remote operated guiding device group 8 february 17, 2005 steven isaacs cesar rondon matthew grande...
Post on 20-Dec-2015
214 views
TRANSCRIPT
Remote Operated Guiding Remote Operated Guiding DeviceDevice
Group 8Group 8
February 17, 2005
Steven IsaacsCesar RondonMatthew GrandeChristopher McCalmont
Faculty Advisor: Prof. Zhenqi Zhu

Mission StatementMission Statement Design remote-operated catheter guiding Design remote-operated catheter guiding
device.device.• Aid in prevention, treatment of vascular Aid in prevention, treatment of vascular
conditions.conditions. Improve upon current technologies.Improve upon current technologies. Its all about the patients.Its all about the patients.
• Better chance of survivalBetter chance of survival• Decrease Recovery timeDecrease Recovery time• Availability of minimally invasive surgeryAvailability of minimally invasive surgery
Follow the most stringent FDA Follow the most stringent FDA regulations.regulations.

Medical BackgroundMedical Background
Leading causes of death in the United Leading causes of death in the United States per yearStates per year
1.1. Heart AttackHeart Attack
2.2. CancerCancer
3.3. Vascular ConditionsVascular Conditions Lack of advanced minimally invasive Lack of advanced minimally invasive
surgery.surgery.• Patients often required to have open surgery.Patients often required to have open surgery.• Few conditions can actually be treated by Few conditions can actually be treated by
minimally invasive surgery.minimally invasive surgery.

Medical Background Medical Background
When minimally invasive is chosen:When minimally invasive is chosen:• Stent inserted through preformed catheterStent inserted through preformed catheter• Filling of aneurysm with micro-coils (also Filling of aneurysm with micro-coils (also
through preformed catheter)through preformed catheter) PREFORMED IS THE PROBLEM!PREFORMED IS THE PROBLEM!
• Do not allow for treatments to be performed in Do not allow for treatments to be performed in other areas of the bodyother areas of the body
Develop a manipulatable catheterDevelop a manipulatable catheter• Solves the problem of non-torso minimally Solves the problem of non-torso minimally
invasive surgery.invasive surgery.• Reduced size of catheter opens more optionsReduced size of catheter opens more options

Recap (Objective)Recap (Objective)
Design and produce scaled up Design and produce scaled up prototype for preliminary testing.prototype for preliminary testing.
Promote use of minimally invasive Promote use of minimally invasive surgery.surgery.• Improve upon current technologiesImprove upon current technologies• More convenient, cost effectiveMore convenient, cost effective• Increase chance of survivalIncrease chance of survival• Reduce Recovery timeReduce Recovery time

Recap (Objective)Recap (Objective)
Create differentiatorsCreate differentiators• Controlling mechanismControlling mechanism• No preformed pieces, No preformed pieces,
manipulatable tipmanipulatable tip• Reach more remote Reach more remote
areas of bodyareas of body Vessels with diameters Vessels with diameters
of 0.02” or lessof 0.02” or less
• Compatibility with other Compatibility with other medical products.medical products.

Recap (Concept Selection)Recap (Concept Selection) Main principle behind functioning Main principle behind functioning
of device is guide wiresof device is guide wires• Connecting to tipConnecting to tip• Shortening of legs bends the tip Shortening of legs bends the tip
in certain anglesin certain angles Original DesignOriginal Design
• 2 different bases, 3 different tips.2 different bases, 3 different tips.• Abandoned due to bowingAbandoned due to bowing• Added ring to control bowingAdded ring to control bowing
New Design New Design • Use two platforms instead of ring.Use two platforms instead of ring.• Table was constructed to aid in Table was constructed to aid in
selection of platform design.selection of platform design.

