preprocessing of lifelog september 18, 2008 sung-bae cho 0
TRANSCRIPT

Preprocessing of Lifelog
September 18, 2008
Sung-Bae Cho
1

• Motivation
• Preprocessing techniques
– Data cleaning
– Data integration and transformation
– Data reduction
– Discretization
• Preprocessing examples
– Accelerometer data
– GPS data
Agenda

Data Types & Forms
• Attribute-value data:
• Data types
– Numeric, categorical (see the hierarchy for its relationship)
– Static, dynamic (temporal)
• Other kinds of data
– Distributed data
– Text, web, meta data
– Images, audio/video
A1 A2 … An C
3

Why Data Preprocessing?
• Data in the real world is dirty
– Incomplete: missing attribute values, lack of certain attributes of interest, or containing only aggregate data
• e.g., occupation=“ ”
– Noisy: containing errors or outliers
• e.g., Salary=“-10”
– Inconsistent: containing discrepancies in codes or names
• e.g., Age=“42” Birthday=“03/07/1997”
• e.g., Was rating “1,2,3”, now rating “A, B, C”
• e.g., discrepancy between duplicate records
4
Why Is Data Preprocessing Important?
• No quality data, no quality results!
– Quality decisions must be based on quality data
• e.g., duplicate or missing data may cause incorrect or even misleading statistics
• Data preparation, cleaning, and transformation comprises the majority of the work in a lifelog application (90%)
5

Multi-Dimensional Measure of Data Quality
• A well-accepted multi-dimensional view:
– Accuracy
– Completeness
– Consistency
– Timeliness
– Believability
– Value added
– Interpretability
– Accessibility
6

Major Tasks in Data Preprocessing
• Data cleaning
– Fill in missing values, smooth noisy data, identify or remove outliers and noisy data, and resolve inconsistencies
• Data integration
– Integration of multiple sources of information, or sensors
• Data transformation
– Normalization and aggregation
• Data reduction
– Obtains reduced representation in volume but produces the same or similar analytical results
• Data discretization (for numerical data)
– Part of data reduction but with particular importance, especially for numerical data
7

• Motivation
• Preprocessing techniques
– Data cleaning
– Data integration and transformation
– Data reduction
– Discretization
• Preprocessing examples
– Accelerometer data
– GPS data
Agenda

Data Cleaning
• Importance
– “Data cleaning is the number one problem in data processing & management”
• Data cleaning tasks
– Fill in missing values
– Identify outliers and smooth out noisy data
– Correct inconsistent data
– Resolve redundancy caused by data integration
9

Missing Data
• Data is not always available
– e.g., many tuples have no recorded values for several attributes, such as GPS log inside a building
• Missing data may be due to
– Equipment malfunction
– Inconsistent with other recorded data and thus deleted
– Data not entered due to misunderstanding
– Certain data may not be considered important at the time of entry
– Not register history or changes of the data
10

How to Handle Missing Data?
• Ignore the tuple
• Fill in missing values manually: tedious + infeasible?
• Fill in it automatically with
– a global constant : e.g., “unknown”, a new class?!
– the attribute mean
– the most probable value: inference-based such as Bayesian formula, decision tree, or EM algorithm
11

Noisy Data
• Noise: random error or variance in a measured variable
• Incorrect attribute values may due to
– Faulty data collection instruments
– Data entry problems
– Data transmission problems
– Technology limitation
– Inconsistency in naming convention
• Other data problems which require data cleaning
– Duplicate records
– Incomplete data
– Inconsistent data
12

How to Handle Noisy Data?
• Binning method:
– First sort data and partition into (equi-depth) bins
– Then one can smooth by bin means, smooth by bin median, smooth by bin boundaries, etc
• Clustering
– Detect and remove outliers
• Combined computer and human inspection
– Detect suspicious values and check by human
• e.g., deal with possible outliers
• Regression
– Smooth by fitting the data into regression functions
13

