remaining useful life time of gas compressor in kollness field
TRANSCRIPT

Remaining Useful Life Time of GasCompressor in Kollness Field
Mariska Septiana Putri
Reliability, Availability, Maintainability and Safety (RAMS)
Supervisor: Anne Barros, MTP
Department of Mechanical and Industrial Engineering
Submission date: June 2017
Norwegian University of Science and Technology


RAMS
Reliability; Availability Maintainability, and Safety
Remaining Useful Lifetime of Gas
Compressor in Kollness Field
Mariska Septiana Putri
June 11, 2017
TPK 4950
RELIABILITY, AVAILABILITY, MAINTAINABILITY, AND SAFETY
MASTER’s THESIS
Department of Production and Quality Engineering
Norwegian University of Science and Technology
Supervisor 1: Anne Cecile Pénélope Barros
Supervisor 2: Erling Lunde

ii

iii
Preface
This is a report for thesis in master program of RAMS (Reliability,
Availability, Maintainability, and Safety) within the Department of Production
and Quality Engineer at NTNU (Norwegian University of Science and
Technology). The report is a continuation work from specialization project
and is established in spring semester 2017.
The thesis discusses a topic that related to creation of Markov process models
with various maintenance strategies to calculate the availability of gas
compressors so that we can estimate residual lifetime or remaining useful
lifetime (RUL) for the system in STATOIL’s plant, Kollness.
This report is written for RAMS students who want to learn more about
methods or tools that can be used to estimate RUL of a system with more than
one phase.
Trondheim, 11 June 2017
Mariska Septiana Putri

iv

v
Summary
This thesis contains information related to models that are established to
calculate availability of a system using Markov process. The system that we
study for this report is gas compressors that are operated by STATOIL and
located in Kollness - Norway. STATOIL has six gas compressor trains that
are made up from assembly unit of one variable speed drive, one unit of
electrical motor, one unit of gear box, and one unit of gas compressor. The
main goal of the project is to build models that are capable to represent the
actual condition of the system with different possible maintenance strategies.
The models are developed start from a simple and basic condition until the
involvement of degradation states. We will also discuss how an early treatment
such as preventive maintenance toward degraded units will give big impact to
system’s performance.

vi
vii
Contents Preface ...................................................................................................................... iii
Summary .................................................................................................................... v
Chapter 1 .................................................................................................................... 1
Introduction ............................................................................................................... 1
1.1 Background .................................................................................................... 1
1.2 Objectives....................................................................................................... 2
1.3 Limitations and Assumption .......................................................................... 3
1.4 Approach ........................................................................................................ 3
1.5 Structure of the Report .................................................................................. 3
Chapter 2 .................................................................................................................... 5
Study Literatures ........................................................................................................ 5
2.1 Gas Compressor System................................................................................. 5
2.1.1 Definition ...................................................................................................... 5
2.1.2 Failure Mode ................................................................................................. 7
2.2 Remaining Useful Lifetime ........................................................................... 10
2.3 Markov Process ............................................................................................ 11
2.3.1 Introduction ................................................................................................ 11
2.3.2 Multiphase Markov Process ........................................................................ 12
Chapter 3 .................................................................................................................. 15
Maintenance Models ............................................................................................... 15
3.1 Markov Process Model without Degradation .................................................... 15
3.1.1 Model without Maintenance ...................................................................... 15
3.1.2 Markov Process Model with Maintenance ................................................. 20
Model 2 ............................................................................................................ 20
Model 3 ............................................................................................................ 23
Model 4 ............................................................................................................ 25
Model 5 ............................................................................................................ 26
Model 6 ............................................................................................................ 27

viii
Model 7 ............................................................................................................ 28
3.1.3 Simulation with Standby Condition ............................................................ 31
Model 8 ............................................................................................................ 31
3.2 Markov Process Model with Degradation Process ............................................ 32
Model 9 ............................................................................................................ 32
Model 10 .......................................................................................................... 34
3.3 Model Recommendation from Availability Comparison ................................... 36
3.4 Model Validation ................................................................................................ 39
Chapter 4 .................................................................................................................. 43
Conclusion ................................................................................................................ 43
Bibliography ............................................................................................................. 57

1
Chapter 1
Introduction
1.1 Background
Gassco and STATOIL, as technical service provider, operate gas processing
plant at Kollness. The gas is transported from Kvitebjørn and Visund [1]
production site to England and France. Right now, six compressor systems are
used to support the transportation process. Each compressor is made of one-
unit electrical motor, one-unit gas compressor, one-unit gear box and one-unit
Variable Speed Drives (VSD). The compressors are working throughout the
year with two different production rates in summer and in winter. Full capacity
production is applied during winter with all six trains of gas compressors are
running. Meanwhile in summer, due to less number of gas demand, not all the
trains are running for their full capacity and possible for some trains to be
standby.
Five (5) out six (6) electrical motors in the system has been used since 1996.
For each machine, there are number of year that it is expected to be available
in supporting the production until finally the machines no longer can give the

2
services. It is also an interest to estimate how long the machines can remain in
service when we already know the current condition of the machines. The
remaining useful lifetime of these machines can be a consideration for making
decision such as when the company need to start preparing process to buy a
new machine and what kind of maintenance strategies that can be implemented
to prolong the machines’ useful life time, etc.
Currently, maintenance for the gas compressor system is done periodically
every summer. There is some consideration to change this maintenance
strategy and there is also a consideration for applying continuous monitoring
by online system so the company can have enough information to avoid
system failure before it happens.
1.2 Objectives
The objectives of this thesis can be described as follow:
1. List all the possible maintenance programs.
2. Estimate mean availability of the system for the chosen scenario in
point 1.
3. Compare all the models based on their mean availability.
4. Estimate remaining useful lifetime of the system with the
implementation of the chosen scenario.
5. Find the proper maintenance program for gas compressor system in
both season, winter and summer.
These outputs can be useful for STATOIL to consider whether they have to
change current maintenance program and a apply continues online monitoring
for the system.

3
1.3 Limitations and Assumption
For this report, there are several limitations that are put into consideration:
1. The values that are used for failure rates for every trains are based on
data from OREDA, not on the actual numbers for the field.
2. For simplicity in modeling different scenarios, two trains of gas
compressor are used instead of the actual total number of the gas
compressor trains in which are six trains.
1.4 Approach
This thesis presents many possibilities on how maintenance program can be
implemented in a system. A system is pictured by process diagram so called
Markov process that shows different stages for each train. To compute
numerical results of the process, MATLAB software is used.
Numerical results from MATLAB computation cover different condition
between two periods of running time, winter and summer. Since during winter
the requirement is higher, all of gas compressors are functioning in their full
capacity. During summer, there are two schemes that are assumed. In some
cases, the whole trains are running in varied capacity depend on demand, and
in other case, some of the trains are treated as standby trains.
The results that we obtain are data regarding availability of the system in
certain time horizon. We can also trace the possibility of the system in
different state that will be useful to determine the remaining useful lifetime of
gas compressor. This information can help the engineer to choose which
maintenance programs that will give more benefit for the company.
1.5 Structure of the Report
The report will consist of four chapters. The first chapter shall cover
introduction of the report, including the background, objectives, limitations,

