rpb-md: providing robust message dissemination for vehicular ad hoc networks
TRANSCRIPT

Ad Hoc Networks 10 (2012) 497–511
Contents lists available at SciVerse ScienceDirect
Ad Hoc Networks
journal homepage: www.elsevier .com/locate /adhoc
RPB-MD: Providing robust message dissemination for vehicularad hoc networks q
Congyi Liu, Chunxiao Chigan ⇑ECE Department, Michigan Technological University, 712 EERC, 1400 Townsend Dr, Houghton, MI 49931-1295, USA
a r t i c l e i n f o
Article history:Received 9 July 2010Received in revised form 28 May 2011Accepted 18 September 2011Available online 22 September 2011
Keywords:Directional greedy broadcast routingMessage disseminationRelative position basedVANET
1570-8705/$ - see front matter � 2011 Elsevier B.Vdoi:10.1016/j.adhoc.2011.09.003
q This paper is supported by the National Scienceaward under Grant No. 0644056.⇑ Corresponding author. Tel.: +1 906 487 2494; fa
E-mail addresses: [email protected] (C. Liu(C. Chigan).
a b s t r a c t
To improve traffic safety and efficiency, it is vital to reliably send traffic-related messagesto vehicles in the targeted region in vehicular ad hoc networks (VANETs). In this paper, wepropose a novel scheme, relative position based message dissemination (RPB-MD), to reli-ably and efficiently disseminate messages to the vehicles in the zone-of-relevance. Firstly,the relative position based (RPB) addressing model is proposed to effectively define theintended receivers in the zone-of-relevance. To ensure high message delivery ratio andlow delivery delay, directional greedy broadcast routing (DGBR) is introduced to make agroup of candidate nodes hold the message for high reliability. Moreover, to guarantee effi-ciency, the protocol time parameters are designed adaptively according to the messageattributes and local vehicular traffic density. The protocol feasibility is analyzed to illus-trate the robustness and reliability of RPB-MD. Simulation results show that RPB-MD, com-pared with representative existing schemes, achieves high delivery ratio, limited overhead,reasonable delay and high network reachability under different vehicular traffic densityand data sending rate.
� 2011 Elsevier B.V. All rights reserved.
1. Introduction
Mobile ad hoc networks (MANETs) [1], which can be de-ployed rapidly without pre-existing infrastructures, haveattracted extensive academic and industrial research dueto its broad applications. As a special instance of MANETs,vehicular ad hoc networks (VANETs) are believed to greatlyimprove traffic safety and efficiency. The prospective appli-cations of VANETs can be categorized into safety andnon-safety related. In [2], it is reported that more than 34vehicle safety related applications may be improved or real-ized by VANETs. For example, with safety assistant systemsbased on VANETs, the number of vehicle accidents issupposed to be reduced significantly [3]. For non-safety
. All rights reserved.
Foundation CAREER
x: +1 906 487 2949.), [email protected]
applications, VANETs will significantly improve traffic effi-ciency, effectively provide passenger comfort or dissemi-nate commercial information. Recently, the government,academic and industry organizations have launched manyprojects worldwide for the development of VANETs, suchas IntelliDrive [4], GeoNet [5], CVIS [6], PReVENT [7] andNoW [8].
To provide spatial and temporal information amongvehicles, the relevant messages need to be delivered to in-tended vehicles located in specified target region. Forexample, the message of traffic congestion should be dis-seminated to remote vehicles near the preceding en-trance/exit, so that they can change their route in advanceto avoid the congestion. More importantly, for safety re-lated applications, message dissemination in VANETsshould guarantee robust packet delivery within limited de-lay. However, achieving effective and efficient message dis-semination in VANETs is challenging due to their uniquefeatures, such as high mobility, frequent partitions, largescale and varying traffic density. Considering the unique

498 C. Liu, C. Chigan / Ad Hoc Networks 10 (2012) 497–511
features of VANETs mentioned above, the mechanism of‘‘store-carry-forward’’ [11] has been introduced to supportthe message propagation in VANETs. Though many existingschemes [12,9,20] have been proposed for message dissem-ination in VANETs, it remains an open problem to reliablyand efficiently deliver messages under different vehiculartraffic scenarios, as discussed in Section 2.
In this paper, we address the issue of reliably and effi-ciently disseminating messages to all intended vehicles inthe zone-of-relevance (ZoR) [12]. Here, ZoR defines thearea wherein the message is of interest to the drivers. A no-vel solution, relative position based message dissemination(RPB-MD), is proposed to ensure robust message dissemi-nation in VANETs. By defining the ZoR based on the relativeposition and forwarding the message based on the relativedistance and moving direction, RPB-MD greatly reducesthe communication overhead and improves the reliabilityof message dissemination. The key contributions of this pa-per are as follows:
(1) We propose the relative position based message dis-semination (RPB-MD) protocol to guarantee highdelivery ratio with acceptable latency and limitedoverhead. Firstly, the relative position based (RPB)addressing model is designed as an anonymousaddressing model to effectively define the destination.The directional greedy broadcast routing (DGBR) is pro-posed to make a group of upstream nodes hold mes-sages to improve the dissemination reliability. Byrebroadcasting the message dynamically, RPB-MDcan provide efficient message dissemination ensuringrobustness independent of vehicular traffic density.
(2) The vehicle mobility model is incorporated to adap-tively design the protocol time parameters. Based onthe extended car following model [36,38], RPB-MDcan adjust the time parameters dynamically andintelligently according to the message attributesand local vehicular traffic density. In addition, allthe information needed to design the time parame-ters is local vehicle traffic density and average speed,which thus will not increase the protocol complexityand computation.
(3) The feasibility of RPB-MD is analyzed to show theefficiency, robustness and applicability of the pro-posed protocol. Under varying traffic density, ourdesign can ensure that the message will be dissem-inated efficiently. In addition, RPB-MD is robust tothe traffic density accuracy, relative distance accu-racy and packet duplication. It is also showed thatRPB-MD can be extended to 2-D scenarios. Further-more, extensive simulations confirmed the reliabil-ity and efficiency of RPB-MD.
The rest of this paper is organized as follows. Section 2elaborates the related work about message disseminationin VANETs. In Section 3, we present the details of our pro-posed scheme of RPB-MD. The implementation of RPB-MDis demonstrated in Section 4. Simulation results are givenand discussed in Section 5, followed by the conclusionand future work in Section 6.
2. Related work
Robust message dissemination in VANETs is compli-cated and challenging since VANETs are highly mobile,sometimes sparse and essentially unbounded. To providedata transmission service in MAENTs, a plenty of mecha-nisms have been proposed, such as destination sequenceddistance vector (DSDV) routing [13], ad hoc on-demanddistance vector (AODV) routing [9] and dynamic sourcerouting (DSR) [10]. However, due to high mobility and fre-quent partitioning, these traditional protocols would noteffectively work in VANETs. The blind flooding [14] maybe the simplest method to improve message delivery ratiofor multi-hop communication at the price of extremelyhigh overhead. Thus, the flooding based approaches [15]use the location information to improve the protocol per-formance. However, the conventional flooding mechanismwill lead to the problem of broadcast storm [16].
One of the earliest schemes for message disseminationin VANETs was proposed in [12]. In this paper, the authorsproposed an algorithm to mitigate broadcast storm bydelaying different time to avoid the peak load. Later, sev-eral approaches for message dissemination in VANETs,most of which were position based, were proposed to suitdifferent environments. By using the digital map and thevehicles in the intersections, greedy perimeter coordinatorrouting (GPCR) [17] combines the position-based routingwith topological knowledge to disseminate the message.The connectivity-aware routing (CAR) [18], based on theassumption that there would be an end-to-end path be-tween the source and destination pairs, can locate posi-tions of destinations and find the connected paths whichare auto-adjusted on the fly. Due to the search for theend-to-end path and maintenance of the topology andneighborhood information, these approaches would leadto a large amount of overhead and limited delivery ratioespecially under sparse vehicular traffic.
To deal with the disconnection in the sparse vehiculartraffic, some schemes, such as mobility-centric data dis-semination algorithm (MDDV) [19], vehicle-assisted datadelivery (VADD) [20] and edge-aware epidemic protocol(EAEP) [21] were proposed. These schemes applied theidea of ‘‘carry and forward’’ to ensure that messages cancross the partitions. However, these schemes wouldgreatly increase overhead (especially under the densevehicular traffic) and computation complexity because ofthe process of partition crossing. When selecting the nextbest forwarder to achieve high delivery ratio with least la-tency, different strategies focus on different factors. Forexample, VADD [20] will select a forwarding route withthe smallest packet delivery delay based on the digitalmap and traffic statistics information. Some other routingalgorithms [22,23] considered not only the position ofthe nodes, but also the direction of vehicle movement.Nevertheless, these algorithms only select one node to car-ry and forward the message in the route, which cannotguarantee robustness.
