plain strain - academic.uprm.eduacademic.uprm.edu/pcaceres/courses/mechmet/met-2b.pdf · plain...
TRANSCRIPT

Plain StrainWe will derive the transformation equations that relate the strains in inclined directions to the strain in the reference directions.State of plain strain - the only deformations are those in the xy plane, i.e. it has only three strain components εx, εy and γxy.Plain stress is analogous to plane stress, but under ordinary conditions they do not occur simultaneously, except when σx = -σy and when ν = 0
Strain components εx, εy, and γxy in the xy plane (plane strain).

Comparison of plane stress and plane strain.

Transformation Equations for Plain StrainAssume that the strain εx, εy and γxy associated with the xy plane are known. We need to determine the normal and shear strains (εx1 and γx1y1) associated with the x1y1 axis. εy1 can be obtained from the equation of εx1 by substituting θ + 90 for θ.
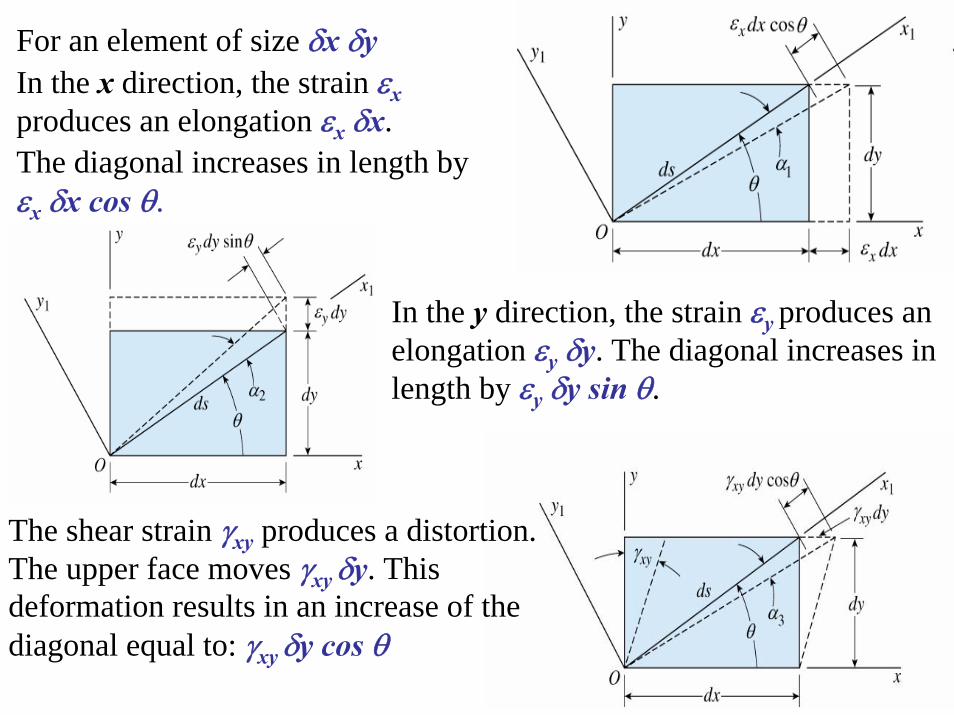
For an element of size δx δyIn the x direction, the strain εxproduces an elongation εx δx.The diagonal increases in length by εx δx cos θ.
In the y direction, the strain εy produces an elongation εy δy. The diagonal increases in length by εy δy sin θ.
The shear strain γxy produces a distortion. The upper face moves γxy δy. This deformation results in an increase of the diagonal equal to: γxy δy cos θ

The total increase Δd of the diagonal is the sum of the preceding three expressions, thus:
Δd = εx δx cos θ + εy δy sin θ + γxy δy cos θ
The normal strain εx1 in the x1 direction is equal to the increase in length divided by the initial length δs of the diagonal.
εx1 = Δd / ds = εx cos θ δx/δs + εy sin θ δy/δs + γxy cos θ δy/δs
Observing that δx/δs = cos θ and δy/δs = sin θ
θθγθεθεε
θθγθεθεε
cossin22
sincos
cossinsincos
221
221
⎟⎠⎞
⎜⎝⎛++=
++=
XYYXX
XYYXX

γ
Shear Strain γx1y1 associated with x1y1 axes.This strain is equal to the decrease in angle between lines in the material that were initially along the x1 and y1 axes. Oa and Ob were the lines initially along the x1 and y1 axis respectively. The deformation caused by the strains εx, εy and γxy caused the Oa and Ob lines to rotate and angle α and β from the x1 and y1 axis respectively. The shear strain γx1y1is the decrease in angle between the two lines that originally were at right angles, therefore, γx1y1 = α+β.

The angle α can be found from the deformations produced by the strains εx, εy and γxy . The strains εx and γxy produce a cw-rotation, while the strain εyproduces a ccw-rotation.
Let us denote the angle of rotation produced by εx , εy and γxy as α1 , α2 and α3 respectively. The angle α1 is equal to the distance εx δxsinθ divided by the length δs of the diagonal:α1 = εx sinθ dx/ds α2 = εy cosθ dy/ds α3 = γxy sinθ dy/dsObserving that dx/ds = cos θ and dy/ds = sin θ. The resulting ccw-rotation of the diagonal is
α = - α1 + α2 - α3 = - (εx – εy) sinθ cosθ - γxy sin2θ

