research topics - aem - aerospace engineering and ... a given pwa system and an initial state x0,...
TRANSCRIPT

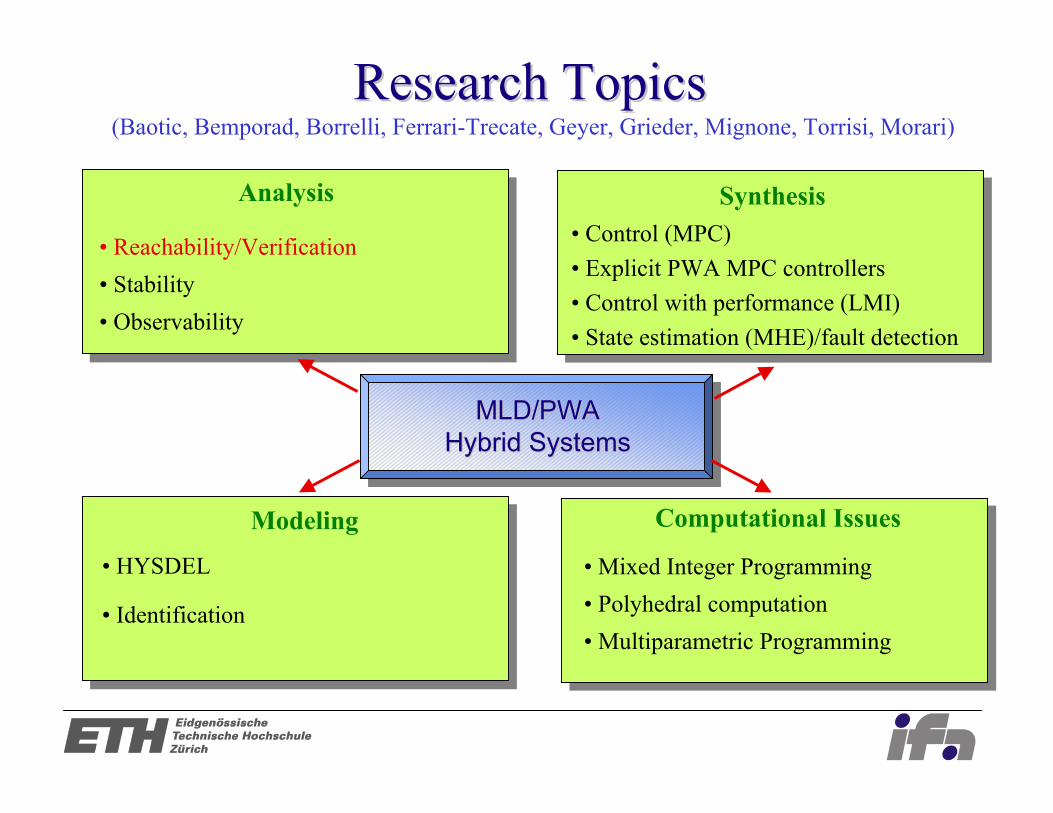
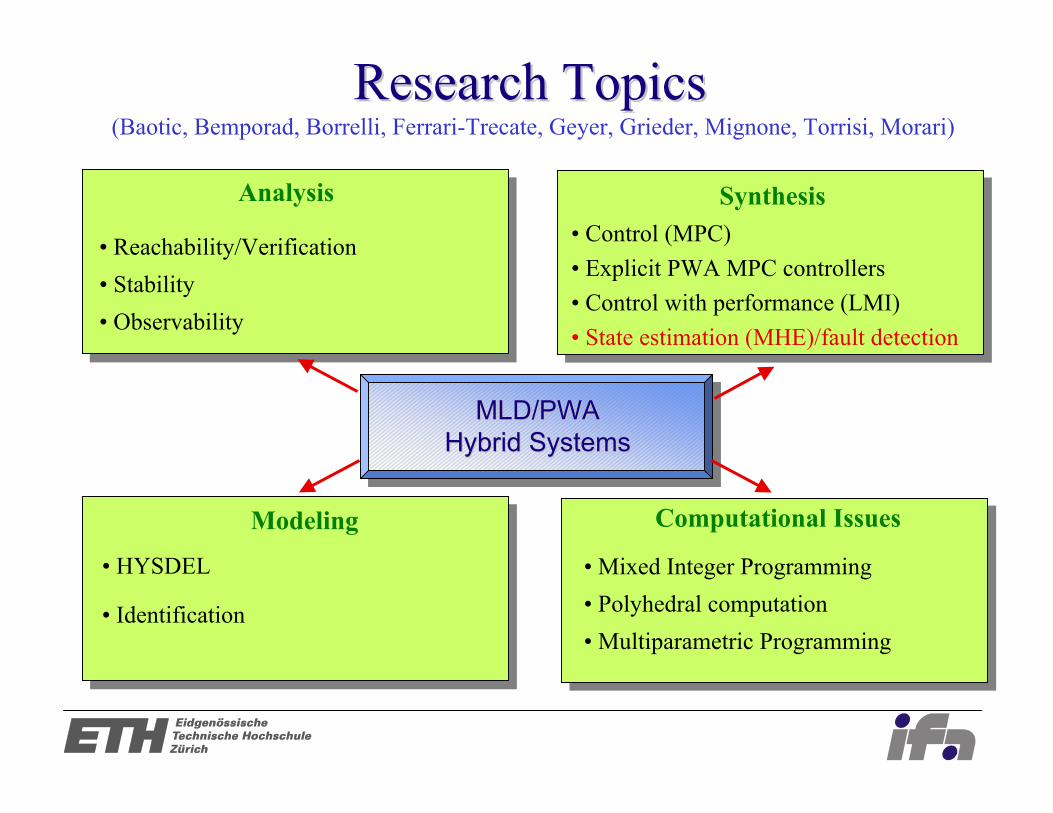
MLD/PWA MLD/PWA Hybrid SystemsHybrid Systems
• Reachability/Verification• Stability• Observability
• HYSDEL
• Identification
Research TopicsResearch Topics
Analysis
Computational IssuesModeling
• Control (MPC)• Explicit PWA MPC controllers• Control with performance (LMI)• State estimation (MHE)/fault detection
Synthesis
• Mixed Integer Programming• Polyhedral computation• Multiparametric Programming
(Baotic, Bemporad, Borrelli, Ferrari-Trecate, Geyer, Grieder, Mignone, Torrisi, Morari)

