presentazione standard di powerpoint - prisma.unina.it · dr.huan liu & prof. fanny ficuciello...
TRANSCRIPT

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Robotic prostheses: Classification, design, sensing and actuation
Huan Liu
PRISMA Lab & ICAROS Center,
Università degli Studi di Napoli Federico II

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Content Introduction Classification Design Sensing Actuation A research case

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Content Introduction Classification Design Sensing Actuation A research case
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
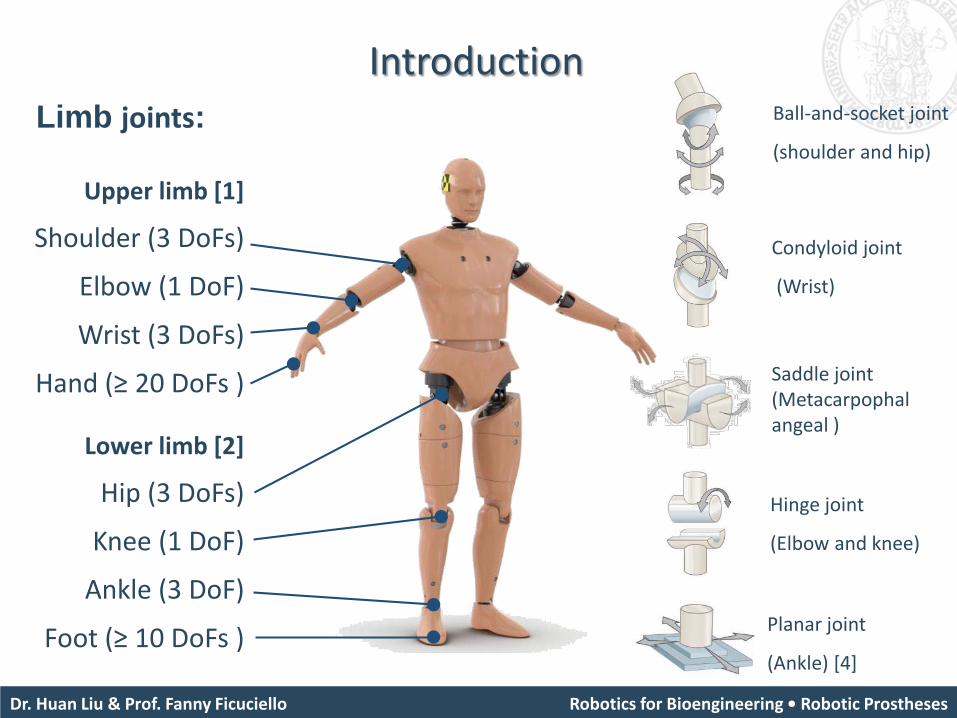
Upper limb [1]
Shoulder (3 DoFs)
Elbow (1 DoF)
Wrist (3 DoFs)
Hand (≥ 20 DoFs )
Lower limb [2]
Hip (3 DoFs)
Knee (1 DoF)
Ankle (3 DoF)
Foot (≥ 10 DoFs )
Limb joints:
Saddle joint (Metacarpophalangeal )
Condyloid joint
(Wrist)
Ball-and-socket joint
(shoulder and hip)
Hinge joint
(Elbow and knee)
Planar joint
(Ankle) [4]
Introduction

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Shoulder disarticulationTranshumeral
Elbow disarticulationTransradial
Wrist disarticulationPartial hand
Finger
Upper limb
Lower limbHip disarticulationTransfemoral knee disarticulationTranstibialAnkle disarticulationPartial footToe
Levels of limb amputationIntroduction
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
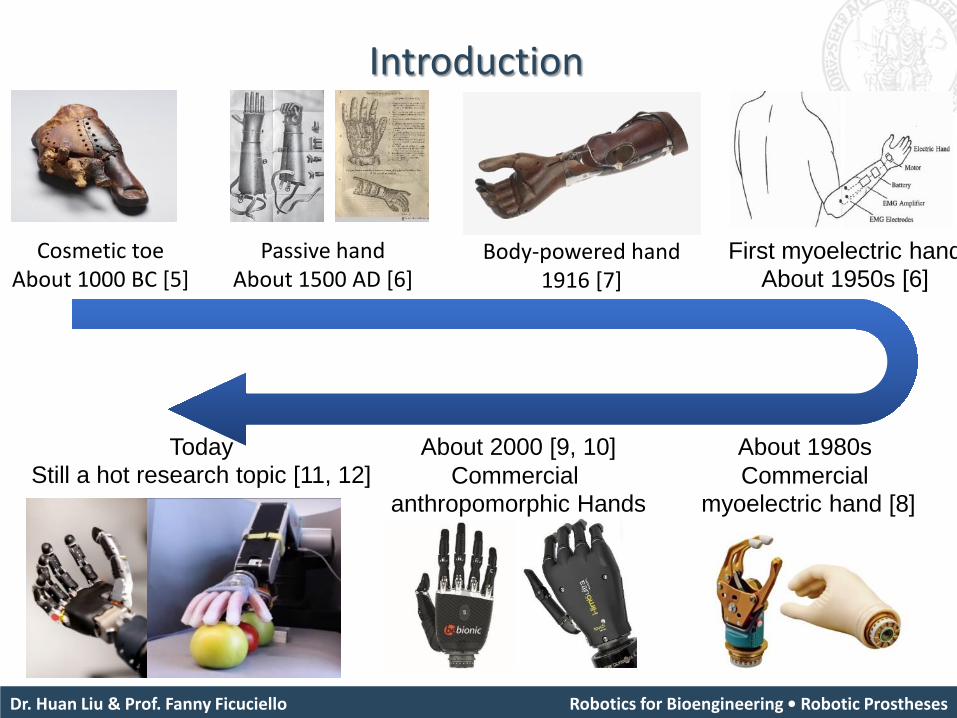
Cosmetic toeAbout 1000 BC [5]
Passive handAbout 1500 AD [6]
Body-powered hand1916 [7]
First myoelectric handAbout 1950s [6]
About 1980s Commercial
myoelectric hand [8]
About 2000 [9, 10]Commercial
anthropomorphic Hands
Today Still a hot research topic [11, 12]
Introduction

