rpas activities at universitat politècnica de valència … presentations... · antena gps y...
TRANSCRIPT

Joan Vila CarbóUniversitat Politècnica de Valencia (UPV)
WorkshopOngoing Postgraduate and PhD research in RPAS domain
RPAS activities at Universitat Politècnica de València(UPV)
miércoles, 9 de marzo de 16
RPAS Activities at UPV
2
RPASactivitiesat UPV
Coursesand
Teaching
Researchlines
Collaborationwith industry
miércoles, 9 de marzo de 16

RPAS Activities at UPV
3
RPASactivitiesat UPV
Coursesand
Teaching
Researchlines
Collaborationwith industry
miércoles, 9 de marzo de 16

J. Vila Carbó
Courses and teaching
Master in Aeronautical Engineering Elective subject: RPAS applications- Image transmission and processing applications
RPAS-pilot Diploma
4
http: rpas.upv.es
DIPLOMA DE EXTENSIÓN UNIVERSITARIA EN PILOTAJE DE SISTEMAS DE AERONAVES TRIPULADOS
POR CONTROL REMOTO (RPAS)
miércoles, 9 de marzo de 16

J. Vila Carbó
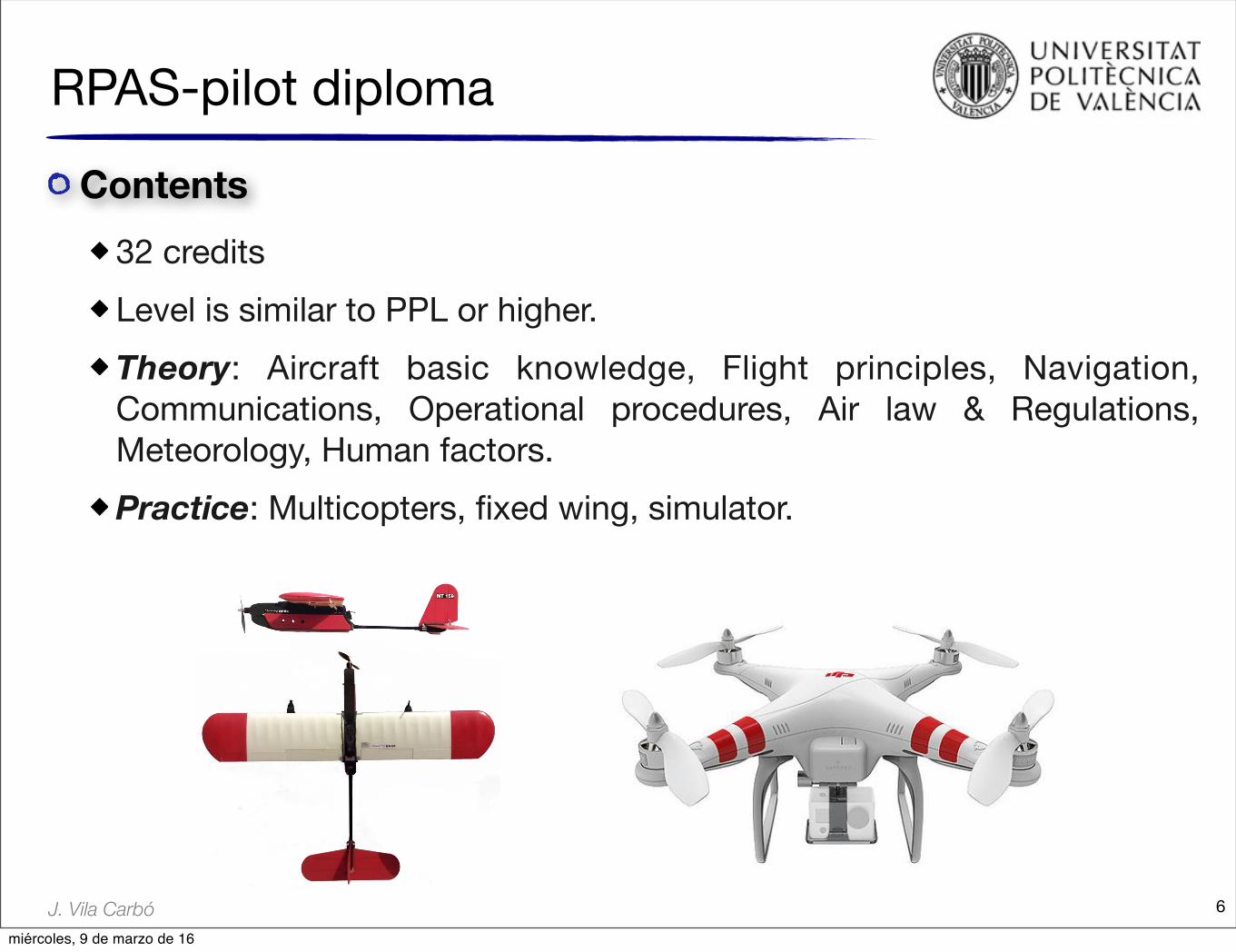
RPAS-pilot diploma
RPAS licenseThere is no specific RPAS official license yet, but the course contents are thought to meet requiring demands that could be established.Course contents meet current AESA requirements.Double diploma- UPV Diploma on RPAS‣ UPV specific title
- E-ATO-072: Aeroclub Castellón‣ AESA theory and practice certificates
StaffUniversity staffAirline pilots (Air Nostrum)Flight instructors
5
miércoles, 9 de marzo de 16
J. Vila Carbó
RPAS-pilot diploma
Contents32 creditsLevel is similar to PPL or higher.Theory: Aircraft basic knowledge, Flight principles, Navigation, Communications, Operational procedures, Air law & Regulations, Meteorology, Human factors.Practice: Multicopters, fixed wing, simulator.
6
MAGISTER V.1
A. - Generalidades MARCA: FLYTECHNIC
MODELO: MAGISTER RPAS V.1
Número de serie: MT 159
A.1. - Descripción de la aeronave
x Avión con peso máximo al despegue inferior a 2Kg.
x Avión escuela, instrucción de vuelo de pilotos RPAS.
x Construcción: Plano principal en Elapor. Superficies de cola de polipropileno corrugado de 3mm
de espesor. Fuselaje de EPP, polipropileno expandido y fibra de vidrio.
x Características: Motor tractor que le confiere máxima estabilidad a bajas velocidades. Para el
despegue se utiliza el sistema de lanzado a mano o catapulta.
x Superficies de mando: alerones, elevador, timón de dirección y flaps.
