programmable valves enable both precision motion …byao/research/eh/programmable...programmable...
TRANSCRIPT

1
Programmable Valves Enable Both Precision Motion Control and Energy Saving
Dr. Bin Yao
Purdue UniversityWest Lafayette, IN 47907, USA

2
Outline
Development of Programmable Valves
Control of Programmable Valves
On-board Modeling of Valve Flow Mapping
Programmable Valves Bypass Sandwiched Deadband Problem
Summary

3
Outline
Development of Programmable Valves
Control of Programmable Valves
On-board Modeling of Valve Flow Mapping
Programmable Valves Bypass Sandwiched Deadband Problem
Summary
4
E/H precision motion control system
Objective:Performance Energy efficiencyCost
To reduce energy usage:Reduce the supply pressure Ps(t)Reduce the pump flow rate Qs(t)
Energy usage:

5
To reduce supply pressure …Must break the mechanical linkage between the meter-in and meter –out orifices
Arne Jansson and Jan-Ove Palmberg, "Separate controls of meter-in and meter-out orifices in mobile hydraulic systems", SAE Transactions, Vol.99, Sect 2, pp377-383, 1990
Meter-in and meter-out orifice areas are coupled in 4-way directional control valves
Cannot control all cylinder states (pressures of both chambers)
Deadband for PDC valves
Leakage for servo valves
desired
motion

6
Dual-Valve Meter-in and Meter-out
J.A. Aardema, Caterpillar Inc., "Hydraulic circuit having dual electrohydraulic control valves", United States Patent 5,568,759, 1996
Two valves:Patented by:
J. Ardema, 1996
Uses two directional control valves to meter flows

7
Four-Valve Meter-in and Meter-out
Aardema and Koehler, Caterpillar Inc., "System and method for controlling an independent metering valve", United States Patent 5,947,140, 1999
Four valves
J. Ardema and D. Koehler
Uses four poppet valves to independently control meter-in and meter-out flows

8
Five-Valve Meter-in and Meter-out
Ruth Book and Carrol E. Goering , "Programmable electrohydraulic valve", SAE Vol. 1, No. 2, pp28-34, 1999
Same functionality as IMVs only

9
Use Regeneration Flow
Garnjost, K. D., "Energy-conserving regenerative-flow valves for hydraulic servomoters", United States Patent 4,840,111, 1989
Regeneration Valve
Patented by:K. Garnjost, 1989.
Uses one additional valve to provide regenerative flow for energy saving but cannot control both chambers independently
10
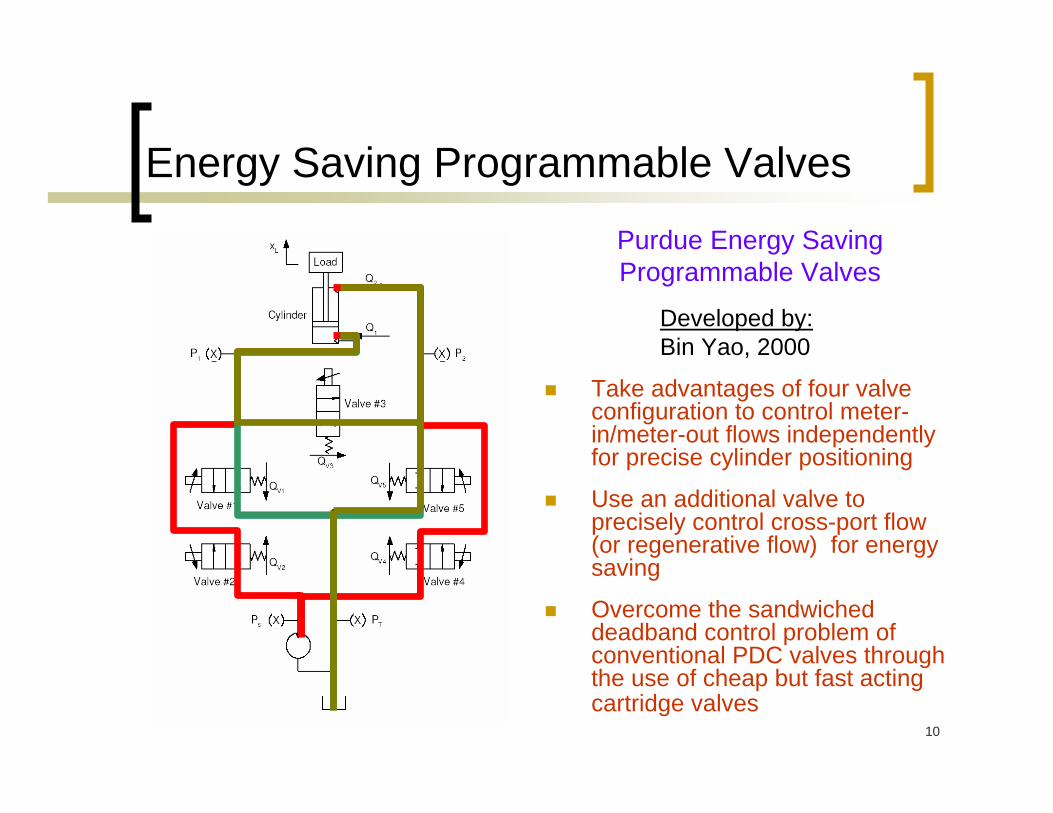
Energy Saving Programmable Valves
Purdue Energy SavingProgrammable Valves
Developed by:Bin Yao, 2000
Take advantages of four valve configuration to control meter-in/meter-out flows independently for precise cylinder positioning
Use an additional valve to precisely control cross-port flow (or regenerative flow) for energy saving
Overcome the sandwiched deadband control problem of conventional PDC valves through the use of cheap but fast acting cartridge valves