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Content Introduction Classification Design Sensing Actuation A research case
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Classification
According to amputation level Upper limb
Full arm, transhumeral, tranradial, partial hand, finger
Lower limb Full leg, transfemoral, transtibial, partial foot, toe
According to power supply Externally-powered
Electric, pneumatic/hydraulic
Body-powered Shoulder-powered, elbow-powered, wrist-powered and finger-powered, etc.
Passive/cosmetic prosthesis Not the interests of this lecture
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
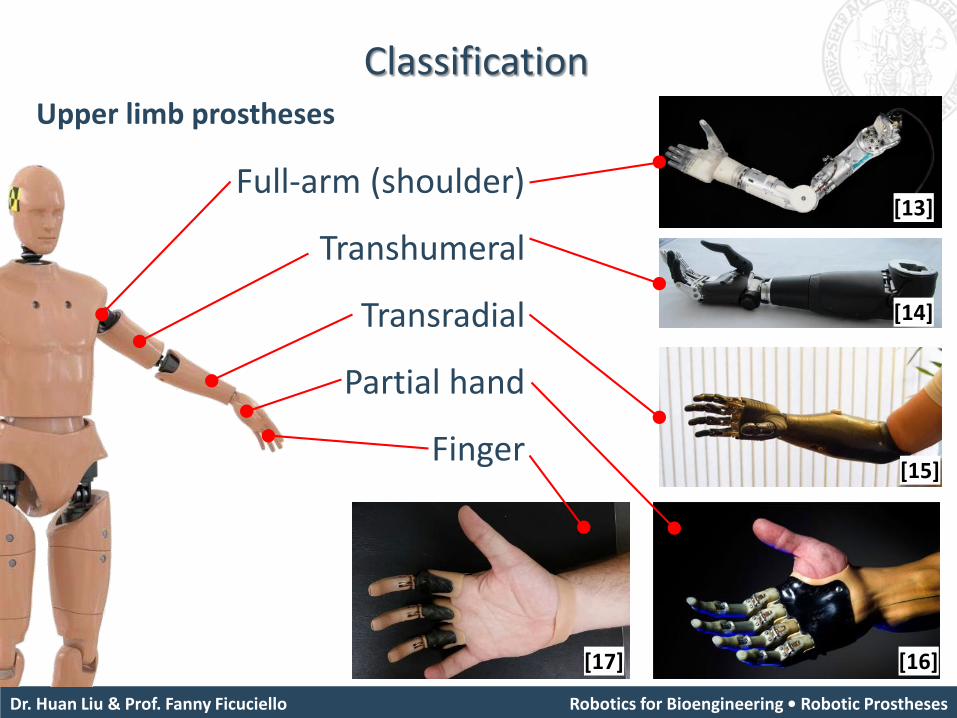
Full-arm (shoulder)
Transhumeral
Transradial
Partial hand
Finger
Upper limb prostheses
[13]
[14]
[15]
[16][17]
