search by partial solutions. where are we? optimization methods complete solutions partial solutions...
TRANSCRIPT
Search by partial solutions

Where are we?Optimization methodsOptimization methods
Complete solutionsComplete solutionsPartial solutions
Partial solutions
Exhaustive searchHill climbingRandom restartGeneral Model of Stochastic Local SearchSimulated AnnealingTabu search
Exhaustive searchHill climbingRandom restartGeneral Model of Stochastic Local SearchSimulated AnnealingTabu search
Exhaustive searchBranch and boundGreedyBest firstA*Divide and ConquerDynamic programmingConstraint Propagation
Exhaustive searchBranch and boundGreedyBest firstA*Divide and ConquerDynamic programmingConstraint Propagation

Search by partial solutions
nodes are partial or complete states graphs are DAGs (may be trees)
source (root) is empty state sinks (leaves) are complete states
directed edges represent setting parameter values

4 queens:separaterow and column
complete solutions
possible pruningpossible pruning

Implications of partial solutions
pruning of “impossible” partial solutions need partial evaluation function

Partial Solution Trees and DAGs
trees: search might use tree traversal methods based on BFS, DFSadvantage: depth is limited!(contrast to complete solution space)
DAGs: spanning trees

Partial solution algorithms
greedy divide and conquer dynamic programming branch and bound A* constraint propegation

Greedy algorithm
make best ‘local’ parameter selection at each step:
complete solutions

Greedy SAT partial evaluation order of setting propositions T/F
P = {P1, P2,…,Pn}
f(P) = D1 ∧ D2 ∧ ... ∧ Dk
e.g., Di = Pf ∨ ~Pg ∨ Ph
How much pre-processing?

Greedy TSP
partial evaluation order of adding edges
Cities: C1, C2,…,Cn
symmetric distances
How much preprocessing?
C1
C2
C2

Partial solution algorithms
greedy branch and bound A* divide and conquer dynamic programming constraint propegation

4 queens:separaterow and column
complete solutions
possible pruningpossible pruning
More in next slide set…

Branch and Bound
eliminate subtrees of possible solutions based on evaluation of partial solutions
complete solutions

e.g., branch and bound TSP
complete solutions
current best solution distance 498
current best solution distance 498
distance so far 519
distance so far 519

Branch and Bound
requirement a bound on best solution possible
from current partial solution(e.g., if distance so far is 519, total distance is >519) ‘tight’ as possible quick to calculate
a current best solution (e.g., 498)

Tight bounds value of partial solution
plus estimate of value of remaining steps
must be ‘optimistic estimate’
example: path so far: 519remainder of path: 0 (not
tight)bounded estimate: 519

Optimistic but Tight Bound
optimistictight
Current bestCurrent best
Actual values if calculatedActual values if calculated

Example - b&b for TSP
Estimate a lower bound for the path length: Fast to calculate Easy to revise A B C D E
A 7 12 8 11
B 7 10 7 13
C 12 10 9 12
D 8 7 9 10
E 11 13 12 10

Example - b&b for TSP1.Assume shortest edge to each city:(7+7+9+7+10) = 40 A B C D E
2.Assume two shortest edges to each:((7+8)+(7+7)+(9+10)+(7+8)+(10+11))/2 = 7.5 + 7 + 9.5 + 7.5 + 10.5 = 42
Which is better?
A B C D E
A 7 12 8 11
B 7 10 7 13
C 12 10 9 12
D 8 7 9 10
E 11 13 12 10

Tight Bound
(7+7+9+7+10)
A B C D E
A 7 12 8 11
B 7 10 7 13
C 12 10 9 12
D 8 7 9 10
E 11 13 12 10
Path so far 0 40
Path so far 11 44
Path so far 11+13 = 24 47
Best Path found 46
(-7+11)
(-10+13)
A
E
B

B&B algorithm
Depth first traversal of partial solution space - leaves are complete solutions
Subtrees are pruned below a partial solution that cannot be better than the current best solution

Partial solution algorithms
greedy branch and bound A* divide and conquer dynamic programming constraint propegation

A* algorithm - improved b&b
Ultimate partial solution search Based on tree searching algorithms
you already know - bfs, dfs Two versions:
Simple - used on trees Advanced - used on general graphs

general search algorithm for trees*algorithm search (emptyState, fitnessFn()) returns bestState openList = new StateCollection(); openList.insert(emptyState) bestState = null bestFitness = min // assuming maximum wanted while (notEmpty(openList) && resourcesAvailable) state = openList.get()
fitness = fitnessFn(state) // partial or complete fitness if (state is complete and fitness > bestFitness ) bestFitness = fitness
bestState = state for all values k in domain of next variable nextState = state.include(k)
openList.insert(nextState) return solutionState
*For graphs, cycles are a problem

Versions of general search
Based on the openList collection class Breadth first search Depth first search (->branch and bound) Best first search (informed search)
Best first A*
A*
Best first search witha heuristic fitness function:
Admissible (never pessimistic) Tradeoff: Simplicity vs accuracy/tightness
The heuristic heuristic: “Reduced problem” strategy
e.g., min path length in TSP