4
and approach that are used to establish the report. The second chapter will
present some theory related to machines that compose the system as a whole
and introduction theory about remaining useful lifetime and Markov process.
In the third chapter, the report will contain information about several scenarios
of the system with several options of maintenance programs and numerical
results from MATLAB computation regarding availability for each possible
option. In this chapter, we will also present availability comparison from
different software to validate numerical results that we obtain from MATLAB.
The last chapter, chapter 4, will cover the result, some discussion related to
result to make sure all of the points in objectives have been answered. In this
section, further study for the same topic will be discussed as well.
5
Chapter 2
Study Literatures
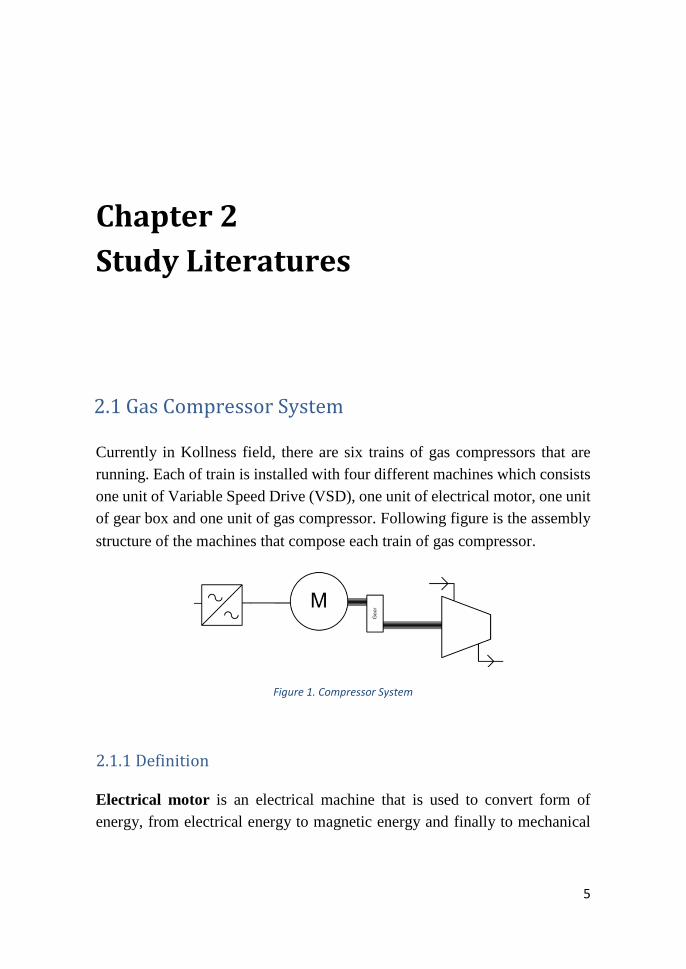
2.1 Gas Compressor System
Currently in Kollness field, there are six trains of gas compressors that are
running. Each of train is installed with four different machines which consists
one unit of Variable Speed Drive (VSD), one unit of electrical motor, one unit
of gear box and one unit of gas compressor. Following figure is the assembly
structure of the machines that compose each train of gas compressor.
Figure 1. Compressor System
2.1.1 Definition
Electrical motor is an electrical machine that is used to convert form of
energy, from electrical energy to magnetic energy and finally to mechanical

6
energy [2]. Generally, electrical motor is formed by several parts such as rotor,
stator, shaft, end bells, bearing and motor housing as showed in Figure 2.
Figure 2. Electrical Motor Structure
Gear Gearbox is mechanical drives with step by step ratio change [2].
Mechanical drive is a unit set of mechanical power transmission that transfers
power from prime mover to the actuator. Gearbox contains several gears.
Gears are transmission mode with meshing or machines with toothed design.
Gears have function to transmit or receive motion from another gear-tooth.
When the gears are meshing with each other, they transmit torque moment, a
force that has tendency to rotate around the axis [3].
Figure 3. Example of Gearbox Design

7
Gas compressor is a method and devices for compressing gas. The gas is
compressed by entering an inlet which is known as Inlet Guide Vanes (IGV)
and accelerated by a row rotating airfoils (blades) called rotors and the
diffused, to obtain a pressure increase, in a row stationary blades called
stator[3]. A combination of a rotor and a stator makes up one stage and there
are several stages in a compressor. Figure 4 is showing the operating principle
for the compressor.
Figure 4. Compressor Components and Operating Principle
2.1.2 Failure Mode
Degradation from each machine will give impact to system’s performance. In
the next section, we will present the summary of several degradation processes
that can increase the failure rate for each component of gas compressor trains.
In table 1 we can see the list of failures that can deteriorate performance of gas
compressor system.

8
Table 1. Degradation Modes for Electrical Motor, Gearbox, and Gas Compressor
Unit Machine Category Faults
Electrical
Motor
Electrical Faults Open or short circuit in
winding
Wrong connection of windings
High resistance contact to
conductor
Unstable ground
Partial discharge
Mechanical Faults Broken rotor bars
Broken magnet
Cracked end-rings
Bent shaft
Bolt loosening
Bearing failure
Gearbox failure
Air-gap irregularity
Outer System Failure Inverter system failure
Unstable current source
Shorted/ Opened supply line
Gear Box Mechanical Faults Gear breakage
Flank damage
Gas
Compressor
Mechanical Faults Fretting
Creep deformation
Hot corrosion
Electrical Motor has three different types of degradation which are electrical
faults, mechanical faults and Outer system failure. Several faults that are

9
common to happen in electrical motor are partial discharge, bearing failure,
and broken rotor bars. Partial discharge (PD) is small electric sparks inside air
bubbles that are formed due to non-uniform electrical distribution on
insulation material [13]. This phenomenon usually happens in stator part of
electrical motor. In excessive electrical stresses, PD can cause change in
material properties to electrochemical reaction [14]. This changing causes
material degradation that eventually will lead to the complete breakdown of
the insulation [15]. Bearing of electrical motor can fail due to several causes
such as misalignment and fatigue that can lead to excessive vibration and
breakage, abrasion on the bearing due to improper lubrication, corrosion, and
contamination.
Gear breakage and flank damage are the main reason for a gear-box to have
decreasing performance. Gear breakage that represent statistically 60% of all
gear damages can be caused due to fatigue in tooth root, unit overload, and
inaccurate mounting that will lead to fracture of the gear. Another 40% of the
cause is flank damage. Flanks damage can happen due to pitting or surface
fatigue, loss of material, and high load that lead to plastic deformation.
Performance of gas compressor is mainly depending on performance of its
turbine blades. The fractures that happen on turbine blades will be unfavorable
for a gas compressor to maintain its performance. Fractures that happen on
turbine blades can be caused by several reasons such as fretting, creep
deformation and hot corrosion. Fretting is a wearing process between two
surfaces that has oscillatory motion with small amplitude [4]. Creep
deformation usually happens under operation condition where it is exposed to
high temperature yet still below the melting point of material. It also is
exposed with high stress level below the yield strength in long period of time
[9]. Turbine blades that are experiencing long high temperature and high stress
will stretch to the state that they will not be flexible anymore (plastic) or
become permanently deformed. Hot corrosion is an accelerated corrosion
process, causes by the existence of salt contaminants such as Natrium Sulfate
(Na2SO4), Natrium Chloride (NaCl), and Vanadium Oxide (V2O5). These
contaminants then are combined and create melted deposits and damage the
protective surface [10].

