scheduling: exact methods€“ given the number of functional units of each type, minimize latency...
TRANSCRIPT

Scheduling: Exact Methods
ECE 5775 (Fall’17)High-Level Digital Design Automation
▸ Sign up for the first student-led discussions today– One slot remaining– Presenters for the 1st session will meet with instructor on
Tuesday 9/19– Form groups on CMS by tomorrow (9/15) 11:59pm
▸ HW 1 due tomorrow at 11:59pm
▸ Lab 2 to be released tomorrow
1
Announcements
2
Example: Basic Blocks and CFG
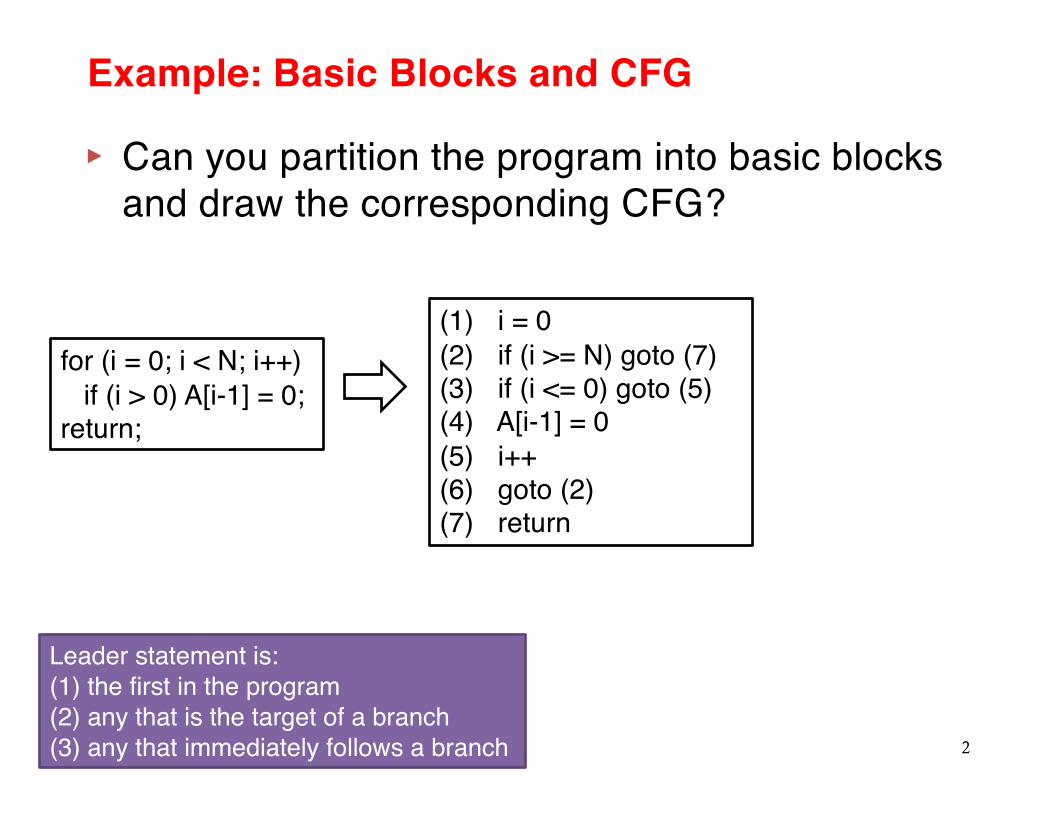
(1) i = 0(2) if (i >= N) goto (7)(3) if (i <= 0) goto (5)(4) A[i-1] = 0(5) i++(6) goto (2)(7) return
for (i = 0; i < N; i++)if (i > 0) A[i-1] = 0;
return;
▸ Can you partition the program into basic blocks and draw the corresponding CFG?
Leader statement is: (1) the first in the program(2) any that is the target of a branch (3) any that immediately follows a branch

3
Review: Dominator Tree and Dominance Frontier
B01234567
B0
B1
B2 B3
B4
B6
B7
B5
Dominance frontiersCFG
DF–1776671
For each convergence point X in the CFGFor each predecessor, Y, of X in the CFG
Run up to Z=IDOM(X) in the dominator tree,adding X to DF(N) for each N between [Y, Z)
Algorithm to compute DF set
B0
B1
B2 B3
B4B6
B5
B7
Dominator tree

