project gulfstream curtis christiansen jordan hodge jordan lyford troy mills wilson schreiber...
Post on 20-Dec-2015
224 views
TRANSCRIPT

Project Gulfstream
Curtis ChristiansenJordan HodgeJordan Lyford
Troy MillsWilson Schreiber
Project Gulfstream
Curtis ChristiansenJordan Hodge Jordan Lyford
Troy Mills
Wilson Schreiber

Agenda
• Background• Problem Statement• Solution Statement• System Overview• Design
o Mechanicalo Electricalo Software
• Assignments• Schedule• Budget

Background
Many barns that contain livestock require some method to contain the animal waste and make it easy to clean Wood shavings are typically spread to make cleanup easier

Problem Statement
Wood shavings may make cleanup easier, but it is still tedious.The shavings still need to be collected and removed.
Solution Statement
Our solution consists of
• Autonomously driven vehicle with a vacuum source to collect the material
• Spiraling navigation • Material collection storage area, with an auger disposal • Docking station for disposal (HomeBase)
For prototyping purposes, we are planning on testing and demonstrating the device in a controlled, "Lab" setting

System Overview
Vacuum Pump
Storage Bin
Vacuum Hose
Auger Out(when full & docked)
Mobility Platformw/ Micro-controller and on-board power
Collection Manifold
Sensors A: HomeBase Receiver B: Bin Full Sensor C: Bin Empty Sensor D-E: Obstacle Sensors
HomeBase Transmitter

Mechanical

Mechanical

Current Design - Mechanical
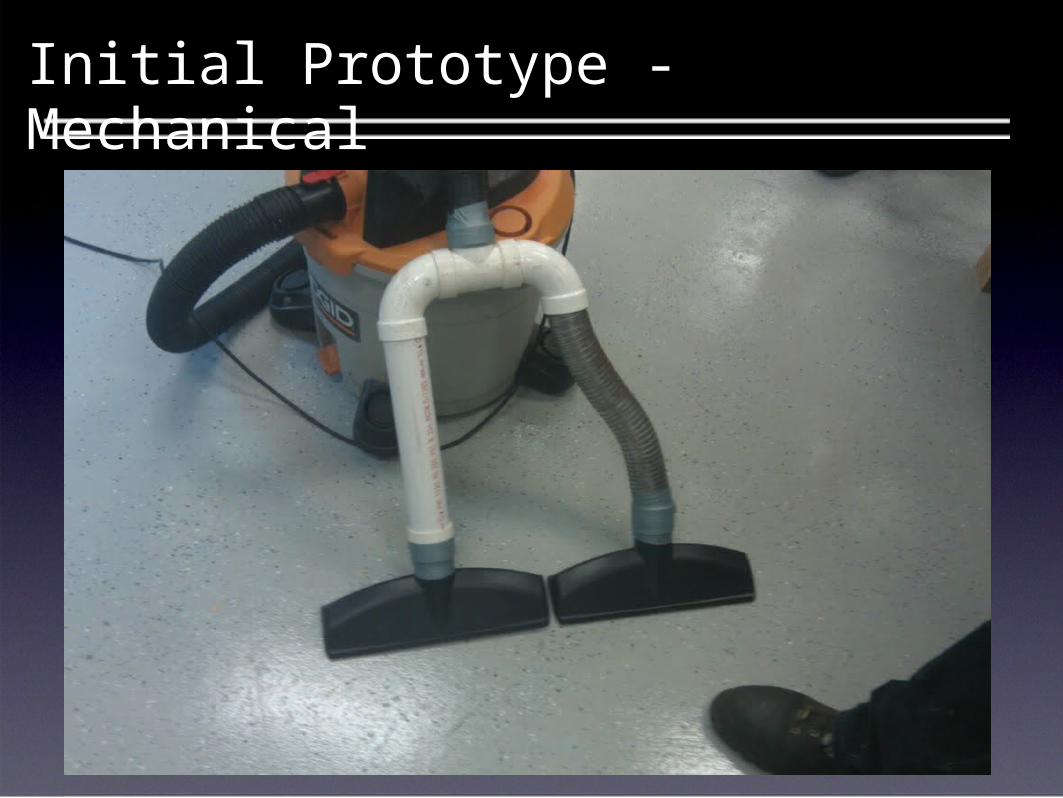
Initial Prototype - Mechanical