10
2.2 Remaining Useful Lifetime
The interests in this report are to predict the future failure before it actually
happens and estimate how much longer the machines can give the service
before they reach the end of their functional lifetime. The result from
prediction process or prognostic process can help the engineers to improve
their maintenance policy. It can give a valuable information for engineers to
decide and make plans for their maintenance strategies with better prediction
of future failure, better preparation on spare part components, and better
understanding of residual lifetime of the machines.
According to ISO 13381-1, prognostic is defined as “an estimation of time and
risk for one or more existing and future failure modes. The capability to
provide early detection of the precursor and/or incipient fault condition of a
component, and to have the technology and means to manage and predict the
progression of this fault condition to component failure.” [5] said that “failure
prognosis involves forecasting of system degradation based on observed
system condition”.
RUL as the result from prognostic process is defined as the length from the
current time to the end of the useful life [6]. In general, RUL also can be
formulated as follow [7] :
𝑅𝑈𝐿(𝑡) = 𝑖𝑛𝑓{ℎ: 𝑌(𝑡 + ℎ) ∈ 𝑆𝐿 | 𝑌(𝑡), 𝑌(𝑡) ∉ 𝑆𝐿 } (1)
Where 𝑌(𝑡) is system condition at time t and 𝑆𝐿 is set of failed states of the
unit.
The method of prognostic technique in this report is model-based. Model-
based prognostic methods mainly use the available mathematical or physical
models to picture the progress of the system from the working state to its
failure state. Model-based methods have the advantage to integrate physical
understanding of the system to improve the knowledge for system
degradation. The example of models that are using this approach are Markov
and Semi Markov model, Hidden Markov, Bayesian Network, etc.

11
2.3 Markov Process
2.3.1 Introduction
To solve the existing problems, it will be better if we can translate them into
models that can give description and represent the actual problems properly.
By having models, it will be easier to understand the main focus where we can
make limitations of contribution factors that will be included or not. The
limitations that we set will make the models simpler and allow us to do
experiments with possibility to change their parameters in order to seek the
optimum solution.
Markov chain is one of stochastic process {𝑋 (𝑡), 𝑡 ≥ 0} to model a system by
using states and transition between states [8]. Markov chain has Markov
property which means that the future event depends on the current state, not
its pass history. Variable 𝑋 (𝑡) is a random variable that denotes the state of
system at time 𝑡. Markov chain, based on time, is divided into discrete time
Markov chain and continuous time Markov chain. When time is discrete, it
may take value in {0,1,2,3, . . } or when we denote it by {𝑋𝑛, 𝑛 =
0, 1, 2, . . }. When time is continuous, we call it as continuous time Markov
chain or Markov Process. Markov process can be categorized as homogenous
and non-homogenous process. A model is called homogenous Markov process
when transition from one state to another state does not depend on time.
Otherwise, it will be called as non-homogenous Markov process.
We can start creating Markov process by defining several possible states and
transition rates between states. The simplest state is a state with status as
functioning state and not functioning or failed state. The transition from state
𝑖 to state 𝑗 can be denoted with 𝐴(𝑖, 𝑗). All of the transition rates in one process
then will be organized into a matrix 𝐴.
To know the probability in which state we are at time 𝑡 is always an interest
in Markov process. This is called transient probability that will be denoted
with 𝜇0 for initial state at time 0 and 𝜇𝑡(𝑖) denotes the probability that the

12
system is at state 𝑖 at time 𝑡. To calculate the value of 𝜇𝑡, we can use the
following formula
𝜇𝑡 = 𝜇0 𝑒𝑡𝐴 (2)
2.3.2 Multiphase Markov Process
The models of gas compressor trains will have different characteristics during
summer and winter period. In different periods, the system will have different
parameters of failure rates and these parameters will continuously change from
time to time between summer and winter. In order to depict the models close
to reality, we will use multiphase Markov process.
One summer in the initial year will be denoted by 𝑇1 which will represent time
𝑡 = 0 until 𝑡 = 4380. Winter time is from 𝑡 = 4381 until 𝑡 = 8760 and will be
denoted as 𝑇2. Next summer in second year will be denoted as 𝑇3, and so on.
In other word 𝑇𝑖 is time at which system will have season change. Since the
parameters of transition rates in summer and winter is different, transition
matrix 𝐴 for each phase will be different as well and will change at time 𝑇𝑖 .
To calculate the probability for such process, we can use this following
formula.
𝜇𝑡 = 𝜇0 𝑒𝑡𝐴1 for 𝑡 ∈ [0, 𝑇𝑖] and 𝑇𝑖 = 4380 (3)
Formula above is to calculate probability in operation process at time 𝑡 where
𝑡 starts from 𝑡 = 0 until 𝑡 = 4380, use transition matrix 𝐴1 that contains
transition rates that fit for summer period only. To continue the calculation for
next period, which is winter, we need to change transition matrix 𝐴1 to
transition matrix 𝐴2. Time 𝑡 in winter starts from 𝑡 = 4381 until 𝑡 = 8760.
The probability will be calculated as follow
𝜇𝑡 = 𝜇𝑇1 𝑒(𝑡−𝑇1)𝐴2 = 𝜇0 . 𝑒𝑇1𝐴1 . 𝑒(𝑡−𝑇1)𝐴2

13
for 𝑡 ∈ [4381, 𝑇𝑖] and 𝑇1 = 4380; 𝑇𝑖 for first winter which
is 𝑇𝑖 = 8760 (4)
For probability law at time 𝑡 then we can use formula as follow
𝜇𝑡 = 𝜇0 (∏ 𝑒(𝑇𝑘−𝑇𝑘−1)𝐴𝑘
𝑘=𝑖
𝑘=1
) 𝑒(𝑡−𝑇𝑖)𝐴𝑖+1
(5)
𝑘 denotes the phases.

14

15
Chapter 3
Maintenance Models
3.1 Markov Process Model without Degradation
3.1.1 Model without Maintenance
First model starts with very simple scheme. As is mentioned in the assumption
chapter 1, only two trains of gas compressor are used for the simplicity of the
model. In the beginning, three stages are included to see how long the system
will last from time 𝑡 = 0 until 𝑡 = 𝑇, where 𝑇 is time when all of the trains
are failed. In calculation with MATLAB, we use time horizon for 15 years or
(131400 hours) for 𝑇 to see the trend of the graphic that is created by numerical
results. This duration is used so that the probability to have all the trains failed
is close to 1. The initial state or state one of this Markov process model is a
condition where all the machines are perfect, second state or state two is a
condition where one machine is fail and one machine is still working. There
will be different status for this state in different season. The third state or state
3 is a failure state where both of the machines fail. In this model, there is no
maintenance is involved. For the first model or so called Model-1, is pictured
by Figure 5.
In one year, the trains are treated differently depend on the season, summer
and winter. During winter period, the trains is required to work in full capacity

16
to fulfil the required demand. Any failure in any train will make the whole
system fail since it will not be enough to cover the demand. Meanwhile in
summer, demand decreases. Thus, the structure of the trains during summer
can be varied. First option, all of the trains can be running yet not in full
capacity. Second option, half of the trains are functioning to fulfil the order,
and the rest are off for standby position in case there is a train that is failed
during operation.
Figure 5. Model 1 – Markov Process Model of The System Without Any Maintenance Program
Due to different capacity requirements between summer and winter, second
state of Markov model in both season has different status. It will be
functioning state in summer phase because we can still have option to make
the system work by manipulating the number of trains that need to be occupied
or switching the failed train with standby train or changing the rate of trains’
capacity to fulfil the required demand. Meanwhile during winter, the second
state of Markov model will become a failure state since all of maximum
capacity trains need to be functioning to reach the target. If we look at Model-
1, we notice that there are different colors in second state between summer
phase and winter phase to mark the status differences. First state in both phase
is colored blue to indicate working state. Second state is blue for summer
phase and white for winter. White circle indicates failure state.