11
Programmable Valves Advantages
Fully decoupled meter-in and meter-out flowFully controlled true cross port regeneration flowMore flexibility and controllabilityCompletely solve/bypass the sandwiched deadband problem of EH systems controlled by closed-center valvesVirtually eliminate leakageFaster response than PDC valvesLow costLow maintenance cost

12
OutlineDevelopment of Programmable ValvesControl of Programmable Valves
ChallengesTwo-level control systemComparative experimental results
On-board Modeling of Valve Flow MappingProgrammable Valves Bypass Sandwiched Deadband ProblemSummary
13
Challenges
Multi-input dual-objective systemLack for accurate mathematical model of cartridge valvesCoordination of the five cartridge valvesHighly nonlinear hydraulic dynamicsLarge parameter variationsUncertain nonlinearities such as external disturbances, flow leakage and seal frictions

14
Nonlinear Valve Flow Mapping
),(1vivivivi QPfu ∆= −

15
Control of Programmable Valves
Schematic of the two-level Control System

16
Two-level Control System
Task level (Working Mode Selection)Proper hydraulic circuitryOptimal valve configuration for maximal energy saving
Valve level (ARC Control)Nonlinear model based design to take the system nonlinearities into account explicitlyAdaptive model compensation to reduce the effects of parametric uncertainties and disturbancesRobust feedback to guarantee stability

