predictive 3d search algorithm for multi-frame motion estimation lim hong yin, ashraf a. kassim,...
Post on 19-Dec-2015
217 views
TRANSCRIPT
PREDICTIVE 3D SEARCH ALGORITHM FOR MULTI-FRAME MOTION ESTIMATION
Lim Hong Yin, Ashraf A. Kassim, Peter H.N de With
IEEE Transaction on Consumer Electronics,2008

Outline
Overview of FME Algorithm Multi-Directional Hexagon Proposed 3D Search Scheme High-motion & Low-motion Simulation Results & Conclusion

Overview of FME Algorithm
In FME, the block-matching cost function increases monotonically as the search moves away from the position of the best match/global minimum
There is also a risk of the search getting trapped in a local minima the same rate-distortion performance as the full search (FS) cannot be achieved

Multi-Directional Hexagon
Next best position in relation to that of the current best position
Multi-Directional Hexagon pattern
All points within a range of ± 2 from T1 are then evaluated and the direction of the best point from T1 (Next Best Position) is recorded.

Multi-Directional Hexagon
Fixed Hexagon pattern
Step1. Initial best point obtain using LDP(Large Diamond Pattern)
Step2. use fixed hexagon patternStep3. In the final refinement serach,
the Small hexagon/diamond is used
1
11
1
1
1
1
1
1
2 2
2
2 2
33
3
4
4
4
4

Multi-Directional Hexagon
Multi-Directional Hexagon pattern
1
1
1
11
1
1
1
1
3 3
3
4
44
4
2
2 2
Step1. Initial best point obtain using LDP(Large Diamond Pattern)Step2. use multi-directional hexagon pattern
Step3. In the final refinement serach,
the Small hexagon/diamond is used
Results in lower number of search points !!

3D Search Pattern Scheme
In a 3D search, the search can proceed directly to points at nearby frames and there is no necessity to perform a new search from the window center for each reference frame
the computational time can be reduced!
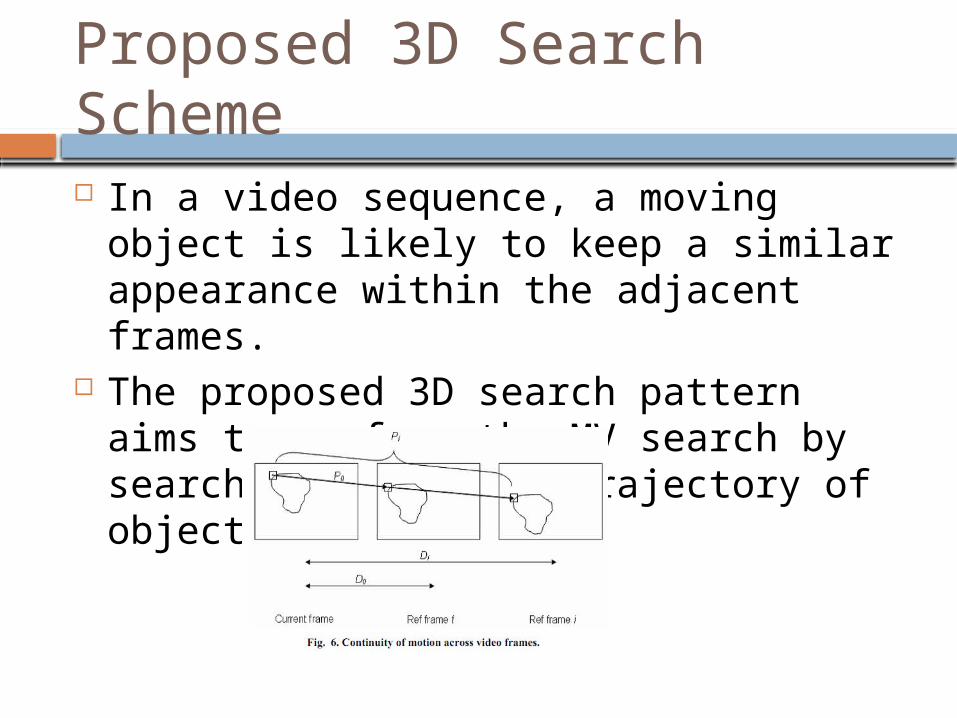
Proposed 3D Search Scheme In a video sequence, a moving object is
likely to keep a similar appearance within the adjacent frames.
The proposed 3D search pattern aims to perform the MV search by searching along the trajectory of object.

Proposed 3D Search Scheme 3D Multi-Directional Hexagon Search
patterns(3D MD-HEXS)Flatted HexagonSmall Hexagon
Search Center

Proposed 3D Search Scheme 3D Diamond Search patterns

Proposed 3D Search Scheme Step.1 3D-LDP is used for the initial search Step.2 The position with the minimum cost
function, Jmin in the 3D-LDP is then used to select one of the four directional hexagon search patterns
(repeated until Jmin lies in the 3D search center) Step.3 3D-SDP is used to find best MV