The rotation of line Ob which initially was at at 90o to the line Oa can be found by substituting θ +90 for θ in the expression for α.
Because β is positive when clockwise. Thusβ = (εx – εy) sin(θ + 90) cos(θ + 90) + γxy sin2(θ +90) β = - (εx – εy) sinθ cosθ + γxy cos2θ
Adding α and β gives the shear strain γx1y1γx1y1 = α + β = - 2(εx – εy) sinθ cosθ + γxy (cos2θ - sin2θ)To put the equation in a more useful form:
( )θθγθθεθθεγ 2211 sincos2
cossincossin2
−++−= XYYX
YX
θθγθεθεε cossin22
sincos 221 ⎟
⎠⎞
⎜⎝⎛++= XY
YXX
θθγθεθεε cossin22
cossin 221 ⎟
⎠⎞
⎜⎝⎛−+= XY
YXY
( )⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
2sincoscossincossincossin2cossin
cossin2sincos
222
22
22
11
1
1
XY
Y
X
YX
Y
X
γεε
θθθθθθθθθθ
θθθθ
γεε
[ ]
[ ]
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
×=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
×=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−
22
22
11
1
11
11
1
1
YX
Y
X
XY
Y
X
XY
Y
X
YX
Y
X
T
T
γεε
γεε
γεε
γεε [ ]
( )⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−=
θθθθθθθθθθ
θθθθ
22
22
22
sincoscossincossincossin2cossin
cossin2sincosT
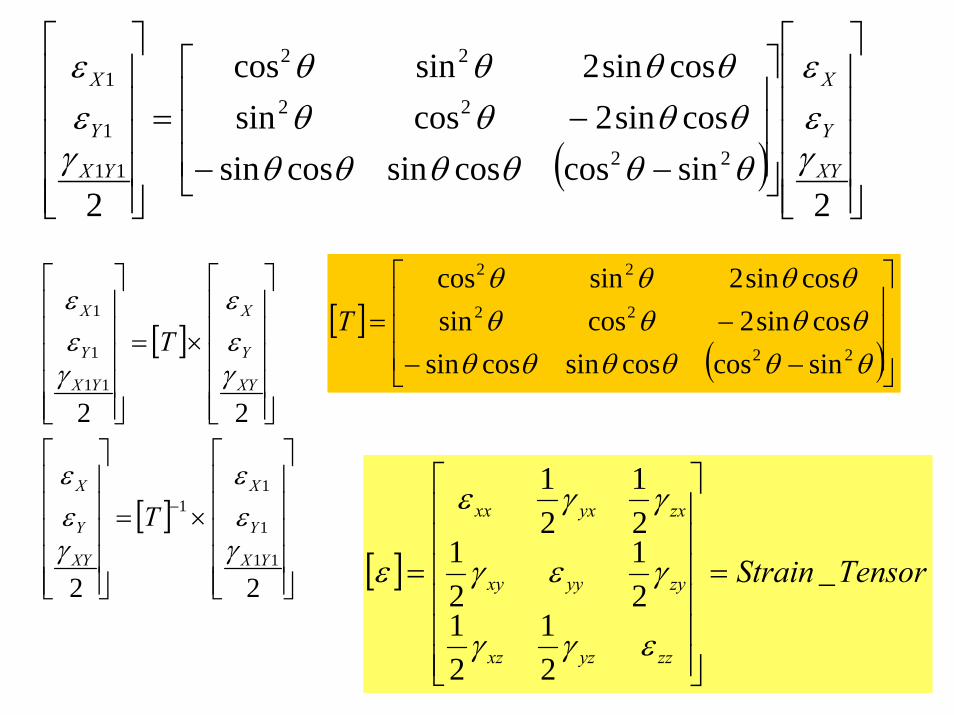
[ ] TensorStrain
zzyzxz
zyyyxy
zxyxxx
_
21
21
21
21
21
21
=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
εγγ
γεγ
γγε
ε
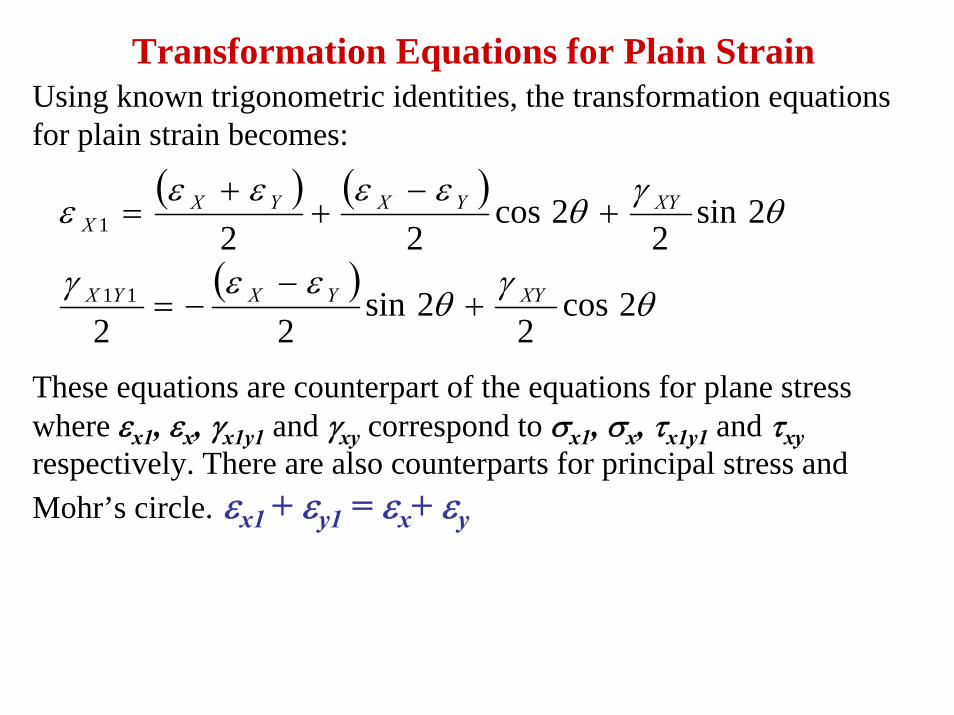
Transformation Equations for Plain StrainUsing known trigonometric identities, the transformation equations for plain strain becomes:
These equations are counterpart of the equations for plane stress where εx1, εx, γx1y1 and γxy correspond to σx1, σx, τx1y1 and τxyrespectively. There are also counterparts for principal stress and Mohr’s circle. εx1 + εy1 = εx+ εy
( ) ( )
( )θ
γθ
εεγ
θγ
θεεεε
ε
2cos2
2sin22
2sin2
2cos22
11
1
XYYXYX
XYYXYXX
+−
−=
+−
++
=

Principal Strains
The angle for the principal strains is
The value for the principal strains are
YX
XYP εε
γθ
−=2tan
( )
( ) 22
2
22
1
222
222
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛ −
−+
=
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛ −
++
=
XYYXYX
XYYXYX
γεεεεε
γεεεεε
Maximum ShearThe maximum shear strains in the xy plane are associated with axes at 45o to the directions of the principal strains:
( )
( )22
or 222
21
21
22
εεγ
εεγγεεγ
−=
−=⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛ −
+=
MAX
MAXXYYXMAX

Mohr’s Circle for Plane Strain

ExampleAn element of material in plane strain undergoes the following strains: εx=340x10-6
εy=110x10-6
γxy=180x10-6
Determine the following: (a) the strains of an element oriented at an angle θ = 30o ; (b) the principal strains and (c) the maximum shear strains.
( ) ( )
( )θ
γθ
εεγ
θγ
θεεεε
ε
2cos2
2sin22
2sin2
2cos22
11
1
XYYXYX
XYYXYXX
+−
−=
+−
++
=Solution

Thenεx1 = 225x10-6 + (115x10-6) cos 60o + (90x10-6) sin 60o = 360x10-6
½ γx1y1 = - (115x10-6) (sin 60o ) + ( 90x10-6)(cos 60o) = - 55x10-6
Therefore γx1y1 = - 110x10-6
The strain εy1 can be obtained from the equation εx1 + εy1 = εx+ εyεy1 = (340 + 110 -360)10-6 = 90x10-6
( )
( ) 22
2
22
1
222
222
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛ −
−+
=
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛ −
++
=
XYYXYX
XYYXYX
γεεεεε
γεεεεε
(b) Principal StrainsThe principal strains are readily determine from the following equations:ε1 = 370x10-6 ε2 = 80x10-6

(c) Maximum Shear StrainThe maximum shear strain is calculated from the equation:½ γmax = SQR[((εx – εy)/2)2 + ( ½ γxy)2] or γmax = (ε1 – ε2 ) Then γmax = 290x10-6
The normal strains of this element is εaver = ½ (εx + εy) = 225x10-6

For 3-D problems
[ ]
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
zzyzx
yzyyx
xzxyx
εγγ
γεγ
γγε
ε
21
21
21
21
21
21
Which is a symmetrical matrix. As in the case of stresses:
0
21
21
21
21
21
21
000
21
21
21
21
21
21
=
−
−
−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
−
εεγγ
γεεγ
γγεε
εεγγ
γεεγ
γγεε
zzyzx
yzyyx
xzxyx
zzyzx
yzyyx
xzxyx
mlk
321 εεε ⟩⟩