17
Working Mode Selection ---Tracking Task
18
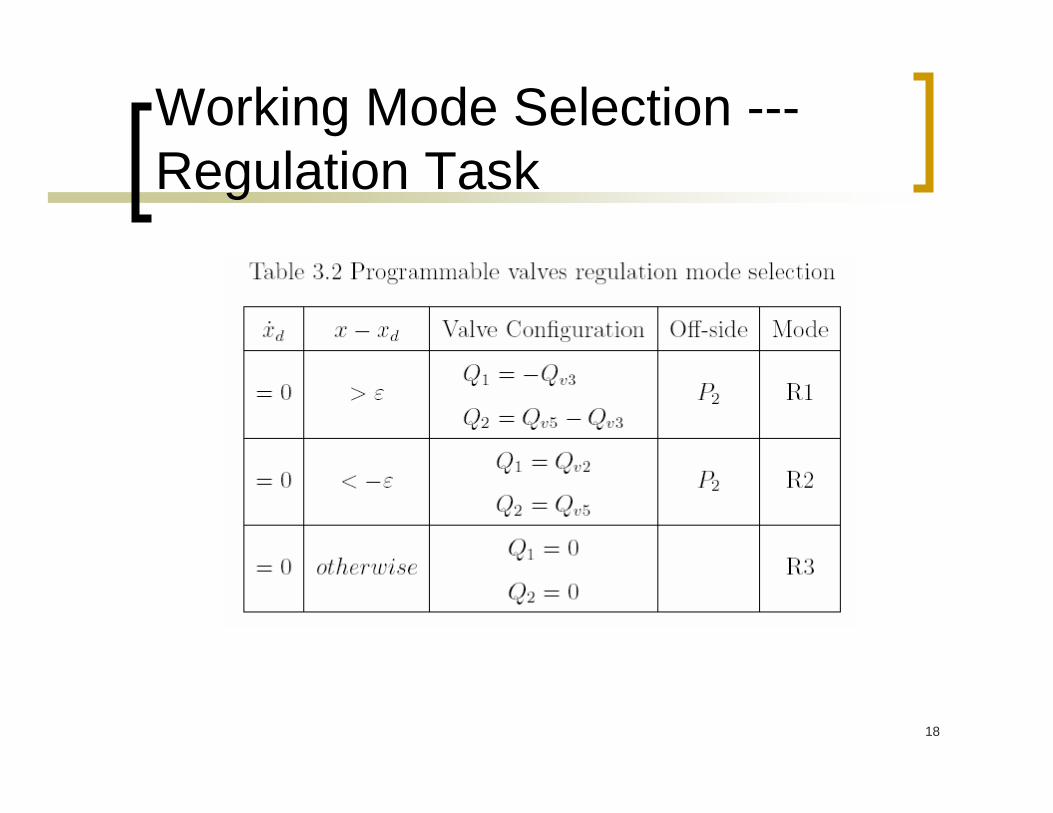
Working Mode Selection ---Regulation Task

19
Mode T1
Desired Cylinder Velocity > 0Desired Cylinder Force >0
Uses Valve #2 and Valve #5Maintain P2 as Low as Possible
Cylinder
Valve #2
Load
Valve #5
Valve #4
Valve #3
Valve #1
XL
Q 2
Q 1
P1
P2
PS PT
Q V2
Q V5
Extend Resistive-FLoad

20
Mode T3
Desired Cylinder Velocity < 0Desired Cylinder Force >0P1 >P2
Uses Valve #3 and Valve #5Maintain P2 as Low as Possible
Cylinder
Valve #2
Load
Valve #5
Valve #4
Valve #3
Valve #1
XL
Q 2
Q 1
P1
P2
PS PT
Q V1
Q V2
Q V5
Q V4
Q V3

