sdee: lecture 2
TRANSCRIPT

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Structural Dynamics& Earthquake Engineering
Lecture #2: Equations of Motion for SDoF Oscillators
Dr Alessandro Palmeri
Civil and Building Engineering @ Loughborough University
Tuesday, 2nd February 2016

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Newton’s Second Law of Motion
Sir Isaac Newton(25 Dec 1642 – 20 Mar 1726)
The acceleration −→a of a bodyis parallel and directlyproportional to the net force−→F acting on the body, is in thedirection of the net force, andis inversely proportional to themass m of the body, i.e.
−→F = m−→a (1)

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Newton’s Second Law of Motionr
What are the implications of Newton’s Second Law ofMotion from the point of view of a structural engineer?
Structures are not rigid, therefore they alwaysexperience deformations when subjected to loadsThe acceleration a is the rate of variation of the velocityv , which in turn is the rate of variation of thedisplacement u, that is:
a(t) =ddt
v(t) =d2
dt2 u(t) (2)
It follows that, if the displacements vary rapidely, theinertial forces (proportional to the masses) have to beincluded in the dynamic equilibrium of the structure

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Undamped SDoF Oscillator
������������������������������������������������������������
u(t)
k
m
The figure on the left-handside shows a typical graphicalrepresentation of an unforcedand undamped Single-Degree-of-Freedom (SDoF)oscillator, which consists of:
A rigid mass, ideally movingon frictionless wheels,whose value m is usuallyexpressed in kg (or Mg=103 kg= 1 ton)
An elastic spring, whosestiffness k is usuallyexpressed in N/m (or kN/m)

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Undamped SDoF Oscillator
When the oscillator is displaced (u(t) is positive if directed to theright), then an elastic force fk(t) = k u(t) arises in the spring at thegeneric time t , and is applied to the left on the mass
According to Newton’s Second Law of Motion, the acceleration a(t)is given by the net force acting on the mass m at time t , divided bythe mass itself, i.e. a(t) = fk(t)/m, and is directed to the left as well
The acceleration a(t) is therefore negative, and the inertial forcefm(t) = m a(t) felt by the oscillator is directed to the left in order toreconcile the sign conventions

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Undamped SDoF Oscillator
The equation of motion for this unforced and undamped SDoF oscillatorreads:
fm(t) + fk(t) = 0
∴ m a(t) + k u(t) = 0
∴ m u(t) + k u(t) = 0
where the overdot means derivation with respect to time t :
v(t) =ddt
u(t) = u(t); a(t) =ddt
v(t) = u(t)

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Undamped SDoF Oscillator
The free (i.e. unforced) vibration of an undamped SDoFoscillator is ruled by a 2nd-order homogeneous linearordinary differential equation (ODE) withconstant coefficients:
m u(t) + k u(t) = 0 (3)
This equation can be rewritten as:
u(t) + ω20 u(t) = 0 (4)
where ω0 is the so-called undamped natural circularfrequency of vibration for the SDoF oscillator. This newquantity is expressed in rad/s and is given by:
ω0 =
√km
(5)

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Undamped SDoF Oscillator
Similarly, the undamped natural period of vibration(measured in s) is:
T0 =2πω0
(6)
and the undamped natural frequency of vibration (measuredin Hz= 1/s):
ν0 =1T0
=ω0
2π(7)
The adjective natural is used because such quantities onlydepend on the natural mechanical properties of theoscillator, i.e. the mass m and the stiffness k

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Undamped SDoF Oscillator
Golden Gate BridgeSan Francisco, California
The fundamental naturalperiods of vibration of thisiconic suspension bridge,having the main span of1,300 m, are:
18.2 s for the lateralmovement
10.9 s for the verticalmovement
4.43 s for thetorsional movement

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Undamped SDoF Oscillator
We have then to solve this homogenous differentialequation:
u(t) + ω20 u(t) = 0 (4)
and the solution can be expressed as:
u(t) = C1 cos(ω0 t) + C2 sin(ω0 t) (8)
where C1 and C2 are two arbitrary integration constants,whose values are usually determined by assigning the initialcondition in terms of displacement u(0) = u0 and velocityv(0) = u(0) = v0 at the initial time instant t = 0