Multicast [24–26] is introduced to deliver the messagefrom a single source vehicle to all the related nodes in thedestination area, while geocast routing [27] is implemented

C. Liu, C. Chigan / Ad Hoc Networks 10 (2012) 497–511 499
to propagate the message to a specific geographic region. In[24], the authors introduced the inter-vehicle geocast (IVG)to inform all the vehicles on the highway about the dangerwarning by defining the multicast group based on the loca-tion, speed and driving direction of vehicles. Joshi et al. [27]proposed a distributed geocast routing, which is robust tothe topology changes and network fragmentation, to re-duce the number of hops and redundant broadcasts. Inaddition, broadcast protocol [28,30] is utilized for a sourcevehicle to broadcast message to all other nodes in VANETs.For example, in DV-CAST [28], each vehicle monitors thestates of neighboring vehicles all the time to make thebroadcasting decisions. Generally, the work mentionedabove is either inefficient or unreliable to be implementedin the real traffic scenarios.
Therefore, we propose a novel scheme, relative positionbased message dissemination (RPB-MD), which is a robustmechanism to disseminate the messages to vehicles in thezone-of-relevance. Different from the aforementionedwork, to ensure robust message dissemination, we makeuse of the information of relative position and movingdirection to select the best forwarder, and form a groupof message holders to carry the message to ensure reliabil-ity. Moreover, incorporated with the vehicle mobility mod-el, the protocol time parameters can be adjusted adaptivelyaccording to different traffic scenarios, which will ensurethe feasibility and applicability of RPB-MD.
3. RPB-MD: relative position based messagedissemination
In this section, the design details of RPB-MD will be pre-sented, including the relative position based (RPB) address-ing model and directional greedy broadcast routing (DGBR).The RPB addressing model is proposed to effectively definethe destination. The key idea of DGBR is to optimally selectthe next forwarder and make a group of nodes intelligentlyhold and contend to transmit the message in different traf-fic scenarios. Instead of a single node, RPB-MD considersthat the destinations of messages are all vehicles in the ZoR.
Here, we assume that vehicles can obtain the relativedistance between two neighbors based on their GPS posi-tion information. When the GPS signal is absent, such as
Table 1Time Parameters.
Parameter Parameter definition
t0 Delay of the message transmission from the source tothe first vehicle in the destination area
T0 Message lifetimeT Allowed maximum waiting time to rebroadcast the
messageTi The ith neighbor’s waiting time to contend to
rebroadcast the messageT0 Interval of the message rebroadcastingt1 Allowed holding time of the message holders who do
not receive the implicit ACKt2 Allowed holding time of the message holders who do
not receive the explicit ACKt3 Allowed holding time of the message holders who do
not receive the expected explicit ACK
in a tunnel, vehicles can still attain the relative distance be-tween two neighbors (i.e. based on received signal strengthindication, RSSI [40]). In addition, we assume that twodirectional antennas (with beamwidth of 180�), with onepointing to the front and the other pointing to back, areequipped for every vehicle to reduce communication inter-ference [29]. Meanwhile, because all the vehicles will peri-odically broadcast beacons, containing the currentlocation, speed and heading direction of the sender, to sup-port road safety applications [31], we assume all the vehi-cles can acquire the information of local vehicle trafficdensity and average vehicle velocity based on the beaconsreceived. Throughout this paper, the time parameters,implemented in RPB-MD for the time period design, aredefined as in Table 1.
3.1. Addressing model
Essentially, VANETs are unbounded and usually it is dif-ficult to retrieve the identities of the intended receivers inadvance. Therefore, the anonymous addressing model isdefined based on some vehicle properties, such as the po-sition or speed information, to reduce the communicationoverhead of control packets. In the existing work, someanonymous addressing models, such as the position-based[32] and content-based addressing models [33], are pro-posed. In this paper, the transmission of messages will tar-get vehicles in a particular geographic area, and this areashould be in the relative position with respect to the sourcenode. Thus, we propose RPB addressing model to effec-tively define the destination. Specifically, the RPB address-ing model defines the relative position of the destinationarea with respect to the message source node, includingthe total relative distance R
!t and the dissemination direc-
tion u, as shown in Fig. 1.Let X denote the set of all vehicles in the zone-of-rele-
vance. Node j is a vehicle on the highway. r is the range ofthe zone-of-relevance. The RPB addressing model can beformally stated as:
h8t; R!
t : t0 6 t 6 T0 ^ �r 6 R!
t 6 0 :: j 2 Xi ð1Þ
This statement can be interpreted as: During the mes-sage dissemination session t0 6 t 6 T0, each vehicle j withthe R
!t satisfying �r 6 R
!t 6 0 should be in the intended re-
ceiver set X. Here, t0 is the delay requirement decided bythe specific application of this message [34]. Therefore,every dissemination session has two phases (we assumethat all the vehicle nodes are synchronized to define thesephases). The first phase, from time 0 to t0, is the forwardingphase in which the message is disseminated from thesource vehicle to the first vehicle in the zone-of-relevance.
ϕ
rRt
Fig. 1. Relative position based (RPB) addressing model.

rRt
uRRi
Fig. 2. Update of the total relative distance.
500 C. Liu, C. Chigan / Ad Hoc Networks 10 (2012) 497–511
The second phase, from time t0 to T0, is a stable phase inwhich the message is stored in the zone. In this paper,we focus on the forwarding phase.
Thus, by including the information of R!
t , u, [t0, T0] and rin the message header, RPB-MD can effectively define theintended vehicles without any other control packet ex-changes. Based on RPB addressing model, when the mes-sage is disseminated on the highway, as shown in Fig. 2,the receiver will calculate the update of total relative dis-tance, according to the equation below
R!
u ¼ R!
t � R!
i: ð2Þ
Here, R!
i is the relative distance from the sender to the re-ceiver. R
!u and R
!t are the total relative distance to the des-
tination area edge from the receiver and senderrespectively.
3.2. Directional greedy broadcast routing
To simplify the discussion, here we only consider thescenario of straight highway without any intersections.With further extension, this scheme is applicable in thegeneric 2-D environment (refer to Section 4.2.5). The ap-proach of directional greedy broadcast routing (DGBR) isproposed to achieve robust message dissemination andsignificantly reduce the communication overhead.
In the forwarding process, as shown in Fig. 3, everynode may go through three states and enter one stage: ac-tive state, intermediate state, inactive state and failure pro-cessing. The node in active state will be the messagehead, while the nodes in intermediate state are the mes-sage holders. The nodes, which do not receive or havedropped the message, will be in inactive state. When themessage holders cannot receive the explicit/implicit
Inactive State
Active State Intermediate State
(1) (2)
(3)
(4)
(5)
(6)(9) (10)
(7)(8)
Failure Process(12)(11)
Fig. 3. The state transfer of the vehicles.
acknowledgment (ACK) correctly, the failure processingwill be executed to help them go back to the inactive state.Meanwhile, when the nodes satisfy certain conditions,elaborated in details below, they will transfer from onestate to another.
In RPB-MD, only the message head can forward themessage, while the message holders can be the candidatemessage head. Generally, the message head goes throughtwo phases: one is the ‘‘omni-directional winner rebroad-casting’’, which can ensure the message is disseminatedwith the most progress. The other one is the ‘‘back-direc-tional ACK broadcasting’’, which acknowledges the oldmessage holders that the message has been transmittedto another group successfully. In the forwarding process,RPB-MD can naturally form a group of nodes to carry andforward the message with no control packet exchange. Toimprove the transmission reliability, all the message hold-ers will carry this message with certain probability untilsome conditions are satisfied to drop the message. Gener-ally, DGBR consists of three processes: state migration, fail-ure processing and the update of total relative distance.
3.2.1. State migrationAs shown in Fig. 4, vehicle A is assumed to be the mes-
sage source node, and it transmits the message to its frontvehicles by its front directional antenna. In A’s communi-cation range, vehicles B and C will receive this messageat their first time, and they will contend to rebroadcastthe message after their own period Ti:
Ti ¼ Tð1�WiÞ ð3Þ
where Wi is the ith neighbor’s waiting weight decided bythe neighbor’s attributes, such as moving direction or posi-tion. Because each of the receiver will run its own timeraccording to its Ti for this contention, the node with thelargest Wi will contend to be the new message head to for-ward the message based on Eq. (3). Therefore, the optimalcalculation of Wi can achieve the best forwarding strategyin the sense of reliability and delivery delay. Here, the fac-tors of vehicle’s relative distance and moving direction areconsidered to make the best tradeoff between the position-first and direction-first forwarding strategy [22,23]. To re-flect these two factors, Wi is decided as below.
