_Command == 3)
{
digitalWrite(led1, LOW);
digitalWrite(led2, LOW);
digitalWrite(led3, HIGH);
digitalWrite(led4, HIGH);
for (i = 0; i < 16; i++)
{
dac.setVoltage(pgm_read_word(&(DAC_43[i])), false);
}
}
if (DAC_Command == 2)
{
digitalWrite(led1, LOW);
digitalWrite(led2, LOW);

67
digitalWrite(led3, HIGH);
digitalWrite(led4, LOW);
for (i = 0; i < 8; i++)
{
dac.setVoltage(pgm_read_word(&(DAC_3[i])), false);
}
}
if (DAC_Command == 1)
{
digitalWrite(led1, LOW);
digitalWrite(led2, LOW);
digitalWrite(led3, LOW);
digitalWrite(led4, HIGH);
for (i = 0; i < 16; i++)
{
dac.setVoltage(pgm_read_word(&(DAC_4[i])), false);
}
}
else
{
digitalWrite(led1, LOW);
digitalWrite(led2, LOW);
digitalWrite(led3, LOW);
digitalWrite(led4, LOW);
dac.setVoltage(0, false);
}
}
9.2.3 FFT Library
68
9.2.3.1 fix_fft.cpp
#include <avr/pgmspace.h>
#include "fix_fft.h"
//#include <WProgram.h>
/* fix_fft.c - Fixed-point in-place Fast Fourier Transform */
/*
All data are fixed-point short integers, in which -32768
to +32768 represent -1.0 to +1.0 respectively. Integer
arithmetic is used for speed, instead of the more natural
floating-point.
For the forward FFT (time -> freq), fixed scaling is
performed to prevent arithmetic overflow, and to map a 0dB
sine/cosine wave (i.e. amplitude = 32767) to two -6dB freq
coefficients. The return value is always 0.
For the inverse FFT (freq -> time), fixed scaling cannot be
done, as two 0dB coefficients would sum to a peak amplitude
of 64K, overflowing the 32k range of the fixed-point integers.
Thus, the fix_fft() routine performs variable scaling, and
returns a value which is the number of bits LEFT by which
the output must be shifted to get the actual amplitude
(i.e. if fix_fft() returns 3, each value of fr[] and fi[]
must be multiplied by 8 (2**3) for proper scaling.
Clearly, this cannot be done within fixed-point short
integers. In practice, if the result is to be used as a
filter, the scale_shift can usually be ignored, as the
result will be approximately correctly normalized as is.
Written by: Tom Roberts 11/8/89
Made portable: Malcolm Slaney 12/15/94 [email protected]
Enhanced: Dimitrios P. Bouras 14 Jun 2006 [email protected]
Modified for 8bit values David Keller 10.10.2010
*/
#define N_WAVE 256 /* full length of Sinewave[] */
#define LOG2_N_WAVE 8 /* log2(N_WAVE) */
/*
Since we only use 3/4 of N_WAVE, we define only
this many samples, in order to conserve data space.
*/

69
const prog_int8_t Sinewave[N_WAVE-N_WAVE/4] PROGMEM = {
0, 3, 6, 9, 12, 15, 18, 21,
24, 28, 31, 34, 37, 40, 43, 46,
48, 51, 54, 57, 60, 63, 65, 68,
71, 73, 76, 78, 81, 83, 85, 88,
90, 92, 94, 96, 98, 100, 102, 104,
106, 108, 109, 111, 112, 114, 115, 117,
118, 119, 120, 121, 122, 123, 124, 124,
125, 126, 126, 127, 127, 127, 127, 127,
127, 127, 127, 127, 127, 127, 126, 126,
125, 124, 124, 123, 122, 121, 120, 119,
118, 117, 115, 114, 112, 111, 109, 108,
106, 104, 102, 100, 98, 96, 94, 92,
90, 88, 85, 83, 81, 78, 76, 73,
71, 68, 65, 63, 60, 57, 54, 51,
48, 46, 43, 40, 37, 34, 31, 28,
24, 21, 18, 15, 12, 9, 6, 3,
0, -3, -6, -9, -12, -15, -18, -21,
-24, -28, -31, -34, -37, -40, -43, -46,
-48, -51, -54, -57, -60, -63, -65, -68,
-71, -73, -76, -78, -81, -83, -85, -88,
-90, -92, -94, -96, -98, -100, -102, -104,
-106, -108, -109, -111, -112, -114, -115, -117,
-118, -119, -120, -121, -122, -123, -124, -124,
-125, -126, -126, -127, -127, -127, -127, -127,
/*-127, -127, -127, -127, -127, -127, -126, -126,
-125, -124, -124, -123, -122, -121, -120, -119,
-118, -117, -115, -114, -112, -111, -109, -108,
-106, -104, -102, -100, -98, -96, -94, -92,
-90, -88, -85, -83, -81, -78, -76, -73,
-71, -68, -65, -63, -60, -57, -54, -51,
-48, -46, -43, -40, -37, -34, -31, -28,
-24, -21, -18, -15, -12, -9, -6, -3, */
};
/*
FIX_MPY() - fixed-point multiplication & scaling.