Recap (Concept Selection)Recap (Concept Selection)
Design Criteria Importance (1-5)Design Concepts (1-5)
A B C D E
Simplicity of controlling tip angle 3 5 4 3 2 1
Tip stability 5 1 2 3 4 5
Cost to purchase 2 5 4 3 2 1
Cost to manufacture 3 5 4 3 2 1
Degrees of freedom 5 1 2 3 4 5
Desired degrees of freedom 5 1 5 4 3 2
Catheter maneuverability (flexibility) 5 5 4 3 2 1
Catheter maneuverability (rigidity) 3 1 2 3 4 5
Simplicity of assembly 4 5 4 3 2 1
Durability 2 1 2 3 4 5
Un-weighted total = 30 33 31 29 27
Weighted total = 105 123 116 109 102

Recap (Concept Selection)Recap (Concept Selection)
Control MechanismControl Mechanism• Allow full control in any Allow full control in any
axisaxis Final DesignFinal Design
• Small, lightweight, Small, lightweight, adaptable, mountableadaptable, mountable
• Offers precisionOffers precision• Visible internalsVisible internals• Six leversSix levers• Problem with side effect Problem with side effect
forces added to system forces added to system during actuation.during actuation.
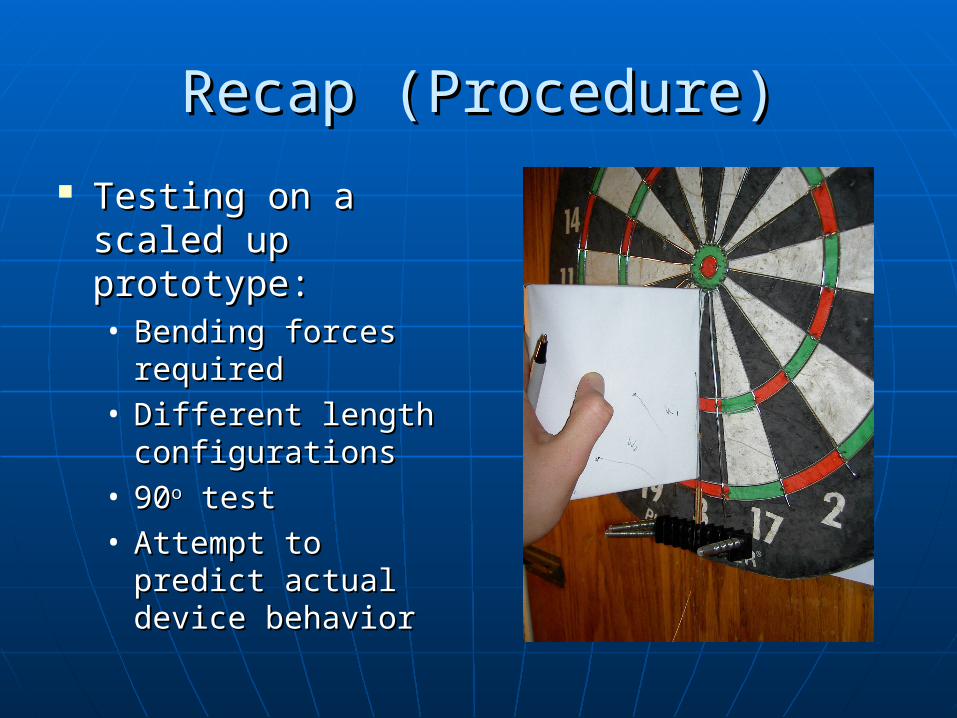
Recap (Procedure)Recap (Procedure)
Testing on a scaled Testing on a scaled up prototype:up prototype:• Bending forces Bending forces
requiredrequired• Different length Different length
configurationsconfigurations• 9090oo test test• Attempt to predict Attempt to predict
actual device actual device behaviorbehavior
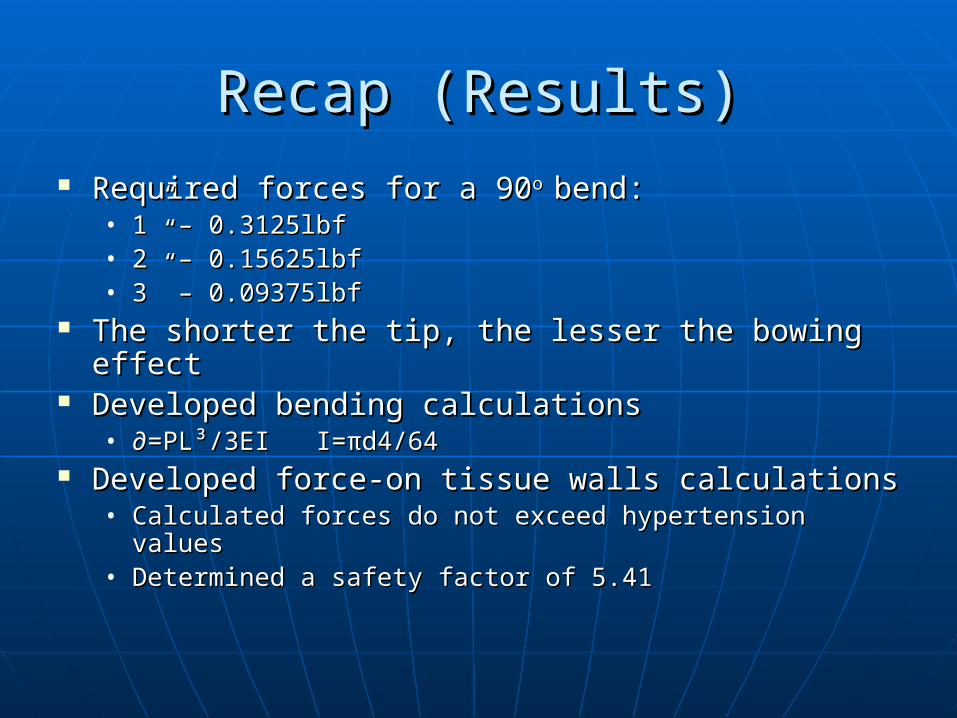
Recap (Results)Recap (Results) Required forces for a 90Required forces for a 90o o bend:bend:
• 1” – 0.3125lbf1” – 0.3125lbf• 2” – 0.15625lbf2” – 0.15625lbf• 3” – 0.09375lbf3” – 0.09375lbf
The shorter the tip, the lesser the bowing effectThe shorter the tip, the lesser the bowing effect Developed bending calculationsDeveloped bending calculations
• ∂∂=PL³/3EI=PL³/3EI I=πd4/64I=πd4/64 Developed force-on tissue walls calculationsDeveloped force-on tissue walls calculations
• Calculated forces do not exceed hypertension valuesCalculated forces do not exceed hypertension values• Determined a safety factor of 5.41Determined a safety factor of 5.41

