prof. kristofer s.j. pister’s team berkeley sensor and actuator center university of california,...
TRANSCRIPT

Prof. Kristofer S.J. Pister’s teamBerkeley Sensor and Actuator Center
University of California, Berkeley

Prof. Kristofer S.J. Pister’s teamBerkeley Sensor and Actuator Center
University of California, Berkeley
Part IVInertial Measurement and Control
Ankur Mehta

3
Outline
• GINA hardware overview• Sensing capabilities• Actuation capabilities• Inertial state estimation• Feedback control
wsn.eecs.berkeley.edu

4
Outline
• GINA hardware overview• Sensing capabilities• Actuation capabilities• Inertial state estimation• Feedback control
wsn.eecs.berkeley.edu

5
GINA board: “back”
wsn.eecs.berkeley.edu

6
GINA board: “back”
wsn.eecs.berkeley.eduTI MSP430F2618 : 16 bit 16 MHz microprocessor

7
GINA board: “back”
wsn.eecs.berkeley.eduAtmel AT86RF231 : 802.15.4 compliant 2.4GHz radio
8
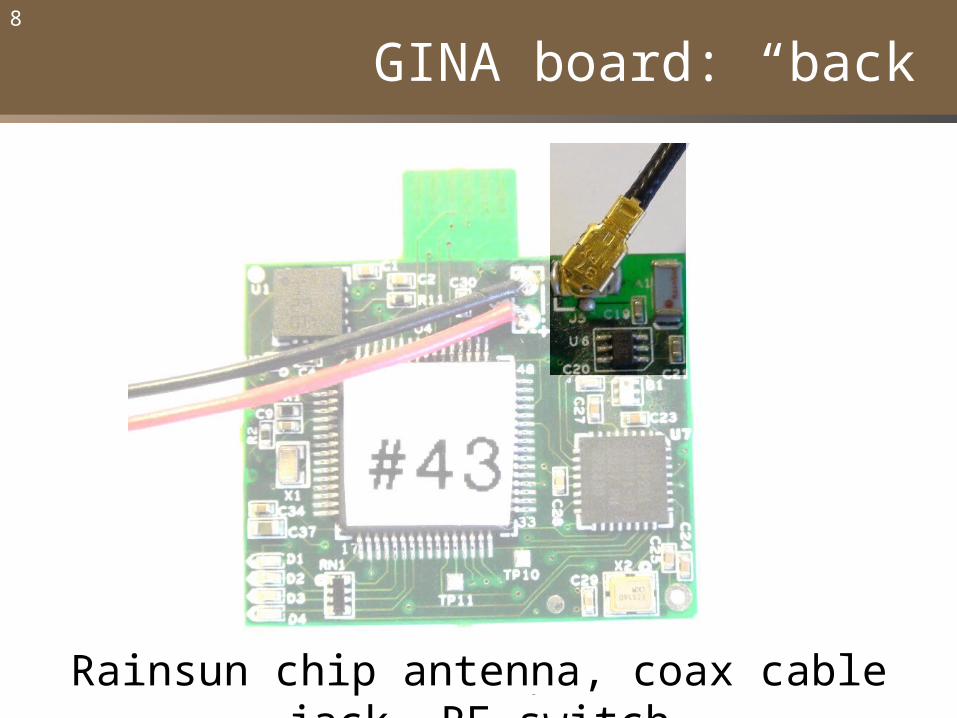
GINA board: “back”
wsn.eecs.berkeley.eduRainsun chip antenna, coax cable jack, RF switch