Partial solution algorithms
greedy branch and bound A* divide and conquer dynamic programming constraint propegation

Divide and Conquer
1. subdivide problem into parts2. solve parts individually3. reassemble parts
examples: sorting – quicksort, mergesort, radix sort ordered trees

Partial solution algorithms
greedy branch and bound A* divide and conquer dynamic programming constraint propegation

Dynamic programming
extreme divide-and-conquer: solve all possible subproblems
works on problems where a good solution to a small problem is always a good partial solution to a larger problem

Example – Knapsack problem
unlimited quantities of items 1, 2, 3, ..., Nare availableeach item has weight w1, w2, w3, ... , wN
each item has value v1, v2, v3, ... , vN
Knapsack has capacity Mmost valuable combination of items to pack?
x1, x2, x3, ... , xN
maximize ∑ xj.vi
constraint: ∑ xj.wj ≤ M

Knapsack Algorithm O(NM)
solve for all sizes up to M with first item repeat with first two items, three, etc
value[M] // array of highest values by capacitylastItem[M] // last item added to achieve value
//(needed to determine contents of knapsack)for j = 1 to N for capacity = 1 to M
if (capacity – wj ) >= 0 if ( value[capacity] < (value[capacity – wj] +
vj))value[capacity] = value[capacity – wj] + vj
lastItem[capacity] = j
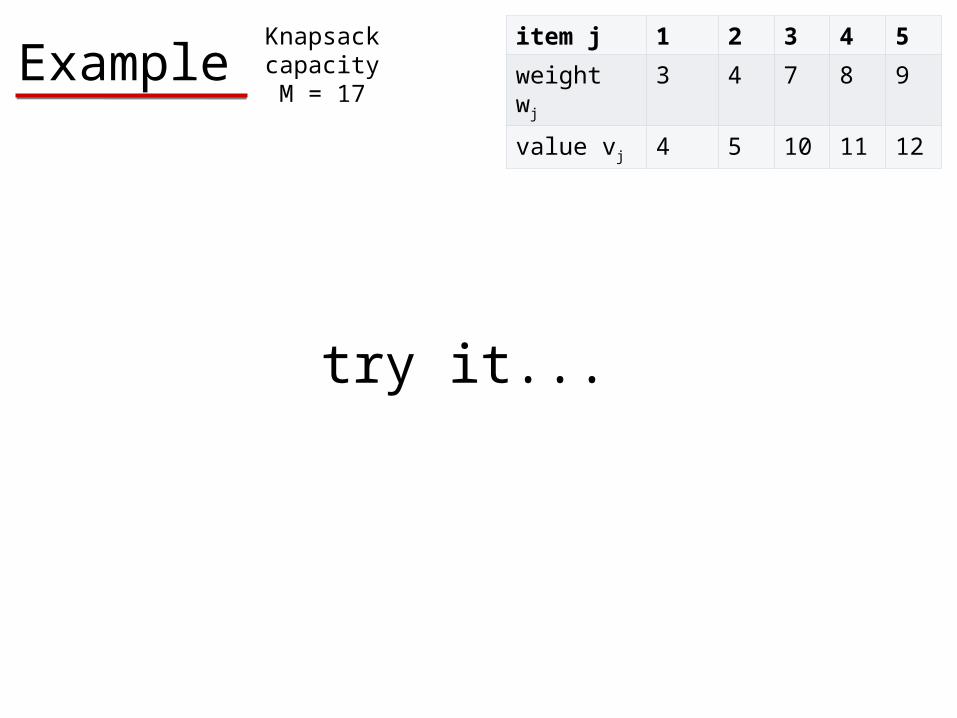
Exampleitem j 1 2 3 4 5
weight wj 3 4 7 8 9
value vj 4 5 10 11 12
Knapsack capacity M = 17
try it...

Exampleitem j 1 2 3 4 5
weight wj 3 4 7 8 9
value vj 4 5 10 11 12
Knapsack capacity M = 17
M 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
value 0 0 4 4 4 8 8 8 12 12 12 16 16 16 20 20 20
lastItem 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
M 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
value 0 0 4 5 5 8 9 10 12 13 14 16 17 18 20 21 22
lastItem 0 0 1 2 2 1 2 2 1 2 2 1 2 2 1 2 2
M 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
value 0 0 4 5 5 8 10 10 12 14 15 16 18 20 20 22 24
lastItem 0 0 1 2 2 1 3 2 1 3 3 1 3 3 1 3 3
M 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
value 0 0 4 5 5 8 10 11 12 14 15 16 18 20 21 22 24
lastItem 0 0 1 2 2 1 3 4 1 3 3 1 3 3 4 3 3
M 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
value 0 0 4 5 5 8 10 11 13 14 15 17 18 20 21 23 24
lastItem 0 0 1 2 2 1 3 4 5 3 3 5 3 3 4 5 3
N = 1

Partial solution algorithms
greedy branch and bound A* divide and conquer dynamic programming constraint propegation
next week