Wi ¼ a � R!
i
Rþ b � n ð4Þ
where a and b are the weights of relative distance andmoving direction respectively, and R is the vehicle commu-nication range, which is assumed to be uniform for all thenodes. The value of n is decided as below.
A B
C
D
E
F
Fig. 4. The illustration of directional greedy broadcast routing.

C. Liu, C. Chigan / Ad Hoc Networks 10 (2012) 497–511 501
n¼1 Direction of node i is same as that of message diss:0 Direction of node i is opposite to that of message diss:
�
Based on the message waiting time decided by Eqs. (3)and (4), vehicle C, with the smallest Ti, will be the best nextforwarder to rebroadcast the message with its two direc-tional antennas, and it will transit from inactive state to ac-tive state to act as the new message head, which isassociated to condition (1) in Fig. 3. As shown in Fig. 4,overhearing the rebroadcast (in the first hop contendingperiod) from vehicle C, vehicle A and B will regard the re-broadcast as an implicit ACK. Hence, vehicle A will transitfrom active state to intermediate state and act as the mes-sage holder, which is associated with condition (3) inFig. 3. While vehicle B will satisfy the condition (2) inFig. 3 to transit from inactive state to intermediate state,and hold this message with the probability according to:
Pi ¼ 1� e�e 1� R
!i
R
� �ð5Þ
where e is a protocol parameter related to the traffic den-sity. Here, considering the tradeoff between communica-tion reliability and overhead, the exponential function isused, where the increase in R
!i gives the proportional de-
crease in Pi, which is bigger than that of the linear function.Similarly, after the new message head vehicle C for-
wards the message, vehicle E will win the contention to re-broadcast the message in the second hop contendingperiod. Vehicle C, the old message head, will overhear E’srebroadcast and can be sure that the message has been dis-seminated to its next group successfully. Hence, vehicle Cwill send an explicit ACK to its neighbors in the oppositemessage dissemination direction. Receiving this explicitACK, vehicle A and B will drop their holding message totransit from intermediate state to the inactive state, whichis associated with condition (4) shown in Fig. 3.
In the case that the message head E does not overhearany new rebroadcast after T, the network is considered tobe disconnected and vehicle E will rebroadcast the mes-sage at an interval T0. In this period of partition crossing,if a message holder vehicle F surpasses vehicle E and it re-ceives the rebroadcast message from E, vehicle F will re-broadcast the message immediately and act as the newmessage head, which is associated with condition (5) inFig. 3. Meanwhile, when the old message head vehicle Eoverhears the rebroadcast from vehicle F, it will transitfrom active state to intermediate state and act as a mes-sage holder, which is associated to condition (6) in Fig. 3.
In the case without receiving the implicit ACK after acertain time period t1, the message holders vehicle D andF, whose moving direction is the same as the message dis-semination direction, will consider the message head vehi-cle E has some fault to disseminate the message. Then theywill continue to contend to rebroadcast the messageaccording to the time below.
Ti ¼ T½1� eð~v i t1�R!
tiÞ� ð6Þ
where T is the same as in Eq. (3). ~v i is the velocity of the ithmessage holder, and R
!ti is the total relative distance from
the ith message holder to the destination area edge. Vehicle
F, which will win the contention, will transit from the inter-mediate state to active state and act as the new messagehead. This is associated to condition (7) in Fig. 3.
Meanwhile, when the message holder, whose movingdirection is different from the message disseminationdirection, does not receive the implicit/explicit ACK for acertain time t2 after it receives the implicit ACK, it will dropthe message and transit from the intermediate state to theinactive state, which is associated with condition (8) inFig. 3.
3.2.2. Failure processingIn previous discussion, we only consider the situation
when the message head encounters certain abnormalmodes and cannot rebroadcast the message any more.However, there may be other failure/abnormal modes,wherein some message holders could not correctly receivethe expected implicit/explicit ACK sent by the messagehead. Therefore, to guarantee robust message dissemina-tion, a failure processing mechanism is introduced to dealwith this case.
Firstly, we consider the scenario that the message holder(old message head) does not receive the implicit ACK,which is associated to condition (9) in Fig. 3. If the old mes-sage head vehicle C does not receive the expected implicitACK from the new message head vehicle E in a certain timeT0, as shown in Fig. 4, the failure processing will solve thisproblem by the following strategy: (i) The old messagehead (vehicle C) will rebroadcast the message again afterT0; (ii) (a) If the new message head (vehicle E) is in C’srange, E will send an implicit ACK to C immediately; (b)Otherwise, the new message holders (vehicle D and F) willcontend to send the implicit ACK to C within time Ti:
Ti ¼ T � ðR!
i=RÞ ð7Þ
After receiving the implicit ACK associated to condition(11), C will drop the message and transfer to the inactivestate. Then, we consider another failure mode whereinthe message holder does not receive the explicit ACK asso-ciated to condition (10) in Fig. 3. For example, as shown inFig. 4, if vehicle A does not receive the expected explicitACK from the old message head C in a certain time t3, thefailure processing mechanism will enforce the followingstrategy to manage it: (i) The message holder vehicle A willrebroadcast the message after t3; (ii) (a) If the old messageheader vehicle C is still in A’s range, C will send an explicitACK to A immediately; (b) Otherwise, the old messageholders (only vehicle B in Fig. 4), who have received the ex-plicit ACK, will send the explicit ACK to A after the period Ti
according to Eq. (7). After receiving the explicit ACK asso-ciated to condition (12), A will drop the message and trans-fer to the inactive state.
3.2.3. Update of total relative distanceWhen the node in the next group has received the new
message successfully, it will update the total relative dis-tance according to Eq. (2). However, when the messagecarrier has to carry the message, it also needs to updateR!
t before it sends the message again. The carrying progress(~di) of the message is:

502 C. Liu, C. Chigan / Ad Hoc Networks 10 (2012) 497–511
~di ¼ ðts � trÞ �~v i ð8Þ
where, ts and tr are the message sending and receiving timerespectively, and ~v i is the average velocity of the carrier inthe carrying process. Therefore, before the message is sent,the carrier node will update the total relative distanceaccording to the following equation.
R!
u ¼ R!
t �~di ð9Þ
Based on Eqs. (2) and (9), the update of total relativedistance can be achieved to define the intended receiverscorrectly.
4. Implementation of RPB-MD
The work-flow of RPB-MD can be simply illustrated byFig. 5. From message head 1 to message head N, the mes-sage is disseminated by DGBR which is similar to the gree-dy forwarding and is based on the information of relativedistance and moving direction. However, with the messageholders introduced, this forwarding scheme ensuresrobustness.
According to the discussion above, it is necessary todynamically design the algorithm parameters a, b and eand the time parameters T0, T0, t1, t2 and t3. All the informa-tion needed to design the parameters is only local trafficdensity, speed and the number of neighbors, which canbe achieved in real time by exchanging beacons amongneighbors [31]. Therefore, RPB-MD can be effectivelyimplemented with simplicity.
For a and b in Eq. (4), we can set a + b = 1. To make ourproposed protocol to be adaptive to the real vehicular traf-fic, a should be related to the vehicle velocity ~v i and trafficdensity kD (veh/m), so it can be set as:
a / 1� e�½Rð~v iÞ=vmaxþkDR� ð10Þ
where, vmax is the speed limit on the highway. Rð~v iÞ is theramp function of vehicle velocity ~v i, that is:
Rð~v iÞ ¼~v i ~v i P 0;
0 ~v i < 0:
�ð11Þ
Expression (10) implies that when the vehicle movesfaster in the message dissemination direction, a will be lar-ger and the weight of the distance in Eq. (4) dominates,
MessageHead 1
MessageHead 2
MessageHead n
MessageHolder i
MessageHolder j
MessageHolder i
MessageHolder j
MessageHolder i
MessageHolder j
Message Forwarding
Message ACK
Possible State Transfer
Fig. 5. Illustration of message dissem
since it is easier for the faster vehicle to ferry the messageto its heading clusters. Also, when the vehicle has moreneighbors, the weight of the distance in Eq. (4) dominates,which makes our scheme similar to the traditional greedyalgorithm. Meanwhile, e is related to the traffic density kD.Since the larger kD is, the more neighbors there will be andthe smaller the probability is to hold the message. Hence, ecan be set as:
e / 11� e�kDR
ð12Þ
Furthermore, T, T0, t1, t2 and t3 need to be estimated lo-cally and dynamically by individual vehicles based on thevehicular traffic scenario around current message head.