x Pilotaje: Diseñada para volar en 1ª persona. Dispone de sistema de transmisión de video con
antena GPS y telemetria proyectada en la pantalla de la estación remota.
x Vuelo: Especialmente diseñada para la formación de pilotos.
A.2. - Motor, hélice , regulador de velocidad y batería. Grupo propulsor.
x Número de motores: uno. Tipo: eléctrico Brushless tres polos. Potencia: 275 W, 1000 Kv.
x Regulador de velocidad: 30 Amperios, BEC 5V, 3 A.
x Hélice: diámetro 10”, paso 4,7” x Batería propulsor: Litio Polímero 3S1P, tensión nominal 11,1 V, capacidad 3000 mAh.
A.3. - Plano de tres vistas.
PHANTOM V.1
A. - Generalidades MARCA: DJI MODELO: PHANTOM V.1 Número de serie: PH646041414 A.1. - Descripción de la aeronave
x Aeronave multirrotor en configuración X4, con peso máximo al despegue inferior a 2 kg. x Control de eje de cabeceo /pitch, desplazamiento lateral (roll) y guiñada (yaw). x Controladora de estabilización giroscópica y GPS. x Comandado por transmisor de radio control en 2,4 GHz , 7canales. x Dispone de 5 modos de vuelo: Modo estabilizado GPS, Modo de vuelta a casa, Modo Bloqueo de
dirección y Modo de sensor de Altitud. x Sistema de protección por pérdida de enlace radio y bajo nivel de batería.
A.2. - Motor, hélice , regulador de velocidad y batería. Grupo propulsor.
x Número de motores: CUATRO. Tipo: eléctrico Brushless tres polos. Potencia: 250 W, 980 Kv. x Regulador de velocidad: 15 Amperios x Hélice: diámetro 8”, paso 4,7” x Batería propulsor: Litio Polímero 3S1P, tensión nominal 11,1 V, capacidad 2200 mAh.
A.3. - Plano de tres vistas.
miércoles, 9 de marzo de 16
RPAS Activities at UPV
7
RPASactivitiesat UPV
Coursesand
Teaching
Researchlines
Collaborationwith industry
miércoles, 9 de marzo de 16
J. Vila Carbó
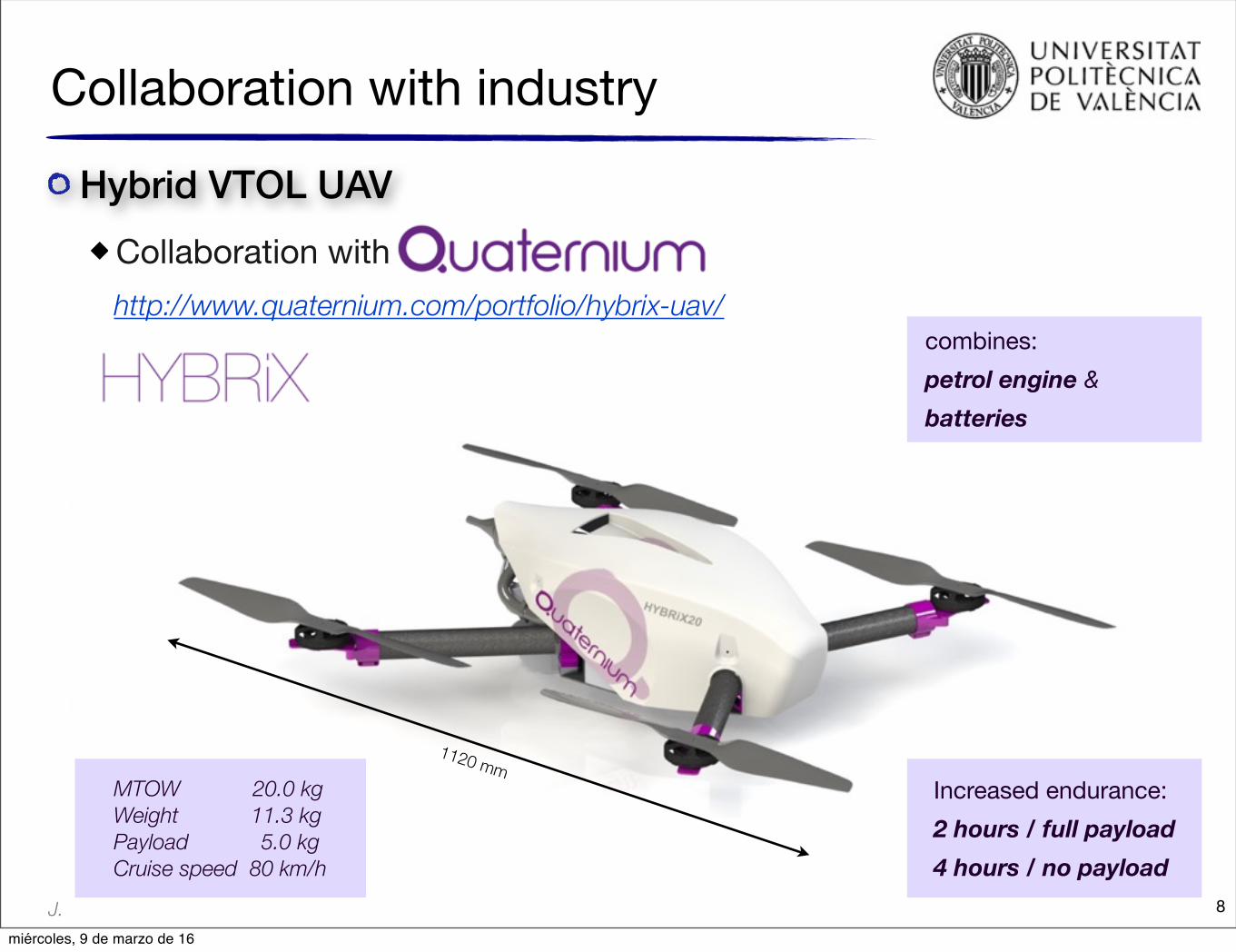
Collaboration with industry
Hybrid VTOL UAVCollaboration with Quaternium
8
Increased endurance:2 hours / full payload4 hours / no payload
1120 mmMTOW 20.0 kgWeight 11.3 kgPayload 5.0 kgCruise speed 80 km/h
http://www.quaternium.com/portfolio/hybrix-uav/combines:petrol engine & batteries
miércoles, 9 de marzo de 16
J. Vila Carbó
Collaboration with industry
Hybrid VTOL UAVCollaboration lines with UPV
- Improving robustness of Navigation System‣ Redundant navigation
- Improving the C2 link‣ Improving range‣ Reducing channels (C2, Telemetry, Video).
9
miércoles, 9 de marzo de 16