9
GINA board: “back”
wsn.eecs.berkeley.eduST Micro LIS344ALH : Sensitive, low noise analog XL

10
GINA board: “back”
wsn.eecs.berkeley.eduDebugging LEDs

11
GINA board: “back”
wsn.eecs.berkeley.edu32 kHz, 16 MHz crystals

12
GINA board: “front”
wsn.eecs.berkeley.edu

13
GINA board: “front”
wsn.eecs.berkeley.eduKionix KXSD9-1026 : Large range +/- 8g digital XL

14
GINA board: “front”
wsn.eecs.berkeley.eduInvensense ITG3200 : Digital gyroscope
15
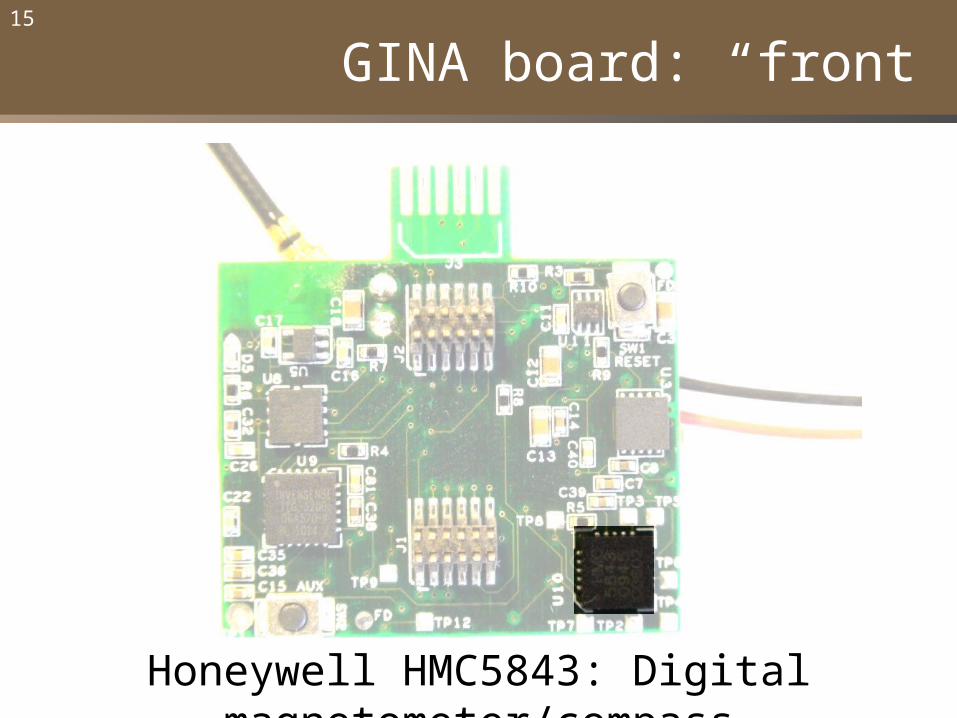
GINA board: “front”
wsn.eecs.berkeley.eduHoneywell HMC5843: Digital magnetometer/compass

16
GINA board: “front”
wsn.eecs.berkeley.eduTI TMP20: Analog temperature sensor
17
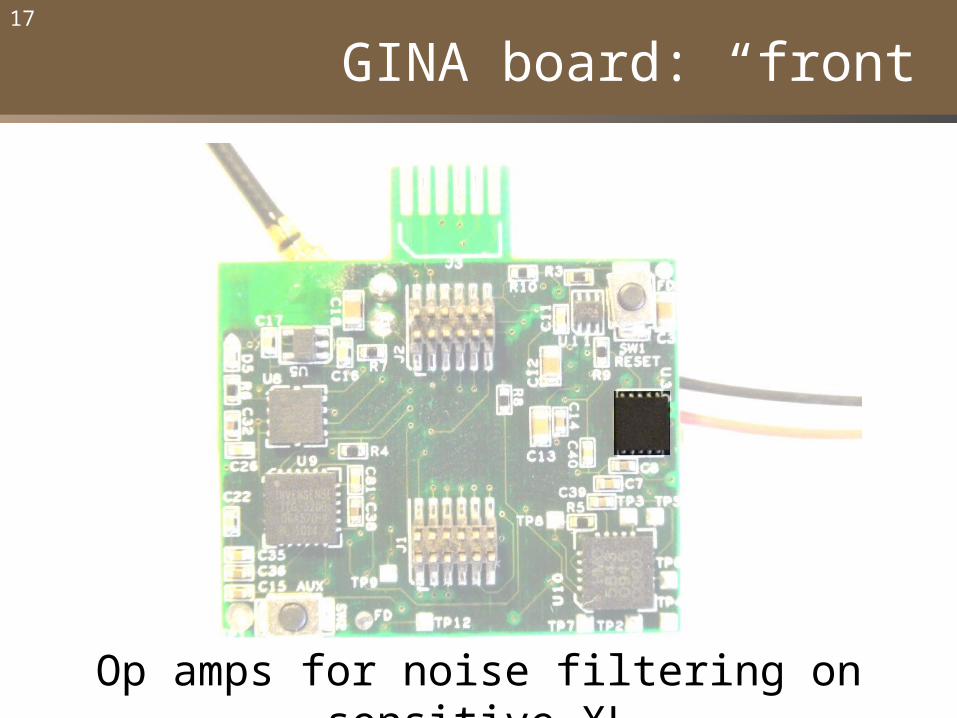
GINA board: “front”
wsn.eecs.berkeley.eduOp amps for noise filtering on sensitive XL

