robots that work in collaboration with people guy hoffman and cynthia breazeal robotic life group...
Post on 20-Dec-2015
214 views
TRANSCRIPT
Robots that Work in Collaboration with PeopleRobots that Work in Collaboration with People
Guy Hoffman and Cynthia Breazeal
Robotic Life GroupMIT Media Laboratory
Cambridge, MA, U.S.A
Robots learning from us and working with us
Robots learning from us and working with us
To be intuitive, efficient and enjoyable
these robots must understand and exhibit social skills
To be intuitive, efficient and enjoyable
these robots must understand and exhibit social skills
The goal: working shoulder-to-shoulder with a robot
The goal: working shoulder-to-shoulder with a robot

Most HRI work:robots as toolsMost HRI work:robots as tools
Joint Intention TheoryJoint Intention Theory
• Collaborative Plans Joint Intention
Grosz (1996), Searle (1990)
• Shared Cooperative Activity, Teamwork
Bratman (1992), Cohen & Levesque (1991)
Shared Cooperative ActivityShared Cooperative Activity
• Meshing Subplans
• Responsiveness
• Commitment
• Support
• Communication
Goals and CollaborationGoals and Collaboration
Leonardo DemoLeonardo Demo
So what will it take to collaborate with a robot?
So what will it take to collaborate with a robot?
Q & AQ & A
Additional SlidesAdditional Slides
Recent Related Work in HRIRecent Related Work in HRI
• Robonaut (2003)Collaboration with Teleoperated Robots
• Perzanowsky et al. (2001)Natural, Multi-modal Interface for Robot Control
• Fong et al. (2001)“Collaborative Control” - Using Humans as Source of Information