J. Vila Carbó
Collaboration with industry
Hybrid VTOL UAVRedundant autopilot configuration
10
switch
MotorPWMoutputs
Telemetry
CAN Failure sources must be carefully investigated to avoid common mode failures:
• Power supply glitches
• Electromagnetic noises
• Vibrations
• ...
miércoles, 9 de marzo de 16

RPAS Activities at UPV
11
RPASactivitiesat UPV
Coursesand
Teaching
Researchlines
Collaborationwith industry
miércoles, 9 de marzo de 16
J. Vila Carbó
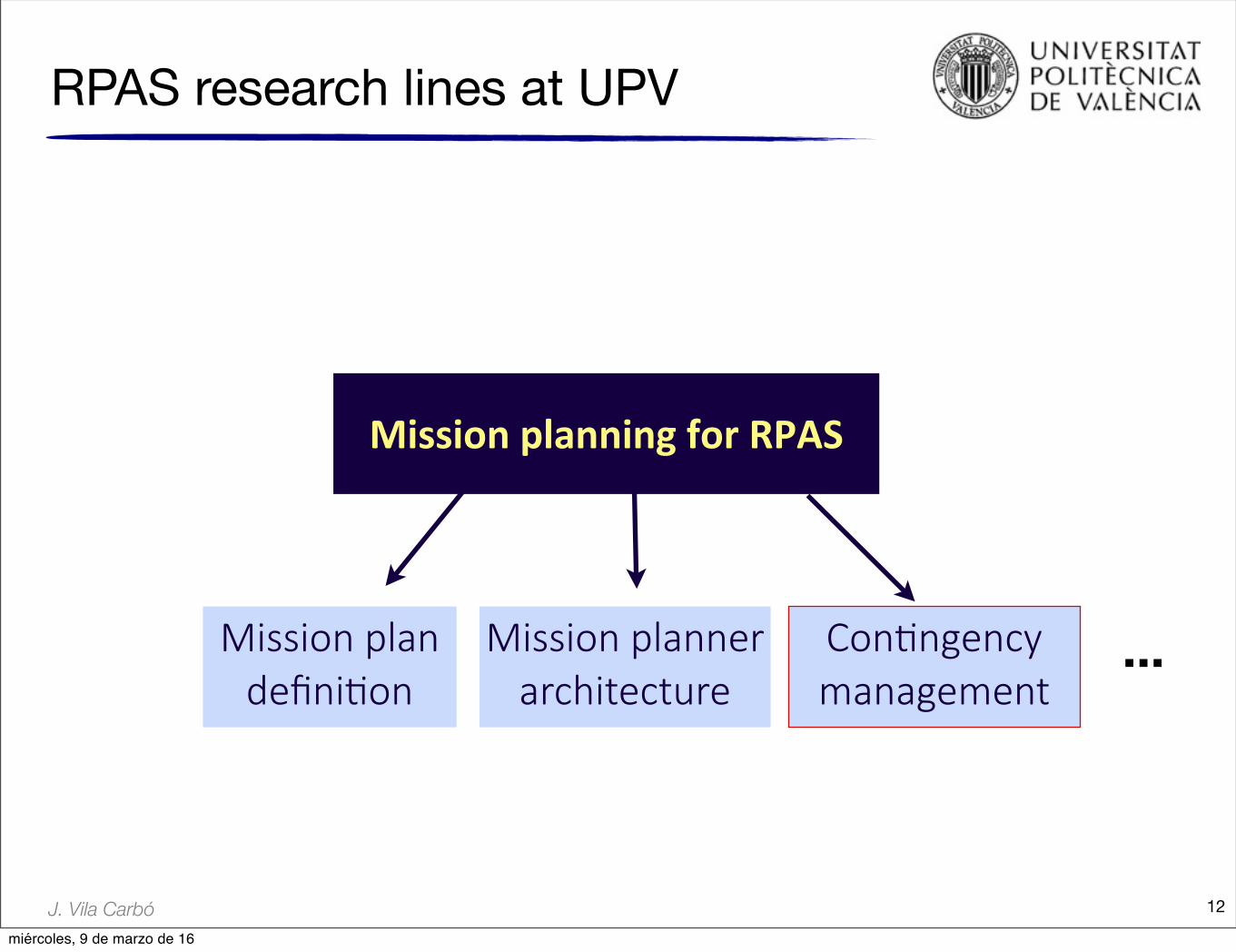
RPAS research lines at UPV
12
MissionplanningforRPAS
Con$ngency management
...Mission plandefini$on
Mission plannerarchitecture
miércoles, 9 de marzo de 16

