reviewarticle safetyofautonomousvehicles - hindawi
TRANSCRIPT

Review ArticleSafety of Autonomous Vehicles
Jun Wang,1 Li Zhang,1 Yanjun Huang,2 and Jian Zhao 2
1Department of Civil and Environmental Engineering, Mississippi State University, Starkville, MS 39762, USA2Department of Mechanical and Mechatronics Engineering, University of Waterloo, 200 University Avenue West, Waterloo,ON N2L 3G1, Canada
Correspondence should be addressed to Jian Zhao; [email protected]
Received 1 June 2020; Revised 3 August 2020; Accepted 1 September 2020; Published 6 October 2020
Academic Editor: Francesco Bella
Copyright © 2020 Jun Wang et al. *is is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Autonomous vehicle (AV) is regarded as the ultimate solution to future automotive engineering; however, safety still remains thekey challenge for the development and commercialization of the AVs. *erefore, a comprehensive understanding of the de-velopment status of AVs and reported accidents is becoming urgent. In this article, the levels of automation are reviewedaccording to the role of the automated system in the autonomous driving process, which will affect the frequency of thedisengagements and accidents when driving in autonomous modes. Additionally, the public on-road AV accident reports arestatistically analyzed.*e results show that over 3.7 million miles have been tested for AVs by various manufacturers from 2014 to2018. *e AVs are frequently taken over by drivers if they deem necessary, and the disengagement frequency varies significantlyfrom 2×10−4 to 3 disengagements per mile for different manufacturers. In addition, 128 accidents in 2014–2018 are studied, andabout 63% of the total accidents are caused in autonomousmode. A small fraction of the total accidents (∼6%) is directly related tothe AVs, while 94% of the accidents are passively initiated by the other parties, including pedestrians, cyclists, motorcycles, andconventional vehicles. *ese safety risks identified during on-road testing, represented by disengagements and actual accidents,indicate that the passive accidents which are caused by other road users are the majority. *e capability of AVs to alert and avoidsafety risks caused by the other parties and to make safe decisions to prevent possible fatal accidents would significantly improvethe safety of AVs. Practical applications. *is literature review summarizes the safety-related issues for AVs by theoretical analysisof the AV systems and statistical investigation of the disengagement and accident reports for on-road testing, and the findings willhelp inform future research efforts for AV developments.
1. Introduction
With the demands on reducing traffic accidents, congestion,energy consumption, and emissions, autonomous drivingtechnology has been recognized as one of the promisingsolutions to these critical social and environmental issues.An autonomous vehicle (AV, i.e., automated or self-drivingvehicle) equipped with advanced technologies assists ahuman driver or to control the vehicle independently, wherehuman interference may not be required [1, 2]. *e controldecisions, such as accelerating, deaccelerating, changinglanes, and parking, can be made by a human driver or anautonomous system, depending on the automated levels ofthe vehicle and the perception results of the surroundingenvironment (e.g., pedestrians, cyclists, other vehicles, trafficsignals, and school zones) [2–5]. Vehicle automation can be
divided into several levels, e.g., no automation, partial au-tomation, high automation, or full automation according tothe involvement of a human driver or automated system inmonitoring the surrounding environment and control thevehicle.
*e autonomous technology employed in transportationsystems brings opportunities to mitigate or even solvetransportation-related economic and environmental issues,and therefore, the autonomous vehicle has been activelystudied recently [6]. AV techniques are capable of changingthe traditional means of transportation by (i) improvingroad safety, where human errors account for 94% of the totalaccidents [7], (ii) enhancing the commute experience, viaworking or entertaining instead of driving and shorteningthe commute time when the traffic path is planned [8, 9] orthe parking task is conducted autonomously [10, 11], and
HindawiJournal of Advanced TransportationVolume 2020, Article ID 8867757, 13 pageshttps://doi.org/10.1155/2020/8867757

(iii) improving mobility for everyone, which enables dif-ferently abled people to access transportation and improvetheir independence [2, 12]. In 2011, more than 5.3 millionvehicle crashes were reported in the United States, leading toapproximately 2.2 million injuries, 32 thousand fatalities,and billions of dollars losses [1]. According to [13], thecrashes caused by human factors, including speeding, dis-tractive driving, alcohol, and other behaviors, take up 93% ofthe total crashes. By minimizing the involvement of humanoperations, AVs have the potential to significantly reduce carcrashes. According to the Insurance Institute for HighwaySafety [1], partially autonomous technology such as forwardcollision and lane departure warning systems, side viewassist, and adaptive headlights will potentially prevent ormitigate crashes, and the reduction in injuries and fatalitiescan be up to 33%.When a human operator is not required tooperate a vehicle, it would enable the blind, disabled, andthose too young to drive, enhancing their independence,social connection, and life experience [14, 15]. AVs wouldalso reduce the needs in mass transit or paratransit agencies,which saves the costs borne by the taxpayer and improvessocial welfare. *e owner and the community will alsobenefit from the development of the autonomous technologyfrom (i) the potential for fuel savings in terms of better fleetmanagement [16–19] to avoid congestion [9, 20] and moremanageable parking arrangement [10], and (ii) the potentialof relieving people from the stress of commute driving,perhaps even taking a snap on the way to work [21]. *esubstantial potential to reduce the congestion would benefitnot only AV drivers but also other drivers. Even thoughsignificantly increased AV users may potentially increase thecongestion [13], the traffic conditions may also be improvedby optimized vehicle operation and reduced crashes anddelays [22, 23]. With an improved transportation system,AV techniques have a significant potential to save energyand reduce emissions [17, 24]. *e benefits of energy-savingmay be resulted from a smooth accelerating and deceleratingin comparison to a human driver, better fleet managementby lowering peak speeds and higher effective speeds, reducedtravel time, and lighter design of vehicles because of fewercrashes [1]. If lighter vehicles can be enabled by autonomoustechnology, the use of electric vehicles can be promoted dueto the improved driveable range [1]. Accordingly, emissionsin the whole transportation ecosystem can be reduced.Studies also indicate that advanced lateral control scheme forAVs can also improve pavement sustainability [25, 26].
*e significant potential benefits brought by autono-mous technology have driven the development of AVs in thepast four decades. From the 1980s to 2003, AV studies aremainly led by universities with a focus on two technicalpathways: infrastructure-centered and vehicle-centeredtechnology developments. *e former requires advancedhighway infrastructure systems to guide the vehicles,whereas the latter one does not. Between 2003 and 2007, theU.S. Defense Advanced Research Projects Agency (DARPA)led the development of AV techniques in both rural andurban areas. After 2007, private companies, such as Google,Audi, Toyota, and Nissan, continue this technology devel-opment because of the increasing demands on AV
technologies [1]. Recently, the road testing of such tech-nologies is booming [27]. In fact, various features have beenwidely used in modern vehicles including lane-keeping,collision avoidance, automatic braking, adaptive cruisecontrol (ACC), and onboard navigation to assist humandrivers [28]. In recent years, many manufacturers, as well ashigh-tech companies, joined this AV competition. Audi,BMW, Mercedes-Benz, Volkswagen, Volvo, Ford, GeneralMotors, Toyota, Nissan, as well as Google, Baidu, and otherresearch institutes, have begun testing on- and off-road AVs[13, 28].
Even though AVs have been substantially improved,fully autonomous vehicles are still not ready for commer-cialization. *e obstacles mainly come from safety concerns.Moody et al.’s studies indicated that the youth with highsalary and education male are the most optimistic about theAV safety [29], while western European countries are morepessimistic about the safety in comparison with Asiancountries [30]. *ey claim that the optimism of autonomoustechnology among risk-taking people in developing coun-tries may promote the global development of AVs. Lee et al.’sstudies indicated that safety risks can affect customers’ in-tention to use autonomous vehicles [31]. In addition, a ‘safe’AV should be able to obey traffic laws and to avoid roadhazards automatically and effectively [21]. It should be notedthat for a fully automated vehicle, human factors in thevehicle-human interface are one of the most significantconcerns [2]. Regulations, in which the role of the humandriver is defined, can be changed depending on the progressof the AV technology development. In turn, the levels ofautomation and its maturity can also affect the regulation-making [32], e.g., whether a human driver should be re-sponsible for monitoring the surrounding environmentthroughout the autonomous driving modes or immediatelytaking over the control when an AV failure occurs [13]. Inother words, AV safety can be affected by various social andtechnical factors, including automation level definition,regulation-making, nature of vehicles, road and trafficconditions, and even weather conditions. *erefore, acomprehensive understanding of the definition of auto-mation levels for vehicles, types of potential and reportedaccidents, and current status of on-road testing will bebeneficial for the AV technology development.