4.1. Time parameter design
In Eq. (3), T reflects the urgency of the message. Consid-ering the delay requirement and the possible collision inMAC layer, T is estimated by the following equation.
T ¼ r� CWmax
Uð13Þ
Here, r is the time slot size, which can be 50 ls accord-ing to 802.11 [39]. CWmax is the maximum value of conten-tion window and it can be 1024 based on 802.11. U is thepriority of the message. The priority of the message can bedefined based on the message type as shown in Table 2.
With suitable r and CWmax in Eq. (13), it can be guaran-teed that the message will be successfully forwarded bythe new message head within acceptable latency.
To design other time parameters, it is desired to obtainsome statistical vehicular traffic information around cur-rent message head, such as the average inter-cluster dis-tance and average intra-cluster distance. Here, we willutilize the extended car following model [36,38], which iswidely used to adapt the following car’s mobility to keepsafety distance between adjacent cars. The details of thismodel are clearly elaborated in Appendix A. In addition,the exponential distribution [37] is used to describe the in-ter-arrival time of vehicles in this paper. The spacing distri-butions of vehicles are given in Appendix B.
As shown in Fig. 6, in order to cross the partition, one ofthe methods is to use the clusters moving in the oppositedirection to ferry the message. To forward the message to
MessageHead n+1
MessageDestination
MessageDestination
MessageHead N
MessageDestination
MessageDestination
Destination Area
ination to the destination area.

Table 2Message priority.
Priority (U) Type Examples
1 General Commercial information2 Warning Road work notification3 Accident Sensing an accident
interDev
wv
Fig. 6. Illustration of crossing the partition to another cluster.
Fig. 7. Illustration of failure processing for the message head.
ev
wv
intraD
Fig. 8. Illustration of designing time parameter t2.
C. Liu, C. Chigan / Ad Hoc Networks 10 (2012) 497–511 503
the oncoming vehicles as soon as possible, the messagehead will broadcast it with an interval T0. Thus, T0 shouldbe as small as possible. However, due to limited availablenetwork resource and the traffic characteristic, T0 can beset as a suitable value to satisfy the requirement of latencyas well as to save the network resource. So T0 is set as thefollowing expression.
T 0 ¼ Dinter � Rve þ vw
ð14Þ
where ve and vw are the average vehicle speed in two direc-tions respectively. Dinter is the inter-cluster distance be-tween two clusters. Assuming ve and vw to be constant,from Eq. (14), it can be achieved that
EðT 0Þ ¼ EðDinterÞ � Rve þ vw
ð15Þ
Based on Eq. (B.6), the expected value of interval T0 is
EðT 0Þ ¼ 1kDðve þ vwÞ
ð16Þ
Here, kD (veh/m) is the local vehicle traffic density aroundthe message head.
In the forwarding process, if the message head comesupon some fault to disseminate the message, as shown inFig. 7, the message holders, whose moving direction isthe same as the message dissemination direction, will re-sume another contention to forward the message after cer-tain time period t1. Obviously, t1 > T0. Therefore,considering the partition crossing and available networkresource, it is set as
t1 ¼ T 0 þ rðT 0Þ ð17Þ
where r(T0) is the standard deviation of the interval T0 andit is the square root of its variance Var(T0). According to Eq.(14), we can calculate Var(T0) as
VarðT 0Þ ¼ 1
ðve þ vwÞ2� VarðDinterÞ ð18Þ
Based on Eqs. (B.7) and (18), the expected value of t1 is
Eðt1Þ ¼ EðT 0Þ þ rðT 0Þ ¼ 2kDðve þ vwÞ
ð19Þ
In addition, as discussed in the above section, if themessage holders, whose moving direction is different fromthe message dissemination direction, run out of messagehead range and do not receive the explicit/implicit ACKwithin a certain time period t2, they will drop the message.As shown in Fig. 8, the expected value of t2 can be ex-pressed by
Eðt2Þ ¼R� EðDintraÞ
ve þ vwð20Þ
where Dintra is the intra-cluster distance between two adja-cent vehicles. Substituting Eq. (B.9), the expected value oft2 is
Eðt2Þ ¼1
ve þ vw� R
1� e�kDR� 1
kD
� �ð21Þ
Similarly, if the message holder, whose moving direc-tion is the same as the message dissemination direction,encounters some fault to receive the expected explicitACK after a certain time period t3, it will implement thefailure processing. As shown in Fig. 9, it is clear that, withint3, vehicle A needs to wait two contention phases, whenvehicle C and F win the contention respectively. Moreover,vehicle A also needs to wait another time period t1 when itcan make sure that there will be no fault for the messagehead. Therefore, t3 should satisfy that
t3 P 2T þ t1 ð22Þ
Thus, the expected value of t3 can be set as
Eðt3Þ ¼ 3T þ Eðt1Þ ð23Þ
By Eqs. (13) and (19), the value of E(t3) can be achieved.Therefore, the algorithm parameters and the time
parameters are designed effectively, which will make ourproposed protocol RPB-MD applicable and operable inthe real traffic scenario.
4.2. Feasibility of RPB-MD
To show the operability of our proposed scheme, thefeasibility of time parameters in our protocol design willbe examined here. In addition, we will analyze the sensi-tivity of traffic density accuracy, relative distance accuracyand packet duplication, which may affect the implementa-

A B
C
D
E
F
ACKACK
Fig. 9. Illustration of failure processing for message holder.
Fig. 11. Expected value of time parameters under different traffic density.
504 C. Liu, C. Chigan / Ad Hoc Networks 10 (2012) 497–511
tion of RPB-MD. Besides, the extension of RPB-MD to 2-Dscenarios will be discussed.
4.2.1. Feasibility of time parametersIn the contention period, the delay Ti is initiated to win
the contention and forward the message. However, whenthe traffic is dense enough such that the network is con-nected, Ti is the only delay introduced before next forward.As shown in Fig. 10, when the traffic density is more than0.02 veh/m�lane (assuming the number of lanes is 2/direc-tion), the average Ti will be less than 0.1T (when T is set to50 ms, it is only 5 ms).
When T is set to be 50 ms and the average velocity is90 km/h, the expected value of all other time parameters,E(T0), E(t1), E(t2) and E(t3), are shown in Fig. 11. Thus, asthe traffic density increases, the values of E(T0), E(t1) andE(t3) will decrease. That is, when there is a network parti-tion, in order to provide the robust message dissemination,RPB-MD can dynamically adjust its parameters accordingto different traffic scenarios. When it is necessary to imple-ment the failure processing, the smaller the values of thetime parameters E(t1) and E(t3) are, the faster RPB-MDcan deal with the failure mode. Meanwhile, smaller valueof E(T0) means that the message can be forwarded to theheading clusters as soon as possible. Besides, as the trafficdensity increases, the value of E(t2) will not increase signif-icantly, which can ensure acceptable overhead.
Therefore, based on the message attributes and localvehicular traffic information, RPB-MD can adjust the timeparameters adaptively. Furthermore, all the informationneeded to design the time parameters is the local vehiculartraffic density and average speed, which can be acquired byreceiving the neighbors’ beacons [31]. Hence, it will not in-crease the protocol complexity but provide more flexibilityand intelligence according to different vehicular trafficscenarios.
4.2.2. Sensitivity analysis of traffic density accuracyIn the section above, it is assumed that, by receiving the
neighbors’ beacons, the vehicles can achieve precise localtraffic density kD.
Fig. 10. Average delay before next forward under different traffic density.
However, due to the communication network collisions,the vehicle may not attain kD with 100% accuracy. There-fore, it is necessary to analyze its influence on the timeparameters if the vehicle only can estimate kD with certainaccuracy (e.g., 80%).
For the design of T0, it is necessary to ensure that themessage head forward the message to the on-coming vehi-cle as soon as it runs into the communication range of themessage head. Here, we will analyze the distance d0 be-tween the message head and the nearest on-coming vehi-cle after T0. It can be obtained that
d0 ¼ EðDinterÞ � EðT 0Þ � ðve þ vwÞ ¼ R ð24Þ
According to our design, the expected value of d0 shouldbe R. From Eq. (24), it shows that kD will not affect the dis-tance d0 after T0. Therefore, it can be assured that the designof T0 is not sensitive to the traffic density accuracy.