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Undamped SDoF Oscillator
The first initial condition leads to:
u(0) = C1 cos(ω0 × 0) + C2 sin(ω0 × 0) = u0
∴ C1 × 1 + C2 × 0 = u0 ⇒ C1 = u0(9)
By differentiating the displacement function u(t), given by Eq. (8),and taking into account the identity above, one gets:
u(t) =ddt
u(t) = −u0 ω0 sin(ω0 t) + C2 ω0 cos(ω0 t)
We can then apply the second initial condition:
u(0) = −u0 ω0 sin(ω0 × 0) + C2 ω0 cos(ω0 × 0) = v0
∴ u0 × 0 + C2 ω0 × 1 = v0 ⇒ C2 =v0
ω0
(10)

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Undamped SDoF Oscillator
Substituting the values of constants C1 and C2, given byEqs. (9) and (10), the mathematical expressions ofdisplacement and velocity of a SDoF experiencing freevibration can be obtained:
u(t) = u0 cos(ω0 t) +v0
ω0sin(ω0 t) (11)
u(t) = v0 cos(ω0 t)− u0 ω0 sin(ω0 t) (12)

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Undamped SDoF Oscillator
By using the trigonometric identities, one can prove that:
u(t) = ρ0 cos(ω0 t + ϕ0) (13)
where ρ0 is the amplitude of the motion and ϕ0 is the phaseat the initial time instant t = 0:
ρ0 =√
C21 + C2
2 =
√u2
0 +
(v0
ω0
)2
(14)
tan(ϕ0) =C2
C1=
v0/ω0
u0=
v0
ω0 u0(15)

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Undamped SDoF Oscillator
u(t)
t
m
a)
u0 ρ0
T0=2π/ω0
t
b)
u(t)
T0=2π/ω0
u0ρ0
u0 >0
c)
u(t)
T0+ϕ0/ω0
u0
tϕ0/ω0
u0 <0
t
d)
ϕ0/ω0
u0 <0
u(t)
u0 >0
ϕ0/ω0
T0 /2+ϕ0/ω0
Free undamped vibration of a SDoF oscillator for given initial conditions: a) u0 > 0and u0 = 0; b) u0 > 0 and u0 > 0; c) u0 > 0 and u0 < 0; d) u0 < 0 and u0 > 0

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Damped SDoF Oscillator
The unrealistic feature of the solution presented in theprevious slides is that the motion of the SDoF oscillatorappears to continue indefinitely
The reason is that the effects of energy dissipationphenomena are not considered
We must include a damping force in the equation of motion,which acts in parallel with the elastic force fk (t) = k u(t),proportional to the displacement, and the inertial forcefm(t) = m u(t), proportional to the acceleration
Damping mechanics are very difficult to model, and thesimplest approach is to assume a viscous type of energydissipation, so that the damping force is proportional to thevelocity:
fc(t) = c u(t) (16)where c is the so-called viscous damping coefficient, usuallyexpressed in N×s/m (or kN×s/m)

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Damped SDoF Oscillator
The equation of motion (with viscous damping) becomes:
m u(t) + c u(t) + k u(t) = 0 (17)
Normalisng all terms with respect to the mass m, oneobtains:
u(t) + 2 ζ0 ω0 u(t) + ω20 u(t) = 0 (18)
where ζ0 is the so-called equivalent viscous damping ratiofor the SDoF oscillator, given by:
ζ0 =c
2 mω0=
cccr
(19)
in which ccr is the so-called critical damping coefficient:
ccr = 2 mω0 = 2√
k m =2 kω0
(20)

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Damped SDoF Oscillator
One can mathematically prove that, assuming initialconditions u(t) = u0 > 0 and v0 = 0:
If c = ccr (or ζ0 = 1), then the system is said to becritically damped, and the mass returns to theequilibrium configuration (u = 0) without oscillatingIf c > ccr (or ζ0 > 1), then the system is said to beoverdamped, and the mass returns to the equilibriumposition at a slower rate, again without oscillatingIf c < ccr (or ζ0 < 1), then the system is said to beunderdamped, and the mass oscillates about theequilibrium position with a progressively decreasingamplitude

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Damped SDoF Oscillator
0 1 2 3 4
-1.0
-0.5
0.0
0.5
1.0
t�T0
uHtL�
u0
Ζ0=3
Ζ0=1
Ζ0=0.25
Ζ0=0.05
Ζ0=0