17
To distinguish different availability between summer and winter, we make the
model into multiphase Markov model. From figure 5, we can see that there are
two phases of Markov model which are almost similar. First phase is named
summer phase and the other is named winter phase.
In computation using MATLAB, we define different phases of Markov
process with different transition matrix. A1 represents the transition between
states in summer phase only and A2 represents the transition between states in
winter phase only. Transition matrix A1 and A2 have three rows and three
columns corresponding to number of states in each phase. When 𝑎𝑖𝑗 is the rate
when we are leaving state 𝑖 to go to state 𝑗, then transition matrix 𝐴 can be
defined as follow
𝐴 = [
𝑎11 𝑎12 𝑎13
𝑎21 𝑎22 𝑎23
𝑎31 𝑎32 𝑎33
] (6)
For diagonal elements, the value 𝑎𝑖𝑖 = − ∑ 𝑎𝑖𝑗𝑟𝑗=0𝑗≠𝑖
where r is the last state of
the model. Transition matrix for Model-1 then will be
𝐴 = [−2𝜆 2𝜆 0
0 −𝜆 𝜆0 0 0
]
Since there is a different in working status from winter and summer, the
availability of the system in both period is calculated differently. Availability
of the system for time 𝑡 in period summer is accumulation of probability that
the trains, for time 0 until time 𝑡, are in state 1 and state 2 or we can write as
follow
𝐴𝑣(𝑡)𝑠𝑢𝑚𝑚𝑒𝑟 = 𝜇𝑡(1,1) + 𝜇𝑡(1,2) (7)
𝐴𝑣(𝑡)𝑤𝑖𝑛𝑡𝑒𝑟 = 𝜇𝑡(1,1)
𝜇𝑡 is probability of Markov process in each state. Thus, for initial probability
of the system is 𝜇(0) = [1 0 0] which means all of the trains are in the
first state. In equation (8), 𝜇𝑡(1,1) referring probability in row 1 column 1.
18
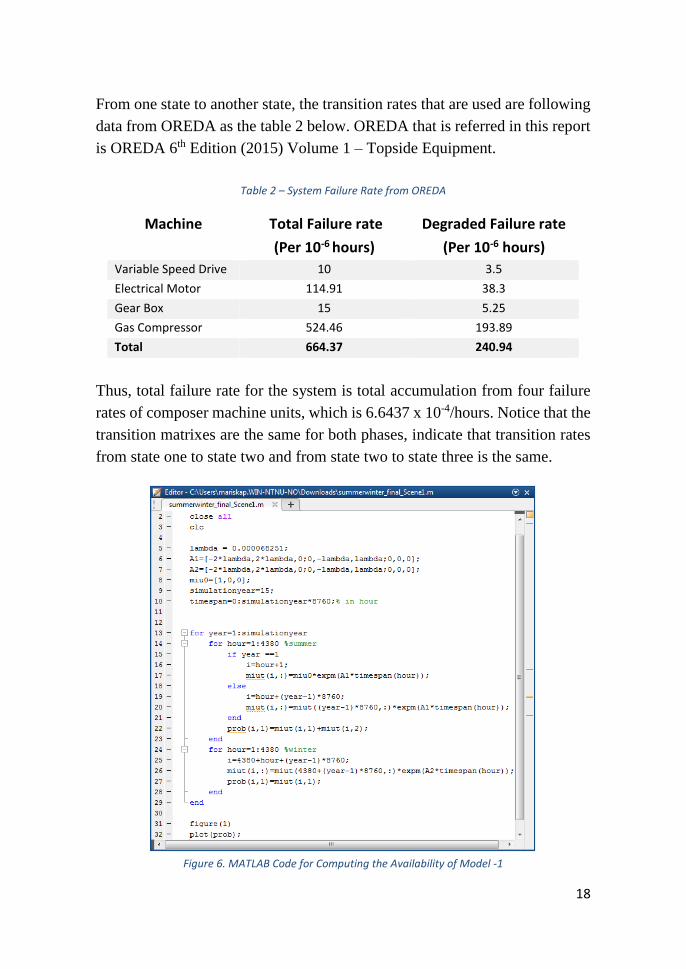
From one state to another state, the transition rates that are used are following
data from OREDA as the table 2 below. OREDA that is referred in this report
is OREDA 6th Edition (2015) Volume 1 – Topside Equipment.
Table 2 – System Failure Rate from OREDA
Machine Total Failure rate
(Per 10-6 hours)
Degraded Failure rate
(Per 10-6 hours)
Variable Speed Drive 10 3.5
Electrical Motor 114.91 38.3
Gear Box 15 5.25
Gas Compressor 524.46 193.89
Total 664.37 240.94
Thus, total failure rate for the system is total accumulation from four failure
rates of composer machine units, which is 6.6437 x 10-4/hours. Notice that the
transition matrixes are the same for both phases, indicate that transition rates
from state one to state two and from state two to state three is the same.
Figure 6. MATLAB Code for Computing the Availability of Model -1

19
Using MATLAB program, we can calculate the availability of the system
based on Markov process that we have built. In figure 6, we see MATLAB
code to compute system’s availability in each phase. Each phase or each
season is designed to take place for six months’ period or 4380 hours. The
availability diagram from numerical result of Model-1 is showed in Figure 7.
Figure 7. The Availability Graph for Model 1
From Table 2, we know that total failure rate is 𝜆 = 6,6437 ×10−4 /ℎ𝑜𝑢𝑟𝑠 ,
it means that the system has mean time to failure (MTTF) for 1505.18 hours.
As we expect, the system will have total failure before it reaches second year
of operation. To see the trend in longer period, the adjustment to failure rate
is made. By using ten (10) time smaller 𝜆 value from OREDA, we can see the
trend result in figure 8.
We start computing the model with summer phase first, then continue to winter
phase, and go back to summer phase for the next year. From the graph in figure
8, we can see the dropping line for winter season is quite extreme. The gap
between phases due to different condition for working state in each season. In
fifteen years, the availability line for Model 1 is closed to 0.
0
0.2
0.4
0.6
0.8
1
16
09
12
17
18
25
24
33
30
41
36
49
42
57
48
65
54
73
60
81
66
89
72
97
79
05
85
13
91
21
97
29
10
33
71
09
45
11
55
31
21
61
12
76
91
33
77
13
98
51
45
93
15
20
11
58
09
16
41
7
AV
AIL
AB
ILIT
Y A
T TI
ME
T
TIME (T) IN HOUR(S)
Availability Diagram for Model-1 (λ=6,6437 x 10-4)
Availability Line
MTTF = 1505.8 hours