ObservabilityObservability
The MLD system is observable in T steps on Uandif there exists a scalar w > 0 such that, ∀ u(t){ }Tà1
t=0
minP
t=0Tà1 y 1(t) à y 2(t)k k∞ à w x 1 ,0 à x 2 ,0k k1 õ 0
x 1 ,0 , x 2 ,0 ∈ X(0)w.r.t. and u(t) ∈ U and subj. to the MLDequations + constraints.
X(0)
Observability is undecidable(Sontag, 1996)
(Sontag, 1996)
Sets of admissible initial states and inputsX (0 ) U
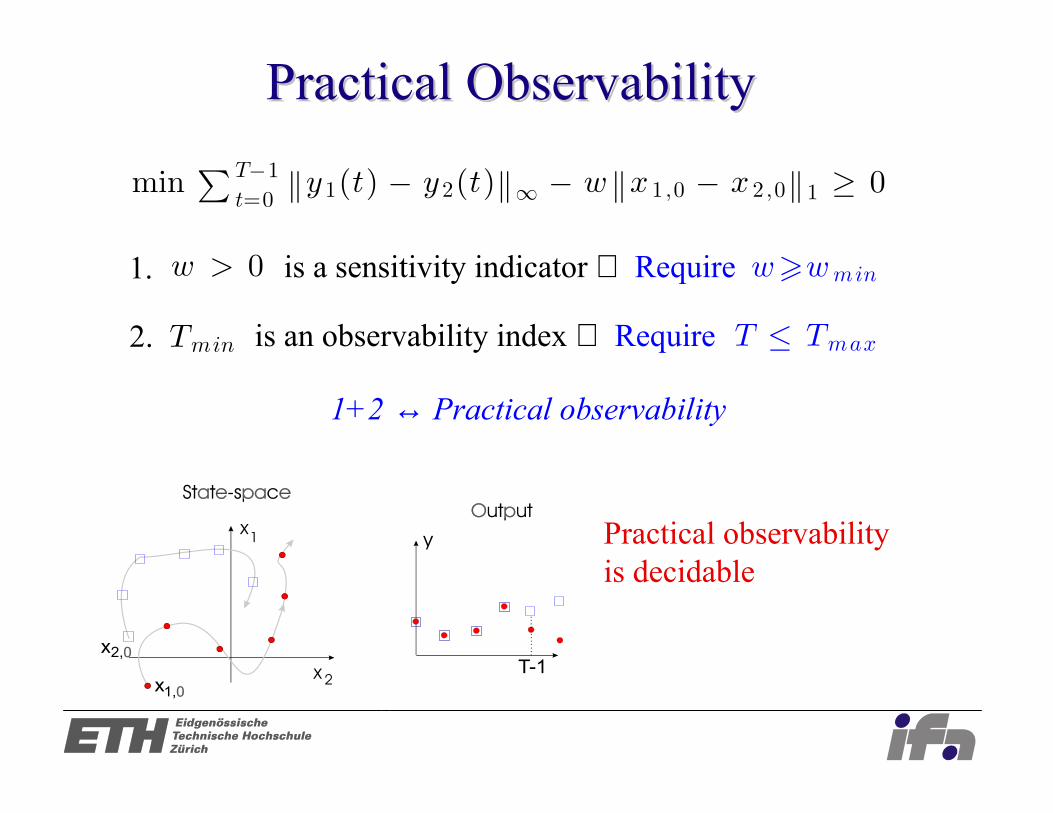
Practical ObservabilityPractical Observability
w > 0
minP
t=0Tà1 y 1(t) à y 2(t)k k∞ à w x 1 ,0 à x 2 ,0k k1 õ 0
Practical observability is decidable
1. is a sensitivity indicator ⇒ Require w>wmin
2. T ô Tmax
1+2 ↔ Practical observability
Tmin is an observability index ⇒ Require
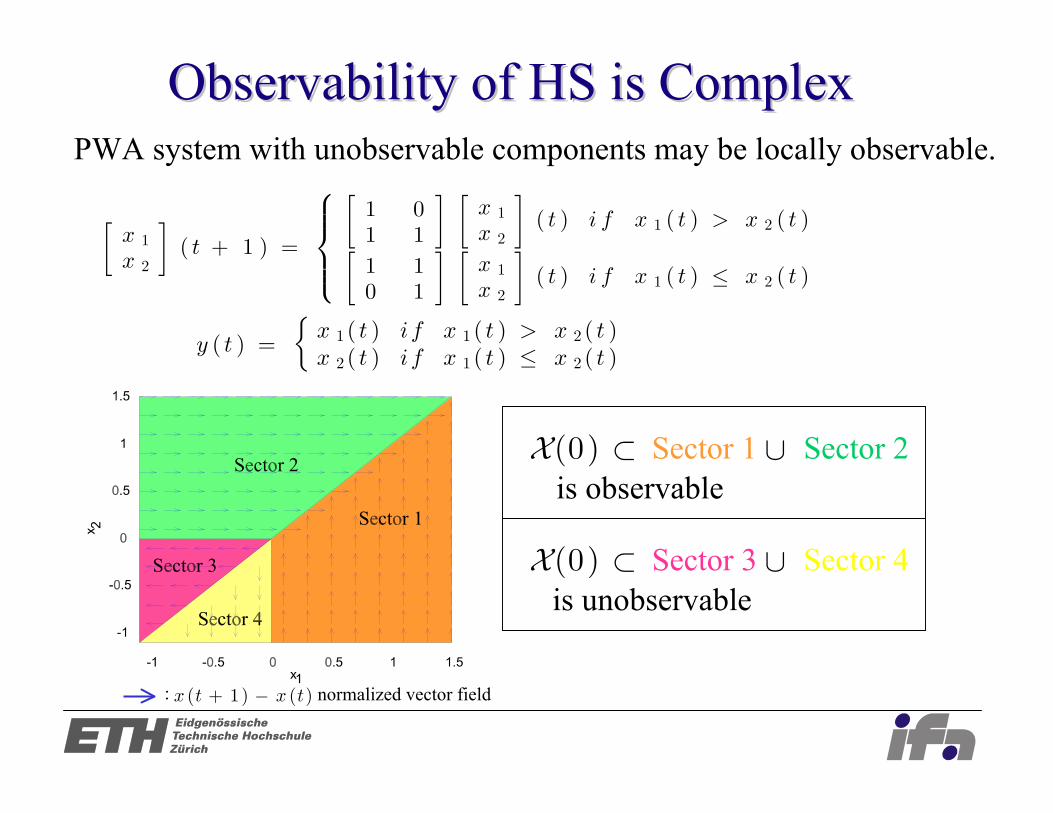
Observability Observability of HS is Complexof HS is ComplexPWA system with unobservable components may be locally observable.
x 1
x 2
ô õ( t + 1 ) =
1 01 1
ô õx 1
x 2
ô õ( t ) i f x 1 ( t ) > x 2 ( t )
1 10 1
ô õx 1
x 2
ô õ( t ) i f x 1 ( t ) ô x 2 ( t )
y ( t ) =
x 1 ( t ) i f x 1 ( t ) > x 2 ( t )x 2 ( t ) i f x 1 ( t ) ô x 2 ( t )
ú
: x (t + 1) à x (t) normalized vector field
X(0) ú Sector 1 ∪ Sector 2is observable
X(0) ú Sector 3 ∪ Sector 4is unobservable
Controllability of HS is ComplexControllability of HS is Complex
For a given PWA system and an initial state x0 , the problem of determining if there exists a control that drives x0 to the origin is undecidable.
For a given PWA system and an initial state x0 , the problem of determining if there exists a control that drives x0 to the origin in at most k step is NP-complete
MLD/PWA MLD/PWA Hybrid SystemsHybrid Systems
• Reachability/Verification• Stability• Observability
• HYSDEL
• Identification
Research TopicsResearch Topics
Analysis
Computational IssuesModeling
• Control (MPC)• Explicit PWA MPC controllers• Control with performance (LMI)• State estimation (MHE)/fault detection
Synthesis
• Mixed Integer Programming• Polyhedral computation• Multiparametric Programming
(Baotic, Bemporad, Borrelli, Ferrari-Trecate, Geyer, Grieder, Mignone, Torrisi, Morari)