Dilatation (Volume strain)Under pressure: the volume will change
p
pp
p
V-ΔVzyxVV εεε ++=
Δ=Δ
222
3
222
2
1
322
13
2222222
222
0
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅−⎟
⎠⎞
⎜⎝⎛⋅−⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅−⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅⎟
⎠⎞
⎜⎝⎛⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅+⋅⋅=
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟
⎠⎞
⎜⎝⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛−⋅+⋅+⋅=
++==−⋅+⋅−
xyz
xzy
yzx
yzxzxyzyx
yzxzxyzxzyyx
zyx
I
I
IIII
γεγε
γε
γγγεεε
γγγεεεεεε
εεεεεε

Strain Deviator33
zyx εεε ++=
ΔMean strain
It produces a volume change (not a shape change)
[ ]
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
Δ−
Δ−
Δ−
=
31
21
21
21
31
21
21
21
31
zzyzx
yzyyx
xzxyx
D
εγγ
γεγ
γγε
ε
[ ]
Strain Deviator Matrix
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
Δ−
Δ−
Δ−
=
3100
0310
0031
3
2
1
ε
ε
ε
εD

Application : Strain Gauge and Strain Rosette

(Hooke’s Law)When strains are small, most of materials are
linear elastic. Tensile: σ = Ε ε
Shear: τ = G γ
Poisson’s ratio
Nominal lateral strain (transverse strain)z
zz l
l
0
Δ=ε
x
xx l
l
0
Δ−=ε
Poisson’s ratio:z
x
straintensilestrainlateral
εεν −=−=
Relationships between Stress and Strain

Relationships between Stress and Strain
For isotropic materials
Elastic Stress-Strain Relationships
00
3
2
11
===
σσ
εσ EPrincipal Stresses Principal Strains
E
E
E
13
12
11
σνε
σνε
σε
−=
−=
=Uniaxial
An isotropic material has a stress-strain relationships that are independent of the orientation of the coordinate system at a point. A material is said to be homogenous if the material properties are the same at all points in the body

[ ]
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
xy
zx
yz
z
y
x
τττσσσ
σ
[ ]
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
xy
zx
yz
z
y
x
γγγεεε
ε
[ ]
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
00000
xσ
σ
xx E εσ =
EEEx
zx
yx
xσνεσνεσε −=−==
[ ]
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
000
z
y
x
εεε
ε⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
−−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
00000
100000
010000
001000
0001
0001
0001
000
x
z
y
x
G
G
G
EEE
EEE
EEEσ
υυ
υυ
υυ
εεε
Uniaxial Stresses

( )
( )
01
1
3
212
2
221
1
=+
+=
++
=
σν
νεεσ
ννεεσ
E
E
Principal Stresses Principal Strains
EE
EE
EE
213
122
211
σνσνε
σνσε
σνσε
−−=
−=
−=Biaxial
( ) ( )
( ) ( )
( ) ( )2
2133
2312
2
2321
1
211
211
211
ννεεννεσ
ννεεννεσ
ννεεννεσ
−−++−
=
−−++−
=
−−++−
=
E
E
E
Principal Stresses Principal Strains
EEE
EEE
EEE
2133
3122
3211
σνσνσε
σνσνσε
σνσνσε
−−=
−−=
−−=
Triaxial

[ ]
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
xy
zx
yz
z
y
x
τττσσσ
σ
[ ]
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
xy
zx
yz
z
y
x
γγγεεε
ε
1
1
1
zyxz
zyxy
zyxx
EEE
EEE
EEE
σσνσνε
σνσσνε
σνσνσε
+−−=
−+−=
−−=
[ ]
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
000
z
y
x
εεε
ε
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
−−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
000
100000
010000
001000
0001
0001
0001
000
z
y
x
z
y
x
G
G
G
EEE
EEE
EEE
σσσ
υυ
υυ
υυ
εεε
[ ]
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
000
z
y
x
σσσ
σ
Triaxial Stresses

For an isotropic material, the principal axes for stress and theprincipal axes for strain coincide.
YX
XY
εεγθε −
=2tan
( )( )
G
Exy
xy
yxyx
τγ
σσνεε
=
−−=− 11
( )( ) ( ) ( ) σε θσσ
τνσσν
τ
εεγθ 2tan
212112tan =
−⋅
−=
−−=
−=
yx
xy
yx
xy
YX
XY
GE
E
G

Plane Stress ( )
( )
G
E
E
xyxy
xyy
yxx
τγ
νσσε
νσσε
=
−=
−=
1
1 ( )
0
0
=
=
+−=
zx
yz
yxz E
γ
γ
σσνε
Plane Strain
( )( ) ( )[ ]
( )( ) ( )[ ]
xyxy
xyy
yxx
G
E
E
γτ
νεεννν
σ
νεεννν
σ
=
+−−+
=
+−−+
=
1211
1211 ( )( ) ( )
0
0211
=
=
+−+
=
xz
yz
yxzE
τ
τ
εενν
νσ
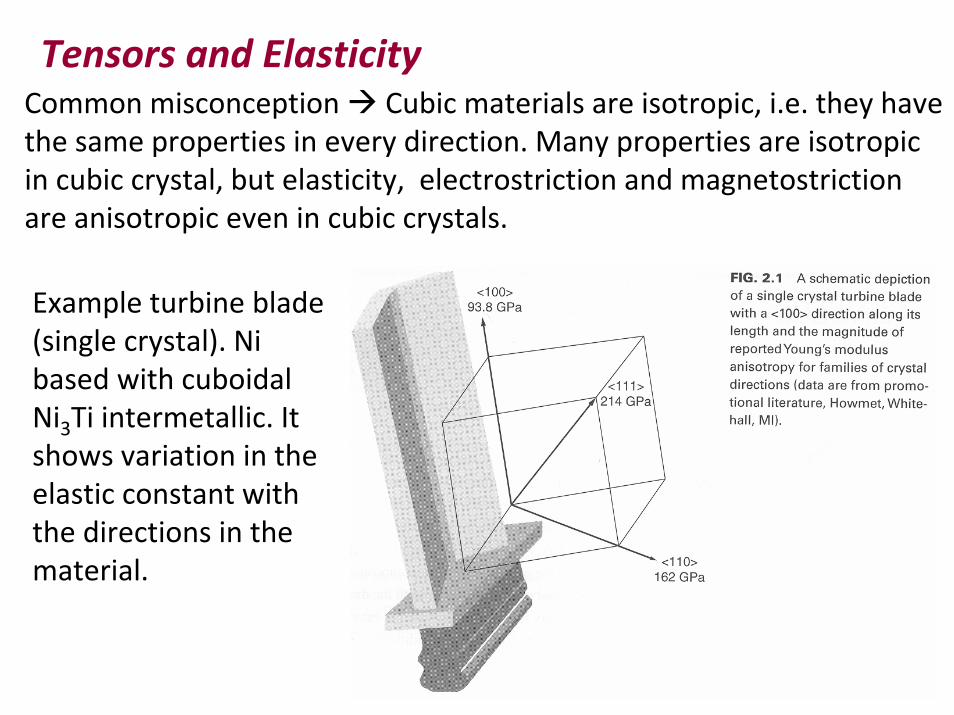
Tensors and ElasticityCommon misconception Cubic materials are isotropic, i.e. they have the same properties in every direction. Many properties are isotropic in cubic crystal, but elasticity, electrostriction and magnetostrictionare anisotropic even in cubic crystals.
Example turbine blade (single crystal). Ni based with cuboidalNi3Ti intermetallic. It shows variation in the elastic constant with the directions in the material.