Recap (Conclusions)Recap (Conclusions)
Testing of scale model helped to Testing of scale model helped to understand how actual device would work.understand how actual device would work.
Further material analysis required to Further material analysis required to determine durability and material-specific determine durability and material-specific forces requiredforces required
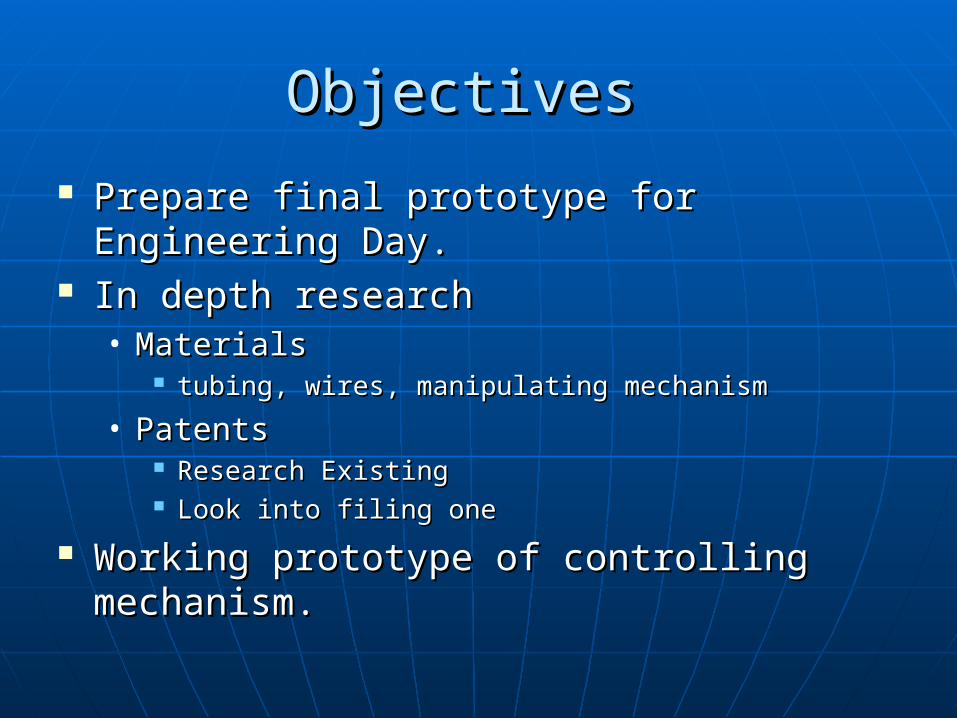
Objectives Objectives
Prepare final prototype for Engineering Prepare final prototype for Engineering Day.Day.
In depth researchIn depth research• MaterialsMaterials
tubing, wires, manipulating mechanismtubing, wires, manipulating mechanism
• PatentsPatents Research ExistingResearch Existing Look into filing one Look into filing one
Working prototype of controlling Working prototype of controlling mechanism.mechanism.
Spring DeliverablesSpring Deliverables
Final scaled up modelFinal scaled up model Final material selection Final material selection Artificial circulatory systemArtificial circulatory system Engineering analysisEngineering analysis Physical analysisPhysical analysis Final cost analysisFinal cost analysis