• Kimura et al. (1999)Vision-Based Teamwork for a Robotic Arm, Without Social Cues
• Traum et al. (2003)Virtual Teams Within a Command Structure
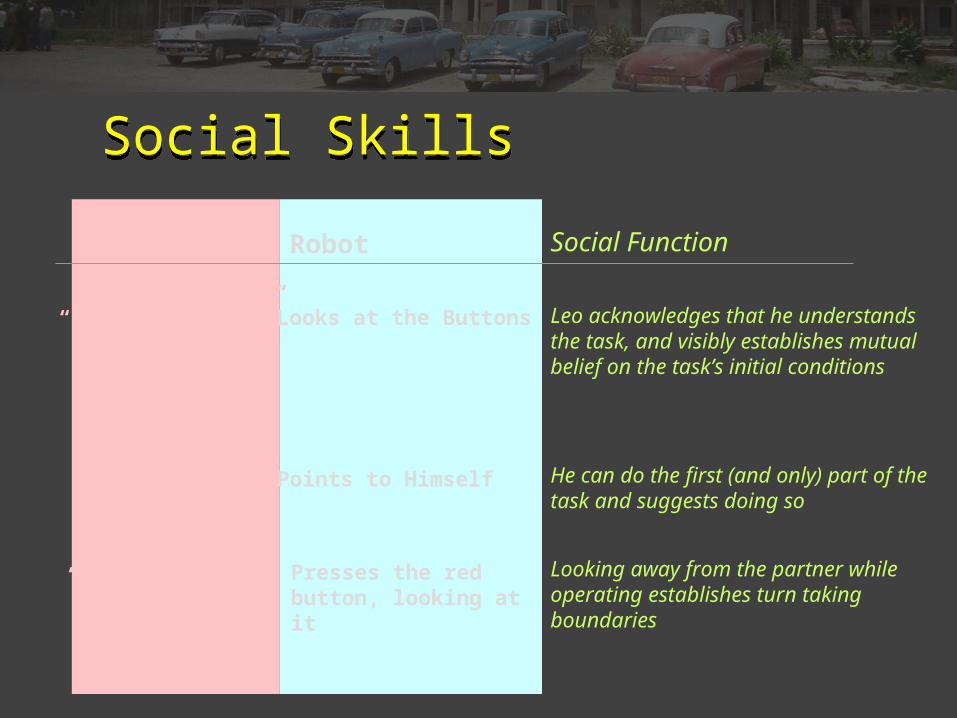
Social SkillsSocial Skills
Human Robot Social Function
“Let’s do task 5” Looks at the Buttons Leo acknowledges that he understands the task, and visibly establishes mutual belief on the task’s initial conditions
Points to Himself He can do the first (and only) part of the task and suggests doing so
“OK, you go!” Presses the red button, looking at it
Looking away from the partner while operating establishes turn taking boundaries
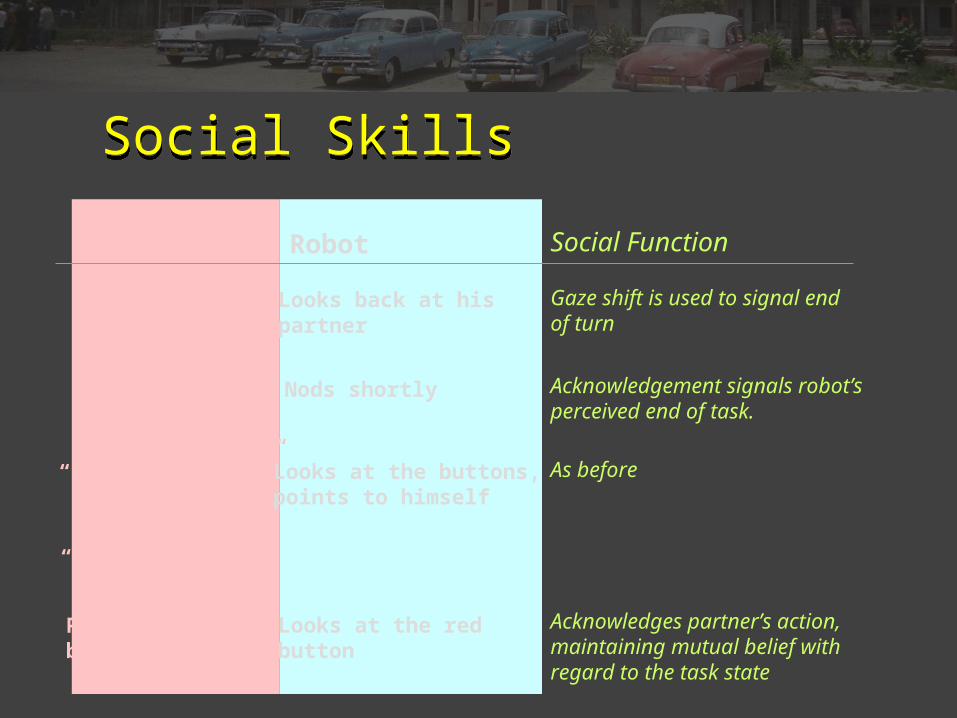
Social SkillsSocial Skills
Human Robot Social Function
Looks back at hispartner
Gaze shift is used to signal endof turn
Nods shortly Acknowledgement signals robot’sperceived end of task.
“I’ll go”
“Let’s do task 5” Looks at the buttons,points to himself
As before
Presses the redbutton
Looks at the redbutton
Acknowledges partner’s action,maintaining mutual belief withregard to the task state
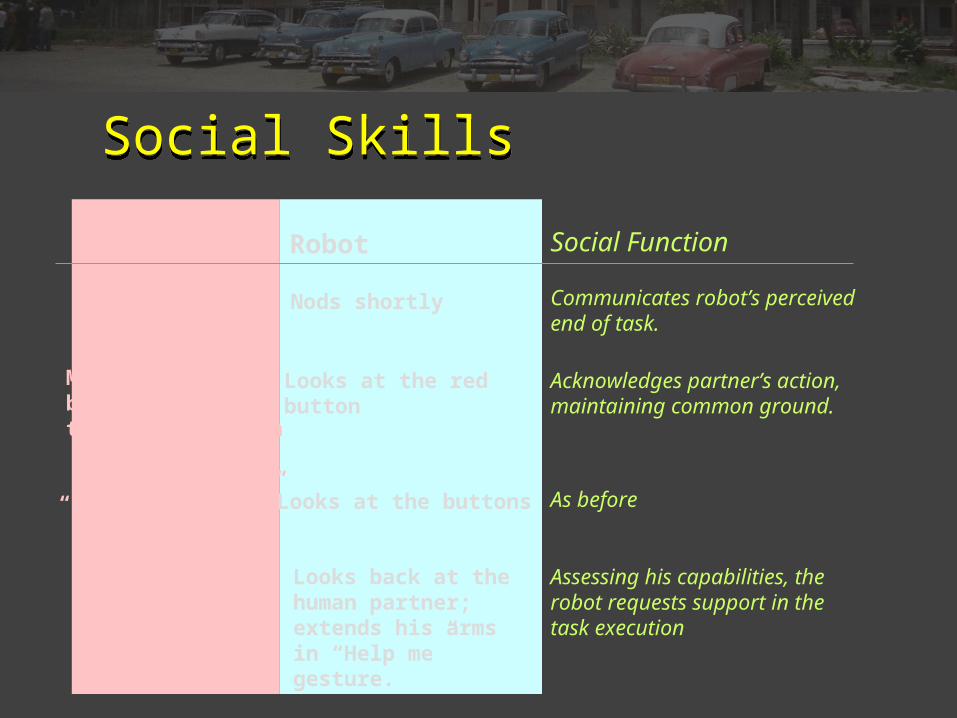
Social SkillsSocial Skills
Human Robot Social Function
Nods shortly Communicates robot’s perceivedend of task.
“Let’s do task 5” Looks at the buttons As before
Assessing his capabilities, therobot requests support in thetask execution
Moves the red button out of the robot’s reach
Looks at the redbutton
Acknowledges partner’s action,maintaining common ground.
Looks back at the human partner; extends his arms in “Help me” gesture.