Some polycrystalline materials develop preferred orientations during processing. They will show a degree of anisotropy that is dependent on the degree of preferred orientation or texture.
Tensor: A specific type of matrix representation that can relate the directionality of either a material property (property tensors –conductivity, elasticity) or a condition/state (condition tensors – stress, strain).
Tensor of zero‐rank: scalar quantity (density, temperature).Tensor of first‐rank: vector quantity (force, electric field, flux of atoms).Tensor of second‐rank: relates two vector quantities (flux of atoms with concentration gradient).

Tensor third‐rank: relates vector with a second rank tensor (electric field with strain in a piezoelectric material)
Tensor Fourth‐rank: relates two second rank tensors (relates strain and stress – Elasticity)
The key to understanding property or condition tensors is to recognize that tensors can be specified with reference to some coordinate system which is usually defined in 3‐D space by orthogonal axes that obey a right‐hand rule.
Rotation Matrix and Euler Angles:Rotation Matrix and Euler Angles: Several schemes can be used to produce a rotation matrix. The three Euler angles are given as three counterclockwise rotations:
(a)A rotation about a z‐axis, defined as φ1 (b)A rotation about the new x‐axis, defined as Φ(c)A rotation about the second z‐position, defined as φ2
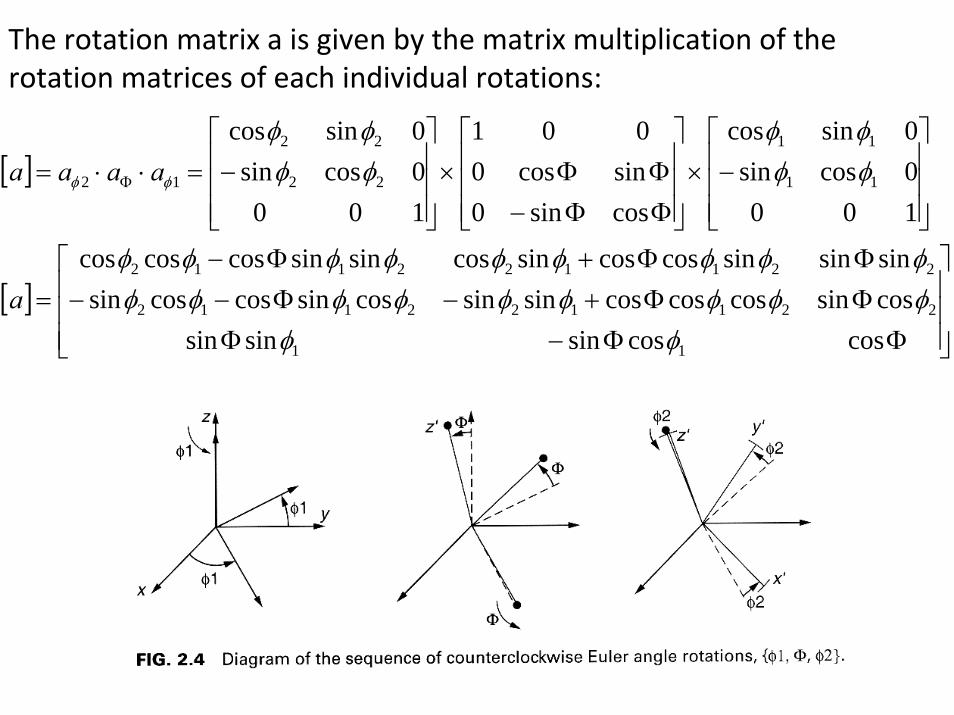
The rotation matrix a is given by the matrix multiplication of the rotation matrices of each individual rotations:
[ ]
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΦΦ−ΦΦΦ+−Φ−−ΦΦ+Φ−
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−×
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΦΦ−ΦΦ×
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=⋅⋅= Φ
coscossinsinsincossincoscoscossinsincossincoscossinsinsinsincoscossincossinsincoscoscos
1000cossin0sincos
cossin0sincos0
001
1000cossin0sincos
11
221122112
221122112
11
11
22
22
12
φφφφφφφφφφφφφφφφφφφφ
φφφφ
φφφφ
φφ
a
aaaa

Stereographic Projection
Crystallographic directions, plane normals and planes can be all represented in the stereographic projection.

Locating a pole in a stereographic projection:
o
o
o
5.74141
1 3 2 1 0 0cos
7.36141
1 3 2 0 1 0cos
6.57141
1 3 2 0 0 1cos
1 3 2
1-
1-
1-
=⎥⎦
⎤⎢⎣
⎡ ⋅
=⎥⎦
⎤⎢⎣
⎡ ⋅
=⎥⎦
⎤⎢⎣
⎡ ⋅
Find the angle of the pole with the three axes:

ExampleThe relationship between orientation and applied stress is important in describing the mechanical performance of many crystalline metals and composites.The relationship between applied stress and crystal direction isessential in interpreting the microscopic deformation mechanismsoperating in deforming crystals.
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
100030002
TConsider a property‐tensor or a condition tensor Tin the original {x y z} axes given by:
Find the tensor T’ , for the rotation shown below from the initial [100], [010], [001] axes of a cubic crystal

o
o
o
07.54
45
2
1
=
=Φ
=
φ
φ [ ]
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−+−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−+−−−+−
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΦΦ−ΦΦΦ+−Φ−−ΦΦ+Φ−
=
7.54cos45cos7.54sin45sin7.54sin7.54sin45cos7.54cos45sin7.54cos
045sin45cos][
7.54cos45cos7.54sin45sin7.54sin0cos7.54sin0cos45cos7.54cos45sin0sin0cos45sin7.54cos45cos0sin0sin7.54sin0sin45cos7.54cos45sin0cos0sin45sin7.54cos45cos0cos
][
coscossinsinsincossincoscoscossinsincossincoscossinsinsinsincoscossincossinsincoscoscos
11
221122112
221122112
a
a
aφφ
φφφφφφφφφφφφφφφφφφ
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−=
31
31
31
62
61
61
02
12
1
][a
[ ] [ ]TaTaT ××='
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−
−=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
×⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−×
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−=33.165.1408.065.1167.0289.0408.0289.05.2
31
620
31
61
21
31
61
21
100030002
31
31
31
62
61
61
02
12
1
]'[T