21
Valve-Level Control --- Adaptive Robust Controller
Nonlinear model based controller designCompensate known nonlinearities and disturbancesGuarantee stability and prescribed transient performance in the presence of unmodeleduncertainties and external disturbancesAchieve asymptotic stability in the absence of disturbance
22
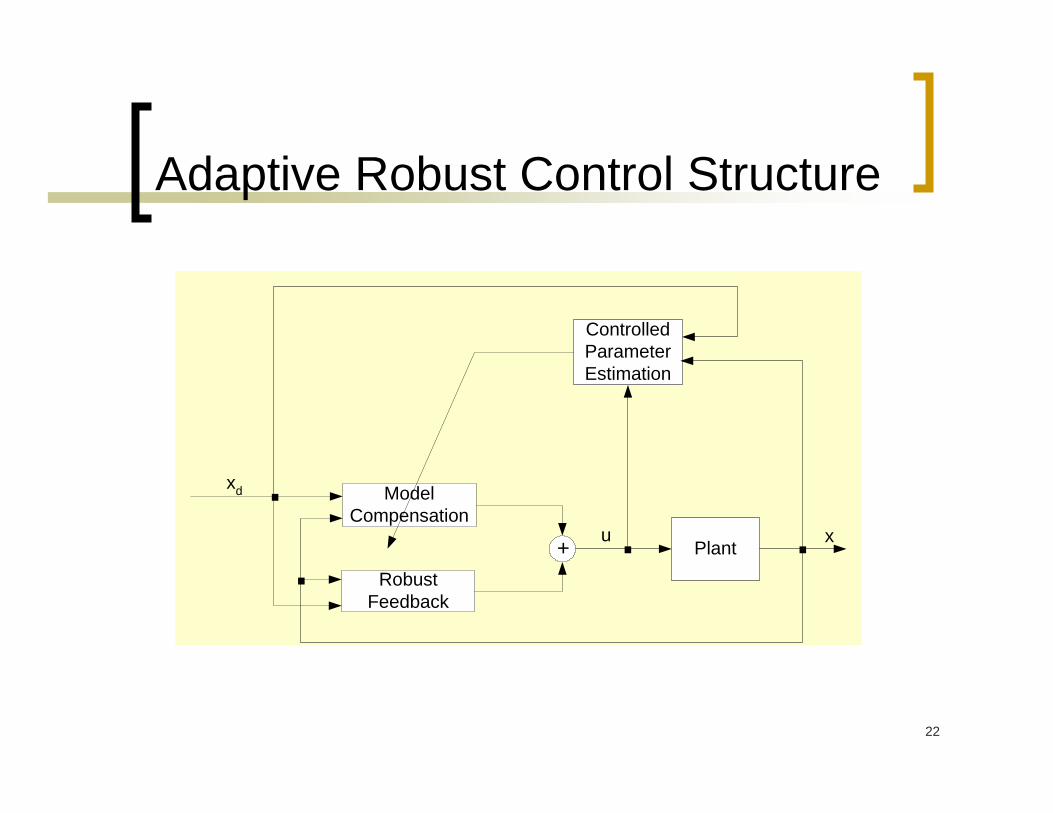
Adaptive Robust Control Structure
Plant
ControlledParameterEstimation
ModelCompensation
RobustFeedback
+ u x
xd
...
.

23
Valve-Level Control
Off-side pressure regulatorMaintain the off-side chamber at a constant low pressure
Working-side motion controllerControl the working-side pressure so that the desired trajectory is followed as close as possible
Flow distributionconvert flow commands to valve voltage input signals
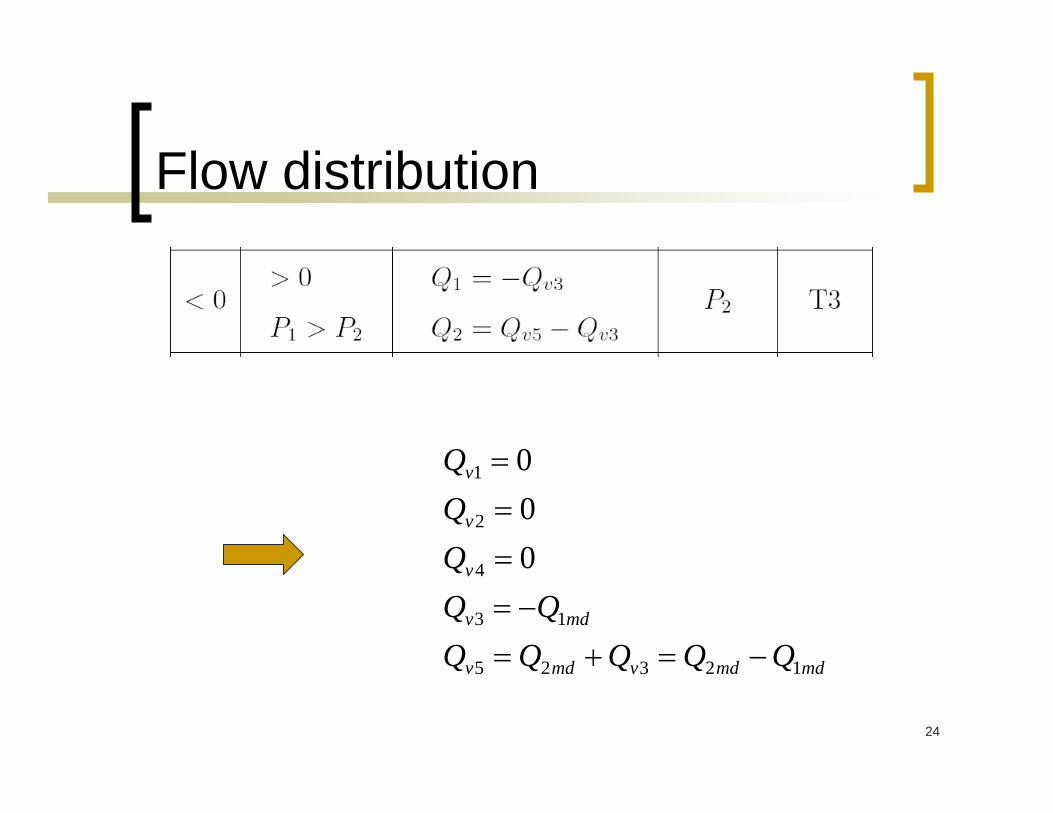
24
Flow distribution
mdmdvmdv
mdv
v
v
v
QQQQQQQ
QQQ
12325
13
4
2
1
000
−=+=−=
===