Classification
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
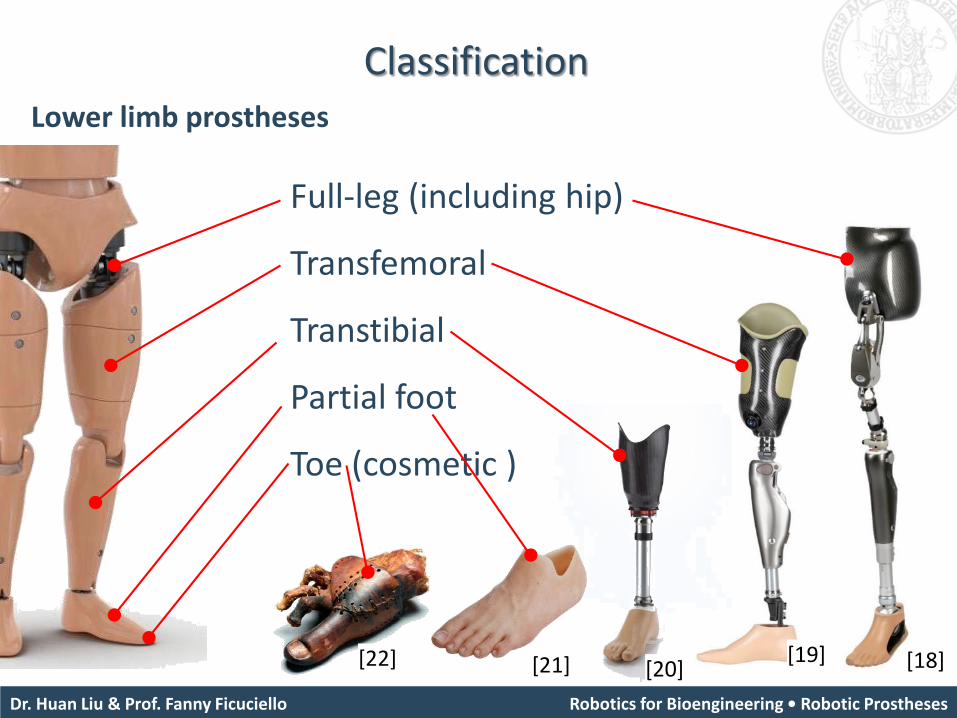
Full-leg (including hip)
Transfemoral
Transtibial
Partial foot
Toe (cosmetic )
Lower limb prostheses
[18][19][20][21][22]
Classification
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
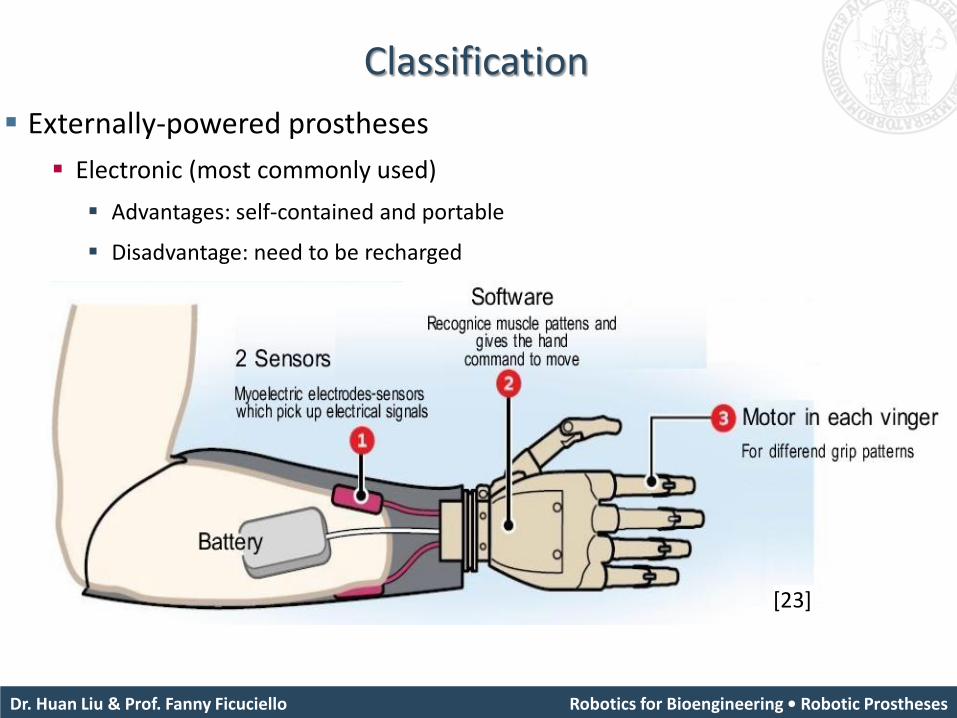
[23]
Classification Externally-powered prostheses
Electronic (most commonly used) Advantages: self-contained and portable
Disadvantage: need to be recharged
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
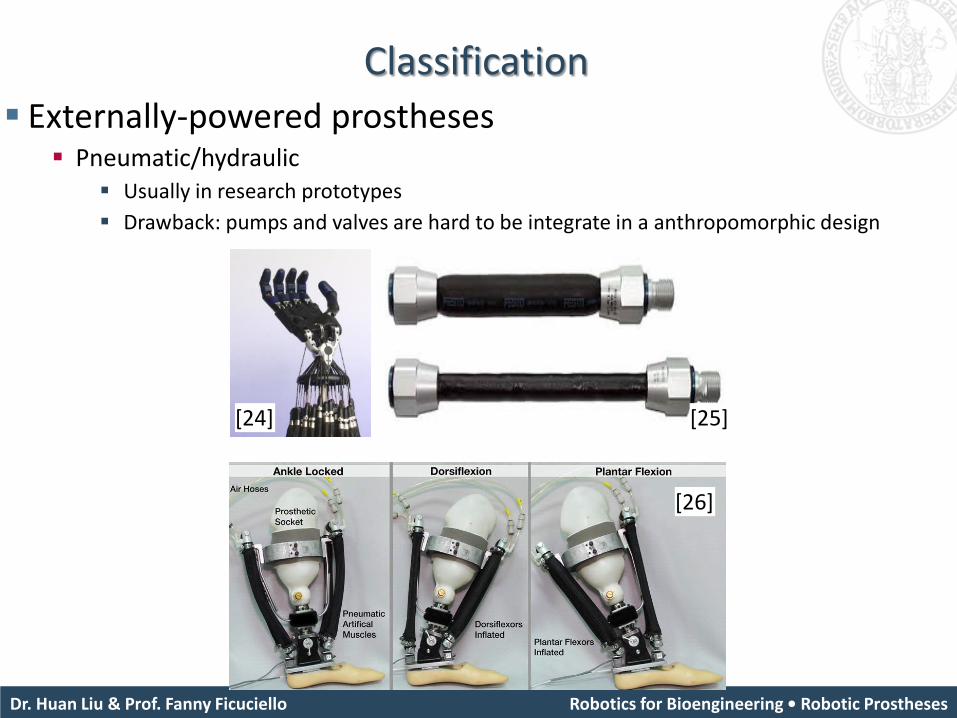
[24]
[26]
[25]
Classification Externally-powered prostheses
Pneumatic/hydraulic Usually in research prototypes Drawback: pumps and valves are hard to be integrate in a anthropomorphic design