EEE
EEE
EEE
zyxz
zyxy
zyxx
σσνσνε
σνσσνε
σνσ
νσε
+−−=
−+−=
−−=
1
1
1
xyxy
zxzx
yzyz
G
G
G
τγ
τγ
τγ
=
=
=
Isotropic Materials
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
xy
zx
yz
z
y
x
xy
zx
yz
z
y
x
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS
τττσσσ
γγγεεε
666564636261
565554535251
464544434241
363534333231
262524232221
161514131211
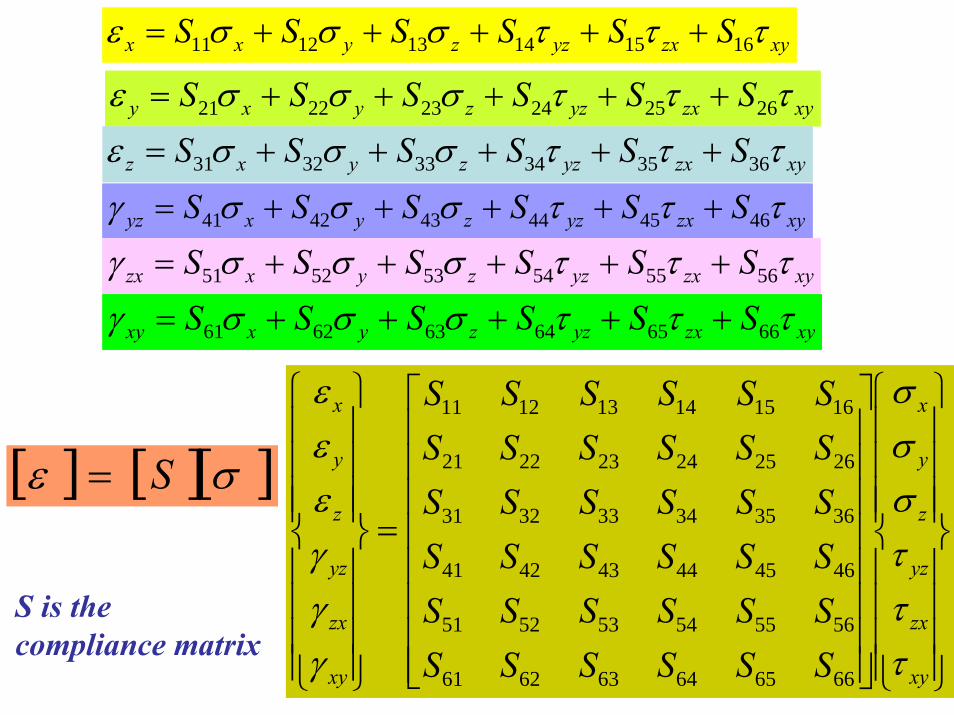
xyzxyzzyxx SSSSSS τττσσσε 161514131211 +++++=
xyzxyzzyxy SSSSSS τττσσσε 262524232221 +++++=
xyzxyzzyxz SSSSSS τττσσσε 363534333231 +++++=
xyzxyzzyxyz SSSSSS τττσσσγ 464544434241 +++++=
xyzxyzzyxzx SSSSSS τττσσσγ 565554535251 +++++=
xyzxyzzyxxy SSSSSS τττσσσγ 666564636261 +++++=
[ ] [ ][ ]σε S=
S is the compliance matrix

Isotropic MaterialsAn isotropic material has stress-strain relationships that are independent of the orientation of the coordinate system at a point.
The isotropic material requires only two independent material constants, namely the Elastic Modulus and the Poisson’s Ratio.
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
−−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
xy
zx
yz
z
y
x
xy
zx
yz
z
y
x
G
G
G
EEE
EEE
EEE
τττσσσ
νν
νν
νν
γγγεεε
100000
010000
001000
0001
0001
0001

( )( )( ) ( )( ) ( )( )
( )( )( )
( )( ) ( )( )
( )( ) ( )( )( )
( )( )
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−+−
−+−+
−+−+−
−+
−+−+−+−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
xy
zx
yz
z
y
x
xy
zx
yz
z
y
x
GG
G
EEE
EEE
EEE
γγγεεε
ννν
ννν
ννν
ννν
ννν
ννν
ννν
ννν
ννν
τττσσσ
000000000000000
000211
1211211
000211211
1211
000211211211
1
[ ] [ ][ ]εσ C=
C is the elastic or stiffness matrix
The isotropic material requires only two independent material constants, namely the Elastic Modulus and the Poisson’s Ratio.
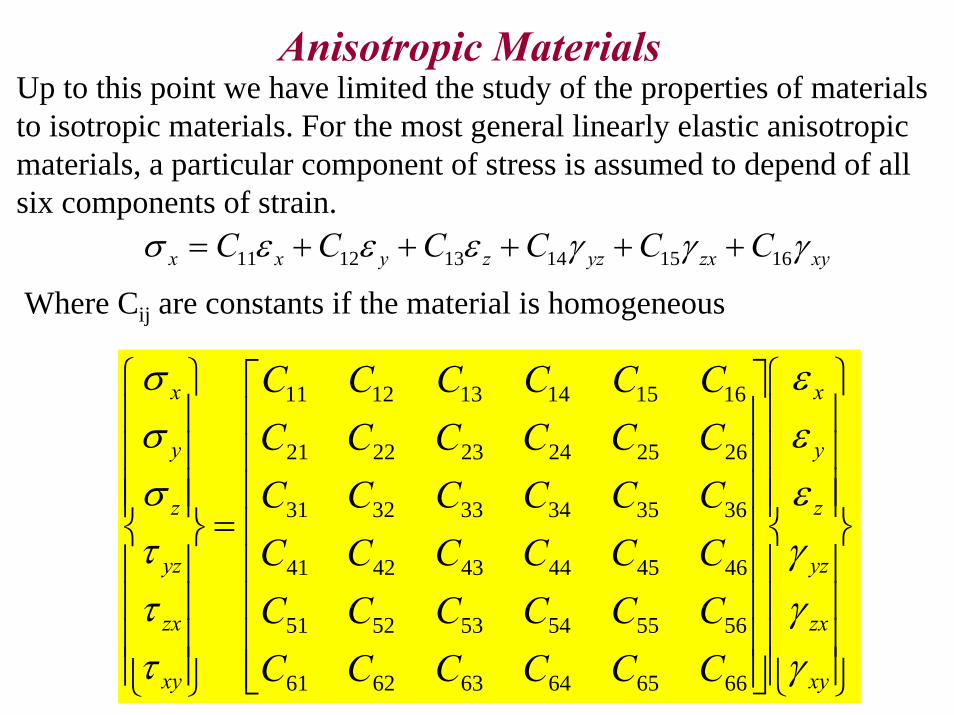
Anisotropic MaterialsUp to this point we have limited the study of the properties of materials to isotropic materials. For the most general linearly elastic anisotropic materials, a particular component of stress is assumed to depend of all six components of strain.
xyzxyzzyxx CCCCCC γγγεεεσ 161514131211 +++++=
Where Cij are constants if the material is homogeneous
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
xy
zx
yz
z
y
x
xy
zx
yz
z
y
x
CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC
γγγεεε
τττσσσ
666564636261
565554535251
464544434241
363534333231
262524232221
161514131211

⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
xy
zx
yz
z
y
x
xy
zx
yz
z
y
x
CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC
γγγεεε
τττσσσ
665646362616
565545352515
464544342414
363534332313
262524232212
161514131211
Taking energy considerations the coefficients of this matrix aresymmetric. Hence, instead of 36 independent constant, we have 21 independent constants
[ ]
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
665646362616
565545352515
464544342414
363534332313
262524232212
161514131211
CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC
C
C is referred to as the elastic matrix or stiffness matrix.