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Damped SDoF Oscillator
The vast majority of civil engineering structures areunderdamped, and the range of values for the viscousdamping ratio ζ0 is between 0.01 and 0.07, ζ0 = 0.05 beingfor instance the assumed value for reinforced concreteframes and steel frames with bolted joints
The solution of Eq. (18) can be posed in the form:
u(t) = e−ζ0 ω0 t[C1 cos(ω0 t) + C2 sin(ω0 t)
](21)
In this case, the displacement function u(t) is a harmonicwave of circular frequency ω0 and exponentially decayingamplitude. Again, the integration constants C1 and C2 haveto be determined by imposing the initial conditions

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Damped SDoF Oscillator
For the free vibration of an underdamped SDoF system, thetime history of the deflection takes the expression:
u(t) = e−ζ0 ω0 t[u0 cos(ω0 t) +
v0 + ζ0 ω0 u0
ω0sin(ω0 t)
](22)
or, equivalently:
u(t) = ρ0 e−ζ0 ω0 t cos(ω0 t + ϕ0) (23)
in which:
ρ0 =
√C
21 + C
22 =
√u2
0 +
(v0 + ζ0 ω0 u0
ω0
)2
(24)
tan(ϕ0) =C2
C1=
v0 + ζ0 ω0 u0
ω0 u0(25)
StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Damped SDoF Oscillator
u0
t
u(t)u0 > 0
ρ0e-ζ0ω0
t
− ρ0e-ζ0ω0
t
T0=2π/ ω0
ϕ0 / ω0
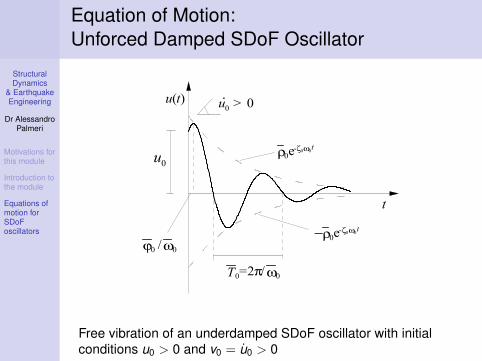
Free vibration of an underdamped SDoF oscillator with initialconditions u0 > 0 and v0 = u0 > 0

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion:Unforced Damped SDoF Oscillator
t
u(t)
0 1 2 3
-50
-25
0
25
50
ζ0=0.05
ζ0=0.1
ζ0=0.2
ζ0=0.4
t
u(t)
0 1 2 3
-50
-25
0
25
50ζ0=0.05
t
u(t)
0 1 2 3
-50
-25
0
25
50 ζ0=0.1
t
u(t)
0 1 2 3
-50
-25
0
25
50ζ0=0.2
t
u(t)
0 1 2 3
-50
-25
0
25
50ζ0=0.4

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion: Forced SDoF Oscillator
�������������������������������������������������������
u(t)
k
c
mF(t)=F 0 sin(ωf t)
a)��������������������������������������������������
u(t)
ku(t)
cu(t).
m
b)
mu(t)..
F(t)=F 0 sin(ωf t)
Let us now consider the forced vibration of a SDoF oscillatorsubjected to an harmonic input F (t) = F0 sin(ωf t), where F0and ωf are amplitude and circular frequency of the force
The figure above shows the sketch of the oscillator (a) andthe forces acting on the mass m at a generic time instant t(b)

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion: Forced SDoF Oscillator
�������������������������������������������������������
u(t)
k
c
mF(t)=F 0 sin(ωf t)
a)��������������������������������������������������
u(t)
ku(t)
cu(t).
m
b)
mu(t)..
F(t)=F 0 sin(ωf t)
The equations of motion in terms of forces is:
m u(t) + c u(t) + k u(t) = F0 sin(ωf t) (26)
and in terms of accelerations is:
u(t) + 2 ζ0 ω0 u(t) + ω20 u(t) =
F0
msin(ωf t) (27)

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion: Forced SDoF Oscillator
The general solution to this inhomogeneous 2nd-order ODEis given by:
u(t) = uh(t) + up(t) (28)
where:up(t) is the particular integral, i.e. any functionsatisfying Eq. (26) (or equivalently Eq. (27)), which inturn depends on the particular forcing function F (t)uh(t) is the general solution of the relatedhomogeneous ODE (Eqs. (17) and (18)), which is givenby the time history of free vibration of the SDoFoscillator with generic integration constants C1 and C2(see Eq. (21))
uh(t) = e−ζ0 ω0 t[C1 cos(ω0 t) + C2 sin(ω0 t)
](29)