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
[27]
[28]
Video: https://www.youtube.com/watch?v=niKwFgZRdqk
Video: https://www.youtube.com/watch?v=SeF1IetqMSs&feature=youtu.be
Classification Body-powered prostheses
Upper limb examples

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
[30] Oscar Pistorius [32] With the Flex-Foot Cheetah by Ossur [33]
[30]
[29]
Video:https://www.youtube.com/watch?v=a9E0uHvfEcI
Classification Body-powered prostheses
Lower limb examples

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Externally-powered VS Body-powered
Externally-powered Body-powered
Weight heavier(Motor, battery, electronics, etc.)
Lighter(less components)
Cost Higher Lower(less components)
Reliability More components, lower reliability
Better(Simpler design)
Battery-life limited Infinite
Dexterity &functionality
Better(Multiple actuators can be used) Usually one DoF of actuation
Naturalbody movement Better No
(Extra body movement for actuation)
Classification

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Content Introduction Classification Design Sensing Actuation A research case

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Design Lightweight
Most important factor (especially for hand prosthesis)
Anthropomorphism Appearance
Kinematics
Comfortable human-machine interface Mechanical (Socket, osseointegrated implant, etc.)
Control (Sensors and control method)
Others Reliability, cost, high force and torque output

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
[34]
[35] [36]
[37] [38]
Design Lightweight
Simpler design (Underactuation, less motors and smaller batteries) Light weight structure and materials Weight allocation with lower moment of inertia
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
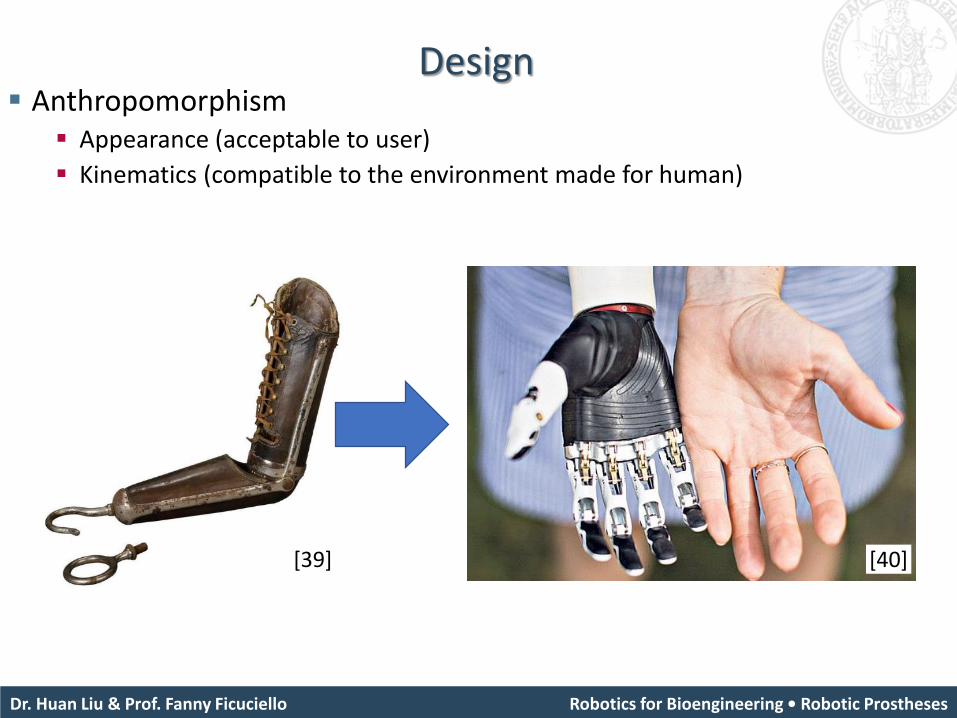
[39] [40]
Design Anthropomorphism
Appearance (acceptable to user) Kinematics (compatible to the environment made for human)
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
[41] [42]
[43] [44] [45]
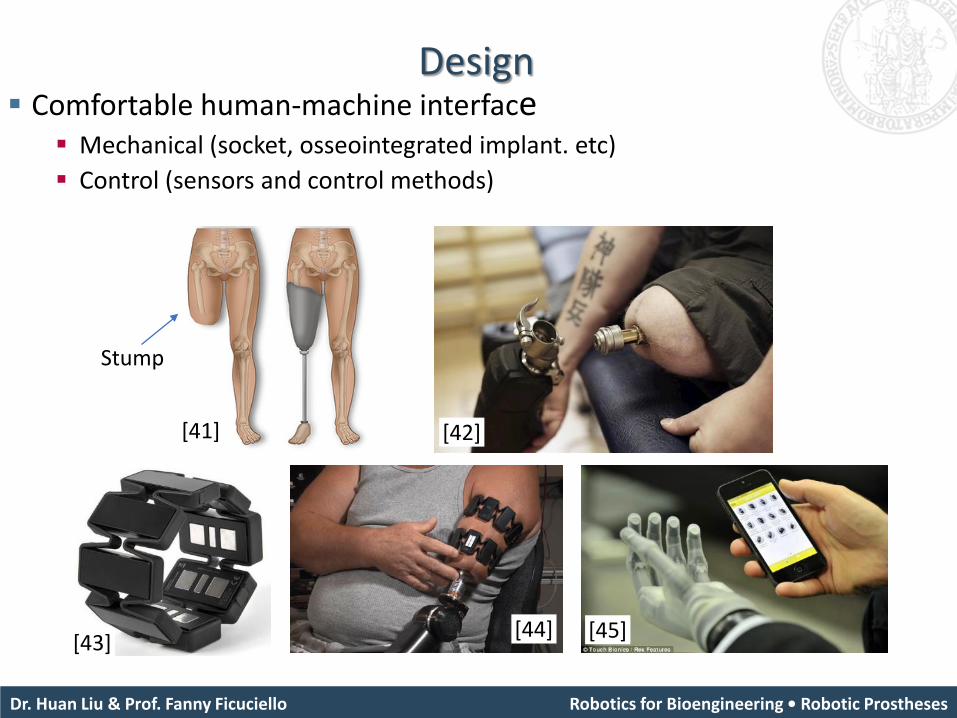
Stump
Design Comfortable human-machine interface
Mechanical (socket, osseointegrated implant. etc) Control (sensors and control methods)
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
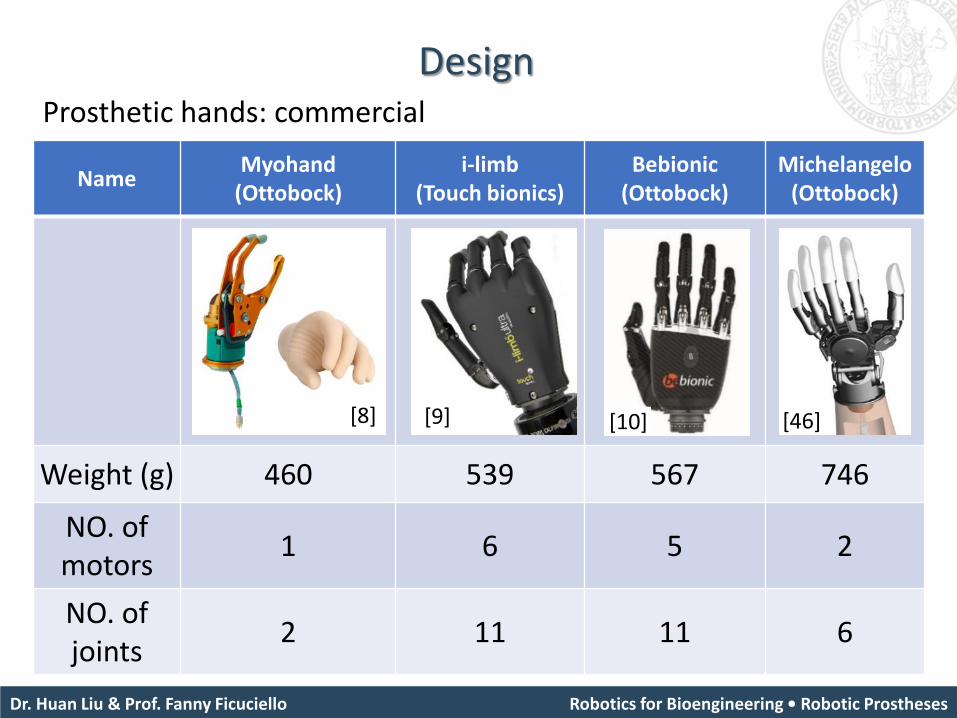
Prosthetic hands: commercial
Name Myohand(Ottobock)
i-limb(Touch bionics)
Bebionic(Ottobock)
Michelangelo(Ottobock)
Weight (g) 460 539 567 746
NO. of motors 1 6 5 2
NO. of joints 2 11 11 6
[8] [10] [46][9]
Design

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Prosthetic hands: Institutional
Future direction: Maximizing dexterity/functionality while reducing weight and number of motors
Gosselin PISA/IIT SoftHand RIC arm SSSA-MyHand Xu
Date 2008 2014 2016 2017 2017
Weight (g) unknown About 600 unknown unknown 470
NO. of motors 1 1 2 3 1
NO. of joints 15 19 8 10 11
[35] [48] [49][47]
Design

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Content Introduction Classification Design Sensing Actuation A research case