• Is reachable from in steps ?
• Target sets (disjoint)
• A hybrid system X(0)
Σ
ReachabilityReachability Analysis/VerificationAnalysis/Verification
• Given:
Z1, Z2, . . ., ZL
t ô Tmax• Problem: Zi X(0)X(0)
Zi
XZi(0)
XZi(0)
• A set of initial conditions
• Time horizon
• If yes, from which subset of ? • Disturbance/input sequences driving to .
Z1
Z2
ZL
XZ1(0)
XZ2(0)
XZL(0)
X(0)
Tmax
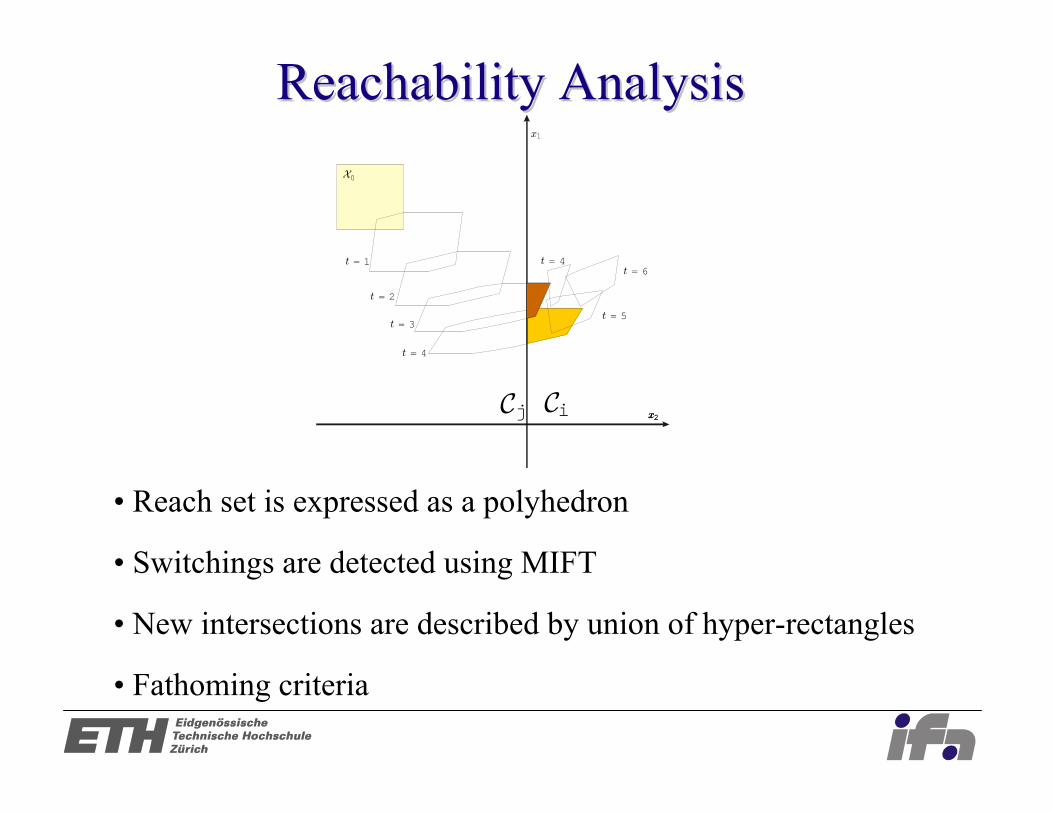
• Reach set is expressed as a polyhedron
• Switchings are detected using MIFT
• New intersections are described by union of hyper-rectangles
• Fathoming criteria
Reachability Reachability AnalysisAnalysisX0
t = 1
t = 2
t = 3
t = 4
x1
x2
t = 5
t = 6t = 4
x2x2Cj Ci