J. Vila Carbó
Mission planning
RPAS missionFlight phases: Take-off -> En-route -> Operations -> En-route -> LandingExample:
13J. Vila Carbó
Navegación aérea Ing. Aeroespacial
LETL
LECHCMA169040
CMA
SOBROF15B
SOPET
SOPET1R
OPERATIONS AREA
SGO
PASILLOS
PASILLON
LEVC
IAF
CASINOS
LOITER PTL1
LOITER PTL2
lunes, 7 de marzo de 16miércoles, 9 de marzo de 16

J. Vila Carbó
Mission planning
Mission plan definitionBased on extending flight plans based on ARINC-424 Path Terminators.- Take-off, En-route, Landing phases‣ Flight plans for these phases must be submitted to ATC if the flight is in
controlled areas.‣ Mission plans can be implemented using a subset of ARINC-424 path
terminators specifications.
- Operations phase‣ Flight plans do not need to include detailed operations since they usually take
place out of controlled airspace. ATC, only needs authorizations and coordinates of operations area.
‣ Mission plans need to specify RPAS specific operations (SCAN, LOITER, SEARCH, ...). A possible approach is using Extended Path Terminators (EPT).
‣ Flexibility for defining specific maneuvers required by the payload.
14
miércoles, 9 de marzo de 16

J. Vila Carbó
Mission planning
Mission plan definition
15
Waypoint declaration
List of EPT
List of EPT
Main plan
Alternative plan 1 (contingency) * Activation conditions
List of EPT
Alternative plan n (contingency) * Activation conditions
Mission plan
...
miércoles, 9 de marzo de 16
J. Vila Carbó
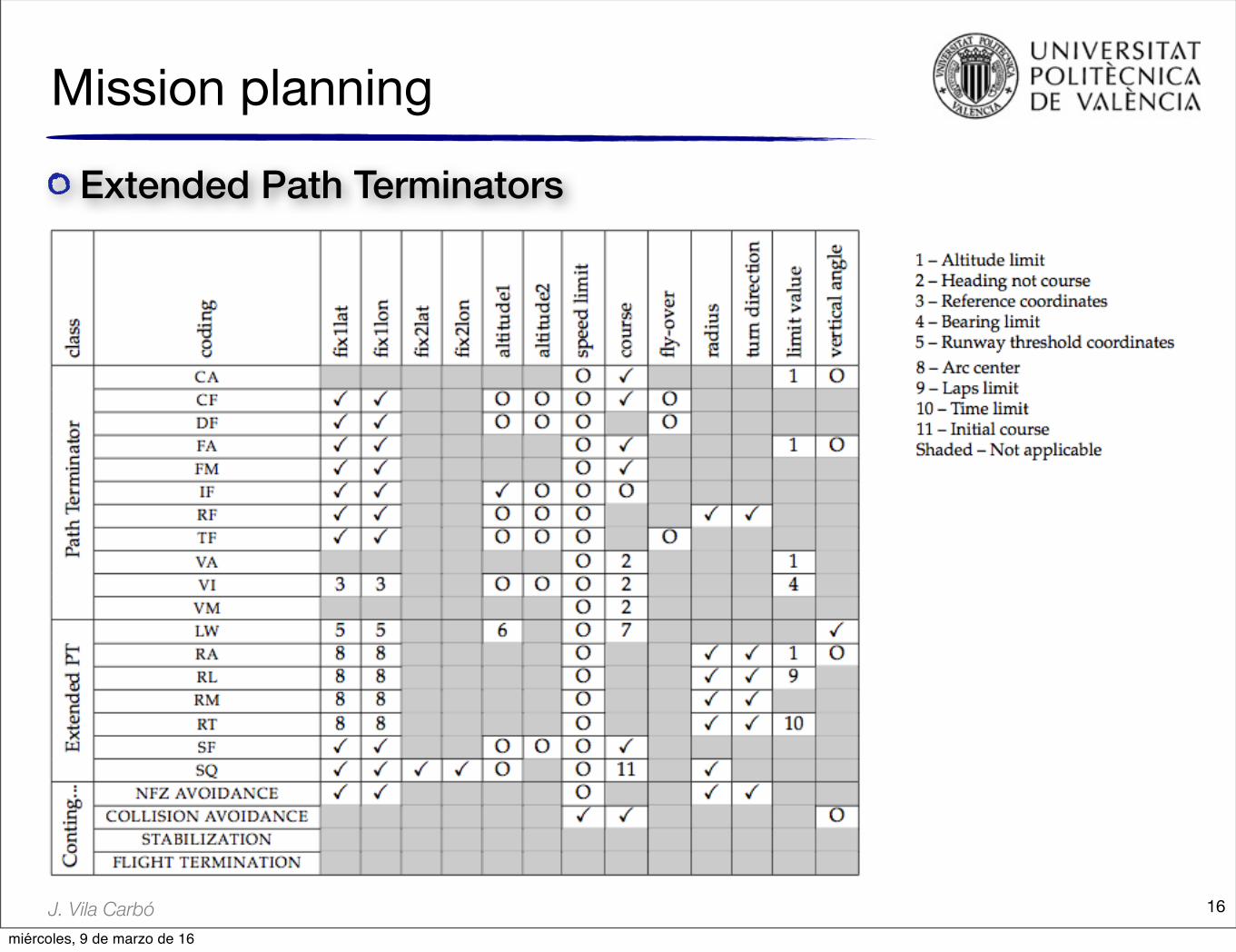
Mission planning
Extended Path Terminators
16
miércoles, 9 de marzo de 16