18
GINA board: “front”
wsn.eecs.berkeley.edu3V LDO linear regulator

19
GINA board: “front”
wsn.eecs.berkeley.eduReset, auxiliary user input switches
20
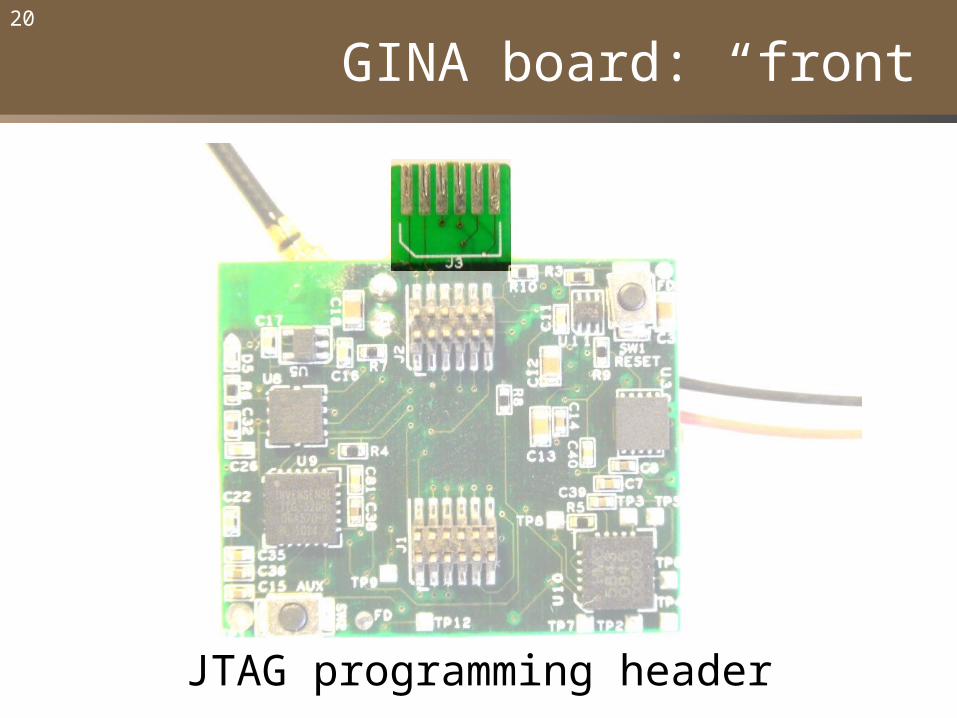
GINA board: “front”
wsn.eecs.berkeley.eduJTAG programming header

21
GINA board: “front”
wsn.eecs.berkeley.eduExpansion headers

22
Power Consumption
TX+g
yro+m
ag+x
l+adc
TX+g
yro+x
l+adc
TX+x
l+adc
TX+a
dc
radio tx
radio id
le
radio sle
epLP
M3
90.979.8
55.8 54.9 54.3
7.4 4.2 1.5
GINA 2.2b/c Power Consumption
AveragePower (mW)
16 MHz clock, 3 ms instrumentation loop
wsn.eecs.berkeley.edu
23
Outline
• GINA hardware overview• Sensing capabilities• Actuation capabilities• Inertial state estimation• Feedback control
wsn.eecs.berkeley.edu

24
GINA main board sensors
• Large range accelerometer• Gyroscope• Magnetometer• Sensitive accelerometer • Temperature sensor
wsn.eecs.berkeley.edu

25
Exposed interfaces
• Analog input pin• Digital GPIO• Serial communication– I2C– SPI–UART
wsn.eecs.berkeley.edu

26
Additional sensors
• GPS (UART)• Battery meter (I2C)• Infrared camera (I2C)• Video camera (SPI)• Hydrogen Sulfide sensor (Analog)• ???
wsn.eecs.berkeley.edu