ApplicationsApplications• Safety ( = unsafe sets)Z1, Z2, . . ., ZL
• Stability ( = invariant set around the origin)Z1
• Scheduling
• Performance Assessment of Model Predictive Control( =invariant set around the origin, =set of infeasible states)Z1 Z2
Z1• Liveness ( =set to be reached within a finite time)
• Robust Simulation
MLD/PWA MLD/PWA Hybrid SystemsHybrid Systems
• Reachability/Verification• Stability• Observability
• HYSDEL
• Identification
Research TopicsResearch Topics
Analysis
Computational IssuesModeling
• Control (MPC)• Explicit PWA MPC controllers• Control with performance (LMI)• State estimation (MHE)/fault detection
Synthesis
• Mixed Integer Programming• Polyhedral computation• Multiparametric Programming
(Baotic, Bemporad, Borrelli, Ferrari-Trecate, Geyer, Grieder, Mignone, Torrisi, Morari)
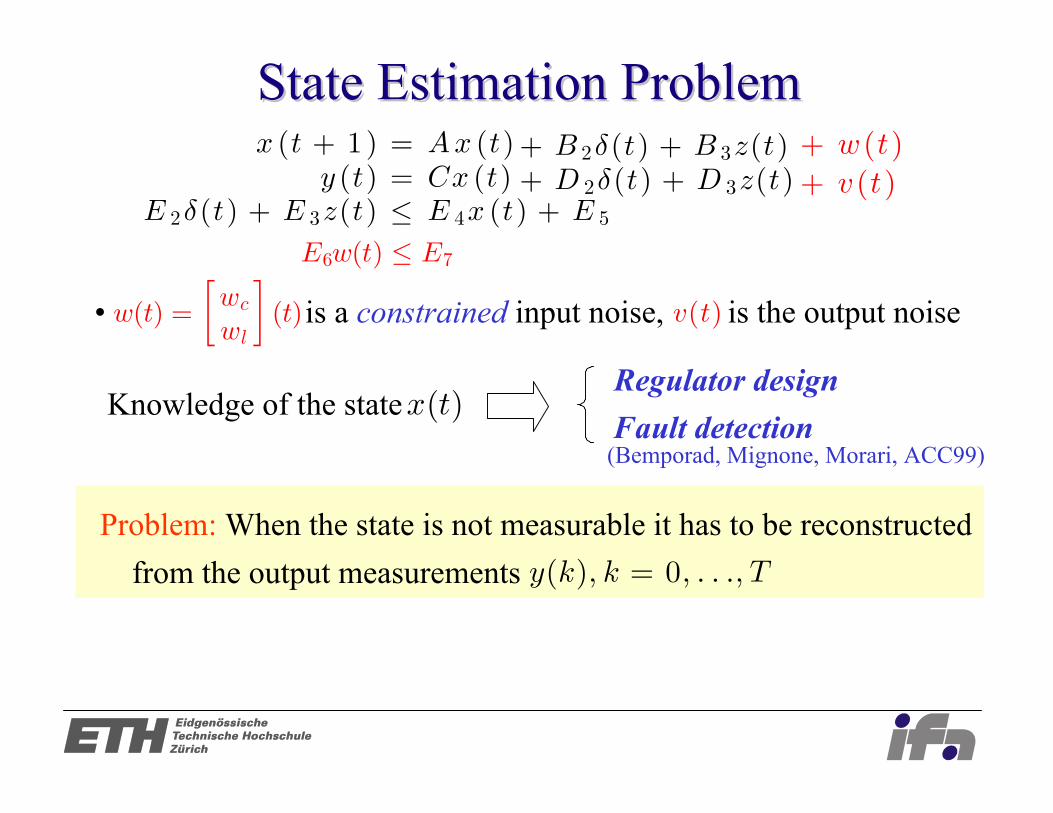
• is a constrained input noise, is the output noise
State Estimation ProblemState Estimation Problem
Knowledge of the stateRegulator designFault detection
Problem: When the state is not measurable it has to be reconstructed from the output measurements y(k), k = 0, . . ., T
x(t)
x (t + 1) = Ax (t)y (t) = Cx (t)
+ B 2î(t) + B 3z(t)+ D 2î(t) + D 3z(t)
E 2î(t) + E 3z(t) ô E 4x (t) + E 5
w(t) =wc
wl
ô õ(t) v(t)
+ w (t)+ v (t)
E6w(t) ô E7
(Bemporad, Mignone, Morari, ACC99)

Moving Horizon Estimation (MHE)Moving Horizon Estimation (MHE)
ΘãT =min
x(TàM),w
Pk=TàMTà1 kw(k)k2Q+kv(k)k2R+ΓTàM x(TàM)( )
Initial penalty (summarizing the neglected data)
(Michalska, Mayne, Morari, Muske, Rao, Rawlings ...)
: fixed time horizonM> 0
are available
Tà 1
y(TàM), . . ., y(Tà 1)
1) Solve
subj. to MLD dynamics + constraints
2) At time collect , shift the data window and cycle ...
and compute the estimates xê(TàM|T), . . ., xê(T|T)T y(T)
Time
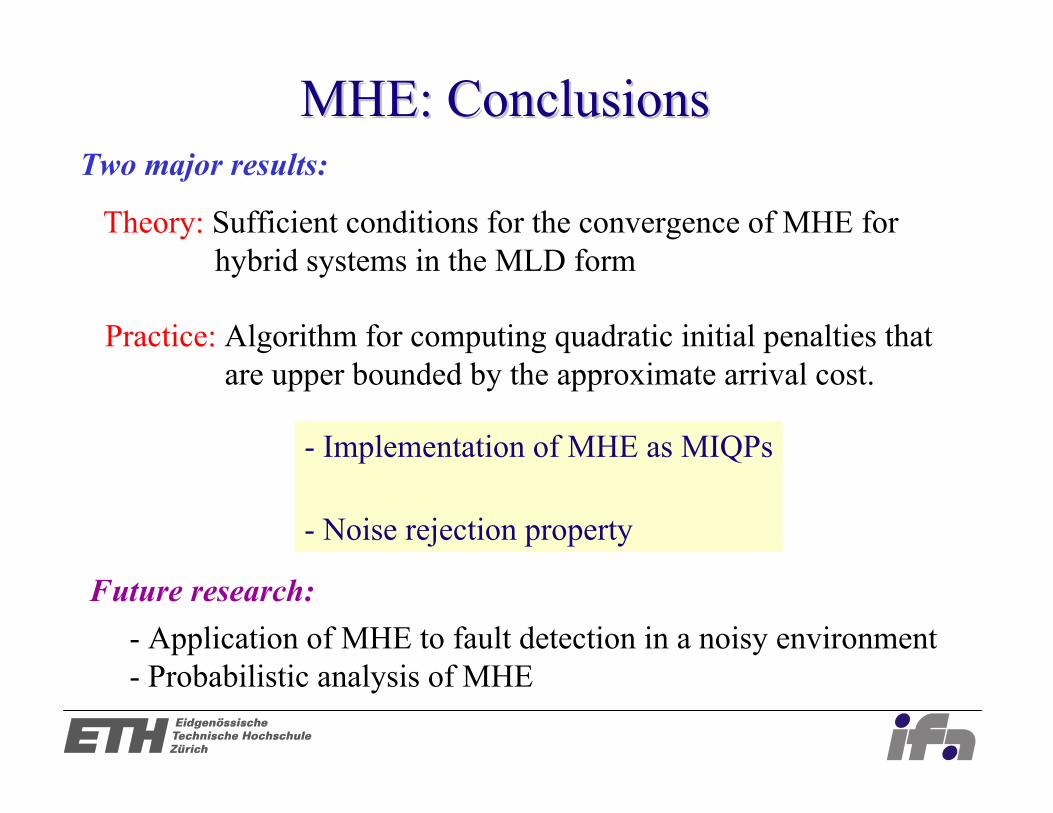
MHE: ConclusionsMHE: Conclusions
- Implementation of MHE as MIQPs
- Noise rejection property
Theory: Sufficient conditions for the convergence of MHE for hybrid systems in the MLD form
Practice: Algorithm for computing quadratic initial penalties that are upper bounded by the approximate arrival cost.
Two major results:
- Application of MHE to fault detection in a noisy environment- Probabilistic analysis of MHE
Future research:

MLD/PWA MLD/PWA Hybrid SystemsHybrid Systems
• Reachability/Verification• Stability• Observability
• HYSDEL
• Identification
Research TopicsResearch Topics
Analysis
Computational IssuesModeling
• Control (MPC)• Explicit PWA MPC controllers• Control with performance (LMI)• State estimation (MHE)/fault detection
Synthesis
• Mixed Integer Programming• Polyhedral computation• Multiparametric Programming
(Baotic, Bemporad, Borrelli, Ferrari-Trecate, Geyer, Grieder, Mignone, Torrisi, Morari)

IdentificationIdentification
• Model orders , fixedna nb
• models input/output constraints Examples:
Xë ô u (k) ô ì|y(k + 1) à y(k)| ô í
The shape of is knownX
The switching law is assumed unknown: Both the submodels and theshape of the regions must be estimated from the dataset
• The number of submodels is known s
Dataset: S = {(x(k), y(k)), k = 1, . . ., N}
If the regions are known the identification problem amounts to the identification of ARX models
Xis
Part Two Part Two –– Hybrid SystemsHybrid Systems• Hybrid systems and MLD Models• Research overview
– Hysdel– Observability/Controllability– Reachability/Verification*– State estimation– Identification
• Extension 4: Constrained optimal control of Hybrid/PWA Systems• State feedback solution of COC
– Characterization of the solution – Computation of the solution
• Examples

Extension 4: Hybrid/PWA SystemsExtension 4: Hybrid/PWA Systemsmin
U||Px(N)||p + P
k=0
Nà1 ||Qx(k)||p + ||Ru(k)||p
x(k) ∈ Rn, u(k) ∈ Rm, U,{u(0), u(1), . . ., u(N à 1)}
subj.to x(t +1) = Aix(t) +Biu(t) + fiif [x(t), u(t)] ∈ Xi, i = 1, . . ., s
Ex(k) +Lu(k) ô M, k = 0, . . ., N à 1x(N) ∈ Xf
u*(0) is used in a Receding Horizon fashion for infinite time control
Feedback control law?

Translation into Mixed Integer ProgramTranslation into Mixed Integer Program
s.t. Gï ô w +Fx(0)
minï
ïTHï + (fT + x(0)TF)ï
subj. to
x(N) ∈ Xf
x(k + 1) = Ax(k) +B1u(k) +B2î(k) +B3z(k)y(k) = Cx(k) +D1u(k) +D2î(k) +D3z(k)
E2î(k) + E3z(k) ô E1u(k) + E4x(k) + E5
minUN
J(UN, x(0)), kPx(N)kp + Pk=0
Nà1kQx(k)kp + kRu(k)kp
Mixed Integer Program
Equivalent MLD representation of the PWA system
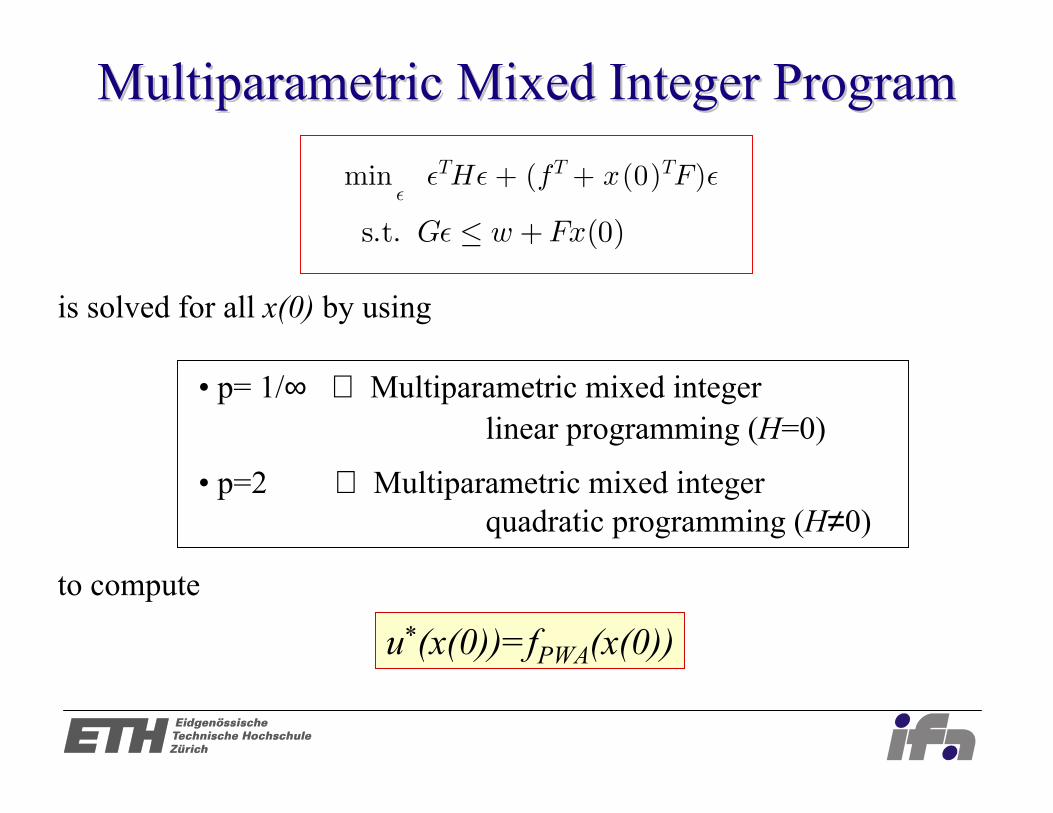
Multiparametric Mixed Integer ProgramMultiparametric Mixed Integer Program
is solved for all x(0) by using
• p= 1/∞ ⇒ Multiparametric mixed integerlinear programming (H=0)
• p=2 ⇒ Multiparametric mixed integer quadratic programming (H≠0)
s.t. Gï ô w +Fx(0)
minï
ïTHï + (fT + x(0)TF)ï
to compute
u*(x(0))=fPWA(x(0))

Part Two Part Two –– Hybrid SystemsHybrid Systems• Hybrid systems and MLD Models• Research overview
– Hysdel– Observability/Controllability– Reachability/Verification*– State estimation– Identification
• Extension 4: Constrained optimal control of Hybrid/PWA Systems• State feedback solution of COC
– Characterization of the solution – Computation of the solution
• Examples