*erefore, it is urgent to conduct a careful investigationof the available data on AV-related accidents and the po-tential accident prediction when the AV technology movesforward to higher automation levels. Great efforts have beendevoted to AV technology development; however, anupdated statistical point of view for the safety issues ismissing in the literature. *e safety issues for AVs have beenreported individually in the literature, and critical analysisabout the status and causes would be beneficial for thefurther design and development of AVs. *is is of greatsignificance for the related personnel to understand thesystem failures and possible causes.
*e objectives of the study are, therefore, to systemat-ically analyze the safety issues related to autonomoustechnology applied to vehicular applications. *e levels ofautomation in vehicles are reviewed in Chapter 2, and the
2 Journal of Advanced Transportation

types of accidents and their potential causes are compre-hensively analyzed in Chapter 3. *e current status of theon-road testing and accidents are investigated in Chapter 4,and finally, the opportunities and challenges for AV safetystudies are discussed in Chapter 5.
2. Levels of Automation
*e definition of AVs is crucial for regulation makers tominimize the impact of this technology on traditional roadusers, such as other vehicles, pedestrians, bicyclists, and evenconstruction workers. As aforementioned, the automationlevels of the vehicles depend on the complexity of the au-tonomous technology applied, the perception range of theenvironment, and the degree of a human driver or vehiclesystem get involved in the driving decision, which is closelyrelated to the AV safety. *e definition of automation levelsfrom various organizations is thus summarized and com-pared in this section.
*e traditional definition of the automation levels wasreported by Sheridan and Verplank [33] as early as 1987 andlater modified by Parasuraman et al. [34] in 2000. Ten levelsof automation are defined based on roles of the humanoperator and vehicle system in the driving process. Level 1means no automation is involved and human makes alldecisions and takes all actions. In Level 2 to 4, the systemscan suggest a complete set of the alternative decision oraction plans, but human supervisors decide to execute thesuggested actions or not. From Level 5, the system is be-coming capable of executing a decision with a human op-erator’s approval. At Level 6, the system allows the humandriver to react within a certain time span before the auto-matic action. At Level 7, after an automatic action, thesystem will inform the human supervisor; while at Level 8,the system will not inform the human supervisor unless it isasked. At Level 9, the system will decide if the human su-pervisor will be informed or not after an automatic action.Level 10 means fully automation, completely ignoring hu-man factors. *e details of the ten levels of automation canbe found elsewhere [33, 34].
In aerospace engineering, the levels of automation arevaried, and generally, six levels are defined, which is knownas the Pilot Authorisation and Control of Tasks (PACT)framework [35]. *is automation system is labeled fromLevel 0 to 5. Level 0 denotes no computer autonomy, andLevel 5 means the systems can be fully automatic but can stillbe interrupted by a human pilot. In addition to humancommanded and automatic modes, the PACT also recom-mended four assisted modes depending on the operationalrelations between human pilots and the systems. *e detailsof the six levels can be found in [35].
In automotive engineering, the U.S. National HighwayTraffic Safety Administration (NHTSA) defined five levels ofautomation [36]. In this system, the automation levels aredivided into 5 categories, which are numbered from 0 to 4.Level 0 represents no automation, where the drivers com-pletely control the vehicles. *e highest level, Level 4,represents fully self-driving automation, where the vehicle isable to monitor external conditions and perform all driving
tasks. It can be seen that most of the current autonomousvehicle development activities can be classified into Level 3,limited self-driving automation, where the drivers are able totake over the driving in some instances. Recently, NHTSAhas adopted a more widely used definition of AVs based onthe Society of Automotive Engineers (SAE) [2], which isregularly updated [37]. SAE defines 6 levels of automationfor vehicles from 0 (no automation) to 5 (full driving au-tomation) based on the extent to which the human factor isrequired for the automation system. Six levels of drivingautomation are defined by SAE, which is widely adopted byautomobile manufacturers, regulators, and policymakers[2, 37–39].*ese automation levels are divided by the role ofthe human driver and automation system in the control ofthe following driving tasks: (i) execution of steering andthrottle control, (ii) monitoring driving environment, (iii)fallback of dynamic driving task (DDT), and (iv) systemcapability of various autonomous driving modes. Accordingto the role of a human driver in the DDT, Levels 0–2 rely onthe human driver to perform part of or all of the DDT, andLevels 3–5 represent conditional, high, and full drivingautomation, respectively, meaning that the system canperform all the DDTwhile engaged. *is detailed definitionof the levels of vehicle automation is widely used for currentAV development activities. *e six levels of driving auto-mation defined by the Society of Automotive Engineer(SAE) are shown as follows [2, 37, 40]:
(i) Level 0 (No Automation). All driving tasks are ac-complished by the human operator.
(ii) Level 1 (Driver Assistance). *e human operatorcontrols the vehicle, but driving is assisted with theautomation system.
(iii) Level 2 (Partial Driving Automation). Combinedautomated functions are applied in the vehicle, butthe human operator still monitors the environmentand controls the driving process.
(iv) Level 3 (Conditional Driving Automation). *ehuman operator must be prepared to operate thevehicle anytime when necessary.
(v) Level 4 (High Driving Automation). *e automationsystem is capable of driving automatically undergiven conditions, and the human driver may be ableto operate the vehicle.
(vi) Level 5 (Full Driving Automation). *e automationsystem is capable of driving automatically under allconditions, and the human driver may be able tocontrol the vehicle.
It can be seen from the various definitions of automationlevels by different organizations that human operators andvehicle systems can be involved in the driving processes atdifferent degrees. *is implies that the safety concerns forpartially, high, and fully autonomous vehicles can be variedsignificantly. When the AVs are operated in no automation,partial automation, or high automation modes, the inter-action between human operators and machines can be asignificant challenge for AV safety; when AVs are operated
Journal of Advanced Transportation 3

at fully automation modes, the reliability of the software andhardware will become a vital issue. In other words, as moreautonomous technology is applied in vehicles, the com-plexity of the autonomous system grows, which bringschallenges for system stability, reliability, and safety.*erefore, theoretical analysis of the potential AV errors willbe urgent to understand the current AV safety status and topredict the safety level in the future.
3. Types of Errors for Autonomous Vehicles
As more autonomous techniques are employed, differenttypes of errors may be generated. If such errors are notproperly handled, they may lead to critical safety issues. Asystematical analysis of different types of errors or accidentsfor the AV technology will be helpful for the understandingcurrent status of AV safety. It should be noted that theaccidents reported in the literature for AVs are extremelyless in comparison with those for traditional vehicles.However, it does not necessarily mean that current AVs aresafer than human-controlled vehicles. Since the AV tech-nology is still at the early stage of the commercialization andfar away from the fully autonomous driving, more road testsshould be done and the accident database may show adifferent trend.
AV safety is determined by the reliability of the AVarchitecture and its associated hardware and software.However, AV architecture is highly dependent on the level ofautomation such that AV safety may show different patternsat different stages. Even at the same automation level, thearchitecture of AVs may also vary in different studies.Figure 1 shows the general architecture and major com-ponents for AVs. A typical AV is composed of a sensor-based perception system, an algorithm-based decision sys-tem, and an actuator-based actuation system, as well as theinterconnections between systems [41, 42]. Ideally, allcomponents of the AVs should function well such that theAV safety can be ensured.
3.1. Accidents Caused by Autonomous Vehicle. Safety issuesor accidents of AVs are highly related to the errors com-mitted by AVs within various automation levels. Generally,such errors can be categorized according to the above-mentioned architecture.