Substitute inline assembly for hardware-specific
optimization suited to a particluar DSP processor.
Scaling ensures that result remains 16-bit.
*/
inline char FIX_MPY(char a, char b)
{
70
//Serial.println(a);
//Serial.println(b);
/* shift right one less bit (i.e. 15-1) */
int c = ((int)a * (int)b) >> 6;
/* last bit shifted out = rounding-bit */
b = c & 0x01;
/* last shift + rounding bit */
a = (c >> 1) + b;
/*
Serial.println(Sinewave[3]);
Serial.println(c);
Serial.println(a);
while(1);*/
return a;
}
/*
fix_fft() - perform forward/inverse fast Fourier transform.
fr[n],fi[n] are real and imaginary arrays, both INPUT AND
RESULT (in-place FFT), with 0 <= n < 2**m; set inverse to
0 for forward transform (FFT), or 1 for iFFT.
*/
int fix_fft(char fr[], char fi[], int m, int inverse)
{
int mr, nn, i, j, l, k, istep, n, scale, shift;
char qr, qi, tr, ti, wr, wi;
n = 1 << m;
/* max FFT size = N_WAVE */
if (n > N_WAVE)
return -1;
mr = 0;
nn = n - 1;
scale = 0;
/* decimation in time - re-order data */
for (m=1; m<=nn; ++m) {
l = n;
do {
l >>= 1;
} while (mr+l > nn);
mr = (mr & (l-1)) + l;
if (mr <= m)
continue;
tr = fr[m];
71
fr[m] = fr[mr];
fr[mr] = tr;
ti = fi[m];
fi[m] = fi[mr];
fi[mr] = ti;
}
l = 1;
k = LOG2_N_WAVE-1;
while (l < n) {
if (inverse) {
/* variable scaling, depending upon data */
shift = 0;
for (i=0; i<n; ++i) {
j = fr[i];
if (j < 0)
j = -j;
m = fi[i];
if (m < 0)
m = -m;
if (j > 16383 || m > 16383) {
shift = 1;
break;
}
}
if (shift)
++scale;
} else {
/*
fixed scaling, for proper normalization --
there will be log2(n) passes, so this results
in an overall factor of 1/n, distributed to
maximize arithmetic accuracy.
*/
shift = 1;
}
/*
it may not be obvious, but the shift will be
performed on each data point exactly once,
during this pass.
*/
istep = l << 1;
for (m=0; m<l; ++m) {
j = m << k;
/* 0 <= j < N_WAVE/2 */
wr = pgm_read_word_near(Sinewave + j+N_WAVE/4);
/*Serial.println("asdfasdf");
Serial.println(wr);
Serial.println(j+N_WAVE/4);
Serial.println(Sinewave[256]);
72
Serial.println("");*/
wi = -pgm_read_word_near(Sinewave + j);
if (inverse)
wi = -wi;
if (shift) {
wr >>= 1;
wi >>= 1;
}
for (i=m; i<n; i+=istep) {
j = i + l;
tr = FIX_MPY(wr,fr[j]) - FIX_MPY(wi,fi[j]);
ti = FIX_MPY(wr,fi[j]) + FIX_MPY(wi,fr[j]);
qr = fr[i];
qi = fi[i];
if (shift) {
qr >>= 1;
qi >>= 1;
}
fr[j] = qr - tr;
fi[j] = qi - ti;
fr[i] = qr + tr;
fi[i] = qi + ti;
}
}
--k;
l = istep;
}
return scale;
}
/*
fix_fftr() - forward/inverse FFT on array of real numbers.
Real FFT/iFFT using half-size complex FFT by distributing
even/odd samples into real/imaginary arrays respectively.