J. Vila Carbó
Mission planning
Mission plan definitionList of EPT
17
5.0%
CF MD047 - +2900 250 017 N - R
WP1 WP2 ALT1
-
ALT2SPDlimit Course
Flyover Radius
Turndirection
-
LimitValue
5.0%
Vertical angle
TF RBO - +8000 250 (42) Y - R- -
TF PINAR - +13000 - (77) Y - R- - 3.3%
IF PISAV - +4000 230 - N - --F110 - -
TF MG413 - +3000 - - N - R- - -
TF MG412 - +2000 - - N - -- - -
TF MG411 - +1700 - - N - -- - -
TF RWY31 - +84 - - Y - -- - 5.2%
...
SF WP23 - +2000 - 45 Y - R- - 3.3%
...
Pathterminator
miércoles, 9 de marzo de 16

J. Vila Carbó
Mission planning
Software architecture
18
Missionlayer
Events
Extended Path Terminators
Sequencinglayer
Control modes
Guidancelayer
Refs. for control system
ControlSystem
Mission plan Pilot commands
CommandsMission Plan
Cont
ingen
cy
Dise
ngag
emen
t
Strategicoperation
Tacticaloperation
Development platform
miércoles, 9 de marzo de 16

J. Vila Carbó
Mission planningMission layer
Strategic operation.Main goal: determining the next EPT to execute and send it to the Sequencing layer.Mission Plan and Pilot Commands processingAutomatic Modes management:
- Mission mode- Manual mode- Contingency mode
Contingency Procedure managementEvent handling:
- Contingency (C2 link loss, RA alert)- A/P disengagement- Preemptive event handling: a contingency
event preempts the execution of the current EPT.
19
Missionmode
Contingencymode
Manualmode
A/P DisengagementWP not reachableFlight envelope protection
ContigencyC2 link loss
Events
RA / Collision avoidance
miércoles, 9 de marzo de 16