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Prosthesis EnvironmentUserSensing Sensing
Sensing Sensing human intention
Myoelectric Inertial sensor Others
Sensing the environment Tactile sensor Others

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
[50]
[51]
Sensing Myoelectric/electromyographic (EMG) sensor
EMG signal: Once a muscle is electrically or neurologically activated, an electricpotential is generated by the muscle cells.
Advantages: Non-invasive, low-cost (for surface EMG)
Disadvantages: Susceptible to interference Interference between muscle signals Muscle fatigue

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Simple on-off control Myo armband, Thalmic Labs Inc. [43]
Video: https://youtu.be/ma0cxk05IcE
Video: https://www.youtube.com/watch?v=oWu9TFJjHaM
Sensing Myoelectric control
Typical method: On–off myoelectric control Proportional myoelectric control Pattern recognition-based myoelectric control

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
IMU Foot Control of the LUKE arm [52]
[53]
Sensing
Inertial sensor/Inertial Measurement Unit (IMU) Gyroscope (measuring orientation and angular velocity)
Accelerometer (measures proper acceleration)

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Environment sensor Tactile sensors: measures force/torque information from physical interaction
with its environment
Resistive Optical etc.
The SynTouch fingertip [55]
Conductive Piezoelectric
The Allegro hand [54] Optical tactile sensor [56]
Sensing

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Content Introduction Classification Design Sensing Actuation A research case

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
[57] [58]
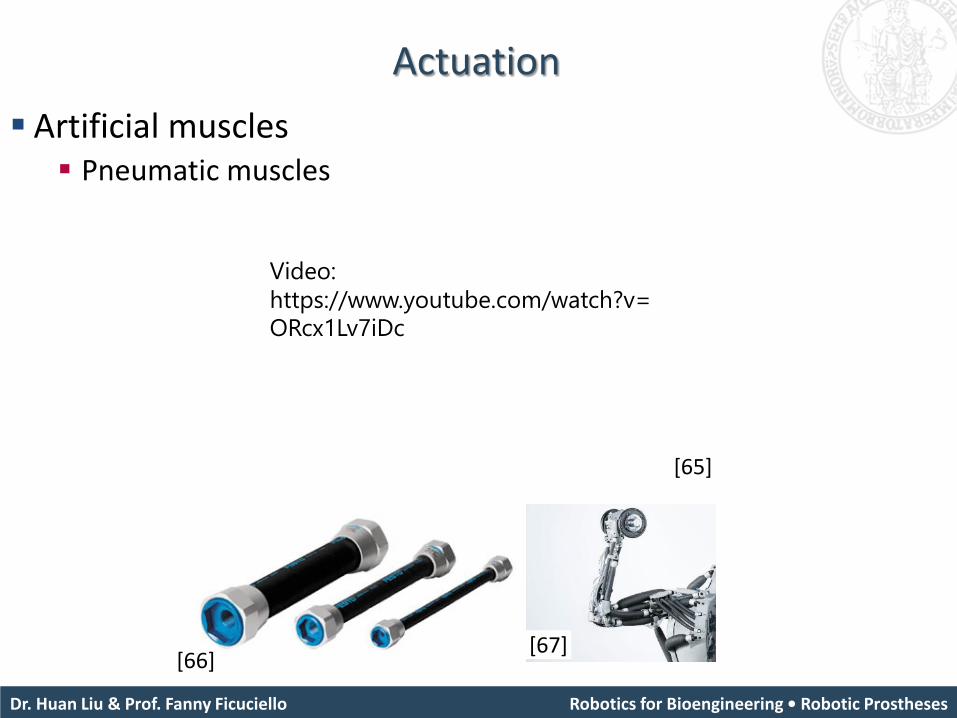
Actuation Electromagnetic Motor (most commonly used) Pneumatic/hydraulic cylinders Artificial muscle:
Shape Memory Alloys (SMA) Pneumatic muscles

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Actuators: Electromagnetic motor Compact High efficiency (> 90%)
Excellent control performance Fast torque response
Maxon DC motor [59]
Gearbox
Motor
Encoder[60]
Actuation

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
The Delft cylinder hand [62]
[61]
Actuation Pneumatic/hydraulic cylinders Advantages
high power/force Disadvantages
pumps and valves are hard to be integrate in a anthropomorphic design Fluid leak

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
[64][63]
Video:https://www.youtube.com/watch?v=vAU8DM8LaS4
Actuation Artificial muscles Shape Memory Alloys (SMA)
Advantage: smooth, silent operation and compact size Disadvantage: slow operating speed
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
[65]
[66][67]
Video:https://www.youtube.com/watch?v=ORcx1Lv7iDc
Actuation Artificial muscles Pneumatic muscles
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
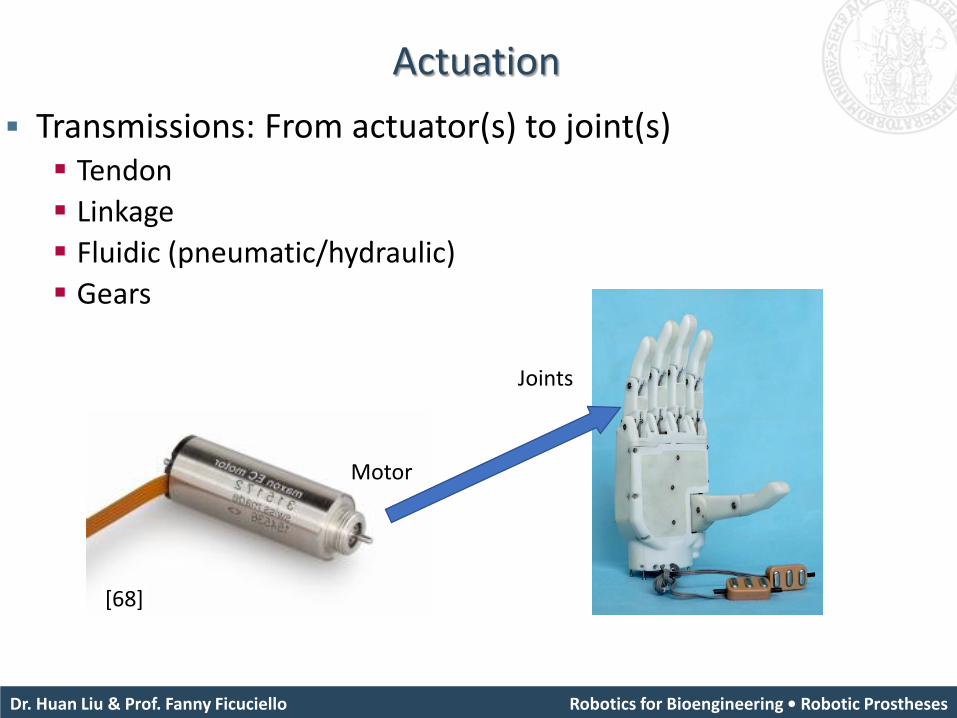
Motor
[68]
Joints
Actuation Transmissions: From actuator(s) to joint(s) Tendon Linkage Fluidic (pneumatic/hydraulic) Gears