Characterization of the Solution (p=2) Characterization of the Solution (p=2)
The solution to the optimal control problem is a time varying PWA state feedback control law of the form
partition of the set of feasible states x(k).{Pki}Nk
i=1
(Sontag 1981, Mayne 2001)
if x(k) ∈ Pki,{x : x0Lk
i(j)x +Mk
i(j)x ô Kk
i(j)}
uã(x(k)) = Fkix(k) +Gk
i
Xãk
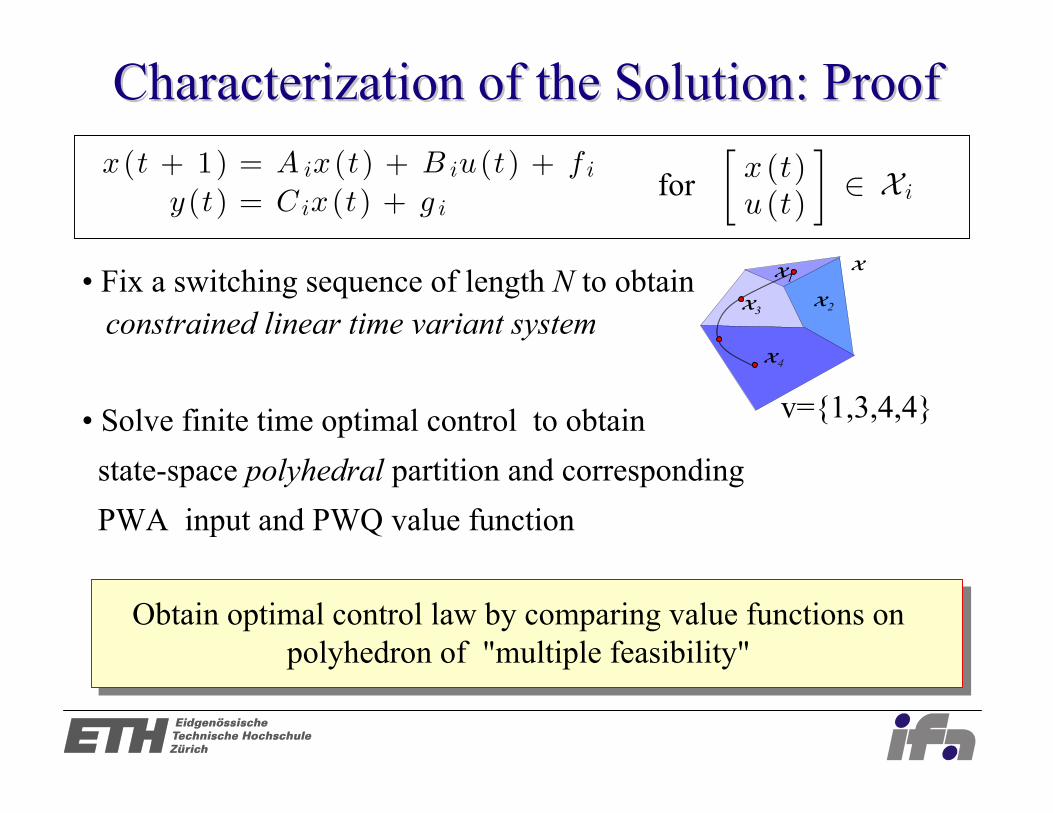
Characterization of the Solution: ProofCharacterization of the Solution: Proof
• Fix a switching sequence of length N to obtainconstrained linear time variant system
• Solve finite time optimal control to obtainstate-space polyhedral partition and correspondingPWA input and PWQ value function
v={1,3,4,4}
x(t + 1) = A ix(t) + B iu(t) + f i
y (t) = Cix(t) + g ifor x (t)
u (t)
ô õ∈ X i
Obtain optimal control law by comparing value functions on polyhedron of "multiple feasibility"
v1={1,2,3,4}
v2={1,2,3,3}
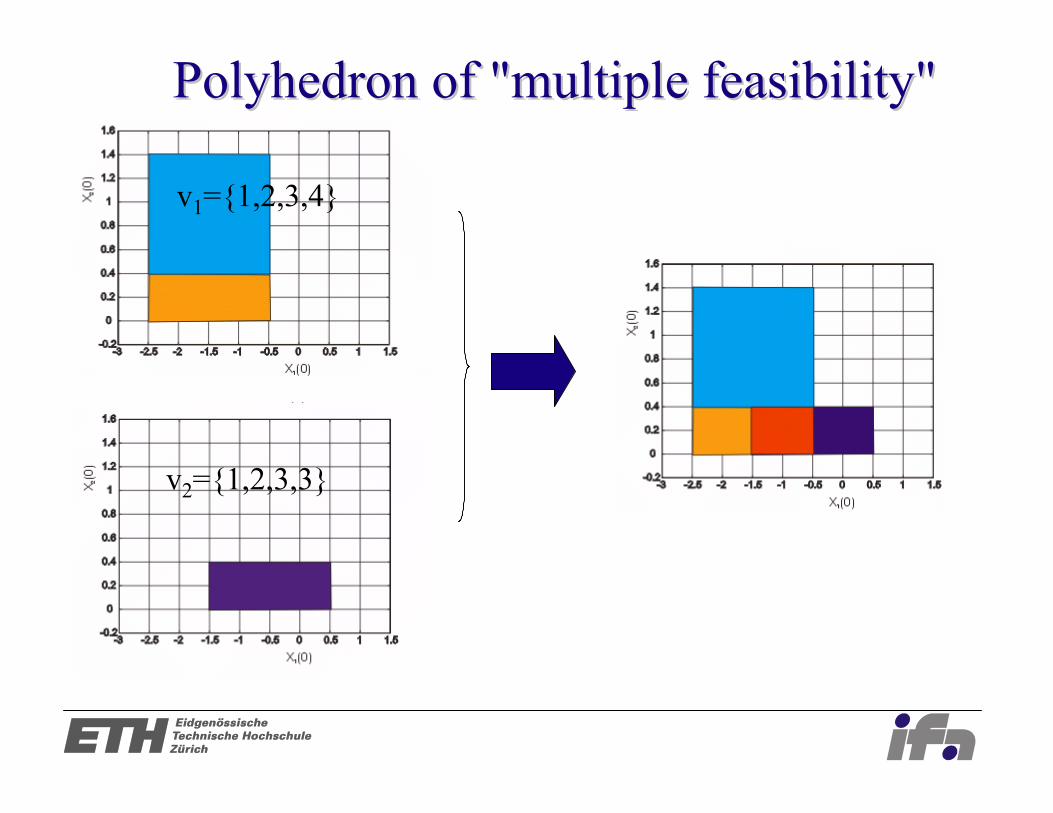
Polyhedron of "multiple feasibility"Polyhedron of "multiple feasibility"