Binning
• Attribute values (for one attribute, e.g., age):
– 0, 4, 12, 16, 16, 18, 24, 26, 28
• Equi-width binning – for bin width of e.g., 10:
– Bin 1: 0, 4 [ -, 10 ) bin
– Bin 2: 12, 16, 16, 18 [10, 20) bin
– Bin 3: 24, 26, 28 [20, + ) bin
– Denote negative infinity, + positive infinity
• Equi-frequency binning – for bin density of e.g., 3:
– Bin 1: 0, 4, 12 [ -, 14) bin
– Bin 2: 16, 16, 18 [14, 21) bin
– Bin 3: 24, 26, 28 [21, + ] bin
14

Clustering
• Partition data set into clusters, and one can store cluster representation only
• Can be very effective if data is clustered but not if data is “scattered”
• There are many choices of clustering definitions and clustering algorithms.
15

• Motivation
• Preprocessing techniques
– Data cleaning
– Data integration and transformation
– Data reduction
– Discretization
• Preprocessing examples
– Accelerometer data
– GPS data
Agenda

Data Integration
• Data integration:
– Combines data from multiple sources
• Schema integration
– Integrate metadata from different sources
– Entity identification problem: identify real world entities from multiple data sources
• e.g., A.cust-id B.cust-#
• Detecting and resolving data value conflicts
– For the same real world entity, attribute values from different sources are different
• e.g., different scales, metric vs. British units
– Possible reasons: different representations, different scales
• e.g., metric vs. British units
• Removing duplicates and redundant data17

Data Transformation
• Smoothing
– Remove noise from data
• Normalization
– Scaled to fall within a small, specified range
• Attribute/feature construction
– New attributes constructed from the given ones
• Aggregation
– Summarization
• Generalization
– Concept hierarchy climbing
18

Data Transformation: Normalization
• Min-max normalization
• Z-score normalization
• Normalization by decimal scaling
AAA
AA
A
minnewminnewmaxnewminmax
minvv _)__('
A
A
devstand
meanvv
_'
j
vv
10' where j is the smallest integer such that Max(| |)<1'v
19

• Motivation
• Preprocessing techniques
– Data cleaning
– Data integration and transformation
– Data reduction
– Discretization
• Preprocessing examples
– Accelerometer data
– GPS data
Agenda
Data Reduction Strategies
• Data is too big to work with
• Data reduction
– Obtain a reduced representation of the data set that is much smaller in volume but yet produce the same (or almost the same) analytical results
• Data reduction strategies
– Dimensionality reduction — remove unimportant attributes
– Aggregation and clustering
– Sampling
– Numerosity reduction
– Discretization and concept hierarchy generation
21

Dimensionality Reduction
• Feature selection (i.e., attribute subset selection)
– Select a minimum set of attributes (features) that is sufficient for the lifelog management task
• Heuristic methods (due to exponential # of choices)
– Step-wise forward selection
– Step-wise backward elimination
– Combining forward selection and backward elimination
– Decision-tree induction
22

Example of Decision Tree Induction
Initial attribute set:{A1, A2, A3, A4, A5, A6}
A4 ?
A1? A6?
Class 1 Class 2 Class 1 Class 2
Reduced attribute set: {A1, A4, A6}
23

Histograms
• A popular data reduction technique
• Divide data into buckets and store average (sum) for each bucket
• Can be constructed optimally in one dimension using dynamic programming
• Related to quantization problems
0
5
10
15
20
25
30
35
40
10000 30000 50000 70000 90000
24

Data Compression
• String compression
– There are extensive theories and well-tuned algorithms
– Typically lossless
– But only limited manipulation is possible without expansion
• Audio/video compression
– Typically lossy compression, with progressive refinement
– Sometimes small fragments of signal can be reconstructed without reconstructing the whole
• Time sequence is not audio
– Typically short and vary slowly with time
26

Data Compression
Original Data Compressed Data
lossless
Original DataApproximated
lossy
27