Multi-Hexagon-Grid Search For High-Motion
Most center-biased search algorithms such as DS and HEXBS perform poorly when used on high-motion sequences and when the search range is large
To overcome this problem, we propose the use of a large search pattern, specifically the Multi-Hexagon-Grid Search pattern for high-motion activity blocks.
Multi-Hexagon-Grid Search For High-Motion
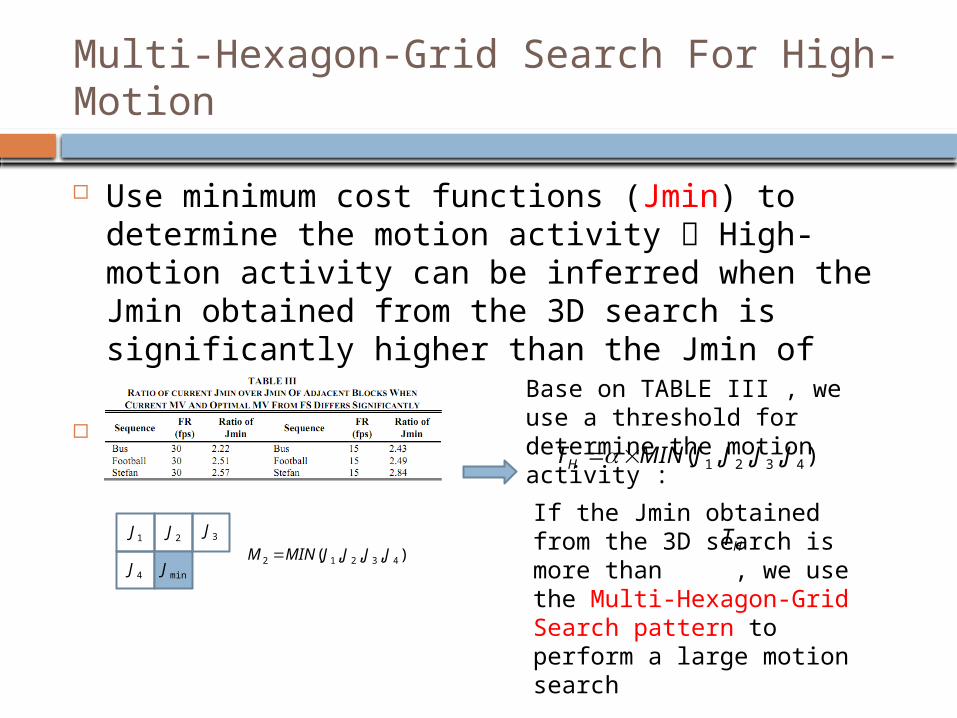
Use minimum cost functions (Jmin) to determine the motion activity High-motion activity can be inferred when the Jmin obtained from the 3D search is significantly higher than the Jmin of adjacent blocks
1J 2J 3J
4J minJ),,,( 43212 JJJJMINM
Base on TABLE III , we use a threshold for determine the motion activity : ),,,( 4321 JJJJMINTH
If the Jmin obtained from the 3D search is more than , we use the Multi-Hexagon-Grid Search pattern to perform a large motion search
HT

Simplifying Search for Low-Motion Blocks
The table shows the percentage of optimal MV obtained using FS, which is ±1 from the origin(%MV)
When the block is determined to be low-motion through the proposed criterion, the 3D search strategy is simplified to using only the 3D Small Diamond Search
If the spatially adjacent MVs is within ±1 from the origin, then the current block is determined to be of low-motion activity.
Low motion High motion
Simulation Results
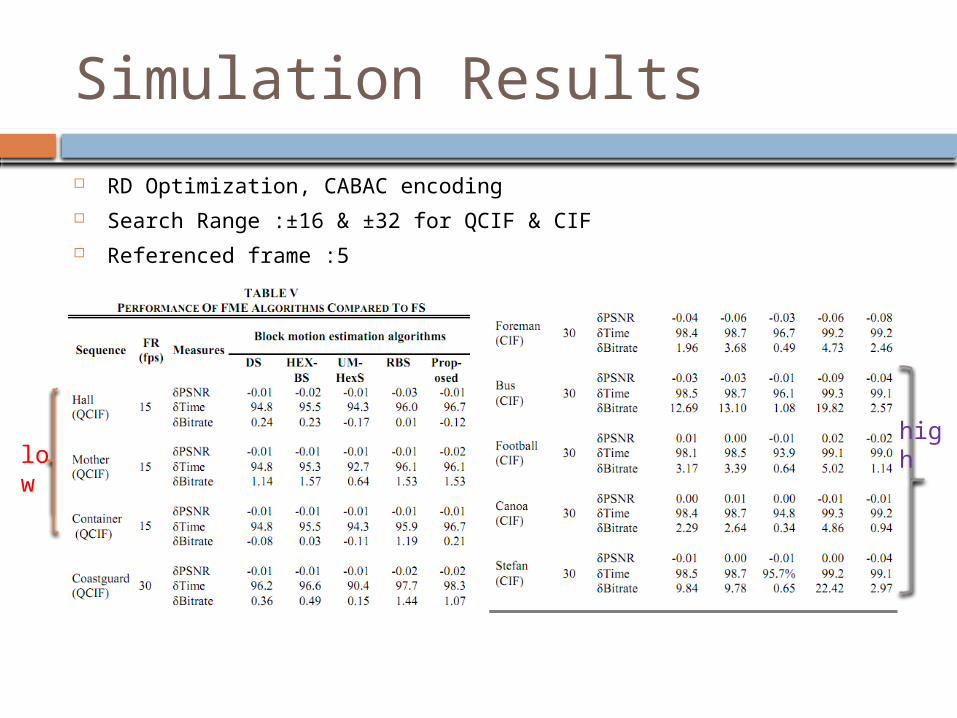
RD Optimization, CABAC encoding Search Range :±16 & ±32 for QCIF & CIF Referenced frame :5
lowhigh

Simulation Results

Conclusion
The 3D MV predictors are used to obtain a more accurate search center while the 3D search patterns are designed to track the motion trajectories along the reference frames. This reduces the computational complexity while maintaining the search accuracy.
Implement a large motion search method utilizing the Multi-Hexagon Grid search pattern and saves on the search points for low-motion blocks by simplifying the 3D search
On average, the PSNR loss for our algorithm is less than 0.2 dB while a savings of more than 96% in computational time is achieved compared to FS.