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Transmission in prosthetic hands
Hand by Gosselin [34]1 actuator, 15 joints
Hand by Dollar [69]1 actuator, 11 joints
TUAT/Karlsruhe Hand [70]1 actuator, 15 joints
Hand by Yasuhisa [71]1 actuator, 15 joints
Hand by Gosselin [35]1 actuator, 15 joints
Pulley-based Linkage-based

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Gripper by Begoc [72]1 actuator, 6 joints
Delft Hand [27]1 actuator, 7 joints
SARAH Hand [73]2 actuator, 11 joints
Fluidic T-pipe-based Gear-based
Transmission in prosthetic hands

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Content Introduction Classification Design Sensing Actuation A research case

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
sEMGsensors
CDM
Control Unit
Switch
80mm
200mm
Weight: 470g
Batteries
MotorClutch
Variable Transmission
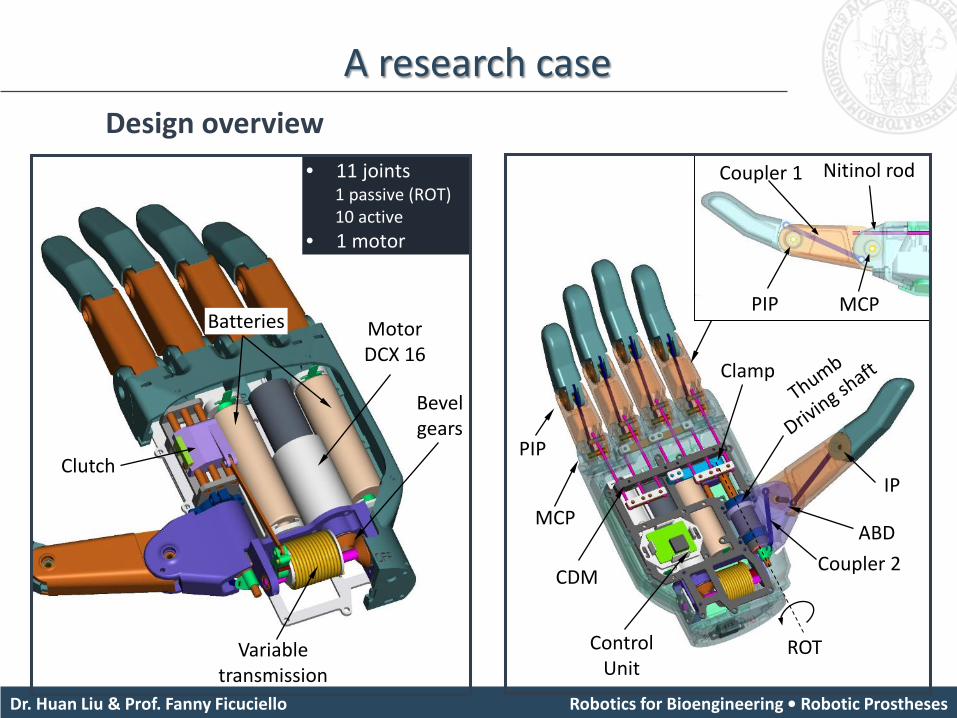
• 11 joints
• 1 motor
Overview
• Myoelectric-controlled
• All component in a anthropomorphic shape
A research case
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Design overview
Batteries MotorDCX 16
Bevelgears
Variable transmission
Clutch
• 11 joints1 passive (ROT)10 active
• 1 motor
CDM
PIP
MCPIP
ABD
Control Unit
ROT
Coupler 2
Coupler 1 Nitinol rod
PIP MCP
Clamp
A research case

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Continuum Differential Mechanism (CDM) [74]
End Link
Base Link
Input backbone
af af
Output backbones
Planar CDM
Base Link
Input backbone
Output backbones
End Link
af
af
Spatial CDM
• Compact • Simple
• Lightweight • ······
A research case

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
• Compact • Simple• Lightweight • ······
End Link
Base Link
Input backbone
af af
Output backbones
Planar CDM
Base Link
Input backbone
Output backbones
End Link
af
af
Spatial CDM
Video:https://www.youtube.com/watch?v=ORcx1Lv7iDc
A research case

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
The 2-stage CDM
Driving backbone
Driven backbones
S
Stage-1
Stage-2
Drivenbackbones
End linkof Stage-1
Driving backbone
Base link
Clamp
End link of Stage-2
Generated bent shapes
Palm
Thumb driving shaft
A research case
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
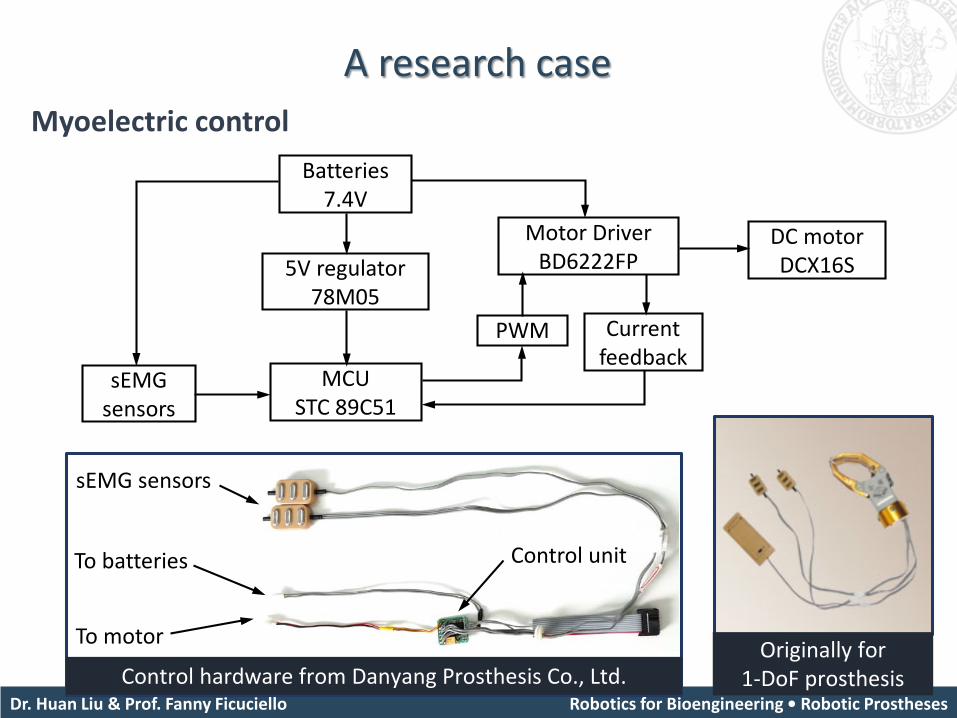
Myoelectric control
Originally for 1-DoF prosthesis
Batteries7.4V
5V regulator78M05
DC motorDCX16S
MCUSTC 89C51
sEMGsensors
Motor DriverBD6222FP
PWM Current feedback
Control hardware from Danyang Prosthesis Co., Ltd.
sEMG sensors
To motor
To batteries Control unit
A research case