[ ] [ ][ ]
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
xy
zx
yz
z
y
x
xy
zx
yz
z
y
x
SSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSSS
S
τττσσσ
γγγεεε
σε
665646362616
565545352515
464544342414
363534332313
262524232212
161514131211
Hence, we can also write
The matrix S is referred to as the compliance matrix and the elements of S are the compliances.

21 elastic constants are required to describe the most general anisotropic material (fully anisotropic). This is in contrast to an isotropic material for which there are only two independent elastic constants (typically the Young Modulus and the Poisson’s ratio).
( )( )( ) ( )( )
( )( ) ( )[ ])εεE
)εεEE
zyxx
zyxx
++−−+
=
+−+
+−+
−=
(1211
(211211
1
νεννν
σ
νννε
νννσ

Many materials of practical interest contain certain material symmetries with respect to their elastic properties (elastic symmetries). Other type of symmetries are possible optical, electrical and thermal properties.
Let us determine the structure of the elastic matrix for a material with a single plane of elastic symmetry. Crystals whose crystalline structure is monoclinic as examples of materials possessing a single plane of elastic symmetry. Example Iron aluminide, gypsum, talc, ice, selenium
Materials with one plane of symmetry are referred to as Monoclinic materials.

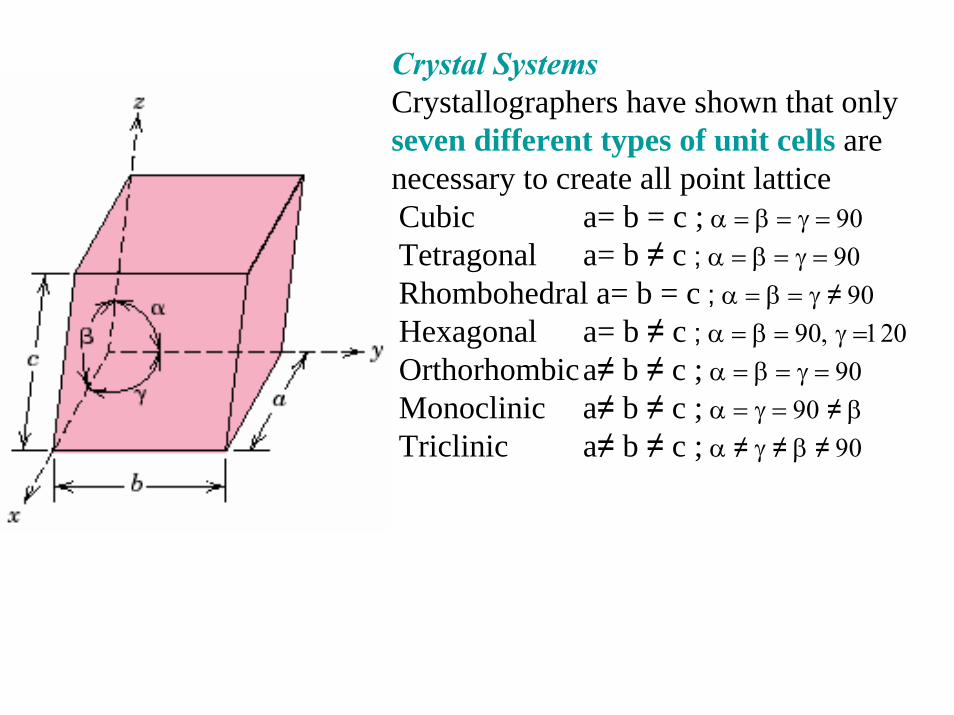
Crystal SystemsCrystallographers have shown that only seven different types of unit cells are necessary to create all point latticeCubic a= b = c ; α = β = γ = 90Tetragonal a= b ≠ c ; α = β = γ = 90Rhombohedral a= b = c ; α = β = γ ≠ 90Hexagonal a= b ≠ c ; α = β = 90, γ =120Orthorhombica≠ b ≠ c ; α = β = γ = 90Monoclinic a≠ b ≠ c ; α = γ = 90 ≠ β Triclinic a≠ b ≠ c ; α ≠ γ ≠ β ≠ 90

Monoclinic MaterialsLet us assume that the z-plane is the plane of elastic symmetry.For such a material the elastic coefficients in the stress-strain law must remain unchanged when subjected to a transformation that represents a reflection in the symmetry plane. For monoclinic materials (due to one plane of elastic symmetry) the number of independent elastic constants is reduced from 21 to 13.
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
xy
zx
yz
z
y
x
xy
zx
yz
z
y
x
CCCCCCCC
CCCCCCCCCCCC
γγγεεε
τττσσσ
66362616
5545
4544
36332313
26232212
16131211
0000000000
000000

KEY TO NOTATION
TRICLINIC (21)
MONOCLINIC (13)

ORTHORHOMBIC (9) CUBIC (3)
(7) TETRAGONAL (6)

HEXAGONAL (5) ISOTROPIC (2)
(7) TRIGONAL (6)

Orthotropic MaterialsLet us consider a material with a second plane of elastic symmetry. The y-plane and the z-plane are the planes of elastic symmetry and are perpendicular to each other. Again, for such a material the elastic coefficients in the stress-strain law must remain unchanged when subjected to a transformation that represents a reflection in the symmetry plane. For orthotropic materials (due to the two planes of elastic symmetry) the number of independent elastic constants isreduced from 21 to 9.
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
xy
zx
yz
z
y
x
xy
zx
yz
z
y
x
CC
CCCCCCCCCC
γγγεεε
τττσσσ
66
55
44
332313
232212
131211
000000000000000000000000
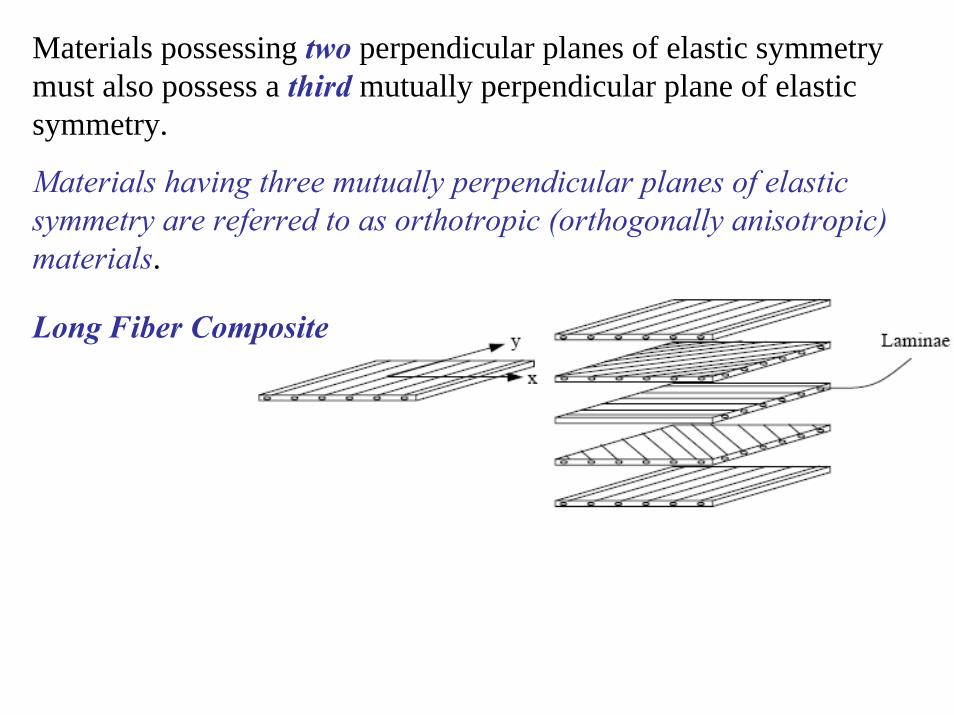
Materials possessing two perpendicular planes of elastic symmetry must also possess a third mutually perpendicular plane of elastic symmetry.
Materials having three mutually perpendicular planes of elastic symmetry are referred to as orthotropic (orthogonally anisotropic) materials.
Long Fiber Composite