Numerosity Reduction
• Parametric methods
– Assume the data fits some model, estimate model parameters, store only the parameters, and discard the data (except possible outliers)
– Log-linear models:
• obtain value at a point in m-D space as the product on appropriate marginal subspaces
• Non-parametric methods
– Do not assume models
– Major families: histograms, clustering, sampling
28
Regression & Log-Linear Models
• Linear regression: Data are modeled to fit a straight line
– Often uses the least-square method to fit the line
• Multiple regression:
– Allows a response variable Y to be modeled as a linear function of multidimensional feature vector
• Log-linear model:
– Approximates discrete multidimensional probability distributions
29

Regress Analysis & Log-Linear Models
• Linear regression: Y = + X
– Two parameters , and specify the line and are to be estimated by using the data at hand
– using the least squares criterion to the known values of Y1, Y2, …, X1, X2, ….
• Multiple regression: Y = b0 + b1 X1 + b2 X2
– Many nonlinear functions can be transformed into the above
• Log-linear models:
– The multi-way table of joint probabilities is approximated by a product of lower-order tables
– Probability: p(a, b, c, d) = ab acad bcd
30

Sampling
• Choose a representative subset of the data
– Simple random sampling may have poor performance in the presence of skew
• Develop adaptive sampling methods
– Stratified sampling:
• Approximate the percentage of each class (or subpopulation of interest) in the overall database
• Used in conjunction with skewed data
Raw Data Cluster/Stratified Sample
31

• Motivation
• Preprocessing techniques
– Data cleaning
– Data integration and transformation
– Data reduction
– Discretization
• Preprocessing examples
– Accelerometer data
– GPS data
Agenda

Discretization
• Three types of attributes
– Nominal — values from an unordered set
– Ordinal — values from an ordered set
– Continuous — real numbers
• Discretization
– Divide the range of a continuous attribute into intervals because some data analysis algorithms only accept categorical attributes
• Some techniques
– Binning methods – equal-width, equal-frequency
– Entropy-based methods
33
Hierarchical Reduction
• Use multi-resolution structure with different degrees of reduction
• Hierarchical clustering is often performed but tends to define partitions of data sets rather than “clusters”
• Parametric methods are usually not amenable to hierarchical representation
• Hierarchical aggregation
– An index tree hierarchically divides a data set into partitions by value range of some attributes
– Each partition can be considered as a bucket
– Thus an index tree with aggregates stored at each node is a hierarchical histogram
34

Discretization & Concept Hierarchy
• Discretization
– Reduce the number of values for a given continuous attribute by dividing the range of the attribute into intervals. Interval labels can then be used to replace actual data values
• Concept hierarchies
– Reduce the data by collecting and replacing low level concepts (such as numeric values for the attribute age) by higher level concepts (such as young, middle-aged, or senior)
35

Discretization & Concept Hierarchy Generation
• Binning
• Histogram analysis
• Clustering analysis
• Entropy-based discretization
• Segmentation by natural partitioning
36

Entropy-based Discretization
• Given a set of samples S, if S is partitioned into two intervals S1 and S2 using boundary T, the entropy after partitioning is
• The boundary that minimizes the entropy function over all possible boundaries is selected as a binary discretization
• The process is recursively applied to partitions obtained until some stopping criterion is met, e.g.,
• Experiments show that it may reduce data size and improve classification accuracy
E S TS
EntS
EntS S S S( , )| |
| |( )
| |
| |( ) 1
12
2
Ent S E T S( ) ( , )
37
• Motivation
• Preprocessing techniques
– Data cleaning
– Data integration and transformation
– Data reduction
– Discretization
• Preprocessing examples
– Accelerometer data
– GPS data
Agenda

Accelerometer Sensor Data
• Geometrical Calculation
– Acceleration
– Energy
– Frequency domain entropy
– Correlation
– Vibration
• Parameter tuning of accelerometer
– Adjusting parameters for surroundings
39