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Grasping capabilities
DC power supplier
Switch
End links of Stage-2
End link of Stage-1Base link
Lateral grasps
Pinch grasps
Power grasps
Experimental setup
A research case

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Grasp force measurements
0.2 0.4 0.6 0.8 1 1.2 1.4 1.60
5
10
15
20
25
30
Current(A)
Forc
e(N
)
Power grasp
Five-finger pinch
Tripod pinch Power
5-fingered
Tripod
A research case
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
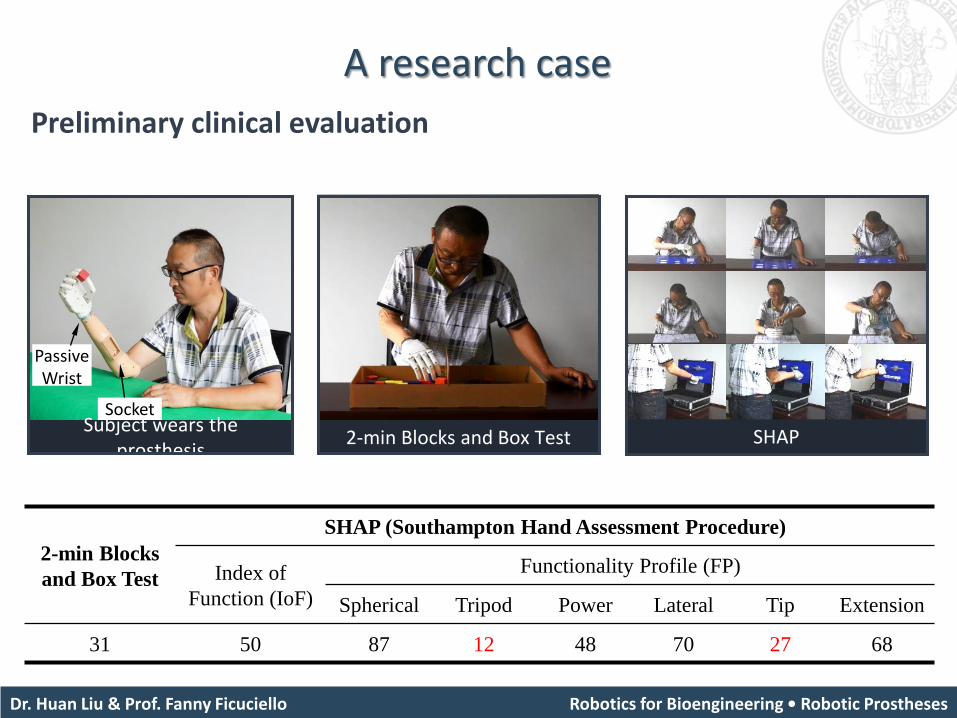
Preliminary clinical evaluation
Socket
2-min Blocks and Box Test
SHAP (Southampton Hand Assessment Procedure)
Index of Function (IoF)
Functionality Profile (FP)
Spherical Tripod Power Lateral Tip Extension
31 50 87 12 48 70 27 68
PassiveWrist
Subject wears the prosthesis 2-min Blocks and Box Test SHAP
A research case

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Preliminary clinical evaluation
Video:https://www.youtube.com/watch?v=V_ufjzSPu-w&t=41s
A research case

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Video: https://www.youtube.com/watch?v=3YLwTJMyoB8
A research case
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
Hugh HerrProfessor at MIT
Mountain climber Double transtibial amputee
Working on robotic prosthesis
A story
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
1. Experimental observations on human reaching motion planning with and without a reduced mobility2. Development of a lower limb rehabilitation exoskeleton based on real-time gait detection and gait tracking3. https://www.cgstudio.com/3d-model/male-crash-test-dummy-5009234. https://www.slideshare.net/stesaf/types-of-joint-worksheet5. https://www.livescience.com/59581-ancient-prosthetic-toe-found-in-egyptian-grave.html6. The evolution of functional hand replacement: From iron prostheses to hand transplantation7. https://av.tib.eu/media/122608. Ottobock Myohand9. i-Limb Hand10. Ottobock Bebionic Hand11. JHU-APL hand, revolutionizing prosthesis 200912. Huichan Zhao13. DEKA14. RIC15. Bebionic16. I-digits17. partial hand solutions, LLC. http://www.partialhandsolutions.com/18. Helix 3D https://www.ottobockus.com/Prosthetics/lower-limb-prosthetics/solution-overview/helix-hip-system/19. C-Leg 4 https://www.ottobock.co.uk/prosthetics/lower-limb-prosthetics/prosthetic-product-systems/c-leg-4/20. http://www.albertaoandp.com/transtibial-below-knee21. http://www.partial-foot-amputation.com/en/home/long-term-fitting/what-is-a-partial-foot-prosthesis/22. https://www.smithsonianmag.com/smart-news/study-reveals-secrets-ancient-cairo-toe-180963783/23. http://www.1-handed.com/en/page/i-limb-prosthesis24. Shadow hand25. Air muscle. https://seniordesign.engr.uidaho.edu/2011-2012/tensegrityrobot/concepts.html26. An Experimental Powered Lower Limb Prosthesis Using Proportional Myoelectric Control
References
Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
27. An Experimental Powered Lower Limb Prosthesis Using Proportional Myoelectric Control28. Delft cylinder hand29. JTP hand30. https://www.ottobockus.com/prosthetics/lower-limb-prosthetics/solution-overview/x3-prosthetic-leg/31. ReMotion Knee32. https://www.youtube.com/watch?v=a9E0uHvfEcI33. https://en.wikipedia.org/wiki/Oscar_Pistorius34. https://www.ossur.com/prosthetic-solutions/products/sport-solutions/cheetah35. 15 DoF hand gosselin36. Programable hand gosselin37. Deimel, R. and O. Brock (2015). "A novel type of compliant and underactuated robotic hand for dexterous
grasping." International Journal of Robotics Research 35(1): 161-185.38. https://www.pinterest.com/pin/258816309810082717/39. Kim, Y.-J. (2017). "Anthropomorphic Low-Inertia High-Stiffness Manipulator for High-Speed Safe Interaction." IEEE
Transactions on Robotics 33(6): 1358-1374.40. https://www.1stdibs.com/furniture/more-furniture-collectibles/collectibles-curiosities/leather-prosthetic-arm-
hook-ring-circa-1920/id-f_3957363/41. https://emanthi-news.blogspot.it/2018/01/woman-receives-bionic-hand-with-sense.html42. http://stadnicki-daniel.com/index.php/2018/04/18/co-to-jest-amplifikacja-above-knee/43. https://www.prostheticbody.com/percutaneous-osseointegrated-prostheses-for-amputees/44. https://www.myo.com/45. http://br.kimiq.com/myo-bracelet/46. https://innprosthetics.com/patients/technology/47. Ottobock Michelangelo hand48. PISA/IIT Hand49. Ric arm50. SSSA-Myhand51. https://qph.fs.quoracdn.net/main-qimg-d540c9db64b2d896ac5e22471c5df870-c52. http://medchrome.com/wp-content/uploads/2010/06/electromyographyemg.jpg
References