J. Vila Carbó
Flight Management
SystemsFMSMission planning
Sequencing layerDecompose EPT into LNAV and VNAV maneuvers
20
TRACK (Distance, Bearing)
SF WP23 - - - 45 Y - R- - 3.3%
CIRCLE (Track)
TRACK (Distance, Bearing)
CIRCLE (Track)
LNAV
Direct maneuver Dubins path
VNAV
WP in direct reachability zone
WP out of direct reachability zone
VSPEED (Altitude)
Climb at constant SPD Climb at constant VS
No specifiedFPA
ALTITUDE ()
THRSPD()
VPATH (Altitude)
ALTITUDE ()
THRVS()
RequiredFPA
miércoles, 9 de marzo de 16
J. Vila Carbó
Flight Management
SystemsFMSMission planning
Guidance layerTactical operationProvides automatic control modes for the:- Roll- Pitch - Autothrottle
Automatic control modes provide the target references for the control loops.Provides flight envelope protection and raises A/P disengagement.
21
miércoles, 9 de marzo de 16
J. Vila Carbó
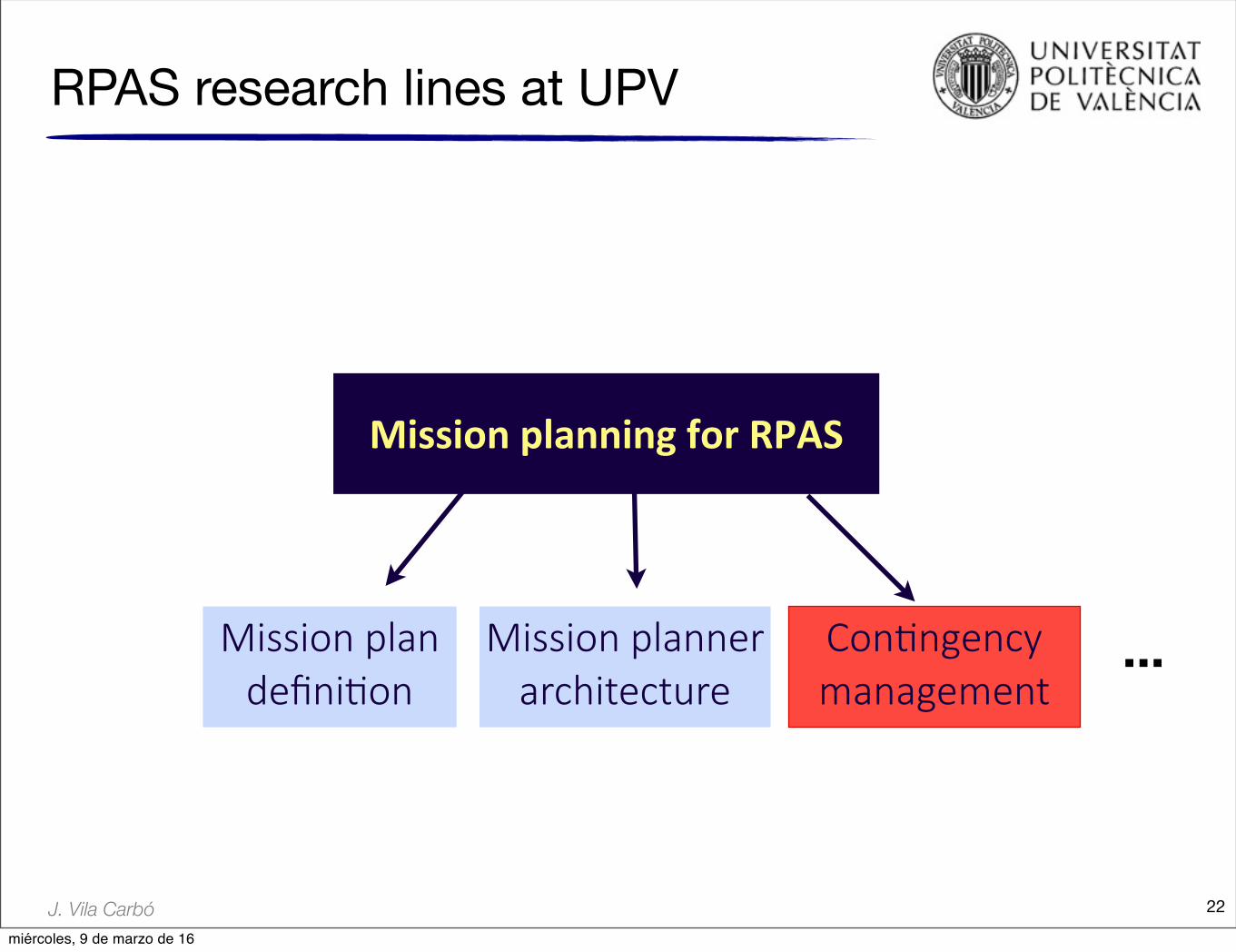
RPAS research lines at UPV
22
MissionplanningforRPAS
Con$ngency management
...Mission plandefini$on
Mission plannerarchitecture
miércoles, 9 de marzo de 16

J. Vila Carbó
Contingency management
Contingency alertsWe restrict our attention to the following alerts:- C2 link loss is the most RPAS specific failure- A/P disengagement- RA (Resolution Advisory) alert - GPS loss
23
miércoles, 9 de marzo de 16
J. Vila Carbó
Contingency management
Contingency alertsWe restrict our attention to the following alerts:- C2 link loss is the most RPAS specific failure- A/P disengagement- RA (Resolution Advisory) alert - GPS loss
Combinations of contingency alerts“Nested” alerts.They severely constrain the possible contingency procedures: most of them may imply flight termination.
24
miércoles, 9 de marzo de 16

J. Vila Carbó
Contingency management
25
ConCngencymanagementmustbeconsistentwith
ICAORPASManual
miércoles, 9 de marzo de 16