Transversely Isotropic MaterialsMaterials that are isotropic in a plane.Transversely isotropic materials require five independent material constants.
( )⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
xy
zx
yz
z
y
x
xy
zx
yz
z
y
x
CCC
CCCCCCCCCC
γγγεεε
τττσσσ
200000
0000000000000000000
1211
44
44
331313
131112
131211

Isotropic MaterialsThe isotropic material requires only two independent material constants, namely the Elastic Modulus and the Poisson’s Ratio.
( )
( )
( ) ⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
−=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
xy
zx
yz
z
y
x
xy
zx
yz
z
y
x
CC
CC
CCCCCCCCCCC
γγγεεε
τττσσσ
200000
02
0000
002
000
000000000
1211
1211
1211
111212
121112
121211
( )( )( ) ( )( )
( )( ) GECCECEC =
+=
−−+
=−+
−=
νννν
ννν
122
211
2111 1211
1211

Engineering Material Constants for Orthotropic Materials
The quantities appearing in the coefficient matrix can be written in terms of well understood engineering constants such as the Young Modulus and the Poisson’s ratio. For the x, y and z coordinate axes we can write:
zzz
yyy
xxx
E
EE
εσ
εσεσ
=
==
Where the Young Modulus in the x-, y- and z-directions are not necessarily equal.
Any extension in the x-axis is accompanied by a contraction in the y- and z- axis. However, this quantities are not necessarily equal in orthotropic materials.
Where νxy is the contraction in the y-direction due to the stress in the x-direction
xxzz
xxyy
ενε
ενε
−=
−=

If all three stresses are applied simultaneously, then:
zz
yy
yzx
x
xzy
zz
zyy
yx
x
xyy
zz
zxy
y
yxx
xx
EEE
EEE
EEE
σσν
σνε
σν
σσν
ε
σνσν
σε
1
1
1
+−−=
−+−=
−−=
[ ] [ ][ ]
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
xy
zx
yz
z
y
x
xy
zx
yz
z
y
x
SS
SSSSSSSSSS
S
τττσσσ
γγγεεε
σε
66
55
44
332313
232212
131211
000000000000000000000000
Comparing with the compliance matrix for orthotropic materials:
1 1 1
231312
332211
y
yz
z
zy
x
xz
z
zx
x
xy
y
yx
zyx
EES
EES
EES
ES
ES
ES
νννννν−=−=−=−=−=−=
===
Where νxy is the contraction in the y-direction due to the stress in the x-direction

Whereas with isotropic materials the relationship between shear stress and shear strain is the same in any coordinate planes, for orthotropic materials these relationships are not the same.
1 1 1
1 1 1
665544xyzxyz
zxzx
zxyzyz
yzxyxy
xy
GS
GS
GS
GGG
===
=== τγτγτγ
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
−−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
xy
zx
yz
z
y
x
xy
zx
yz
zy
yz
x
xz
z
zy
yx
xy
z
zx
y
yx
x
xy
zx
yz
z
y
x
G
G
G
EEE
EEE
EEE
τττσσσ
νν
νν
νν
γγγεεε
100000
010000
001000
0001
0001
0001

⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
Δ−
Δ+
Δ+
Δ+
Δ−
Δ+
Δ+
Δ+
Δ−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
xy
zx
yz
z
y
x
xy
zx
yz
yx
yxxy
yx
yxxzyz
yx
yzxyxz
zx
xyzxzy
zx
xzzx
zx
zyxzxy
zy
zyyxzx
zy
yzzxyx
zy
zyyz
xy
zx
yz
z
y
x
GG
GEEEEEE
EEEEEE
EEEEEE
γγγεεε
νννννννν
νννννννν
νννννννν
τττσσσ
000000000000000
0001
0001
0001
zyx
zxyzxyxzzxzyyzyxxy
EEEννννννννν 21 −−−−
=Δ

⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
xy
y
x
xy
yx
xy
y
yx
x
xy
y
x
G
EE
EE
τσσ
ν
ν
γεε
100
01
01
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
xy
y
x
xy
y
x
CCCCC
γεε
τσσ
33
2212
1211
0000
In 2-D
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
xy
y
x
xy
yxxy
y
yxxy
yxy
yxxy
xyx
yxxy
x
xy
y
x
G
EE
EE
γεε
ννννν
ννν
νν
τσσ
00
011
011

Neumann’s PrincipleThis is the most important concept in crystal physics. It states; ……………... the symmetry of any physical property of a crystal must include the symmetry elements of the point group of the crystal. This means that measurements made in symmetry‐related directions will give the same property coefficients.
Example: NaCl belongs to the m3m group . The [100] and [010] directions are equivalent.
Since these directions are physically the same, it should be expected that measurements of permittivity, elasticity or any other physical property will be the same in these two directions.

Crystal System External Minimum Symmetry Unit Cell Properties
Triclinic None a, b, c, al, be, ga,Monoclinic One 2‐fold axis, || to b (b unique) a, b, c, 90, be, 90Orthorhombic Three perpendicular 2‐folds a, b, c, 90, 90, 90Tetragonal One 4‐fold axis, parallel c a, a, c, 90, 90, 90Trigonal One 3‐fold axis a, a, c, 90, 90, 120Hexagonal One 6‐fold axis a, a, c, 90, 90, 120Cubic Four 3‐folds along space diagonal a, a, ,a, 90, 90, 90
7 Crystal Systems
triclinictrigonal
hexagonal
cubic tetragonalmonoclinic
orthorhombic

Anisotropy Factor
Cubic SymmetryFor cubic crystals, there are four three‐fold symmetry axes (along the <111> body diagonals) such that:
665544
312312
332211
SSSSSSSSS
======
There is a reduction of the nine constants for orthotropic symmetry to three. An anisotropic factor A, can be defined for cubic crystals
44
1211 )(2S
SSA −=Using the direction cosines l, m, n for a particular
direction, one can determine the elastic properties of a cubic single crystal in a particular direction by the relationship:
22222244121111
'11 2
121 nlnmmlSSSSSEhkl
++⎥⎦⎤
⎢⎣⎡ −−−==