Patent ResearchPatent Research
Last semester spent researching Last semester spent researching Patent #4,884,579, Patent Patent #4,884,579, Patent #6,824,553, Patent #6,802,849, and #6,824,553, Patent #6,802,849, and Patent #6,810,281Patent #6,810,281• selection of materialsselection of materials• Manipulation of deviceManipulation of device• Future considerationsFuture considerations
End of semester discovered Patent End of semester discovered Patent #6,793,667#6,793,667

Patent ResearchPatent Research Manipulability delivery catheter for occlusive Manipulability delivery catheter for occlusive
devices.devices. Filed in June of 2002 (approved September 2004)Filed in June of 2002 (approved September 2004)
• Hebert and LevineHebert and Levine Manipulability delivery catheter for occlusive Manipulability delivery catheter for occlusive
devices. devices. Similar design to ours.Similar design to ours. Feel that ours is different enough to still warrant a Feel that ours is different enough to still warrant a
patent. patent. • Mostly based on manipulation techniquesMostly based on manipulation techniques• Current technology is not specifically for the brainCurrent technology is not specifically for the brain

Patent ResearchPatent Research
Manipulation Manipulation Techniques.Techniques.• PatentedPatented
One Flexion WireOne Flexion Wire• Radio opaque bandRadio opaque band
One Twisting WireOne Twisting Wire Doubled Up Wall Doubled Up Wall
(with inner gap)(with inner gap)
• May experience May experience trouble when device trouble when device gains length.gains length.

Patent ResearchPatent Research
Manipulation Manipulation Techniques.Techniques.• GroupsGroups
Slightly more Slightly more complicatedcomplicated
No need for twisting No need for twisting guide wireguide wire
Manipulation doesn’t Manipulation doesn’t change with change change with change in length.in length.
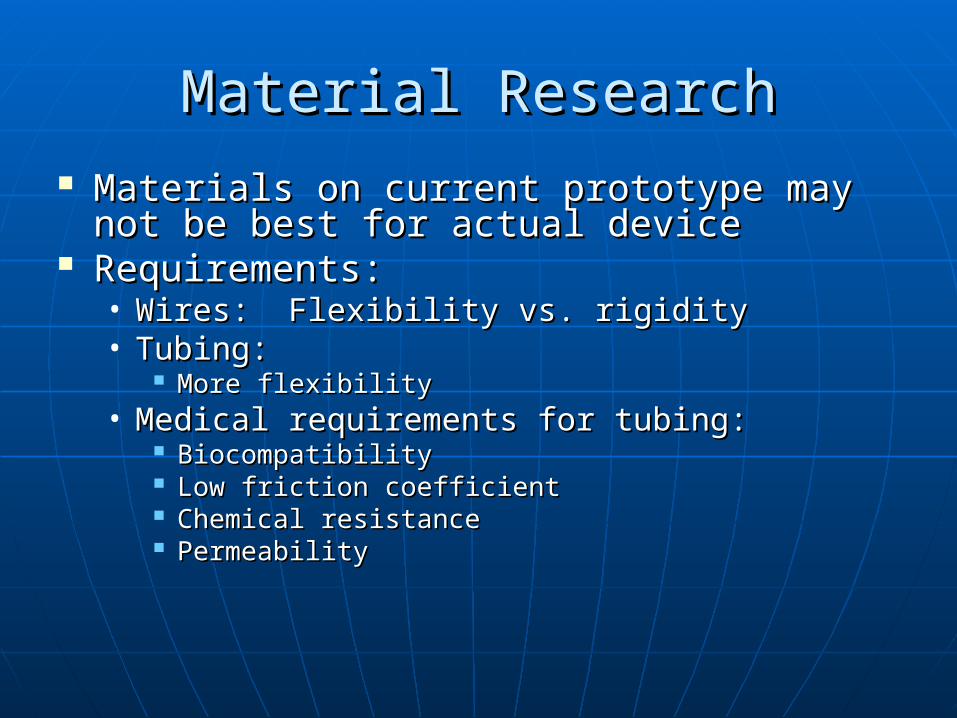
Material ResearchMaterial Research Materials on current prototype may not be Materials on current prototype may not be
best for actual devicebest for actual device Requirements:Requirements:
• Wires: Flexibility vs. rigidityWires: Flexibility vs. rigidity• Tubing:Tubing:
More flexibilityMore flexibility• Medical requirements for tubing:Medical requirements for tubing:
BiocompatibilityBiocompatibility Low friction coefficientLow friction coefficient Chemical resistanceChemical resistance PermeabilityPermeability