v1={1,2,3,4}
v2={1,2,3,3}
Polyhedron of multiple feasibility:switch v1 and v2 both admissible
Polyhedron of "multiple feasibility"Polyhedron of "multiple feasibility"

v1={1,2,3,4}
v2={1,2,3,3}
Polyhedron of "multiple feasibility"Polyhedron of "multiple feasibility"

v1={1,2,3,4}
v2={1,2,3,3}
1
2 3 4 5
Polyhedron of "multiple feasibility"Polyhedron of "multiple feasibility"
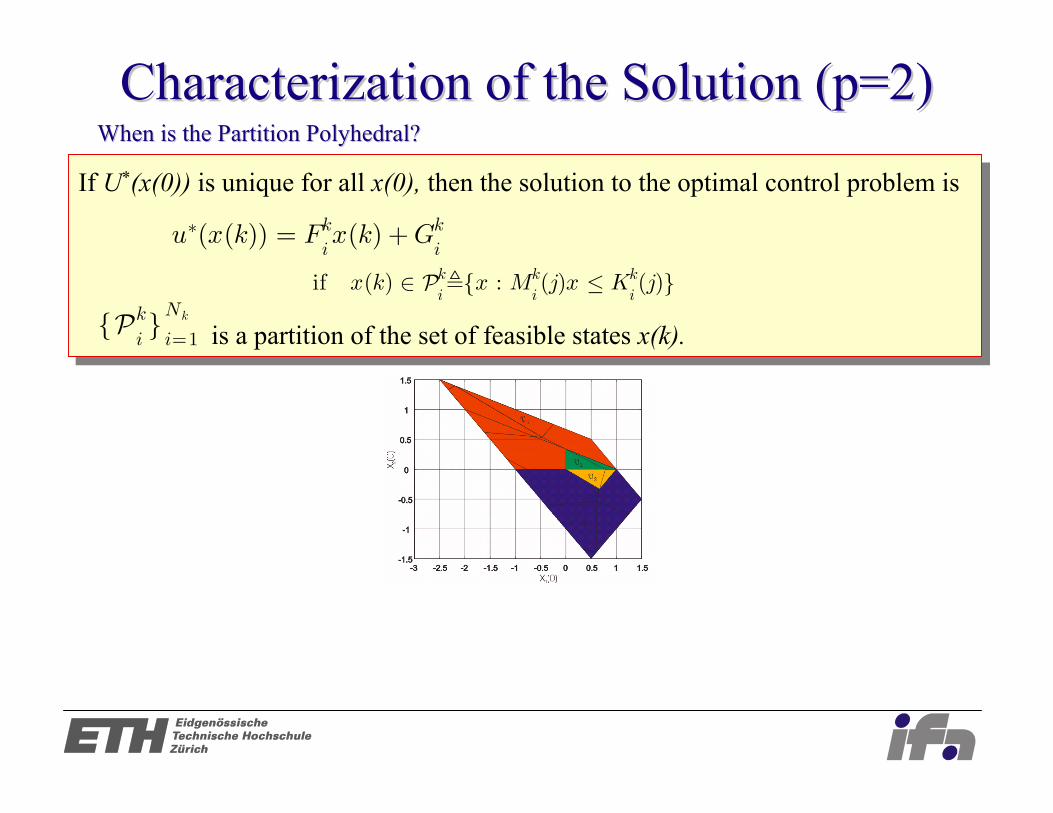
If U*(x(0)) is unique for all x(0), then the solution to the optimal control problem is
is a partition of the set of feasible states x(k).
If U*(x(0)) is unique for all x(0), then the solution to the optimal control problem is
is a partition of the set of feasible states x(k).
When is the Partition Polyhedral?When is the Partition Polyhedral?
{Pki}Nk
i=1
Characterization of the Solution (p=2) Characterization of the Solution (p=2)
if x(k) ∈ Pki,{x : Mk
i(j)x ô Kk
i(j)}
uã(x(k)) = Fkix(k) +Gk
i