The design goal of t1 is to ensure that the on-comingcluster will run into the communication range of the cur-rent cluster when the message holders resume anothercontention to forward the message after t1. The distanced01 between the two clusters after t1 is shown as:
d01 ¼ EðDinterÞ � Eðt1Þ � ðve þ vwÞ ¼ R� 1kD
ð25Þ
Based on our design, the expected value of d01 shouldsatisfy that d01 < R. From Eq. (25), obviously d01 < R. So theaccuracy of traffic density will not affect the design of timeparameters t1.
The design goal of t2 is to ensure that the message hold-ers will drop the message only if they are out of the com-munication range of the message head after t2. Thedistance d02 between the nearest message holder, whosemoving direction is different from the message dissemina-tion direction, and the message head after t2 is shown as:
d02 ¼ EðDintraÞ þ Eðt2Þ � ðve þ vwÞ ¼ R ð26Þ
In our protocol design, it is necessary to make sured02 P R. From Eq. (26), the accuracy of kD does not affectthe condition of d02 at all. Therefore, the design of t2 is ro-bust to the accuracy of traffic density.
For the design of t3, because the faulted messageholder’s moving direction is the same as the message dis-semination direction, there will always be some messageholders (the old message head or other holders) in therange of the faulted message holder. In addition, the

C. Liu, C. Chigan / Ad Hoc Networks 10 (2012) 497–511 505
faulted message holder just needs to receive the expectedexplicit ACK. Therefore, even there are some errors for kD,the failure processing will be properly implemented tosend the explicit ACK to the faulted message holder.
Based on the analysis above, it is clear that, even if only80% accuracy for the vehicle traffic density, RPB-MD stillcan achieve efficiency and robustness based on the timeparameter design.
4.2.3. Sensitivity analysis of relative distance accuracyIn position-based routing, the location errors will lead
to problems of transmission failures [40]. Recently, the glo-bal positioning system (GPS) is widely used to localizevehicles. Due to its inherent inaccuracy, GPS measure-ments will have certain amount of inaccuracy dependingon the environment and systems. Since RPB-MD is a con-tention-based and receiver-centric forwarding protocol, itdoes not set up and maintain neighbor tables. Thus RPB-MD will not suffer the problem of transmission failuresdue to location errors.
Although it is not necessary to consider the movementof destination vehicles when RPB addressing model is usedto define the destination area, the accuracy of relative dis-tance from each hop will affect the total relative distancebased on Eq. (2) because of the accumulative errors. Theaccumulative errors can be modeled as follow:
W ¼XN
k¼1
Wk ð27Þ
where W is the total accumulative error, Wk represents themeasurement error of hop k, and N is the number of hopsfrom the source node to the last node in the destinationarea. Assuming the distance error at each node can bemodeled by a Gaussian distribution with zero mean and fi-nite standard deviation, and the distance errors at differentnodes are independent, the expected value of W, E(W) willbe equal to 0. This means that the average total accumula-tive error will be 0 and it will not affect the RPB addressingmodel very much. However, for a given environment, thedistance error at a single node could be non-zero and thereal total accumulative error may be not 0. Some tech-niques can be implemented to mitigate the influence ofaccumulative error. One way is to attach an error informa-tion field in the message header and announce the statisti-cal characteristics of the distance error to the nextforwarder with the information of relative distance. Thenthe last message head will get all the statistical character-istics of distance errors and estimate the total accumula-tive error.
4.2.4. Sensitivity analysis of packet duplicationEssentially, DGBR is a contention-based forwarding
(CBF) mechanism, and it does not require the knowledgeof local and global network topology. In the contentionperiod, each of the nodes receiving the message will runits own timer. If the timer of a vehicle expires firstly, thevehicle can assume it is the new message head and broad-casts the packet, and others will cancel their timers and bethe message holders. However, the CBF scheme may sufferthe problem of packet duplication [35]. For example,
according to Eq. (3), if the best suitable vehicle V1 has atime period of T1 and there exists at least another vehicleV2 with a time period of T2 such that
T2 � T1 < d ð28Þ
where d is the minimum time interval needed for packetsuppression, there will be at least one packet duplication.That is, only after time period d, V2 can detect this messageand cancel its timer to contend the broadcast. Otherwise,the routing layer of V2 will consider it has won the conten-tion to be the new message head and send the packetduplication to the MAC layer and broadcast to othervehicles.
However, in the environment of middle and sparse traf-fic density, the number of neighbors around one vehiclewill not be very large and it will not cause a number ofpacket duplications. In [35], the authors showed that theaverage number of responses in d is about 2 when thenumber of neighbors is 16 and d is 0.1T. When the numberof neighbors is 64 and d is 0.1T, the average number of re-sponses in d is about 4. Therefore, even in the dense trafficenvironment, the number of packet duplication will bevery limited. When packet duplication occurs, becauseany other nodes may detect the duplication when theyhave received the same packet several times, it will onlyaffect the nodes whose timers are in d with the new mes-sage head. To solve this problem, one way is to make theold message head, when it has detected the packet duplica-tion(s), immediately send a DUP (duplication detection)packet to the node(s) who broadcasted the duplicatedpacket(s). In this way, it can inform the node(s) with thesituation of packet duplication. In another way to preventall packet duplications, the receivers will send the RTB (re-quest-to-broadcast) packets to the old message headaccording to Eq. (3). When the old message head has re-ceived the first RTB from one node, it will send the CTB(clear-to-broadcast) packet to this node and assign it tobe the new message head. This method is similar to theRTS/CTS scheme and it can prevent all kinds of packetduplications at the price of extra communication overhead.
4.2.5. Extension to 2-D scenarioAs discussed above, RPB-MD is feasible in 1-D scenarios.
To enhance its applicability, now we extend RPB-MD into2-D scenarios.
As shown in Fig. 12, the road from the source node S tothe destination node D is curving. The message dissemina-tion direction of the source node S is u and its total relativedistance to the destination is R
!t . The driving direction of
the source node S is h. When the source node transmitsthe message to the next hop node A, the DGBR mechanismcan be adopted to ensure that the message will be reliablydisseminated to the next hop. However, the total relativedistance R
!t and message dissemination direction u should
be updated differently from Eq. (2). After contending to bethe new message head, node A, whose relative distance toS is R
!i, will update its total relative distance R
!u and new
dissemination direction u0 as the following equations.
R!
u ¼ R!
t � R!
i � cos h ð29Þ

Ri
Rt
Ru
ϕ ′
ϕθ
Fig. 12. Update of dissemination distance and direction on curving road.
Table 3Simulation Parameters.
Parameter Value
MAC IEEE 802.11Date rate 2 MbpsPropagation model TwoRayGroundCommunication Range 300 mNumber of lanes 2/directionVehicle density 0.005–0.05 veh/m�laneAverage speed 90 km/hData sending rate 0.1–1 packet/s
506 C. Liu, C. Chigan / Ad Hoc Networks 10 (2012) 497–511
u0 ¼ arctanR!
t � tan u� R!
i � sin h
R!
t � R!
i � cos h
0@
1A ð30Þ
When in the city environment, two steps of the routingprotocol should be considered: (1) routing in the road seg-ment; (2) routing in the intersection. When routing in theroad segment, our proposed RPB-MD, together with theextension of 2-D scenario on the curving road, can ensurehigh reliability. When routing in the intersection, one sim-ple approach is to select the road segment with the short-est distance from the intersection to the destination.However, the efficiency and reliability of message dissem-ination along a road depends largely on the vehicle traffic(or VANET connectivity) on the road. Thus, to achieve effi-ciency and robustness, both the road distance and trafficcondition must be considered to select the road segmentwhen routing in the intersection. In the future, the issueof how to select the road segment reflecting dynamic traf-fic condition, when the message is disseminated in theintersection, will be researched by considering the roaddistance and real-time traffic information.
Therefore, with future extension, RPB-MD will be appli-cable for both highway scenarios and city environmentscenarios. Also, based on the time parameter design andfeasibility analysis, RPB-MD is robust to ensure reliablemessage dissemination in VANETs, even though these timeparameters are sensitive to traffic density accuracy, rela-tive distance accuracy and packet duplication.