In order to save data space (i.e. to avoid two arrays, one
for real, one for imaginary samples), we proceed in the
following two steps: a) samples are rearranged in the real
array so that all even samples are in places 0-(N/2-1) and
all imaginary samples in places (N/2)-(N-1), and b) fix_fft
is called with fr and fi pointing to index 0 and index N/2
respectively in the original array. The above guarantees
that fix_fft "sees" consecutive real samples as alternating
real and imaginary samples in the complex array.
*/
int fix_fftr(char f[], int m, int inverse)
{
int i, N = 1<<(m-1), scale = 0;
char tt, *fr=f, *fi=&f[N];
if (inverse)

73
scale = fix_fft(fi, fr, m-1, inverse);
for (i=1; i<N; i+=2) {
tt = f[N+i-1];
f[N+i-1] = f[i];
f[i] = tt;
}
if (! inverse)
scale = fix_fft(fi, fr, m-1, inverse);
return scale;
}
9.2.3.2 fix_fft.h
#ifndef FIXFFT_H
#define FIXFFT_H
//#include <WProgram.h>
/*
fix_fft() - perform forward/inverse fast Fourier transform.
fr[n],fi[n] are real and imaginary arrays, both INPUT AND
RESULT (in-place FFT), with 0 <= n < 2**m; set inverse to
0 for forward transform (FFT), or 1 for iFFT.
*/
int fix_fft(char fr[], char fi[], int m, int inverse);
/*
fix_fftr() - forward/inverse FFT on array of real numbers.

74
Real FFT/iFFT using half-size complex FFT by distributing
even/odd samples into real/imaginary arrays respectively.
In order to save data space (i.e. to avoid two arrays, one
for real, one for imaginary samples), we proceed in the
following two steps: a) samples are rearranged in the real
array so that all even samples are in places 0-(N/2-1) and
all imaginary samples in places (N/2)-(N-1), and b) fix_fft
is called with fr and fi pointing to index 0 and index N/2
respectively in the original array. The above guarantees
that fix_fft "sees" consecutive real samples as alternating
real and imaginary samples in the complex array.
*/
int fix_fftr(char f[], int m, int inverse);
#endif

75
9.3 PERMUTATION MATRIX
Number of Frequencies Used (N)
1 2 3 4 5 6 7 8 9
2 1 3 6 10 15 21 28 36 45
3 1 3 7 14 25 41 63 92 129
4 1 3 7 15 30 56 98 162 255
5 1 3 7 15 31 62 119 218 381
6 1 3 7 15 31 63 126 246 465
7 1 3 7 15 31 63 127 254 501
8 1 3 7 15 31 63 127 255 510
9 1 3 7 15 31 63 127 255 511
10 1 3 7 15 31 63 127 255 511
11 1 3 7 15 31 63 127 255 511
12 1 3 7 15 31 63 127 255 511
13 1 3 7 15 31 63 127 255 511
14 1 3 7 15 31 63 127 255 511
15 1 3 7 15 31 63 127 255 511
16 1 3 7 15 31 63 127 255 511
17 1 3 7 15 31 63 127 255 511
18 1 3 7 15 31 63 127 255 511
19 1 3 7 15 31 63 127 255 511
20 1 3 7 15 31 63 127 255 511
21 1 3 7 15 31 63 127 255 511
22 1 3 7 15 31 63 127 255 511
23 1 3 7 15 31 63 127 255 511
24 1 3 7 15 31 63 127 255 511
25 1 3 7 15 31 63 127 255 511
26 1 3 7 15 31 63 127 255 511
27 1 3 7 15 31 63 127 255 511
28 1 3 7 15 31 63 127 255 511
29 1 3 7 15 31 63 127 255 511
30 1 3 7 15 31 63 127 255 511
31 1 3 7 15 31 63 127 255 511
32 1 3 7 15 31 63 127 255 511
33 1 3 7 15 31 63 127 255 511
34 1 3 7 15 31 63 127 255 511
35 1 3 7 15 31 63 127 255 511
36 1 3 7 15 31 63 127 255 511
37 1 3 7 15 31 63 127 255 511
38 1 3 7 15 31 63 127 255 511
39 1 3 7 15 31 63 127 255 511
40 1 3 7 15 31 63 127 255 511
41 1 3 7 15 31 63 127 255 511
42 1 3 7 15 31 63 127 255 511
43 1 3 7 15 31 63 127 255 511
44 1 3 7 15 31 63 127 255 511
45 1 3 7 15 31 63 127 255 511
46 1 3 7 15 31 63 127 255 511
47 1 3 7 15 31 63 127 255 511
48 1 3 7 15 31 63 127 255 511
49 1 3 7 15 31 63 127 255 511
50 1 3 7 15 31 63 127 255 511
Maxim
um
Fre
q C
om
b.