25
Flow distributionInverse flow mapping to convert flow commands to valve voltages input signals

26
Experimental Setup

27
Smooth Working Mode Switching

28
Comparative Experiment•PDC valveVickers KBFDG4V-5-2C50N-Z-PE7-H7-10
•Servo valveParker BD760AAAN10
•Programmable valves Vickers EPV10-A-8H-12D-U-10

29
Comparison of Performance
1e
2e e
∞
0.00360.00100.0007Prog
0.00510.00180.0014Srv
0.01460.00460.0030PDC

30
Comparison of Cylinder Force

31
Comparison of Cylinder Pressures

32
Comparison of Energy Usage, Constant Supply Pressure Ps=1000psi
32.4 KJ
32.7KJ
21.3KJ34% less than PDC35% less than Servo

33
Comparison of Energy UsagePs=Working Pressure + 500KPa
20.9 KJ
19.3KJ
6.4KJ69% less than PDC67% less than Servo

34
OutlineDevelopment of Programmable ValvesControl of Programmable ValvesOn-board Modeling of Valve Flow Mapping
Problem formulationLocalized basis functions and smooth blendingOn-board modeling Comparative experimental results
Programmable Valves Bypass Sandwiched Deadband ProblemSummary

35
Cartridge Valve Flow Mapping
Individually calibrated flow mapping (2002-2003)AccurateOff-board test, time consuming, additional calibration equipments, not suitable for industrial application
Manufacture supplied flow mapping (2004)Ready to useInaccurate, large modeling error exists, system performance compromised
Automated on-board modeling of cartridge valve flow mapping (2004-2005)
Accuracy & easy implementation

36
Modeling of Cartridge Valve Flow Mapping
Unknown nonlinear function

37
Flow Rate Observer based on Cylinder Pressure Dynamics
On-board Modeling of Cartridge Valve Flow Mapping --- Observer Approach
),( vivivi PufQ ∆=
Known Control Signal
Measurable

38
On-board Modeling of Cartridge Valve Flow Mapping
Huge number of basis functions and weighting factorsLimited experimental dataDynamic flow rate unavailable

39
Cylinder Dynamics Based Estimation
Cylinder dynamics:

40
Why localized estimation?
Invertibility

41
Localized Basis

42
Localized Estimation
PE condition is easily satisfied in small local region rather than globallyEstimation error can be controlled by checking the condition number instead of invertibilityDiscontinuity may happen at the block borders
Extrapolation

43
Smooth Blending

44
Automated On-board Modelling of Valve Flow Mapping

45
On-line EstimationOn-line, Swiped sinusoidal trajectory, 0.1Hz~0.5Hz over 80sec.
0 1 1.51.7522.252.52.7533.253.53.754 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
6.5
7
7.5
Pre
ssur
e D
rop
−−
− M
Pa
Control Input −−− Volt
Blocks and Locations of Simulation Data
Estimated
Calibrated