J. Vila Carbó
Contingency management
Identification of lost C2 link condition11.6.13 Degradations in the C2 link transaction time and availability from whatever cause will, if severe enough, result in a lost C2 link condition. 11.6.14 Temporary interruptions to C2 link transmissions can occur at times 11.6.15 While the C2 link is not available, the RPA is flying in a state where it is “not under the command” ... there will be a time period beyond which continued flight in this manner may not be considered acceptable.
- It is therefore important to determine the point at which a C2 link should be declared as being lost, (e.g. by display of a lost C2 link SSR code) at which point the lost C2 link procedure is initiated...
- This time period Tsloss may need to be standardized...
11.6.20 ... Repeated, intermittent degradation of the C2 link, even if only for a short duration, should be assessed by the remote pilot with regard to the acceptability of continuing the planned flight.
26
miércoles, 9 de marzo de 16
J. Vila Carbó
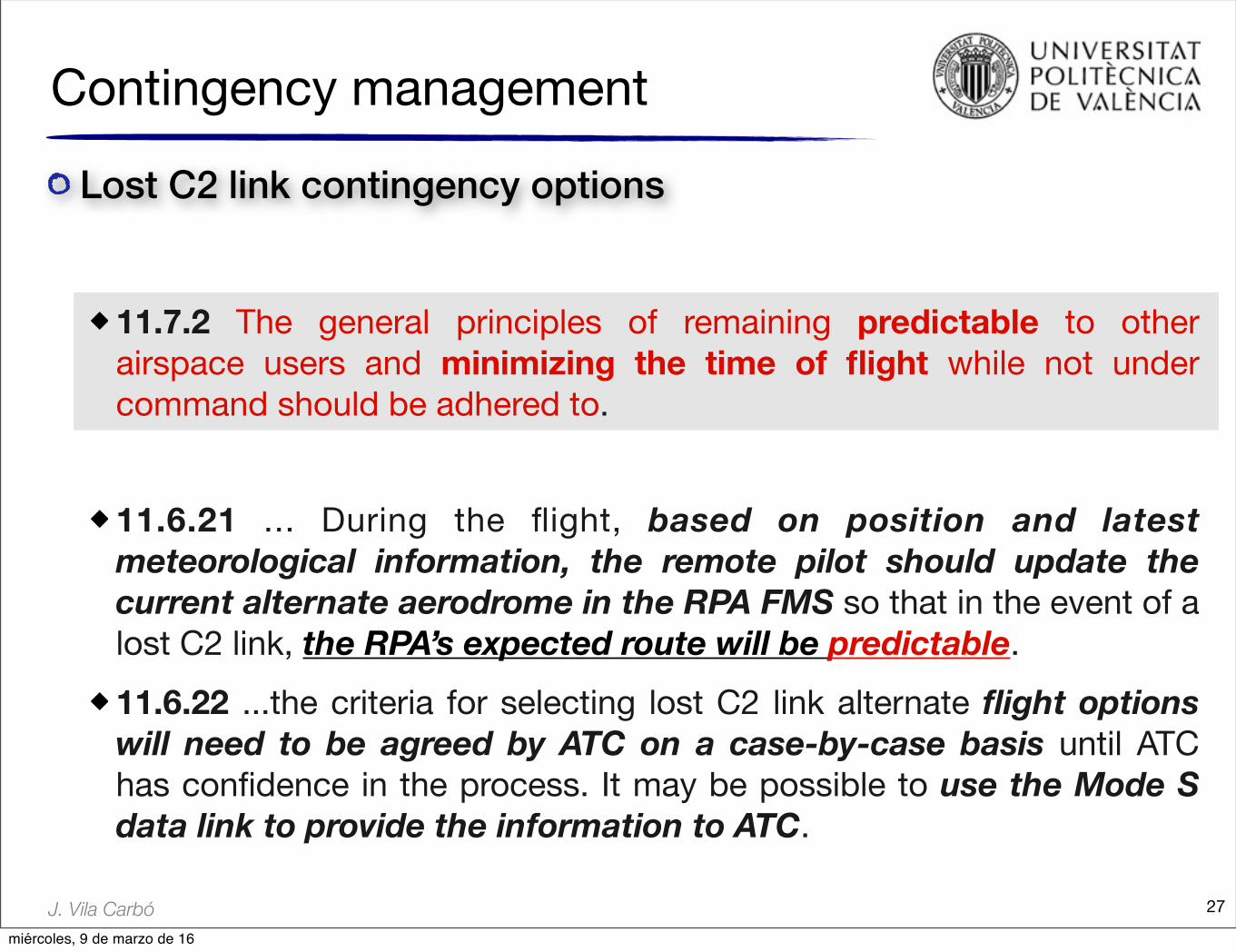
Contingency management
Lost C2 link contingency options
11.7.2 The general principles of remaining predictable to other airspace users and minimizing the time of flight while not under command should be adhered to.
11.6.21 ... During the flight, based on position and latest meteorological information, the remote pilot should update the current alternate aerodrome in the RPA FMS so that in the event of a lost C2 link, the RPA’s expected route will be predictable. 11.6.22 ...the criteria for selecting lost C2 link alternate flight options will need to be agreed by ATC on a case-by-case basis until ATC has confidence in the process. It may be possible to use the Mode S data link to provide the information to ATC.
27
miércoles, 9 de marzo de 16

J. Vila Carbó
Contingency management
Lost C2 link contingency options11.6.23 There are five basic contingency options to be considered by the RPAS operator, - a) continue original flight plan- b) land at nearest appropriate designated landing site- c) direct return to departure aerodrome or departure site - d) flight termination- e) climb to altitude to attempt to regain the C2 link
28
alternative planalternative plan
specific op.specific op.
miércoles, 9 de marzo de 16