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion: Forced SDoF Oscillator
For a sinusoidal load, F (t) = F0 sin(ωf t), the particularintegral takes the expression:
up(t) = ρp sin(ωf + ϕp) (30)
That is, up(t) is again a sinusoidal function with the samecircular frequency ωf as the input, while amplitude ρp andphase angle ϕp are given by:
ρp =F0
k1√
(1− β2)2+ (2 ζ0 β)
2(31)
tan(ϕp) =2 ζ0 β
1− β2 (32)
in which β = ωf/ω0

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion: Forced SDoF Oscillator
ζ0=0
0.0 2.5 5.0 7.5 10.0
-0.50
-0.25
0.00
0.25
0.50
a)
t 0.0 2.5 5.0 7.5 10.0
-0.50
-0.25
0.00
0.25
0.50
b)
t
ζ0=0.05
Dynamic response u(t) of a SDoF oscillator (solid line) compared to theparticular integral up(t) (dashed line) for a sinusoidal excitation(β = ωf/ω0 = 0.2;ω0 = 7 rad/s;F0/m = 10 m/s2; u0 = 0; v0 = 1.5 m/s)and two different values of the viscous damping ratio: a) ζ0 = 0; b)ζ0 = 0.05

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion: Forced SDoF Oscillator
Alternatively, the particular integral for a sinusoidalexcitation can be expressed as:
up(t) = ustD(β) sin(ωf + ϕp) (33)
where:
ust =F0k is the static displacement due to the force F0
D(β) is the so-called dynamic amplification factor,which depends on the frequency ratio β = ωf/ω0:
D(β) =ρp
ust=
1√(1− β2)
2+ (2 ζ0 β)
2(34)

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion: Forced SDoF Oscillator
β
D
0 1 2 3
0
1
2
3
4
5
6
7
8
a)
ζ0=0.0
ζ0=0.1
ζ0=0.2
ζ0=0.3
ζ0=0.5
ζ0=0.7
ζ0=1.0
0 1 2 3
0
ϕp
b)
π/4
π/2
3/4 π
π
β
ζ0=0.0
ζ0=0.1
ζ0=0.2
ζ0=0.3
ζ0=0.5
ζ0=0.7
ζ0=1.0
ζ0=0.0
Dynamic amplification factor D (a) and phase angle ϕp (b) as functions ofthe frequency ratio β for different values of the viscous damping ratio ζ0

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion: Forced SDoF Oscillator
For β → 0, the static case is approached (i.e. D → 1), as the forceF (t) varies very slowly and therefore the mass m can follows it
For β → 1 and ζ0 = 0 (undamped case), the system experience anunbounded resonance, meaning that D → +∞ and (theoretically)the amplitude of the dynamic response keeps increasing with time
If β = 1 and 0 ≤ ζ0 < 0.5, then D > 1, i.e. the amplitude of thesteady-state dynamic response ρp is larger than the staticdisplacement ust; moreover, the less ζ0, the larger is DIf β > 1.41, then D < 1, i.e. (independently of ζ0) the amplitude ofthe steady-state dynamic response ρp is less than the staticdisplacement ust
For β → +∞, the dynamic amplification factor goes to zero (i.e.D → 0), as the force F (t) varies so rapidely that the mass m cannotfollows it
If ζ0 ≥ 0.707, then D < 1, meaning that (independently of thefrequency ratio β) the amplitude of the steady-state dynamicresponse is less than the static displacement

StructuralDynamics
& EarthquakeEngineering
Dr AlessandroPalmeri
Motivations forthis module
Introduction tothe module
Equations ofmotion forSDoFoscillators
Equation of Motion: Forced SDoF Oscillator
0 1 2 3
-3
-2
-1
0
1
2
3β=0.1
ta)
β=0.5
t0 1 2 3
-3
-2
-1
0
1
2
3
b)
β=1
t0 1 2 3
-3
-2
-1
0
1
2
3
c)
β=2
t0 1 2 3
-3
-2
-1
0
1
2
3
d)
Normalised particular integral up(t)/ust (solid line) compared to the normalisedpseudo-static response F (t)/(k ust) (dashed line) for a damped (ζ0 = 0.20) SDoFoscillator subjected to a sinusoidal force F (t) = F0 sin(ω0 t), with ωf = 2π, andfor four different values of the frequency ratio β = ωf/ω0