5. Performance evaluation
5.1. Simulation settings
For the simulation, we use version 3.31 of ns-2 simula-tor [41], and the mobility trace of vehicles is generated byMOVE [42]. The parameters of the simulation are shown inTable 3. Our simulation models a straight 12 km long bidi-rectional highway with 2 lanes per direction (simulationsin the 2-D scenarios will be conducted in our future work).The average vehicle density in the highway is varied from0.005–0.05 veh/m�lane on all lanes, and the average speedof the vehicles is 90 km/h. We implement a workload of100 multicasts, each of which will send a message from arandomly chosen source to a randomly chosen road seg-ment. Here, the randomly generated UDP based constantbit rate (CBR) traffic is used for simulation. To evaluatethe performance with different data sending rate, thenodes will generate the packets at the rate of 0.1–1 pack-
et/s. The average distance from the source to the destina-tion area edge is about 6.5 km. The radio range is set to300 m. The MAC protocol is 802.11 with data rate of2 Mbps. The propagation model implemented in our simu-lation is the TwoRayGround model [43].
5.2. Simulation results and evaluation
The simulation experiments are conducted using fourprotocols: epidemic routing mechanism [44], GPSR [45],IVG [24] and our proposed RPB-MD protocol. The reasonwe choose the epidemic routing for comparison is due toits performance of high delivery ratio. Since GPSR is a uni-cast protocol and it is not proposed for VANET, for faircomparison, we implement buffers for GPSR, and adoptthe broadcast mechanism when the message is transmit-ted to the destination region. IVG is a multicast protocolto disseminate the message to nodes in a specific area.The following metrics are used to compare theperformance.
� Data Delivery Ratio: the ratio of the number of datapackets received at the destinations to the number ofdata packets sent by the sources.� Data Overhead: the ratio of the number of data packets
transmitted by all nodes to the number of data packetsreceived at the destinations.� Average Delay: the end-to-end delay averaged over all
delivered data packets for each source/destinationspair.� Network Reachability: the ratio of vehicles that receive
the message to all the vehicles in ZoR.
5.2.1. The impact of traffic densityAs we discussed above, the vehicular traffic density will
significantly affect the network connectivity. In addition, itis necessary to evaluate the network scalability and band-width efficiency in different vehicular traffic density.Therefore, the protocol performance by varying traffic den-sity is studied here.
Fig. 13 shows the data delivery ratio of the epidemicrouting, GPSR, IVG and RPB-MD protocols under differentvehicle density scenarios. The results indicate that four ofthe schemes can achieve very high delivery ratios (morethan 85%) for all the traffic density, and IVG and the epi-demic routing almost have the same delivery ratio. Be-cause GPSR may result in the void area when the vehicledensity is low, its delivery ratio is not very high. However,

Fig. 13. Data delivery ratio as a function of traffic density.Fig. 15. Data delay as a function of traffic density.
C. Liu, C. Chigan / Ad Hoc Networks 10 (2012) 497–511 507
due to the collisions in MAC layer, epidemic routing andIVG underperform RPB-MD when the vehicle density ismore than 0.01 veh/m. We can see that RPB-MD can stea-dily hold very high delivery ratio at different vehicle densi-ties. Fig. 14 shows the data overhead in GPSR, epidemicrouting, IVG and RPB-MD. With the epidemic routing,when the vehicle traffic density increases, more and morecopies of the message will be transmitted in the network.However, by RPB-MD, only the message head will broad-cast the message, which can ensure steady and limitedoverhead when the traffic density increases. Meanwhile,GPSR always selects only one node for its next hop, so itwill lead to similar overhead as RPB-MD if we do not countthe beacon messages exchanged in neighborhoods.
For the average delay, as shown in Fig. 15, when thetraffic density increases, the RPB-MD can achieve almostthe same performance as that of epidemic routing. Whenthe density is low, the message forwarder must implementthe strategy of carrying and forwarding to cross the parti-tioning, which leads to several seconds delay. As the trafficdensity increases, there will be more collisions in the linklayer, which leads to more delay for epidemic routing.When the traffic density is more than 0.02 veh/m, RPB-MD and IVG have almost the same delay due to the con-nected network. To create and maintain the updatedneighbor lists, GPSR will result in even more delay thanothers. As shown in Fig. 16, RPB-MD can always keep veryhigh network reachability, more than 98%, which is higherthan that of others. This is because that RPB-MD will adap-tively adjust its parameters according to different traffic
Fig. 14. Data overhead as a function of traffic density.
scenario. However, due to the unreliability to the networkcollisions, the network reachability of IVG, epidemic rout-ing and GPSR is sensitive to the traffic density.
Under different traffic density, the performance of datadelivery ratio, data overhead and network reachability forRPB-MD outperforms that of the, GPRS, epidemic routingand IVG. Moreover, RPB-MD and IVG almost have the sameperformance with respect to the data delivery delay.
5.2.2. The impact of data sending rateTo achieve high throughput, the network needs to
transmit data packets as many as possible. Therefore, it isnecessary to evaluate the network performance by varyingthe data sending rate. Here, the data sending rate is variedfrom 0.1 to 1 packet/s (the traffic density is set to 0.02 veh/m).
Fig. 17 shows the different data delivery ratio for RPB-MD, GPSR, IVG and epidemic routing when the data send-ing rate is varied. When data sending rate increases, thenetwork traffic increases linearly. For epidemic routing,IVG and GPSR, there are more collisions than that of RPB-MD. Therefore, the data delivery ratio of epidemic routing,IVG and GPSR decreases faster than that of RPB-MD whendata sending rate increases. Fig. 18 shows the data over-head as a function of data sending rate for RPB-MD, GPSR,IVG and epidemic routing. With the increase of data send-ing rate, the overhead of RPB-MD, IVG and GPSR increasesa little. However, much more data packets will be sent bythe epidemic routing. Thus, the performance of overheadfor RPB-MD greatly surpasses that of epidemic routing.
Fig. 16. Network reachability as a function of traffic density.
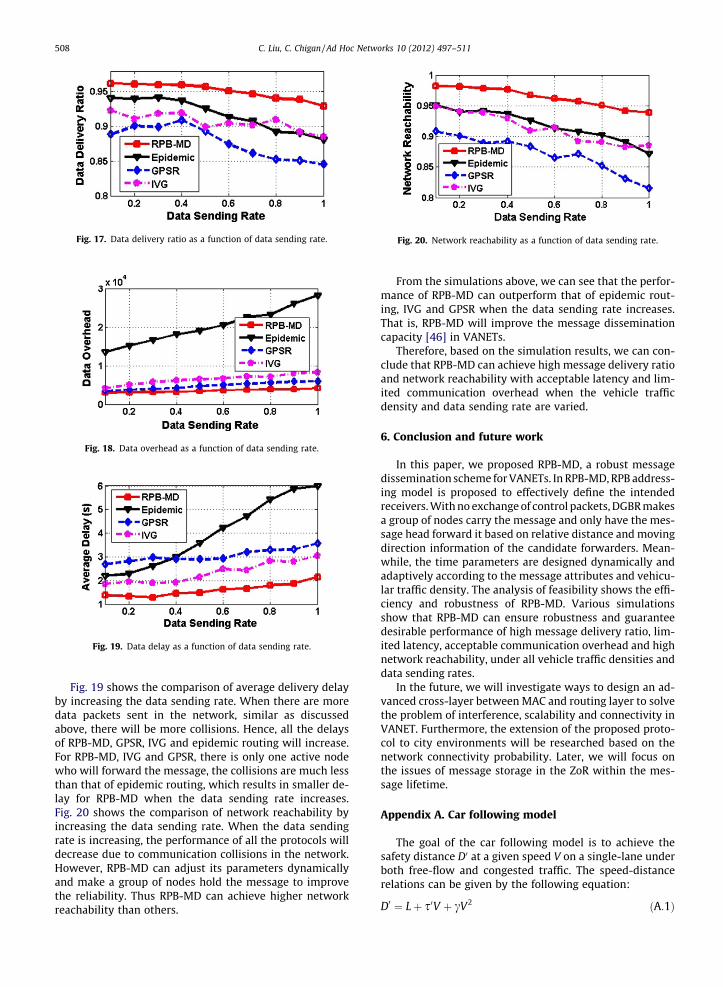
Fig. 17. Data delivery ratio as a function of data sending rate.
Fig. 18. Data overhead as a function of data sending rate.
Fig. 19. Data delay as a function of data sending rate.
Fig. 20. Network reachability as a function of data sending rate.
508 C. Liu, C. Chigan / Ad Hoc Networks 10 (2012) 497–511
Fig. 19 shows the comparison of average delivery delayby increasing the data sending rate. When there are moredata packets sent in the network, similar as discussedabove, there will be more collisions. Hence, all the delaysof RPB-MD, GPSR, IVG and epidemic routing will increase.For RPB-MD, IVG and GPSR, there is only one active nodewho will forward the message, the collisions are much lessthan that of epidemic routing, which results in smaller de-lay for RPB-MD when the data sending rate increases.Fig. 20 shows the comparison of network reachability byincreasing the data sending rate. When the data sendingrate is increasing, the performance of all the protocols willdecrease due to communication collisions in the network.However, RPB-MD can adjust its parameters dynamicallyand make a group of nodes hold the message to improvethe reliability. Thus RPB-MD can achieve higher networkreachability than others.