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
53. Delft cylinder hand54. JTP hand55. https://www.ottobockus.com/prosthetics/lower-limb-prosthetics/solution-overview/x3-prosthetic-leg/56. ReMotion Knee57. https://www.youtube.com/watch?v=a9E0uHvfEcI58. https://en.wikipedia.org/wiki/Oscar_Pistorius59. https://www.ossur.com/prosthetic-solutions/products/sport-solutions/cheetah60. 15 DoF hand gosselin61. Programable hand gosselin62. Deimel, R. and O. Brock (2015). "A novel type of compliant and underactuated robotic hand for dexterous
grasping." International Journal of Robotics Research 35(1): 161-185.63. https://www.pinterest.com/pin/258816309810082717/64. Kim, Y.-J. (2017). "Anthropomorphic Low-Inertia High-Stiffness Manipulator for High-Speed Safe Interaction." IEEE
Transactions on Robotics 33(6): 1358-1374.65. https://www.1stdibs.com/furniture/more-furniture-collectibles/collectibles-curiosities/leather-prosthetic-arm-
hook-ring-circa-1920/id-f_3957363/66. https://emanthi-news.blogspot.it/2018/01/woman-receives-bionic-hand-with-sense.html67. http://stadnicki-daniel.com/index.php/2018/04/18/co-to-jest-amplifikacja-above-knee/68. https://www.prostheticbody.com/percutaneous-osseointegrated-prostheses-for-amputees/69. https://www.myo.com/70. http://br.kimiq.com/myo-bracelet/71. https://innprosthetics.com/patients/technology/72. Ottobock Michelangelo hand73. PISA/IIT Hand74. Ric arm75. SSSA-Myhand76. https://qph.fs.quoracdn.net/main-qimg-d540c9db64b2d896ac5e22471c5df870-c77. http://medchrome.com/wp-content/uploads/2010/06/electromyographyemg.jpg78. http://www.mobiusbionics.com/luke-arm/#section-three
References

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
79. https://www.ittgroup.ee/en/sensors-and-accessories/965-inertial-measurement-unit-imu-mpu-9250.html80. http://www.simlab.co.kr/Allegro-Hand-Quote-Request.htm81. The SynTouch fingertip [55]82. Force/tactile sensor for robotic applications83. The Prensilia hand84. Shadow hand Air muscle version85. https://mediaserver.responsesource.com/press-release/27431/maxon-DCX-GPX-ENX-cut_4.jpg86. Belter, J. T., et al. (2013). "Mechanical Design and Performance Specifications of Anthropomorphic Prosthetic Hands:
A Review." J Rehabil Res Dev 50(5): 599-618.87. https://www.cpi-nj.com/what-is-a-linear-actuator/88. Smit, G., et al. (2015). "The Lightweight Delft Cylinder Hand: First Multi-Articulating Hand That Meets the Basic User
Requirements." IEEE Transactions on Neural Systems and Rehabilitation Engineering 23(3): 431-440.89. https://www.youtube.com/watch?v=vAU8DM8LaS490. Characteristics Analysis and Testing of SMA Spring Actuator91. https://www.youtube.com/watch?v=ORcx1Lv7iDc92. http://www.hydraulicspneumatics.com/other-technologies/it-looks-piece-hose-its-pneumatic-tensile-actuator93. https://www.festo.com/group/en/cms/10247.htm94. Maxon Dc motor95. Belter, J. T. and A. M. Dollar (2013). Novel differential mechanism enabling two DOF from a single actuator:
Application to a prosthetic hand. Rehabilitation Robotics (ICORR), 2013 IEEE International Conference on.96. Fukaya, N., et al. (2000). Design of the TUAT/Karlsruhe Humanoid Hand. Intelligent Robots and Systems,
2000.(IROS 2000). Proceedings. 2000 IEEE/RSJ International Conference on, IEEE.97. Yasuhisa, K. and M. Takashi (2008). Underactuated Five-finger Prosthetic Hand Inspired by Grasping Force
Distribution of Humans. 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems.
References

Dr. Huan Liu & Prof. Fanny Ficuciello Robotics for Bioengineering • Robotic Prostheses
98. Begoc, V., et al. (2007). Mechanical design of a new pneumatically driven underactuated hand. Robotics andAutomation, 2007 IEEE International Conference on, IEEE.
99. Laliberté, T., et al. (2002). "Underactuation in robotic grasping hands." Machine Intelligence & Robotic Control 4(3):1-11.
100. Xu, K. and H. Liu (2016). "Continuum Differential Mechanisms and Their Applications in Gripper Designs." IEEETransactions on Robotics 32(3): 754-762.
References