3.1.1. Perception Error. *e perception layer is responsiblefor acquiring data from multiple sensing devices to perceiveenvironmental conditions for real-time decision making[41, 43].*e development of AVs is primarily determined bythe complexity, reliability, suitability, and maturity ofsensing technology [43]. *e sensors for environmentperception include, but not limited to, light detection andranging (LIDAR) sensors, cameras, radars, ultrasonic sen-sors, contact sensors, and global positioning system (GPS).*e function and ability of various sensing technologies canbe found somewhere else [44]. It should be noted that anyerrors in the perception of the status, location, and
movement of the other road users, traffic signals, and otherhazards may raise safety concerns for AVs.
Figure 2 summarizes the past and potential future AVtechnology evolution based on the specific sensing tech-nology applied to the vehicle systems, and the information isobtained from [43, 45–55]. At the end of the 20th century,proprioceptive sensors including wheel sensors, inertialsensors, and odometry are widely employed in-vehiclesystems for better vehicle dynamics stabilization to achievethe functions of traction control system, antilock brakingsystem, electronic stability control, antiskid control, andelectronic stability program. In the first decade of the 21stcentury, many efforts have been devoted to the information,warning, and comfort during the driving process with thehelp of exteroceptive sensors such as sonar, radar, lidar,vision sensors, infrared sensors, and global navigation sat-ellite system.*e vehicles enable the functions of navigation,parking assistance, adaptive cruise control, lane departurewarning, and night vision [56]. In the past decade, sensornetworks installed in both vehicle and road systems havebeen adopted in the modern transportation system for thepurpose of automated and cooperative driving [46]. Ad-vanced autonomous functions will be enabled, includingcollision avoidance and mitigation, and automated drivingsuch that the drivers will be eventually released from thedriving process. Depending on the level of vehicle auto-mation, the perceived data may also come from the com-munication between the AVs and the correspondinginfrastructure [57, 58], other vehicles [44, 59], the Internet[60], and cloud [60].
Hardware, software, and communication are the threemajor sources of perception errors. *e perception systemheavily relies on sensing technology; therefore, the per-ception errors may come from the hardware includingsensors. For example, the degradation and failure of thesensors may cause server perception errors, confuse thedecision system, and lead to dangerous driving behaviors.*erefore, reliable and fault-tolerant sensing technologywill be a potential solution to such issues. In addition, theperception errors may also result from the malfunction ofthe software, and this type of error would cause mis-leading to the decision and action layers, which may eitherfail the mission tasks or cause safety problems [57].Communication errors will become important when theAVs are approaching fully automation levels. *e com-munication errors may come from errors resulted fromthe communication between the AVs and the corre-sponding infrastructure [57], other road users [44], andthe Internet [60]. Interpersonal communication is a vitalcomponent of the modern transportation system [61].Road users, including drivers, pedestrians, bicyclists, andconstruction workers communicate with each other tocoordinate movements and ensure road safety, which arethe basic requirements of AVs [62]. *e communicationmethods include gestures, facial expressions, and vehic-ular devices, and the comprehension of these messagescan be affected by a variety of factors including culture,context, and experience, and these factors are also the keychallenges for AV technology [61].
4 Journal of Advanced Transportation

3.1.2. Decision Error. *e decision layer interprets all pro-cessed data from the perception layer, makes decisions, andgenerates the information required by the action layer[41, 63]. Situational awareness serves as the input of thedecision-making system for short-term and long-termplanning. *e short-term involves trajectory generation,obstacle avoidance, and event and maneuver manager, whilelong-term planning involves mission planning and routeplanning [57, 64–66].
*e decision errors mainly come from the system orhuman factors. An efficient AV system will only take overthe driving or warn the drivers when necessary, with aminimized false alarm rate but acceptable positive perfor-mance (e.g., safety level) [67]. As the AV technology isimproved over time, the false alarm rate can be reducedsignificantly with sufficient accuracy and meet the re-quirements of the safety requirements [68]. However, if thealgorithm is not able to detect all the hazards effectively andefficiently, the safety of AVs will be threatened. It should be
pointed out that it may take a few seconds for the driversoccupied by secondary tasks to respond and take over thecontrol from the automated vehicle [69–71], which bringuncertainties to the safe AV control.
Unfortunately, AV technology is not yet completelyreliable; therefore, the human driver has to take over thedriving process, supervising, and monitoring the drivingtasks when AV system fails or is limited by performancecapability [69, 72]. In turn, the shifting role of a humandriver in AV driving may lead to inattention, reduced sit-uational awareness, and manual skill degradation [73].*erefore, how to safely and effectively re-engage the driverwhen the autonomous systems fail should be considered indesigning the AVs from a human-centered perspective.
3.1.3. Action Error. After receiving the command from thedecision layer, the action controller will further control thesteering wheel, throttle, or brake for a traditional engine to
Past Today
SAEautomation
levels
Functions
Sensingtechnology
Goals Vehicle dynamicsstabilization
Information, warning, andcomfort Automated and cooperative driving
Odometry
Inertial sensorsLidar Vision sensors
Radar Infraredsensors
Electronicstabilitycontrol Navigation Lane departure
warning
Night vision
Parkassistance
Adaptivecruise control
Low-speed automated driving
Collisionavoidance
Automatedhighway driving
Door-to-doorautomated driving
Collisionmitigation Eco-maneuvering Cooperative
maneuvering
Multisensorplatform
Traffic sensornetwork
Driver assitance Partial automation Conditional automation High/full automation
Distributed sensors
Connected vehicles
Mobile eye
Tractioncontrol system
Antilockbrakingsystem
Global navigation satellitesystem
Antiskidcontrol
Electronicstabilityprogram
Ultrasonic/sonar
Future
Figure 2: Past and potential future evolution of autonomous vehicle technology.
Decision layer
Sensor 1
Preset data 1
Perception layer
Sensor 2
...
Actuator 1
Actuator 2
...
Preset data 2
...
Situational assessment
Motionplanner
acceleration,steering,etc.
Long-termplanner
Action layer
Action supervisor
Action generator
Realtraffic
environment
Simulatedtraffic
environment
Data fusion
Detector, tractor,localizer, etc.
Short-termplanner
Missionplannerlocation,
navigation,etc.
�rottle, brake, steering,parking, etc.
Figure 1: A typical autonomous vehicle system architecture.
Journal of Advanced Transportation 5

change the direction and accelerate or decelerate [74, 75]. Inaddition, the actuators also monitor the feedback variablesand the feedback information will be used to generate newactuation decisions.
Similar to traditional driving systems, action errors dueto the failure of the actuators or the malfunction of thepowertrain, controlling system, heat management system, orexhaust system may rise to safety problems. However, ahuman driver would be able to identify this type of safetyissues during the driving and pull over within a short re-sponse time. How the vehicle learns in these scenarios andresponds to these low-frequency but fatal malfunctions ofmajor vehicular components would be challenging to the fullautomation driving system. *erefore, the accident recon-struction of traditional vehicles would also be important[76].
3.2. Accidents Caused byOther RoadUsers. According to theaccidents related to AVs reported by State of CaliforniaDepartment of Motor Vehicles [2, 77], the majority of theaccidents related to the AVs are caused by the other partieson a public road. For example, vehicles, bicyclists, and angryor drunk pedestrians who share the same road with the AVsmay behave abnormally, which is even difficult for a humandriver to handle.
It will be urgent to investigate what the advanced AVswill react with these hazardous scenarios, and it would not besurprising that this technology will dramatically reduce thefatal accidents on roads. However, the autonomous tech-nology is still not mature enough to handle very complicatedscenarios before some key issues could be solved, includingthe effective detection and prediction of hazardous behaviorscaused by other road users, and the correct decision made bythe autonomous system. *e effective detection of hazardscaused by the other road users is crucial for the AVs to makeactive decisions to avoid oncoming accidents. *e AVsshould decide if they need to take actions that may violatetraffic regulations to avoid potential fatal or injuriousaccidents.