(K)

76
10 11 12 13 14 15 16 17 18 19 20 21
55 66 78 91 105 120 136 153 171 190 210 231
175 231 298 377 469 575 696 833 987 1159 1350 1561
385 561 793 1092 1470 1940 2516 3213 4047 5035 6195 7546
637 1023 1585 2379 3472 4943 6884 9401 12615 16663 21699 27895
847 1485 2509 4095 6475 9948 14892 21777 31179 43795 60459 82159
967 1815 3301 5811 9907 16383 26332 41225 63003 94183 137979 198439
1012 1980 3796 7098 12910 22818 39202 65535 106761 169765 263949 401929
1022 2035 4016 7813 14912 27823 50642 89845 155381 262143 431909 695859
1023 2046 4082 8099 15913 30826 58650 109293 199139 354521 616665 1048575
1023 2047 4094 8177 16277 32191 63018 121669 230963 430103 784625 1401291
1023 2047 4095 8190 16368 32646 64838 127857 249527 480491 910595 1695221
1023 2047 4095 8191 16382 32751 65398 130237 258095 507623 988115 1898711
1023 2047 4095 8191 16383 32766 65518 130917 261155 519251 1026875 2014991
1023 2047 4095 8191 16383 32767 65534 131053 261971 523127 1042379 2069255
1023 2047 4095 8191 16383 32767 65535 131070 262124 524096 1047224 2089604
1023 2047 4095 8191 16383 32767 65535 131071 262142 524267 1048364 2095589
1023 2047 4095 8191 16383 32767 65535 131071 262143 524286 1048554 2096919
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048574 2097129
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097150
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
1023 2047 4095 8191 16383 32767 65535 131071 262143 524287 1048575 2097151
77
22 23 24 25 26 27 28 29 30 31 32 33
253 276 300 325 351 378 406 435 465 496 528 561
1793 2047 2324 2625 2951 3303 3682 4089 4525 4991 5488 6017
9108 10902 12950 15275 17901 20853 24157 27840 31930 36456 41448 46937
35442 44551 55454 68405 83681 101583 122437 146595 174436 206367 242824 284273
110055 145498 190050 245505 313911 397593 499177 621615 768211 942648 1149016 1391841
280599 390655 536154 726205 971711 1285623 1683217 2182395 2804011 3572223 4514872 5663889
600369 880969 1271625 1807780 2533986 3505698 4791322 6474540 8656936 11460948 15033172 19548045
1097789 1698159 2579129 3850755 5658536 8192523 11698222 16489545 22964086 31621023 43081972 58115145
1744435 2842225 4540385 7119515 10970271 16628808 24821332 36519555 53009101 75973188 1.08E+08 1.51E+08
2449867 4194303 7036529 11576915 18696431 29666703 46295512 71116845 1.08E+08 1.61E+08 2.37E+08 3.44E+08
3096513 5546381 9740685 16777215 28354131 47050563 76717267 1.23E+08 1.94E+08 3.02E+08 4.62E+08 6.99E+08
3593933 6690447 12236829 21977515 38754731 67108863 1.14E+08 1.91E+08 3.14E+08 5.08E+08 8.1E+08 1.27E+09
3913703 7507637 14198085 26434915 48412431 87167163 1.54E+08 2.68E+08 4.59E+08 7.73E+08 1.28E+09 2.09E+09
4084247 7997951 15505589 29703675 56138591 1.05E+08 1.92E+08 3.46E+08 6.14E+08 1.07E+09 1.85E+09 3.13E+09
4158860 8243108 16241060 31746650 61450326 1.18E+08 2.22E+08 4.14E+08 7.6E+08 1.37E+09 2.45E+09 4.29E+09
4185194 8344055 16587164 32828225 64574876 1.26E+08 2.44E+08 4.66E+08 8.8E+08 1.64E+09 3.01E+09 5.46E+09
4192509 8377704 16721760 33308925 66137151 1.31E+08 2.57E+08 5E+08 9.66E+08 1.85E+09 3.49E+09 6.5E+09
4194049 8386559 16764264 33486025 66794951 1.33E+08 2.64E+08 5.2E+08 1.02E+09 1.99E+09 3.83E+09 7.32E+09