4
Example: PHI Node Placement
X = …
X = …B0
B1
B2 B3
B4
B6
B7
B5
CFG
▸ X are defined in B0 and B4 in non-SSA form▸ Can you identify all the basic blocks where ϕ-nodes
need to be inserted for X in the SSA form?
B01234567
DF–1776671

▸ Unconstrained scheduling – ASAP and ALAP
▸ Constrained scheduling – Resource constrained scheduling (RCS)– Exact formulations with integer linear programming (ILP)
5
Agenda

High-level Programming Languages
(C/C++, OpenCL, SystemC, ...)
Parsing
Transformations
RTLgeneration
S0
S1
S2
S0
S1
S2
ab
z
d
3 cycles
*–
Control data flow graph (CDFG)
Finite state machines with datapath
BB3
BB1
BB2
BB4
T F
+
-
*+
*
if (condition) {…
} else {t1 = a + b;t2 = c * d;t3 = e + f;t4 = t1 * t2;z = t4 – t3;
}
Scheduling Binding
Allocation
Review: A Typical HLS Flow
6
Intermediate Representation (IR)

Scheduling in High-Level Synthesis
▸ Scheduling: a central problem in HLS– Introduce clock boundaries to untimed or partially timed input
specification– Significant impact on QoR
• Frequency• Latency• Throughput• Area• Power…
7

Scheduling: Untimed to Timed Latency Area Throughput
Untimed Combinational Sequential Pipelined
+
+
in1
+
out1
in2 in3 in4
+
+
in1
+
out1
in2 in3 in4
add
clk1
addclk
AAt1Td3t
*3/
1 ==
tclk ≈ dadd + dsetupT2 =1/ (3* tclk )A2 = Aadd + 2*Areg regadd
clk3
setupaddclk
AAAtT
ddt
*6*3/1
3 +==
+
+
+
in
+
out
3
2
1
4
3
2
1 2
1
( )in4in3,in2,in1,fout1=
in1
+
out1
in2 in3 in4
REG
8
Control-Data Flow Graph

▸ Control data flow graph (CDFG)– Generated by a compiler front end
from high-level description– Nodes
• Operations (and pseudo operations)– Directed edges
• Data edges, control edges, precedence edges
▸ Without control flow, the basic structure is a data flow graph (DFG)
9
Scheduling Input
xl = x+dx;ul = u-3*x*u*dx-3*y*dxyl = y+u*dxc = xl<a;x = xl; u = ul; y = yl;
+´´´´
´ ´ + <-
-
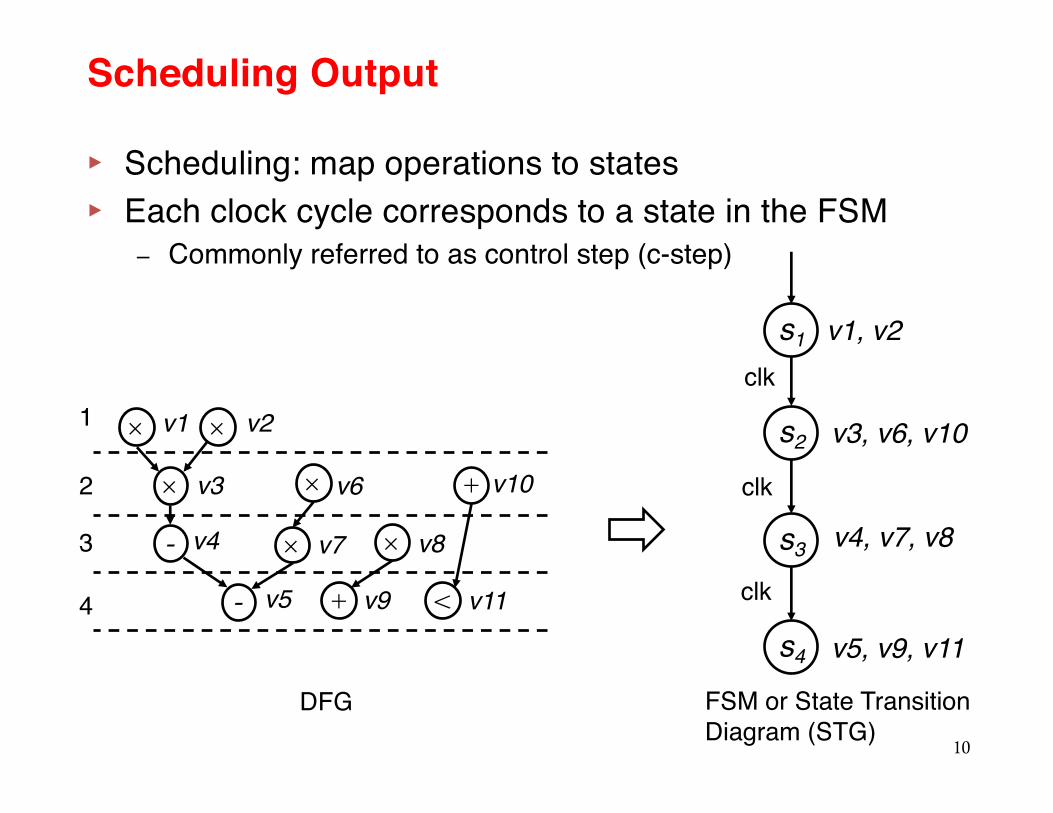
▸ Scheduling: map operations to states▸ Each clock cycle corresponds to a state in the FSM
– Commonly referred to as control step (c-step)
10
Scheduling Output
+
´
´
´´
´
´
+ <
-
-
1
2
3
4
v2v1
v3
v4
v5
v6
v7 v8
v9
v10
v11
s1
s2
s3
s4
v1, v2
v3, v6, v10
v4, v7, v8
v5, v9, v11
clk
clk
clk
DFG FSM or State Transition Diagram (STG)