20
Figure 8 The Availability Graph for Model 1 Using Adjusted Failure Rate
3.1.2 Markov Process Model with Maintenance
Model 2
Model-1 above is very basic and does not consider any maintenance.
Adjustment is needed to make the simulation can give a proper result to real
case. Model-2 in figure 9 is a model that is created with involvement of
maintenance when the system is failed. In this model, when the failure
happened during winter at state 2, maintenance will be carried out. Yet, when
the period of maintenance in this state start entering summer phase, the
maintenance will be hold on or stopped because in summer phase we need
fewer trains. In summer phase, we define second state as a working state where
one failure train will keep the system goes on so the maintenance will be no
longer needed.
Repair rate is simulated with two numbers of repair values i.e. maximum
repair time (0.0027/hour) and mean repair time (0.04/hour) from OREDA. The
result can be seen in Figure 10.

21
The graphs in Figure 10 are numerical result of Model-2 with different value
of repair rates, maximum and average repair time. The total mean availability
of each model in order is 75.426%, and 97.761%. The explanation about how
to calculate mean availability value will be discussed in chapter 3 section 3.3.1
availability comparison. Despite of the result from Model-2 with average
repair time is quite high, however in certain time when the system switches
the phase to winter, the availability is close to 0. This is not the risk that a
company will take because it can lead to failure for every winter phase. When
we adjust the value of failure rate become ten (10) times smaller than the value
from OREDA, we get result that is pictured on Figure 11.
In figure 10, we can see that the pattern of the graph gets steady in short period
of time. We start the graph in summer phase at 1 of y axis. It goes down really
slow for the first phase and suddenly drop with big gap when the system
switches to winter phase at 𝑡 = 4381. This happens since we calculate the
availability from first state only during winter phase instead of first state and
second state like we do in summer phase. The availability line in winter
increases rapidly until it gets stable number. The increase happens since value
of repair rate is bigger compare to failure rate. When the phase enters summer
period in the following year, the availability line jumps higher since we come
back to initial calculation, counting the availability from probability in the first
and second state. The pattern goes on until in the end of time horizon used in
this computation
Figure 9. Model 2 – Markov Process With Maintenance

22
Figure 10. Numerical Result for Model 2 with Different values of Repair Rate
.
Winter phase
Summer phase
Summer phase
Winter phase

23
Figure 11 Availability Diagram for Model 2 with Maximum Repair Rate and Adjustment of Failure Rate
Total availability of the system in Model-2 with adjustment failure rate and
maximum repair time is 95.751% and 99.696% for Model-2 with adjustment
failure rate and average repair time. We can see that in every model, we can
get steady state in short time, starting at year 2 or year 3. This fast formation
of steady state occurs due to few number of phases which are only summer
and winter and numerical result from the same phase is similar for every year.
Model 3
In Model 3, we introduce maintenance program as soon as any failure happens
to the running trains. In this case, we assume one maintenance crew is
dedicated to each failed train and repair rates are the same for both phases.
Model 3 is depicted on Figure 12.

24
Figure 12 Markov Process Model 3, Availability Diagram for Model 3 in Average (Middle) and
Maximum (Bottom) Repair time.

25
The availability for the system from Model-3 is quite high i.e. 80.265% with
maximum repair rate value and 98.365% with mean repair rate. The
availability diagram for each model is showed in Figure 13. The availability
during summer and winter is plotted with straight line because the repair rate
is higher than failure rate so the trains can maintain their constant condition
almost as initial state. The dropping line in availability line during winter
phase due to the number of state that is considered as working state which is
only the first state.
Model 4
we change maintenance strategy into full maintenance which means that we
repair the trains and turn them to new condition or we assume they turn as
good as new after maintenance. The maintenance will be done when the whole
system is failed. During summer, the system fails in the third state. Meanwhile
in the winter, we define system failure in the second state and third state. Since
in third state of winter phase all of the trains are failed, we need faster repair
rate, thus we arrange value of 𝜇1 is higher compare to 𝜇2. The availability
with this maintenance program is 84.234%.
Figure 13. Markov Process - Model 4

26
Figure 14. Model 4 and Availability Diagram for Model 4
Model 5
In this model, we conduct maintenance service as soon as any failure happens
and return the trains to their last position when the system is in working state.
With this program, we get better result compare to Model 4 result. The
availability with this model is 97.696%

27
Figure 15. Model 5 and the Availability Diagram
Model 6
In this model, we try to apply maintenance action as soon as any failure is
happened. Slightly different compare to Model 5, instead of we repair the
failed trains to the last position, in this model we return the trains as good a
new like in the first state. This program gives the better result compare to the
other model that has been described above. Using maximum repair time value,
we can get availability of the system for 82,391% and when the mean repair
time is used, the availability is 98,391%. The model and the numerical result
diagram can be seen in figure 16.

28
Figure 16. Model 6, Availability Diagram with Maximum Repair Time and Mean Repair Time
Model 7
The first six models above have the same scheme for winter phase. It has only
one working state i.e. the first state. During winter phase the system is able to
fulfil the order when all of the trains are in good condition and running in their
full capacity. But more often in real case, one failure of the train will not make
the rest of the trains stop operating. They will keep running. Speedy
maintenance action however will be required in this situation to put the system

29
back on track as soon as possible. While the failed train is under maintenance,
the company will endure some loss since they cannot meet the target.
Figure 17. Model 7 - Markov Process Model
Model-7 is calculated to see how the difference in availability for the whole
system when we make the second state of winter phase turn into working state.
In Figure 17, the repair rate for 𝜇1is smaller compare to 𝜇2. During winter
phase, all the trains are required to be in place to fulfil the order. Thus,
maintenance is more urgent and has to be done faster. In this case, the value
of 𝜇2 and 𝜇3 are using mean repair time from OREDA and 𝜇1is using
maximum repair time value
Figure 18 displays two different availability diagrams for winter phase only.
One diagram is showing the availability of the system when it is running with
full capacity with average availability 96.63%, and the other one is showing
the availability of the system when it is in the second state with system
capacity is reduced. The average availability is 3.3% for reduced capacity. In
total, the average availability of the system, including summer phase is
increase to 99.75%.
When both of phases have the same working state, the gap between summer
season and winter season is narrower and availability of the system is
increased. But we need to consider that there is also cost for production. From
this numerical result, we can estimate the approximation of production lost

30
probability that company will face during winter operation. To get this
estimation number, we calculate total availability of the system during winter
phase when the system in state two and divided the number to total availability
of the system. From this division, we get 1.6% from total availability as
estimation number for production lost. Knowing this estimated production
lost, the company can make planning earlier to cover the lost, for instance is
by having buffer for the gas that need to be delivered to the customer.
Figure 18. Availability Diagram for Model 7 (Winter Phase). Availability Diagram for state 1 (top) and state 2 (bottom)