4. On-Road Testing and Reported Accidents
In this section, publicly available data for on-road AV testingincluding disengagement and accident reports have beenanalyzed for a direct understanding of the safety status ofAVs. Two typical data sources from the California De-partment of Motor Vehicles (USA) and Beijing InnovationCenter for Mobility Intelligent (China) are investigated inthis section.
4.1. California Department of Motor Vehicles. Safety risksexposed during on-road testing, represented by disen-gagements and actual accidents, are reported by the State ofCalifornia Department of Motor Vehicles [78, 79]. *issection reviews the disengagement and accident reported bythe State of California Department of Motor Vehicles as ofApril 2019, and 621 disengagement reports between 2014and 2018 have been statistically analyzed.
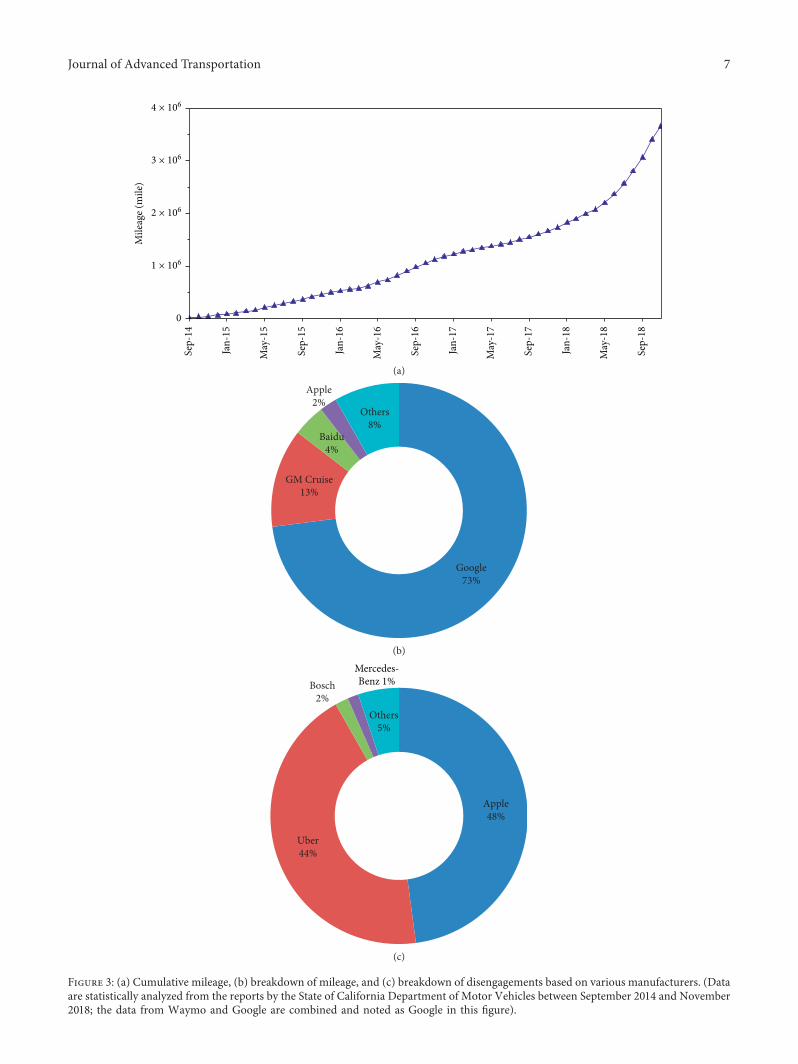
Figure 3 shows the statistical status of the on-road AVtesting in California reported by the Department of MotorVehicles, in terms of cumulative mileage and breakdown ofmileage and disengagements. *e disengagements during anAV on-road test do not necessarily yield to traffic accidents,but they represent risk events that require the human op-erator to be alert and take over the automated vehicles[77, 78]. *e 621 disengagement reports indicated that thetotal mileage of the AVs tested in California has reached 3.7million miles (see Figure 3(a)), among which Google con-tributed 73% of the total autonomous driving mileage,followed by GM Cruise (13%), Baidu (4%), Apple (2%), andother manufacturers (8%) as shown Figure 3(b). In total159,870 disengagement events have been reported, and thetop four manufacturers are Apple (48%), Uber (44%), Bosch(2%), and Mercedes-Benz (1%). *e disengagement eventswere categorized into two primary modes by Apple: manualtakeovers and software disengagements [77]. Manualtakeovers were recorded when the AV operators make thedecisions to manually control the vehicles instead of auto-mated systems when they deem necessary. *ese events canbe caused by complicated actual driving conditions, in-cluding but not limited to emergency vehicles, constructionzone, or unexpected objects around the roads. Softwaredisengagements can be caused by the detection of an issuewith perception, motion planning, controls, and commu-nications. For example, if the sensors cannot sufficientlypercept and track an object in the surrounding environ-ments, human drivers will take over the driving process. *efailure of generating a motion plan by the decision layer andthe late or inappropriate response of the actuator will resultin a disengagement event.
However, it should be noted that different manufacturersmay have a different understanding of the disengagementevents, whichmeans the reported disengagement events maybe incomplete for some companies. Figure 4 presents therelation between disengagements per mile and total miles fordifferent manufacturers. It can be seen that the manualtakeover frequency varies significantly from 2×10−4 to 3disengagements per mile for different manufacturers. *esignificant difference may primarily result from the maturityof the autonomous technology; however, the definition ofdisengagements at this early stage of the on-road testing mayalso contribute to the difference in disengagement fre-quency. Policymakers may play a vital role in the widelyaccepted definition of disengagement events, consideringperception errors, decision errors, action errors, systemfault, and other issues.
Figure 5 indicates the breakdown of the actual AV ac-cident reports in California between 2014 and 2018 from theDepartment of Motor Vehicles. 128 accident reports arestatistically analyzed, and the top four reporters are GMCruise (46%), Waymo (22%), Google (17%), and Zoox (5%).It should be noted that Waymo originated from the GoogleSelf-Driving Car Project in 2009 [80]. Among these 128accident reports in the past four years, 36.7% of the accidentsoccur during the conventional manual-control mode, whilethe remaining 63.3% are found in autonomous drivingmode. *is indicates that the autonomous technology still
6 Journal of Advanced Transportation
Sep-
14
Jan-
15
May
-15
May
-16
May
-17
May
-18
Sep-
15
Sep-
16
Sep-
17
Sep-
18
Jan-
16
Jan-
17
Jan-
18
0
1 × 106
3 × 106
2 × 106
4 × 106
Mile
age (
mile
)
(a)
Google73%
GM Cruise13%
Baidu4%
Apple2%
Others8%
(b)
Apple48%
Uber44%
Bosch2%
Others5%
Mercedes-Benz 1%
(c)
Figure 3: (a) Cumulative mileage, (b) breakdown of mileage, and (c) breakdown of disengagements based on various manufacturers. (Dataare statistically analyzed from the reports by the State of California Department of Motor Vehicles between September 2014 and November2018; the data from Waymo and Google are combined and noted as Google in this figure).
Journal of Advanced Transportation 7

requires more intensive on-road testing before it can becompletely applied to the AVs. It is also interesting to findthat only a small portion (around 6.3%) of the total accidentsis caused by the AVs, while 93.7% of the accidents are causedby the other parties, including pedestrians, cyclists, mo-torcycles, and conventional vehicles. *is indicates that afurther study on the potential operating strategy of the AVsto avoid passive accidents may dramatically improve AVsafety.
Figure 6 indicates the relation between reportable ac-cidents and the total mileage for the AVs tested in California.It can be seen before 2017 that the number of reportableaccidents increases with the total testing mileage slowly witha rate of 1.7×10−5 accidents per mile; however, from 2017 to2018, the increase rate becomes 4.9×10−5 accidents per mile,which is almost tripled.*is is likely due to the advanced but
immature technology applied to the recent tested AVs andthe increasing number of AVs being tested simultaneously inCalifornia.