Polyhedral Partition: ProofPolyhedral Partition: Proof
Continuity of the PWA optimal control law excludes Case 3
• Possible intersections of the value functions
Case 1 Case 2 Case 3
Characterization of the Solution (p=1,Characterization of the Solution (p=1,∞∞))
The solution to the optimal control problem is a PWA state feedback control law of the form
is a partition of the set of feasible states x(k).{Pki}Nk
i=1
uã(x(k)) = Fkix(k) +Gk
i
if x(k) ∈ Pki,{x : Mk
i(j)x ô Kk
i(j)}
Xãk
Part Two Part Two –– Hybrid SystemsHybrid Systems• Hybrid systems and MLD Models• Research overview
– Hysdel– Observability/Controllability– Reachability/Verification*– State estimation– Identification
• Extension 4: Constrained optimal control of Hybrid/PWA Systems• State feedback solution of COC
– Characterization of the solution – Computation of the solution
• Examples
mpmp--MIQPMIQP
Solver based on
– Dynamic programming recursion
– Multiparametric quadratic program solver (mp-QP)
– Basic polyhedral manipulation (intersection and union)
– Special data structure for storing the solution
(Borrelli, Baotic, Bemporad, Morari, 2002)
mpmp--MILPMILP• Efficient algorithm based on branch and bound
• Successfully applied to a Traction Control problem
• Practical disadvantages of 1/∞ norms– satisfactory performance only with long time-horizons– performance may not depend smoothly on the weights in the
performance index
• Cannot be extended to mp-MIQP
(Dua, Pistikopoulos, 1999)
• mp-QP Bemporad, Morari, Dua, Pistikopoulos, 2000 Godwin, De Dona’, 2000 Tondel, Johansen, Bemporad, 2001
• mp-LP Gal, 1972Borrelli, Bemporad, Morari, 2000
• mp-MILP Dua, Pistikopoulos, 1999
• mp-MIQP Borrelli, Baotic, Bemporad, Morari, 2002Dua, Pistikopoulos, 2002
• mp-QP Bemporad, Morari, Dua, Pistikopoulos, 2000 Godwin, De Dona’, 2000 Tondel, Johansen, Bemporad, 2001
• mp-LP Gal, 1972Borrelli, Bemporad, Morari, 2000
• mp-MILP Dua, Pistikopoulos, 1999
• mp-MIQP Borrelli, Baotic, Bemporad, Morari, 2002Dua, Pistikopoulos, 2002
Multiparametric Program SolversMultiparametric Program Solvers
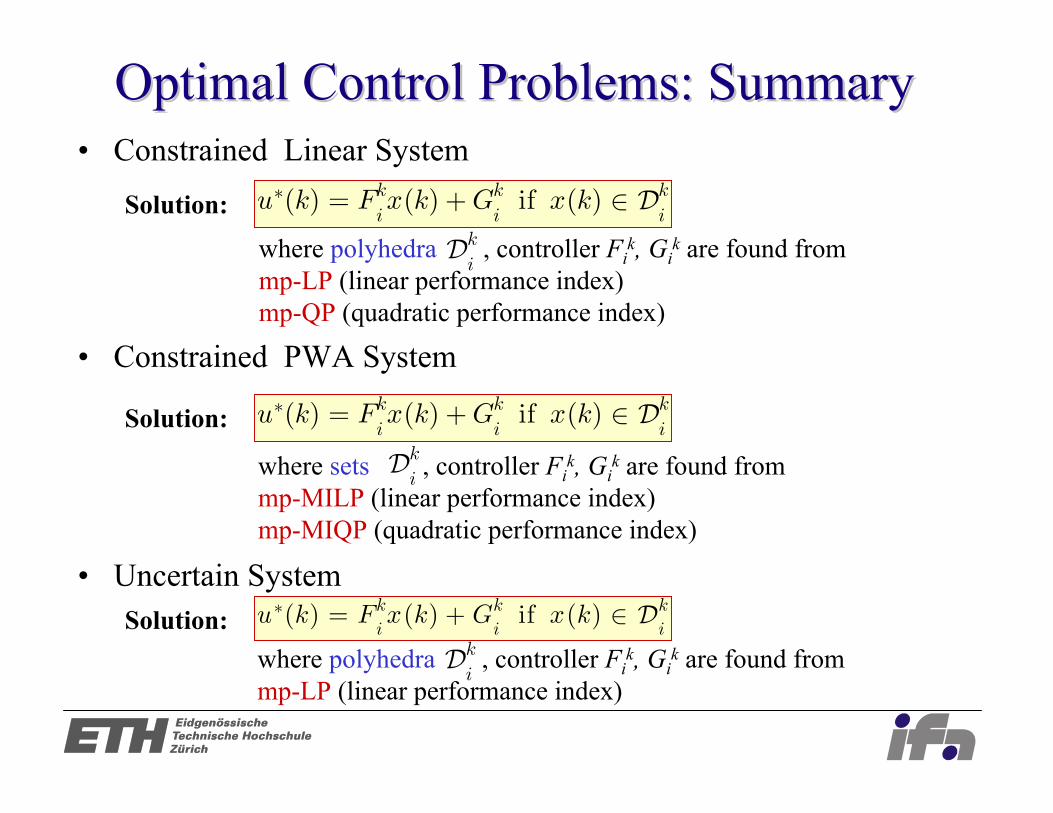
Optimal Control Problems: SummaryOptimal Control Problems: Summary• Constrained Linear System
• Constrained PWA System
• Uncertain System
uã(k) = Fkix(k) +Gk
iif x(k) ∈ Dk
iSolution:where polyhedra , controller Fi
k, Gik are found from
mp-LP (linear performance index)mp-QP (quadratic performance index)
Dki
uã(k) = Fkix(k) +Gk
iif x(k) ∈ Dk
iSolution:
where sets , controller Fik, Gi
k are found from mp-MILP (linear performance index)mp-MIQP (quadratic performance index)
Dki
uã(k) = Fkix(k) + Gk
iif x(k) ∈ Dk
iSolution:where polyhedra , controller Fi
k, Gik are found from
mp-LP (linear performance index)Dk
i
Part Two Part Two –– Hybrid SystemsHybrid Systems• Hybrid systems and MLD Models• Research overview
– Hysdel– Observability/Controllability– Reachability/Verification*– State estimation– Identification
• Extension 4: Constrained optimal control of Hybrid/PWA Systems• State feedback solution of COC
– Characterization of the solution – Computation of the solution
• Examples

• Traction control (Ford Research Center )
• Gas supply system (Kawasaki Steel )• Batch evaporator system (Esprit Project 26270 )• Anesthesia (Hospital Bern )• Hydroelectric power plant ( )• Power generation scheduling ( )
• Integrated management of the power-train ( )
• Gear shift operation on automotive vehicles ( )
ApplicationsApplications

Simple ExampleSimple Example
Furnaces

Amount of heating power is constant
(Hedlund and Rantzer, CDC1999)
Bi =
10
ô õif first furnace heated
01
ô õif second furnace heated
00
ô õif no heating
• Objective: • Control the temperature
to a given set-point
• Constraints:• Only three operation modes:
1- Heat only the first furnace2- Heat only the second furnace3- Do not heat any furnaces
Tç1Tç2
ô õ= à 1 0
0 à 2
ô õT1
T2
ô õ+Biu0
T1, T2
u0
Alternate Heating of Two FurnacesAlternate Heating of Two Furnaces

• MLD system
• mp-MILP optimization problem
to be solved in the region
• Computational complexity of mp-MILP
minv2
0
n o J(v20, x(t)),P
k=02 kR(v(k + 1)à v(k))k∞+ kQ(x(k|t)à xe)k∞
u(t) =1 0 0[ ] if first furnace heated0 1 0[ ] if second furnace heated0 0 1[ ] if no heating
State x(t) 2 variables
Input u(t) 3 variables
Aux. binary vector δ(t) 0 variables
Aux. continuous vector z(t) 9 variables
à 1 ô x1 ô 1à 1 ô x2 ô 10 ô u0 ô 1
linear constraints 168
continuous variables 33
binary variables 9
parameters 3
time to solve the mp-MILP 5 min
number of regions 105
Sampling time = 0.08 s
Alternate Heating of Two FurnacesAlternate Heating of Two Furnaces
parameterized !

T1
T2
Heat 2
No Heat
mpmp--MILP SolutionMILP Solutionu0=0.8
T1
T2
Heat 1
Heat 2
No Heat
X1
X2
X1
X2
u0=0.4
Set point cannot be reached Set point is reached
Heat 1

ExampleExample
Traction Control

Hybrid Control Design for Traction Hybrid Control Design for Traction ControlControl
• Francesco Borrelli • Alberto Bemporad• Manfred Morari
• Mike Fodor• Davor Hrovat• Mitch McConnell