31
3.1.3 Simulation with Standby Condition
Model 8
As was mentioned before, the treatment for the gas compressor trains during
summer may vary. Another maintenance program that is adopted in this case
is standby trains model. Standby model allows us to cut maintenance time by
having trains exchange. The train that is failed will be replaced by good train
as soon as the failure happens. With this planning, the repair time during
summer can be smaller compare to winter time. In the model, we set 𝜇1 > 𝜇2 .
The mean availability for Model-8 is 85.348%.
Figure 19. Model 8 - Markov Process Model and Availability Diagram

32
3.2 Markov Process Model with Degradation Process
Model 9
First section of this chapter presents system models without any degradation
process. There is no observation or monitoring applied to the system before
the system actually fails or breaks down. Monitoring activity towards
degradation process in each machine can give advance warning to engineers
that there will be digression in system performance. The engineers will be able
to take preventive actions to avoid the unwanted event, system failure.
Figure 20. Model 9 – Markov Process Model with Degradation State
The models that are discussed in this section will give illustration on how the
actions that are taken place to respond any degradation process will influence
the availability number. Figure 20 shows the expansion of Markov process by
having degradation states before the trains move to failure state. Performance
of the machines will decrease rapidly after the machines experiencing
degradation. Thus, the failure rate for 𝜆2 is higher compare to 𝜆1. By having

33
the knowledge of trains’ current state, we can have better planning for the
maintenance such as advance planning for spare part supply, integrated
maintenance schedule, proper number of required maintenance crew, and
better coordination with another operation schedule.
In model 9, maintenance or repair activity is implemented as soon as the
failure happens. Both phases have the same program maintenance. Yet, there
is different rate for 𝜇1 and 𝜇2 since maintenance action during winter is more
urgent and needs to be done faster.
Figure 21. Avaialbility Diagram for Model 9
As expected, the mean availability for model 9 is quite high i.e. 98.30%. We
calculate the availability from 5 states out of 6 states for summer phase where
total failure will happen when both of the machines are failed in the same time.
During winter, only 3 states out 6 states for winter phases that are considered
as working states where all of the trains need to be in function.

34
System failure will less likely to happen in this model since monitoring actions
of the machines are more frequent and the operators will have more attention
to the machines once degradation symptoms start emerging.
Model 10
In the last model of this report, we will introduce preventive maintenance.
Preventive maintenance will be done when the maintenance crews have
identified that there is degradation happening in the trains. In Figure 22 we
can recognize preventive maintenance for green arrow from state from state
CdC or CdCd to initial state, CC. Since preventive maintenance is an early
detection process to avoid further failure, maintenance action not necessarily
to be done so fast. Thus, in this model, we set repair rate of preventive
maintenance with same value of maximum maintenance time from OREDA
(𝜇 = 0,0027/ℎ𝑜𝑢𝑟). Numerical result for this calculation, it gives average
availability for 99.568%. It approves that by having preventive maintenance,
we can keep our system always in working condition most of the time.

35
Figure 22. Model 10 - Markov Process Model with Preventive Maintenance

36
3.3 Model Recommendation from Availability
Comparison
We have ten models that have been presented in this chapter to give the
company information regarding availability for maintenance programs that
can be implemented in the plant. Those models are considered possible to be
applied in real technical condition on the existing gas compressor system even
though the parameters value that are used need to be adjusted with the real
number from the plant. Currently, there are no actual data that can be referred
to, thus some of the parameters in this report are based on assumption and
some of data are also referred to OREDA data base. To avoid unreasonable
gap in comparing the availability between models, we will compare one model
to another model that uses the same parameters assumption.
Table 3
Maintenance Program
Mean Availability
per unit time
No Repair Time Model 1-1 1.60 %
Model 1-2 11.49 %
Maximum Repair Time (μ=0,0027/hour)
Model 2-1 75.43 %
Model 3-1 80.27 %
Model 6-1 82.96 %
Mean Repair Time (μ=0,04/hour)
Model 2-2 95.75 %
Model 3-2 98.37 %
Model 6-2 98.39 %
Combination of Repair Time Model 4 84.23 %
Model 5 83.73 %
Reduced-Capacity Model 7 99.75%
Standby Model 8 85.35%.
Degradation Model 9 98.30%
Model 10 99.57%

37
These average availability numbers are produced by following this formula:
𝐴𝑣𝑒𝑟𝑎𝑔𝑒 𝐴𝑣𝑎𝑖𝑙𝑎𝑏𝑖𝑙𝑖𝑡𝑦 =∑ 𝜇𝑡
𝑡=131400𝑡=0
131400 ℎ𝑜𝑢𝑟𝑠 (8)
From MATLAB calculation, we will get 3 columns information of 𝜇𝑡. Each
column contains information for each state. Only 𝜇𝑡 in working state will be
considered. During summer, information from state one and two will be added
up together. Meanwhile for winter, 𝜇𝑡 for first state only that will be put into
account. Total availability during winter will be summed with total availability
of summer. Total number from this addition then will be divided by total time.
Model 2 and 3 share the same parameters assumption for failure rates and
repair rates, both in summer and winter phase. Repairs in both models are done
when failures happen and turn the trains back to previous condition. Model 6
is also almost similar with model 2 and 3 except we assume that reparation of
the trains will turn the trains’ condition as good as new. The models are
calculated for two repair time, maximum repair time and average repair time
that we get form OREDA.
All of the models except model 7 have the same assumption for working state
in winter phase. Gas compressor trains in winter season must not fail to fulfil
the order. Thus, if one train fails then the system is considered fail as well.
This assumption makes the availability in winter season only calculated from
state one. Model-7 gives the highest average availability value, yet we have to
consider the lost production that occurs.
For standby model, Model8, is similar with the condition that we have in
Model-5. The difference is in summer. Instead of let all the machines are
functioning, model in standby mode allows half of the trains to be in standby
position so if any train fails during the operation, the operators can switch the
train with standby train and repair the failed train in parallel. This model gives
slightly higher availability in total. It also helps operators to more focus in
repairing since they will have more time until the next failure.

38
Preventive model that is explained in Model 10 is showing the best availability
number. It has been expected for having machine degradation monitoring. it
will give better information for the operators to avoid the system failure. With
this information, we can have better plan in maintenance and other strategies
related to maintenance to make the operation optimum.