From the simulations above, we can see that the perfor-mance of RPB-MD can outperform that of epidemic rout-ing, IVG and GPSR when the data sending rate increases.That is, RPB-MD will improve the message disseminationcapacity [46] in VANETs.
Therefore, based on the simulation results, we can con-clude that RPB-MD can achieve high message delivery ratioand network reachability with acceptable latency and lim-ited communication overhead when the vehicle trafficdensity and data sending rate are varied.
6. Conclusion and future work
In this paper, we proposed RPB-MD, a robust messagedissemination scheme for VANETs. In RPB-MD, RPB address-ing model is proposed to effectively define the intendedreceivers. With no exchange of control packets, DGBR makesa group of nodes carry the message and only have the mes-sage head forward it based on relative distance and movingdirection information of the candidate forwarders. Mean-while, the time parameters are designed dynamically andadaptively according to the message attributes and vehicu-lar traffic density. The analysis of feasibility shows the effi-ciency and robustness of RPB-MD. Various simulationsshow that RPB-MD can ensure robustness and guaranteedesirable performance of high message delivery ratio, lim-ited latency, acceptable communication overhead and highnetwork reachability, under all vehicle traffic densities anddata sending rates.
In the future, we will investigate ways to design an ad-vanced cross-layer between MAC and routing layer to solvethe problem of interference, scalability and connectivity inVANET. Furthermore, the extension of the proposed proto-col to city environments will be researched based on thenetwork connectivity probability. Later, we will focus onthe issues of message storage in the ZoR within the mes-sage lifetime.
Appendix A. Car following model
The goal of the car following model is to achieve thesafety distance D0 at a given speed V on a single-lane underboth free-flow and congested traffic. The speed-distancerelations can be given by the following equation:
D0 ¼ Lþ s0V þ cV2 ðA:1Þ

D′
L Vτ ′ 2Vγ
Fig. 21. Car following model.
1D′ 2D′
D′1D 2D
3D 4D
Fig. 22. Comparison of single-lane and multi-lane model.
interD
R
Fig. 23. Illustration of being the first vehicle in a cluster.
C. Liu, C. Chigan / Ad Hoc Networks 10 (2012) 497–511 509
Here, as shown in the Fig. 21, D0 is the safety distancebetween rear bumper and rear bumper, and L is the effec-tive vehicle length. s0 is the driver’s reaction time. c is acoefficient, which can be represented by
c ¼ 12� 1
af� 1
al
� �ðA:2Þ
Here, af and al are the average maximum decelerationsof the following and leading vehicles respectively. In Eq.(A.1), the third term cV2 can ensure sufficient distance suchthat the following vehicle can have sufficient spacing tocome to a complete stop without collision. If assuming thateach vehicle has similar braking performance, that isaf � al, then c � 0. So Eq. (A.1) can be simplified as:
D0 ¼ Lþ s0V ðA:3Þ
However, the car following model based on Eqs. (A.1)and (A.3) is restrained to a single lane. This single-lanemodel has some limitations to be applied by the VANETscommunication. Since, when the network connectivity isconsidered, the forwarding vehicle can rely on others inthe range on a multi-lane road no matter whether theyare on the same lane or not. Therefore, the single-lanecar following model is extended to the multi-lane model,which can be illustrated in Fig. 22.
Furthermore, in the light and moderate traffic, insteadof the driver reaction time (s0), the inter-arrival time (s)of vehicles can be used in Eq. (A.3) to describe the headwaydistance (D). Hence, the multi-lane car-following modelcan be modeled as
D ¼ Lþ sV ðA:4Þ
The effective vehicle length L is usually very small com-pared to a typical VANET transmission range. So, L can beignored and Eq. (A.4) can be simplified as
D ¼ sV ðA:5Þ
intraD
Appendix B. Spacing distribution
Using the exponential distribution, the distribution ofthe inter-arrival time s can be presented as below.
f ðs; ktÞ ¼ kt � e�kts ðB:1Þ
Here, kt (veh/s) is the traffic flow and can be achieved byreceiving the neighbors’ beacons [31] in the vehicle.
Based on Eqs. (A.5) and (B.1), if assuming the vehiclevelocity is constant, the distribution of inter-vehicle dis-tance for the multi-lane car following model is given by
f ðD; kDÞ ¼ kD � e�kDD ðB:2Þ
Here, kD (veh/m) is the traffic density and it can beapproximately derived by the following equation
kD ¼kt
VðB:3Þ
where V is the average speed of vehicles in m/s.Here, it is necessary to analyze the separation probabil-
ity (PS) of the clusters. That is, PS is the probability thatthere are no following or leading vehicles in the communi-cation range R of the last or first vehicle in the cluster,which can be illustrated in Fig. 23. Based on the distribu-tion of inter-vehicle distance, PS can be calculated as:
PS ¼ prðD > RÞ ¼ 1� prðD 6 RÞ
¼ 1�Z R
0f ðD; kDÞdD ¼ e�kDR ðB:4Þ
The inter-cluster distance Dinter, as shown in Fig. 23, isthe space between the first vehicle of the following clusterand the last vehicle of the leading cluster. Obviously, Dinter
should be larger than R. Based on the probability PS, thedistribution of inter-cluster distance Dinter can be given by
fDinterðDinterÞ ¼ prðDjD > RÞ ¼ prðDÞ
prðD > RÞ¼ kDe�kDðDinter�RÞ ðB:5Þ
From Eq. (B.5), the average inter-cluster distance Dinter
can be expressed by
EðDinterÞ ¼Z þ1
RD � fDinter
ðDinterÞdD ¼ Rþ 1kD
ðB:6Þ
Based on the distribution of Dinter and its expected valueas in Eqs. (B.5) and (B.6), VarðDinterÞ can be achieved as
VarðDinterÞ ¼Z þ1
R½D� EðDinterÞ�2 � kDe�kDðDinter�RÞdD ¼ 1
k2D
ðB:7Þ
Fig. 24. Illustration of the intra-cluster distance.

510 C. Liu, C. Chigan / Ad Hoc Networks 10 (2012) 497–511
The intra-cluster distance Dintra, which is the distancebetween two adjacent vehicles, is shown in Fig. 24. Similarto Dinter, the distribution of Dintra can be expressed as
fDintraðDintraÞ ¼ prðDjD 6 RÞ ¼ prðDÞ
prðD 6 RÞ ¼kDe�kDDintra
1� e�kDRðB:8Þ
From the Eq. (B.8), the expected value of the intra-clus-ter distance Dintra can be calculated as
EðDintraÞ ¼Z R
0D � fDintra
ðDintraÞdD ¼ 1kD� R � e�kDR
1� e�kDRðB:9Þ
References
[1] W. Kiess, M. Mauve, A survey on real-world implementations ofmobile ad-hoc networks, Ad Hoc Networks 5 (3) (2007) 324–339.
[2] Vehicle Safety Communications Project-Final Report, Tech. Report,DOT HS 810 591, USDOT, April 2006.
[3] R. Resendes, IntelliDrive: Vehicle-to-vehicle communications forsafety, in: USDOT Presentations at the ITS America Annual Meeting2010, May 2010.
[4] http://www.intellidriveusa.org/ (accessed 08.04.10).[5] http://www.geonet-project.eu/ (accessed 08.04.10).[6] http://www.cvisproject.org/ (accessed 08.04.10).[7] http://www.prevent-ip.org/en/home.htm (accessed 08.04.10).[8] http://www.network-on-wheels.de (accessed 08.04.10).[9] C. Perkins, E. Belding-Royer, S. Das, Ad hoc on-demand distance
vector (AODV) routing, Network Working Group, RFC 3561, July2003.
[10] D.B. Johnson, D.A. Maltz, Y.-C. Hu, The dynamic source routingprotocol for mobile ad hoc networks (DSR), IETF MANET WorkingGroup, Internet Draft, July 2004.
[11] W. Zhao, M. Ammar, E. Zegura, A message ferrying approach for datadelivery in sparse mobile ad hoc networks, in: Proc. of ACM Int.Symp. on Mobile Ad Hoc Network and Comput. (MOBIHOC), 2004.