46
Off-line Estimation
02
46
810
0
2000
4000
6000
80000
5
10
15
20
25
30
35
Valve Input − Volt
Estimated Flow Mapping
Pressure Drop − KPa
Vol
umat
ric F
low
Rat
e −
LP
M
Adjust

47
Comparison of Different Flow Mappings
0 2 4 6 8 10 12
0
0.2
0.4
0.6
0.8
1
Des
ired
Mot
ion
− r
adComparative Tracking Results with Different Flow Mappings
Disired Motion Trajectory
0 2 4 6 8 10 12−0.02
−0.01
0
0.01
0.02
Tra
ckin
g E
rror
− r
ad
Time − sec
Calibrated Flow Mapping Estimated Flow Mapping Manufacture Flow Mapping
48
Outline
Development of Programmable Valves
Control of Programmable Valves
On-board Modeling of Valve Flow Mapping
Programmable Valves Bypass Sandwiched Deadband Problem
Summary

49
EH system controlled by a closed-center valve

50
What is sandwiched deadband
PlantDynamics
Valve Dynamics
Control Input
Spool Displacement
Actual Valve Orifice Opening
System Output
Actuator dynamics can
not be neglected
51
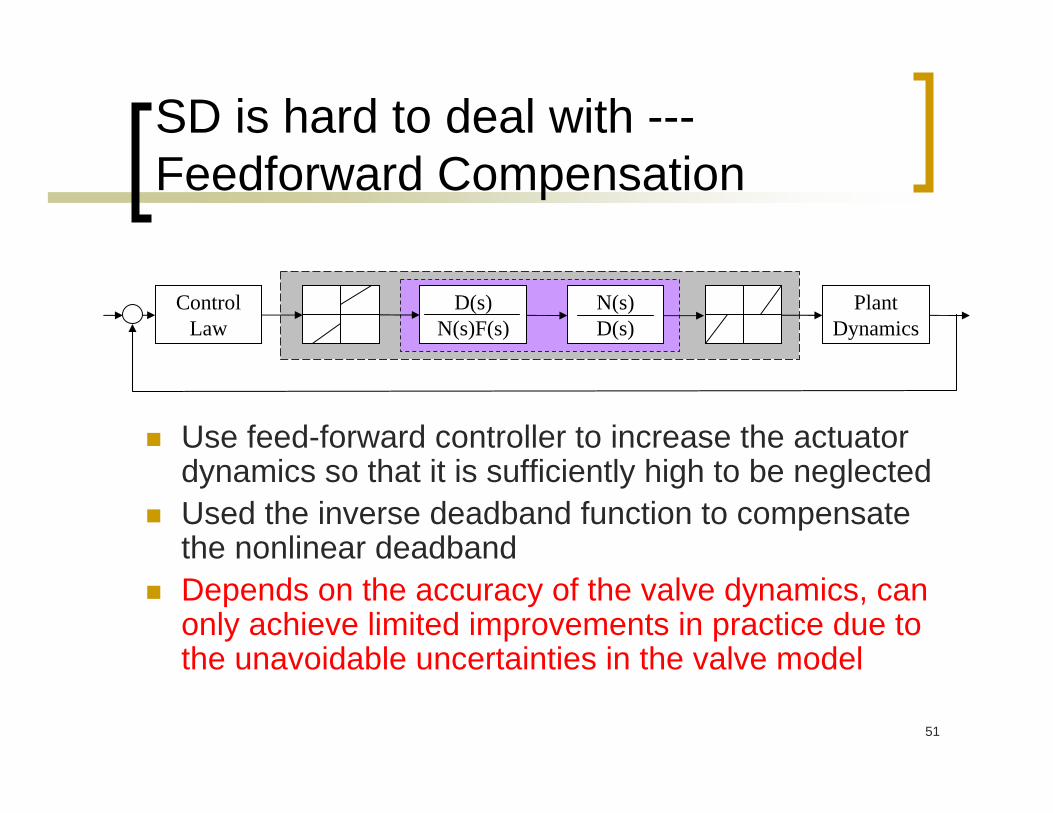
SD is hard to deal with ---Feedforward Compensation
Use feed-forward controller to increase the actuator dynamics so that it is sufficiently high to be neglectedUsed the inverse deadband function to compensate the nonlinear deadbandDepends on the accuracy of the valve dynamics, can only achieve limited improvements in practice due to the unavoidable uncertainties in the valve model
PlantDynamics
ControlLaw
D(s)N(s)F(s)
N(s)D(s)