4.2. Beijing Innovation Center for Mobility Intelligent. *eBeijing Innovation Center for Mobility Intelligent recentlyreported the on-road AV testing in restricted urban areas forthe year of 2018 [27]. Since March, the autonomous drivingmileage has reached 153,565 km (equivalent to 95,420 miles)at the end of December 2018 (see Figure 7(a)). *e top fourmanufacturers are Baidu (90.8%), Pony.ai (5.6%), NIO(2.8%), and Daimler AG (0.5%). However, no disengage-ment and accident reports are available yet. It would bemeaningful if the accident-related information can beavailable publicly, and the shared information could bebeneficial for all manufacturers to promote the applicationof automated technology in vehicles and build the cus-tomers’ confidence in AVs.
5. Opportunities and Challenges
AV technology will benefit from various perspectives byimproving transportation safety, reducing traffic congestion,releasing humans from the driving process, and impactingour community both economically and environmentally[81–84]. *erefore, advanced AV technology has gainedincreasing interests in both academia and industry, whichindicates a variety of opportunities for the development ofAVs. However, the AVs require extensive experimentalefforts before they can be promoted in markets, and newchallenges from the adopted software, hardware, vehiclesystem, infrastructure, and other road users have to beaddressed.
5.1. Opportunities. One argument for AV technology de-velopment is that many traditional job opportunities will beeliminated. However, as technology is developed, more jobs,in reality, will be created. *e AV development requiresextensive testing on software, hardware, vehicle compo-nents, vehicle system, sensing devices, communication
Toyo
ta
Honda
AutoX We Ride
PhantomAI
Tesla
aiPod
Qualcom
m
CarOne
Valeo
BMW
Merced
esMerc
edes
AFMoter
Nvidia
Volksw
agen
Drive.a
iUbe
r
Apple
PlusAi
Delphi
Aurora
Zoox
GM C
ruise
Waymo
SAIC
TuSim
pleFo
rd
Telen
avBos
chNullm
ax
Ponya
iAim
otive
Roadst
arai
Nissan
Ponya
iNuro Baid
u
10–4
10–2
100
102
Dise
ngag
emen
ts (m
ile)
102 103 104 105 106 107101
Miles
Figure 4: Number of disengagements vs. autonomous miles according to reported data from various manufacturers.
GM Cruise46%
Waymo22%
Google17%
Zoox5%
UATC2%
Aurora 2%
Apple2%
Others4%
Figure 5: Breakdown of autonomous vehicle accident reports.(Data are statistically analyzed from the reports by the State ofCalifornia Department of Motor Vehicles between September 2014and November 2018).
8 Journal of Advanced Transportation

systems, and other multidisciplinary fields. With the AVtechnology, human operators can be released from thedriving process, and time can be better managed. People willwork, play, and study more efficiently due to the promotionof AV technology. In addition, the current lifestyle would bealtered. For instance, the ways of driving training anddriver’s license test would be changed. In other words, notonly the AV-related field but also the non-AV industry canbe promoted.
AV techniques can also change the traditional way oftransportation. *e demands of releasing vehicle operatorsfrom driving have driven the development of intelligentvehicle grid with the help of a platform of sensors to collectinformation from the surrounding environment includingother road users and road signs. *ese signals will beprovided to the drivers and infrastructures to enable safe
navigation, to reduce emission, to improve fuel economy,and to manage traffic efficiently. Stern et al. carried out aring road experiment involving both autonomous andhuman-operated vehicles, and their results indicate that asingle AV can be used to control the traffic flow of at least 20human-operated vehicles with significant improvements invehicle velocity standard deviation, excessive braking, andfuel economy [85]. Liu and Song investigated two types oflanes designed for AVs: dedicated AV lane and AV/toll lane[86]. *e dedicated AV lane only allows AVs to pass, whileAV/toll lane permits human-operated vehicles to pass bypaying extra fees, and their modeling results indicate thatthe system performance can be improved by utilizing bothof the two methods [86]. Gerla et al. reviewed the Internetof Vehicles capable of communications, storage, intelli-gence, and self-learning [60]. *eir work indicated that the
8.0 × 105
6.0 × 105
4.0 × 105
2.0 × 105
0.0Mar Jun Sep Dec
Month of the year 2018
Mile
age (
km)
(a)
Daimler AG0.5%
Others0.3%
Pony.ai5.6%
NIO2.8%
Baidu90.8%
(b)
Figure 7: (a) Cumulative mileage and (b) breakdown of mileage contribution due to various manufacturers tested in Beijing in the year2018.
140
120
100
80
60
40
20
0
Num
ber o
f rep
orta
ble a
ccid
ents
0 1 × 106 2 × 106 3 × 106 4 × 106
Total mileage (mile)
2018
2017
2016
20152014
Figure 6: Relation between cumulative accidents and cumulative autonomous miles. (*e data shown in this figure are reported by themanufacturers as of April 2019.)
Journal of Advanced Transportation 9

communication between vehicles and the Internet willdramatically change the way of public transportation,making traditional transportation more efficient andcleaner. *erefore, traditional transportation systems haveto be modified for AVs.
Driving simulators have drawn significant attention toreproduce the automatic driving conditions and accidentscenarios in a virtual reality environment. Owing to thedriving simulators, the driving behaviors, take-over re-quest, car-following maneuver, and other human factorscan be efficiently studied [69–71, 87]. *is can minimize therisk putting drivers in dangerous environment and simu-late the decision-making process and the associatedconsequence.
5.2. Challenges. *e wide application of AVs still remainschallenging due to safety issues. *e AVs will be promoted ifthe following challenges can be further addressed:
5.2.1. Minimizing Perception Errors. To effectively detect,localize, and categorize the objects in the surrounding en-vironment will be challenging to minimize perception er-rors. In addition, the perception and comprehension ofhuman behaviors including posture, voice, and motion willbe important for AV safety.
5.2.2. Minimizing Decision Errors. To correctly and timelyrespond to the ambient environment, a reliable, robust, andefficient decision-making system should be developed. *isshould be achieved through extensive and strict hardwareand software testing. In addition, how to make correctdecisions under complicated scenarios is still difficult, e.g.,what should be the decision if the AVs will have to hurtpedestrians to avoid fatal accidents due to sudden systemfaults or mechanical failures.
5.2.3. Minimizing Action Errors. To achieve safe AVs, ac-tuators should be able to communicate with the decisionsystems and execute the commands either from humanoperators or automated systems with high reliability andstability.
5.2.4. Cyber-Security. As the autonomous technology de-velops, the AVs will have to wirelessly communicate withroad facilities, satellites, and other vehicles (e.g., vehicularcloud). How to make sure the cyber-security will be one ofthe biggest concerns for AVs [88].
5.2.5. Interaction with Traditional Transportation System.*e AVs and traditional vehicles will share the public roadsin urban areas, and the interaction between AVs and otherroad users including traditional vehicles and pedestrians willbe challenging [89]. For the other road users, it is difficult toidentify the types of vehicles that they are interacting with.For pedestrians, this uncertainty may lead to stress andaltered crossing decisions, especially when the AV driver is
occupied by other tasks and does not make eye contact withother pedestrians [56]. Rodrıguez Palmeiro et al.’s worksuggested that fine-grained behavioral measures, such aseye-tracking, can be further investigated to determine howpedestrians react to AVs [4].
5.2.6. Customer Acceptance. *e major factors limiting thecommercialization of AVs include safety [90], cost [17, 91],and public interests [92–97], among which safety is the mostparamount issues that can significantly affect the publicattitude towards the emerging AV technology.