4194280 8388330 16774890 33539155 67025181 1.34E+08 2.67E+08 5.3E+08 1.05E+09 2.07E+09 4.06E+09 7.89E+09
4194302 8388583 16776914 33551805 67090961 1.34E+08 2.68E+08 5.35E+08 1.07E+09 2.12E+09 4.19E+09 8.25E+09
4194303 8388606 16777190 33554105 67105911 1.34E+08 2.68E+08 5.36E+08 1.07E+09 2.14E+09 4.25E+09 8.44E+09
4194303 8388607 16777214 33554405 67108511 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.14E+09 4.28E+09 8.53E+09
4194303 8388607 16777215 33554430 67108836 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.57E+09
4194303 8388607 16777215 33554431 67108862 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.58E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09
4194303 8388607 16777215 33554431 67108863 1.34E+08 2.68E+08 5.37E+08 1.07E+09 2.15E+09 4.29E+09 8.59E+09

78
34 35 36 37 38 39 40 41 42 43 44
595 630 666 703 741 780 820 861 903 946 990
6579 7175 7806 8473 9177 9919 10700 11521 12383 13287 14234
52955 59535 66711 74518 82992 92170 102090 112791 124313 136697 149985
331211 384167 443703 510415 584934 667927 760098 862189 974981 1099295 1235993
1676115 2007327 2391495 2835199 3345615 3930550 4598478 5358577 6220767 7195749 8295045
7055731 8731847 10739175 13130671 15965871 19311487 23242038 27840517 33199095 39419863 46615613
25211935 32267667 40999515 51738691 64869363 80835235 1E+08 1.23E+08 1.51E+08 1.84E+08 2.24E+08
77663191 1.03E+08 1.35E+08 1.76E+08 2.28E+08 2.93E+08 3.74E+08 4.74E+08 5.97E+08 7.48E+08 9.33E+08
2.09E+08 2.86E+08 3.89E+08 5.24E+08 7.01E+08 9.28E+08 1.22E+09 1.59E+09 2.07E+09 2.67E+09 3.41E+09
4.95E+08 7.04E+08 9.9E+08 1.38E+09 1.9E+09 2.6E+09 3.53E+09 4.75E+09 6.35E+09 8.42E+09 1.11E+10
1.04E+09 1.54E+09 2.24E+09 3.23E+09 4.61E+09 6.52E+09 9.12E+09 1.27E+10 1.74E+10 2.38E+10 3.22E+10
1.97E+09 3.01E+09 4.55E+09 6.79E+09 1E+10 1.46E+10 2.12E+10 3.03E+10 4.29E+10 6.03E+10 8.41E+10
3.36E+09 5.33E+09 8.35E+09 1.29E+10 1.97E+10 2.97E+10 4.44E+10 6.55E+10 9.58E+10 1.39E+11 1.99E+11
5.22E+09 8.58E+09 1.39E+10 2.23E+10 3.52E+10 5.49E+10 8.46E+10 1.29E+11 1.94E+11 2.9E+11 4.29E+11
7.42E+09 1.26E+10 2.12E+10 3.51E+10 5.74E+10 9.26E+10 1.47E+11 2.32E+11 3.61E+11 5.55E+11 8.46E+11
9.76E+09 1.72E+10 2.98E+10 5.1E+10 8.62E+10 1.44E+11 2.36E+11 3.84E+11 6.16E+11 9.77E+11 1.53E+12
1.2E+10 2.17E+10 3.89E+10 6.87E+10 1.2E+11 2.06E+11 3.5E+11 5.86E+11 9.69E+11 1.58E+12 2.56E+12
1.38E+10 2.58E+10 4.75E+10 8.64E+10 1.55E+11 2.75E+11 4.81E+11 8.3E+11 1.42E+12 2.39E+12 3.97E+12
1.52E+10 2.9E+10 5.48E+10 1.02E+11 1.89E+11 3.44E+11 6.19E+11 1.1E+12 1.93E+12 3.35E+12 5.73E+12
1.61E+10 3.13E+10 6.04E+10 1.15E+11 2.17E+11 4.06E+11 7.5E+11 1.37E+12 2.47E+12 4.4E+12 7.74E+12
1.67E+10 3.28E+10 6.42E+10 1.25E+11 2.4E+11 4.57E+11 8.63E+11 1.61E+12 2.98E+12 5.45E+12 9.85E+12
1.7E+10 3.37E+10 6.65E+10 1.31E+11 2.55E+11 4.95E+11 9.52E+11 1.82E+12 3.43E+12 6.41E+12 1.19E+13
1.71E+10 3.41E+10 6.77E+10 1.34E+11 2.65E+11 5.2E+11 1.01E+12 1.97E+12 3.78E+12 7.21E+12 1.36E+13
1.72E+10 3.43E+10 6.83E+10 1.36E+11 2.7E+11 5.35E+11 1.06E+12 2.07E+12 4.04E+12 7.82E+12 1.5E+13