Electrical

Electrical - Bin Full Sensor
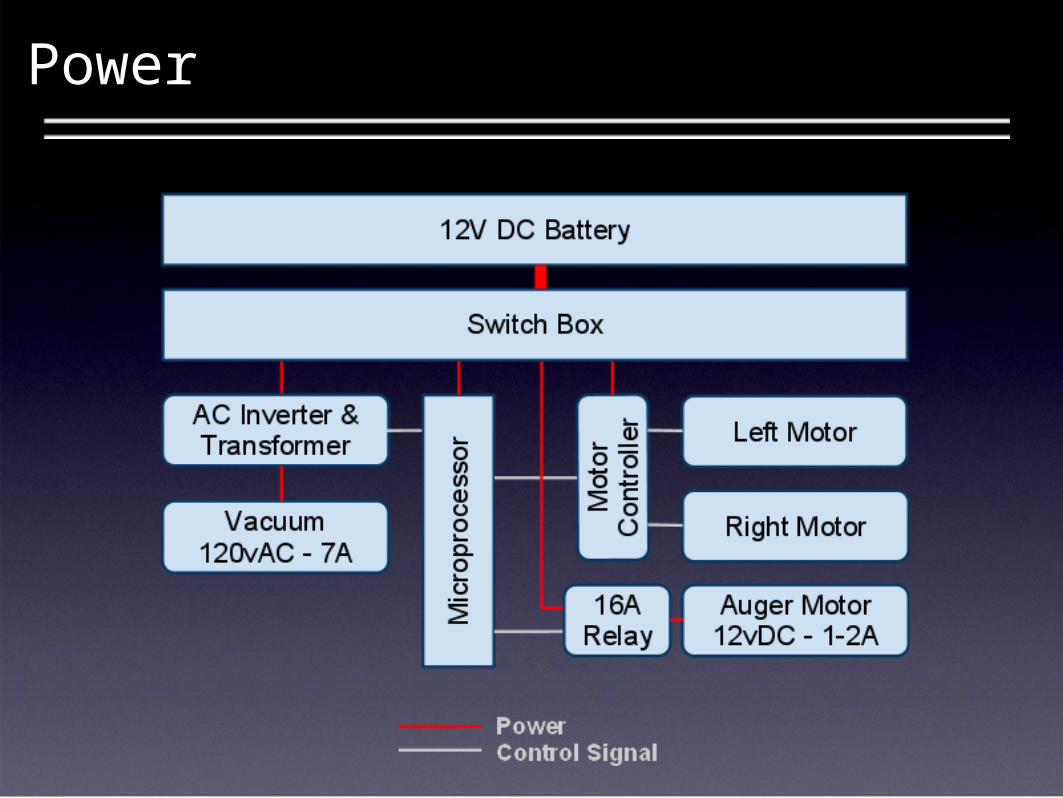
Power

Power - Inverter
Ratings (120vAC)560W Continuous
700W for 5-Minutes1000W Surge

Design Concepts - HomeBase

Design Concepts - HomeBase

HomeBase - Transmitter

Design Concepts - Navigation Software

System Overview - Navigation

System Overview - Navigation


if (Run_Autonomous) { if (Run_Autonomous == 2) { LeftMotorDuty = +30; RightMotorDuty = +75; Set_Left_Motor_Duty_Cycle (LeftMotorDuty); Set_Right_Motor_Duty_Cycle (RightMotorDuty); spiral_count = 350; Start_Motors(500); Run_Autonomous = 3; }
if (Run_Autonomous == 3) { if(spiral_count == 0) { ++LeftMotorDuty; Set_Left_Motor_Duty_Cycle (LeftMotorDuty); Set_Right_Motor_Duty_Cycle (RightMotorDuty); if (LeftMotorDuty == (RightMotorDuty-1)) { Stop_Motors(); LeftMotorDuty = 0; RightMotorDuty = 0; Set_Left_Motor_Duty_Cycle (LeftMotorDuty); Set_Right_Motor_Duty_Cycle (RightMotorDuty); Run_Autonomous = 0; }
Start_Motors(500); spiral_count = 350; //Defines the change in radius per unit step of duty cycle
Navigation Software - Spiral

Navigation Software - Implementation

Current Assignments
• Troy: Bin, Auger• Hodge: Navigation, CAD• Lyford: Vacuum, HomeBase software• Curtis: Obstacle detection software, CAD, Scoop• Wilson: Navigation, Bumper

Schedule
• Week 1 (8/30 - 9/3)o Brainstorming, Vacuum Testing, Sensor Bumper, MARV Wiring
• Week 2 (9/7 - 9/10)o MARV Training & Testing, Further concept development, Vacuum testing
• Week 3 (9/13 - 9/17)o MARV Navigation, Power systems, Vac. testing, Bin/Auger prototypes
• Week 4 (9/20 - 9/24)o MARV Nav., Bin construction, Implement nav. sensors, Vacuum testing
• Week 5 (9/27 - 10/1)o MARV Navigation, Bin construction, Mount vacuum and scoops
• Week 6 (10/4 - 10/8)o MARV Navigation, Implement bin sensors, Final mounting
• Week 7 (10/18 - 10/22)o Engineering Verification and Testing, Problem corrections
• Week 8 (10/25 - 10/29)o Engineering Verification and Testing, Problem corrections

Preliminary Budget
• Auger - $20• Vacuum Accessories - $40• Stock - $50• Fittings and Fasteners - $30• Bin - $25• Sensors - $60
Total - $225

Expenses

Questions