J. Vila Carbó
RPAS research lines at UPV
Thanks for your kind attention!
29
miércoles, 9 de marzo de 16
J. Vila Carbó
Extra slides
30
miércoles, 9 de marzo de 16
J. Vila Carbó
Collaboration with industry
Redundant autopilotArbitration - election of the ACTIVE autopilot is based on:- Mutual monitoring of the A/P‣ Periodical “I’m alive” messages sent to CAN bus by each A/P.
- EKF health monitoring‣ EKF estimates attitude, velocity, position using sensor fusion (IMU, GPS, baro,
airspeed)‣ Health monitoring is based on the evaluated level of noise
- GPS health monitoring‣ It depends on number of satellites and comparison with EKF estimations.
Switch design is also a key issue- It must be simple and not subject to common mode failures
31
miércoles, 9 de marzo de 16

J. Vila Carbó
Flight Management
SystemsFMS
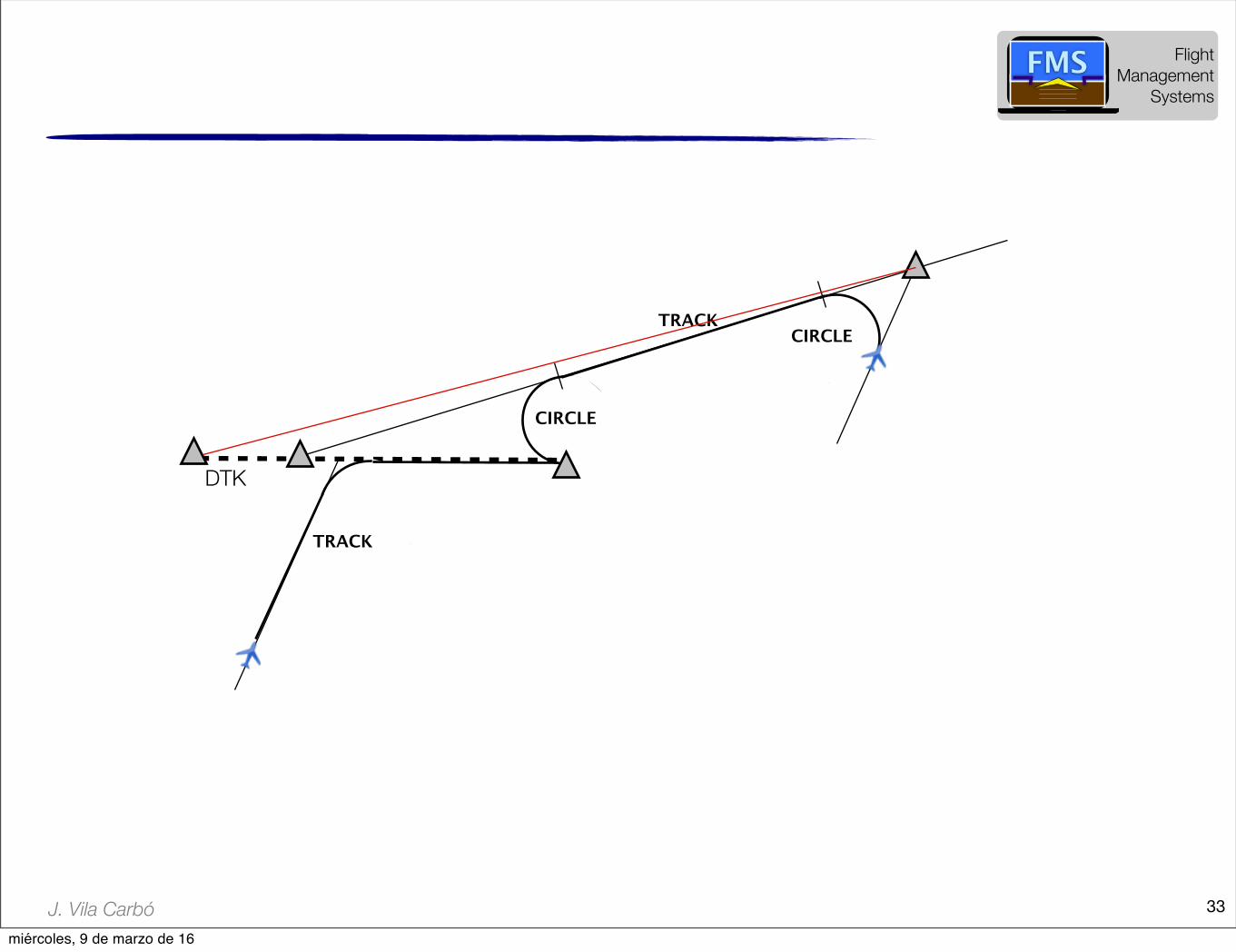
Sequencing layerDecompose an EPT into their corresponding maneuvers for the:- LNAV profile,- VNAV profile
LNAV and VNAV maneuvers are independent.Decompose maneuvers into a sequence of elementary control modes.- The sequence of elementary maneuvers is a function of the final state
(position and attitude) which the maneuver is pursuing, and the RPAS current state.
Control modes have an associated termination condition.- Termination conditions are used to disengage the currently armed control
mode and engaging the next control mode in the sequence.
32
miércoles, 9 de marzo de 16
J. Vila Carbó
Flight Management
SystemsFMS
33
DTK
TRACK
TRACKCIRCLE
CIRCLE
miércoles, 9 de marzo de 16

J. Vila Carbó
Flight Management
SystemsFMS
34
DTK
TRACK
TRACK
CIRCLE
CIRCLE
HEADING
miércoles, 9 de marzo de 16