▸ Only consideration: dependence
▸ As soon as possible (ASAP) – Schedule an operation to the earliest possible step
▸ As late as possible (ALAP)– Schedule an operation to the earliest possible step, without
increasing the total latency
11
Unconstrained Scheduling
12
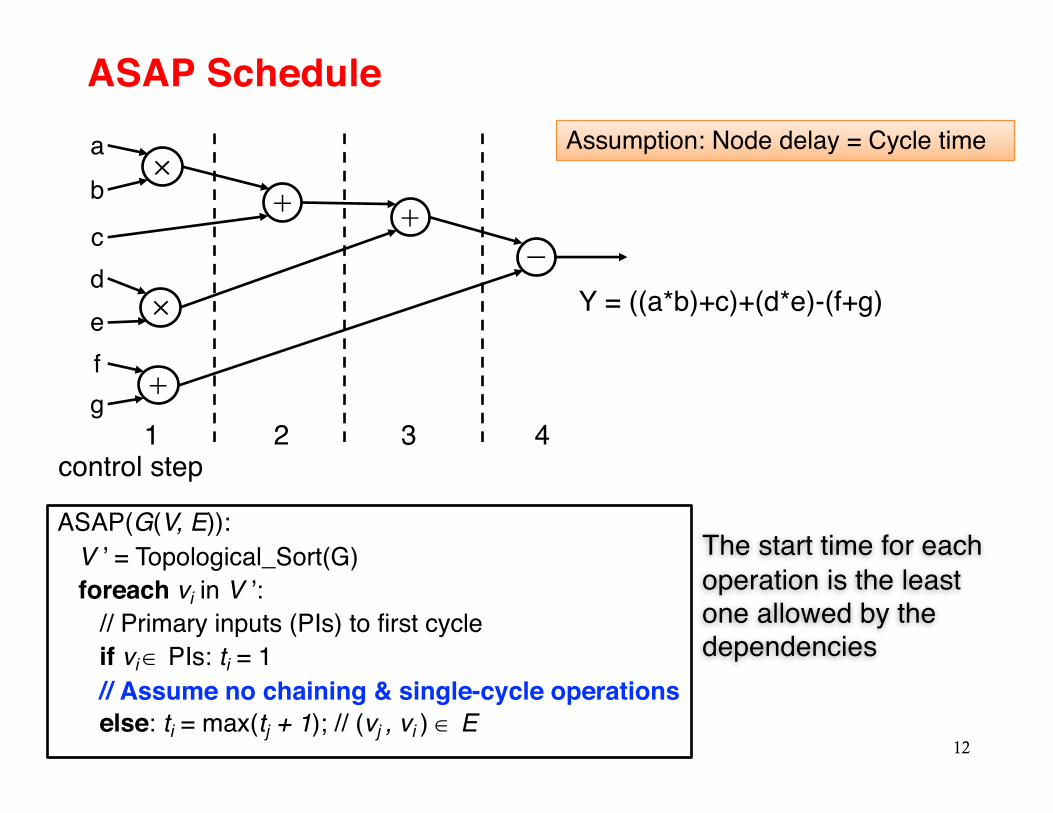
Y = ((a*b)+c)+(d*e)-(f+g)
The start time for each operation is the least one allowed by the dependencies
ASAP(G(V, E)):V ’ = Topological_Sort(G)foreach vi in V ’:
// Primary inputs (PIs) to first cycleif vi Î PIs: ti = 1// Assume no chaining & single-cycle operationselse: ti = max(tj + 1); // (vj , vi ) Î E
control step2 3 41
×
×
+
+ +−
ab
cdefg
ASAP ScheduleAssumption: Node delay = Cycle time
13
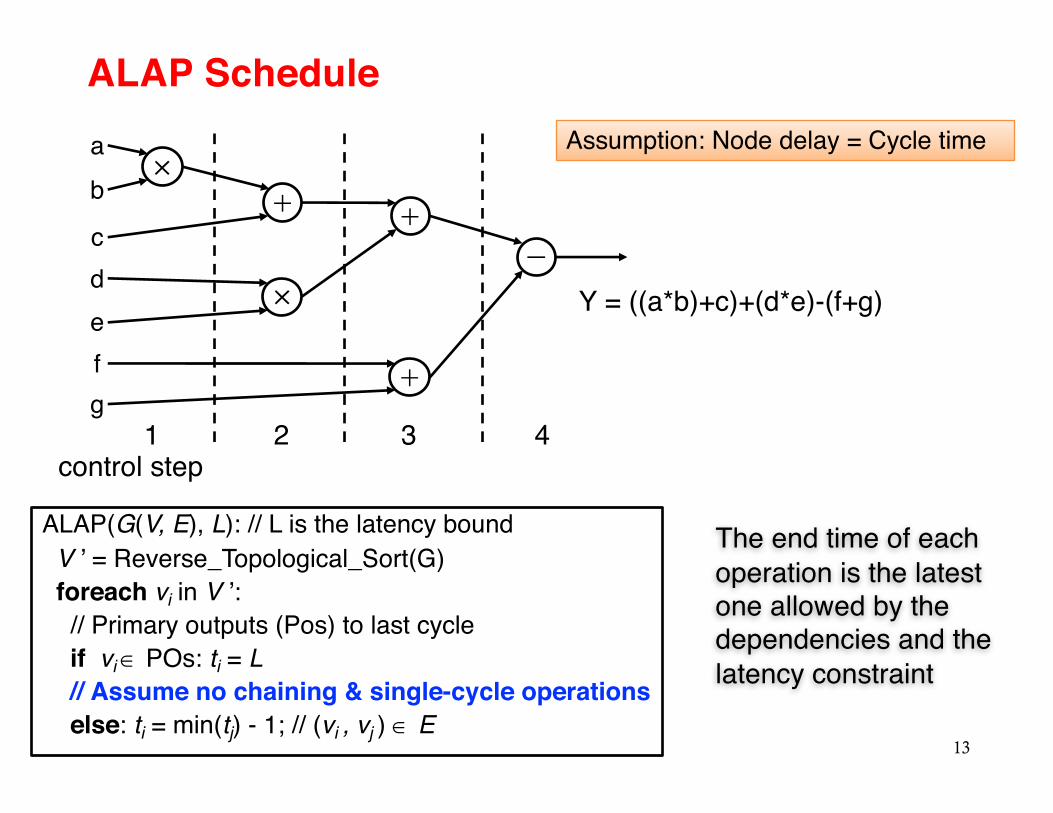
The end time of each operation is the latest one allowed by the dependencies and the latency constraint
ALAP(G(V, E), L): // L is the latency boundV ’ = Reverse_Topological_Sort(G)foreach vi in V ’:// Primary outputs (Pos) to last cycleif vi Î POs: ti = L// Assume no chaining & single-cycle operationselse: ti = min(tj) - 1; // (vi , vj ) Î E
control step
×
×
+
+ +−
2 3 41
ab
cdefg
Y = ((a*b)+c)+(d*e)-(f+g)
ALAP ScheduleAssumption: Node delay = Cycle time
14
Operation Mobility (Slack)
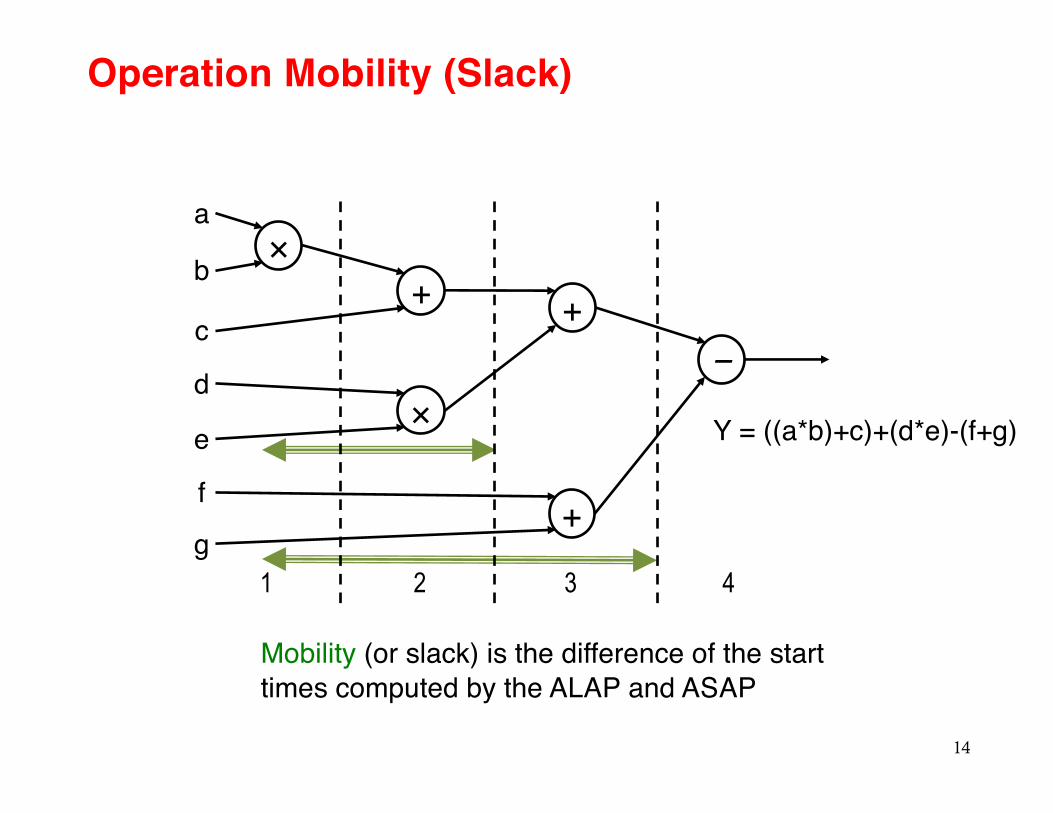
Y = ((a*b)+c)+(d*e)-(f+g)
Mobility (or slack) is the difference of the start times computed by the ALAP and ASAP
×
×
+
+ +−
2 3 41
a
b
c
d
e
f
g