Material ResearchMaterial Research Tubing materials currently being used Tubing materials currently being used
include fluoride-based (PEEK, PTFE) tubing include fluoride-based (PEEK, PTFE) tubing and polyurethane tubing.and polyurethane tubing.
Wires currently used include steel alloys, Wires currently used include steel alloys, and platinum alloys.and platinum alloys.
Consider different types of fibers.Consider different types of fibers. Possibility of using Nitinol:Possibility of using Nitinol:
• Electrical vs. Mechanical manipulationElectrical vs. Mechanical manipulation• Localization of forces near the tipLocalization of forces near the tip• Affecting precisionAffecting precision

Material ResearchMaterial Research
Material Yield Strength (psi) Flexural Modulus (ksi) Expansion
Biocompatible Polyurethane 1730 16.8 9.71E-06
Silicone Polyurethane (40) 1070 5.73 5.36E-06
Silicone Polyurethane (20) 928 5.9 6.36E-06
Spring Titanium Alloy 200,000 5,350,000 0.02675
Nickelvac 304 Steel 29,700 29,000 0.000976431
Biodur316LS Steel 137,000 28,000 0.00020438
Carpenter Custom465 Steel 217,000 28,800 0.000132719
Nitinol Shape Memory Alloy 812,000 10,900 1.34E-05
PEEK Medical Tubing 14,065 508 3.61E-05
PTFE Medical Sheath 4,000 220 0.000055
FEP Medical Tubing 5,000 50 0.00001
PFA Medical Tubing 4,500 76 1.68E-05

New CalculationsNew Calculations
Cantilever beamCantilever beam Torque Bends the TipTorque Bends the Tip Applied horizontallyApplied horizontally Force is VectoredForce is Vectored

CalculationsCalculations
TorqueTorque Modulus of FlexibilityModulus of Flexibility Base angleBase angle Applied force angleApplied force angle MOIMOI

Other ConsiderationsOther Considerations
Error: 92%Error: 92%• 0.34lbs vs. 0.3125 lbs (as tested)0.34lbs vs. 0.3125 lbs (as tested)
Friction: 18% of applied forceFriction: 18% of applied force Column Buckling not a factorColumn Buckling not a factor Yield Strength vs. Elastic ModulusYield Strength vs. Elastic Modulus

PrototypingPrototypingScaled up model:
Shortened length0.009” Spring Steel wiresMake-shift controlling mechanismNylon outer tubing
Triangle Controlling mechanism
analogous with a puppet

PrototypingPrototyping Artificial circulatory system (nylon tubing) Artificial circulatory system (nylon tubing)
was created to test the device was created to test the device Results showed that our design works.Results showed that our design works. Problems experienced:Problems experienced:
• Friction Friction • ExpansionExpansion• Sharp points at bifurcations Sharp points at bifurcations • Learning curve for controlling mechanism Learning curve for controlling mechanism

BudgetBudget
Remote-Operated Guiding Device
Description Amount
Personnel
4 Staff Engineers
$14,000 10 hours / week @ $25 / hour
1 Consultant
$980 1 hour / week @ $70 / hour
General
Overhead $14,000
Development $14,000
Total $42,980

Gantt ChartGantt Chart

Questions?Questions?