Acceleration Calculation
• 3D acceleration(ax, ay, az) and gravity (G)
• Acceleration (a)
– Vector combination: (ax, ay, az)
– Considering gravity (G)
• a = ax + ay + az – g
• γ = a + g = ax + ay + az
40
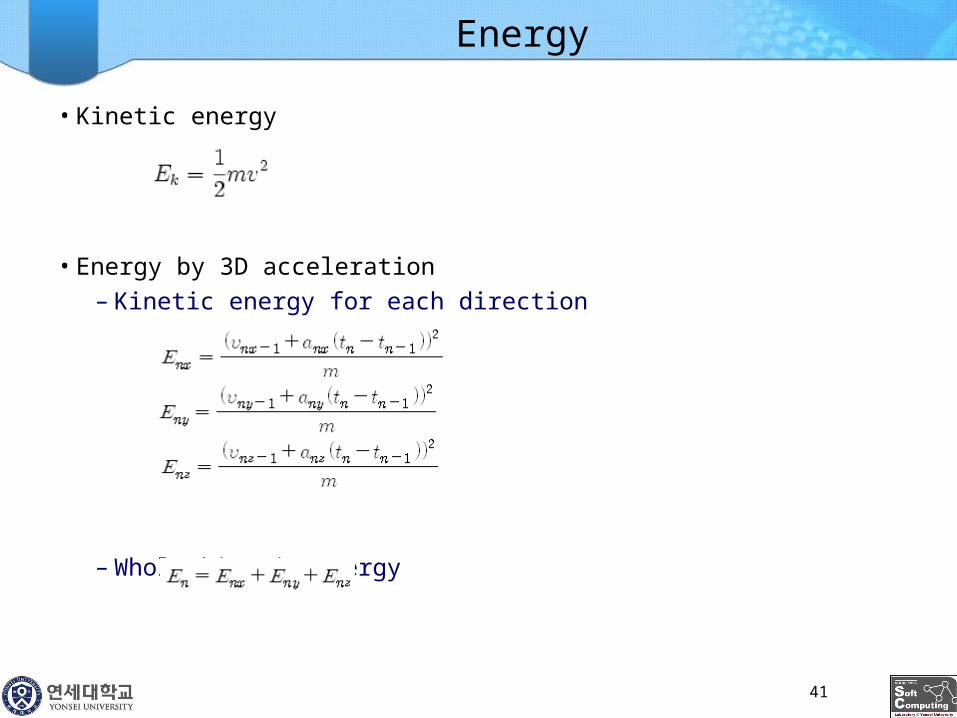
Energy
• Kinetic energy
• Energy by 3D acceleration
– Kinetic energy for each direction
– Whole kinetic energy
41

Why Energy?
• For classification of sedentary activity
• For consideration bias by the body weight
Moderate intensity activities
(walking, typing)
Vigorous activities (running)
vs.
Same activity &heavy man 1
Same activity &light man 2vs
.
F1>F2, E1 = E2 ∵ force ∝ weight
42

Frequency-domain Entropy
• Converted value from time scale x(t) to frequency scale X(f)
• Normalize by entropy calculation
• Fourier transform
– Continuous Fourier Transform
– Discrete Fourier Transform
• Fast Fourier Transform algorithms
I(X) is the information content or
self-information of X, which is itself a random variable
43

Vibration
• The variation of distance of acceleration (ax, ay, az) from origin
– Static condition: ax2 + ay
2 + az2 = g2
– In action: ax2 + ay
2 + az2 ≠ g2
– Vibration calculation (Δ)
44

Sensor Parameter Tuning
• Acceleration variables (ax, ay, az) can be tuned by a linear function
• Setting the values kx, bx by test sample data (vx1, vx2)
– Measuring on a static condition
– Gravity g is generally 9.8
45

LPSDB
LabelingInterface
LocationDB
PlaceSelection
LabelInference
GPS Data Preprocessing
• Mapping from GPS coordinates to place
• Place:
– A human readable labeling of positions [Hightower ' 03]
• Place Mapping Process
Scalability?
46