▸ Constrained scheduling– General case NP-hard– Resource-constrained scheduling (RCS)
• Minimize latency given constraints on area or resources– Time-constrained scheduling (TCS)
• Minimize resources subject to bound on latency
▸ Exact methods– Integer linear programming (ILP)– Hu’s algorithm for a very restricted problem
▸ Heuristics– List scheduling– Force-directed scheduling– SDC-based scheduling…
15
Constrained Scheduling

▸ Linear programming (LP) solves the problem of maximizing or minimizing a linear objective function subject to linear constraints
– Efficiently solvable both in theory and in practice
▸ Integer linear programming (ILP): in addition to linear constraints and objective, the values for the variables have to be integer
– NP-Hard in general (A special case, 0-1 ILP)– Modern ILP solvers can handle problems with nontrivial size
▸ Enormous number of problems can be expressed in LP or ILP
16
Linear Programming

17
Canonical Form of ILPmaximize c1x1+c2x2+…+cnxn // objective functionsubject to // linear constraints
a11x1+a12x2+…+a1nxn £ b1a21x1+a22x2+…+a2nxn £ b2….am1x1+am2x2+…+amnxn £ bmxi ≥ 0xi Î Z
maximize cTx // c = (c1, c2, …, cn) subject to
Ax ≤ b // A is a mxn matrix; b = (b1, b2, …, bn)x ≥ 0 andxi Î Z
Vector form

18
Example: Course Selection Problem
▸ A student is about to finalize her course selection for the coming semester, given the following information:
– Minimum credits / semester: 8
Schedule Credits Est. workload
1. Big data analytics MW 2:00-3:30pm
3 8 hrs
2. How to build a start-up TT 2:00-3:00pm 2 4 hrs
3. Linear programming MW 9:00-11:00am
4 10 hrs
4. Analog circuits TT 1:00-3:00pm 4 12 hrs
Question: Which courses to take to minimize the amount of work?

▸ Define decision variables (i = 1, 2, 3, 4):
▸ The total expected work hours:▸ The total credits taken:▸ Account for the schedule conflict:
▸ Complete ILP formulation (in canonical form):minimize 8x1+4x2+10x3+12x4
s.t. 3x1+2x2+4x3+4x4 ≥ 8x2+x4 ≤ 1xi Î {0,1}
19
ILP Formulation for Course Selection
xi =1 if course i is taken0 if not
!"#
$#
Time CRs Work
1. Big data MW 2-3:30pm
3 8 hrs
2. Start-up TT 2-3pm 2 4 hrs
3. Linear prog. MW 9-11am
4 10 hrs
4. Analog TT 1-3pm 4 12 hrs
8x1+4x2+10x3+12x4
3x1+2x2+4x3+4x4x2+x4 ≤ 1

▸ When functional units are limited– Each functional unit can only perform one operation
at each clock cycle• e.g., if there are only K adders, no more than K additions can
be executed in the same c-step
▸ A resource-constrained scheduling problem for DFG – Given the number of functional units of each type,
minimize latency – NP-hard problem
20
Resource Constrained Scheduling (RCS)

▸ Use binary decision variables– xik = 1 if operation i starts at step k, otherwise = 0.
• i = 1, 2, ..., N : N is the total number of operations• k = 1, ..., L : L is the given upper bound on latency
ILP Formulation of RCS
ti = kxikk=1
L
∑
21
ti indicates the start time of operation i

▸ Linear constraints:
– Unique start times:
– Dependence must be satisfied (no chaining)
ILP Formulation of RCS: Constraints (1)
xik =1, i =1,2,...,Nk∑
t j ≥ ti + di +1:∀(vi,vj )∈ E⇒ k x jkk∑ ≥ k xik +
k∑ di +1
22
vj must not start before vi completes since vj depends on vi

Start Time vs. Time(s) of Execution
▸ di : latency of operation i– di = 0 indicates single-cycle combinational logic
▸ When di = 0, then the following questions are the same:– Does operation i start at step k – Is operation i running at step k
▸ But if di > 0, then the two questions should be formulated as:
– Does operation i start at step k• Check if xik = 1 hold
– Is operation i running at step k • Check if the following hold?
23
xill=k−di
k
∑ =1?

▸ Is v9 (d9 = 2) running at step 6?If and only if x9,6 + x9,5 + x9,4 equals 1
▸ Note:– Only one (if any) of the above three cases can happen– To meet resource constraints, we have to ask the same question
for ALL steps, and ALL operations of that type
456
x9,4=1
v9
456
x9,5=1
v9v9
456
x9,6=1
24
Operation vi Still Running at Step k ?

▸ Linear constraints:
– Unique start times:
– Dependence must be satisfied (no chaining)
– Resource constraints
ILP Formulation of RCS: Constraints (2)
xik =1, i =1,2,...,Nk∑
t j ≥ ti + di +1:∀(vi,vj )∈ E⇒ k x jkk∑ ≥ k xik +
k∑ di +1
25
RT(vi) : resource type ID of operation vi (between 1~nres)ar is the number of available resources for resource of type r
xill=k−di
k
∑i:RT (vi )=r∑ ≤ ar, r =1,...,nres, k =1,...,L
▸ Students presenting next Thursday are expected to set up an appointment with the instructor
▸ Next lecture: More scheduling algorithms
26
Before Next Lecture

▸ These slides contain/adapt materials developed by– Ryan Kastner (UCSD)
27
Acknowledgements