52
SD is hard to deal with ---Feedback Compensation
Use local high gain feedback control to attenuate the deadbandRequire actuator output/state feedback. Significantly increases system cost.Sometimes actuator output/state signals are too noisy to help increasing the bandwidth significantly.
PlantDynamics
ControlLaw
N(s)D(s)
ActuatorControl

53
SD simple solution ---Direct Compensation
Simply neglect valve (spool) dynamicsEconomical, easy to implementLimit cycle may happen if closed loop bandwidth is not low enough Closed loop system is usually conservative, i.e., bandwidth is limited quite low in order to safely neglect valve dynamics
PlantDynamics
Valve Dynamics
ControlLaw

54
Deadband of poppet-type cartridge valves
The input signal has to be large enough to overcome the spring force and static friction.

55
Deadband Compensation of Poppet Valve
Input deadband is easier to compensateCartridge valve dynamics is much more faster than PDC valves.

56
Outline
Development of Programmable Valves
Control of Programmable Valves
On-board Modeling of Valve Flow Mapping
Programmable Valves Bypass Sandwiched Deadband Problem
Summary

57
Conclusions
Eliminate the mechanical linkage between the meter-in and meter-out orifices and enable accurately using the cross port regeneration flow for a controlled motion.Energy saving can be achieved without sacrificing precision motion performance.The two-level control system successfully control the system to achieve the dual objectives.Sandwiched deadband in EH systems can be bypassed by the programmable valves.Promising alternatives of conventional four-way valves in precision motion control.
58
Acknowledgement
Formal Students:
Dr. Song LiuChris Deboer
Past Caterpillar Collaborators:
John LitherlandDoug KoehlerJ. Ardema

59
AcknowledgementsAcknowledgementsSponsors:
National Science FoundationCAREER Grant CMS-9734345Regular Grant CMS-0220179
Purdue Electro-Hydraulic Research Center
Valve Donations by:
Department of Mechanical Engineering, Purdue UniversityDepartment of Mechanical Engineering, Purdue UniversityDepartment of Mechanical Engineering, Purdue University

60
ReferencesBin Yao and C. Deboer, “Energy-saving adaptive robust motion control of single-rod hydraulic cylinders with programmable valves”, the American Control Conference, pp4819-4824, Alaska, May, 2002
S. Liu and Bin Yao, “Energy-saving control of single-rod hydraulic cylinders with programmable valves and improved working mode selection”, the SAE Transactions – Journal of Commercial Vehicle, SAE 2002-01-1343, pp51-61, 2002
S. Liu and Bin Yao, "Programmable Valves: a Solution to Bypass DeadbandProblem of Electro-Hydraulic System", the American Control Conference, pp4438-4443, Boston, 2004.
Liu and Bin Yao, "Characterization and Attenuation of of Sandwiched Deadband Problem of Electro-Hydraulic Systems Controlled by Closed-Center Valves using Describing Function Analysis", the ASME International Mechanical Engineers Congress and Exposition (IMECE), IMECE2004-60946, pp1-8, 2004
S. Liu and Bin Yao, "Adaptive Robust Control of Programmable Valves with Manufacture Supplied Flow Mapping Only", the IEEE Conference on Decision and Control, pp1117-1122, 2004.

61
ReferencesS. Liu and Bin Yao, "Automated Modelling of Cartridge Valve Flow Mapping", the IEEE/ASME Conference on Advanced Intelligent Mechatronics (AIM'05), pp789-794, Monterey, California, 2005.
(Winner of the Best Student Paper Competition)