6. Summary and Concluding Remarks
Fully autonomous vehicles (AVs) will allow the vehicles tobe operated entirely by automated systems, facilitating theengagements of the human operators into tasks other thandriving. AV technology will benefit both individuals andcommunity; however, safety concern remains the technicalchallenges to the successful commercialization of AVs. Inthis review article, the levels of automation defined bydifferent organizations in different fields are summarizedand compared. *e definitions of automation levels by theSociety of Automotive Engineer (SAE) are widely adopted byautomotive engineering for AVs. A theoretical analysis ofthe types of existing and potential types of accidents for AVsis conducted based on typical AV architectures, includingperception, decision, and action systems. In addition, theon-road AV disengagement and accident reports availablepublicly are statistically analyzed.*e on-road testing resultsin California indicate that more than 3.7 million miles havebeen tested for AVs by various manufacturers between 2014and 2018. *e AVs are frequently manually taken over byhuman operators, and the disengagement frequency variessignificantly from 2×10−4 to 3 disengagements per milebased on different manufacturers. In addition, 128 accidentsare reported over 3.7 million miles, and approximately63.3% of the total accidents occur when driving in auton-omous mode. A small portion (around 6.3%) of the totalaccidents is directly related to the AVs, while 93.7% of theaccidents are passively initiated by the other parties, in-cluding pedestrians, cyclists, motorcycles, and conventionalvehicles. *ese safety risks exposed during on-road testing,represented by disengagements and actual accidents, indi-cate that the passive accidents which are caused by otherroad users are the majority. *is implies that alerting andavoiding safety risks caused by the other parties will be ofgreat significance to make safe decisions to prevent fatalaccidents.
Data Availability
*e data used to support the findings of this study are in-cluded within the article.
Conflicts of Interest
*e authors declare that they have no conflicts of interest.
10 Journal of Advanced Transportation

References
[1] J. M. Anderson, N. Kalra, K. D. Stanley, P. Sorensen,C. Samaras, and O. A. Oluwatola, Autonomous VehicleTechnology: A Guide for Policymakers, RAND Corporation,Santa Monica, CA, USA, 2016.
[2] F. M. Favaro, N. Nader, S. O. Eurich, M. Tripp, andN. Varadaraju, “Examining accident reports involving au-tonomous vehicles in California,” PLoS One, vol. 12, 2017.
[3] A. Millard-Ball, “Pedestrians, Autonomous vehicles, andcities,” Journal of Planning Education and Research, vol. 38,no. 1, pp. 6–12, 2018.
[4] A. Rodrıguez Palmeiro, S. van der Kint, L. Vissers, H. Farah,J. C. F. de Winter, and M. Hagenzieker, “Interaction betweenpedestrians and automated vehicles: a Wizard of Oz exper-iment,” Transportation Research Part F: Traffic Psychology andBehaviour, vol. 58, pp. 1005–1020, 2018.
[5] L. C. Davis, “Optimal merging into a high-speed lane dedi-cated to connected autonomous vehicles,” Physica A: Statis-tical Mechanics and its Applications, vol. 555, Article ID124743, 2020.
[6] R. E. Stern, Y. Chen, M. Churchill et al., “Quantifying airquality benefits resulting from few autonomous vehiclesstabilizing traffic,” Transportation Research Part D: Transportand Environment, vol. 67, pp. 351–365, 2019.
[7] US Department of Transportation National Highway TrafficSafety Administration, Critical Reasons for Crashes Investi-gated in the National Motor Vehicle Crash Causation Survey,NHTSA, Washington, DC, USA, 2015.
[8] V. Nagy and B. Horvath, “*e effects of autonomous buses tovehicle scheduling system,” Procedia Computer Science,vol. 170, pp. 235–240, 2020.
[9] M. W. Levin, M. Odell, S. Samarasena, and A. Schwartz, “Alinear program for optimal integration of shared autonomousvehicles with public transit,” Transportation Research Part C:Emerging Technologies, vol. 109, pp. 267–288, 2019.
[10] X. Ge, X. Li, and Y. Wang, “Methodologies for evaluating andoptimizing multimodal human-machine-interface of auton-omous vehicles,” in Proceedings of the SAE Technical PaperSeries, Detroit, MI, USA, 2018.
[11] L.-J. Tian, J.-B. Sheu, and H.-J. Huang, “*e morning com-mute problem with endogenous shared autonomous vehiclepenetration and parking space constraint,” TransportationResearch Part B: Methodological, vol. 123, pp. 258–278, 2019.
[12] Y.-C. Lee and J. H. Mirman, “Parents’ perspectives on usingautonomous vehicles to enhance children’s mobility,”Transportation Research Part C: Emerging Technologies,vol. 96, pp. 415–431, 2018.
[13] D. J. Fagnant and K. Kockelman, “Preparing a nation forautonomous vehicles: opportunities, barriers and policyrecommendations,” Transportation Research Part A: Policyand Practice, vol. 77, pp. 167–181, 2015.
[14] R. Bennett, R. Vijaygopal, and R. Kottasz, “Willingness ofpeople who are blind to accept autonomous vehicles: anempirical investigation,” Transportation Research Part F:Traffic Psychology and Behaviour, vol. 69, pp. 13–27, 2020.
[15] C. Włodzimierz and G. Iwona, “Autonomous vehicles inurban agglomerations,” Transportation Research Procedia,vol. 40, pp. 655–662, 2019.
[16] T. Z. Zhang and T. D. Chen, “Smart charging management forshared autonomous electric vehicle fleets: a puget sound casestudy,” Transportation Research Part D: Transport and En-vironment, vol. 78, Article ID 102184, 2020.
[17] L. Zhang, F. Chen, X. Ma, and X. Pan, “Fuel economy in truckplatooning: a literature overview and directions for futureresearch,” Journal of Advanced Transportation, vol. 2020,Article ID 2604012, 10 pages, 2020.
[18] J. Farhan and T. D. Chen, “Impact of ridesharing on oper-ational efficiency of shared autonomous electric vehicle fleet,”Transportation Research Part C: Emerging Technologies,vol. 93, pp. 310–321, 2018.
[19] M. Lokhandwala and H. Cai, “Siting charging stations forelectric vehicle adoption in shared autonomous fleets,”Transportation Research Part D: Transport and Environment,vol. 80, Article ID 102231, 2020.
[20] I. Overtoom, G. Correia, Y. Huang, and A. Verbraeck,“Assessing the impacts of shared autonomous vehicles oncongestion and curb use: a traffic simulation study in theHague, Netherlands,” International Journal of TransportationScience and Technology, 2020.
[21] P. Koopman and M. Wagner, “Autonomous vehicle safety: aninterdisciplinary challenge,” IEEE Intelligent TransportationSystems Magazine, vol. 9, pp. 90–96, 2017.
[22] C. Xu, Z. Ding, C. Wang, and Z. Li, “Statistical analysis of thepatterns and characteristics of connected and autonomousvehicle involved crashes,” Journal of Safety Research, vol. 71,pp. 41–47, 2019.
[23] B. Nemeth, Z. Bede, and P. Gaspar, “Control strategy for theoptimization of mixed traffic flow with autonomous vehicles,”IFAC-PapersOnLine, vol. 52, no. 8, pp. 227–232, 2019.
[24] D. Phan, A. Bab-Hadiashar, C. Y. Lai et al., “Intelligent energymanagement system for conventional autonomous vehicles,”Energy, vol. 191, Article ID 116476, 2020.
[25] F. Chen, M. Song, and X. Ma, “A lateral control scheme ofautonomous vehicles considering pavement sustainability,”Journal of Cleaner Production, vol. 256, Article ID 120669,2020.
[26] F. Chen, M. Song, X. Ma, and X. Zhu, “Assess the impacts ofdifferent autonomous trucks’ lateral control modes on asphaltpavement performance,” Transportation Research Part C:Emerging Technologies, vol. 103, pp. 17–29, 2019.
[27] Beijing Innovation Center for Mobility Intelligent, BeijingAutonomous Vehicle Road Test Report, 2018, http://www.mzone.site/.
[28] K. Bimbraw, “Autonomous cars: past, present and future Areview of the developments in the last century, the presentscenario and the expected future of autonomous vehicletechnology,” in Proceedings of the 12th International Con-ference on Informatics in Control, Automation and Robotics,pp. 191–198, Colmar, France, July 2015.
[29] L. M. Hulse, H. Xie, and E. R. Galea, “Perceptions of au-tonomous vehicles: relationships with road users, risk, genderand age,” Safety Science, vol. 102, pp. 1–13, 2018.
[30] J. Moody, N. Bailey, and J. Zhao, “Public perceptions ofautonomous vehicle safety: an international comparison,”Safety Science, vol. 121, pp. 634–650, 2020.