1.72E+10 3.43E+10 6.86E+10 1.37E+11 2.73E+11 5.43E+11 1.08E+12 2.13E+12 4.2E+12 8.24E+12 1.61E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.74E+11 5.47E+11 1.09E+12 2.17E+12 4.3E+12 8.51E+12 1.67E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.49E+11 1.1E+12 2.19E+12 4.36E+12 8.66E+12 1.72E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.49E+11 1.1E+12 2.19E+12 4.38E+12 8.74E+12 1.74E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.39E+12 8.77E+12 1.75E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.79E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.79E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13
1.72E+10 3.44E+10 6.87E+10 1.37E+11 2.75E+11 5.5E+11 1.1E+12 2.2E+12 4.4E+12 8.8E+12 1.76E+13

79
45 46 47 48 49 50
1035 1081 1128 1176 1225 1275
15225 16261 17343 18472 19649 20875
164220 179446 195708 213052 231525 251175
1385979 1550200 1729647 1925356 2138409 2369935
9531039 10917019 12467220 14196868 16122225 18260635
54910659 64441699 75358719 87825940 1.02E+08 1.18E+08
2.7E+08 3.25E+08 3.9E+08 4.65E+08 5.53E+08 6.55E+08
1.16E+09 1.43E+09 1.75E+09 2.14E+09 2.61E+09 3.16E+09
4.35E+09 5.5E+09 6.93E+09 8.68E+09 1.08E+10 1.34E+10
1.45E+10 1.88E+10 2.43E+10 3.13E+10 4E+10 5.08E+10
4.33E+10 5.78E+10 7.66E+10 1.01E+11 1.32E+11 1.72E+11
1.16E+11 1.6E+11 2.17E+11 2.94E+11 3.95E+11 5.27E+11
2.83E+11 3.99E+11 5.59E+11 7.76E+11 1.07E+12 1.46E+12
6.28E+11 9.11E+11 1.31E+12 1.87E+12 2.65E+12 3.72E+12
1.27E+12 1.9E+12 2.81E+12 4.12E+12 5.99E+12 8.64E+12
2.38E+12 3.65E+12 5.55E+12 8.37E+12 1.25E+13 1.85E+13
4.09E+12 6.47E+12 1.01E+13 1.57E+13 2.4E+13 3.65E+13
6.53E+12 1.06E+13 1.71E+13 2.72E+13 4.29E+13 6.69E+13
9.7E+12 1.62E+13 2.69E+13 4.4E+13 7.12E+13 1.14E+14
1.35E+13 2.32E+13 3.94E+13 6.63E+13 1.1E+14 1.81E+14
1.76E+13 3.11E+13 5.42E+13 9.37E+13 1.6E+14 2.7E+14
2.17E+13 3.93E+13 7.04E+13 1.25E+14 2.18E+14 3.78E+14
2.55E+13 4.72E+13 8.65E+13 1.57E+14 2.81E+14 5E+14
2.87E+13 5.41E+13 1.01E+14 1.88E+14 3.45E+14 6.26E+14
3.11E+13 5.97E+13 1.14E+14 2.15E+14 4.03E+14 7.48E+14
3.28E+13 6.39E+13 1.24E+14 2.38E+14 4.53E+14 8.56E+14
3.39E+13 6.67E+13 1.31E+14 2.54E+14 4.92E+14 9.44E+14
3.46E+13 6.85E+13 1.35E+14 2.66E+14 5.2E+14 1.01E+15
3.49E+13 6.95E+13 1.38E+14 2.73E+14 5.39E+14 1.06E+15
3.51E+13 7E+13 1.39E+14 2.77E+14 5.5E+14 1.09E+15
3.51E+13 7.02E+13 1.4E+14 2.8E+14 5.57E+14 1.11E+15
3.52E+13 7.03E+13 1.41E+14 2.81E+14 5.6E+14 1.12E+15
3.52E+13 7.03E+13 1.41E+14 2.81E+14 5.62E+14 1.12E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.12E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.13E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.13E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.13E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.13E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.13E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.13E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.13E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.13E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.13E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.13E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.13E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.13E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.13E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.13E+15
3.52E+13 7.04E+13 1.41E+14 2.81E+14 5.63E+14 1.13E+15

80
9.4 LABVIEW VIRTUAL INSTRUMENT