[12] L. Briesemeister, L. Schafers, G. Hommel, Disseminating messagesamong highly mobile hosts based on inter-vehicle communication,in: Proc.of IEEE Intelligent Vehicles Symposium, October 2000.
[13] C. Perkins, Highly dynamic destination-sequenced distance-vectorrouting (DSDV) for mobile computers, in: Proc. of ACM SIGCOMM,August 1994.
[14] F. Stann, J. Heidemann, R. Shroff, M. Murtaza, RBP: Reliable broadcastpropagation in wireless networks, Technical Report ISI-TR-2005-608, USC Information Sciences Institute, November 2005.
[15] Y. Ko, N. Vaidya, Location-aided routing (LAR) in mobile ad hocnetworks, in: Proc. of IEEE/ACM MobiCom, 1998.
[16] N. Wisitpongphan, O. Tonguz, J. Parikh, P. Mudalige, F. Bai, V.Sadekar, Broadcast storm mitigation techniques in vehicular ad hocnetworks, IEEE Wireless Communications 14 (6) (2007) 84–94.
[17] C. Lochert, M. Mauve, H. Fler, H. Hartenstein, Geographic routing incity scenarios (poster), MobiCom 2004, ACM SIGMOBILE MobileComputing and Communications Review (MC2R) 9 (1) (2005) 69–72.
[18] V. Naumov, T. Gross, Connectivity-aware routing (CAR) in vehicularad hoc networks, in: Proc. of IEEE International Conference onComputer Communications (INFOCOM’07), May 2007.
[19] H. Wu, R. Fujimoto, R. Guensler, M. Hunter, MDDV: A mobility-centric data dissemination algorithm for vehicular networks, in:Proc. of ACM VANET, 2004.
[20] J. Zhao, G. Cao, VADD: Vehicle-assisted data delivery in vehicular ad hocnetworks, IEEE Transactions on Vehicular Technology 57 (3) (2008).
[21] M. Nekovee, B. Bogason, Reliable and efficient informationdissemination in intermittently connected vehicular adhocnetworks., in: Proc. of Vehicular Technology Conference, April 2007.
[22] J. Gong, C. Xu, J. Holle, Predictive directional greedy routing invehicular ad hoc networks, in: Proc. of 27th International Conferenceon Distributed Computing System Workshops (ICDCSW’07), 2007.
[23] F. Granelli, G. Boato, D. Kliazovich, MORA: A movement-based routingalgorithm for vehicle ad hoc networks, in: Proc. of IEEE Workshop onAutomotive Networking and Applications, December 2006.
[24] A. Bachir, A. Benslimane, A multicast protocol in ad hoc networksinter vehicle geocast, in: Proc. of IEEE Vehicular TechnologyConference, April 2003.
[25] Y. Chen, Y.W. Lina, S.L. Lee, A mobicast routing protocol for vehicularad hoc networks, ACM/Springer Mobile Networks and Applications(MONET) 15 (1) (2010) 20–35.
[26] P. Bucciol, F. Ridolfo, J. Martin, Multicast voice transmission overvehicular ad hoc networks: issues and challenges, in: Proc. ofSeventh International Conference on Networking (ICN 2008), 2008.
[27] H.P. Joshi, M. Sichitiu, M. Kihl, Distributed robust geocast multicastrouting for inter-vehicle communication, in: Proc. of WEIRDWorkshop on WiMax, Wireless and Mobility, May 2007.
[28] O.K. Tonguz, N. Wisitpongphan, F. Bai, DV-CAST: A distributedbroadcast protocol for VANETs, IEEE Wireless CommunicationsMagazine 17 (2) (2010) 47–56.
[29] H. Dai, K. Ng, R. Wong, M. Wu, On the capacity of multi-channelwireless networks using directional antennas, in: Proc. IEEEINFOCOM, 2008.
[30] T. Fukuhara, T. Warabino, T. Ohseki, K. Saito, K. Sugiyama, T. Nishida,K. Eguchi, Broadcast methods for inter-vehicle communicationssystem, in: Proc. of IEEE Wireless Communications and NetworkingConference, 2005.
[31] CAMP Vehicle Safety Communications Consortium, Vehicle safetycommunications project: task 3 final report: identify intelligentvehicle safety applications enabled by DSRC, National HighwayTraffic Safety Administration, US Department of Transportation,Washington DC, 2005.
[32] H. Hartenstein, B. Bochow, A. Ebner, M. Lott, M. Radimirsch, D.Vollmer, Position-aware ad hoc wireless networks for inter-vehiclecommunications: the fleetnet project, in: Proc. of the 2nd ACMInternational Symposium on Mobile Ad hoc Networking &Computing, October 2001.
[33] H. Zhou, S. Singh, Content based multicast (CBM) in ad hoc networks,in: Proc. of the 1st ACM International Symposium on Mobile and Ad-hoc Networking & Computing (MobiHOC), August 2000.
[34] R. Chen, D. Ma, A. Regan, TARI: Meeting delay requirements in vanetswith efficient authentication and revocation, in: 2nd InternationalConference on Wireless Access in Vehicular Environments (WAVE),December 2009.
[35] H. Füssler, J. Widmer, M. Käsemann, M. Mauve, H. Hartenstein,Contention-based forwarding for mobile ad-hoc networks, Ad HocNetworks Journal (Elsevier) 1 (4) (2003).
[36] M. Brackstone, M. McDonald, Car-following: a historical review,Transportation Research F 2 (4) (2000) 181–196.
[37] P. Chakroboty, A. Das, Principles of Transportation Engineering,Prentice-Hall of India Pvt. Ltd., Delhi, India, 2003.
[38] N. Wisitpongphan, F. Bai, P. Mudalige, V. Sadekar, O. Tonguz, Routingin sparse vehicular ad hoc wireless networks, IEEE Journal onSelected Areas in Communications 25 (8) (2007) 1538–1556.
[39] G. Bianchi, Performance Analysis of the IEEE 802.11 DistributedCoordination Function, IEEE Journal on Selected Areas inCommunications 18 (3) (2000) 535–547.
[40] R. Parker, S. Valaee, Vehicular node localization using received-signal-strength indicator, IEEE Transactions on VehicularTechnology 56 (6) (2007) 3371–3380 (part 1).
[41] The Network Simulator – ns2. <http://www.isi.edu/nsnam/ns/>(accessed 23.02.09).
[42] K. Lan, C. Chou, Realistic mobility models for vehicular ad hocnetwork (VANET) simulations, in: Proc. of 8th InternationalConference on ITS Telecommunications, 2008.
[43] T.S. Rappaport, Wireless Communications: Principles and Practice,Prentice Hall PTR, N.J., 2002.
[44] A. Vahdat, D. Becker, Epidemic Routing for Partially Connected AdHoc Networks, Technical Report CS-200006, 2000.
[45] B. Karp, H.T. Kung, Greedy perimeter stateless routing for wirelessnetworks, in: Proc. of the Sixth Annual ACM/IEEE InternationalConference on Mobile Computing and Networking (MobiCom 2000),August 2000.
[46] J. Zhao, Y. Zhang, G. Cao, Data pouring and buffering on the road: a newdata dissemination paradigm for vehicular ad hoc networks, IEEETransactions on Vehicular Technology 56 (6) (2007) 3266–3277.

C. Liu, C. Chigan / Ad Hoc Networks 10 (2012) 497–511 511
Congyi Liu is currently working on his PhDdegree under the supervision of Dr. ChunxiaoChigan, in Department of Electrical and Com-puter Engineering, Michigan TechnologicalUniversity. His research interests are focusedon data dissemination, data aggregation, datamining and their applications in vehicular adhoc networks. He received his M.S. degree inControl Theory and Control Engineering fromShanghai Jiao Tong University in China, and hejoined Michigan Tech University in September2007.
Chunxiao (Tricia) Chigan is presently anAssociate Professor of Electrical and ComputerEngineering at Michigan Tech. Her researchinterests include Vehicular Ad Hoc Networks,Wireless Ad Hoc and Sensor Networks, Wire-less Network Security, and Adaptive andSecure Protocol Design for Cognitive RadioNetworks. She has published more than 60Journal articles and conference papers inthese areas. Her research has been supportedby the US Army Research Laboratory (ARL),the US Army Communications-Electronics
Research Development and Engineering Center (CERDEC), the InnovationCenter of EATON Corporation, and the National Science Foundation (NSF).
Dr. Chigan received the MS and PhD degrees in Electrical Engineeringfrom the State University of New York, Stony Brook, in 2000 and 2002respectively. She is a past recipient of Michigan Tech Research ExcellentFund (REF) Award (2004), and the National Science Foundation CAREERAward (2007).