[31] J. Lee, D. Lee, Y. Park, S. Lee, and T. Ha, “Autonomousvehicles can be shared, but a feeling of ownership is im-portant: examination of the influential factors for intention touse autonomous vehicles,” Transportation Research Part C:Emerging Technologies, vol. 107, pp. 411–422, 2019.
[32] G. Mordue, A. Yeung, and F. Wu, “*e looming challenges ofregulating high level autonomous vehicles,” TransportationResearch Part A: Policy and Practice, vol. 132, pp. 174–187,2020.
[33] T. B. Sheridan and W. L. Verplank, Human and ComputerControl of Undersea Teleoperators, Man-Machine Systems
Journal of Advanced Transportation 11

Laboratory, Department of Mechanical Engineering, Mas-sachusetts Institute of Technology, Cambridge, MA, USA,1987.
[34] R. Parasuraman, T. B. Sheridan, and C. D. Wickens, “A modelfor types and levels of human interaction with automation,”IEEE Transactions on Systems, Man, and Cybernetics-Part A:Systems and Humans, vol. 30, no. 3, pp. 286–297, 2000.
[35] M. Bonner, R. Taylor, K. Fletcher, and C. Miller, “Adaptiveautomation and decision aiding in the military fast jet do-main,” in Proceedings of the Conference on Human Perfor-mance, Situation Awareness and Automation: User CenteredDesign for the New Millenium, pp. 154–159, Savannah, GA,USA, October 2000.
[36] D. Richards, “To delegate or not to delegate: a review ofcontrol frameworks for autonomous cars,” Applied Ergo-nomics, vol. 53, pp. 383–388, 2016.
[37] SAE International, Surface Vehicle Recommended Practice (R)Taxonomy and Definitions for Terms Related to Driving Au-tomation Systems for On-Road Motor Vehicles, SAE Inter-national, Pittsburgh, PA, USA, 2018.
[38] D. Paddeu, I. Shergold, and G. Parkhurst, “*e social per-spective on policy towards local shared autonomous vehicleservices (LSAVS),” Transport Policy, pp. 1–11, 2020.
[39] M. Garavello, P. Goatin, T. Liard, and B. Piccoli, “A multiscalemodel for traffic regulation via autonomous vehicles,” Journalof Differential Equations, vol. 269, no. 7, pp. 6088–6124, 2020.
[40] United States Department of Transportation, AutomatedVehicles for Safety, United States Department of Trans-portation, Washington, DC, USA, 2019, https://www.nhtsa.gov/technology-innovation/automated-vehicles-safety#nhtsa-action.
[41] W. L. Huang, K. Wang, Y. Lv, and F. H. Zhu, “Autonomousvehicles testing methods review,” in Proceedings of the 2016IEEE 19th International Conference on Intelligent Trans-portation Systems (ITSC), pp. 163–168, Rio de Janeiro, Brazil,November 2016.
[42] P. Pisu, P. Sauras-Perez, A. Gil, J. Singh Gill, and J. Taiber,“VoGe: a voice and gesture system for interacting with au-tonomous cars,” in Proceedings of the SAE Technical PaperSeries, Detroit, MI, USA, 2017.
[43] C. Ilas, “Electronic sensing technologies for autonomousground vehicles: a review,” in 2013 8th International Sym-posium on Advanced Topics in Electrical Engineering (ATEE),pp. 1–6, Bucharest, Romania, May 2013.
[44] A. Sarmento, B. Garcia, L. Coriteac, and L. Navarenho, “*eautonomous vehicle challenges for emergent market,” inProceedings of the SAE Technical Paper Series, São Paulo,Brasil, 2017.
[45] K. Bengler, K. Dietmayer, B. Farber, M. Maurer, C. Stiller, andH. Winner, “*ree decades of driver assistance systems: re-view and future perspectives,” IEEE Intelligent TransportationSystems Magazine, vol. 6, pp. 6–22, 2014.
[46] U Ozguner, C. Stiller, and K. Redmill, “Systems for safety andautonomous behavior in cars: the DARPA grand challengeexperience,” Proceedings of the IEEE, vol. 95, pp. 397–412,2007.
[47] L. B. Cremean, T. B. Foote, J. H. Gillula et al., “Alice: aninformation-rich autonomous vehicle for high-speed desertnavigation,” Journal of Robotics, vol. 23, pp. 777–810, 2006.
[48] J. Choi, J. Lee, D. Kim et al., “Environment-Detection-and-Mapping algorithm for autonomous driving in rural or off-road environment,” IEEE Transactions on Intelligent Trans-portation Systems, vol. 13, pp. 974–982, 2012.
[49] D. Gohring, M. Wang, M. Schnurmacher, and T. Ganjineh,“Radar/Lidar sensor fusion for car-following on highways,” inProceedings of the 5th International Conference on Automa-tion, Robotics and Applications (ICARA), pp. 407–412, Wel-lington, New Zealand, December 2011.
[50] N. Suganuma and T. Uozumi, “Development of an autono-mous vehicle—system overview of test ride vehicle in theTokyo motor show,” in Proceedings of the 2012 IEEE/SICEInternational Symposium on System Integration (SII),pp. 215–218, Akita, Japan, 2012.
[51] C. Armbrust, T. Braun, T. Fohst et al., “RAVON-the robustautonomous vehicle for off-road navigation,” in Proceedingsof the IARP International Work Robotics Risky Interval En-vironment Surveillance, pp. 12–14, Brussel, Belgium, 2009.
[52] C. Urmson, C. Baker, J. Dolan et al., “Autonomous driving intraffic: boss and the urban challenge,” AI Magazine, vol. 30,pp. 17–28, 2009.
[53] T. Nimmagadda, Building an Autonomous Ground TrafficSystem, Technical Report HR-09-09, *e University of Texas,Austin, TX, USA, 2007.
[54] A. Petrovskaya and S. *run, “Model based vehicle detectionand tracking for autonomous urban driving,” AutonomousRobots, vol. 26, no. 2-3, pp. 123–139, 2009.
[55] J. Leonard, J. How, S. Teller et al., “A perception-drivenautonomous urban vehicle,” Journal of Robotics, vol. 25,pp. 727–774, 2008.
[56] A. Borowsky and T. Oron-Gilad, “*e effects of automationfailure and secondary task on drivers’ ability to mitigatehazards in highly or semi-automated vehicles,” Advances inTransportation Studies, vol. 1, pp. 59–70, 2016.
[57] D. Gonzalez, J. Perez, V. Milanes, and F. Nashashibi, “Areview of motion planning techniques for automated vehi-cles,” IEEE Transactions on Intelligent Transportation Systems,vol. 17, no. 4, pp. 1135–1145, 2016.
[58] H. Zhang, C. J. R. Sheppard, T. E. Lipman, T. Zeng, andS. J. Moura, “Charging infrastructure demands of shared-useautonomous electric vehicles in urban areas,” TransportationResearch Part D: Transport and Environment, vol. 78, ArticleID 102210, 2020.
[59] J. Yang, T. Chen, B. Payne, P. Guo, Y. Zhang, and J. Guo,“Generating routes for autonomous driving in vehicle-to-infrastructure communications,” Digital Communicationsand Networks, pp. 1–12, 2020.
[60] M. Gerla, E. K. Lee, G. Pau, and U. Lee, “Internet of vehicles:from intelligent grid to autonomous cars and vehicularclouds,” in Proceedings of the 2014 IEEEWorld Forum InternetDings, pp. 241–246, Seoul, South Korea, March 2014.
[61] S. C. Stanciu, D. W. Eby, L. J. Molnar, R. M. Louis, N. Zanier,and L. P. Kostyniuk, “Pedestrians/bicyclists and autonomousvehicles: how will they communicate?” Transportation Re-search Record: Journal of the Transportation Research Board,vol. 2672, pp. 58–66, 2018.
[62] K. Wang, G. Li, J. Chen et al., “*e adaptability and challengesof autonomous vehicles to pedestrians in urban China,”Accident Analysis & Prevention, vol. 145, Article ID 105692,2020.
[63] T. Ha, S. Kim, D. Seo, and S. Lee, “Effects of explanation typesand perceived risk on trust in autonomous vehicles,”Transportation Research Part F: Traffic Psychology and Be-haviour, vol. 73, pp. 271–280, 2020.