39
3.4 Model Validation
To be sure that models in this chapter are correct, we need to validate the
models. One of the way to validate the models is by comparing the numerical
results with results from another tool or software. Here, we will use another
software called GRIF to check the numerical results from models that are
processed by MATLAB. GRIF is one of many software that can be used to
calculate Markov process. By inputting the Markov process graphs, we able
to calculate the availability of the system. For an example, we will use model
8 to see whether the numerical results that we get from MATLAB and GRIF
are the same or not. In previous section, it has been mentioned that average
availability for Model 8 is 85.348%
Figure 23. Diagram Comparison between GRIF (top) and MATLAB (bottom)

40
Figure 23 is showing graphs comparison that is produced by GRIF and
MATLAB software. We can see that both programs give similar result. In
GRIF’s diagram, we can see the information related to average value of the
availability which is 0.8534 or 85.34%.
We also compare the numerical result between GRIF and MATLAB per time
(t) in figure 24. Error between two software in average is 0.073%. This number
is small enough and acceptable to say that the result from both software is the
same. In other word, the models that we create with MATLAB are valid.
Comparison for other models will be presented in Attachment Chapter except
for Model 9 and Model 10 due to graphics limitation in GRIF. Graphics
limitation in GRIF means how much number of states and transition rates that
we can calculate. GRIF has limitation for 25 graphics and Model 9 and Model
10 have more than the limitation allowed.
The spikes that are showed in figure 24 happen in the time when the phases
are switching from summer to winter or winter to summer (𝑇𝑖). To calculate
the error, we use this following formula
% 𝐸𝑟𝑟𝑜𝑟 = |µ𝑡 𝐺𝑅𝐼𝐹−µ𝑡 𝑀𝐴𝑇𝐿𝐴𝐵
µ𝑡 𝐺𝑅𝐼𝐹| ×100 (8)
Figure 24 - Error Diagram Between GRIF and MATLAB

41
In summary, the comparisons between numerical results that are produced by
GRIF and MATLAB are showed in table 4.
Table 4. Comparison of Availability Between GRIF and MATLAB
Model % Error
Mean Availability per Time (t) in % Description
GRIF MATLAB
1 72.71823 1.6 1.6
2 4.480605 78.24 75.43 µ=0,0027/hour
2 0.036443 97.79 95.75 µ=0,04/hour
3 0.000787 80.27 80.27 µ=0,0027/hour
3 2.03E-07 98.37 98.37 µ=0,04/hour
4 9.03E-06 84.23 84.23
5 1.627436 85.29 83.73
6 2.61E-05 82.96 82.96 µ=0,0027/hour
6 2E-07 98.39 98.39 µ=0,04/hour
7 0.014278 98.1 99.75
8 0.073007 85.34 85.35
To calculate the availability using GRIF is much simpler compare to
MATLAB. GRIF has input interface that allows the user to create Markov
process graph directly in the program.
Figure 25.GRIF’s User Interface
Computation Button

42
The brown circles identify the states that are available and white circles
identify the failure states. The user can connect one state and another using the
arrows for transition direction. It is possible to rename the state and change
the efficiency of the state. For normal state, without degradation, usually the
efficiency is 1.
To adjust the parameter, GRIF also has several columns that we can fill to set
the duration of the simulation, single Markov Process or multiple process, etc.
Using computation button, the program will start computing the availability
of the process that has been input. The result can be a graph or set of number
that shows the availability of the system in each 𝑡 according to time setting.

43
Chapter 4
Conclusion
In this chapter, we will look back the objectives of this thesis and will discuss
whether we have answered all the points which are mentioned in that section.
In Objectives, we have five main points which are list of possible programs,
availability estimation, availability comparison, remaining useful lifetime
estimation, and maintenance program that will be recommended for the
company.
4.1 Maintenance Models
We have discussed ten (10) models of Markov process with different number
of parameters and different scenarios. MATLAB is used to help as calculator
in producing numerical results for computing the probability of the system in
each state at time 𝑡. The time period that is calculated is for fifteen (15) years.
Adjustment in each model is applied to make the model applicable for real
condition. Since we do not proper information related to failure rates and
maintenance time for real case, we use data from OREDA. There are several
models that are calculated twice with different parameters to see how big the
influence of a parameter to change system’s availability.

44
4.2 System Availability
We define the model using Markov process by divided the physical conditions
(working or fail) of the system into several possible states. Between each state,
we set different parameters and assumptions such as value of transition rate,
when maintenance action will be done, and the result of maintenance action
toward the failure trains (as good as new or not). Different phases are applied
to distinguish different conditions of states due to difference in demand
requirement.
Using MATLAB as calculator, we can get numerical result on possibility of
the system is exist in certain state, in this case we interest to know the
possibility of the system exist in working state regardless in which phase.
Different models share different trends on the graph. The highest availability
is showed by model 10 where there is involvement of preventive maintenance
and condition monitoring towards machine’s performance.
Condition monitoring let us to have better knowledge of the system that we
have. It gives us earlier warning when the system start degrading so the crew
can take action as soon as possible before further unwanted event occurs. With
early information about what happen to gas compressors, the operators can
decide what actions that need to be done in proper and timely manner.
The results that are produced from MATLAB are validated using GRIF.
Another software that has capability in computing availability from Markov
process. In chapter 3.4, we can see the that our calculation using MATLAB
gives the same result if we use this software.
4.3 Remaining Useful Lifetime
Remaining useful lifetime is the remaining time that a system has until the end
of useful life knowing the condition at current time. To estimate remaining
useful lifetime with Markov process, we have to know the current state of the
system.

45
Initial probability for every state at time t=0 is µ0 = [1,0,0]. When we compute
Markov process model, we assume that the system starts with new machines
so we can be sure that the system is 100% work. In real condition, the system
may have run for several years, so we have to adjust the value of µ0 and
compute the model again. With the same procedure in the chapter 3.1.2, we
can see the probability of the machine is being in working state for period of
time that become our main interest.
Let’s take Model-2 for example. When the system has run for 20 years, and
we assume that in current condition, the probability of each state for the system
is µ0 = [0.3,0.65,0.05]. Our interest is to know the availability of the system
in the next 5 years. Using MATLAB, we can get estimation for 0.1539 or
15.4% that the system will be available for the next five years.
Figure 26. Availability Estimation for a System

46
4.4 Further Discussion
While writing this thesis, there are some points that become interest for the
writer yet not have been covered or discussed. This interest can be input for
the reader to explore more related to those topics. First, numerical results from
all of the models show that they reach steady state in early time. It may be
due to repair rate that is quite high, few number of phases which are only two,
and also because the assumptions that are used for repaired condition. In this
report, it is assumed that after repair or maintenance, the trains come back to
new condition which may not be the case in real condition.
Second, condition monitoring is a good tool in supporting Model-10 as the
recommended model that the writer proposed for this report. There are a lot of
technics of condition monitoring that will be fit to be carried out for gas
compressor system. This topic can be an option for another study in the future.
There are no data yet from the actual plant that can be useful for this report.
Necessary adjustment need to be done when the required information will be
available.

47
Attachment
In this section, we will present the comparison of Error computation from
GRIF and MATLAB that have been explained in chapter 3.4.
Model 1
In the beginning of the graph, the errors are close to 0. After 2 years, the errors
increase. This is because numerical results from MATLAB for µ𝑡 keep
decreasing into so small number (µ131400 = 1.555 𝐸 − 76). Meanwhile with
computation using GRIF, the values of µ𝑡 decrease only at 𝑇𝑖 or when the
season switches yet within each season the values remain constant. For
example, the values from µ127021 until µ131400 are the same i.e. 6.5836 E-14.
This different that make the error after two years decrease. The average of %
error for Model 1 is 72,72%. Availability diagram for Model 1 by GRIF is
presented in the next page.
0
20
40
60
80
100
14
86
89
73
51
46
02
19
46
92
43
36
29
20
33
40
70
38
93
74
38
04
48
67
15
35
38
58
40
56
32
72
68
13
97
30
06
77
87
38
27
40
87
60
79
24
74
97
34
11
02
20
81
07
07
51
11
94
21
16
80
91
21
67
61
26
54
3
Erro
r P
er T
me
(t)
in %
Time in Hour(s)
% Error Between GRIF and MATLAB(Model 1)