Outlier Elimination
• To get rid of the peculiar GPS data from its normal boundary
– ti is the time of the ith GPS data
– da,b means the distance between the ath and bth coordinates
– pi is the ith GPS coordinates
– kv denotes the threshold for outlier clearing.)(THEN)
--(IF
1
1,
1
,1iv
ii
iiv
ii
ii pDisregardktt
dORk
tt
d
47

Missing Data Correction
• Regression for filling missing data
– ti is the time of the ith GPS data
– pi is the ith GPS coordinates
Gray dots
)-(-
-11
11
11
ii
ii
iiii pp
tt
ttpp
48

Mapping Example of Yonsei Univ.
• Divided the domain area into a lattice and then labeled each region
49
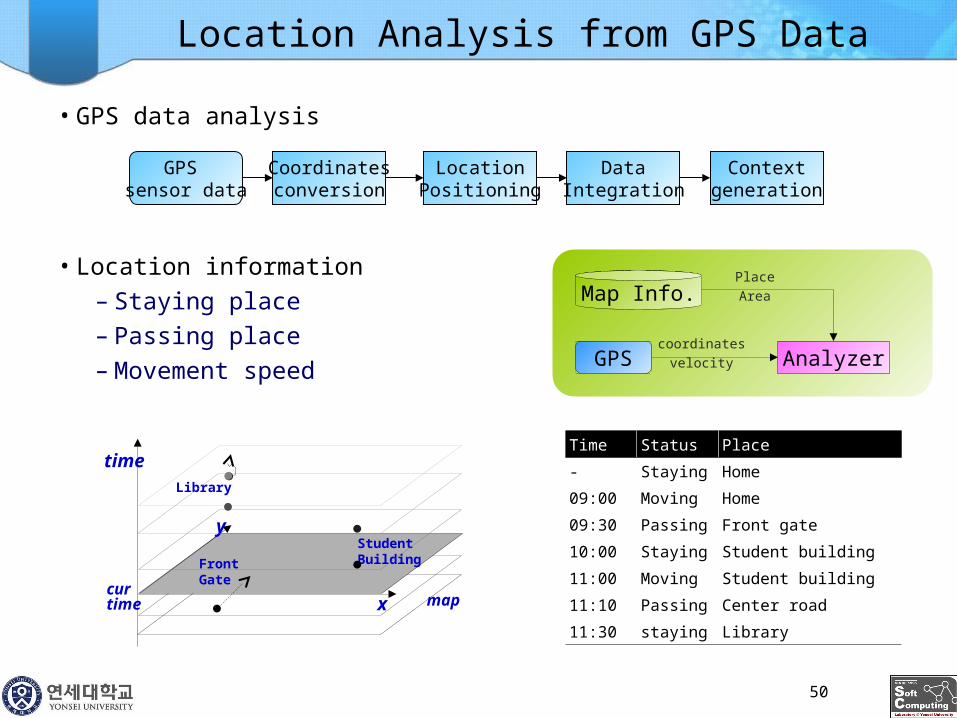
Location Analysis from GPS Data
• GPS data analysis
• Location information
– Staying place
– Passing place
– Movement speed
Time Status Place
- Staying Home
09:00 Moving Home
09:30 Passing Front gate
10:00 Staying Student building
11:00 Moving Student building
11:10 Passing Center road
11:30 staying Library
GPS sensor data
Coordinatesconversion
LocationPositioning
DataIntegration
Contextgeneration
AnalyzerGPScoordinates
velocity
Map Info.Place
Area
x
y
time
FrontGate
StudentBuilding
Library
curtime map
50

Location Positioning
• Place detection methods
– Polygon area based: Accurate, difficult to make DB
– Center point based: easy to manage, inaccurate
Polygon basedPolygon based
Center basedCenter based
51

Summary
• Data preprocessing is a big issue for data management
• Data preprocessing includes
– Data cleaning and data integration
– Data reduction and feature selection
– Discretization
• Many methods have been proposed but still an active area of research
52