[64] S. Yu, J. Puchinger, and S. Sun, “Two-echelon urban deliveriesusing autonomous vehicles,” Transportation Research Part E:Logistics and Transportation, vol. 141, Article ID 102018, 2020.
12 Journal of Advanced Transportation

[65] Y. Liu and A. B. Whinston, “Efficient real-time routing forautonomous vehicles through Bayes correlated equilibrium:an information design framework,” Information Economicsand Policy, vol. 47, pp. 14–26, 2019.
[66] C. Ryan, F. Murphy, and M. Mullins, “Spatial risk modellingof behavioural hotspots: risk-aware path planning for au-tonomous vehicles,” Transportation Research Part A: Policyand Practice, vol. 134, pp. 152–163, 2020.
[67] O. T. Ritchie, D. G. Watson, N. Griffiths et al., “How shouldautonomous vehicles overtake other drivers?” TransportationResearch Part F: Traffic Psychology and Behaviour, vol. 66,pp. 406–418, 2019.
[68] J. D. Rupp and A. G. King, “Autonomous driving-a practicalroadmap,” in Proceedings of the SAE Technical Paper Series,Detroit, MI, USA, 2010.
[69] A. Eriksson and N. A. Stanton, “Takeover time in highlyautomated vehicles: noncritical transitions to and frommanual control,” Human Factors, vol. 59, pp. 689–705, 2017.
[70] A. Eriksson and N. A. Stanton, “Driving Performance afterself-regulated control transitions in highly automated vehi-cles,” Human Factors, vol. 59, pp. 1233–1248, 2017.
[71] A. Calvi, F. D’Amico, C. Ferrante, and L. Bianchini Ciampoli,“A driving simulator study to assess driver performanceduring a car-following maneuver after switching from au-tomated control to manual control,” Transportation ResearchPart F: Traffic Psychology and Behaviour, vol. 70, pp. 58–67,2020.
[72] L. J. Molnar, L. H. Ryan, A. K. Pradhan et al., “Understandingtrust and acceptance of automated vehicles: an exploratorysimulator study of transfer of control between automated andmanual driving,” Transportation Research Part F: TrafficPsychology and Behaviour, vol. 58, pp. 319–328, 2018.
[73] Cunningham, Mitchell, and M. A. Regan, “Autonomousvehicles: human factors issues and future research,” in Pro-ceedings of the 2015 Australasian Road Safety Research, Po-licing and Education (ARSRPE) Conference, Gold Coast,Australia, 2015.
[74] D. Fenyes, B. Nemeth, and P. Gaspar, “A predictive control forautonomous vehicles using big data analysis,” IFAC-Paper-sOnLine, vol. 52, pp. 191–196, 2019.
[75] S. Lee, Y. Kim, H. Kahng et al., “Intelligent traffic control forautonomous vehicle systems based on machine learning,”Expert Systems with Applications, vol. 144, Article ID 113074,2020.
[76] Q. Chen, M. Lin, B. Dai, and J. Chen, “Typical pedestrianaccident scenarios in China and crash severity mitigation byautonomous emergency braking systems,” , 2015.
[77] State of California Department of Motor Vehicles, Testing ofAutonomous Vehicles with a Driver, https://www.dmv.ca.gov/portal/dmv/detail/vr/autonomous/testing, 2019.
[78] V. V. Dixit, S. Chand, and D. J. Nair, “Autonomous vehicles:disengagements, accidents and reaction times,” PLoS One,vol. 11, pp. 1–14, 2016.
[79] C. Lv, D. Cao, Y. Zhao et al., “Analysis of autopilot disen-gagements occurring during autonomous vehicle testing,”IEEE/CAA Journal of Automatica Sinica, vol. 5, pp. 58–68,2018.
[80] Waymo, Waymo, 2019, https://waymo.com/.[81] S. Imhof, J. Frolicher, and W. v. Arx, “Research in trans-
portation economics shared autonomous vehicles in ruralpublic transportation systems,” Research in TransportationEconomics, pp. 1–7, 2020.
[82] F. Liu, F. Zhao, Z. Liu, and H. Hao, “Can autonomous vehiclereduce greenhouse gas emissions? A country-level evalua-tion,” Energy Policy, vol. 132, pp. 462–473, 2019.
[83] S. Rafael, L. P. Correia, D. Lopes et al., “Autonomous vehiclesopportunities for cities air quality,” Science of the Total En-vironment, vol. 712, Article ID 136546, 2020.
[84] M. A. Figliozzi, “Carbon emissions reductions in last mile andgrocery deliveries utilizing air and ground autonomous ve-hicles,” Transportation Research Part D: Transport and En-vironment, vol. 85, Article ID 102443, 2020.
[85] R. E. Stern, S. Cui, M. L. Delle Monache et al., “Dissipation ofstop-and-go waves via control of autonomous vehicles: fieldexperiments,” Transportation Research Part C: EmergingTechnologies, vol. 89, pp. 205–221, 2018.
[86] Z. Liu and Z. Song, “Strategic planning of dedicated auton-omous vehicle lanes and autonomous vehicle/toll lanes intransportation networks,” Transportation Research Part C:Emerging Technologies, vol. 106, pp. 381–403, 2019.
[87] A. Calvi, F. D’Amico, L. B. Ciampoli, and C. Ferrante,“Evaluation of driving performance after a transition fromautomated to manual control: a driving simulator study,”Transportation Research Procedia, vol. 45, pp. 755–762, 2020.
[88] I. Rasheed, F. Hu, and L. Zhang, “Deep reinforcementlearning approach for autonomous vehicle systems formaintaining security and safety using LSTM-GAN,” Vehic-ular Communications, vol. 26, Article ID 100266, 2020.
[89] D. Petrovic, R. Mijailovic, and D. Pesic, “Traffic accidents withautonomous vehicles: type of collisions, manoeuvres anderrors of conventional vehicles’ drivers,” Transportation Re-search Procedia, vol. 45, pp. 161–168, 2020.
[90] C. Wei, R. Romano, N. Merat et al., “Risk-based autonomousvehicle motion control with considering human driver’sbehaviour,” Transportation Research Part C: Emerging Tech-nologies, vol. 107, pp. 1–14, 2019.
[91] S. Chen, H. Wang, and Q. Meng, “Designing autonomousvehicle incentive program with uncertain vehicle purchaseprice,” Transportation Research Part C: Emerging Technolo-gies, vol. 103, pp. 226–245, 2019.
[92] F. Nazari, M. Noruzoliaee, and A. Mohammadian, “Sharedversus private mobility: modeling public interest in autono-mous vehicles accounting for latent attitudes,” TransportationResearch Part C: Emerging Technologies, vol. 97, pp. 456–477,2018.
[93] C. J. Haboucha, R. Ishaq, and Y. Shiftan, “User preferencesregarding autonomous vehicles,” Transportation ResearchPart C: Emerging Technologies, vol. 78, pp. 37–49, 2017.
[94] K. F. Yuen, Y. D. Wong, F. Ma, and X. Wang, “*e deter-minants of public acceptance of autonomous vehicles: aninnovation diffusion perspective,” Journal of Cleaner Pro-duction, vol. 270, p. 121904, 2020.
[95] H. Zhong, W. Li, M.W. Burris, A. Talebpour, and K. C. Sinha,“Will autonomous vehicles change auto commuters’ value oftravel time?” Transportation Research Part D: Transport andEnvironment, vol. 83, Article ID 102303, 2020.
[96] K. Hilgarter and P. Granig, “Public perception of autonomousvehicles: a qualitative study based on interviews after riding anautonomous shuttle,” Transportation Research Part F: TrafficPsychology and Behaviour, vol. 72, pp. 226–243, 2020.
[97] S. Wang, Z. Jiang, R. B. Noland, and A. S. Mondschein,“Attitudes towards privately-owned and shared autonomousvehicles,” Transportation Research Part F: Traffic Psychologyand Behaviour, vol. 72, pp. 297–306, 2020.
Journal of Advanced Transportation 13