IsotropyWhen the anisotropy factor is equal to one, there are just two independent components, e.g. C11 and C12. In this instance, the rigidity or shear modulus G is given by: ( )
44121144
121
SCCCG =−==
And λ is given by: 12C=λ
These two constants are known as the Lame constants and are usedto describe all the elastic constants of isotropic materials
Poisson’s ratio can de expressed in terms of Lame constants: ⎟
⎠⎞
⎜⎝⎛ +
=+
−=−=
λ
υGCC
CSS
12
1
1211
12
11
12
The compressibility (β) or bulk modulus (K)relate hydrostatic or mean stress to volume strain
321 GK mean +=
Δ== λσ
β
⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ +
=
λ
λG
GGE
1
23

Example
Solution:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
xy
y
x
xy
yxxy
y
yxxy
yxy
yxxy
xyx
yxxy
x
xy
y
x
G
EE
EE
γεε
ννννν
ννν
νν
τσσ
00
011
011
12x
xy
y
yx
EES
νν−=−=
An orthotropic material has the following properties Ex=7,500ksi, Ey= 2,500ksi, Gxy = 1,250ksi and νxy= 0.25. Determine the principal stresses and strains at a point on a free surface where the following strains were measured: εx=-400μ ; εy=600μ ; γxy=-500μ . Consider plane stress conditions

⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
−
−
6
6
6
105001060010400
12500002.25533.63803.6387660
xxx
xy
y
x
τσσ
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
xy
y
x
xy
yx
xy
y
yx
x
xy
y
x
G
EE
EE
τσσ
ν
ν
γεε
100
01
01
083.07500
250025.0 =×
=== yx
xyyx
x
xy
y
yx EEEEν
ννν
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
psipsipsi
xy
y
x
6256.1276
2681
τσσ
psipsi
psi
Max 1.20754.2777
9.1372
2
1
=−=
=
τσσ
μγμε
με
1118459
659
2
1
=−=
=
Max

( ) 316.06.12762681
)625(222tan
5.0600400
5002tan
=−−−⋅
=−
=
=−−
−=
−=
yx
xy
YX
XY
σστ
θ
εεγθ
σ
ε
Different angles to obtain the principal stresses and the principal strains.

Example
Suppose we start with a state of strain (in μ strain) strain−⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡μ
100302030200502050300
Consider an orthotropic material where :
GPa
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
6.2700000010000000450000007540250004050550002555103

We need to change the strain tensor for a strain vector
610
1004060
100200300
100302030200502050300
−×
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=−⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡strainμ
[ ] GPa
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
6.2700000010000000450000007540250004050550002555103
σ 610
1004060
100200300
−×
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
×

[ ] MPaMPa⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=0.2370.24.0
70.25.3076.24.076.24.44
760.2400.0700.2000.23500.30400.44
σ
Eigen‐values Eigen‐vector (cosines from x‐y‐z angles to the principal axes)
MPa⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
9656.440008154.30000119.22
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−
0418.03110.09495.01948.09296.03130.09800.01980.00217.0
Example
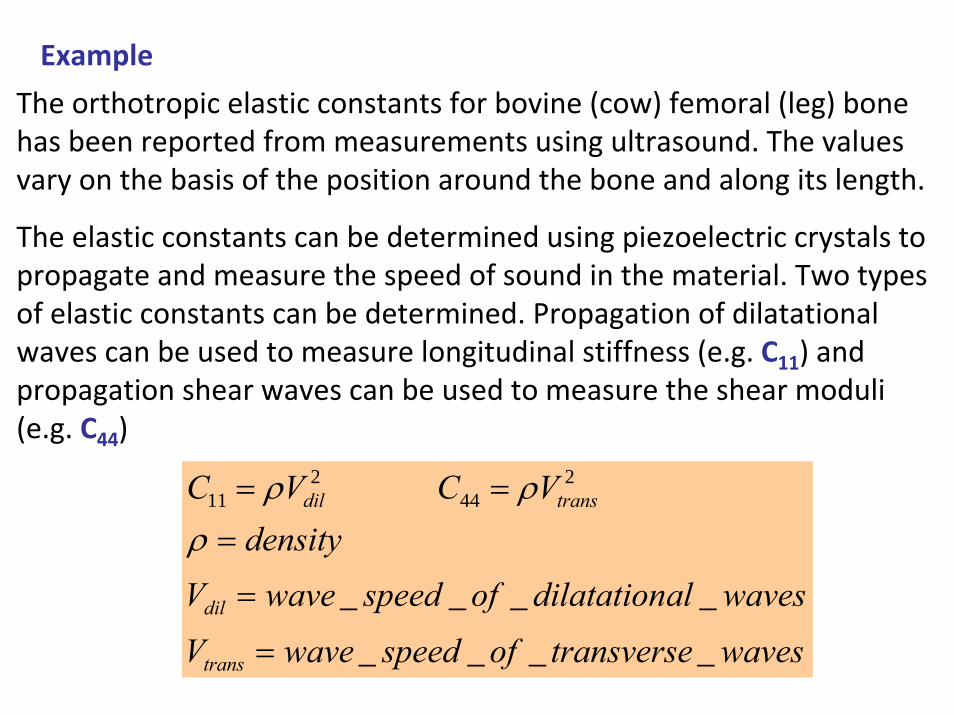
The orthotropic elastic constants for bovine (cow) femoral (leg) bone has been reported from measurements using ultrasound. The valuesvary on the basis of the position around the bone and along its length.
The elastic constants can be determined using piezoelectric crystals to propagate and measure the speed of sound in the material. Two types of elastic constants can be determined. Propagation of dilatational waves can be used to measure longitudinal stiffness (e.g. C11) and propagation shear waves can be used to measure the shear moduli(e.g. C44)
wavestransverseofspeedwaveV
wavesaldilatationofspeedwaveVdensity
VCVC
trans
dil
transdil
____
____
244
211
=
=
===
ρρρ

The approximately reported stiffness values are:
MPa
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
3.50000003.600000070000002578.400074.183.60008.43.614
Find the Young Modulus along the bone length (z‐direction)? And along the radial direction (x and y directions).
Find the Poisson’s ratios?
Convert the stiffness matrix into a compliance matrix.
1
19.000000016.000000014.0000000046.0014.0009.0000014.007.0026.0000009.0026.0086.0
−
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−−−
MPa

1044.00090 28.1407.011
3016.00260 6.11086.011
373.00260 7.21046.011
131
13
222
121
12
111
212
21
333
=⇒−====
=⇒−====
=⇒−====
υ
υ
υ
.Eυ-GPa
SE
.Eυ-GPa
SE
.Eυ-GPa
SE

ExampleDetermine the modulus of elasticity for iron single crystals in the <111>, <110> and <100> directions.
31
31
31111
02
12
1110
001100nmlDirections
nwvu
uvwCos
mwvu
uvwCos
lwvu
uvwCos
=++
=
=++
=
=++
=
222
222
222
1))(001(
1))(010(
1))(100(
γ
β
α
60.88.20.810 441211
13
−
−−
FeSSSGPa
( )
GPaEE
125
0.8)0(26.88.20.820.81
100
100
=
=⎟⎠⎞
⎜⎝⎛ −−−−=
( )
GPaEE
270
7.3)91
91
91(
26.88.20.820.81
111
111
=
=++⎟⎠⎞
⎜⎝⎛ −−−−=
( )
GPaEE
210
75.4)0041(
26.88.20.820.81
110
110
=
=++⎟⎠⎞
⎜⎝⎛ −−−−=