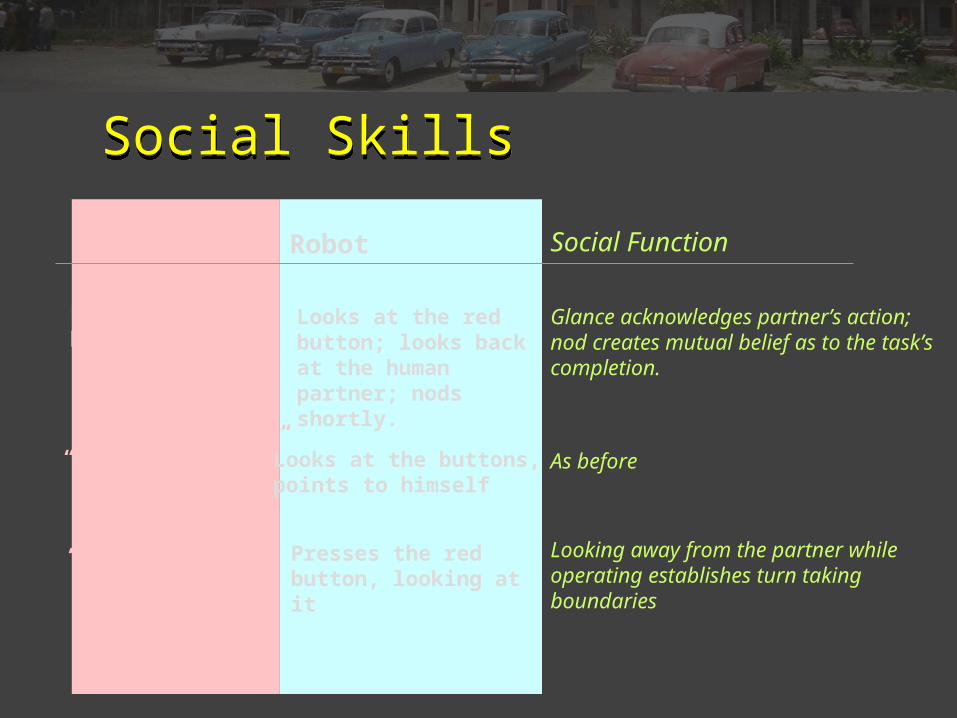
Social SkillsSocial Skills
Human Robot Social Function
“Let’s do task 1” Looks at the buttons,points to himself
As before
Presses the redbutton
Looks at the redbutton; looks back at the human partner; nods shortly.
Glance acknowledges partner’s action; nod creates mutual belief as to the task’s completion.
“OK, you go!” Presses the red button, looking at it
Looking away from the partner while operating establishes turn taking boundaries
Social SkillsSocial Skills
Human Robot Social Function
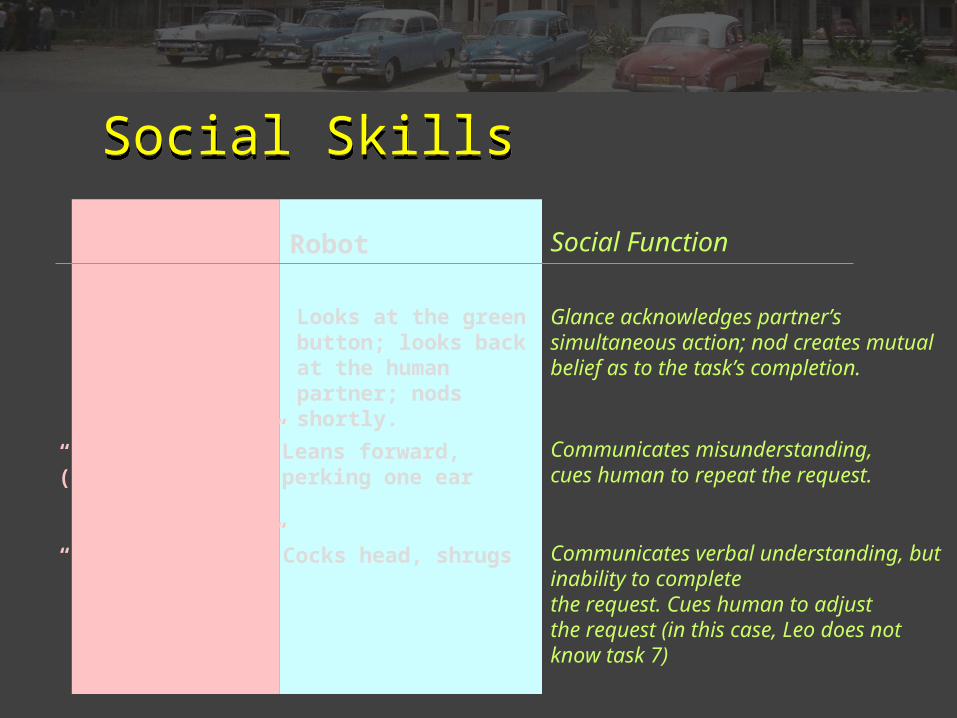
At the same time, presses the green button
Looks at the greenbutton; looks back at the human partner; nods shortly.
Glance acknowledges partner’s simultaneous action; nod creates mutual belief as to the task’s completion.
“Let’s do task 7”(unclear)
Leans forward, perking one ear
Communicates misunderstanding,cues human to repeat the request.
“Let’s do task 7” Cocks head, shrugs Communicates verbal understanding, but inability to completethe request. Cues human to adjustthe request (in this case, Leo does notknow task 7)