27
Sensor calibration
Accelerometer Gyroscope
wsn.eecs.berkeley.edu
28
Outline
• GINA hardware overview• Sensing capabilities• Actuation capabilities• Inertial state estimation• Feedback control
wsn.eecs.berkeley.edu

29
Actuator controllers
• Hardware based PWM outputs–Processor configurable–10 (3 + 7) channel output–Can drive servos, brushless or brushed
motors, SMA actuators?• Digital GPIO pins• Serial interfaces
wsn.eecs.berkeley.edu

30
Servo actuation

31
Motor actuation

32
Motor actuation

33
Outline
• GINA hardware overview• Sensing capabilities• Actuation capabilities• Inertial state estimation• Feedback control
wsn.eecs.berkeley.edu

34
Inertial navigation
• Extended Kalman filter state estimator–3DOF pose: attitude / orientation
• Additional sensor fusion–6DOF position
• Offboard or onboard computation
wsn.eecs.berkeley.edu

35
Inertial navigation
• Kalman filter state estimator
wsn.eecs.berkeley.edu
36
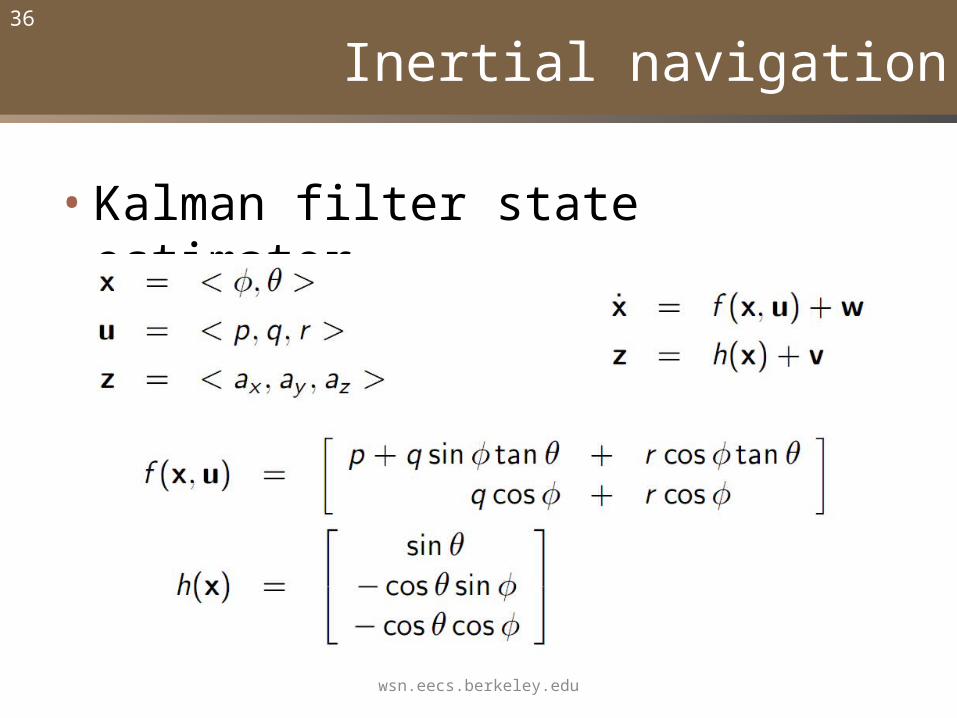
Inertial navigation
• Kalman filter state estimator
wsn.eecs.berkeley.edu

37
Inertial navigation
• Kalman filter state estimator
wsn.eecs.berkeley.edu

38
Motion Capture

39
Outline
• GINA hardware overview• Sensing capabilities• Actuation capabilities• Inertial state estimation• Feedback control
wsn.eecs.berkeley.edu

40
Feedback control
wsn.eecs.berkeley.edu

41
wsn.eecs.berkeley.edu
Feedback control

42
Feedback control
wsn.eecs.berkeley.edu

43
Feedback control
wsn.eecs.berkeley.edu

44
Prof. Kristofer S.J. Pister’s teamBerkeley Sensor and Actuator Center
University of California, Berkeley