48
Model 2
The average of error for Model 2 is 0,036% for Model 2 that use repair rate
equal to 0,04/hour. And for Model 2 that uses maximum repair rate, the
average of error is 4,48%. There is quite different results between GRIF and
MATLAB even though the trend from availability diagram for both method
are similar.
0
5
10
15
20
25
1
48
68
97
35
14
60
21
94
69
24
33
6
29
20
33
40
70
38
93
74
38
04
48
67
1
53
53
85
84
05
63
27
26
81
39
73
00
6
77
87
38
27
40
87
60
79
24
74
97
34
1
10
22
08
10
70
75
11
19
42
11
68
09
12
16
76
12
65
43
Erro
r P
er T
ime
(t)
in %
Time in Hour(s)
% Error Between GRIF and MATLAB(Model 2 µ=0,0027/hour)

49
The spikes in both two diagrams above happen during phase changing.
0
0.5
1
1.5
2
1
54
76
10
95
1
16
42
6
21
90
1
27
37
6
32
85
1
38
32
6
43
80
1
49
27
6
54
75
1
60
22
6
65
70
1
71
17
6
76
65
1
82
12
6
87
60
1
93
07
6
98
55
1
10
40
26
10
95
01
11
49
76
12
04
51
12
59
26
Erro
r P
er T
ime
(t)
in %
Time in Hour(s)
% Error Between GRIF and MATLAB (Model 2 µ=0.04/hour)

50
Model 3
The trend for Model 3 between maximum repair time and average repair time
shows the same pattern. The average error for Model 3 in consecutive order is
0.000787036 % and 2.03181E-07%. Different results between GRIF and
MATLAB occur in the beginning of computation. While the model gives
steady state result, the errors are close to 0.
0
0.001
0.002
0.003
0.004
0.005
0.006
0.007
15
05
5
10
10
91
51
63
20
21
72
52
71
30
32
53
53
79
40
43
34
54
87
50
54
15
55
95
60
64
96
57
03
70
75
77
58
11
80
86
58
59
19
90
97
39
60
27
10
10
81
10
61
35
11
11
89
11
62
43
12
12
97
12
63
51
Erro
r P
er T
ime
(t)
in %
Time in Hour(s)
% Error Between GRIF and MATLABModel 3 (µ=0,0027/hour)
0
0.0001
0.0002
0.0003
0.0004
0.0005
0.0006
15
05
51
01
09
15
16
32
02
17
25
27
13
03
25
35
37
94
04
33
45
48
75
05
41
55
59
56
06
49
65
70
37
07
57
75
81
18
08
65
85
91
99
09
73
96
02
71
01
08
11
06
13
51
11
18
91
16
24
31
21
29
71
26
35
1
Erro
r iP
er T
ime
(t)
in %
Time in Hour (s)
% Error Between GRIF and MATLABModel 3 (µ=0,04/hour)

51
Model 3 with µ = 0,0027/hour
Model 3 with µ = 0,04/hour

52
Model 4
The average of error is 9.02595E-06%.
0
0.0005
0.001
0.0015
0.002
15
25
71
05
13
15
76
92
10
25
26
28
1
31
53
73
67
93
42
04
94
73
05
52
56
1
57
81
76
30
73
68
32
97
35
85
78
84
1
84
09
78
93
53
94
60
99
98
65
10
51
21
11
03
77
11
56
33
12
08
89
12
61
45
Erro
r P
er T
ime
(t)
in %
Time in Hour(s)
% Error Between GRIF and MATLABModel 4

53
Model 5
The average of error is 1.627435649%.
00.5
11.5
22.5
33.5
4
1
50
55
10
10
9
15
16
3
20
21
7
25
27
1
30
32
5
35
37
9
40
43
3
45
48
7
50
54
1
55
59
5
60
64
9
65
70
3
70
75
7
75
81
1
80
86
5
85
91
9
90
97
3
96
02
7
10
10
81
10
61
35
11
11
89
11
62
43
12
12
97
12
63
51
Erro
r P
er T
ime
(t)
in %
Time in Hour(s)
% Error Between GRIF and MATLAB(Model 5)

54
Model 6
The average of error is 1.99989E-07% for µ = 0,0027/hour and 2.60589E-
05% for µ = 0,04/hour
0
0.001
0.002
0.003
0.004
0.005
0.006
0.007
15
05
5
10
10
91
51
63
20
21
72
52
71
30
32
53
53
79
40
43
34
54
87
50
54
15
55
95
60
64
96
57
03
70
75
77
58
11
80
86
58
59
19
90
97
39
60
27
10
10
81
10
61
35
11
11
89
11
62
43
12
12
97
12
63
51
Erro
r P
er T
ime
(t)
in %
Time in Hour(s)
% Error Between GRIF and MATLABModel 6 (µ=0,0027/hour)
0
0.0001
0.0002
0.0003
0.0004
0.0005
0.0006
15
05
51
01
09
15
16
32
02
17
25
27
13
03
25
35
37
94
04
33
45
48
75
05
41
55
59
56
06
49
65
70
37
07
57
75
81
18
08
65
85
91
99
09
73
96
02
71
01
08
11
06
13
51
11
18
91
16
24
31
21
29
71
26
35
1
Erro
r P
er T
ime
(t)
in %
Time in Hour(s)
% Error Between GRIF and MATLABModel 6 (µ=0,04/hour)

55
Model 6 with µ = 0,0027/hour
Model 6 with µ = 0,04/hour

56
Model 7
The average of error is 0.014277547%.
0
5
10
15
20
25
30
1
48
68
97
35
14
60
21
94
69
24
33
6
29
20
33
40
70
38
93
74
38
04
48
67
1
53
53
85
84
05
63
27
26
81
39
73
00
6
77
87
38
27
40
87
60
79
24
74
97
34
1
10
22
08
10
70
75
11
19
42
11
68
09
12
16
76
12
65
43
Erro
r P
er T
ime
(t)
in %
Time in Hour(s)
% Error Between GRIF and MATLABModel 7

57
Bibliography 1. StatOil, StatOil. 2013. 2. Randall, R.B., A New Method of Modeling Gear Faults. Journal of Mechanical
Design, 1982. 104(2): p. 259-267. 3. Jelaska, D., Introduction, in Gears and Gear Drives. 2012, John Wiley & Sons,
Ltd. p. 1-16. 4. Kermanpur, A., et al., Failure analysis of Ti6Al4V gas turbine compressor
blades. Engineering Failure Analysis, 2008. 15(8): p. 1052-1064. 5. Jianhui, L., et al. Model-based prognostic techniques [maintenance
applications]. in Proceedings AUTOTESTCON 2003. IEEE Systems Readiness Technology Conference. 2003.
6. Kassner, M.E. and M.T. Pérez-Prado, Five-power-law creep in single phase metals and alloys. Progress in Materials Science, 2000. 45(1): p. 1-102.
7. Barros, A.C.P., Some notes about the Remaining Useful Lifetime. 2016: NTNU. p. 2.
8. Rausand, M. and H. Arnljot, System reliability theory: models, statistical methods, and applications. Vol. 396. 2004: John Wiley & Sons.